Система вібраційного і акселераційного впливу на імітатор кабіни льотного екіпажу тренажера повітряного транспортного засобу
Номер патенту: 103447
Опубліковано: 10.12.2015
Автори: Іванов Денис Сергійович, Козенко Олександр Юрійович, Жердєв Михайло Федорович
Формула / Реферат
1. Система вібраційного і акселераційного впливу на імітатор кабіни льотного екіпажу тренажера повітряного транспортного засобу, що містить рухому платформу із змонтованими на ній технічними засобами для вібраційного впливу і блок керування і контролю згаданими засобами, виконані з можливістю реалізації вібраційного впливу уздовж поперечної, подовжньої і вертикальної осей імітатора кабіни льотного екіпажа, модельованих програмним комплексом керування тренажером, яка відрізняється тим, що вона містить нерухому платформу і технічні засоби для акселераційного впливу на імітатор кабіни льотного екіпажа, що імітує торкання шасі твердої поверхні в режимі посадки, технічні засоби для вібраційного впливу виконані у вигляді імітаторів високочастотних і низькочастотних вібраційних коливань, імітатор високочастотних вібраційних коливань виконаний у вигляді вібромотора, імітатор низькочастотних вібраційних коливань виконаний у вигляді змонтованих на рамі каркасної конструкції двох взаємозв'язаних за допомогою загального електроприводу ексцентрикових механізмів, один з яких виконаний з можливістю збудження коливань низької частоти і додатково кінематично зв'язаний з лінійним актуатором, а другий виконаний з можливістю збудження коливань накладеної частоти балансування, технічні засоби для акселераційного впливу виконані у вигляді електромагнітів, закріплених на рухомій платформі, при цьому рухома платформа змонтована на нерухомій платформі за допомогою гасителів вібраційних коливань, рама з імітатором низькочастотних вібраційних коливань закріплена на рухомій платформі під гострим кутом щодо її подовжньої осі з можливістю зміни величини цього кута, а електромагніти виконані з можливістю з'єднання з програмним комплексом керування тренажером.
2. Система за п. 1, яка відрізняється тим, що імітатор високочастотних вібраційних коливань закріплений уздовж подовжньої осі рухомої платформи, а рама з імітатором низькочастотних вібраційних коливань розташована таким чином, що напрям рівнодіючої вібраційних сил низької частоти співпадає з центром мас імітатора кабіни льотного екіпажа.
3. Система за п. 1, яка відрізняється тим, що електромагніти змонтовані на рухомій платформі з можливістю акселераційного впливу на імітатор кабіни льотного екіпажа через пружні елементи.
4. Система за п. 1, яка відрізняється тим, що ексцентриковий механізм для збудження коливань низької частоти виконаний у вигляді великого ексцентрика, з'єднаного кінематично з верхньою частиною вертикального вала, нижня частина якого за допомогою клинопасової передачі і шківа з'єднана з електроприводом, ексцентриковий механізм для збудження коливань накладеної частоти балансування виконаний у вигляді кутового редуктора, вхідний вал якого за допомогою клинопасової передачі і шківа з'єднаний із згаданим електроприводом, а вихідний вал за допомогою еластичної муфти з'єднаний з валом, на якому закріплений малий ексцентрик, а лінійний актуатор кінематично зв'язаний з великим ексцентриком за допомогою корбово-поковзневого механізму, виконаного у вигляді повзуна, закріпленого в середній частині вертикального вала з можливістю зворотно-поступального переміщення уздовж нього, тяги для кінематичного з'єднання верхньої частини повзуна з великим ексцентриком і кронштейна для з'єднання нижньої частини повзуна з лінійним актуатором.
5. Система за п. 1, яка відрізняється тим, що лінійний актуатор виконаний з датчиком контролю положення і кінцевим вимикачем, ексцентриковий механізм для збудження коливань низької частоти виконаний з оптичним енкодером, а блок керування і контролю імітаторами високочастотних і низькочастотних вібраційних коливань зв'язаний із згаданими засобами контролю.
Текст
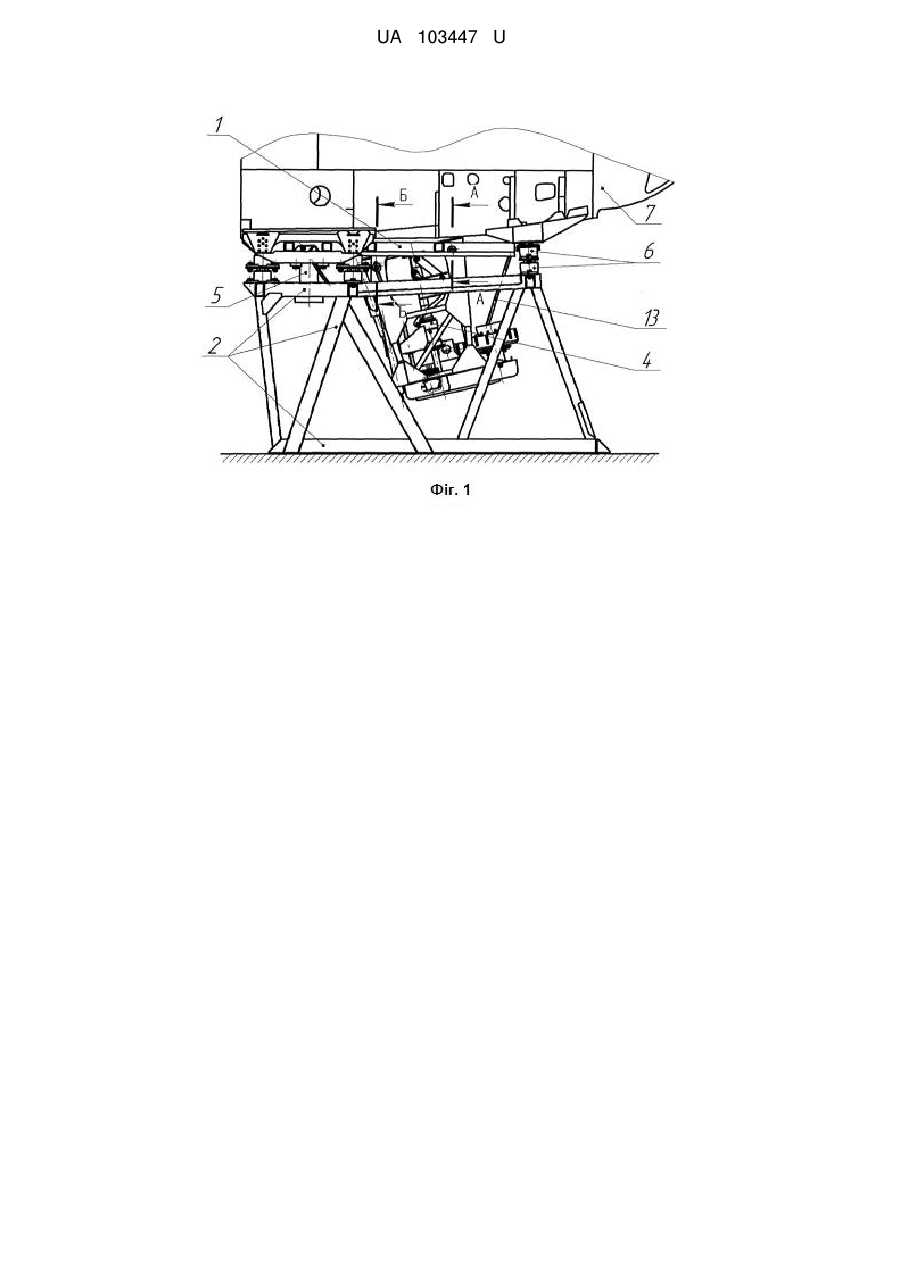
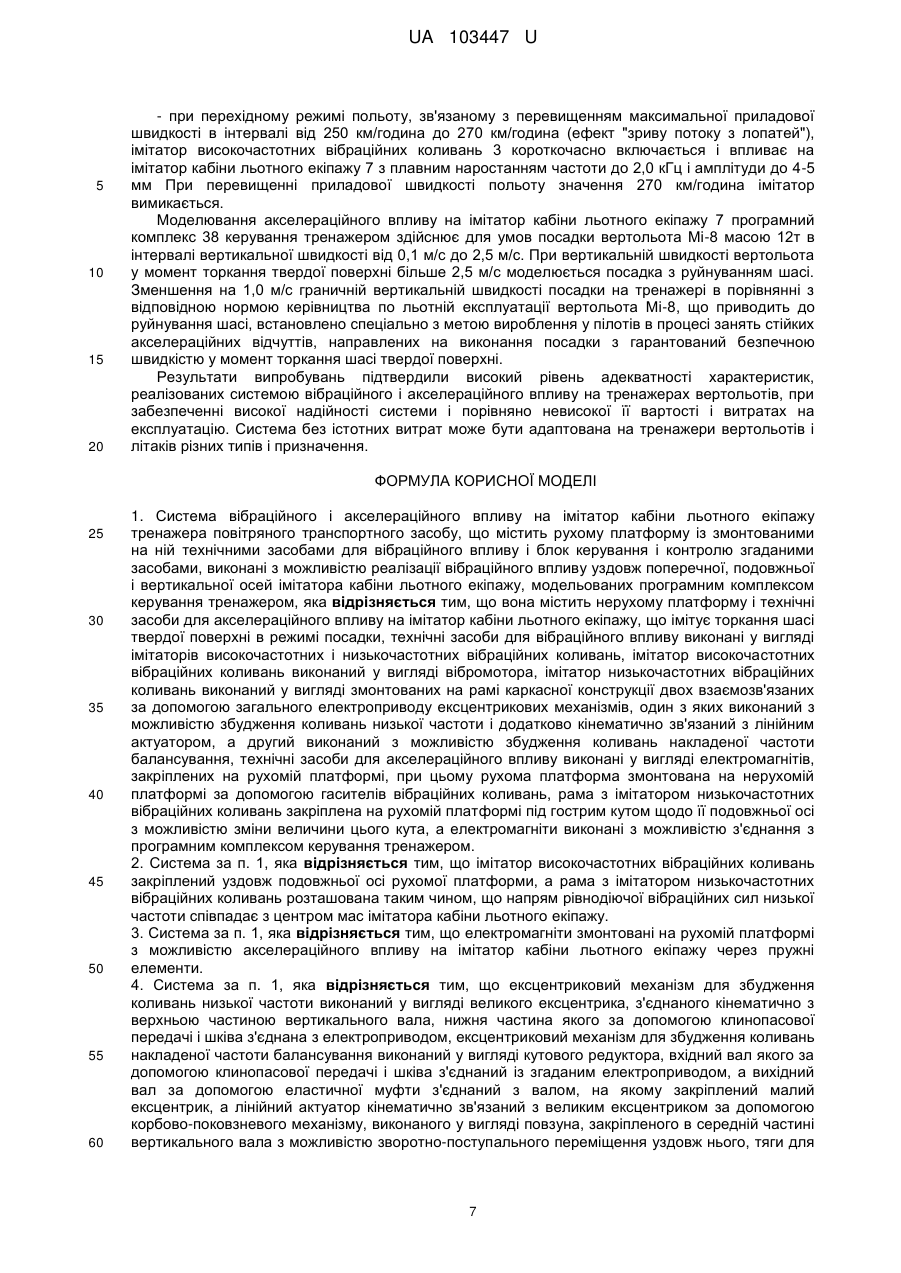
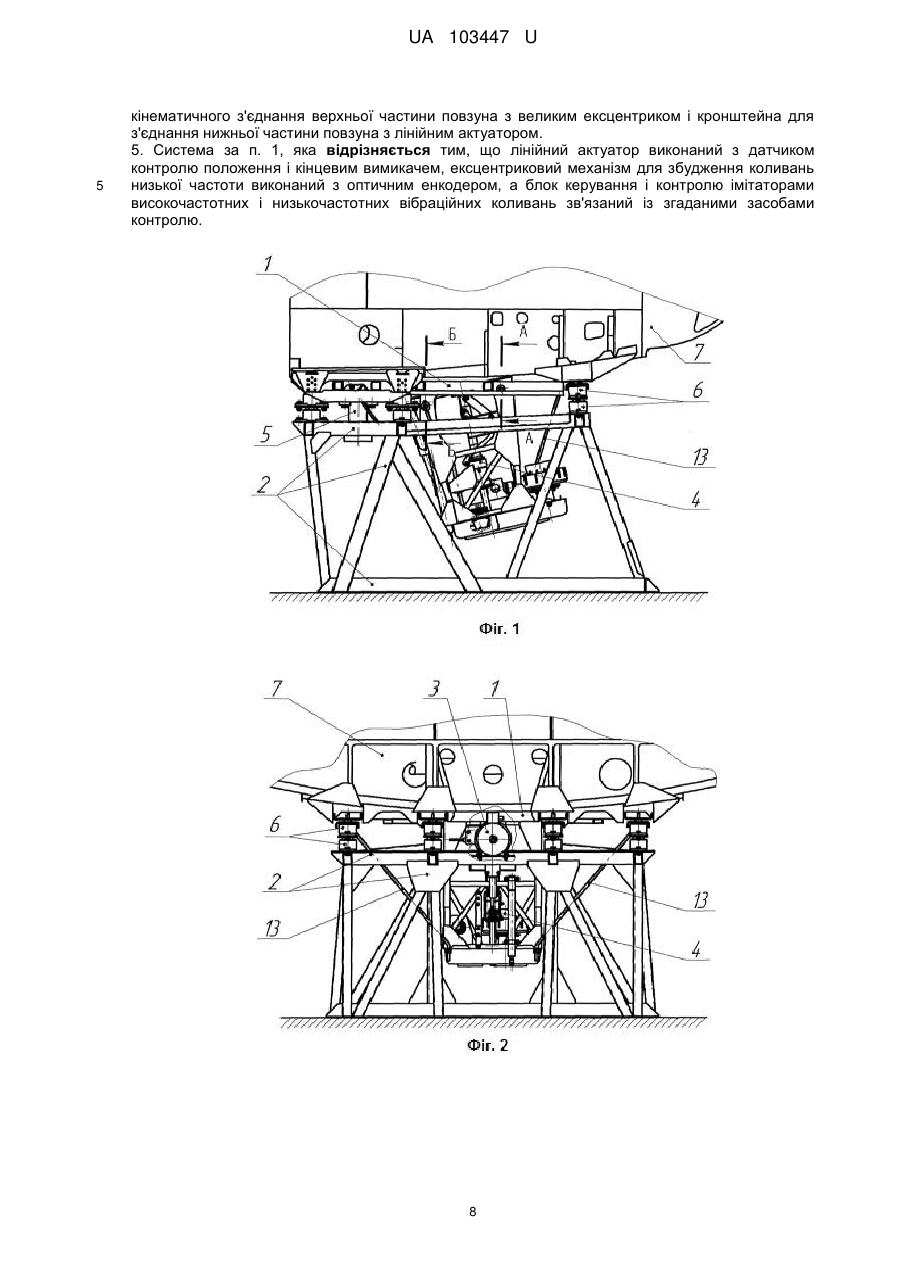
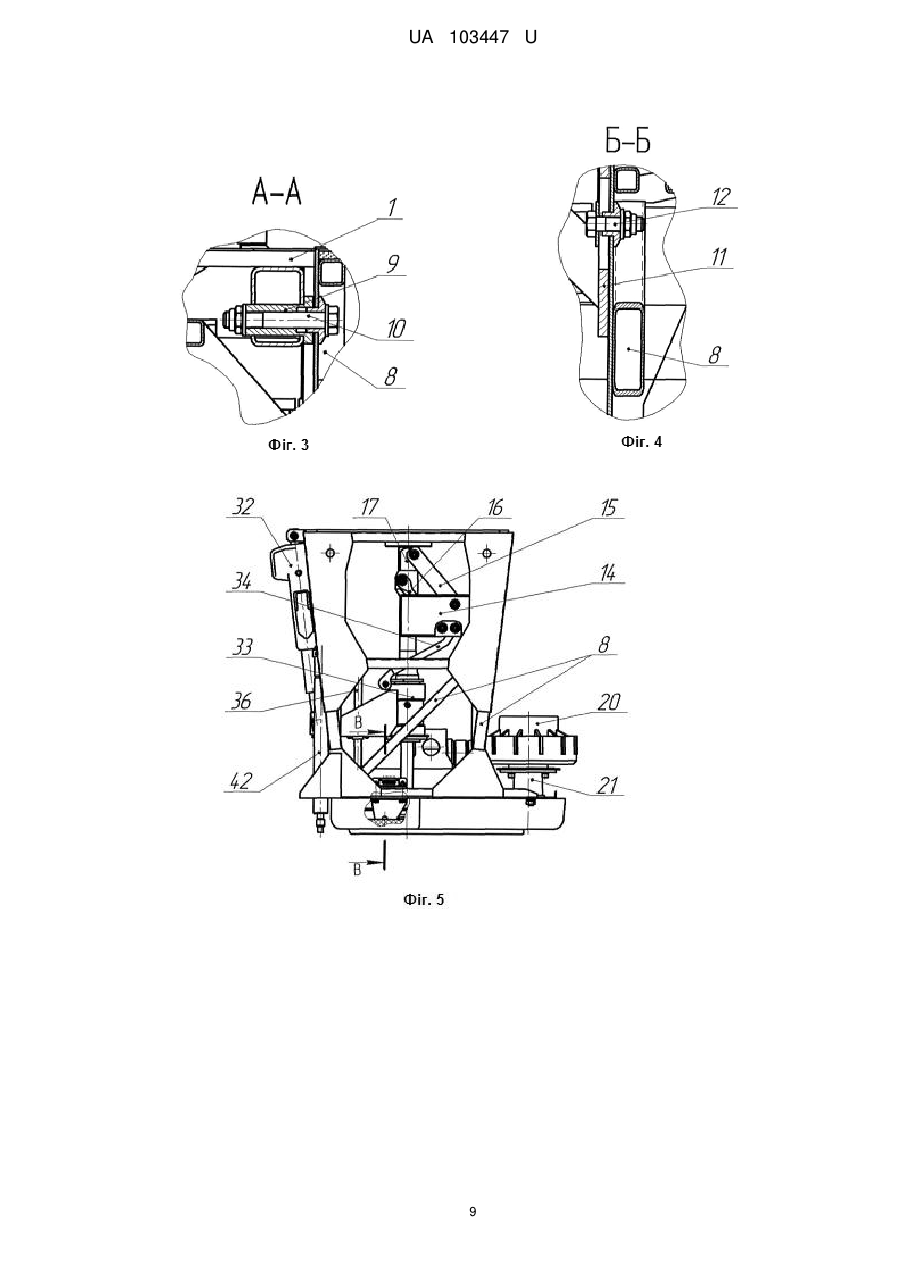
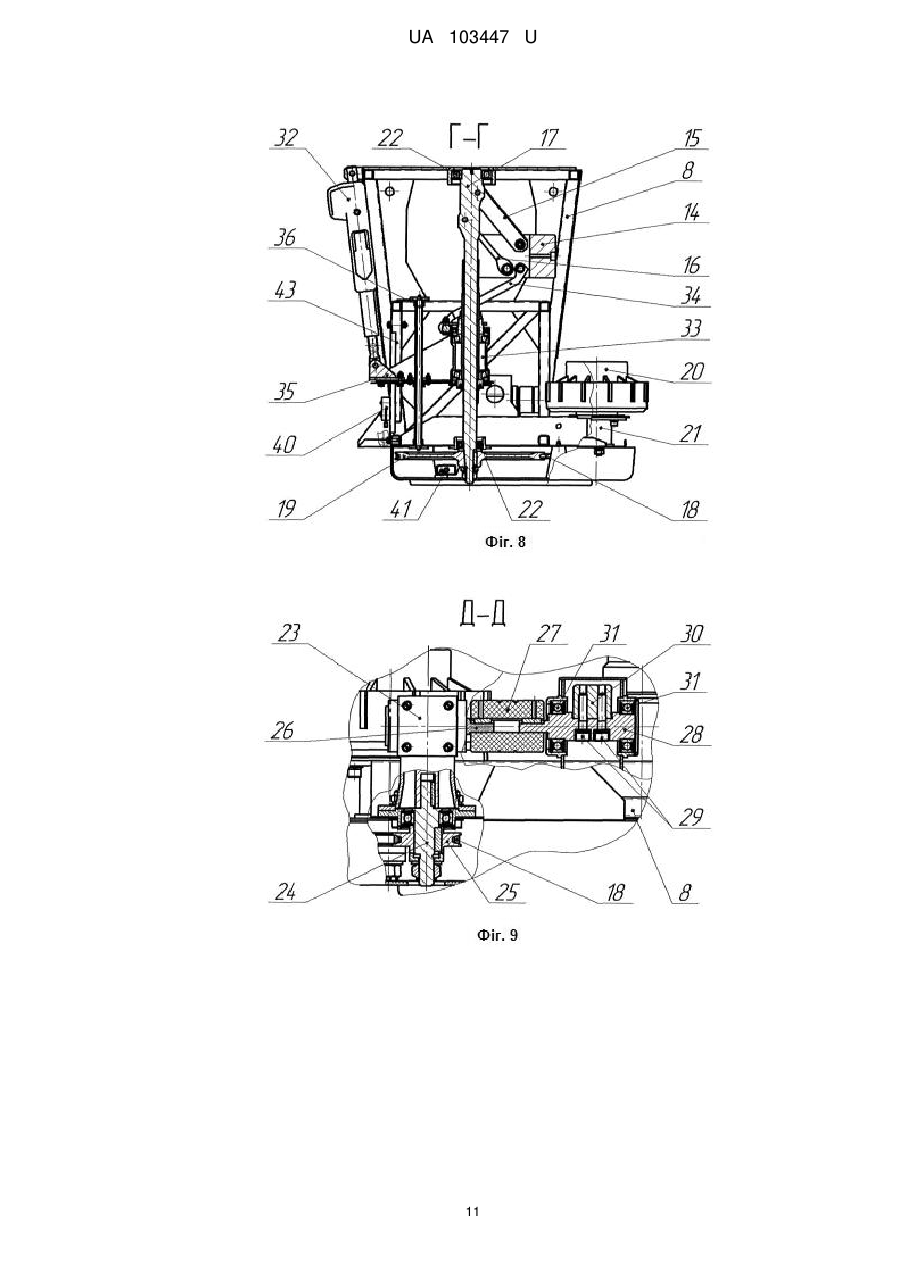
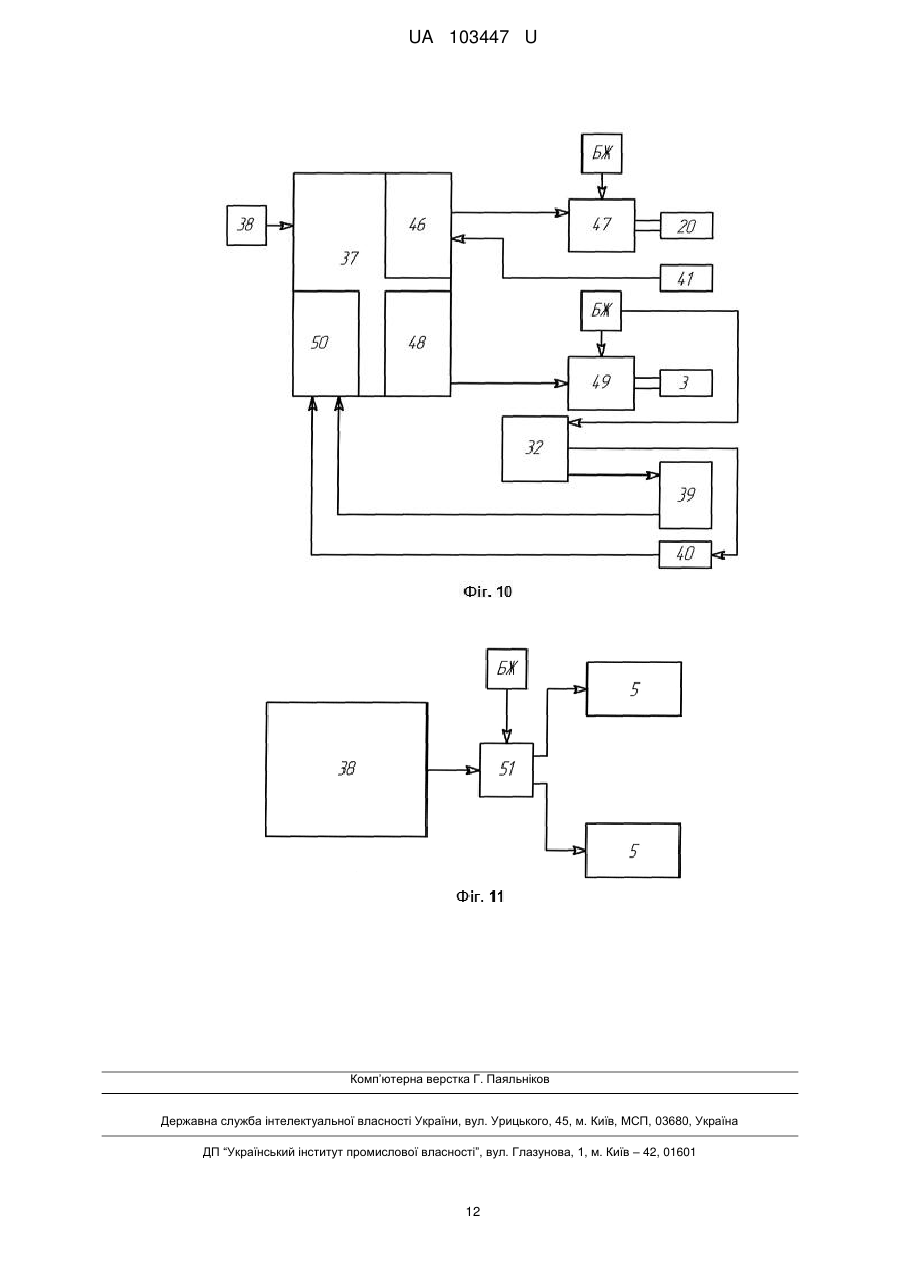
Реферат: Система вібраційного і акселераційного впливу на імітатор кабіни льотного екіпажу тренажера повітряного транспортного засобу містить рухому платформу із змонтованими на ній технічними засобами для вібраційного впливу і блок керування і контролю згаданими засобами, виконані з можливістю реалізації вібраційного впливу уздовж поперечної, подовжньої і вертикальної осей імітатора кабіни льотного екіпажу, модельованих програмним комплексом керування тренажером, причому вона містить нерухому платформу і технічні засоби для акселераційного впливу на імітатор кабіни льотного екіпажу, що імітує торкання шасі твердої поверхні в режимі посадки, технічні засоби для вібраційного впливу виконані у вигляді імітаторів високочастотних і низькочастотних вібраційних коливань, імітатор високочастотних вібраційних коливань виконаний у вигляді вібромотора, імітатор низькочастотних вібраційних коливань виконаний у вигляді змонтованих на рамі каркасної конструкції двох взаємозв'язаних за допомогою загального електроприводу ексцентрикових механізмів, один з яких виконаний з можливістю збудження коливань низької частоти і додатково кінематично зв'язаний з лінійним актуатором, а другий виконаний з можливістю збудження коливань накладеної частоти балансування, технічні засоби для акселераційного впливу виконані у вигляді електромагнітів, закріплених на рухомій платформі, при цьому рухома платформа змонтована на нерухомій платформі за допомогою гасителів вібраційних коливань, рама з імітатором низькочастотних вібраційних коливань закріплена на рухомій платформі під гострим кутом щодо її подовжньої осі з можливістю зміни величини цього кута, а електромагніти виконані з можливістю з'єднання з програмним комплексом керування тренажером. UA 103447 U (12) UA 103447 U UA 103447 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до тренажерів повітряних транспортних засобів, зокрема до технічних і апаратних засобів для реалізації на тренажері вібраційного і акселераційного впливу на імітатор кабіни льотного екіпажу, і може бути використана при професійній підготовці пілотів в наземних умовах. Важливою умовою ефективності застосування тренажерів в учбово-тренувальних процесах навчання щодо керування повітряними транспортними засобами є відповідність рівня адекватності характеристик модельованих на них динамічних процесів характеристикам відповідних типів реальних літальних апаратів і режимів їх польоту. Проте спроби підвищення ступеня достовірності імітації динамічних процесів за допомогою збільшення кількості модельованих режимів і діапазонів їх дії на імітатор кабіни льотного екіпажу в більшості випадків приводять до невиправданого зростання вартості тренажерів, збільшення їх габаритів і маси, а також експлуатаційних витрат. Вирішення цих протиріч вимагає вдосконалення як імітаційних моделей і алгоритмів управління системами вібраційного і акселераційного впливу, так і технічних і апаратних засобів, що реалізують математичні моделі з високим рівнем адекватності дій при обмежених переміщеннях імітатора кабіни льотного екіпажу. Зокрема для тренажерів вертольотів, на відміну від інших повітряних транспортних засобів, основним компонентом дій на льотний екіпаж є різні по частоті, амплітуді і тривалості вібраційні навантаження, специфічні як для кожного типу вертольота, так і для різних режимів їх експлуатації. Вібрації вертольотів викликають, в основному, аеродинамічні і механічні фактори, а їх дія істотно впливає, у тому числі, на комфорт і ефективність роботи льотного екіпажу. У зв'язку з цим, вимогами ІКАО до тренажерів вертольотів передбачено, що моделювання вібраційних ефектів є обов'язковим для типового і високого рівнів адекватності тренажерів, при цьому на тренажерах типового рівня повинні відтворюватися "усереднені вібраційні ефекти", характерні для певної групи вертольотів, а на тренажерах високого рівня - вібраційні ефекти конкретного типу вертольота [Руководство по критериям квалификационной оценки тренажерных устройств имитации полета. Том II/ Вертолеты. Doc 9625, AN/938. Международная организация гражданской авиации. Издание первое. - 2012. - Глава 7. - 644 с.]. Відома система вібраційного впливу на тренажері вертольоту [патент RU 2367026, G09B 9/46, дата публікації 10.09.2009], що виконана у вигляді крісла пілота і взаємодіючої з ним вібраційної подушки. Моделювання вібраційного впливу на крісло здійснюється за допомогою персональної ЕОМ із звуковою картою, а як вібраційна подушка використовується подушка типу "Aura Systems Interactor Cushion". Недоліками відомої системи є: порівняно невеликий діапазон низькочастотних вібраційних впливів, характеристики яких по частоті і амплітуді з достатнім ступенем ідентичності можуть відповідати реальним вертольотам різних типів і різним режимам їх експлуатації; недостатній ступінь ідентичності вібраційних відчуттів у членів екіпажу в порівнянні з реальним умовами експлуатації вертольота, оскільки вібраційні дії передаються на крісло пілота, а не на імітатор кабіни льотного екіпажу; недотримання умов ІКАО про ідентичність крісел в імітаторі кабіни льотного екіпажу з кріслами в кабіні реального вертольота. Вказані недоліки практично виключають можливість використання зазначеної системи на тренажерах вертольотів при професійній підготовці пілотів. Відома система вібраційного і акселераційного впливу на тренажері вертольота [патент UA 105695, F41G 3/00, G09B 7/00, G09B 9/00, G09B 9/04, дата публікації 10.06.2014], що виконана у вигляді трьох рухомих платформ, послідовно змонтованих одна над одною: вібраційної платформи з трьома ступенями свободи, змонтованої за допомогою демпфувальних елементів на динамічній платформі з шістьма ступенями свободи, яка, у свою чергу, жорстко закріплена на платформі кругового обертання. Вібраційна платформа містить три електромеханічні приводи, пристрій узгодження і блок керування, виконаний з можливістю реалізації модельованих програмним комплексом керування тренажером вібраційного впливу уздовж поперечної, подовжньої і вертикальної осей імітатора кабіни льотного екіпажу. Динамічна платформа виконана з можливістю імітації акселераційного впливу, що виникає при зміні кутів крену, курсу, тангажу і при лінійних зміщеннях імітатора кабіни льотного екіпажу уздовж вертикальної, подовжньої і поперечної осей. Платформа кругового обертання виконана у вигляді приводу, жорстко закріпленого на основі приміщення, і контактного пристрою, виконаного з можливістю передачі електроживлення на приводи динамічної і вібраційної платформ і на імітатор кабіни льотного екіпажу, що обертається. Недоліками відомої системи є: обмежений діапазон характеристик вібраційного впливу, що реалізується технічними засобами на рухомій (вібраційній) платформі; 1 UA 103447 U 5 10 15 20 25 30 35 40 45 50 55 60 відсутність технічних засобів для імітації акселераційної дії, що виникає при торканні шасі вертольота твердої поверхні при посадці; недостатня стабільність характеристик вібраційного впливу (з урахуванням їх ортогональних проекцій) на імітатор кабіни льотного екіпажу в порівнянні з характеристиками, модельованими програмним комплексом керування тренажером, обумовлена розміщенням рухомої (вібраційної) платформи на рухомій (динамічній) платформі і їх сумісними кутовими і просторовими переміщеннями при виконанні учбово-тренувальних задач; недостатня надійність механічних взаємозв'язків рухомих платформ при експлуатації, обумовлена використанням платформи, що обертається, як загальною основою, що підвищує вірогідність виникнення аварійних ситуацій при зносі елементів опорних вузлів або перевищенні допустимих навантажень; складне конструктивне виконання взаємозв'язків платформ між собою і з відповідними технічними засобами, що істотно збільшує вартість виготовлення і експлуатації тренажера і, відповідно, область його застосування. Вказані недоліки істотно ускладнюють процес моделювання вібраційного впливу на імітатор кабіни льотного екіпажу, обмежують діапазони вібраційних ефектів, ступінь ідентичності яких по рівнях адекватності може відповідати характерним ефектам на реальних вертольотах, а також ускладнюють переналагодження характеристик вібраційних дій для різних типів вертольотів і режимів їх експлуатації. В основу корисної моделі поставлена задача удосконалення системи вібраційного і акселераційного впливу на імітатор кабіни льотного екіпажу тренажера повітряного транспортного засобу за рахунок іншого виконання технічних засобів для реалізації вібраційного впливу і введення технічних засобів для реалізації іншого акселераційного впливу, що забезпечують істотне розширення функціональних можливостей системи і підвищення її надійності при порівняно невисокій вартості і витратах на експлуатацію. Технічний результат від реалізації поставленої задачі полягає в забезпеченні формування широкого діапазону тривалих високочастотних і низькочастотних вібраційних коливань на імітатор кабіни льотного екіпажу в поєднанні з акселераційним впливом у вигляді ударних імпульсів, що імітують торкання шасі твердої поверхні в режимі посадки при одночасному забезпеченні високого рівня адекватності характеристик імітованого впливу порівняно з відповідними характеристиками реальних повітряних транспортних засобів, у тому числі при їх експлуатації в різних режимах. Розширення частотного і амплітудного діапазонів вібраційного впливу забезпечує, у свою чергу, можливість переналагодження технічних засобів з урахуванням реалізації на тренажерах особливостей вібраційних ефектів на повітряних транспортних засобах різних типів і різних режимів їх експлуатації. Поставлена задача вирішується тим, що система вібраційного і акселераційного впливу на імітатор кабіни льотного екіпажу тренажера повітряного транспортного засобу, що містить рухому платформу із змонтованими на ній технічними засобами для вібраційного впливу і блок керування і контролю згаданими засобами, виконані з можливістю реалізації вібраційного впливу уздовж поперечної, подовжньої і вертикальної осей імітатора кабіни льотного екіпажу, модельованих програмним комплексом керування тренажером, згідно з корисною моделлю, містить нерухому платформу і технічні засоби для акселераційного впливу на імітатор кабіни льотного екіпажу, що імітує торкання шасі твердої поверхні в режимі посадки, технічні засоби для вібраційного впливу виконані у вигляді імітаторів високочастотних і низькочастотних вібраційних коливань, імітатор високочастотних вібраційних коливань виконаний у вигляді вібромотора, імітатор низькочастотних вібраційних коливань виконаний у вигляді змонтованих на рамі каркасної конструкції двох взаємозв'язаних за допомогою загального електроприводу ексцентрикових механізмів, один з яких виконаний з можливістю збудження коливань низької частоти і додатково кінематично зв'язаний з лінійним актуатором, а другий виконаний з можливістю збудження коливань накладеної частоти балансування, технічні засоби для акселераційного впливу виконані у вигляді електромагнітів, закріплених на рухомій платформі, при цьому рухома платформа змонтована на нерухомій платформі за допомогою гасителів вібраційних коливань, рама з імітатором низькочастотних вібраційних коливань закріплена на рухомій платформі під гострим кутом щодо її подовжньої осі з можливістю зміни величини цього кута, а електромагніти виконані з можливістю з'єднання з програмним комплексом керування тренажером. Доцільно, щоб імітатор високочастотних вібраційних коливань був закріплений уздовж подовжньої осі рухомої платформи, а рама з імітатором низькочастотних вібраційних коливань розташована таким чином, що напрям рівнодіючої низької частоти вібраційних сил співпадає з центром мас імітатора кабіни льотного екіпажу. 2 UA 103447 U 5 10 15 20 25 30 35 40 45 50 55 60 Доцільно, щоб електромагніти були змонтовані на рухомій платформі з можливістю акселераційного впливу, а імітатор кабіни льотного екіпажу через пружні елементи. Доцільно, щоб ексцентриковий механізм для збудження коливань низької частоти був виконаний у вигляді великого ексцентрика, з'єднаного кінематично з верхньою частиною вертикального вала, нижня частина якого за допомогою клинопасової передачі і шківа з'єднана з електроприводом, ексцентриковий механізм для збудження коливань накладеної частоти балансування виконаний у вигляді кутового редуктора, вхідний вал якого за допомогою клинопасової передачі і шківа з'єднаний із згаданим електроприводом, а вихідний вал за допомогою еластичної муфти з'єднаний з валом, на якому закріплений малий ексцентрик, а лінійний актуатор кінематично зв'язаний з великим ексцентриком за допомогою корбовопоковзневого механізму, виконаного у вигляді повзуна, закріпленого в середній частині вертикального вала з можливістю зворотно-поступального переміщення уздовж нього, тяги для кінематичного з'єднання верхньої частини повзуна з великим ексцентриком і кронштейна для з'єднання нижньої частини повзуна з лінійним актуатором. Доцільно, щоб лінійний актуатор був виконаний з датчиком контролю положення і кінцевим вимикачем, ексцентриковий механізм для збудження коливань низької частоти виконаний з оптичним енкодером, а блок керування і контролю імітаторами високочастотних і низькочастотних вібраційних коливань зв'язаний із згаданими засобами контролю. Вдосконалена система вібраційного і акселераційного впливу на імітатор кабіни льотного екіпажу тренажера повітряного транспортного засобу забезпечує досягнення технічного результату, що заявляється. Зокрема виконання системи з нерухомою платформою, на якій за допомогою гасителів вібраційних коливань змонтована рухома платформа, дозволяє, по-перше, виключити вплив на рухому платформу інших дій, окрім вібраційних навантажень, і за рахунок цього забезпечити стабільність характеристик вібраційних дій на імітатор кабіни льотного екіпажу, модельованих програмним комплексом керування тренажером, і по-друге, забезпечити достатню стійкість і надійність конструкції системи при експлуатації. Розміщення на рухомій платформі технічних засобів для реалізації акселераційного впливу на імітатор кабіни льотного екіпажу, що імітують торкання шасі твердої поверхні в режимі посадки, дозволяє розширити функціональні можливості системи і, відповідно, область її застосування. Виконання технічних засобів для реалізації вібраційного впливу у вигляді імітаторів високочастотних і низькочастотних вібраційних коливань істотно розширює частотний і амплітудний діапазони дій на імітатор кабіни льотного екіпажу, що дозволяє реалізувати математичні моделі вібраційних ефектів, характерні для повітряних транспортних засобів різних типів і різних режимів їх експлуатації, і, відповідно, розширити область застосування системи. Виконання імітатора високочастотних вібраційних коливань у вигляді вібромотора, а імітатора низькочастотних вібраційних коливань - у вигляді змонтованих на рамі двох взаємозв'язаних за допомогою загального електроприводу ексцентрикових механізмів, один з яких виконаний з можливістю збудження коливань низької частоти і додатково кінематично зв'язаний з лінійним актуатором, а другий виконаний з можливістю збудження коливань накладеної частоти балансування, дозволяє забезпечити більш "тонку настройку" частотних і амплітудних характеристик роздільних і сумісних режимів вібраційного впливу і за рахунок цього істотно підвищити рівень їх адекватності на тренажерах. Закріплення рами із змонтованим на ній імітатором низькочастотних вібраційних коливань на рухомій платформі під гострим кутом щодо її подовжньої осі дозволяє реалізувати вібраційний вплив на імітатор кабіни льотного екіпажу уздовж його ортогональних проекцій по осях X, У і Z, а можливість зміни згаданого кута дозволяє істотно розширити діапазон моделювання низькочастотних вібраційних коливань стосовно різних типів повітряних транспортних засобів і режимів їх експлуатації. Вказаний технічний результат досягається при порівняно невисоких вартості системи і витратах на її експлуатацію. Система вібраційного і акселераційного впливу, що заявляється, пояснюється на прикладі її конструкції, розробленої Товариством з обмеженою відповідальністю "ХЕЛІТРЕЙНІНГ УКРАЇНА" (м. Кременчук, Україна) і реалізованої на комплексному тренажері вертольота класу FTD/УЛТ-II: Мі-8МСБ/Ми-8Т, Мі-171, МІ-8МТВ. Суть системи, що заявляється, пояснюється фігурами креслень, де на фіг. 1 приведений загальний вид системи вібраційного і акселераційного впливу, вид збоку; на фіг. 2 - те ж, вид ззаду; на фіг. 3 - переріз А-А на фіг. 1; на фіг. 4 - переріз Б-Б на фіг. 1; на фіг. 5 - загальний вид імітатора низькочастотних вібраційних коливань, вид спереду; на фіг. 6 - те ж, вигляд збоку; на фіг. 7 - переріз В-В на фіг. 5; на фіг. 8 - переріз Г-Г на фіг. 6; на фіг. 9 - переріз Д-Д на фіг. 6; на 3 UA 103447 U 5 10 15 20 25 30 35 40 45 50 55 60 фіг. 10 - принципова схема керування імітаторами вібраційних коливань; на фіг. 11 - принципова схема керування імітатором торкання шасі при посадці. Система вібраційного і акселераційного впливу на імітатор кабіни льотного екіпажу тренажера повітряного транспортного засобу складається (фіг. 1, 2) з рухомої платформи 1 і нерухомої платформи 2, імітатора високочастотних вібраційних коливань 3 і імітатора низькочастотних вібраційних коливань 4, імітатора акселераційного впливу 5, що виникають при торканні шасі вертольота твердої поверхні, і системи керування і контролю зазначеними імітаторами 3 і 4. Рухома платформа 1 змонтована на нерухомій платформі 2 за допомогою гасителів вібраційних коливань 6. Імітатор кабіни льотного екіпажу 7 жорстко закріплений на верхній поверхні рухомої платформи 1 уздовж її подовжньої осі таким чином, що їх центри мас співпадають. Імітатор високочастотних вібраційних коливань 3 виконаний у вигляді вібромотору, закріпленого за допомогою болтових з'єднань (не позначені) на рухомій платформі 1 уздовж її подовжньої осі в зоні задньої частини імітатора кабіни льотного екіпажу 7 (фіг. 1, 2). Характеристики вібромотору вибирають за умови реалізації вібраційних коливань на імітатор кабіни льотного екіпажу 7 в динамічному діапазоні від 0,5 до 3,0 КГц. Імітатор низькочастотних вібраційних коливань 4 змонтований (фіг. 5, 6, 8) на рамі 8 каркасної конструкції, закріпленої на нижній поверхні рухомої платформи 1 під гострим кутом щодо її подовжньої осі (фіг. 1,2). При цьому лінія дії рівнодіючої вібраційних сил від імітатора низькочастотних вібраційних коливань 4 співпадає з центром мас рухомої платформи 1 і закріпленого на ній імітатора кабіни вертольота 7. Кріплення рами 8 до рухомої платформи 1 виконано з одного боку у вигляді шарнірного з'єднання, що складається з втулок 9 і болтових з'єднань 10, а з протилежної сторони - з кронштейнів 11, що містять прорізи радіусів, і болтових з'єднань 12 (фіг. 3, 4). Вказане кріплення дозволяє змінювати кут нахилу імітатора низькочастотних вібраційних коливань 4 щодо рухомої платформи 1. Окрім цього, положення рами 8 щодо рухомої платформи 1 зафіксовано за допомогою передньої і бічних розтяжок 13 (фіг. 1, 2). Імітатор низькочастотних вібраційних коливань 4 складається (фіг. 5, 6, 8) з ексцентрикового механізму для низькочастотних вібраційних коливань, зв'язаного за допомогою загального електроприводу з ексцентриковим механізмом балансування і додатково за допомогою коробково-поковзневого механізму кінематично зв'язаного з лінійним актуатором. Ексцентриковий механізм для низькочастотних вібраційних коливань складається (фіг. 8) з великого ексцентрика 14, за допомогою тяги 15 і 16 кінематично з'єднаного з верхньою частиною вертикального вала 17, нижня частина якого за допомогою клинопасової передачі 18 і шківа 19 з'єднана з електроприводом 20, закріпленим на консольному майданчику 21 із зовнішньої сторони рами 8. Нижній і верхній кінці вертикального вала 17 закріплені в підшипниках 22 уздовж подовжньої осі рами 8. Ексцентриковий механізм коливань накладеної частоти (хвилі) балансування закріплений в нижній частині рами 8 і складається (фіг. 9) з кутового редуктора 23, вхідний вал 24 якого за допомогою клинопасової передачі 18 і шківа 25 з'єднаний з електроприводом 20. Вихідний вал 26 згаданого редуктора 23 через еластичну муфту 27 з'єднаний з валом 28, на якому за допомогою болтових з'єднань 29 закріплений малий ексцентрик 30, обертання якого балансує низькочастотні вібраційні коливання великого ексцентрика 14. Вал 28 закріплений в підшипниках 31. Лінійний актуатор 32 закріплений на зовнішній стороні рами 8 і кінематично зв'язаний з великим ексцентриком 14 за допомогою корбово-поковзневого механізму, що складається з повзуна 33, виконаного з можливістю зворотно-поступального переміщення уздовж вертикального вала 17 і кінематично зв'язаного з великим ексцентриком 14 за допомогою тяги 34 (фіг. 5, 8). Нижні частини лінійного актуатора 32 і повзуна 33 з'єднані між собою за допомогою кронштейна 35, виконаного з можливістю переміщення уздовж вертикальної напрямної 36. Керування частотою низькочастотних вібраційних коливань здійснюють шляхом зміни числа обертів великого ексцентрика 14 за допомогою електроприводу 20, а амплітудою коливань - шляхом зворотно-поступального переміщення великого ексцентрика 14 уздовж вертикального вала 17 за допомогою лінійного актуатора 32 і корбово-поковзневого механізму. Імітатор низькочастотних вібраційних коливань 4 забезпечує динамічний діапазон від 0 до 50 Гц. Маса імітатора низькочастотних вібраційних коливань 4 складає близько 84 кг, а габаритні розміри: ширина - 0,54 м, довжина - 0,68 м і висота - 0,67 м. Керування імітатором високочастотних вібраційних коливань 3 і імітатором низькочастотних вібраційних коливань 4 здійснюють в автоматичному режимі за допомогою блока керування і 4 UA 103447 U 5 10 15 20 25 30 35 40 45 50 55 60 контролю 37, який за допомогою шини (не позначена) зв'язаний з програмним комплексом 38 керування тренажером (фіг. 10). Виконання блока керування і контролю 37 у вигляді локального апаратного пристрою дозволяє відділити відповідну частину задач керування і реалізації вібраційного впливу від програмного комплексу 38 керування тренажером і за рахунок цього зменшити трудовитрати на наладку технічних засобів на різні характеристики вібраційного впливу з урахуванням типів модельованих вертольотів і режимів їх експлуатації. Об'єктами керування є вібромотор - імітатор високочастотних вібраційних коливань 3, електропривод 20 і лінійний актуатор 32, що зв'язані з блоком керування і контролю 37 за допомогою відповідних шин. Живлення вібромотора - імітатора високочастотних вібраційних коливань 3 і лінійного актуатора 32 здійснюється від блока живлення (БЖ) з джерелом постійної напруги 24В, а електроприводу 20 - від блока живлення (БЖ) з джерелом постійної напруги 48В. До складу системи керування входять також засоби контролю (фіг. 7, 10): - датчик положення 39 лінійного актуатора 32; - кінцевий вимикач 40 лінійного актуатора 32; - оптичний енкодер 41 частоти обертання шківа 19. Як датчик положення 39 використовують магнітострикційний датчик переміщень, який закріплений на стійці 42 (фіг. 5, 6). Кінцевий вимикач 40 закріплений на стійці 43 (фіг. 6, 8). Оптичний енкодер 41 містить фотоелемент 44 і світлодіод 45, закріплені, відповідно, над і під шківом 19 (фіг. 7, 8). Система забезпечує реалізацію сумісних і роздільних низькочастотного і високочастотного вібраційних впливів на імітатор кабіни льотного екіпажу 7. При цьому імітатор низькочастотних вібраційних коливань 4 впливає на імітатор кабіни льотного екіпажу 7, як правило, при імітації на тренажері вправ, що виконуються при номінальному режимі роботи двигунів з обертами несучого гвинта 93,5 %. Імітатор високочастотних вібраційних коливань 3 впливає на імітатор кабіни льотного екіпажу 7, в основному, в режимі набору швидкості і при перехідних режимах польоту, наприклад, в інтервалах приладової швидкості польоту приблизно від 50 км/год. до 65 км/год. (перехід "на косий обдув") і приблизно від 250 км/год. до 270 км/година (ефект "зриву потоку з лопатей"). Імітатор акселераційного впливу 5, що виникає при торканні шасі твердої поверхні, виконаний у вигляді двох електромагнітів (не позначені), закріплених на рухомій платформі 1 з можливістю взаємодії через пружні елементи (не показані) з імітатором кабіни льотного екіпажу 7 в зоні розташування правого і лівого шасі (фіг. 1, 2). Електромагніти за допомогою шини (не позначена) зв'язані з програмним комплексом 38 керування тренажером і виконані з можливістю реалізації ударного акселераційного впливу на імітатор кабіни льотного екіпажу 7, сила якого адекватна модельованій вертикальній швидкості вертольота у момент торкання одним або двома шасі твердої поверхні. Живлення електромагнітів здійснюють від блока живлення (БЖ) з джерелом постійної напруги 24В (фіг. 11). Моделювання сили ударної дії електромагнітів на імітатор кабіни льотного екіпажу 7 залежно від вертикальної швидкості посадки і їх розташування в зоні правого і лівого шасі створюють у членів екіпажу достовірне акселераційне відчуття торкання стойками шасі посадочної поверхні, що ініціює необхідність виконання подальших керуючих дій, пов'язаних з посадкою. Таким чином введення імітатора акселераційного впливу 5 дозволяє сформувати у членів екіпажу упевнені навики керування вертольотом при посадці. Представлене на фігурах креслень і в описі конструктивне виконання системи не вичерпує всіх можливих варіантів її виконання, що забезпечують досягнення заявленого технічного результату. Наприклад, дана система без істотних витрат може бути адаптована на тренажери літаків різних типів і призначення. При цьому, залежно від конструкції імітаторів кабіни льотного екіпажу, на цих тренажерах може бути реалізовано інше взаємне розташування імітаторів високочастотних і низькочастотних вібраційних коливань і імітатора акселераційного впливу, а також інше їх розміщення на рухомій і нерухомій платформах. Робота система здійснюється таким чином. Настройка системи. Заздалегідь в програмному комплексі 38 керування тренажером і блоці керування і контролю 37 формують взаємозв'язок математичних моделей режимів польоту заданого типу вертольота з керуючими командами на реалізацію відповідних характеристик вібраційних і акселераційних дій на імітатор кабіни льотного екіпажу 7. При цьому блок керування і контролю 37 зв'язаний з електроприводом 20 за допомогою низькочастотного каналу 46 і широкоімпульсного модулятора низькочастотних коливань 47, з вібромотором імітатора високочастотних вібраційних коливань 3 - за допомогою високочастотного каналу 48 і широкоімпульсного модулятора високочастотних коливань 49, а з лінійним актуатором 32 - за 5 UA 103447 U 5 10 15 20 25 30 35 40 45 50 55 60 допомогою каналу 50. Програмний комплекс 38 керування тренажером зв'язаний з електромагнітами імітатора акселераційного впливу 5 за допомогою модулятора 51. Після цього виконують настройку частотних характеристик імітатора високочастотних 3 вібраційних коливань і частотно-амплітудних характеристик імітатора низькочастотних 4 коливань, а також силової характеристики імітатора акселераційного впливу 5, забезпечуючи достатній рівень їх адекватності характеристикам заданого типу вертольота і відповідним режимами його експлуатації при виконанні учбово-тренувальних задач. Для цього раму 8 встановлюють під заданим кутом до площини рухомої опори 1 і фіксують в такому положенні за допомогою кронштейнів 11, що містять прорізи радіусів, і болтових з'єднань 12. Далі за допомогою лінійного актуатора 32 виконують настройку інтервалу робочих положень великого ексцентрика 14 уздовж осі вертикального вала 17 і числа обертів електроприводу 20. Після цього настроюють оберти вібромотора (вібродвигуна) - імітатора високочастотних вібраційних коливань 3, а потім величину напруги, що подається на електромагніти імітатора акселераційного впливу 5 залежно від вертикальної швидкості вертольота при посадці. Далі в блоці керування і контролю 37 формують інтервали керуюючих дій для імітатора високочастотних вібраційних коливань 3 і імітатора низькочастотних вібраційних коливань, що забезпечує реалізацію відповідних сигналів, які поступають від програмного комплексу 38 керування тренажером в процесі виконання учбово-тренувальних задач. Робота системи. На підставі керуючих команд від блока керування і контролю 37 електропривод 20 за допомогою клинопасової передачі 19, шківа 20 і вертикального вала 17 розкручує великий ексцентрик 14. Обертальний рух великого ексцентрика 14 перетворюється у вібраційний вплив на імітатор кабіни льотного екіпажу 7. В результаті закріплення рами 8 під гострим кутом на рухомій платформі 1 вібраційний вплив передається на імітатор кабіни льотного екіпажу 7 по трьох ортогональних проекціях рівнодіючої цієї дії: уздовж осей X, У і Z. Одночасно з великим ексцентриком 14 електропривод 20 приводить в обертання малий ексцентрик 30, за рахунок дій балансувань якого виключається виникнення резонансних коливань в системі. При виконанні модельованих режимів польоту блок керування і контролю 37 змінює частоту обертання електроприводу 20, з'єднаного з великим 14 і малим 30 ексцентриками, і, відповідно, частоту низькочастотних вібраційних впливів на імітатор кабіни льотного екіпажу 7. Зміну амплітуди низькочастотних вібраційних впливів здійснюють за допомогою переміщень великого ексцентрика 14 уздовж вертикального вала 17 за допомогою лінійного актуатора 17 і корбовопоковзневого механізму відповідно до керуючих команд від блока керування і контролю 37. При цьому частоту обертання великого ексцентрика 14 контролюють на підставі показників оптичного енкодера 41, а положення лінійного актуатора 32 - показників датчика положення 39 і кінцевого вимикача 40. Блок керування і контролю 37 здійснює також керування режимами роботи вібромотора імітатора високочастотних вібраційних коливань 3 за допомогою зміни напруги на вході вібромотора (вібродвигуна). Керування роботою електромагнітів імітатора акселераційого впливу 5 здійснює програмний комплекс 38 керування тренажером. При відробці на тренажері режиму посадки електромагніти імітатора акселераційного впливу 5 через пружні елементи відтворюють короткочасну ударну дію на імітатора кабіни льотного екіпажу 7, сила якої пропорційна вертикальній швидкості вертольота у момент торкання шасі твердої поверхні. При цьому, залежно від умов виконання пілотом посадки, акселераційний вплив відтворюватися одним (правим або лівим) або одночасно двома шасі. Система вібраційного і акселераційного впливу, що заявляється, пройшла випробування на комплексному тренажері вертольота класу FTD/УЛТ-З на відповідність характеристикам реального вертольота МІ-8МСБ, МІ-8Т, Мі-171 і МІ-8МТВ, в різних режимах його експлуатації. За наслідками випробувань і суб'єктивних оцінок пілотів на комплексному тренажері цього типу вертольота реалізовані наступні параметри вібраційного впливу на імітатор кабіни льотного екіпажу 7: - при номінальному режимі роботи двигунів з обертами несучого гвинта 93,5 % імітатор низькочастотних вібраційних коливань 4 впливає на імітатор кабіни льотного екіпажу 7 з постійною частотою 192 Гц і амплітудою від 1 до 3 мм, прагнучої до нуля; - при перехідному режимі, зв'язаному з набором приладової швидкості польоту в інтервалі від 50 км/година до 65 км/година (нетривалий режим переходу "на косий обдув"), імітатор високочастотних вібраційних коливань 3 короткочасно включається при швидкості 50 км/година і впливає на імітатор кабіни льотного екіпажу 7 з частотою до 2,0 кГц і амплітудою до 5 мм, а після перевищення приладової швидкості 65 км/година різко вимикається; 6 UA 103447 U 510 15 20 - при перехідному режимі польоту, зв'язаному з перевищенням максимальної приладової швидкості в інтервалі від 250 км/година до 270 км/година (ефект "зриву потоку з лопатей"), імітатор високочастотних вібраційних коливань 3 короткочасно включається і впливає на імітатор кабіни льотного екіпажу 7 з плавним наростанням частоти до 2,0 кГц і амплітуди до 4-5 мм При перевищенні приладової швидкості польоту значення 270 км/година імітатор вимикається. Моделювання акселераційного впливу на імітатор кабіни льотного екіпажу 7 програмний комплекс 38 керування тренажером здійснює для умов посадки вертольота Мі-8 масою 12т в інтервалі вертикальної швидкості від 0,1 м/с до 2,5 м/с. При вертикальній швидкості вертольота у момент торкання твердої поверхні більше 2,5 м/с моделюється посадка з руйнуванням шасі. Зменшення на 1,0 м/с граничній вертикальній швидкості посадки на тренажері в порівнянні з відповідною нормою керівництва по льотній експлуатації вертольота Мі-8, що приводить до руйнування шасі, встановлено спеціально з метою вироблення у пілотів в процесі занять стійких акселераційних відчуттів, направлених на виконання посадки з гарантований безпечною швидкістю у момент торкання шасі твердої поверхні. Результати випробувань підтвердили високий рівень адекватності характеристик, реалізованих системою вібраційного і акселераційного впливу на тренажерах вертольотів, при забезпеченні високої надійності системи і порівняно невисокої її вартості і витратах на експлуатацію. Система без істотних витрат може бути адаптована на тренажери вертольотів і літаків різних типів і призначення. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 55 60 1. Система вібраційного і акселераційного впливу на імітатор кабіни льотного екіпажу тренажера повітряного транспортного засобу, що містить рухому платформу із змонтованими на ній технічними засобами для вібраційного впливу і блок керування і контролю згаданими засобами, виконані з можливістю реалізації вібраційного впливу уздовж поперечної, подовжньої і вертикальної осей імітатора кабіни льотного екіпажу, модельованих програмним комплексом керування тренажером, яка відрізняється тим, що вона містить нерухому платформу і технічні засоби для акселераційного впливу на імітатор кабіни льотного екіпажу, що імітує торкання шасі твердої поверхні в режимі посадки, технічні засоби для вібраційного впливу виконані у вигляді імітаторів високочастотних і низькочастотних вібраційних коливань, імітатор високочастотних вібраційних коливань виконаний у вигляді вібромотора, імітатор низькочастотних вібраційних коливань виконаний у вигляді змонтованих на рамі каркасної конструкції двох взаємозв'язаних за допомогою загального електроприводу ексцентрикових механізмів, один з яких виконаний з можливістю збудження коливань низької частоти і додатково кінематично зв'язаний з лінійним актуатором, а другий виконаний з можливістю збудження коливань накладеної частоти балансування, технічні засоби для акселераційного впливу виконані у вигляді електромагнітів, закріплених на рухомій платформі, при цьому рухома платформа змонтована на нерухомій платформі за допомогою гасителів вібраційних коливань, рама з імітатором низькочастотних вібраційних коливань закріплена на рухомій платформі під гострим кутом щодо її подовжньої осі з можливістю зміни величини цього кута, а електромагніти виконані з можливістю з'єднання з програмним комплексом керування тренажером. 2. Система за п. 1, яка відрізняється тим, що імітатор високочастотних вібраційних коливань закріплений уздовж подовжньої осі рухомої платформи, а рама з імітатором низькочастотних вібраційних коливань розташована таким чином, що напрям рівнодіючої вібраційних сил низької частоти співпадає з центром мас імітатора кабіни льотного екіпажу. 3. Система за п. 1, яка відрізняється тим, що електромагніти змонтовані на рухомій платформі з можливістю акселераційного впливу на імітатор кабіни льотного екіпажу через пружні елементи. 4. Система за п. 1, яка відрізняється тим, що ексцентриковий механізм для збудження коливань низької частоти виконаний у вигляді великого ексцентрика, з'єднаного кінематично з верхньою частиною вертикального вала, нижня частина якого за допомогою клинопасової передачі і шківа з'єднана з електроприводом, ексцентриковий механізм для збудження коливань накладеної частоти балансування виконаний у вигляді кутового редуктора, вхідний вал якого за допомогою клинопасової передачі і шківа з'єднаний із згаданим електроприводом, а вихідний вал за допомогою еластичної муфти з'єднаний з валом, на якому закріплений малий ексцентрик, а лінійний актуатор кінематично зв'язаний з великим ексцентриком за допомогою корбово-поковзневого механізму, виконаного у вигляді повзуна, закріпленого в середній частині вертикального вала з можливістю зворотно-поступального переміщення уздовж нього, тяги для 7 UA 103447 U 5 кінематичного з'єднання верхньої частини повзуна з великим ексцентриком і кронштейна для з'єднання нижньої частини повзуна з лінійним актуатором. 5. Система за п. 1, яка відрізняється тим, що лінійний актуатор виконаний з датчиком контролю положення і кінцевим вимикачем, ексцентриковий механізм для збудження коливань низької частоти виконаний з оптичним енкодером, а блок керування і контролю імітаторами високочастотних і низькочастотних вібраційних коливань зв'язаний із згаданими засобами контролю. 8 UA 103447 U 9 UA 103447 U 10 UA 103447 U 11 UA 103447 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Назва патенту англійськоюThe system of vibration and acceleration impact on the simulator flight deck simulator air vehicle
Автори англійськоюKozenko Oleksandr Iuriyovych, Zherdev Mykhailo Fedorovych, Ivanov Denys Serhiyovych
Назва патенту російськоюСистема вибрационного и акселерационного влияния на имитатор кабины летного экипажа тренажера воздушного транспортного средства
Автори російськоюКозенко Александр Юрьевич, Жердев Михаил Федорович, Иванов Денис Сергеевич
МПК / Мітки
Мітки: транспортного, тренажера, екіпажу, кабіни, імітатор, повітряного, вібраційного, впливу, льотного, засобу, система, акселераційного
Код посилання
<a href="https://ua.patents.su/14-103447-sistema-vibracijjnogo-i-akseleracijjnogo-vplivu-na-imitator-kabini-lotnogo-ekipazhu-trenazhera-povitryanogo-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Система вібраційного і акселераційного впливу на імітатор кабіни льотного екіпажу тренажера повітряного транспортного засобу</a>
Спеціалізований тренажер функціональної системи транспортного засобу, зокрема, кабіни екіпажу вертольота
Номер патенту: 34051
Опубліковано: 25.07.2008
Автори: Моцарь Юрій Анатолійович, Сененко Руслан Григорович, Тупіков Костянтин Сергійович, Матюха Володимир Михайлович, Моцарь Анатолій Іванович, Барвінок Дмитро Володимирович, Коваль Дмитро Орестович, Моцарь Валерій Анатолійович, Зінченко Володимир Павлович, Моцар Петро Іванович
МПК: G09B 9/00
Мітки: кабіни, спеціалізований, вертольота, транспортного, засобу, зокрема, системі, екіпажу, функціонально, тренажер
Формула / Реферат:
1. Спеціалізований тренажер функціональної системи транспортного засобу, зокрема, кабіни екіпажу вертольота, виконаний у вигляді стенда, на якому розміщені блок демонстраційних елементів і панель керування тренажером, що з'єднані між собою і виконані з можливістю імітації експлуатаційних режимів роботи функціональної системи, який відрізняється тим, що на стенді додатково розміщений процесорний блок і блок живлення, блок демонстраційних...
Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів
Номер патенту: 56086
Опубліковано: 15.04.2003
Автори: Хитрик Василь Онуфрійович, Медвідь Володимир Станіславович, Богомол Володимир Іванович
МПК: G09B 9/02
Мітки: засобів, транспортних, кабіни, імітатор, динаміки, навчання, водінню, тренажера
Формула / Реферат:
1. Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів, що містить дві платформи, зв'язані між собою за допомогою не менше ніж двох виконавчих гідроциліндрів та двох демпферів, одна з яких виконана рухомою,а друга -нерухомою, та кабіну транспортного засобу з розташованими у ній імітаторами приладової дошки, важелями керування, перископічними приладами спостереження, динаміком, люком і робочим місцем навчаного, при...
Система забезпечення безпеки екіпажу повітряного пункту керування
Номер патенту: 15944
Опубліковано: 17.07.2006
Автори: Куровська Тетяна Юріївна, Соколовський Володимир Анатолійович, Слєпов Лев Іванович
МПК: A62B 37/00
Мітки: екіпажу, забезпечення, пункту, повітряного, безпеки, керування, система
Формула / Реферат:
Система забезпечення безпеки екіпажу повітряного пункту керування, що містить індивідуальний парашут кожного члена екіпажу, яка відрізняється тим, що до нього запроваджено металевий контейнер, в якому розміщено пристрій керування, парашутна група, балони стислого повітря, робочі місця екіпажу повітряного пункту керування, катапульта і гальмівні реактивні двигуни, при цьому робочі місця екіпажу повітряного пункту керування з'єднані з пристроєм...
Пристрій для установлення кабіни на рамі транспортного засобу
Номер патенту: 15679
Опубліковано: 17.07.2006
Автори: Чурбанов Павло Вікторович, Мілакова Олена Володимирівна
МПК: B62D 33/06
Мітки: рами, установлення, кабіни, транспортного, пристрій, засобу
Формула / Реферат:
Пристрій для установлення кабіни на рамі транспортного засобу, в якому кронштейн рами транспортного засобу і кронштейн кабіни, між якими встановлена еластична прокладка, з'єднані за допомогою встановлювального болта, що взаємодіє головкою з упорною шайбою, встановленою на пружному буфері, який розміщено в стакані, закріпленому на кронштейні кабіни, який відрізняється тим, що пристрій обладнано нижнім стаканом, закріпленим на кронштейні рами...
Охолодник для кабіни транспортного засобу

Номер патенту: 445
Опубліковано: 12.11.1999
Автор: Давлеткулов Володимир Галим'янович
МПК: B60H 1/32
Мітки: транспортного, охолодник, кабіни, засобу
Формула / Реферат:
Охолодник для кабіни транспортного засобу, який містить випарник, розміщений на даху транспортного засобу, сонячний екран з регулюючими затулками, встановлений на певній відстані над дахом транспортного засобу і який утворює з дахом повітровід, та посудину з водою, який відрізняється тим, що як випарник використовують тканину, повітровід з боків закритий сонячним екраном, з'єднаним з дахом наглухо, а ззаду і спереду регулюючими затулками,...
Попередній патент: Пристрій аутентифікації захисної мітки, що містить люмінофор
Наступний патент: Система вібраційного впливу на імітатор кабіни льотного екіпажу тренажера повітряного транспортного засобу
Випадковий патент: Спосіб одержання зносостійких покриттів на вентильних металах