Безпровідний пристрій зв’язку для системи зв’язку cdma
Формула / Реферат
1. Безпровідний пристрій зв'язку для системи зв'язку CDMA, який містить передавальну схему,
блок регулювання потужності, зв'язаний з передавальною схемою, причому блок регулювання потужності виконаний з можливістю регулювання рівня підсилення передавальної схеми, і
блок керування потужністю у замкнутому контурі, який відрізняється тим, що містить
мультиплексор і
блок регулювання відновлення виклику,
причому сигнал з виходу блока керування потужністю у замкнутому контурі надходить на блок регулювання потужності через мультиплексор після скасування сигналу завершення передачі обслуговування, який здійснює керування мультиплексором, зв'язаним також з блоком регулювання відновлення виклику, призначеним для генерування заданої команди керування потужністю і виконаним з можливістю функціонування при надходженні на нього сигналу завершення передачі обслуговування.
2. Пристрій за п. 1, який відрізняється тим, що задана команда керування потужністю основана на рівні потужності передачі перед відновленням виклику.
Текст
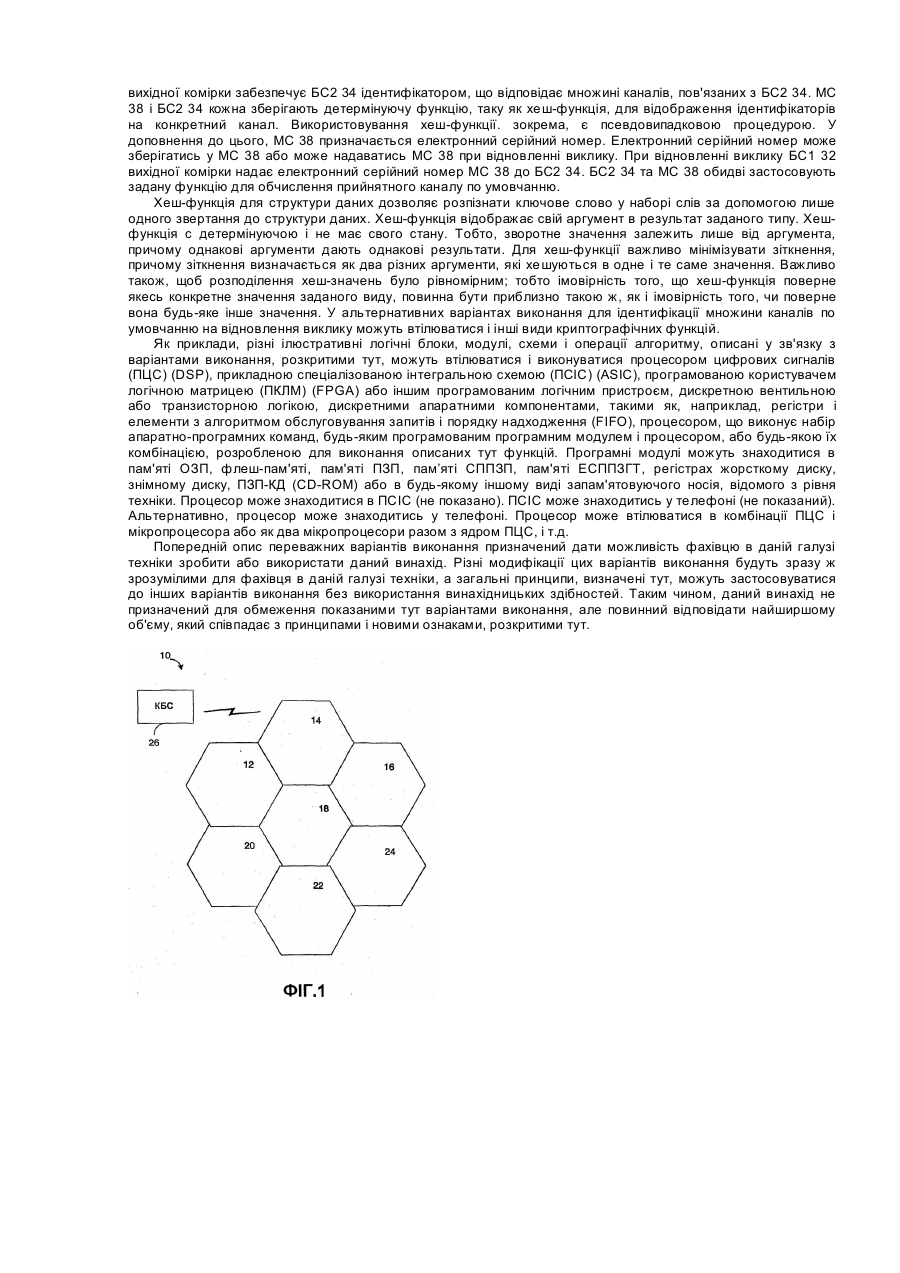
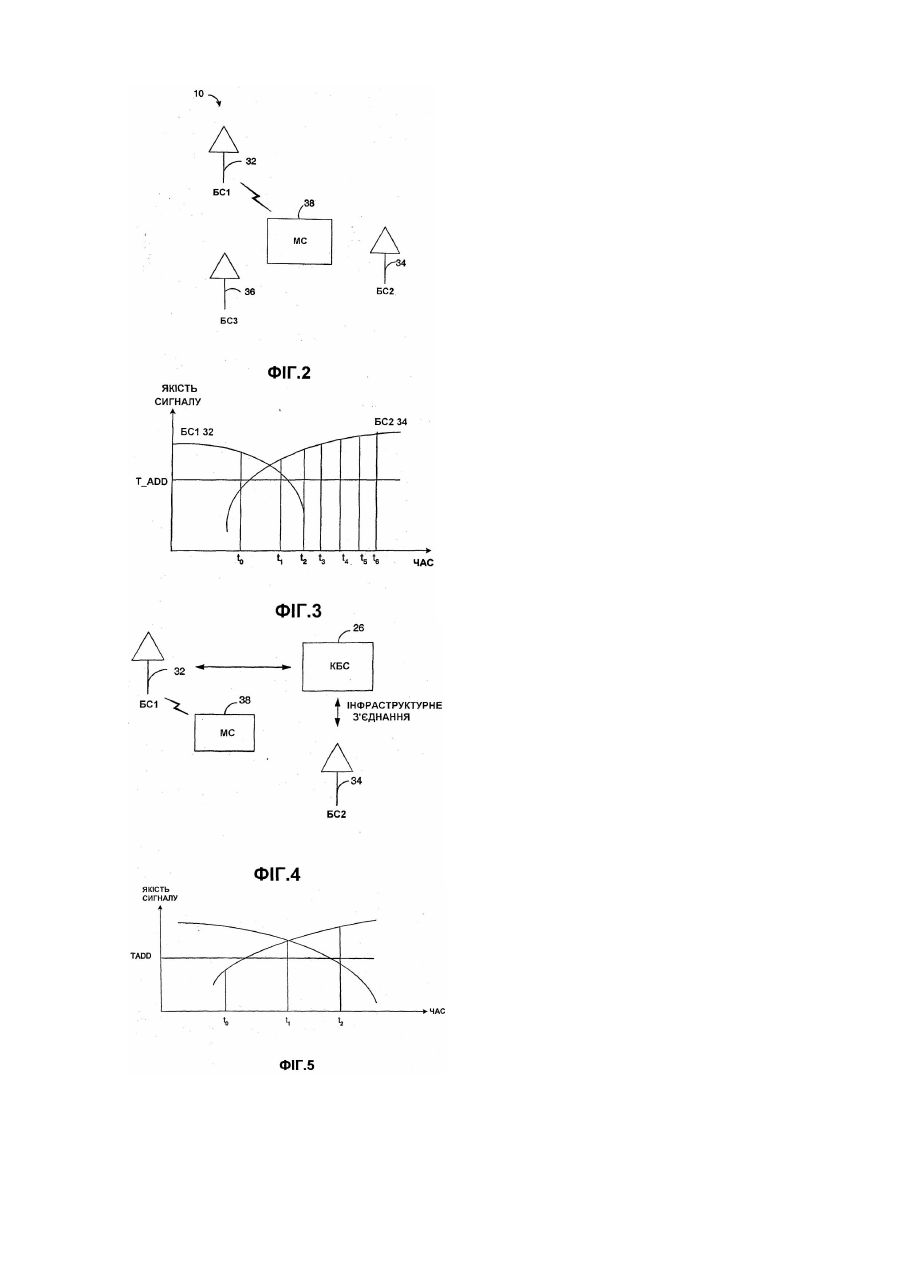
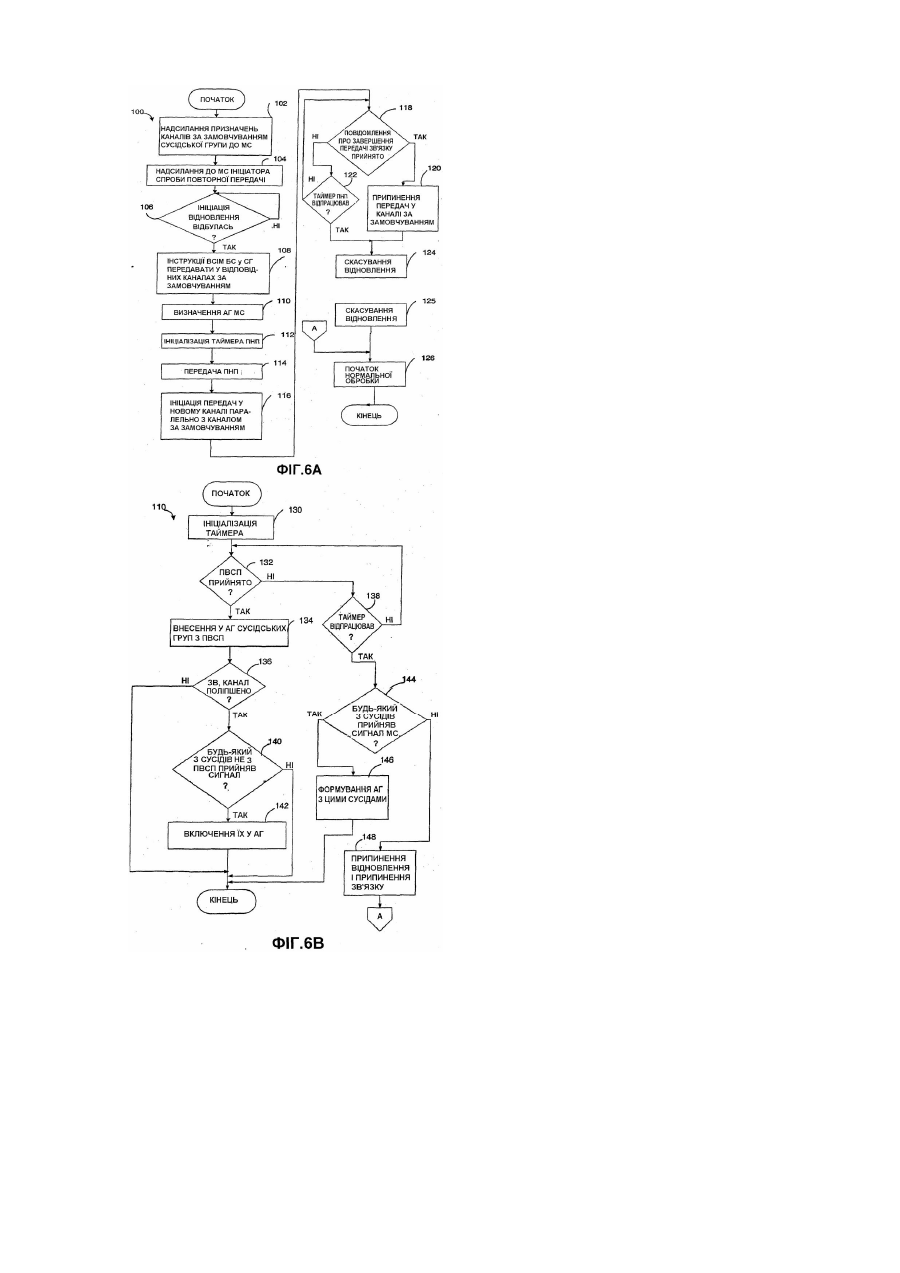
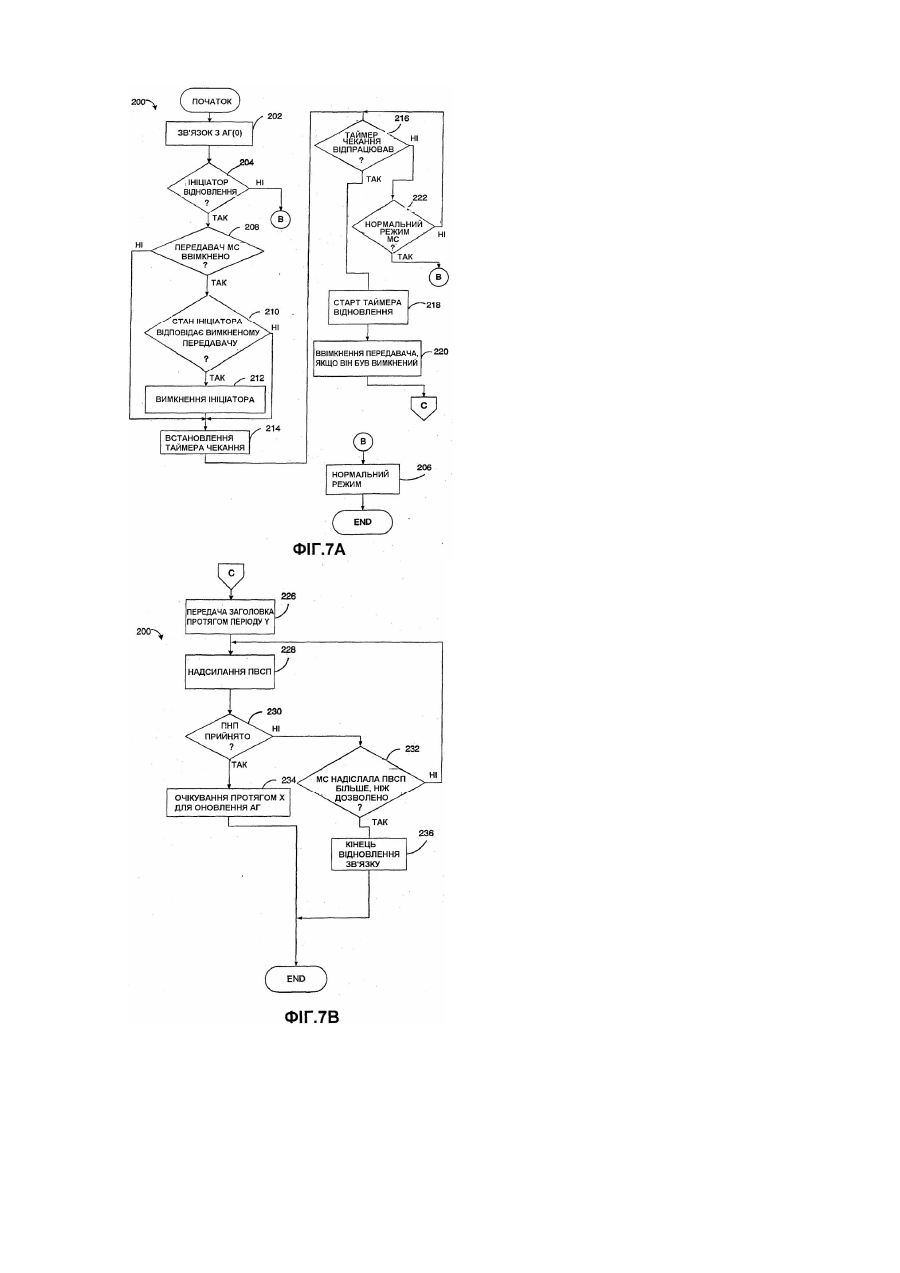
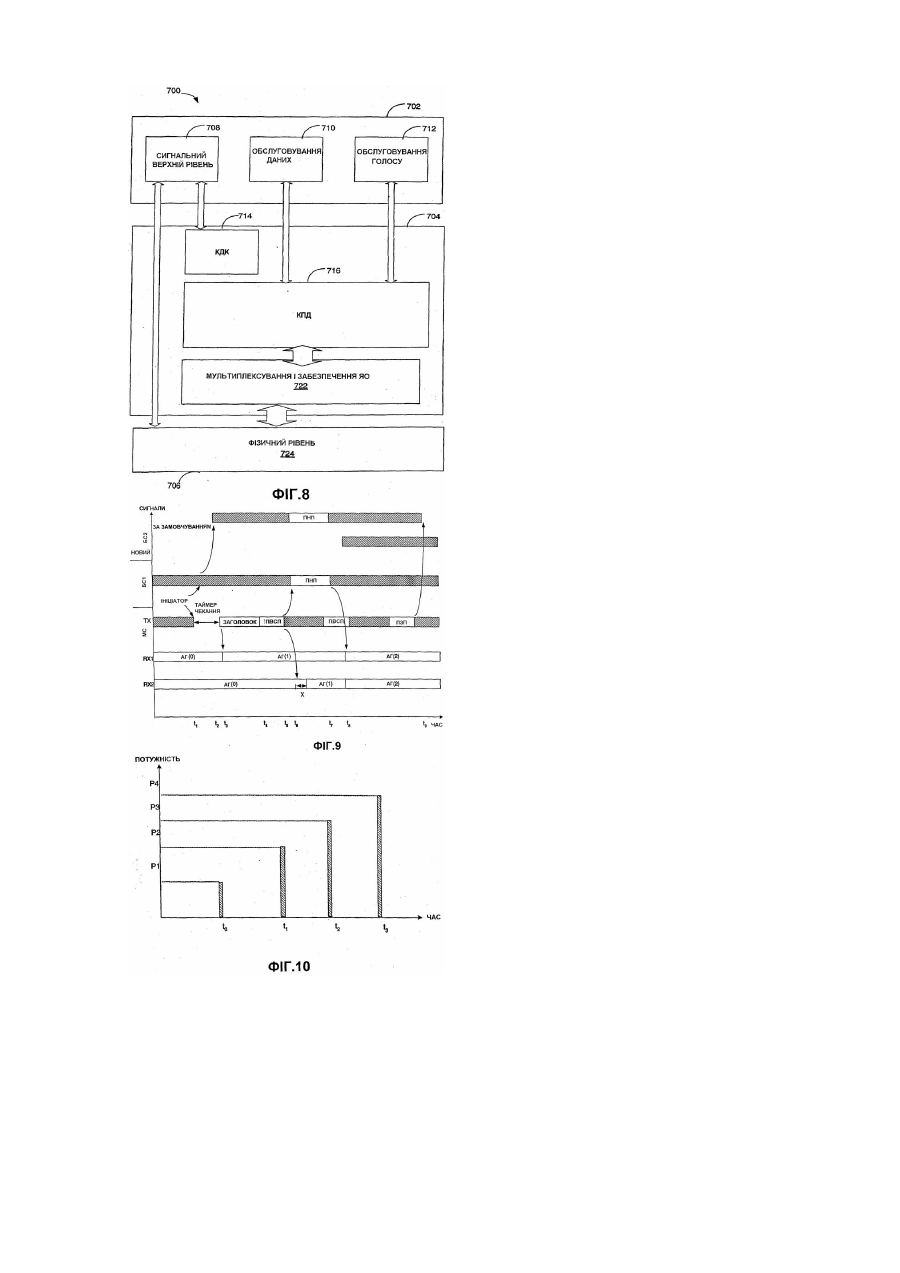
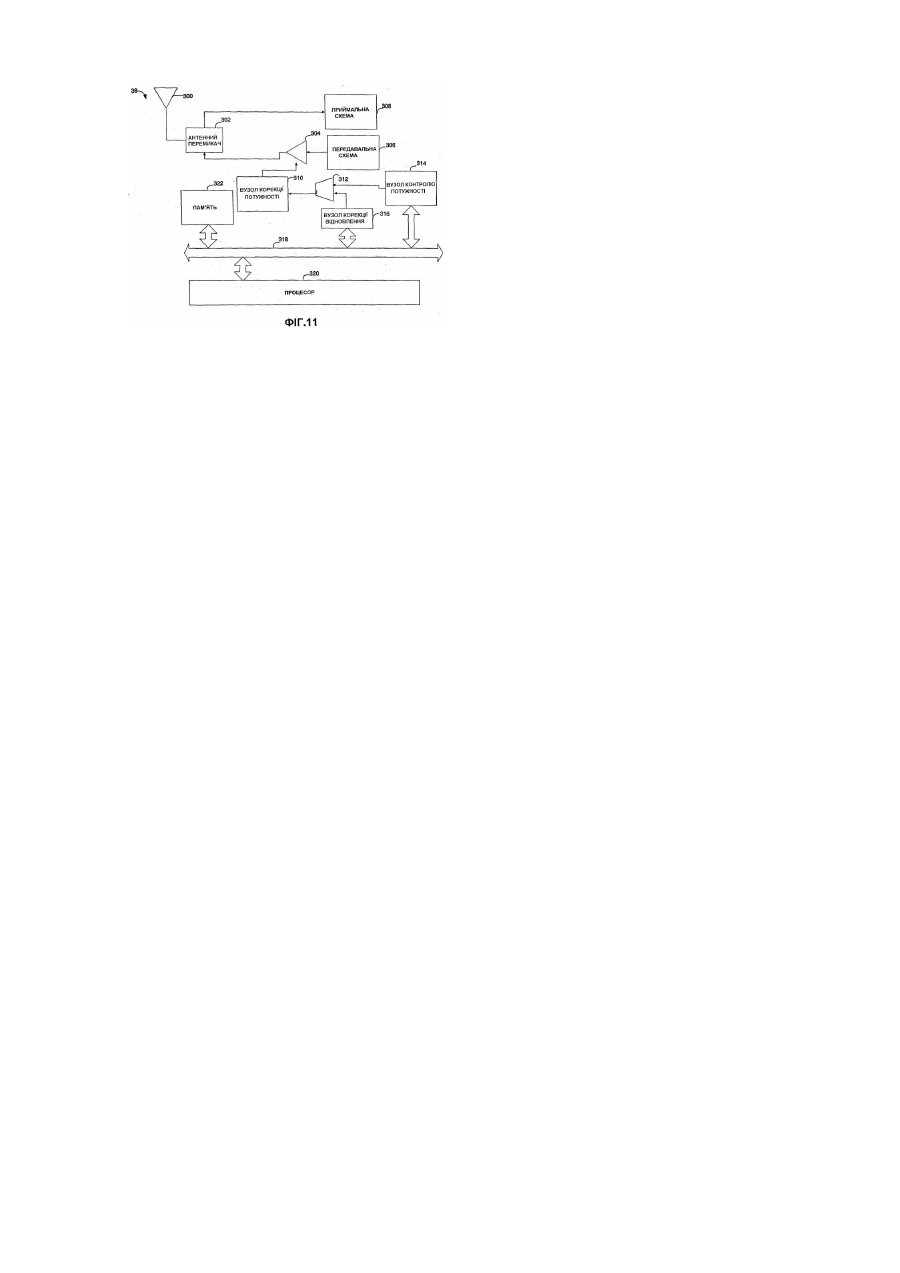
Винахід відноситься до безпровідної передачі мови і даних. Зокрема, даний винахід відноситься до нового і удосконаленого способу і пристрою для відновлення виклику у системі безпровідного зв'язку. Система безпровідного зв'язку звичайно включає в себе множину базових станцій (БС) (BS), кожна з яких зв'язана з коміркою і/або сектором, який здійснює зв'язок з множиною мобільних станцій (МС) (MS). Базові станції керуються контролером базової станції (КБС) (BSC). Оскільки мобільна станція переміщується через систему, якість сигналів, прийнятих від базових станцій, флюктуює. Коли лінія зв'язку між базовою станцією і заданою мобільною станцією погіршується, можна запобігти втраті зв'язку встановленням лінії зв'язку щонайменше з ще однією базовою станцією. Для ініціювання такої альтернативної лінії(й) зв'язку передбачений процес передачі обслуговування. В ситуації передачі обслуговування інфраструктура здійснює узгодження з різними базовими станціями і цією мобільною стацією. Однак, часто якість сигналу погіршується надто швидко для проведення такого узгодження. Отже, існує потреба у способі і пристрої для відновлення виклику в різних ситуаціях. Крім того, існує потреба у надійному способі відновлення виклику у системі безпровідного зв'язку. Розкриті варіанти виконання пропонують новий і удосконалений спосіб відновлення викликів у системі безпровідного зв'язку. Згідно з одним з аспектів, спосіб у системі безпровідного зв’язку з множиною базових станцій, кожна з яких має набір сусідів, що містить сусідні базові станції, причому кожна з сусідніх базових станцій має канал по умовчанню, полягає в тому, що передають інформацію каналу по умовчанню на мобільну станцію; виявляють випадок, який запускає відновлення виклику; і дають команду всім базовим станціям в наборі сусідів здійснювати передачу по відповідних каналах по умовчанню. В одному аспекті безпровідний пристрій включає в себе антену; зв'язаний з антеною процесор; передавальну схему, зв'язану з антеною і процесором; приймальну схему, зв'язану з антеною і процесором; перший набір машиночитаних команд, який виконується процесором, для прийому переліку сусідів базової станції, причому цей перелік включає в себе призначення каналів по умовчанню для кожного з сусідів; другий набір машиночитаних команд, який виконується процесором, для ідентифікації випадку, що запускає відновлення виклику, і блокування у відповідь передавальної схеми; і третій набір машиночитаних команд, який виконується процесором, для встановлення передачі обслуговування щонайменше одним з сусідів. Згідно з іншим аспектом, безпровідний пристрій включає в себе передавальну схему; блок регулювання відновлення, виконаний з можливістю функціонування після операції відновлення виклику, для генерування заданої команди керування потужністю; і блок регулювання потужності, зв'язаний з блоком регулювання відновлення і передавальною схемою, причому блок регулювання потужності виконаний з можливістю регулювання передавальної схеми у відповідь на команду керування потужністю. Згідно з ще одним аспектом комп'ютерна програма втілюється на машиночитаному носії, що містить машиночитані команди, причому ця програма включає в себе перший набір команд, виконуваних для ідентифікації спеціальної події; другий набір команд, виконуваних для заборони відновлення виклику під час спеціальної події; і третій набір команд, виконуваних для сповіщення системи безпровідного зв'язку про спеціальну подію. Ознаки, задачі і переваги розкривного способу та пристрою стануть зрозумілі з детального викладеного нижче опису, що розглядається разом з кресленнями, на яких однакові посилальні позиції вказуються відповідно по всьому опису і на яких: Фіг.1 ілюструє у вигляді блок-схеми систему безпровідного зв'язку згідно з одним з варіантів виконання; Фіг.2 ілюструє у вигляді блок-схеми частину системи безпровідного зв'язку за Фіг.1 згідно з одним з варіантів виконання; Фіг.3 ілюструє у вигляді часової діаграми якість сигналів двох базових станцій у безпровідній системі за Фіг.2 згідно з одним з варіантів виконання; Фіг.4 ілюструє у вигляді блок-схеми частину системи безпровідного зв'язку за Фіг.1 під час відновлення згідно з одним з варіантів виконання; Фіг.5 ілюструє у вигляді часової діаграми якість сигналів двох базових станцій у системі безпровідного зв'язку згідно з одним з варіантів виконання; Фіг.6А і 6В ілюструє у вигляді блок-схеми алгоритму спосіб відновлення виклику на базовій станції згідно з одним з варіантів виконання; Фіг.7А і 7В ілюструє у вигляді блок-схеми алгоритму спосіб відновлення виклику на мобільній станції згідно з одним з варіантів виконання; Фіг.8 ілюструє у вигляді блок-схеми рівні архітектури в системі за Фіг.1 згідно з одним з варіантів виконання; Фіг.9 ілюструє у вигляді часової діаграми операцію відновлення виклику у системі за Фіг.1 згідно з одним з варіантів виконання; Фіг.10 ілюструє у вигляді часової діаграми ініціювання рівня потужності передачі в мобільній станції після відновлення виклику згідно з одним з варіантів виконання винаходу; Фіг.11 ілюструє у вигляді блок-схеми роботу безпровідного пристрою у системі за Фіг.1. Спосіб відновлення виклику у безпровідній системі зв'язку згідно з одним з варіантів виконання забезпечує інформацію, що стосується сусідніх комірок і/або секторів, які доступні і здатні відновити виклик для мобільної станції, яка знаходиться у стані потенційного ризику втрати лінії зв'язку. Кожна з базових станцій, здатних відновити виклик, має прямий канал по умовчанню для відновлення виклику, ідентифікований заданим кодом. В іншому варіанті виконання на одного сусіда призначаються більше одного прямого по умовчанню каналу для відновлення виклику, а мобільна станція використовує хеш-функцію з МІМС (міжнародна ідентифікація мобільних станцій) (IMSI), ЧМШС (часовою міжнародною ідентифікацією мобільних станцій) (TIMSI), ЕСН (електронним серійним номером) (ESN), системним часом або їх комбінацією, щоб визначено вирішити, які канали використовувати для прийому передачі від кожної базової станції, що здатна відновити виклик. Після цього мобільна станція використовує цей канал для прийому сигналів від відновлювальної базової станції. Мобільній станції може бути надана команда об'єднати підканали керування потужністю від множини сусідніх відновлювальних базових станцій шляхом службових повідомлень, коли мобільна станція звертається до базової станції. Це може також відбуватися, коли мобільна станція переміщується у зону охоплення базової станції в той час, як мобільна станція перебуває у незайнятому стані (стан очікування), тобто без постійних ліній зв'язку, шляхом повідомлень по каналах трафіку при ініціюванні виклику або при передачі обслуговування, коли для мобільної станції змінюється активний набір. Фіг.1 ілюструє систему 10 безпровідного зв'язку, яка має множину комірок 12, 14, 16, 18, 20, 22, 24. Комірки 12, 14, 16, 18, 20, 22, 24 здійснюють зв'язок з КБС 26 через ефірний радіоінтерфейс. Кожна з комірок 12, 14, 16, 18, 20, 22, 24 має відповідний набір сусідів, складений з комірок у географічному сусідстві і/або сусідстві по передачі. Наприклад, комірка 18 має набір сусідів, що включає в себе комірки 12, 14, 16, 20, 22, 24. У системах передачі з розширеним спектром, таких як система множинного доступу з кодовим розділенням каналів (МДКР) (CDMA), визначеної стандартом "Стандартом сумісності мобільної станції - базової станції TIA/EІA/IS95 для дворежимної широкосмугової стільникової системи з розширеним спектром", що називається тут і далі "стандарт IS-95". або "Стандартами TIA/EIA/ІS-95 для систем МДКР2000 з розширеним спектром", що називається тут далі "стандарт CDMA2000", сигнали з розширеним спектром займають одну і ту ж канальну смугу частот, причому кожний сигнал має власну відмінну псевдошумову (ПШ) (PN) послідовність. Робота системи МДКР описана у [патенті США 4901307, озаглавленому "Система зв'язку множинного доступу з розширеним спектром, яка використовує супутникові або наземні повторювачі", а також 5103459, озаглавленому "Система і спосіб генерування коливань у стільниковій телефонній системі МДКР"], права на які належать заявнику даної заявки на патент і які спеціально включені у цей опис посиланням. При цьому множина користувачів передають повідомлення одночасно в одній і тій самій канальній смузі частот. Фіг.2 ілюструє частину системи 10 за Фіг.1, що включає в себе базову станцію 32, помічену БС1, що здійснює зв’язок з МС 38. БС1 знаходиться в комірці 18 за Фіг.1. Дві інші базові станції 34, 36, помічені як БС2 та БС3 відповідно, знаходяться у комірках 16, 24 відповідно. Ефірний радіоінтерфейс забезпечує середовище для прямої лінії зв'язку (ПЛЗ) (FL) для передач від БС1 32 до МС 38, і зворотної лінії зв'язку (ЗЛЗ) від М 38 до БС1 32. Зазначимо, що МС 38 може переміщатися у системі 10 так, що якість сигналу до БС1 32 і від неї погіршується. Щоб почати виклик МС 38 надсилає передачі по каналу доступу. БС1 32, БС2 34 і БС3 36 надсилають повідомлення про призначення каналів по пейджинговому каналу. Призначення каналів ідентифікує показник кодів Уолша для кожної базової станції. Якість сигналів у загальному випадку виміряють як відношення сигнал-шум (ВСШ) (SNR) і може бути виражене як енергія пілот-сигналу на елементарний сигнал до всієї прийнятої щільності потужності (Ес/І 0). Фіг.3 ілюструє графік якості сигналу, виміряної на МС 38 для БС1 32 і БС2 34. Якість сигналу для БС2 34 починає збільшуватися у момент t0 і продовжує збільшуватись над пороговим рівнем, поміченим як П_ДОД, після моменту t1. Пороговий рівень П_ДОД забезпечує якість опорного сигналу, вище якого МС 38 надається команда про повідомлення базової станції про необхідність додати базову станцію до її активного набору (AH) (AS). AH складений з базових станцій, які здійснюють активний зв’язок з МС 38 як на передачу, так і на прийом. АН звичайно вибирається з базових станцій, які є в кандидатському наборі (КН) (CS). КН включає в себе базові станції, які є кандидатами на встановлення активного зв'язку з МС 38. КН звичайно вибирається з базової станції в наборі сусідів (НС) (NS). На Фіг.3, в той час, як покращується якість сигналу від БС2 34, якість сигналу від БС1 32 знижується. Збільшення рівня енергії сигналів, прийнятих від БС2 34 додається до погіршення сигналів від БС1 32, так як якість сигналів для заданої базової станції є порівнянням енергії сигналу від цієї базової станції з усіма іншими наявними сигналами. У момент t1 МС 38 вимірює енергію сигналу від БС2 34, яка перевищує П_ДОД. Це вказує мобільній станції 38 на необхідність належних дій, тобто це є випадком запуску передачі обслуговування. У момент t2 МС 38 передає до БС1 32 і КБС 26 повідомлення вимірювання рівня пілотсигналу (ПВРП) (PSMM), яке містить інформацію вимірювання як для БС1 32, так і для БС2 34. У момент t3 КБС 26 встановлює лінію зв'язку від КБС 26 до БС2 34 і для МС 38. КБС 26 має селектор. КБС 26 встановлює лінію зв'язку "зворотної доставки" між БС1 32, БС2 34 і КБС 26 для МС 38. У момент t4 БС1 32 надсилає повідомлення про напрямок передачі обслуговування (ПНП) (HDM), яке містить інформацію, що ідентифікує БС1 32 і БС2 34 і їх зв'язані показники кодів для каналів прямої лінії зв'язку (ПЛЗ) від БС1 32 та БС2 34. Ця інформація дозволяє МС 38 приймати і демодулювати сигнали від БС1 32 і БС2 34. У момент t5 MC 38 приймає ПНП від БС1 32 і починає демодулювати сигнали від БС2 34 на додаток до сигналів від БС1 32. У даному прикладі є лише одна базова станція, залучена в передачу обслуговування. Однак може бути будь-яке число базових станцій, залучених в таку ситуацію передачі обслуговування, причому ці базові станції, що здійснюють зв'язок з МС 38, утворюють АН. Коли МС 38 приймає сигнали, що містять символи, від множини базових станцій в АН, МС 38 може об'єднувати ці сигнали, отримуючи сильніший сигнал. Процес об'єднування називають "м'яким об'єднуванням" ПЛЗ і він звичайно виконується при об'єднанні в оптимальному співвідношенні, тобто із зважуванням, на основі якості сигналу. У момент t6 МС 38 надсилає повідомлення для ПНП, прийняте від БС1 32, або повідомлення про завершення передачі обслуговування (ПЗП), яке вказує на успішне завершення передачі обслуговування. На Фіг.3 може виникнути ситуація, коли якість сигналу від БС2 34 зростає занадто швидко. У такому випадку сила сигналу БС2 34 відносно до рівня сигналу БС1 32 сприяє зниженню якості сигналу БС1 32. МС 38 утримується інфраструктурою від здійснення зв'язку до прийому інформації, необхідної для передачі обслуговування, такої як зсув псевдовипадкового шуму (ПШ) (PN), необхідний для ідентифікації БС2 34 або каналу, що використовує БС2 34 для МС 38. У звичайному процесі передачі обслуговування МДКР, коли мобільна станція з зони обслуговування однієї базової станції до зони обслуговування іншої базової станція переміщується із зони охоплення однієї базової станції, передача обслуговування відвертає втрату лінії зв'язку. В одному типі передачі обслуговування, а саме при м'якій передачі обслуговування, мобільна станція одночасно підтримує з'єднання з двома або більше базовими станціями. Поточне місцеположення мобільних станцій може розглядатись як вихідна (початкова) комірка, тоді як наступну комірку, в яку переміщується мобільна станція, можна назвати кінцевою коміркою. Мобільна станція використовує приймач типу гребінки (рейк-приймач) для демодуляції множини сигналів, прийнятих по ПЛЗ від множини базових станцій. Два сигнали об'єднуються і дають складений сигнал підвищеної якості. Хоча кожна з множини базових станцій, що беруть участь у м'якій передачі обслуговування, демодулює прийнятий сигнал окремо, кожна надсилає демодульовану і декодовану інформацію до КБС. КБС має селектор, який вибирає найкращий кадр серед множини прийнятих. Для множини умов і системних вимог можуть використовуватись і інші види передачі обслуговування. При передачі обслуговування за допомогою мобільної станції (ПОДМ) (МАНО) мобільна станція вимірює якість сигналу для пілот-сигналів ПЛЗ від множини мобільних станцій. Ця інформація надсилається до вихідної базової станції. Якості сигналів порівнюються для різних порогів для прийняття рішення щодо додання базових станцій до АН. Якщо якість сигналу заданого пілот-сигналу перевищує поріг П_ДОД виявлення пілот-сигналу, то цей пілот-сигнал додається до АН. У іншому варіанті виконання пілот-сигнал може спочатку додаватись до КН і потім до АН. Фактично, цей поріг дозволяє переносити стан базової станції з одного набору в інший. Відновлення виклику надає інформацію для мобільної станції заздалегідь, якщо узгодження передачі зв'язку не є можливим. Відновлення виклику ініціюється різними ситуаціями. При нормальній роботі мобільна станція і базова станція використовують запускаючі випадки для визначення їх відповідної роботи. Наприклад, мобільна станція системи 10 використовує множину порогів для прийняття рішення, що приймається з урахуванням того, яка інформація передається назад до базової станції. Один поріг, вже згаданий вище, П_ДОД, вказує якість сигналу для додання базової станції до АН. Коли мобільна станція одержує сигнал, який вимірюється над П_ДОД, ця мобільна станція переміщує дану базову станцію до КН, веде пошук цієї базової станції більш часто і доповідає про ці умови системі через свій відповідний АН. Інший поріг П_ВИКЛ надає рівень сигналу якості, нижче якого базова станція буде вилучена з АН. Коли мобільна станція приймає сигнал про те, який вимірюється нижче за П_ВИКЛ протягом часу, довшого за П_ТВИКЛ, мобільна станція доповідає про ці умови системі через існуючий АН. У кожному випадку базові станції в АН передають цю інформацію до контролера базової станції. Для відновлення виклику базової станції АН переглядає будь-які з множини можливих запускаючих випадків. Перший тип випадків, які запускають відновлення виклику, відбувається, коли якість сигналу ПЛЗ нижча порогового рівня протягом часу довше, ніж для іншого порогу. Цей вид запускаючих випадків включає в себе те, що коли базова станція приймає постійні запит керування потужністю (КП) (PC) від мобільної станції, щоб збільшити рівень передачі на базовій станції. Часто базова станція вже веде передачу на мобільну станцію на максимальному рівні граничної потужності. Наприклад, передача трафіку ПЛЗ підтримується на високому рівні протягом заданого часового інтервалу. Мобільна станція може надсилати численні запити підвищити потужність, тобто команди ВИЩЕ. Альтернативно, мобільна станція може доповісти про надлишок стирань. Стирання відбувається, коли більше число, ніж порогів рівень, бітів, приймається без впевненості у їх призначеному значенні. У іншому випадку мобільна станція передає повідомлення, які інформують базову станцію про те, що її установки зовнішнього контуру є високими або знаходяться на цих рівнях протягом більш тривалого часу. Другий тип запускаючого відновлення випадку відбувається, коли від мобільної станції очікується деяка відповідь, але не приймається ніяка відповідь або приймається інша відповідь. Цей тип запускаючих випадків включає в себе відсутність підтвердження від мобільної станції на відправлене базовою станцією повідомлення, яке вимагає підтвердження. Це повідомлення може бути передане задане число разів до того, як буде задовільна умова запускаючого випадку. Це число може бути фіксованим або перемінним або змінюваним по ефіру. Аналогічно, базова станція може приймати повторні повідомлення ЗЛЗ від мобільної станції, які вимагають підтвердження, причому ці повідомлення були прийняті після передачі підтвердження базовою станцією. Третій тип запускаючих випадків відноситься до низької якості зворотної лінії зв'язку, наприклад, коли частота кадрових помилок (ЧКП) (FER) в ЗЛЗ перевищує пороговий рівень. Альтернативно, ЗЛЗ може підтримуватись на високому рівні протягом заданого часового інтервалу. Але і інша ситуація може мати високу установку ЗЛЗ. Базова станція, яка має бути додана до АН, також має випадки, що запускають відновлення виклику, які ініціюють дію відновлення. Найважливішим запускаючим випадком є повідомлення від КБС про наявність потенційних проблем, пов'язаних з задачею мобільних станцій. У такому випадку базова станція починає пошук сигналів від цієї мобільної станції. Мобільна станція також може використовувати різні випадки, що запускають відновлення виклику, для входження у відновлення виклику. Перший тип запускаючих випадків відбувається, коли прийняті сигнали мають ненормальну кількість помилок. Наприклад, стирання ПЛЗ по рухомому вікні можуть перевищувати заданий пороговий рівень. В одному варіанті виконання цей пороговий рівень становить 12 послідовних кадрів, які зазнають стирання. У такому випадку мобільна станція може вимкнути передавальну частину мобільної станції і знову ввімкнути її, коли щонайменше два послідовні кадри ПЛЗ не матимуть стирань. Другий тип запускаючого відновлення випадку для мобільної станції відбувається, коли мобільна станція приймає від базової станції команди керування потужністю, які інструктують підвищити потужність. Базова станція може мати труднощі з прийомом сигналів ЗЛЗ внаслідок значних втрат в тракті від мобільної станції. Третій тип запускаючого відновлення випадку відбувається, коли одне або декілька повідомлень ЗЛЗ, які потребують підтвердження від базової станції, не підтверджуються. Це називається випадком, який запускає спробу повторної передачі. Аналогічно, може бути неправильна відповідь або може не бути відповіді від базової станції на повідомлення мобільної станції. Подібний же тип запускаючого випадку відбувається при прийомі повторених повідомлень ПЛЗ, які вимагають підтвердження, безпосередньо після фактичної передачі цього підтвердження від мобільної станції. Четвертий тип запускаючого відновлення випадку відбувається, коли мобільна станція веде передачу з високим рівнем протягом заданого часового інтервалу. При цьому передбачається, що ЗЛЗ не проходить до базової станції з достатньою енергією. У одному варіанті виконання втілюються гнучкі пороги для одного або множини різних випадків, що запускають відновлення виклику. Ці запускаючі відновлення виклику випадки можуть бути основані на множині спроб передачі у системі 10. Ці спроби часто виконуються на рівні ліній зв'язку між сигнальною і фізичною лінією зв'язку. Рівень ліній зв’язку називається рівнем 2 і він розглядається нижче відносно Фіг.8. У здатних до відновлення системах, таких як система 10 за Фіг.1, МС 38 виконує процедуру відновлення для підтримання виклику, коли лінія зв'язку, така як ПЛЗ, погіршується. Запускаючий випадок часто ініціює операцію відновлення, причому цей запускаючий випадок вказує, коли параметр або метрика переходить поріг. Ці пороги можуть бути динамічними, адаптованими до умов системи 10 і середовища. Подібним же чином пороги можуть регулюватися на основі історії або статистичного запису функціонування системи 10. У одному варіанті виконання число повторних передач по ЗЛЗ або час між стираннями, які йдуть одне за одним, або вимикання передавача в МС 38 можуть відбуватись у відповідь на команду, передану від інфраструктури системи 10, такої як БС 32 і/або КБС 26. У альтернативному варіанті виконання для конкретної дії визначається фіксований параметр, наприклад, максимальна кількість дозволених повторних передач. В іншому варіанті виконання умова і/або місцеположення мобільної станції задає запускаючий випадок. Близькість поточного рівня передачі МС 38 до заданого максимального значення може запускати відновлення виклику. Інші запускаючі випадки включають в себе якість ПЛ, виміряну стираннями передач у поточному АН, нестача внутрішньоконтурного керування потужністю, причому бажано для МС 38 ЗСШ відрізняється від того, яке надається внутрішнім контуром, тощо. Інші варіанти виконання можуть об'єднувати конкретний параметр і умови мобільної станції як запускаючого випадку. Інфраструктура системи 10 може надавати МС 38 інформацію операційного типу, яка корисна при визначенні порогів для запускаючи відновлення виклику випадків, і може використовувати таку інформацію для вибору фіксованих параметрів, наданих для МС 38, щоб використовувати їх як пороги запускаючого випадку. У одному варіанті виконання типове число повторних спроб викликом, які зазнають труднощі або виключені. Альтернативний варіант виконання використовує завантаження ЗЛЗ для встановлення і регулювання порогів Альтернативні варіанти виконання можуть використовувати місцеположення МС 38 у системі 10, таке як секторі заданої комірки. Інші ж варіанти виконання розглядають день тижня і/або час дня сумісно з відомими шаблонами мобільного трафіка. За потреби може бути використана комбінація будь-яких з цих механізмів. У системі 10 за Фіг.1 і 2 кожна БС 32, 34, 36 передає додаткову службову інформацію на мобільні станції, з якими вона здійснює зв'язок. Ця додаткова службова інформація для кожної БС 32, 34, 36 включає в себе її відповідний перелік сусідів. Цей перелік сусідів ідентифікує відповідні зсуви псевдовипадкового шумового (ПШ) коду сусідів. На Фіг.4 КБС 26 відповідає на будь-яке з множини запускаючих випадків установкою з'єднання зворотної доставки з БС1 32 і БС2 34. Згідно з одним з варіантів виконання спосіб 100 відновлення виклику ініціюється, як це проілюстровано на Фіг.6. Конкретний графік якості сигналу для одного прикладу ілюструється на Фіг.5. В цьому прикладі є час, щоб ідентифікувати МС 38 як таку, що має потенційну проблему. В способі 100 відновлення виклику одного варіанта виконання, показаного на Фіг.6А та 6В, при операції 102 БС1 32 надсилає у МС 38 призначення каналів по умовчанню для набору сусідніх базових станцій. Базові станції в наборі являють собою придатні для відновлення блоки, що мають необхідне для цього програмне і/або апаратне забезпечення, і мають зону(и) охоплення, які перекривають таку зону базової станції, що надсилає набір сусідів. Призначення каналу по умовчанню ідентифікують показник канального коду по умовчанню, які використовуються базовими станціями в наборі сусідів, включаючи і код для БС2 34. Кожна з базових станцій в наборі сусідів, здатних до відновлення, має розширений по умовчанню код, який буде використаний для ідентифікації мобільної станції, що потребує відновлення виклику. Цей розширений код в одному з варіантів виконання є конкретним кодом Уолша. БС2 34 при операції 104 надсилає на МС 38 випадок, що запускає спроби повторної передачі. Цей випадок, що запускає спробу повторної передач, диктує число спроб, які дозволені для МС 38 до ініціювання операцій відновлення виклику. Після цього БС1 32 визначає у розв'язувальному ромбі 106, чи мав місце запускаючий відновлення випадок. Якщо запускаючий відновлення випадок не відбувся, обробка очікує появу запускаючого випадку. При з'явленні запускаючого випадку іншому випадку обробка продовжується при операції 108 для видачі команди всім базовим станціям в НС для БС1 32 передавати на їх каналах по умовчанню, що відповідають МС 38. Зазначимо, що деякі з базових станцій в НС можуть не бути здатними встановити лінію зв'язку внаслідок слабкості ПЛЗ або ЗЛЗ, однак, кожна базова станція НС починає передавати до МС 38. Множина передавачів забезпечує сильніші сигнали ПЛЗ для МС 38 і більш надійну ЗЛЗ до КБС 26. Зазначимо, що згідно з даним варіантом виконання число спроб передати повідомлення ЗЛЗ або величина часу, що дозволяється для послідовних стирань, визначаються в КБС 26 і надсилаються до МС 38 через повідомлення і широкомовлення по виділених лініях радіозв'язку. Альтернативний варіант виконання використовує фіксований параметр, відмінний від інших параметрів. Один варіант виконання включає в себе функцію мобільних умов. Мобільні умови можуть враховувати, наскільки близький дійсний рівень передач МС 38 до максимального рівня передачі. Аналогічно, інша мобільна умова враховує якість ЗЛЗ, таку як стирання у поточному АН. Ще одна мобільна умова враховує внутрішньоконтурний дефіцит. Цей внутрішньоконтурний дефіцит являє собою різницю між заданим ЗСШ і ЗСШ, забезпеченим внутрішньоконтурним керуванням потужності. Інший варіант виконання об'єднує мобільну умову з типом передачі. Припустиме число спроб може регулюватися згідно зі статистикою втрачених викликів або викликів з утрудненнями. Наприклад, може існувати середнє число спроб, вище якого більшість викликів з утрудненнями не відновлюються. Інші міркування включають в себе навантаження ЗЛЗ, місцезнаходження МС 38 і/або час дня або дату. У останньому випадку деякі шаблони мобільного трафіку впливає на число мобільних станцій, що потребують швидкого відновлення виклику. Повертаючись до Фіг.6А, КБС 26 визначає поточний АН для мобільних станцій при операції 110. Після цього КБС 26 ініціює таймер ПНП при операції 112 і передає ПНП при операції 114. В цей момент система 10 бажає перенести лінії зв'язку з каналів по умовчанню. ЦІ канали по умовчанню є доступними для використання будь-якою з мобільних станцій системи 10 і тому їх використання має бути оптимізованим. Оскільки МС 38 використовує заданий канал по умовчанню, цей канал не доступний для використання іншою базовою станцією. Базовим станціям у НС доручається ініціювати передачі на альтернативному або новому каналі паралельно з передачами на каналі по умовчанню. Це є ініціацією умов передачі обслуговування. Якщо КБС 26 у розв'язувальному ромбі 118 прийняв від МС 38 повідомлення, яке сповіщає, що передача обслуговування завершена, обробка продовжується при операції 120, щоб роз'єднати лінії зв'язку МС 38 з членами НС на каналах по умовчанню. Потім обробка продовжується при операції 124. На противагу цьому, якщо повідомлення про завершення передачі обслуговування не було прийняте, КБС 26 перевіряє у розв'язувальному ромбі 118, чи відпрацював таймер ПНП. Якщо так, відповідний канал по умовчанню завершує передачі до МС 38, відновлення виклику скасовується операцією 124, а використання як каналу по умовчанню, так і нового каналу припиняється при операції 125. Операцією 126 відновлюється нормальна робота. Якщо ж у розв'язувальному ромбі 118 таймер не відпрацював, обробка повертається до очікування на повідомлення про завершення передачі зв'язку від МС 38 у розв'язувальному ромбі 118. Фіг.6В деталізує частину способу 100, де ілюструється операція 110 як ініціювання таймера при операції 130. КБС 26 перевіряє ПВРП у розв'язувальному ромбі 132. Якщо ПВРП прийняте, обробка виконується при операції 134, щоб встановити АН для включення сусідів, що були включені у ПВРП. Якщо ПВРП не прийняте, обробка продовжується у розв'язувальному ромбі 138, щоб визначити, чи відпрацював таймер (ініційований операцією 130). Якщо так, обробка продовжується у розв'язувальному ромбі 144. Якщо ні - обробка повертається у розв'язувальний ромб 132. Після того, як АН встановлений при операції 134, якщо ЗЛЗ підлягає покращенню у розв'язувальному ромбі 136, КБС 26 визначає, чи є які-небудь сусіди, що не включені до ПВРП, які прийняли сигнал(и) МС 38 у розв'язувальному ромбі 140. Ці сусіди називаються слухаючими сусідами (СС) і вони додаються до АН при операції 142. Потім обробка повертається до операції 112 Фіг.6А. Якщо таймер відпрацював і ПВРП не було прийняте, КБС 26 визначає у розв'язувальному ромбі 144 наявність сусідів, які прийняли сигнал(и) МС 38, тобто СС. В цьому випадку АН встановлюється при операції 146 для включення в себе ці СС. Якщо у розв'язуючому ромбі 144 не виявлено ніяких СС, відновлення виклику припиняється при операції 148 і виклик завершується. У розв'язуючому ромбі 110 спосіб визначає, чи був увімкнений передавач МС 38. Якщо він вимкнений, КБС 26 дає команду МС 38 увімкнути передавач при операції ПО. Спосіб 200 відновлення виклику мобільної станції для одного варіанту виконання ілюструється на Фіг.7. При операції 202 МС 38 здійснює зв'язок з базовими станціями АН(0). Цим ідентифікується поточний АН. Якщо запускаючий відновлення випадок відбувся у розв'язувальному ромбі 204, обробка продовжується у розв'язувальному ромбі 208. Запускаючий відновлення випадок може бути одним з розглянутих вище, або альтернативне зазначення, що МС 38 потребує операції типу аварійного відновлення, тобто МС 38, можливо, втрачає лінію зв'язку ПЛЗ. Якщо не відбувається ніякого запускаючого випадку, нормальна робота продовжується при операції 206. Розв'язувальний ромб 208 визначає, чи дозволена робота передавача в МС 38. Якщо робота передавача дозволена, обробка продовжується при операції 214, якщо ні, МС 38 перевіряє умову запускаючого випадку у розв'язувальному ромбі 210. Якщо умова запускаючого випадку є, це вказує, що МС 38 повинна заборонити (заблокувати) роботу передавача, потім при операції 212 виконуються належні дії, і обробка продовжується при операції 214. Відсутність запускаючого випадку вказує, що робота передавача повинна бути заборонена, потім обробка продовжується при операції 214. При операції 214 встановлюється таймер чекання. Цей таймер чекання перевіряється у розв'язувальному ромбі 216, і відпрацювання таймера відновлення запускається при операції 218. Якщо таймер чекання не відпрацював, обробка продовжується у розв'язувальному ромбі 222, щоб визначити, чи повернулась МС 38 до нормального режиму роботи. Нормальна робота продовжується з операції 206, в іншому випадку обробка повертається до чекання або відбувається перехід назад до чекання відпрацювання таймера чекання. Далі на Фіг.7, з операції 218, якщо передавач в МС 38 заблокований, операцією 220 передавач розблоковується. МС 38 передає заданий заголовок протягом часового інтервалу Y. Цей заголовок надає інформацію про передачу МС 38, але не фактичні дані або символи. У розв'язувальному ромбі 228, якщо приймається ПВРП або якщо приймається деяке повідомлення, що підтверджує ПВРП, МС 38 переходить до чекання заданого часового інтервалу X, після якого оновлюється АН. Якщо у розв'язувальному ромбі 230 ні ПНП, ні ПВСП не було прийняте, обробка продовжується у розв'язувальному ромбі 232, щоб перевірити, що ПВРП не було передане більше, ніж максимально дозволене число разів. Якщо ПВРП може бути передане ще раз, тобто цей максимум не був досягнутий, обробка повертається до операції 228 і ПВРП передається ще раз. Однак, якщо максимум був досягнутий, обробка продовжується при операції 236, і відновлення виклику припиняється. Згідно з альтернативним способом відновлення виклику КБС 26 інформує всіх здатних до відновлення сусідів БС1 32 про потенційну проблему. КБС 26 дає команду МС 38 ввімкнути передавальну частину МС 38 і дає команду базовій станції(ям) в наборі сусідів прослуховувати МС 38. При виявленні або запиті сигналу від МС 38 кожна базова станція в наборі сусідів передає доповідь. Доповіді приймаються від піднабору базових станцій, причому цей під набір може включати в себе всі базові станції в наборі сусідів або частину базових станцій. КБС 26 інформує МС 38 про канали по умовчанню кожної базової станції в цьому під наборі. Базові станції потім використовують прийнятний канал по умовчанню для започаткування зв'язку з МС 38. Згідно з ще одним способом, піднабІр набору сусідів визначається на основі найбільш останнього переданого ПВРП. Проблема полягає в тому, що останнє передане ПВРП може бути прийняте неправильно, і у цьому випадку ПВРП, яке використовується для ідентифікації піднабору, неправильне. Як приклад, коли останнє прийняте ПВРП ідентифікує БС1 32 і БС3 36, а МС 38 надіслала наступне ПВРП, яке ідентифікує БС1 32 і БС2 34, яке не було прийняте, відновлення виклику порушується. КБС 26 встановлює мережу зворотної доставки з БС3 36, і БС3 36 починає передачі до МС 38 на каналі по умовчанню. Але МС 38 вважає, що зв'язок буде встановлюватися з БС2 34 для відновлення виклику, і готується до виключення на іншому каналі по умовчанню. Надлишкова передача від БС3 36 витрачається марно і ефективно створює додатковий шум у системі 10. Коли відновлення виклику ініціюється МС 38, може бути використаний таймер для затримки цього ініціювання після випадку, що запускає відновлення виклику. Період часу для цього таймера може встановлюватися КБС 26. Після відпрацювання цього таймера МС 38 передає у заголовок на каналі пілотсигналу ЗЛЗ. Цей заголовок включає в себе повідомлення відновлення виклику. В одному варіанті виконання заголовок є заданою сталою, яка може бути встановлена контролером 26 базової станції. У альтернативному варіанті виконання заголовок має змінну довжину, яка визначається системним оператором. Після передачі заголовка МС 38 надсилає повідомлення стосовно зміни (змін) ПЛЗ. Цим повідомленням може бути повідомлення вимірювання рівня пілот-сигналу (ПВРП). Це повідомлення можна надсилати декілька разів для надійного прийому другою базовою станцією БС2 34. Комбінації наведених вище способів забезпечують різні переваги для відновлення виклику. У одному варіанті виконання спосіб відновлення виклику базується на середовищі радіопередачі базової станції вихідної комірки. Коли число сусідів, які здатні відновлювати виклик, є малим, наприклад, 2, КБС 26 дає команду всім сусідам передавати на відповідних каналах по умовчанню. АН оновлюється і передавач МС 38 розблоковується без затримки. Для більш крупних наборів сусідів, які здатні відновлювати виклик, КБС 26 дає команду сусідам прослухувати сигнали від МС 38. Після затримки, яка витрачена на чекання, коли сусіди повідомлять про те, чи можуть вони приймати сигнали від МС 38, тим, що чують сусідів, дають команду використовувати канали по умовчанню. Таким же чином, якщо ПВРП приймається від МС 38 у заданому часовому інтервалі, базовим станціям, ідентифікованим за допомогою ПВРП, дають команду використовувати канали по умовчанню. Зазначимо, що коли ПЛЗ працює належним чином, що визначається фіксованим числом послідовних кадрів, команди керування потужністю (КП), направлені через підканал КП, вважаються достовірними. Фіг.8 ілюструє архітектуру системи 10 безпровідного зв'язку за Фіг.1 у форматі структури рівнів. Архітектура 700 включає три рівні: рівень 702 сигналізації, рівень 704 лінії зв'язку і фізичний рівень 706. Рівень 702 сигналізації забезпечує сигналізацію 708 верхнього рівня, послуги 710 передачі даних і послуги 712 передачі голосу. Рівень 702 сигналізації забезпечує передачу голосу, передачу пакетних даних, прості схемні дані і одночасні послуги передачі голосу і пакетних даних. Протоколи і послуги надаються на цьому рівні, що відповідає двом нижчим рівням. Рівень 704 лінії зв'язку розділяється на підрівень 714 керування доступом до лінії зв'язку (КДЛ) (LAC) і підрівень 716 керування доступом до середовища (КДС). Додатки і протоколи рівня 712 сигналізації використовують послуги, які надаються рівнем 714 КДЛ. Рівень 704 лінії зв'язку слугує інтерфейсом між протоколами верхнього рівня і додатками рівня 702 сигналізації і фізичного рівня 706. Підрівень 716 КДС включає в себе блок 722 мультиплексування і забезпечення якості послуги (ЯП). Рівень 704 лінії зв'язку з'єднує рівень 702 сигналізації з фізичним рівнем 706. Фізичний рівень 706 утворюється фізичним каналом 724 передачі. Фіг.9 містить сценарій тактування для роботи системи 10 за Фіг.1 згідно з одним із варіантів виконання. Робиться посилання на способи за Фіг.6А, 6В, 7. Горизонтальна вісь відповідає часу, вертикальна вісь - різні канали передачі. Базова станція вихідної комірки БС1 32 показана посередині, а інформація передається до МС 38 по каналу трафіку. Два канали ілюстровані для МС 38: канал Тх передачі і канал Rx прийому. Для каналу прийому показані два сценарії: RX1 і Rx2. Показана також сусідня базова станція, яка є кінцевою базовою станцією. БС2 34. Показані як канал по умовчанню, так і новий канал. Новий канал являє собою канал, який підлягає використовуванню для зв'язку з МС 38 після передачі обслуговування. Обробка починається з того, що МС 38 приймає передачі від першого АН, ідентифікованого як АН(0). МС 38 одночасно передає на каналі трафіку до БС1 32 вихідної комірки. У момент t1 відбувається випадок, який запускає відновлення виклику. І БС1 32 і МС 38 розпізнають цей запускаючий випадок. Зазначимо, що запускаючий випадок може бути загальним випадком, таким, як безперервні запити КП від МС 38 до БС1 32, щоб збільшити потужність передачі в ПЛЗ, або може бути окремими подіями для МС 38 і БС1 32. Крім того, МС 38 і БС1 32 можуть не розпізнати запускаючий випадок одночасно. Часто МС 38 може знаходитися у положенні, щоб розпізнати запускаючий випадок до БС1 32 під час відмов ПЛЗ. Коли запускаючий випадок ідентифікується у момент t1 KBC 26 БС1 ініціює передачу від сусідньої БС2 34 каналу по умовчанню. У момент t2 БС2 34 починає передавати у каналі по умовчанню до МС 38. Ця передача здійснюється паралельно з тією ж самою передачею від БС1 32. Коли відбувається запускаючий випадок, МС 38 блокує передавач на заданий часовий інтервал чекання. У момент t3 інтервал чекання закінчується і МС 38 протягом часового інтервалу Y передає заголовок. Одночасно АН у МС 38 змінюється з АН(0) на АН(1). Базові станції, ідентифіковані у АН(1), всі є базовими станціями, переліченими у останньому ПВРП. У альтернативному варіанті виконання АН(1) може бути також набором з усіма сусідами для БС1 32 і самою БС1 32. У момент t4 заголовок закінчується і МС 38 починає передавати поточне ПВРП. У відповідь на прийом ПВРП у момент t5, БС1 32 і БС2 34 передають ПНП у момент t6. ПНП сигналізує зміну АН на АН(2) у момент t8. Зазначимо, що наступне ПВРП передається у момент t7, причому ПВРП передається періодично, щоб ідентифікувати сигнали, прийняті у МС 38. У момент t8 БС2 34 починає передачу на новому каналі для МС 38. МС 38 передає ПНП, яке запускає завершення передач для МС 38 у каналі по умовчанню у момент t9. В одному варіанті виконання ПНП передається періодично або безперервно до тих пір, доки їх правильний прийом не підтвердиться базовою станцією. В сценарії, проілюстрованому на Фіг.9, відновлення виклику починається у момент t2 і завершується у момент t9. В момент t9 передача обслуговування закінчується, і БС2 34 є поточною базовою станцією вихідної комірки для МС 38. Альтернативний сценарій ілюструється для каналу прийому Rx2. Тут АН(0) залишається активним до моменту t5. Після моменту t5 MC 38 продовжує приймати з АН(0) протягом заданого часового інтервалу X, після чого відбувається зміна на АН(1). Це забезпечує додатковий час для сторони базової станції, щоб визначити піднабір здатних відновлювати виклик сусідів БС1 32 для передачі у МС 38 для відновлення. У момент t8 відбувається наступна зміна у відповідь на ПНП з АН(1) на АН(2). Цей сценарій відповідає способу, в якому тільки тим сусідам, які здатні приймати сигнали від МС 38, дається команда передавати через відповідні канали по умовчанню. Після завершення відновлення виклику і завершення передачі обслуговування МС 38 повинна визначити початковий рівень потужності передачі. Згідно з одним варіантом виконання система 10 за Фіг.1 використовує замкнений контур керування потужністю (система із зворотним зв'язком) для регулювання рівнів потужності передачі. Альтернативні варіанти виконання можуть для цього використовувати додатковий спосіб розімкненого контуру керування потужністю (система без зворотного зв'язку). Відкритий контур відноситься до роботи, керованої передавачем (або мобільною або базовою станцію), коли приймач не залучений безпосередньо. Наприклад, конкретне керування потужністю розімкненого контуру зворотної лінії зв'язку звертається до мобільної станції, щоб відрегулювати потужність передачі зворотної лінії зв’язку, на основі рівня потужності сигналів, прийнятих від базової станції по прямій лінії зв'язку. Керування потужністю замкненого контуру розширює роботу відкритого контуру, внаслідок чого приймач активну приймає участь у прийнятті рішень про регулювання потужності. Наприклад, для керування потужністю замкненого контуру ЗЛЗ базова станція порівнює рівень потужності сигналів, прийнятих від заданої мобільної станції, з пороговим значенням. Потім базова станція дає команду мобільній станції підвищити або знизити потужність передачі зворотної лінії зв'язку на основі цього порівняння. Навпаки, мобільна станція відслідковує рівень потужності сигналів, прийнятих по ПЛЗ, і забезпечує зворотний зв'язок за якістю ПЛЗ для базової станції. Робота замкненого контуру використовується для компенсації коливань потужності, пов'язаних з завмиранням, наприклад, завмиранням Релея, заданої лінії зв'язку. Безпосередньо після того, як закінчиться таймер чекання і до встановлення керування потужністю МС 38 починає передавати на початковому рівні потужності. Рівень потужності передачі ЗЛЗ може поновлюватися від того, який мав місце перед блокуванням передавача МС 38. Рівень потужності може залишатись на цьому початковому рівні до тих пір, доки не поновиться замкнений керування потужністю у замкненому контурі. У альтернативному варіанті виконання рівень потужності ініціюється на останньому рівні перед блокуванням передавача, а потім поступово збільшується з заданою швидкістю до тих пір, поки не поновиться керування потужністю у замкненому контурі. Швидкість збільшення звичайно встановлюється БС1 32 і/або БС2 34 і може бути сталою або змінною. Ці збільшення продовжуються до тих пір, доки не відновиться керування потужністю у замкненому контурі ЗЛЗ. Інший варіант виконання починає відновлення керування розімкненим контуром на основі загальної прийнятої потужності в смузі частот. Ця процедура аналогічна процедурі доступу у IS-95 і IS-2000. Це може бути коректуватися для множини базових станцій прямої лінії зв’язку, видимих на МС 38. Керування розімкненим контуром продовжується до тих пір, доки не поновиться керування потужністю у замкненому контурі. Фіг.10 ілюструє регулювання потужності згідно з даним варіантом виконання. Горизонтальна вісь являє собою час, а вертикальна - рівень потужності передачі. У перший момент t1 потужність передачі має початковий рівень. Після першого часового інтервалу у момент t2 потужність передачі підвищується на задану величину приросту. Ця величина приросту може бути фіксованою або може бути змінною, зростаючою або спадною із збільшенням часу. У одному варіанті виконання величина приросту є адаптивною і залежить від умов у системі 10, причому величина приросту може зростати або зменшуватися від одного часового інтервалу до наступного часового інтервалу. Нарешті, заданий максимальній рівень потужності передачі може досягатися після заданого числа часових інтервалів. Потім потужність передачі знаходиться на граничному значенні у чеканні відновлення керування потужністю у замкненому контурі. В ще одному варіанті виконання початкова потужність передачі базується на якості прийнятих пілотсигналів. Якість сигналів вимірюється відношення Е с/І 0 пілот-сигналу або величиною Ес пілот-сигналу для призначеного АН. При керуванні потужністю у розімкненому контурі потужність передачі звичайно має співвідношення, задане як: Tx = (-Rx) + k, (1) де k - стала, Тх - енергія передачі ЗЛЗ, a Rx - прийнята енергія ПЛЗ. Для способу керування потужністю у замкненому контурі потужність передачі звичайно має співвідношення, задане як: Тх = (-Rx) + k + y(t), (2) де y(t) - кумулятивна змінна корекції, основана на всіх достовірних командах керування потужністю, прийнятих до моменту t Вираз (k + y(t)) позначається як b. У альтернативному вигляді справедливе наступне співвідношення: Тх + Rx = k + y(t), (3) Визначення початкової потужності передачі застосовує значення b попередніх передач до нових передач. Новий рівень потужності обчислюється тоді як: Tx(t) = (-Rx(t) + Тх(0) + Rx(0), (4) де Тх(0) - енергія передачі до відновлення виклику, Rx(0) - прийнята енергія до відновлення виклику. У цьому випадку потужність передачі регулюється згідно з попереднім відношенням рівня потужності передачі до рівня потужності прийому. МС 38 з безпровідним пристроєм, що працює в системі 10 за Фіг.1, наприклад, стільниковий телефон або персональний цифровий асистент (ПЦА) (PDA) ілюструється на Фіг.11. МС 38 включає в себе антену 300 для прийому і передачі. Антена 300 зв'язана з дуплексером 302 для ізолювання приймального тракту від передавального тракту. Дуплексер з'єднаний з приймальною схемою 308, яка утворює приймальний тракт, і з підсилювачем 304 і передавальною схемою, яка утворює передавальний тракт. Підсилювач 304 додатково з’єднаний з блоком 310 регулювання потужності, який забезпечує керування підсилювачем 304. Підсилювач 304 приймає сигнали передачі від передавальної схеми 306. Прийняті сигнали через антену 300 надходять у блок 314 керування потужністю, який реалізовує схему керування потужністю у замкненому контурі. Блок 314 керування потужністю зв'язаний з комунікаційною шиною 318. Ця комунікаційна шина 318 забезпечує загальне з’єднання між модулями в МС 38. Комунікаційна шина 318 зв'язана додатково з пам'яттю 322 і блоком 316 регулювання відновлення. Пам'ять 322 зберігає машиночитані команди для різних операцій і функцій МС 38. Процесор 320 виконує команди, що зберігаються у пам'яті 322. Для нормальних умов роботи блок керування потужності генерує сигнал КП для блока 310 регулювання потужності через мультиплексор 312. Блок 310 регулювання потужності потім переносить сигнал КП як рівень підсилення до підсилювача 304. Під час відновлення виклику МС 38 може заблокувати передавач. Коли передавач розблокується, сигнал завершення передачі обслуговування подається до блока 316 регулювання відновлення. Цей сигнал завершення передачі обслуговування дає команду блоку 316 регулювання відновлення генерувати заданий сигнал КП. Генерований таким чином сигнал КП може втілювати будь-яку із схем для обговореного вище генерування початкової потужності передачі ЗЛЗ, або може втілювати альтернативний спосіб. Сигнал завершення передачі обслуговування надається також мультиплексору 312. Після відновлення виклику сигнал КП. генерований блоком 316 регулювання відновлення, надсилається до блока 310 регулювання потужності. Паралельно починається керування потужністю у замкненому контурі. Коли керування потужністю у замкненому контурі відновиться повністю, сигнал завершення передачі обслуговування скасовується, а мультиплексор 312 вибирає сигнал КП, генерований блоком 314 керування потужністю, щоб подати його на блок 310 регулювання потужності. Робота блока 316 регулювання відновлення може виконуватися мікропроцесором 320, що працює згідно з програмними командами, або може втілюватися в апаратурі для ефективної і надійної роботи. У одному варіанті виконання конкретні операції МС 38 або БС1 32 розглядаються як спеціальні події. Ці спеціальні події включають в себе множину умов і процедур, які можуть викликати появу запускаючих випадків. Інакше кажучи, спеціальні події можуть створювати ситуацію, коли відбувається запускаючий відновлення виклику випадок, але виклик не придушується. Однією спеціальною подією є пошук локатора місцеположення мобільної станції. МС 38 одержує команду вести пошук на альтернативній частоті сигналу глобальної системи позиціонування (ГСП) (GSP). ГСП надає місцеположення МС 38 або часткову інформацію місцеположення МС 38. Пошук локатора місцеположення мобільної станції здійснюється періодично або аперіодично. Звичайно МС 38 має апріорну інформацію, що стосується тактування таких пошуків. Інші події можуть включати в себе пошук частот-кандидатів при приготуванні до між частотної апаратної передачі обслуговування, коли мобільна станція настроюється на іншу частоту, щоб шукати сигнал від базових станцій на інших частотах. Інші події можуть включати в себе дії МС 38 в той час, коли запускаючий випадок має бути ігнорований. У таких випадках МС 38 повідомляє БС1 32 вихідної комірки про спеціальну подію. У одному варіанті виконання спеціальною подією є пошук частоти кандидата, при цьому МС 38 настроюється на іншу частоту, щоб переглядати сигнали від сусідніх базових станцій на цій частоті. Це забезпечує краще перенесення між покриттями на різних частотах, наприклад, перемикання між частотою системи персонального зв'язку (ПСС) (PCS) і стільниковою частотою. При появі такого типу спеціальної події, ініційованої мобільною станцією, МС 38 повідомляє БС1 32 вихідної комірки ігнорувати запускаючі випадки відносно МС 38 протягом конкретного часового інтервалу або до подальшого повідомлення. Згідно з одним варіантом виконання, для усунення таких хибних запусків протягом спеціальних подій, базова станція вихідної комірки, така як БС1 32, дає дозвіл на цю подію і повідомляє МС 38 про тактування цієї події, в тому числі щонайменше, коли ця подія повинна початися, і тривалість часу, виділеного для цієї події. МС 38 і базові станції в її АН забороняють ініціювати запуск(и) відновлення виклику під час спеціальної події. У альтернативному варіанті виконання МС 38 повідомляє БС1 32 про настання спеціальної події або набору цих спеціальних подій. У відповідь на це повідомлення БС1 32 може санкціонувати спеціальну подію або перепланувати цю подію. Знову таки, це забезпечує МС 38 та базові станції в її АН достатньою інформацією, щоб заблокувати запуски відновлення виклику протягом спеціальної події. Отже, був запропонований новий і удосконалений спосіб підтримання зв'язку у системі безпровідного зв'язку. Коли лінія зв'язку між мобільною станцією і відповідною базовою станцією вихідної комірки порушується, мобільна станція і інфраструктура попередньо встановлюють потенційні базові станції аварійного відновлення. Базова станція вихідної комірки контактує з усіма здатними відновлювати виклик сусідами як потенційними станціями аварійного відновлення. Здатний відновлювати виклик сусід має заданий канал по умовчанню, виконаний з можливістю м'якої передачі обслуговування з мобільною станцією. Цей канал по умовчанню використовується лише тимчасово протягом початкової частини передачі обслуговування. Кожній базовій станції аварійного відновлення дається команда використовувати канал по умовчанню для передач аварійного відновлення. Передачею аварійного відновлення вважається операція відновлення виклику. Мобільна станція встановлює м'яку передачу обслуговування з базовою станцією аварійного відновлення, при цьому ПЛЗ використовує канал по умовчанню. Базова станція аварійного відновлення ініціює потім передачі на альтернативному каналі. Коли передача обслуговування завершується, базова станція аварійного відновлення припиняє використовування каналу по умовчанню відносно передач до мобільної станції. У одному варіанті виконання базова станція вихідної комірки забезпечує мобільну станцію переліком здатних до відновлення виклику сусідів як запасних протягом передач і перед розв'язанням проблеми лінії зв'язку. У цьому випадку, для ситуацій, в яких ПЛЗ втрачається до прийому інформації передачі обслуговування, мобільна станція має достатньо інформації для виконання передачі обслуговування. У альтернативному варіанті виконання для сусідів БС2 34 призначаються більше одного каналу по умовчанню. Використання множини каналів по умовчанню або каналів аварійного відновлення збільшує здатність відновлення виклику системи 10. Кожний сусід потім здатний зробити внесок у відновлення виклику більш ніж однією мобільною станцією, такою як МС 38. При роботі, перед відновленням виклику, БС1 32 вихідної комірки забезпечує БС2 34 ідентифікатором, що відповідає множині каналів, пов'язаних з БС2 34. МС 38 і БС2 34 кожна зберігають детермінуючу функцію, таку як хеш-функція, для відображення ідентифікаторів на конкретний канал. Використовування хеш-функції. зокрема, є псевдовипадковою процедурою. У доповнення до цього, МС 38 призначається електронний серійний номер. Електронний серійний номер може зберігатись у МС 38 або може надаватись МС 38 при відновленні виклику. При відновленні виклику БС1 32 вихідної комірки надає електронний серійний номер МС 38 до БС2 34. БС2 34 та МС 38 обидві застосовують задану функцію для обчислення прийнятного каналу по умовчанню. Хеш-функція для структури даних дозволяє розпізнати ключове слово у наборі слів за допомогою лише одного звертання до структури даних. Хеш-функція відображає свій аргумент в результат заданого типу. Хешфункція с детермінуючою і не має свого стану. Тобто, зворотне значення залежить лише від аргумента, причому однакові аргументи дають однакові результати. Для хеш-функції важливо мінімізувати зіткнення, причому зіткнення визначається як два різних аргументи, які хешуються в одне і те саме значення. Важливо також, щоб розподілення хеш-значень було рівномірним; тобто імовірність того, що хеш-функція поверне якесь конкретне значення заданого виду, повинна бути приблизно такою ж, як і імовірність того, чи поверне вона будь-яке інше значення. У альтернативних варіантах виконання для ідентифікації множини каналів по умовчанню на відновлення виклику можуть втілюватися і інші види криптографічних функцій. Як приклади, різні ілюстративні логічні блоки, модулі, схеми і операції алгоритму, описані у зв'язку з варіантами виконання, розкритими тут, можуть втілюватися і виконуватися процесором цифрових сигналів (ПЦС) (DSP), прикладною спеціалізованою інтегральною схемою (ПСІС) (ASIC), програмованою користувачем логічною матрицею (ПКЛМ) (FPGA) або іншим програмованим логічним пристроєм, дискретною вентильною або транзисторною логікою, дискретними апаратними компонентами, такими як, наприклад, регістри і елементи з алгоритмом обслуговування запитів і порядку надходження (FIFO), процесором, що виконує набір апаратно-програмних команд, будь-яким програмованим програмним модулем і процесором, або будь-якою їх комбінацією, розробленою для виконання описаних тут функцій. Програмні модулі можуть знаходитися в пам'яті ОЗП, флеш-пам'яті, пам'яті ПЗП, пам’яті СППЗП, пам'яті ЕСППЗГТ, регістрах жорсткому диску, знімному диску, ПЗП-КД (CD-ROM) або в будь-якому іншому виді запам'ятовуючого носія, відомого з рівня техніки. Процесор може знаходитися в ПСІС (не показано). ПСІС може знаходитись у телефоні (не показаний). Альтернативно, процесор може знаходитись у телефоні. Процесор може втілюватися в комбінації ПЦС і мікропроцесора або як два мікропроцесори разом з ядром ПЦС, і т.д. Попередній опис переважних варіантів виконання призначений дати можливість фахівцю в даній галузі техніки зробити або використати даний винахід. Різні модифікації цих варіантів виконання будуть зразу ж зрозумілими для фахівця в даній галузі техніки, а загальні принципи, визначені тут, можуть застосовуватися до інших варіантів виконання без використання винахідницьких здібностей. Таким чином, даний винахід не призначений для обмеження показаними тут варіантами виконання, але повинний відповідати найширшому об'єму, який співпадає з принципами і новими ознаками, розкритими тут.
ДивитисяДодаткова інформація
Назва патенту англійськоюWireless communication device for cdma communication systems
Автори англійськоюChen Tao
Назва патенту російськоюБеспроводное устройство связи в системах связи cdma
Автори російськоюЧен Тао
МПК / Мітки
МПК: H04Q 7/00
Мітки: пристрій, безпровідній, системі, зв'язку
Код посилання
<a href="https://ua.patents.su/14-79233-bezprovidnijj-pristrijj-zvyazku-dlya-sistemi-zvyazku-cdma.html" target="_blank" rel="follow" title="База патентів України">Безпровідний пристрій зв’язку для системи зв’язку cdma</a>
Спосіб і пристрій визначення робочої сітки частот системи звязку із стрибкоподібною зміною частоти
Номер патенту: 63931
Опубліковано: 16.02.2004
Автор: Сорочан Анатолій Григорович
МПК: G01R 23/00
Мітки: спосіб, стрибкоподібною, сітки, зміною, визначення, пристрій, частоти, частот, зв'язку, системі, робочої
Формула / Реферат:
1.Спосіб визначення робочої сітки частот системи зв’язку із стрибкоподібною зміною частоти, який ґрунтується на тому, що вхідний сигнал із стрибкоподібно змінюваною робочою частотою Wс, яка знаходиться в діапазоні частот DW, розгалужують на три частини, в першій частині сигнал зміщують по частоті на частоту гетеродину Wг1 і затримують на сталу часу t01, одержаний сигнал перемножують з другою частиною сигналу, після чого на частоті Wг1...
Спосіб одночасної передачі сукупності типів даних та спосіб прийому передачі, мультиплексованої з розділенням часу у системі безпровідного звязку, а також передавальний та приймальний вузли такої системи
Номер патенту: 74396
Опубліковано: 15.12.2005
Автори: Ландбі Стайн А., Вілленеґґер Серж
МПК: H04J 4/00, H04L 27/00, H04J 13/00, H04B 7/26
Мітки: такої, безпровідного, зв'язку, передавальний, мультиплексованої, часу, одночасної, також, вузлі, сукупності, системі, приймальний, спосіб, прийому, даних, типів, передачі, розділенням
Формула / Реферат:
1. Спосіб одночасної передачі сукупності типів даних у системі безпровідного зв'язку, який включає:- прийом і обробку першого типу даних згідно з першою схемою обробки сигналу для генерування першого корисного навантаження,- прийом і обробку другого типу даних згідно з другою схемою обробки сигналу для генерування другого корисного навантаження,- визначення у інтервалі передачі першої частини, призначеної для передачі...
Спосіб передачі інформації від базової станції до мобільних станцій системи зв’язку (варіанти) та пристрій для його здійснення (варіанти)
Номер патенту: 64820
Опубліковано: 15.03.2004
Автори: Тідеманн Едвард Г., мол., Ландбі Стайн А.
Мітки: інформації, станції, передачі, системі, варіанти, мобільних, здійснення, пристрій, базової, спосіб, зв'язку, станцій
Формула / Реферат:
1. Спосіб передачі інформації від базової станції до мобільних станцій системи зв'язку, який включає операції:(A) ідентифікації у часовому кадрі прямого каналу щонайменше однієї частини, яка має наявну ємність для передачі у прямому каналі щонайменше частини щонайменше одного не передбаченого розкладом інформаційного потоку на додаток до будь-яких інформаційних потоків, передбачених розкладом, і(B) одночасної передачі...
Спосіб припинення використання каналу зв’язку безпровідної системи зв’язку, термінал доступу та пристрій такої системи
Номер патенту: 73159
Опубліковано: 15.06.2005
Автор: Гоугленд Грег М.
Мітки: термінал, системі, такої, припинення, пристрій, каналу, доступу, використання, безпровідної, спосіб, зв'язку
Формула / Реферат:
1. Спосіб припинення використання каналу зв'язку безпровідної системи зв'язку, який включає операції:- декодування прийнятого сигналу і- припинення використання каналу зв'язку, якщо протягом зумовленого контрольного часу були невдалими спроби успішного декодування конфігураційного пакета з зазначеного прийнятого сигналу.2. Спосіб за п. 1, який відрізняється тим, що додатково включає операції:- успішного декодування...
Базова станція системи зв’язку з рухомими об’єктами
Номер патенту: 13999
Опубліковано: 17.04.2006
Автори: Глуцький Володимир Іванович, Санніков Семен Гнатович, Микусь Сергій Анатолійович, Катков Юрій Ігоревич, Корнієнко Ігор Валентинович
МПК: H04B 7/26
Мітки: системі, зв'язку, базова, об'єктами, станція, рухомими
Формула / Реферат:
Базова станція системи зв'язку з рухомими об'єктами, що містить приймально-передавальний пристрій, який з'єднаний з контролером за допомогою шин, секторні антени, при цьому приймально-передавальний пристрій з'єднується з секторними антенами за допомогою фідера, антенно-щогловий пристрій, на якому розташовані секторні антени, яка відрізняється тим, що секторні антени виконані зі здатністю створення у горизонтальній площині еліптичної діаграми...
Попередній патент: Спосіб захисту суднових труб від корозії в морській воді
Наступний патент: Пристрій для обробки поверхні довгомірних виробів
Випадковий патент: Спосіб виготовлення об'ємних нанокристалічних сплавів