Інтерактивна система дистанційного керування об’єктами
Номер патенту: 98529
Опубліковано: 25.05.2012
Автори: Лутов Артем Віталійович, Харагоргієв Сергій Маркович
Формула / Реферат
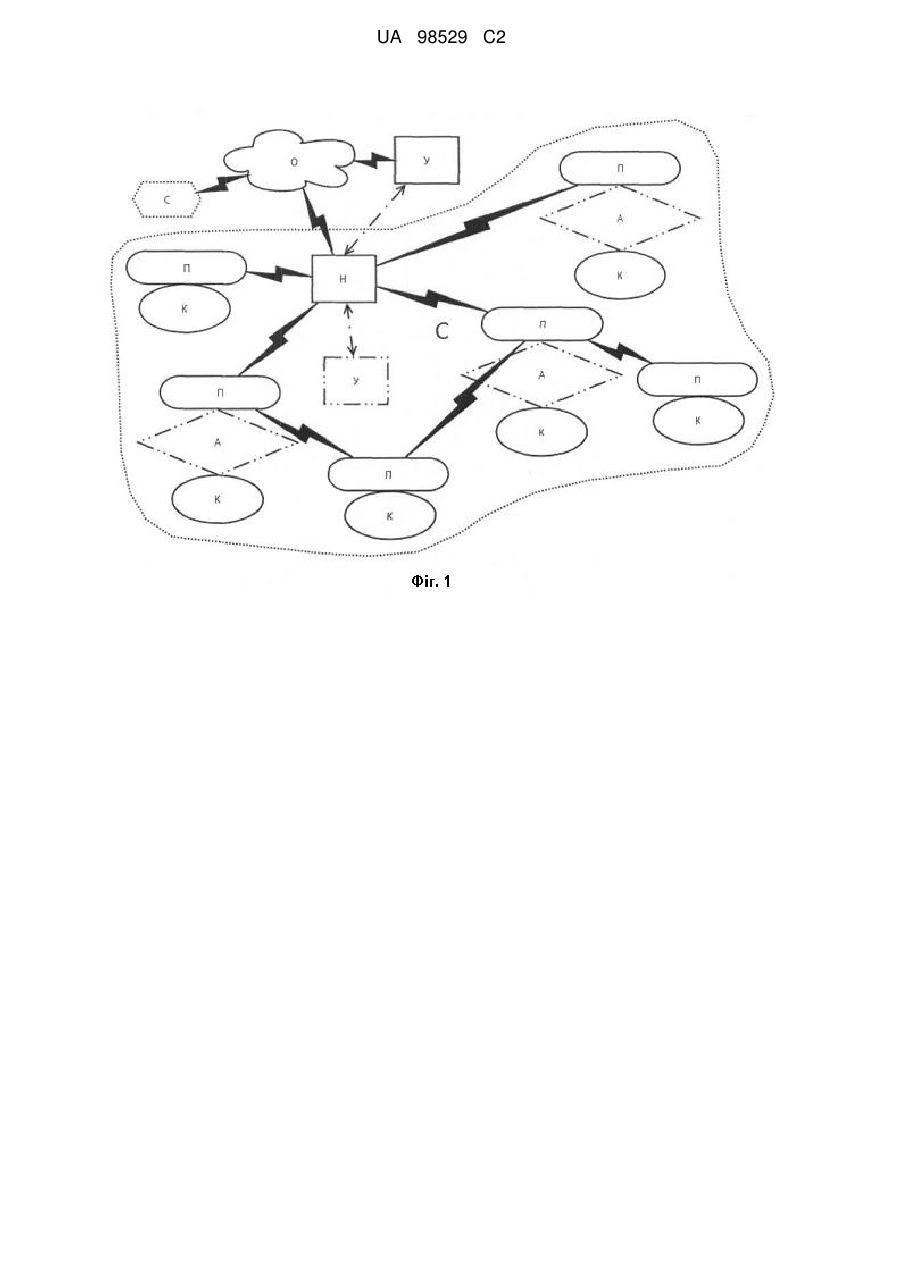
1. Інтерактивна система дистанційного керування об'єктами, що містить щонайменше один прилад керування (У), зв'язаний з одним або множиною кінцевих контрольованих пристроїв (К), які згруповані у кластери відповідно до географічного положення, кожний кластер складається з базової станції (Н) та щонайменше одного кінцевого контрольованого пристрою (К), які зв'язані каналами зв'язку через мережу приймачів-передавачів з контролерами (П) та з можливістю підключення адаптера інтерфейсу (А) до кінцевого контрольованого пристрою, яка відрізняється тим, що адаптер інтерфейсу виконаний з можливістю безпосереднього керування кінцевим контрольованим пристроєм та містить сенсори для моніторингу роботи кінцевого контрольованого пристрою (К) та відправки статистичних даних роботи кінцевого контрольованого пристрою (К) до базової станції (Н) кластера через мережу приймачів-передавачів з контролерами (П), а прилади керування (У) є персональними пристроями користувачів загального призначення, такими як смартфони тощо, що містять обчислювальний пристрій з пам'яттю (101), такий як мікроконтролер, зв'язаний з мережевими та локальними інтерфейсами вводу-виводу (102-105, 107-109) і джерелом живлення (106) та виконаний з можливістю програмного розширення функцій керування та моніторингу кінцевих контрольованих пристроїв (К) через мережевий зв'язок з базовою станцією (Н) кластера, яка є міні/мікрокомп'ютером та містить щонайменше один обчислювальний пристрій з пам'яттю (201), такий як мікроконтролер, зв'язаний з мережевими та локальними інтерфейсами вводу-виводу (202-205, 208, 209) і джерелом живлення (206), станція (Н) виконана з можливістю передачі даних моніторингу та відгуків на керування до приладів керування (У) та команд/сигналів керування по локальній мережі кластера через приймачі-передавачі з контролерами (П) до кінцевого контрольованого пристрою (К), при цьому адаптер інтерфейсу (А) виконаний з можливістю перетворення команд/сигналів керування від базової станції (Н) у відповідний до кінцевого контрольованого пристрою вид керування і монтується усередині або зовні кінцевого контрольованого пристрою.
2. Система за п. 1, яка відрізняється тим, що базова станція (Н) та/або приймачі-передавачі з контролерами (П) та/або адаптери інтерфейсу (А) мають щонайменше два джерела автономного живлення для поперемінного їх підключення та посилання сигналу про їх роботу до інтерфейсу користувача.
3. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що канали між пристроєм керування (У) та базовою станцією (Н) та/або між базовою станцією (Н) та адаптерами інтерфейсу (А) є захищеними від несанкціонованого доступу.
4. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що операційні системи базової станції (Н) та пристроїв керування (У) виконані з можливістю функціонування в реальному часі.
5. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що згруповані в кластери кінцеві контрольовані пристрої виконані з можливістю їх довільного пересування у межах кластера з використанням динамічної маршрутизації у мережі кластера та уніфікованого протоколу передачі команд, підтримуючого динамічну маршрутизацію.
Текст
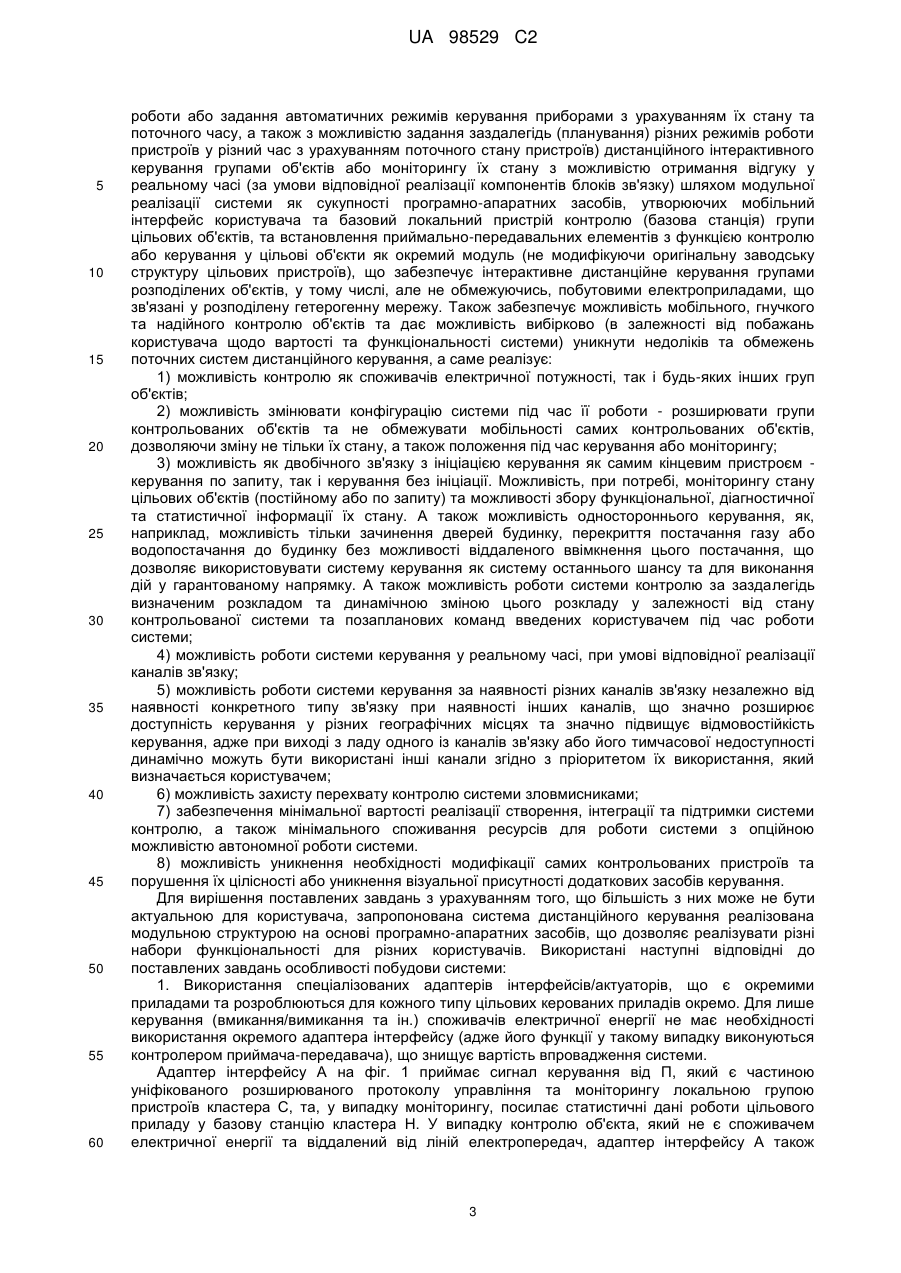
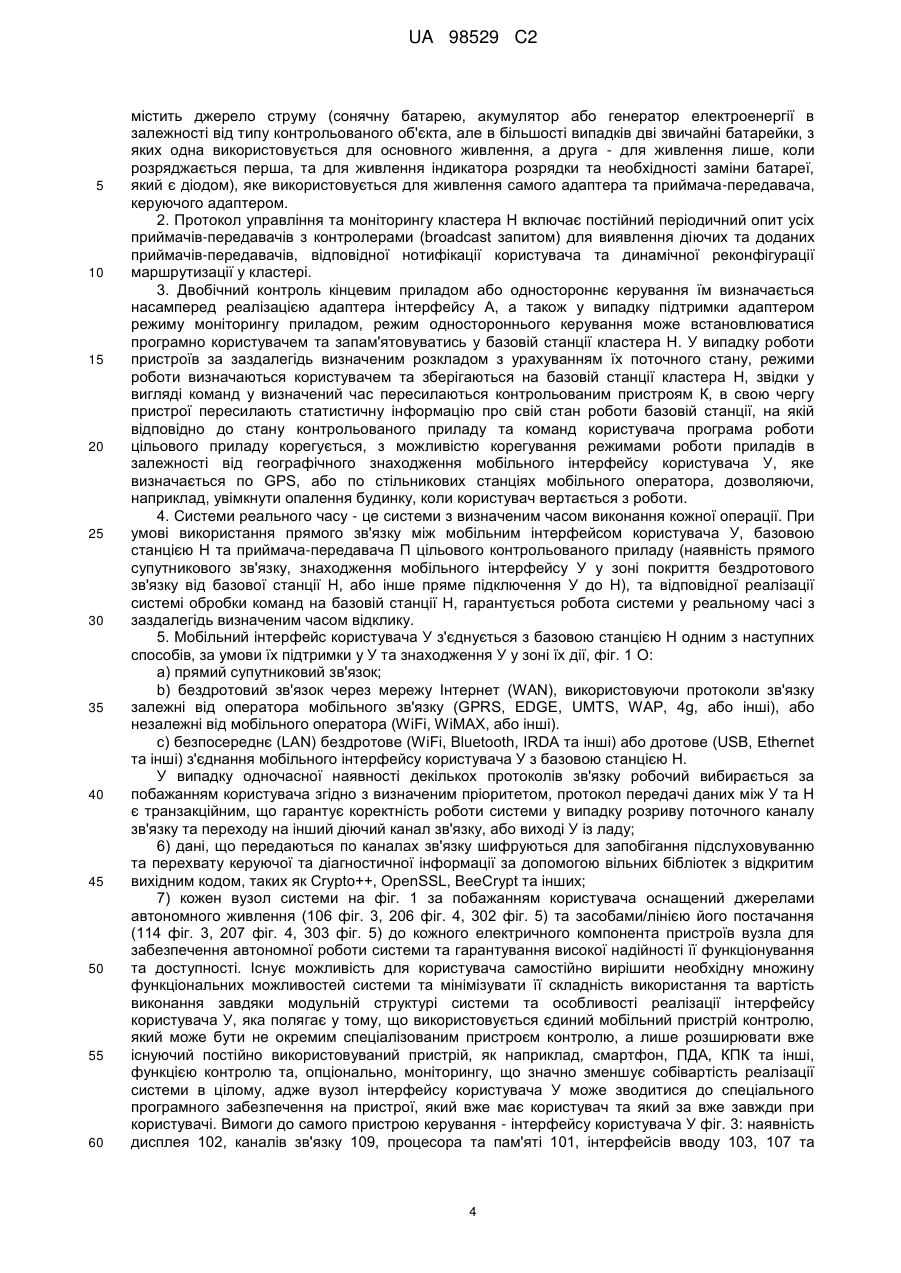
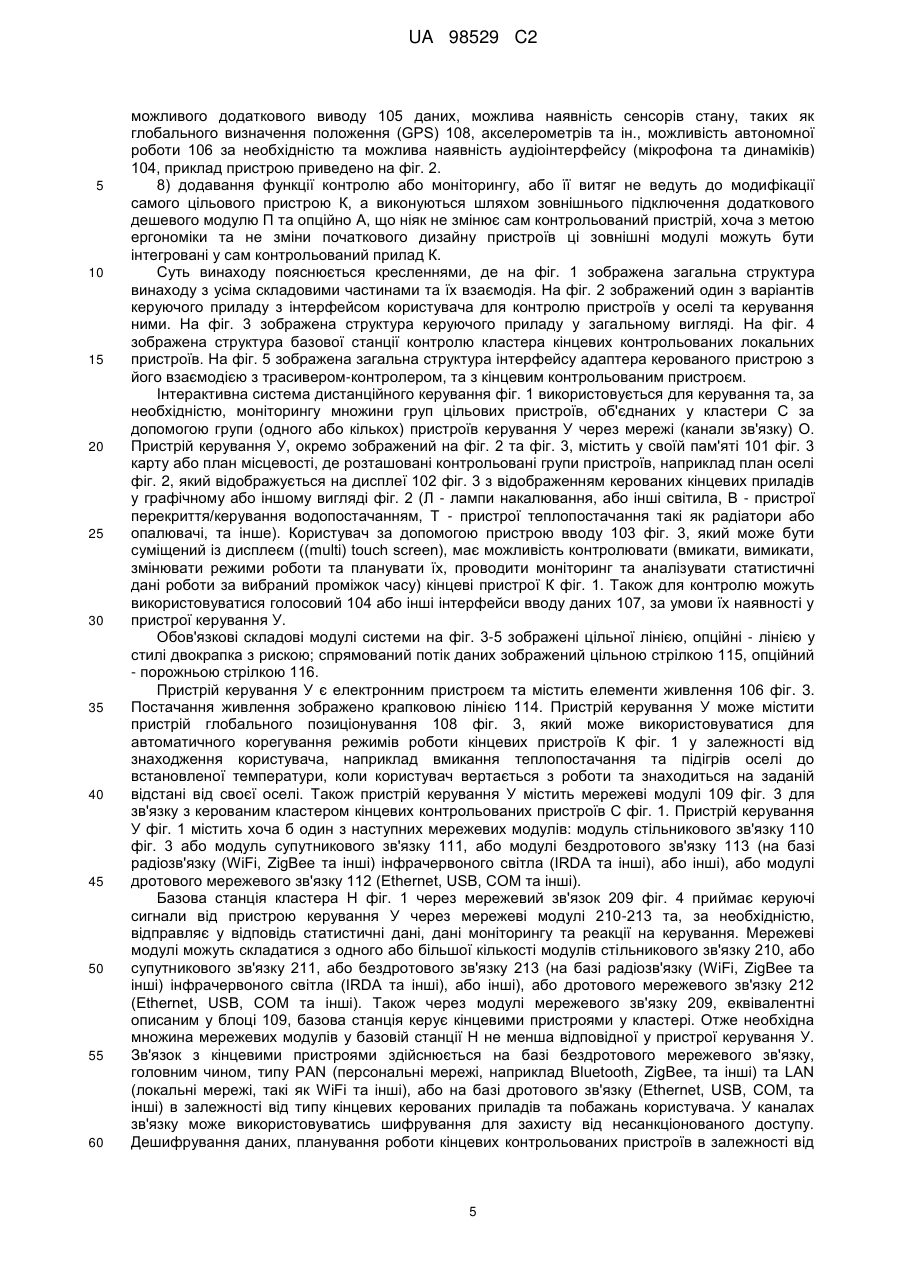
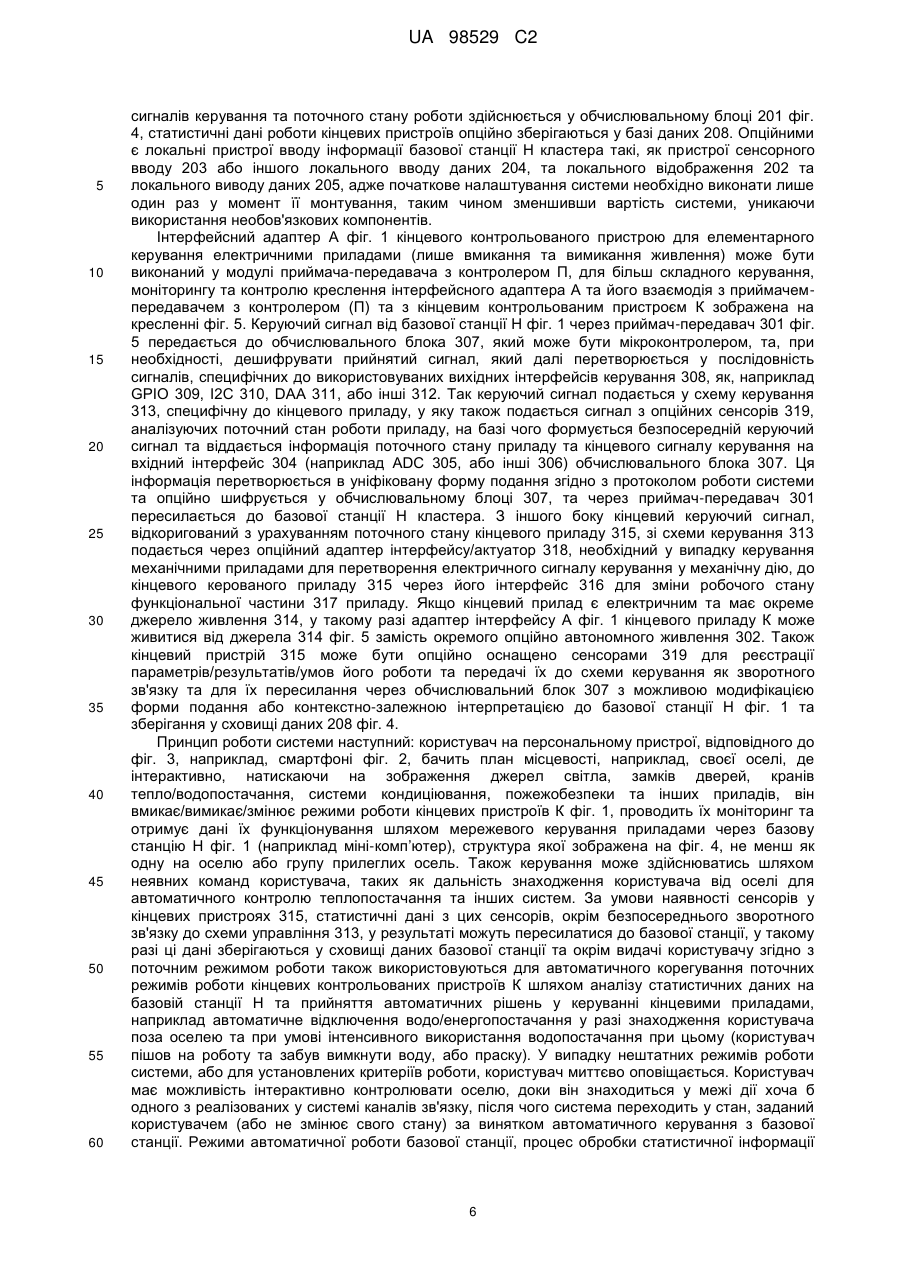
Реферат: Винахід належить до галузі регулювання та керування і може бути використаний для дистанційного інтерактивного керування та моніторингу розподілених груп об'єктів, таких як пристрої освітлювання, системи опалення тощо. Інтерактивна система містить щонайменше один прилад керування (У), зв'язаний з одним або множиною кінцевих контрольованих пристроїв (К), які згруповані у кластери відповідно до географічного положення. Кожний кластер складається з базової станції (Н) та щонайменше одного кінцевого контрольованого пристрою (К), які зв'язані каналами зв'язку через мережу приймачів-передавачів з контролерами (П) та з можливістю підключення адаптера інтерфейсу (А) до кінцевого контрольованого пристрою. Адаптер інтерфейсу містить сенсори для моніторингу роботи кінцевого контрольованого пристрою (К). Прилади керування (У) є персональними пристроями користувачів загального призначення, такими як смартфони тощо, містять обчислювальний пристрій з пам'яттю (101), такий як мікроконтролер, зв'язаний з мережевими та локальними інтерфейсами вводу-виводу (102-105, 107-109) і джерелом живлення (106). Базова станція (Н) кластера є міні/мікрокомп'ютером та містить щонайменше один обчислювальний пристрій з пам'яттю (201), такий як мікроконтролер, зв'язаний з мережевими та локальними інтерфейсами вводу-виводу (202-205, 208, 209) і джерелом живлення (206). Адаптер інтерфейсу (А) виконаний з можливістю перетворення команд/сигналів керування від базової станції (Н) у відповідний до кінцевого контрольованого пристрою вид керування і монтується усередині або зовні кінцевого контрольованого пристрою. Система забезпечує підвищення надійності та якості керування і контролю об'єктів. UA 98529 C2 (12) UA 98529 C2 UA 98529 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до систем дистанційного інтерактивного керування та моніторингу розподілених груп об'єктів, які можуть бути як споживачами електричної потужності як, наприклад, пристрої освітлювання приміщень, так і окремими автономними системами, як, наприклад, система опалення будинку, з можливістю роботи системи у реальному часі та автоматичного контролювання об'єктів за заздалегідь визначеним розкладом та з урахуванням їх поточного стану. Також запропонований винахід може бути використаний для аварійного вимикання пристроїв, як, наприклад, вимикання постачання електроенергії до праски або вимикання постачання газу до газової плити. При цьому кількість та розміщення пристроїв керування може змінюватися у процесі роботи керованої системи, а сам інтерфейс керування захищений від прослуховування та перехоплення управління зловмисниками. Відомі системи дистанційного керування, більшість яких має апаратну реалізацію та не дозволяють модульного розширення системи під час її роботи, а також мають обмежені функції керування заздалегідь визначених параметрів цільових об'єктів без можливості планування та автоматизації режимів керування та, у більшості випадків, без можливості отримання відгуку та моніторингу стану працюючої системи (RU 2262216 С1, заявка 2004112488/28 від 23.04.2004), або мають обмежену відстань для дистанційного керування, бо пристрій керування є статичною системою, або невід'ємною частиною (UA 76280 С2, заявка № 20040705814 від 15.01.2003). Взагалі системи дистанційного керування поділяються на системи бездротового та дротового дистанційного керування. Системи дротового керування зазвичай використовують вже існуючі лінії передачі такі як електромережі та телефонні лінії та потенційно більш захищені від несанкційованого перехвату контролю зловмисниками, але з іншого боку такі системи обмежують можливість зміни місць розташування та, часто, кількості контрольованих об'єктів та менш надійні, адже при пошкодженні магістрального каналу зв'язку, який часто може бути одним дротом, можна втратити можливість керування. Більшість систем дистанційного керування спеціалізовані для контролю однорідних систем спеціального призначення та не можуть використовуватися у інших системах або навіть подібних, але з іншою структурою контрольованих об'єктів (UA 30470 С2, заявка № 98052441 від 13.05.1998). Також у більшості систем дистанційного керування не передбачено можливість зміни положення або кількості пристроїв керування, або зміну способу зв'язку між пристроєм керування некерованим об'єктом (UA 27416 С2, заявка № 94005427 від 01.10.1992). Також існують комплексні системи керування побутовими системами, як, наприклад, системи типу «Розумний будинок» (SBB Smart House, http://sbb.com.ua), але системи цього типу мають високу вартість реалізації, спеціалізовані на керування заздалегідь визначеними підсистемами, не дозволяють керувати за межами будинку або роблять у неінтерактивному режимі, що не дає можливість користувачу у реальному часі контролювати або керувати кожним цільовим об'єктом, використовуючи єдиний компактний пристрій керування. Також існують системи диспетчерського керування побутовими електричними навантаженнями (ЕР-А-0620631), які мають центральний блок, який приводить в дію безліч електроприладів закодованими сигналами, забезпечуючи їх роботу в запрограмованій послідовності, але у цій системі кожен електроприлад містить центральний процесор, що робить високу вартість реалізації такої системи, збільшує споживання електроенергії та не дає можливості контролювати не спеціалізовані або не спеціально модифіковані (шляхом додавання конструктивних елементів, змінюючи функціональність та початковий, розроблений виробником, дизайн) пристрої. Найбільш близькими є три існуючі винаходи: 1. «Система здійснення поточного контролю та керування множиною побутових електроприладів», що належить до області електротехніки та може бути використана у системі для здійснення поточного контролю та керування одним або більшої множинної споживачів електричної потужності (RU 2264020 С2, заявка № 2002109472/09, від 01.02.2000). У цій системі згідно з формулою, (пункт 1) «приймально-передавальні засоби входять до складу конструктивного елемента одного із зазначених споживачів електричної потужності і спільно використовують одне з інтерфейсних засобів, пов'язане із зазначеним споживачем електричної потужності». Отже у цій системі не має можливості контролю пристроїв, які не є споживачами електричної потужності, як, наприклад система опалення будинку. Також згідно з формулою системи, (пункт 10) «зазначені передавальні-приймальні засоби містять засоби постійної пам'яті, пристосовані для зберігання інформації, що вводиться системами керування споживачів електричної потужності в першій мережі», отже передавально-приймальні засоби споживають чимало електроенергії та мають нетривіальну реалізацію, адже мають не тільки приймальнопередавальні функції, а ще й повинні вміти записувати, зчитувати та обробляти інформацію із засобів постійної пам'яті, отриману від системи керування, отже повинні мати як мінімум процесор (що конвертує збережену інформацію від систем керування у послідовність інструкцій 1 UA 98529 C2 5 10 15 20 25 30 35 40 45 50 55 60 до кінцевого інтерфейсу приладу) та зовнішній інтерфейс роботи з цією пам'яттю, що робить реалізацію, використання та встановлення системи нетривіальним та саму систему ненадійною, адже помилково можна записати до пам'яті пристроїв інформацію, що призведе до некоректної роботи пристрою, адже є можливість записати до пам'яті будь-що. Згідно з описом системи, усі контрольовані прибори зв'язані магістральною лінією електроживлення, що виключає можливість довільного переміщення пристроїв під час роботи системи. Згідно з описом системи «встановлення зв'язку з зовнішньої апаратурою, яка утворює основу WRAP-протоколу, дозволяють побутовому електроприладу реалізовувати його здатність з'єднуватися з локальною мережею RE і можливість доступу до мережі Інтернет за допомогою будь-якого міжмережевого інтерфейсу, здатного керувати протоколом TCP/IP», але доступ самого приладу до мережі Інтернет є небезпечним та потребує спеціальної складової апаратури у кожному такому побутовому пристрої, що веде до високої вартості реалізації системи та великого ризику виводу її із ладу зловмисниками із мережі Інтернет. 2. «Механізм нотифікації у реальному часі для моніторингу та керування локальним майном через бездротові та інтернет-технології» ("Real-time alert mechanism for monitoring and controlling field assets via wireless and internet technologies", US 6,925,335 B2 від 02.08.2005, заявка № 09/899,527 від 05.07.2001), що належить до систем для моніторингу у реальному часі та контролю пристроїв за допомогою бездротових та інтернет-технологій. Згідно з описом системи пристрій моніторингу взаємодіє з цільовим пристроєм головним чином для виявлення помилкових станів у цільовому пристрої та, у такому разі, ініціювання послідовностей, що коригують, для виправлення помилкових станів. У альтернативі пристрій моніторингу може повідомляти мережевий операційний центр через бездротовий зв'язок, таким чином, користувач може переглянути стан цільових пристроїв та запустити команди, що коригують, при необхідності, або виконати інші дії. Отже, згідно з описом системи, контроль цільових пристроїв ініціюється їх станом та проводиться у результаті аналізу поточного стану пристроїв, що потребує наявності допоміжної апаратури для зняття діагностичної інформації та станів роботи цільових пристроїв, що потребує інтеграції у сам цільовий пристрій та модифікації (доповнення) його структури. Також ця методологія не включає можливість примусового односпрямованого керування пристроями, які не мають діагностичної інформації, наприклад примусове перекриття газопостачання, або водопостачання у будинок. Згідно з пунктом 1 формули системи: «Апаратура контролю торгового автомата включає: ... програму інструкцій для самостійного виправлення хоча б одного помилкового стану торгового автомата... та можливості передачі інформації про невиправлені стани до операційного мережевого центру через бездротовий зв'язок, та отримання команд для виправлення хоча б одного невиправленого стану торгового автомата». Отже ця система спеціалізована для моніторингу роботи торгових автоматів та виправлення їх помилкових станів у реальному часі, та не призначена для застосування до контролю довільних приладів, без ініціалізації контролю з боку цільових приладів. 3. «Система повсюдного зв'язку та керування віддалених місць» ("Ubiquitous connectivity and control system for remote locations", US 7,257,397 B2 від 14.08.2007, заявка № 11/163,372 від 17.10.2005), що належить до систем двобічного зв'язку за запитом між віддаленою точкою доступу та багатофункціональним базовим пристроєм керування у географічно віддаленому місці. У цій системі користувач має можливість по запиту проводити моніторинг та контроль множини віддалених пристроїв, як, наприклад, систем підтримки температури, кондиціювання, системи безпеки будинку та інших шляхом відправлення командних SMS повідомлень та отримання відповідних відгуків. Згідно з пунктом 1 формули системи та її опису, комунікація між віддаленим пристроєм контролю та контрольованою структурою відбувається у рамках керування на нотифікації через командні SMS повідомлення, що дуже обмежує можливості моніторингу та контролю тим, що по-перше таким чином можна проводити тільки керування/моніторинг по запиту, а не у режимі реального часу, по-друге якість роботи системи цілком залежить від якості послуг мобільного оператора, та згідно зі стандартом SMS, оператор взагалі не гарантує доставку SMS (що може відбутися у моменти пікового навантаження на системи оператора мобільного зв'язку під час свят, як, наприклад, Новий рік, Різдво та ін.), що робить систему контролю ненадійною, отже не застосовною для контролю стратегічних, важливих або небезпечних об'єктів, стан яких треба контролювати постійно. По-третє єдиний протокол зв'язку (командні SMS) дуже обмежує область можливості використання системи, адже у багатьох місцях не має стільникового зв'язку, у деяких його спеціально заблоковано, але доступні інші системи комунікацій, які, потенційно могли би бути використані для постійного зв'язку з об'єктом що контролюється, але не через послуги стільникового зв'язку. В основу винаходу поставлена задача створення системи гнучкого (можливість керування параметрами роботи цільових пристроїв шляхом безпосереднього задання параметрів їх 2 UA 98529 C2 5 10 15 20 25 30 35 40 45 50 55 60 роботи або задання автоматичних режимів керування приборами з урахуванням їх стану та поточного часу, а також з можливістю задання заздалегідь (планування) різних режимів роботи пристроїв у різний час з урахуванням поточного стану пристроїв) дистанційного інтерактивного керування групами об'єктів або моніторингу їх стану з можливістю отримання відгуку у реальному часі (за умови відповідної реалізації компонентів блоків зв'язку) шляхом модульної реалізації системи як сукупності програмно-апаратних засобів, утворюючих мобільний інтерфейс користувача та базовий локальний пристрій контролю (базова станція) групи цільових об'єктів, та встановлення приймально-передавальних елементів з функцією контролю або керування у цільові об'єкти як окремий модуль (не модифікуючи оригінальну заводську структуру цільових пристроїв), що забезпечує інтерактивне дистанційне керування групами розподілених об'єктів, у тому числі, але не обмежуючись, побутовими електроприладами, що зв'язані у розподілену гетерогенну мережу. Також забезпечує можливість мобільного, гнучкого та надійного контролю об'єктів та дає можливість вибірково (в залежності від побажань користувача щодо вартості та функціональності системи) уникнути недоліків та обмежень поточних систем дистанційного керування, а саме реалізує: 1) можливість контролю як споживачів електричної потужності, так і будь-яких інших груп об'єктів; 2) можливість змінювати конфігурацію системи під час її роботи - розширювати групи контрольованих об'єктів та не обмежувати мобільності самих контрольованих об'єктів, дозволяючи зміну не тільки їх стану, а також положення під час керування або моніторингу; 3) можливість як двобічного зв'язку з ініціацією керування як самим кінцевим пристроєм керування по запиту, так і керування без ініціації. Можливість, при потребі, моніторингу стану цільових об'єктів (постійному або по запиту) та можливості збору функціональної, діагностичної та статистичної інформації їх стану. А також можливість одностороннього керування, як, наприклад, можливість тільки зачинення дверей будинку, перекриття постачання газу або водопостачання до будинку без можливості віддаленого ввімкнення цього постачання, що дозволяє використовувати систему керування як систему останнього шансу та для виконання дій у гарантованому напрямку. А також можливість роботи системи контролю за заздалегідь визначеним розкладом та динамічною зміною цього розкладу у залежності від стану контрольованої системи та позапланових команд введених користувачем під час роботи системи; 4) можливість роботи системи керування у реальному часі, при умові відповідної реалізації каналів зв'язку; 5) можливість роботи системи керування за наявності різних каналів зв'язку незалежно від наявності конкретного типу зв'язку при наявності інших каналів, що значно розширює доступність керування у різних географічних місцях та значно підвищує відмовостійкість керування, адже при виході з ладу одного із каналів зв'язку або його тимчасової недоступності динамічно можуть бути використані інші канали згідно з пріоритетом їх використання, який визначається користувачем; 6) можливість захисту перехвату контролю системи зловмисниками; 7) забезпечення мінімальної вартості реалізації створення, інтеграції та підтримки системи контролю, а також мінімального споживання ресурсів для роботи системи з опційною можливістю автономної роботи системи. 8) можливість уникнення необхідності модифікації самих контрольованих пристроїв та порушення їх цілісності або уникнення візуальної присутності додаткових засобів керування. Для вирішення поставлених завдань з урахуванням того, що більшість з них може не бути актуальною для користувача, запропонована система дистанційного керування реалізована модульною структурою на основі програмно-апаратних засобів, що дозволяє реалізувати різні набори функціональності для різних користувачів. Використані наступні відповідні до поставлених завдань особливості побудови системи: 1. Використання спеціалізованих адаптерів інтерфейсів/актуаторів, що є окремими приладами та розроблюються для кожного типу цільових керованих приладів окремо. Для лише керування (вмикання/вимикання та ін.) споживачів електричної енергії не має необхідності використання окремого адаптера інтерфейсу (адже його функції у такому випадку виконуються контролером приймача-передавача), що знищує вартість впровадження системи. Адаптер інтерфейсу А на фіг. 1 приймає сигнал керування від П, який є частиною уніфікованого розширюваного протоколу управління та моніторингу локальною групою пристроїв кластера С, та, у випадку моніторингу, посилає статистичні дані роботи цільового приладу у базову станцію кластера Н. У випадку контролю об'єкта, який не є споживачем електричної енергії та віддалений від ліній електропередач, адаптер інтерфейсу А також 3 UA 98529 C2 5 10 15 20 25 30 35 40 45 50 55 60 містить джерело струму (сонячну батарею, акумулятор або генератор електроенергії в залежності від типу контрольованого об'єкта, але в більшості випадків дві звичайні батарейки, з яких одна використовується для основного живлення, а друга - для живлення лише, коли розряджається перша, та для живлення індикатора розрядки та необхідності заміни батареї, який є діодом), яке використовується для живлення самого адаптера та приймача-передавача, керуючого адаптером. 2. Протокол управління та моніторингу кластера Η включає постійний періодичний опит усіх приймачів-передавачів з контролерами (broadcast запитом) для виявлення діючих та доданих приймачів-передавачів, відповідної нотифікації користувача та динамічної реконфігурації маршрутизації у кластері. 3. Двобічний контроль кінцевим приладом або одностороннє керування їм визначається насамперед реалізацією адаптера інтерфейсу А, а також у випадку підтримки адаптером режиму моніторингу приладом, режим одностороннього керування може встановлюватися програмно користувачем та запам'ятовуватись у базовій станції кластера Н. У випадку роботи пристроїв за заздалегідь визначеним розкладом з урахуванням їх поточного стану, режими роботи визначаються користувачем та зберігаються на базовій станції кластера Н, звідки у вигляді команд у визначений час пересилаються контрольованим пристроям К, в свою чергу пристрої пересилають статистичну інформацію про свій стан роботи базовій станції, на якій відповідно до стану контрольованого приладу та команд користувача програма роботи цільового приладу корегується, з можливістю корегування режимами роботи приладів в залежності від географічного знаходження мобільного інтерфейсу користувача У, яке визначається по GPS, або по стільникових станціях мобільного оператора, дозволяючи, наприклад, увімкнути опалення будинку, коли користувач вертається з роботи. 4. Системи реального часу - це системи з визначеним часом виконання кожної операції. При умові використання прямого зв'язку між мобільним інтерфейсом користувача У, базовою станцією Η та приймача-передавача Π цільового контрольованого приладу (наявність прямого супутникового зв'язку, знаходження мобільного інтерфейсу У у зоні покриття бездротового зв'язку від базової станції Н, або інше пряме підключення У до Н), та відповідної реалізації системі обробки команд на базовій станції Н, гарантується робота системи у реальному часі з заздалегідь визначеним часом відклику. 5. Мобільний інтерфейс користувача У з'єднується з базовою станцією Η одним з наступних способів, за умови їх підтримки у У та знаходження У у зоні їх дії, фіг. 1 O: a) прямий супутниковий зв'язок; b) бездротовий зв'язок через мережу Інтернет (WAN), використовуючи протоколи зв'язку залежні від оператора мобільного зв'язку (GPRS, EDGE, UMTS, WAP, 4g, або інші), або незалежні від мобільного оператора (WiFi, WiMAX, або інші). с) безпосереднє (LAN) бездротове (WiFi, Bluetooth, IRDA та інші) або дротове (USB, Ethernet та інші) з'єднання мобільного інтерфейсу користувача У з базовою станцією Н. У випадку одночасної наявності декількох протоколів зв'язку робочий вибирається за побажанням користувача згідно з визначеним пріоритетом, протокол передачі даних між У та Η є транзакційним, що гарантує коректність роботи системи у випадку розриву поточного каналу зв'язку та переходу на інший діючий канал зв'язку, або виході У із ладу; 6) дані, що передаються по каналах зв'язку шифруються для запобігання підслуховуванню та перехвату керуючої та діагностичної інформації за допомогою вільних бібліотек з відкритим вихідним кодом, таких як Crypto++, OpenSSL, BeeCrypt та інших; 7) кожен вузол системи на фіг. 1 за побажанням користувача оснащений джерелами автономного живлення (106 фіг. 3, 206 фіг. 4, 302 фіг. 5) та засобами/лінією його постачання (114 фіг. 3, 207 фіг. 4, 303 фіг. 5) до кожного електричного компонента пристроїв вузла для забезпечення автономної роботи системи та гарантування високої надійності її функціонування та доступності. Існує можливість для користувача самостійно вирішити необхідну множину функціональних можливостей системи та мінімізувати її складність використання та вартість виконання завдяки модульній структурі системи та особливості реалізації інтерфейсу користувача У, яка полягає у тому, що використовується єдиний мобільний пристрій контролю, який може бути не окремим спеціалізованим пристроєм контролю, а лише розширювати вже існуючий постійно використовуваний пристрій, як наприклад, смартфон, ПДА, КПК та інші, функцією контролю та, опціонально, моніторингу, що значно зменшує собівартість реалізації системи в цілому, адже вузол інтерфейсу користувача У може зводитися до спеціального програмного забезпечення на пристрої, який вже має користувач та який за вже завжди при користувачі. Вимоги до самого пристрою керування - інтерфейсу користувача У фіг. 3: наявність дисплея 102, каналів зв'язку 109, процесора та пам'яті 101, інтерфейсів вводу 103, 107 та 4 UA 98529 C2 5 10 15 20 25 30 35 40 45 50 55 60 можливого додаткового виводу 105 даних, можлива наявність сенсорів стану, таких як глобального визначення положення (GPS) 108, акселерометрів та ін., можливість автономної роботи 106 за необхідністю та можлива наявність аудіоінтерфейсу (мікрофона та динаміків) 104, приклад пристрою приведено на фіг. 2. 8) додавання функції контролю або моніторингу, або її витяг не ведуть до модифікації самого цільового пристрою К, а виконуються шляхом зовнішнього підключення додаткового дешевого модулю Π та опційно А, що ніяк не змінює сам контрольований пристрій, хоча з метою ергономіки та не зміни початкового дизайну пристроїв ці зовнішні модулі можуть бути інтегровані у сам контрольований прилад К. Суть винаходу пояснюється кресленнями, де на фіг. 1 зображена загальна структура винаходу з усіма складовими частинами та їх взаємодія. На фіг. 2 зображений один з варіантів керуючого приладу з інтерфейсом користувача для контролю пристроїв у оселі та керування ними. На фіг. 3 зображена структура керуючого приладу у загальному вигляді. На фіг. 4 зображена структура базової станції контролю кластера кінцевих контрольованих локальних пристроїв. На фіг. 5 зображена загальна структура інтерфейсу адаптера керованого пристрою з його взаємодією з трасивером-контролером, та з кінцевим контрольованим пристроєм. Інтерактивна система дистанційного керування фіг. 1 використовується для керування та, за необхідністю, моніторингу множини груп цільових пристроїв, об'єднаних у кластери С за допомогою групи (одного або кількох) пристроїв керування У через мережі (канали зв'язку) О. Пристрій керування У, окремо зображений на фіг. 2 та фіг. 3, містить у своїй пам'яті 101 фіг. 3 карту або план місцевості, де розташовані контрольовані групи пристроїв, наприклад план оселі фіг. 2, який відображується на дисплеї 102 фіг. 3 з відображенням керованих кінцевих приладів у графічному або іншому вигляді фіг. 2 (Л - лампи накалювання, або інші світила, В - пристрої перекриття/керування водопостачанням, Τ - пристрої теплопостачання такі як радіатори або опалювачі, та інше). Користувач за допомогою пристрою вводу 103 фіг. 3, який може бути суміщений із дисплеєм ((multi) touch screen), має можливість контролювати (вмикати, вимикати, змінювати режими роботи та планувати їх, проводити моніторинг та аналізувати статистичні дані роботи за вибраний проміжок часу) кінцеві пристрої К фіг. 1. Також для контролю можуть використовуватися голосовий 104 або інші інтерфейси вводу даних 107, за умови їх наявності у пристрої керування У. Обов'язкові складові модулі системи на фіг. 3-5 зображені цільної лінією, опційні - лінією у стилі двокрапка з рискою; спрямований потік даних зображений цільною стрілкою 115, опційний - порожньою стрілкою 116. Пристрій керування У є електронним пристроєм та містить елементи живлення 106 фіг. 3. Постачання живлення зображено крапковою лінією 114. Пристрій керування У може містити пристрій глобального позиціонування 108 фіг. 3, який може використовуватися для автоматичного корегування режимів роботи кінцевих пристроїв К фіг. 1 у залежності від знаходження користувача, наприклад вмикання теплопостачання та підігрів оселі до встановленої температури, коли користувач вертається з роботи та знаходиться на заданій відстані від своєї оселі. Також пристрій керування У містить мережеві модулі 109 фіг. 3 для зв'язку з керованим кластером кінцевих контрольованих пристроїв С фіг. 1. Пристрій керування У фіг. 1 містить хоча б один з наступних мережевих модулів: модуль стільникового зв'язку 110 фіг. 3 або модуль супутникового зв'язку 111, або модулі бездротового зв'язку 113 (на базі радіозв'язку (WiFi, ZigBee та інші) інфрачервоного світла (IRDA та інші), або інші), або модулі дротового мережевого зв'язку 112 (Ethernet, USB, COM та інші). Базова станція кластера Η фіг. 1 через мережевий зв'язок 209 фіг. 4 приймає керуючі сигнали від пристрою керування У через мережеві модулі 210-213 та, за необхідністю, відправляє у відповідь статистичні дані, дані моніторингу та реакції на керування. Мережеві модулі можуть складатися з одного або більшої кількості модулів стільникового зв'язку 210, або супутникового зв'язку 211, або бездротового зв'язку 213 (на базі радіозв'язку (WiFi, ZigBee та інші) інфрачервоного світла (IRDA та інші), або інші), або дротового мережевого зв'язку 212 (Ethernet, USB, COM та інші). Також через модулі мережевого зв'язку 209, еквівалентні описаним у блоці 109, базова станція керує кінцевими пристроями у кластері. Отже необхідна множина мережевих модулів у базовій станції Η не менша відповідної у пристрої керування У. Зв'язок з кінцевими пристроями здійснюється на базі бездротового мережевого зв'язку, головним чином, типу PAN (персональні мережі, наприклад Bluetooth, ZigBee, та інші) та LAN (локальні мережі, такі як WiFi та інші), або на базі дротового зв'язку (Ethernet, USB, COM, та інші) в залежності від типу кінцевих керованих приладів та побажань користувача. У каналах зв'язку може використовуватись шифрування для захисту від несанкціонованого доступу. Дешифрування даних, планування роботи кінцевих контрольованих пристроїв в залежності від 5 UA 98529 C2 5 10 15 20 25 30 35 40 45 50 55 60 сигналів керування та поточного стану роботи здійснюється у обчислювальному блоці 201 фіг. 4, статистичні дані роботи кінцевих пристроїв опційно зберігаються у базі даних 208. Опційними є локальні пристрої вводу інформації базової станції Η кластера такі, як пристрої сенсорного вводу 203 або іншого локального вводу даних 204, та локального відображення 202 та локального виводу даних 205, адже початкове налаштування системи необхідно виконати лише один раз у момент її монтування, таким чином зменшивши вартість системи, уникаючи використання необов'язкових компонентів. Інтерфейсний адаптер А фіг. 1 кінцевого контрольованого пристрою для елементарного керування електричними приладами (лише вмикання та вимикання живлення) може бути виконаний у модулі приймача-передавача з контролером П, для більш складного керування, моніторингу та контролю креслення інтерфейсного адаптера А та його взаємодія з приймачемпередавачем з контролером (П) та з кінцевим контрольованим пристроєм К зображена на кресленні фіг. 5. Керуючий сигнал від базової станції Η фіг. 1 через приймач-передавач 301 фіг. 5 передається до обчислювального блока 307, який може бути мікроконтролером, та, при необхідності, дешифрувати прийнятий сигнал, який далі перетворюється у послідовність сигналів, специфічних до використовуваних вихідних інтерфейсів керування 308, як, наприклад GPIO 309, І2С 310, DAA 311, або інші 312. Так керуючий сигнал подається у схему керування 313, специфічну до кінцевого приладу, у яку також подається сигнал з опційних сенсорів 319, аналізуючих поточний стан роботи приладу, на базі чого формується безпосередній керуючий сигнал та віддається інформація поточного стану приладу та кінцевого сигналу керування на вхідний інтерфейс 304 (наприклад ADC 305, або інші 306) обчислювального блока 307. Ця інформація перетворюється в уніфіковану форму подання згідно з протоколом роботи системи та опційно шифрується у обчислювальному блоці 307, та через приймач-передавач 301 пересилається до базової станції Η кластера. З іншого боку кінцевий керуючий сигнал, відкоригований з урахуванням поточного стану кінцевого приладу 315, зі схеми керування 313 подається через опційний адаптер інтерфейсу/актуатор 318, необхідний у випадку керування механічними приладами для перетворення електричного сигналу керування у механічну дію, до кінцевого керованого приладу 315 через його інтерфейс 316 для зміни робочого стану функціональної частини 317 приладу. Якщо кінцевий прилад є електричним та має окреме джерело живлення 314, у такому разі адаптер інтерфейсу А фіг. 1 кінцевого приладу К може живитися від джерела 314 фіг. 5 замість окремого опційно автономного живлення 302. Також кінцевий пристрій 315 може бути опційно оснащено сенсорами 319 для реєстрації параметрів/результатів/умов його роботи та передачі їх до схеми керування як зворотного зв'язку та для їх пересилання через обчислювальний блок 307 з можливою модифікацією форми подання або контекстно-залежною інтерпретацією до базової станції Η фіг. 1 та зберігання у сховищі даних 208 фіг. 4. Принцип роботи системи наступний: користувач на персональному пристрої, відповідного до фіг. 3, наприклад, смартфоні фіг. 2, бачить план місцевості, наприклад, своєї оселі, де інтерактивно, натискаючи на зображення джерел світла, замків дверей, кранів тепло/водопостачання, системи кондиціювання, пожежобезпеки та інших приладів, він вмикає/вимикає/змінює режими роботи кінцевих пристроїв К фіг. 1, проводить їх моніторинг та отримує дані їх функціонування шляхом мережевого керування приладами через базову станцію Η фіг. 1 (наприклад міні-комп’ютер), структура якої зображена на фіг. 4, не менш як одну на оселю або групу прилеглих осель. Також керування може здійснюватись шляхом неявних команд користувача, таких як дальність знаходження користувача від оселі для автоматичного контролю теплопостачання та інших систем. За умови наявності сенсорів у кінцевих пристроях 315, статистичні дані з цих сенсорів, окрім безпосереднього зворотного зв'язку до схеми управління 313, у результаті можуть пересилатися до базової станції, у такому разі ці дані зберігаються у сховищі даних базової станції та окрім видачі користувачу згідно з поточним режимом роботи також використовуються для автоматичного корегування поточних режимів роботи кінцевих контрольованих пристроїв К шляхом аналізу статистичних даних на базовій станції Η та прийняття автоматичних рішень у керуванні кінцевими приладами, наприклад автоматичне відключення водо/енергопостачання у разі знаходження користувача поза оселею та при умові інтенсивного використання водопостачання при цьому (користувач пішов на роботу та забув вимкнути воду, або праску). У випадку нештатних режимів роботи системи, або для установлених критеріїв роботи, користувач миттєво оповіщається. Користувач має можливість інтерактивно контролювати оселю, доки він знаходиться у межі дії хоча б одного з реалізованих у системі каналів зв'язку, після чого система переходить у стан, заданий користувачем (або не змінює свого стану) за винятком автоматичного керування з базової станції. Режими автоматичної роботи базової станції, процес обробки статистичної інформації 6 UA 98529 C2 5 10 15 20 25 30 35 40 45 50 55 60 та обробки сигналів від користувача та приладів реалізуються програмним забезпеченням базової станції, реалізованому програмою рівня ядра вбудованої операційної системи (звичайно створюється на мовах системного програмування таких як С або низького рівня як ASM), або програмою рівня користувача, яка, з урахуванням специфіки роботи базової станції та її обладнання також може бути створена на мовах системного програмування високого рівня як C++, або на ресурсозберігаючих кросплатформових засобах як Java Embedded. Базова станція відправляє дані роботи пристроїв користувачу тільки за умови активної сесії, ініційованої користувачем для відображення стану роботи системи, або за умови нештатних ситуацій або заданих користувачем сповіщальних режимів роботи, у випадку чого базова станція може ініціювати сесії з користувачем для відповідного інформування користувача для можливого додаткового корегування роботи системи. Приклад базової реалізації системи: можна використати смартфон з ОС Android та спеціальним клієнтським ПО користувача як пристроєм керування, який посилає керуючий сигнал до базової станції, наприклад Beagleboard C4 з WiFi dongle, через WiFi, далі керуючий сигнал передається через підключені до базової станції та кінцевої схеми керування світлом (наприклад реле) приймачі-передавачі з суміщеним програмованим мікроконтролером від Texas Instruments. Тоді ПО базової станції та клієнтське ПО можуть бути розроблені на Java, за умови встановлення Java Embedded на базову станцію. ФОРМУЛА ВИНАХОДУ 1. Інтерактивна система дистанційного керування об'єктами, що містить щонайменше один прилад керування (У), зв'язаний з одним або множиною кінцевих контрольованих пристроїв (К), які згруповані у кластери відповідно до географічного положення, кожний кластер складається з базової станції (Н) та щонайменше одного кінцевого контрольованого пристрою (К), які зв'язані каналами зв'язку через мережу приймачів-передавачів з контролерами (П) та з можливістю підключення адаптера інтерфейсу (А) до кінцевого контрольованого пристрою, яка відрізняється тим, що адаптер інтерфейсу виконаний з можливістю безпосереднього керування кінцевим контрольованим пристроєм та містить сенсори для моніторингу роботи кінцевого контрольованого пристрою (К) та відправки статистичних даних роботи кінцевого контрольованого пристрою (К) до базової станції (Н) кластера через мережу приймачівпередавачів з контролерами (П), а прилади керування (У) є персональними пристроями користувачів загального призначення, такими як смартфони тощо, що містять обчислювальний пристрій з пам'яттю (101), такий як мікроконтролер, зв'язаний з мережевими та локальними інтерфейсами вводу-виводу (102-105, 107-109) і джерелом живлення (106) та виконаний з можливістю програмного розширення функцій керування та моніторингу кінцевих контрольованих пристроїв (К) через мережевий зв'язок з базовою станцією (Н) кластера, яка є міні/мікрокомп'ютером та містить щонайменше один обчислювальний пристрій з пам'яттю (201), такий як мікроконтролер, зв'язаний з мережевими та локальними інтерфейсами вводу-виводу (202-205, 208, 209) і джерелом живлення (206), станція (Н) виконана з можливістю передачі даних моніторингу та відгуків на керування до приладів керування (У) та команд/сигналів керування по локальній мережі кластера через приймачі-передавачі з контролерами (П) до кінцевого контрольованого пристрою (К), при цьому адаптер інтерфейсу (А) виконаний з можливістю перетворення команд/сигналів керування від базової станції (Н) у відповідний до кінцевого контрольованого пристрою вид керування і монтується усередині або зовні кінцевого контрольованого пристрою. 2. Система за п. 1, яка відрізняється тим, що базова станція (Н) та/або приймачі-передавачі з контролерами (П) та/або адаптери інтерфейсу (А) мають щонайменше два джерела автономного живлення для поперемінного їх підключення та посилання сигналу про їх роботу до інтерфейсу користувача. 3. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що канали між пристроєм керування (У) та базовою станцією (Н) та/або між базовою станцією (Н) та адаптерами інтерфейсу (А) є захищеними від несанкціонованого доступу. 4. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що операційні системи базової станції (Н) та пристроїв керування (У) виконані з можливістю функціонування в реальному часі. 5. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що згруповані в кластери кінцеві контрольовані пристрої виконані з можливістю їх довільного пересування у межах кластера з використанням динамічної маршрутизації у мережі кластера та уніфікованого протоколу передачі команд, підтримуючого динамічну маршрутизацію. 7 UA 98529 C2 8 UA 98529 C2 9 UA 98529 C2 10 UA 98529 C2 11 UA 98529 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Назва патенту англійськоюRemote object control interactive system
Автори англійськоюLutov Artem Vitaliyovich, Kharahorhiev Serhii Markovych
Назва патенту російськоюИнтерактивная система дистанционного управления объектами
Автори російськоюЛутов Артем Виталийович, Харагоргиев Сергей Маркович
МПК / Мітки
МПК: H02J 13/00, G05B 19/042
Мітки: система, керування, інтерактивна, об'єктами, дистанційного
Код посилання
<a href="https://ua.patents.su/14-98529-interaktivna-sistema-distancijjnogo-keruvannya-obehktami.html" target="_blank" rel="follow" title="База патентів України">Інтерактивна система дистанційного керування об’єктами</a>
Система дистанційного керування з безпечної відстані для очисних машин і комплексів
Номер патенту: 70559
Опубліковано: 15.10.2004
Автори: Сірченко Володимир Миколайович, Пуріс Олександр Іванович, Курносов Григорій В'ячеславович, Курносов Вячеслав Григорович, Сидяк Володимир Олександрович, Красік Яків Львович, Сіроткін Олександр Арнольдович, Сіненко Віктор Васильович
МПК: E21C 35/24
Мітки: система, очисних, керування, комплексів, дистанційного, машин, відстані, безпечної
Формула / Реферат:
Системадистанційного керування з безпечної відстані для очисних машин і комплексів, що складається з датчиків місцезнаходження комбайна, блока комбайнового, пульта переносного, модулів енергоживлення, коробок клемних, постів керування секцією, блоків магістральних, поста керування конвеєром, блока контролю двигунів, блока штрекового, підключеного першим входом до загальношахтної інформаційної системи і з'єднаного другим входом з виходами...
Система дистанційного керування охороною й обороною об`єктів
Номер патенту: 30641
Опубліковано: 11.03.2008
Автори: Сендецький Микола Миколайович, Василенко Олександр Васильович, Андрійченко Олег Станіславович, Комаров Володимир Олександрович, Жованик Борис Євгенійович, Машталір Вадим Віталійович, Мельник Олександр Дмитрович, Наумов Олександр Миколайович, Іванов Борис Павлович, Турчин Валентин Миколайович, Кручінін Сергій Володимирович, Лапицький Сергій Володимирович, Лотоха Людмила Михайлівна
МПК: F41H 11/00
Мітки: дистанційного, об'єктів, охороною, обороною, система, керування
Формула / Реферат:
1. Система дистанційного керування охороною й обороною об'єктів, що містить одну, дві або більше одиниць стрілецької зброї з дистанційним керуванням і боєкомплектом, аналогічну за кількістю одиниць зброї кількість відеокамер, установлених співвісно зі зброєю, приводів вертикального та горизонтального переміщення зброї, приводів спускових механізмів зброї, керуючих приймально-передавальних пристроїв і блоків розподілу команд, а також пристрій...
Система дистанційного керування персональним комп`ютером з використанням бездротового телефонного апарата
Номер патенту: 14440
Опубліковано: 15.05.2006
Автор: Крамченко Віталій Олександрович
МПК: G06F 13/00, G06F 3/01
Мітки: керування, апарата, персональним, дистанційного, система, використанням, бездротового, телефонного, комп'ютером
Формула / Реферат:
Система дистанційного керування персональним комп'ютером, що включає персональний комп'ютер (ПК), оснащений звуковою картою і звуковими колонками, та бездротовий телефоннийапарат, який складається з бази та трубки, що зв'язані між собою за допомогою радіозв'язку, причому база з'єднана з мікрофонним входом звукової карти ПК таким чином, що один контакт виходу бази з'єднаний з контактом GND мікрофонного входу звукової карти, другий контакт...
Система мовлення й приймання, а також приймач-декодер і пристрій дистанційного керування для неї
Номер патенту: 66789
Опубліковано: 15.06.2004
Автори: Байасі Мулхам, Деклерк Крістоф, Баст'єн Жан-Поль
МПК: H04N 7/173, H04N 7/16
Мітки: система, пристрій, дистанційного, неї, приймання, приймач-декодер, мовлення, керування, також
Формула / Реферат:
1. Приймальний пристрій, що містить приймач-декодер для використання при прийманні телевізійної або радіопрограми або файла даних і який включає в себе засіб для взаємодії з кредитною або банківською карткою користувача для зчитування кредитної або банківської інформації, що знаходиться на картці, а також, окремо від згаданого засобу, додатковий засіб взаємодії з певною карткою користувача, для зчитування інформації, що знаходиться на цій...
Інтерактивна мікрохвильова система передачі даних
Номер патенту: 44932
Опубліковано: 15.03.2002
Автори: Баранов Олександр Андрійович, Савченко Олексій Якович, Наритник Теодор Миколайович, Ременець Михайло Іванович, Фролов Віктор Іванович, Ільченко Михайло Юхимович, Малєв Валерій Іванович, Гряник Михайло Васильович, Войтенко Олександр Григорович, Згуровський Михайло Захарович, Понеділко Віктор Іванович
МПК: H04B 7/165
Мітки: даних, передачі, інтерактивна, мікрохвильова, система
Формула / Реферат:
Інтерактивна мікрохвильова система передачі даних, яка складається з підсистеми прийому, формування й опрацювання інформації, залученої до мережі Інтернет, центральної, що передає, та абонентських приймальних станцій, яка відрізняється тим, що система містить мережу радіодоступу, що працює в режимі міжнародного стандарту IS-95 (CDMA) і складається з комутатора, сполученого з базовими станціями, абонентських радіотерміналів з вмонтованими...
Попередній патент: Пристрій автоматичного регулювання підсилювання
Наступний патент: Сигаретна пачка
Випадковий патент: Пристрій для очищення фільтратів полігонів твердих побутових відходів без витрат зовнішньої енергії