Система дистанційного керування з безпечної відстані для очисних машин і комплексів
Номер патенту: 70559
Опубліковано: 15.10.2004
Автори: Сіроткін Олександр Арнольдович, Курносов Вячеслав Григорович, Пуріс Олександр Іванович, Сіненко Віктор Васильович, Курносов Григорій В'ячеславович, Сірченко Володимир Миколайович, Красік Яків Львович, Сидяк Володимир Олександрович
Формула / Реферат
Системадистанційного керування з безпечної відстані для очисних машин і комплексів, що складається з датчиків місцезнаходження комбайна, блока комбайнового, пульта переносного, модулів енергоживлення, коробок клемних, постів керування секцією, блоків магістральних, поста керування конвеєром, блока контролю двигунів, блока штрекового, підключеного першим входом до загальношахтної інформаційної системи і з'єднаного другим входом з виходами датчиків місцезнаходження комбайна, третім входом - з виходом блока контролю двигунів, четвертим - з виходом поста керування конвеєром, п'ятим - з входом блока комбайнового, вихід якого підключений до входів постів керування секцією, шостим - з входами модулів енергоживлення, сьомим - з виходом першого блока магістрального, вхід якого підключений до виходів інших блоків магістральних, яка відрізняється тим, що до неї уведені передавачі сейсмоакустичної інформації, підключені виходом до восьмого входу блока штрекового, датчик швидкості і напрямку повітря, з'єднаний виходом з його дев'ятим входом, n датчиків метану, виходи яких з'єднані з десятим його входом, вихід його підключений до входів усіх датчиків метану через модуль енергоживлення.
Текст
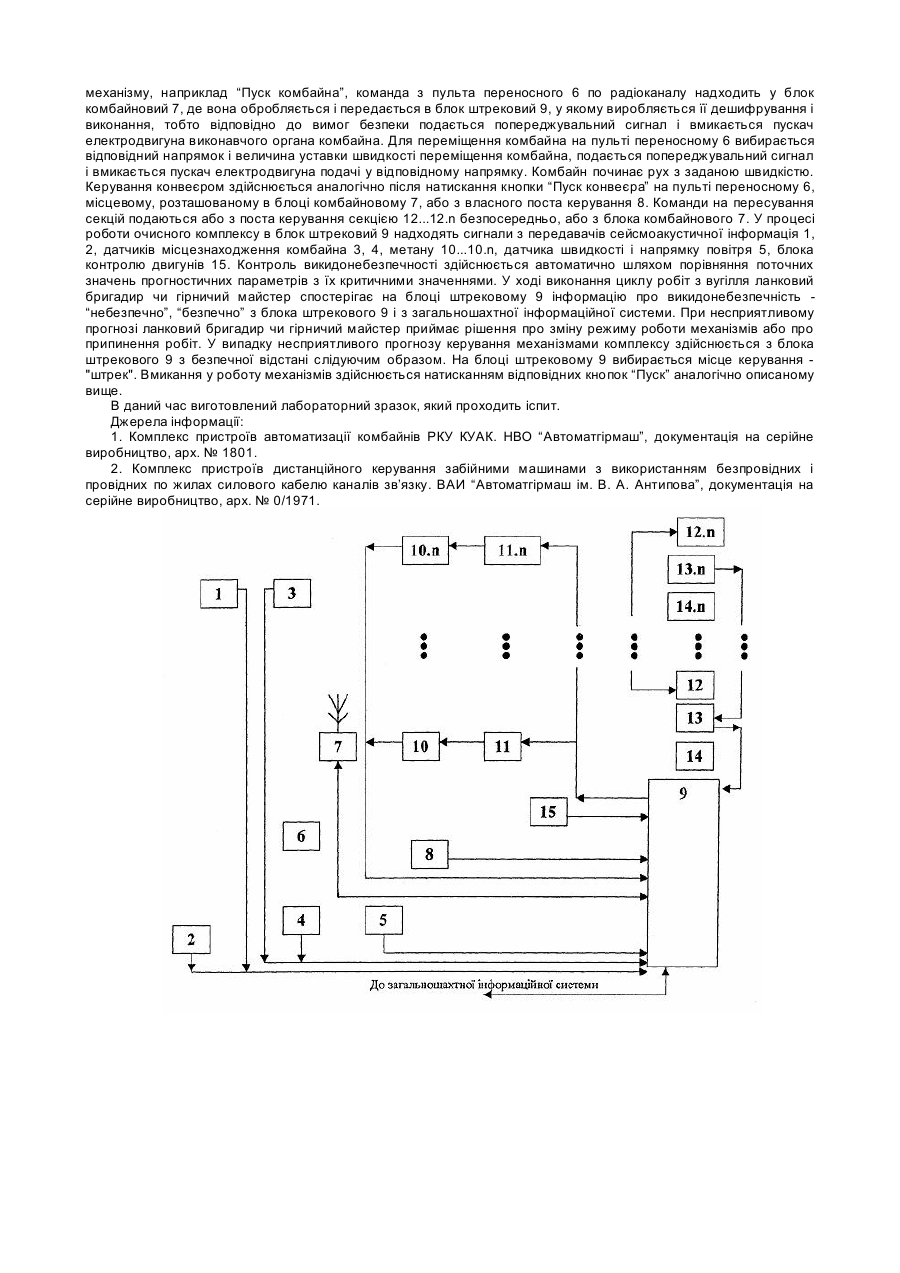
Винахід відноситься до гірничої промисловості і може використовуватися в шахтах для дистанційного керування з безпечної відстані очисними машинами і комплексами. Відомий комплекс пристроїв автоматизації комбайнів [1], що складається з двох пультів керування, коробки розподільної, панелі апаратів, блока індикації, панелі захисту, датчика швидкості, термодатчика, датчика тиску і датчика рівня. Недоліком згаданого комплексу пристроїв автоматизації комбайнів є відсутність можливості керування зі штреку, акустичного і сейсмоакустичного контролю, контролю метану, на штреці оперативної інформації про стан комбайна. Відомий комплекс пристроїв дистанційного керування забійними машинами з використанням безпровідних і провідних по жилах силового кабелю каналів зв'язку [2], що складається з блока узгодження і живлення, пристрою приєднання, блока прийомопередавача і попереджувальної сигналізації, блока сполучення команд з переносного пульта керування, пульта керування, блока акустики, пульта керування переносного, приймача, прийомопередавача акустичної інформації, датчика місцезнаходження комбайна, розміщених на комбайні, і блока штрекового (апарат керування і модуль енергоживлення), пристрою приєднання, блока контролю двигунів комбайна, комплексу пристроїв керування забійними машинами, коробки клемної, які знаходяться на штреці. Недоліком згаданого комплексу є обмежене число контрольованих параметрів викидонебезпечності. Задачею винаходу є підвищення безпеки робіт за рахунок збільшення числа контрольованих параметрів викидонебезпечності, обробки їх і наступного аналізу. Поставлена задача вирішується тим, що в систему дистанційного керування з безпечної відстані для очисних машин і комплексів, що складається з датчиків місцезнаходження комбайна, блока комбайнового, пульта переносного, модулів енергоживлення, коробок клемних, постів керування секцією, блоків магістральних, поста керування конвеєром, блока контролю двигунів, блока штрекового, підключеного першим входом до загальношахтної інформаційної системи і з'єднаного другим входом з виходами датчиків місцезнаходження комбайна, третім входом - з виходом блока контролю двигунів, четвертим - з виходом поста керування конвеєром, п'ятим - з входом блока комбайнового, вихід якого підключений до входів постів керування секцією, шостим - з входами модулів енергоживлення, сьомим - з виходом першого блока магістрального, вхід якого підключений до виходів інших блоків магістральних, уведені передавачі сейсмоакустичної інформації, підключені виходом до восьмого входу блока штрекового, датчик швидкості і напрямку повітря, з'єднаний виходом з його дев'ятим входом, n датчиків метану, виходи яких з'єднані з десятим його входом, а вихід його підключений до входів усіх датчиків метану через модуль енергоживлення. Введення в систему передавачів сейсмоакустичної інформації, підключених виходом до восьмого входу блока штрекового, датчика швидкості і напрямку повітря, з'єднаного виходом з його дев'ятим входом, n датчиків метану, виходи яких приєднані до десятого його входу, а вихід його підключений до входів усіх датчиків метану через модуль енергоживлення дозволило підвищити безпеку робіт за рахунок збільшення числа контрольованих параметрів викидонебезпеки, обробки їх і наступного аналізу. На кресленні приведена схема системи дистанційного керування з безпечної відстані для очисних машин і комплексів. Система дистанційного керування з безпечної відстані для очисних машин і комплексів складається з передавачів сейсмоакустичної інформації 1, 2, датчиків місцезнаходження комбайнів 3, 4, датчика швидкості і напрямку повітря 5, пульта переносного 6, блока комбайнового 7, поста керування конвеєром 8, блока штрекового 9, датчиків метану 10...10.n, модулів енергоживлення 11...11.n, постів керування секцією 12...12.n, блоків магістральних 13...13.n, коробок клемних 14...14.n, блока контролю двигунів 15. Блок штрековий 9 підключений першим входом до загальношахтної інформаційної системи і з'єднаний другим входом з виходами датчиків місцезнаходження комбайна 3, 4, третім входом - з виходом блока контролю двигунів 15, четвертим - з виходом поста керування конвеєром 8, п'ятим - з входом блока комбайнового 7, вихід якого підключений до входів постів керування секцією 12...12.n, шостим - з входами модулів енергоживлення 11...11.n, сьомим - з виходом першого блока магістрального 13, вхід якого підключений до виходів інших блоків магістральних 13.n-13, передавачі сейсмоакустичної інформації 1, 2, підключені виходом до восьмого входу блока штрекового 9, датчик швидкості і напрямку повітря 5, з'єднаний виходом з його дев'ятим входом, n датчиків метану 10...10.n, виходом з'єднані з десятим його входом, вихід його підключений до входів усіх датчиків метану 10...10.n через модуль енергоживлення 11...11.n. У системі дистанційного керування з безпечної відстані для очисних машин і комплексів використані наступні покупні вироби: - передавач сейсмоакустичної інформації 1, 2 використаний з серійно виготуваній Конотопським електромеханічним заводом "Червоний металіст" апаратури акустичного контролю ступеня викидонебезпечності вугільних пластів АК, розробленою Національною гірничою академією України; - датчик швидкості і напрямку руху повітря 5 - використаний серійно виготуваний Конотопським електромеханічним заводом “Червоний металіст” датчик швидкості і напрямки руху повітря ДСНВ, розроблений Дніпропетровським гірничим інститутом; - датчик метану 10...10.n - серійно виготуваний Конотопським електромеханічним заводом "Червоний металіст" термокондуктометричний датчик ДМВК, розроблений ІГД ім. Скочинського; - датчики місцезнаходження комбайна 3, 4, пульт переносний 6, блок комбайновий 7, пост керування конвеєром 8, блок штрековий 9, модулі енергоживлення 11...11.n, пости керування секцією 12...12.n, блоки магістральні 13...13.n, коробки клемні 14...14.n, блок контролю двигунів 15 застосовані з комплексу пристроїв дистанційного керування забійними машинами з використанням безпровідних і провідних по жилах силового кабелю каналів зв'язку, розробленого ВАТ "Автоматгімаш ім. В.А. Антипова" і серійно виготовленого ВАТ “Елміз”. Працює система слідуючим чином. Керування очисними машинами і комплексами може здійснюватися з пульта переносного 6 чи з блока комбайнового 7, чи с блока штрекового 9. Вибір місця керування задається блоком штрековим 9. Припустимо, що керування виробляється з пульта переносного 6. При цьому на ньому натискається кнопка “Пуск” відповідного механізму, наприклад “Пуск комбайна”, команда з пульта переносного 6 по радіоканалу надходить у блок комбайновий 7, де вона обробляється і передається в блок штрековий 9, у якому виробляється її дешифрування і виконання, тобто відповідно до вимог безпеки подається попереджувальний сигнал і вмикається пускач електродвигуна виконавчого органа комбайна. Для переміщення комбайна на пульті переносному 6 вибирається відповідний напрямок і величина уставки швидкості переміщення комбайна, подається попереджувальний сигнал і вмикається пускач електродвигуна подачі у відповідному напрямку. Комбайн починає рух з заданою швидкістю. Керування конвеєром здійснюється аналогічно після натискання кнопки “Пуск конвеєра” на пульті переносному 6, місцевому, розташованому в блоці комбайновому 7, або з власного поста керування 8. Команди на пересування секцій подаються або з поста керування секцією 12...12.n безпосередньо, або з блока комбайнового 7. У процесі роботи очисного комплексу в блок штрековий 9 надходять сигнали з передавачів сейсмоакустичної інформація 1, 2, датчиків місцезнаходження комбайна 3, 4, метану 10...10.n, датчика швидкості і напрямку повітря 5, блока контролю двигунів 15. Контроль викидонебезпечності здійснюється автоматично шляхом порівняння поточних значень прогностичних параметрів з їх критичними значеннями. У ході виконання циклу робіт з вугілля ланковий бригадир чи гірничий майстер спостерігає на блоці штрековому 9 інформацію про викидонебезпечність “небезпечно”, “безпечно” з блока штрекового 9 і з загальношахтної інформаційної системи. При несприятливому прогнозі ланковий бригадир чи гірничий майстер приймає рішення про зміну режиму роботи механізмів або про припинення робіт. У випадку несприятливого прогнозу керування механізмами комплексу здійснюється з блока штрекового 9 з безпечної відстані слідуючим образом. На блоці штрековому 9 вибирається місце керування "штрек". Вмикання у роботу механізмів здійснюється натисканням відповідних кнопок “Пуск” аналогічно описаному вище. В даний час виготовлений лабораторний зразок, який проходить іспит. Джерела інформації: 1. Комплекс пристроїв автоматизації комбайнів РКУ КУАК. НВО “Автоматгірмаш”, документація на серійне виробництво, арх. № 1801. 2. Комплекс пристроїв дистанційного керування забійними машинами з використанням безпровідних і провідних по жилах силового кабелю каналів зв’язку. ВАИ “Автоматгірмаш ім. В. А. Антипова”, документація на серійне виробництво, арх. № 0/1971.
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for remote control from safe distance for productive machines and complexes
Автори англійськоюSydiak Volodymyr Oleksandrovych, Puris Oleksandr Ivanovych, Sirotkin Oleksandr Arnoldovych, Sinenko Viktor Vasyliovych, Sirchenko Volodymyr Mykolaiovych, Kurnosov Viacheslav Hryhorovych, Krasik Yakiv Lvovych, Kurnosov Hryhorii Viacheslavovych
Назва патенту російськоюСистема дистанционного управления с безопасного расстояния для очистных машин и комплексов
Автори російськоюСидяк Владимир Александрович, Пурис Александр Иванович, Сироткин Александр Арнольдович, Синенко Виктор Васильевич, Сирченко Владимир Николаевич, Курносов Вячеслав Григорьевич, Красик Яков Львович, Курносов Григорий Вячеславович
МПК / Мітки
МПК: E21C 35/24
Мітки: комплексів, система, дистанційного, керування, очисних, відстані, машин, безпечної
Код посилання
<a href="https://ua.patents.su/2-70559-sistema-distancijjnogo-keruvannya-z-bezpechno-vidstani-dlya-ochisnikh-mashin-i-kompleksiv.html" target="_blank" rel="follow" title="База патентів України">Система дистанційного керування з безпечної відстані для очисних машин і комплексів</a>
Система автоматизації керування і діагностики очисних комбайнів і контролю небезпеки вибою
Номер патенту: 69616
Опубліковано: 15.09.2004
Автори: Курносов Григорій В'ячеславович, Андрусенко Сергій Миколайович, Красик Яков Львович, Сіненко Віктор Васильович, Сірченко Володимир Миколайович, Курносов Вячеслав Григорович
МПК: E21C 35/24
Мітки: система, очисних, керування, небезпеки, контролю, вибою, діагностики, автоматизації, комбайнів
Формула / Реферат:
Система автоматизації керування і діагностики очисних комбайнів і контролю небезпеки вибою, що містить трансформатор живлення, з'єднаний входом із двигуном різання і пускачем, першим виходом - із входом перетворювача частоти, перший вихід останнього підключений до двигунів подачі, а вхід/вихід - до пульта керування, другим виходом, через блок керування, - відповідно з першим входом лівого і правого пультів керування, коробки клемної,...
Система контролю і керування на відстані об’єктами
Номер патенту: 47240
Опубліковано: 17.06.2002
Автор: Ліповцев Дмитро Дмитрович
МПК: G08C 19/00
Мітки: керування, відстані, об'єктами, контролю, система
Формула / Реферат:
Система контролю і керування на відстані об'єктами, яка включає пульт керування, органи керування пристроями об'єкта, первинні перетворювачі, встановлені на пристроях об'єкта для отримання сигналів телевимірювання і телесигналізації, що вказують на стан контрольованого об'єкта, і контрольний пункт, зв'язаний з первинними перетворювачами та органами керування пристроями об'єкта і за допомогою каналу зв'язку з пультом керування, причому...
Пристрій дистанційного керування
Номер патенту: 1811
Опубліковано: 15.05.2003
Автори: Стаднік Микола Іванович, Мезніков Артур Володимирович
МПК: G08C 19/16
Мітки: дистанційного, керування, пристрій
Формула / Реферат:
Пристрій дистанційного керування, що містить блок дистанційного керування, переносний пульт керування і джерела живлення, який відрізняється тим, що він оснащений другим переносним пультом керування, з'єднаним однією кабельною перемичкою з блоком дистанційного керування.
Пристрій для дистанційного керування
Номер патенту: 30470
Опубліковано: 15.05.2002
Автори: Карлюка Анатолій Сергійович, Янов Леонід Іванович, Мірошников Олександр Вікторович, Столяренко Олександр Іванович
МПК: H02J 13/00
Мітки: керування, дистанційного, пристрій
Формула / Реферат:
1. Пристрій для дистанційного керування, що містить пульт керування, оснащений принаймні двома кнопками, генератор імпульсів та прийомний блок, що включає блок живлення, детектор наявності сигналів, блок блокування та блоки контролю, який відрізняється тим, що у прийомний блок додатково введені блок керованих ключів, прийомний регістр, розподільник і принаймні два блоки перевірки блоків контролю, а у ланцюзі кожної кнопки встановлений діод,...
Пристрій для дистанційного керування енергетичними об’єктами по лініях електропередачі
Номер патенту: 61015
Опубліковано: 15.10.2003
Автори: Хлистов Валерій Михайлович, Яндульський Олександр Станіславович, Григорів Василь Романович, Велігоцький Георгій Павлович
МПК: H02J 13/00
Мітки: електропередачі, об'єктами, дистанційного, пристрій, керування, енергетичними, лініях
Формула / Реферат:
Пристрій для дистанційного керування енергетичними об'єктами по лініях електропередачі, що містить пункт керування, який включає приймач зовнішніх сигналів і таймер, виходи яких підключені до першого і другого входів елемента АБО відповідно, передавальний вузол, перший вихід якого підключений до входу блока узгодження пункту керування, чотири виходи якого підключені до відповідних проводів трифазної електричної мережі, а п'ятий вихід...
Попередній патент: Дентальний імплантат
Наступний патент: Спосіб визначення динамічних характеристик пружних механічних систем за даними перехідних процесів
Випадковий патент: Спосіб моделювання гострого експериментального адреналінгідрокортизонового інфаркту міокарда