Спосіб підвищення точності виявлення сигналів у радіолокаційних системах зі складними зондувальними сигналами
Номер патенту: 108898
Опубліковано: 25.06.2015
Автори: Конахович Георгій Филимонович, Голубничий Олексій Георгійович
Формула / Реферат
Спосіб підвищення точності виявлення сигналів у радіолокаційних системах зі складними зондувальними сигналами, який полягає в тому, що в процесі оброблення відбитого зондувального сигналу одночасно зменшують рівень бічних пелюсток та ширину основної пелюстки автокореляційної функції, що дозволяє підвищити відповідно якість розпізнавання при дії завад та роздільну здатність по дальності, який відрізняється тим, що у передавальному пристрої радіолокаційної станції зондувальний сигнал формують з двох або більше різних складових однакової тривалості, які є фазоманіпульованими сигналами та які формують відповідно до бінарних послідовностей , елементи яких визначають за правилами
 ,
,
якщо бінарна послідовність є послідовністю підтипу А або послідовністю підтипу В типу 1 довжиною ![]() , де
, де ![]() - натуральне число,
- натуральне число,

якщо бінарна послідовність є послідовністю типу 2 довжиною ![]() , де
, де ![]() - натуральне число,
- натуральне число,
 ,
,
якщо бінарна послідовність є послідовністю підтипу А або послідовністю підтипу В типу 3 довжиною ![]() , де
, де ![]() - натуральне число, у приймальному пристрої радіолокаційної станції здійснюють оброблення кожної складової відбитого зондувального сигналу з використанням узгодженої фільтрації, здійснюють затримки в часі результатів узгодженої фільтрації складових відбитого зондувального сигналу таким чином, щоб сумістити в одному й тому самому моменті часу центри всіх основних пелюсток автокореляційних функцій складових зондувального сигналу, здійснюють перемноження результатів узгодженої фільтрації складових відбитого зондувального сигналу з суміщеними в одному й тому самому моменті часу центрами всіх основних пелюсток автокореляційних функцій складових зондувального сигналу, результат перемноження використовують для подальшого отримання радіолокаційної інформації.
- натуральне число, у приймальному пристрої радіолокаційної станції здійснюють оброблення кожної складової відбитого зондувального сигналу з використанням узгодженої фільтрації, здійснюють затримки в часі результатів узгодженої фільтрації складових відбитого зондувального сигналу таким чином, щоб сумістити в одному й тому самому моменті часу центри всіх основних пелюсток автокореляційних функцій складових зондувального сигналу, здійснюють перемноження результатів узгодженої фільтрації складових відбитого зондувального сигналу з суміщеними в одному й тому самому моменті часу центрами всіх основних пелюсток автокореляційних функцій складових зондувального сигналу, результат перемноження використовують для подальшого отримання радіолокаційної інформації.
Текст
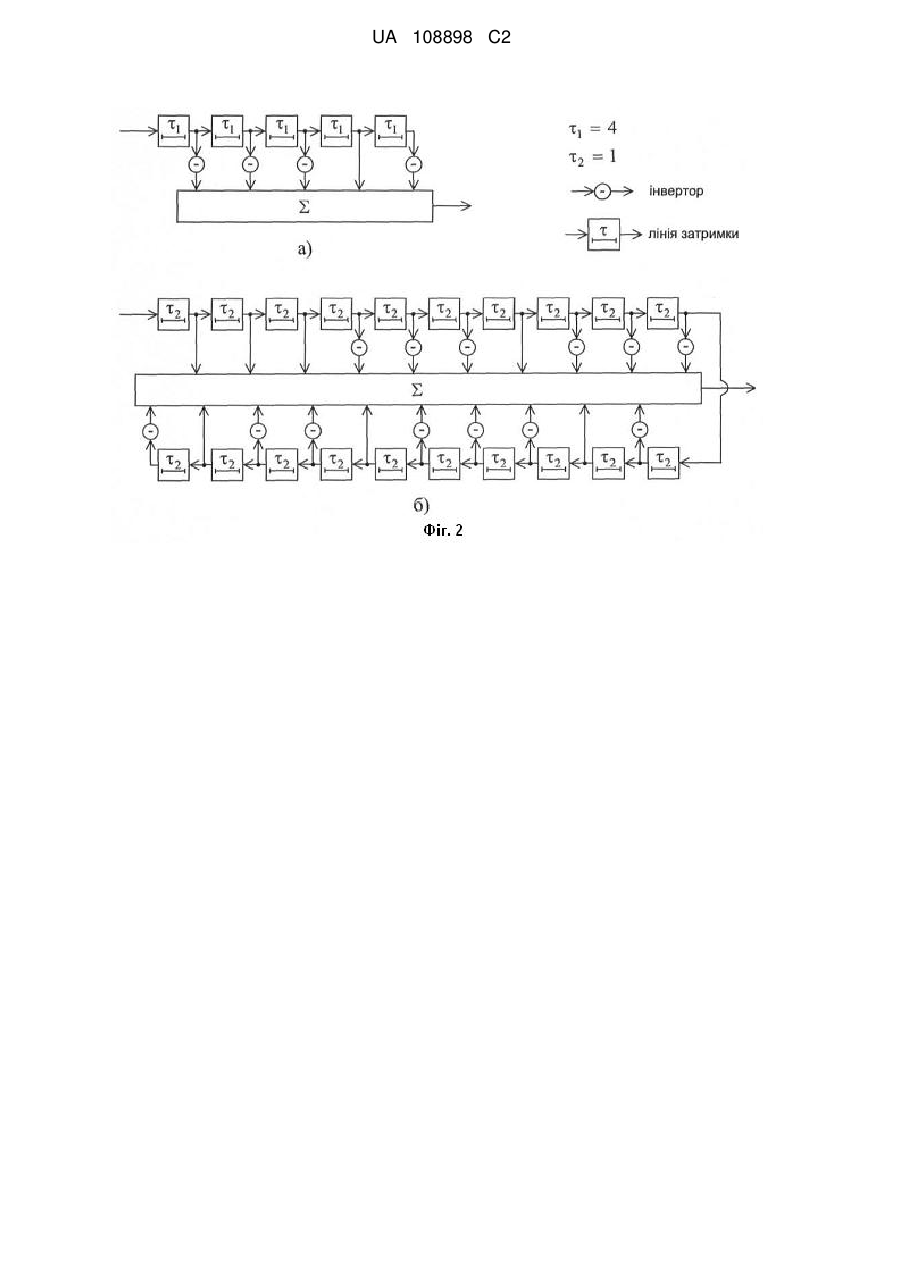
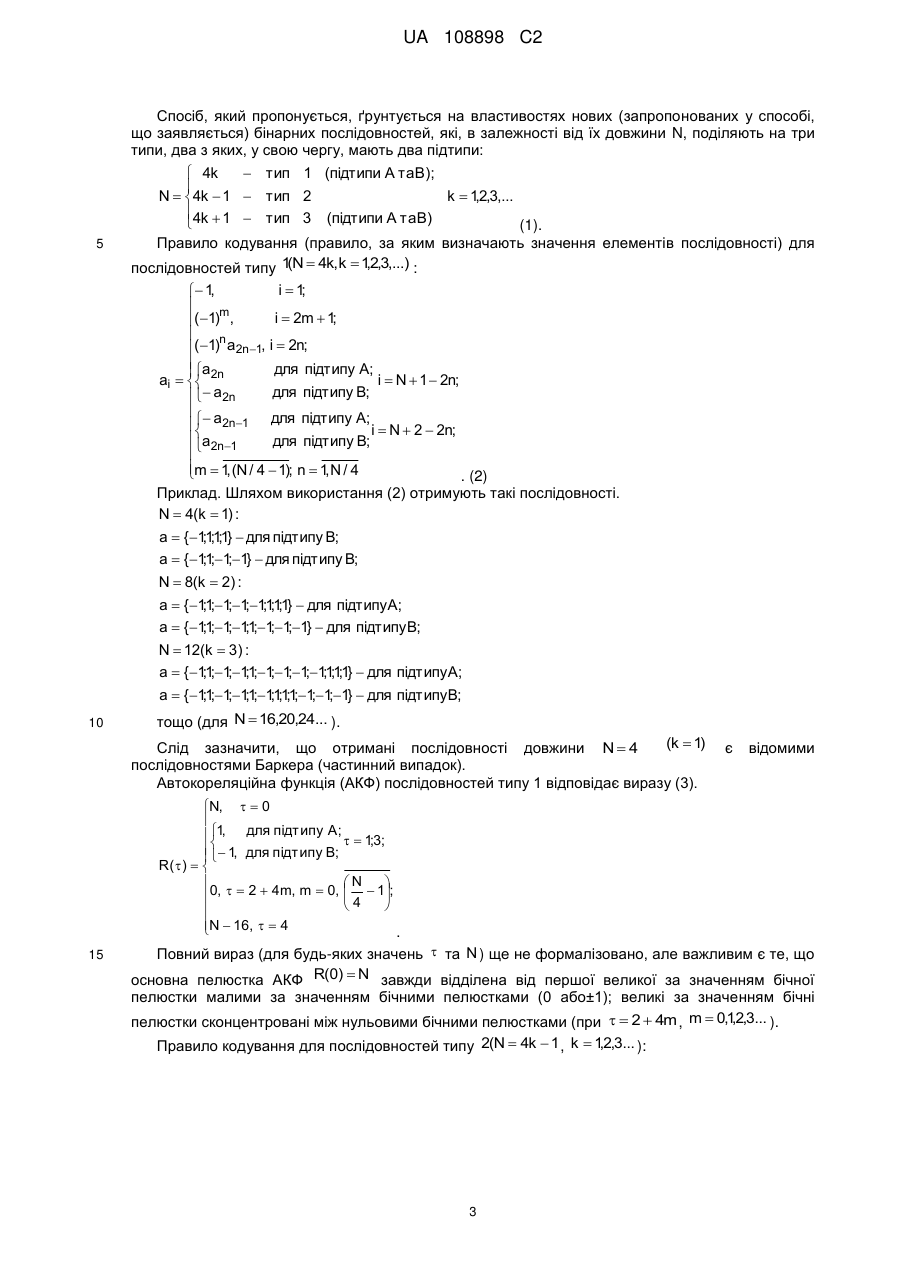
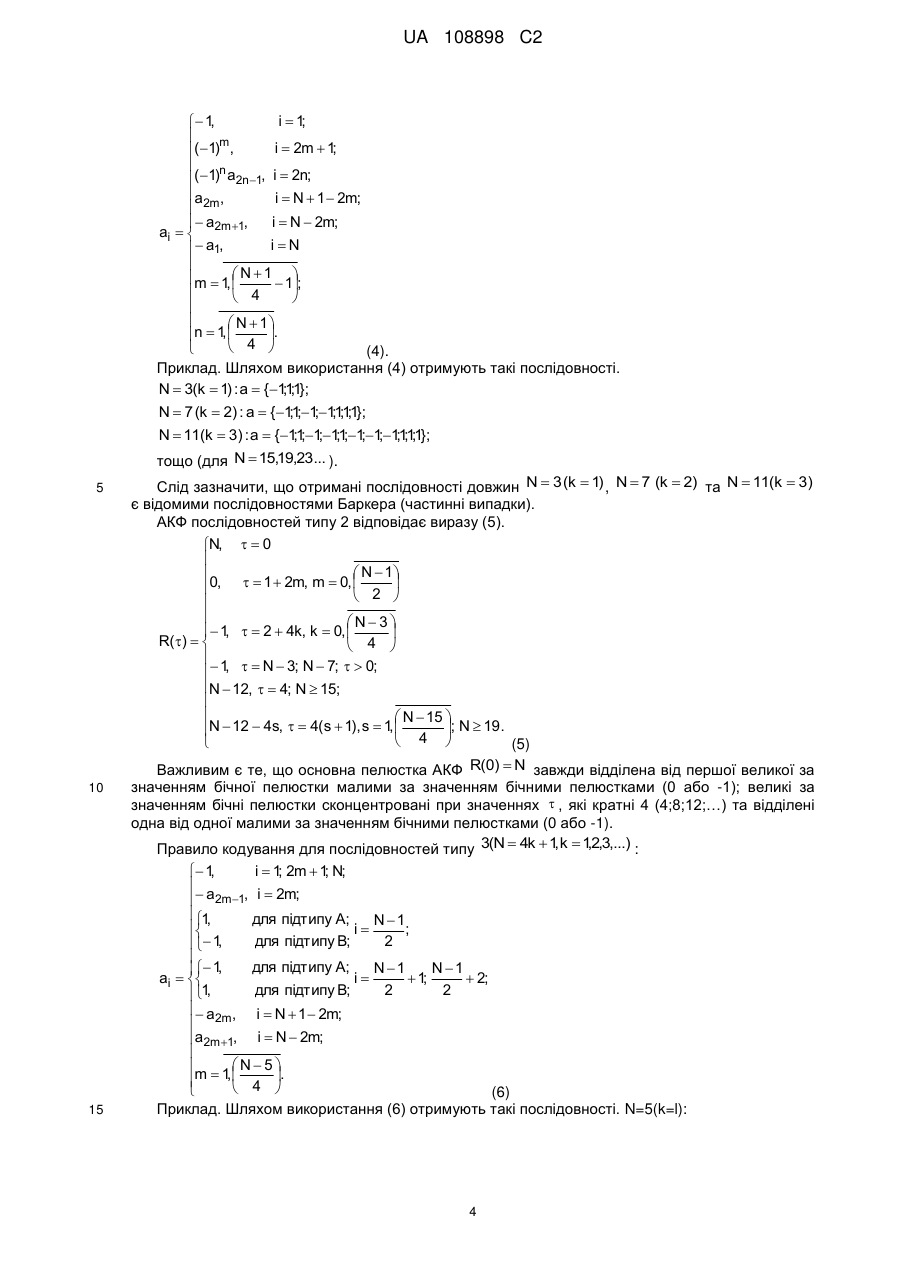
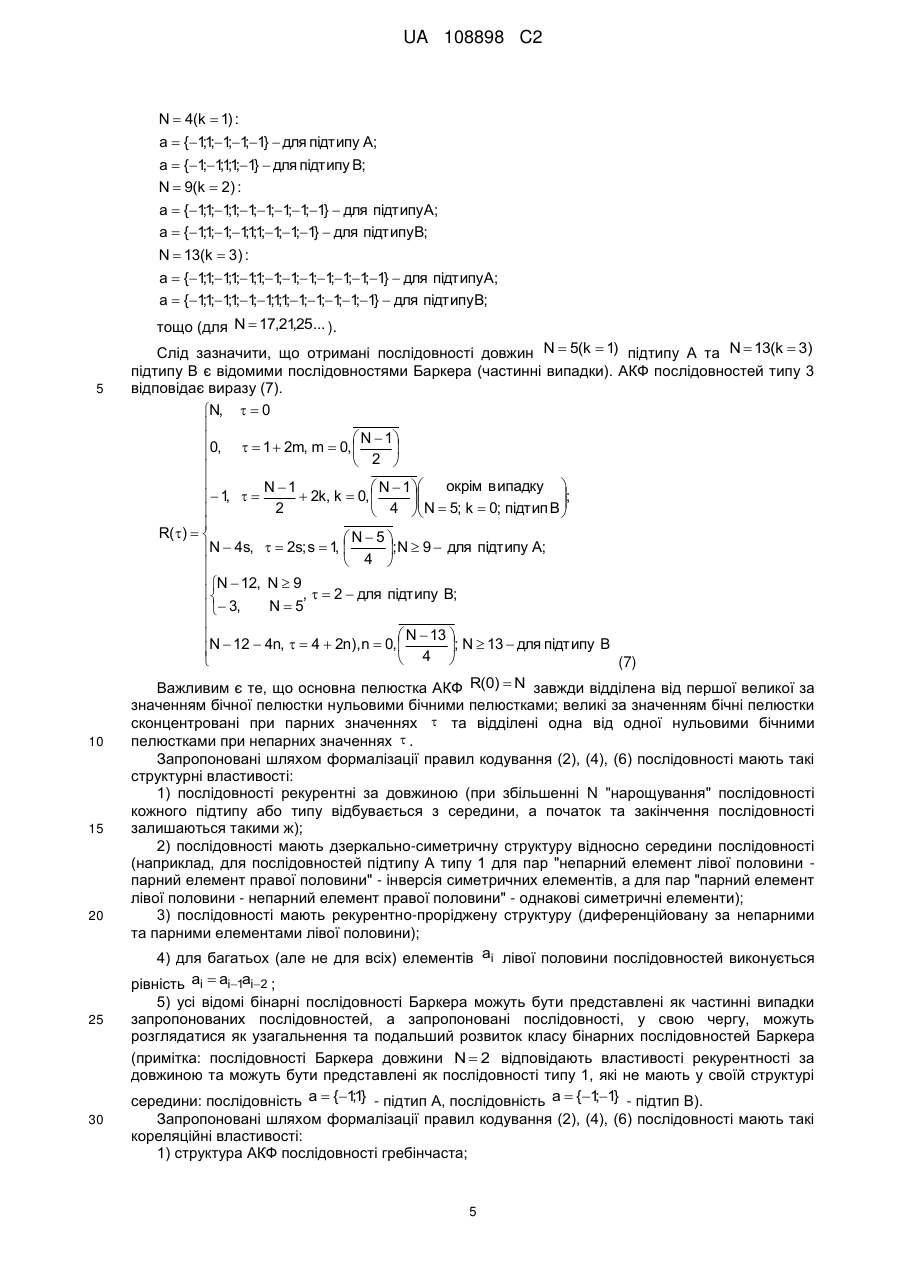
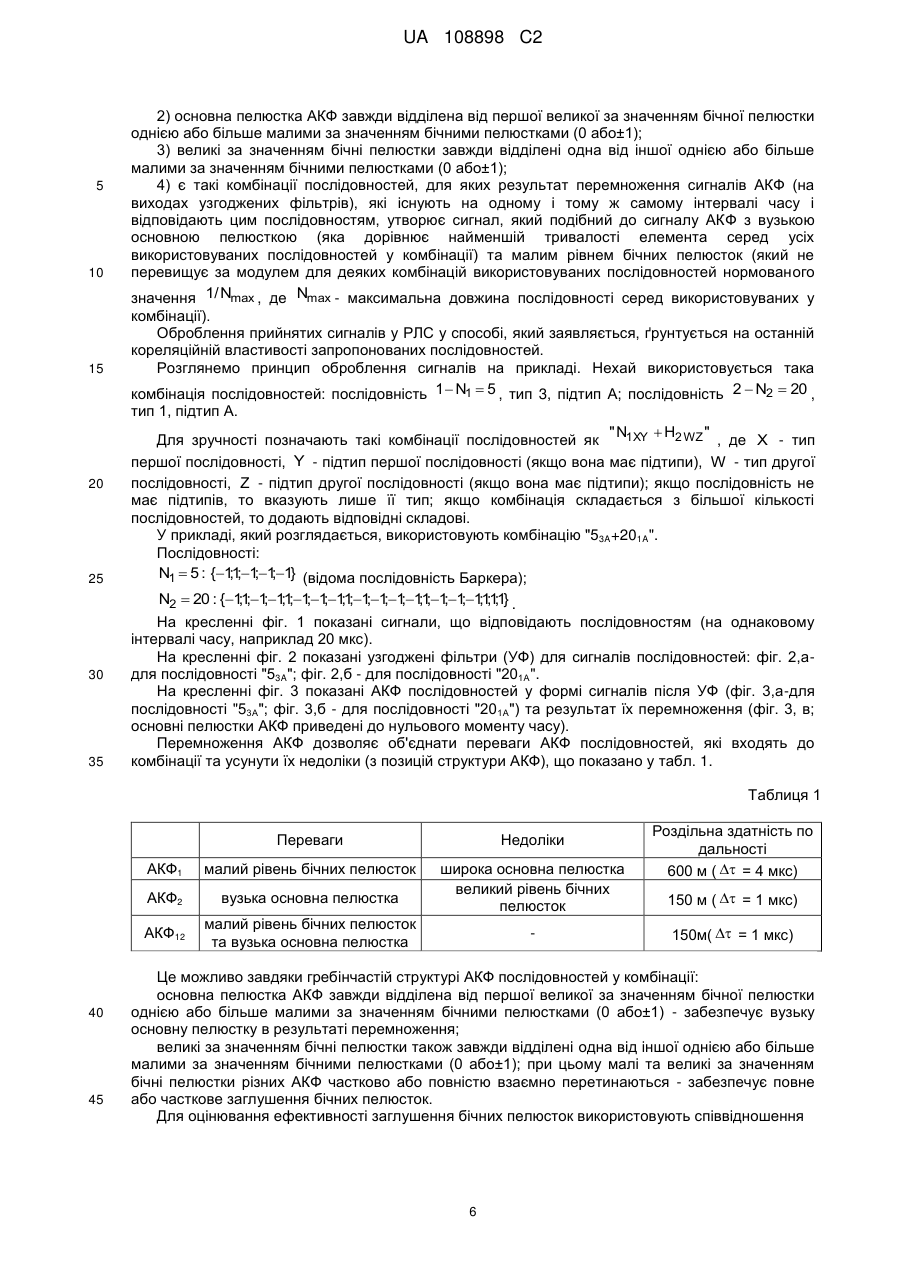
Реферат: Спосіб належить до радіо- та радіолокаційної техніки і може бути використаний для підвищення точності виявлення сигналів у радіолокаційних системах зі складними зондувальними сигналами, яке досягається завдяки одночасному зменшенню рівня бічних пелюсток (підвищення якості розпізнавання при дії завад) та ширини основної пелюстки автокореляційної функції (підвищення роздільної здатності по дальності) в процесі оброблення відбитого зондувального сигналу. У передавальному пристрої радіолокаційної станції зондувальний сигнал формують з двох або більше різних складових однакової тривалості, які є фазоманіпульованими сигналами та які формують відповідно до запропонованих бінарних послідовностей. У приймальному пристрої радіолокаційної станції здійснюють оброблення кожної складової відбитого зондувального сигналу з використанням узгодженої фільтрації. Потім здійснюють затримки в часі результатів узгодженої фільтрації складових відбитого зондувального сигналу таким чином, щоб сумістити в одному й тому самому моменті часу центри всіх основних пелюсток автокореляційних функцій складових зондувального сигналу. Після цього здійснюють перемноження результатів узгодженої фільтрації складових відбитого зондувального сигналу з суміщеними в одному й тому самому моменті часу центрами всіх основних пелюсток автокореляційних функцій складових зондувального сигналу. Результат перемноження використовують для подальшого отримання радіолокаційної інформації. UA 108898 C2 (12) UA 108898 C2 UA 108898 C2 5 10 15 20 25 30 35 40 45 50 55 Група винаходів належить до радіо- та радіолокаційної техніки і може бути використана для підвищення точності виявлення сигналів у радіолокаційних системах (РЛС) зі складними зондувальними сигналами, яке досягається завдяки одночасному зменшенню рівня бічних пелюсток (підвищення якості розпізнавання при дії завад) та ширини основної пелюстки автокореляційної функції (підвищення роздільної здатності по дальності) в процесі оброблення відбитого зондувального сигналу. Рівень техніки, який можна вважати корисним для розуміння винаходу асоціюється з первинними активними РЛС з пасивною відповіддю, які використовують складні зондувальні сигнали з фазокодовою маніпуляцією. Прикладом, який відповідає цьому рівню техніки, є первинний канал аеродромної оглядової РЛС ASR-22/AL. Відомий спосіб придушення бічних пелюсток автокореляційної функції широкосмугового сигналу, метою якого є підвищення роздільної здатності радарних систем, покращення розпізнавання широкосмугових сигналів на фоні завад [Патент РФ №2335782 за МПК G01S7/36]. Зміст цього способу полягає в тому, що в кожному періоді зондування випромінюють один з двох, узгоджених один з одним, фазокодоманіпульованих сигналів, на приймальній стороні виконується стиснення - оптимальна фільтрація - прийнятих сигналів окремо для кожного періоду випромінювання, а результати оптимальної фільтрації двох послідовних періодів зондування додаються; при цьому, якщо фазоманіпульовані сигнали були узгоджені, то рівень бічних пелюсток результату додавання дорівнюватиме нулю. Недоліком цього способу є обмежена гнучкість зміни бази зондувального сигналу, яка залежить від довжини узгоджених кодових послідовностей N 2n , n 1 (N ...16;32...) , які використовуються у способі. Спосіб, який заявляється, дозволяє формувати зондувальні сигнали з більшою гнучкістю зміни бази зондувального сигналу, яка відповідає довжинам кодових послідовностей N 2n , n 1 (N ...16;20;24;28;32...) , а структура зондувального сигналу може містити більше двох складових (більше двох еквівалентних періодів зондування), причому кожна з них при обробленні зменшує рівень бічних пелюсток та, окрім того, ширину основної пелюстки. Відомий метод заглушення бічних пелюсток сигналу у вигляді бінарної фазоманіпульованої послідовності [Метод подавления боковых лепестков сигнала в виде бинарной фазоманипулированной последовательности [Електронний ресурс] / СВ. Зарецкий, В.А. Сельменев // Электронный научный журнал "Исследовано в России".-2008. - С. 846-852.- Режим доступу до статті: http://zhumal.ape.relarn.rvi/articles/2008/078.pdf]. Зміст методу полягає в тому, що кожна бічна пелюстка, яка заглушується, компенсуються затриманою та зменшеною за амплітудою центральною пелюсткою з урахуванням впливу бічних пелюсток сигналів, які додаються у системі оброблення результату узгодженої фільтрації. Недоліками цього методу, як зазначають його автори, є збільшення рівня шуму на виході системи оброблення сигналів, причому чим більше пелюсток, які заглушуються, тим більший рівень шуму, а також те, що збільшується рівень бічних пелюсток за межами області, в якій здійснюється їх заглушення. У способі, який заявляється, рівень шуму на виході системи оброблення також збільшується, при цьому також збільшується рівень корисного сигналу, причому співвідношення сигнал/шум на виході системи оброблення збільшується; збільшення рівня бічних пелюсток за межами області, в якій здійснюється їх заглушення не відбувається. Відомий спосіб зменшення рівня бічних пелюсток в радіолокаторі зі стисненням фазокодоманіпульованого сигналу [Патент РФ №2086998 за МПК G01S7/36]. Зміст цього способу полягає в тому, що на різних несучих частотах випромінюються два фазокодоманіпульованих сигнали, сформовані на основі додаткових послідовностей, а після оброблення відбитих від цілі сигналів бічні пелюстки двох стиснених відеосигналів (результатів оброблення) при додаванні взаємно компенсуються, а основні пелюстки додаються. У способі, який заявляється, окрім зменшення рівня бічних пелюсток, одночасно забезпечується зменшення ширини основної пелюстки, що дозволяє також підвищити роздільну здатність по дальності, а структура зондувального сигналу може містити більше двох складових, причому кожна з них при обробленні зменшує рівень бічних пелюсток та ширину основної пелюстки. Задача винаходу - підвищення точності виявлення сигналів у радіолокаційних системах зі складними зондувальними сигналами. Задача вирішується тим, що спосіб підвищення точності виявлення сигналів у радіолокаційних системах зі складними зондувальними сигналами, який полягає в тому, що в процесі оброблення відбитого зондувального сигналу одночасно зменшують рівень бічних пелюсток та ширину основної пелюстки автокореляційної функції, що дозволяє підвищити відповідно якість розпізнавання при дії завад та роздільну здатність по дальності, згідно з винаходом, у передавальному пристрої радіолокаційної станції зондувальний сигнал формують 1 UA 108898 C2 5 з двох або більше різних складових однакової тривалості, які є фазоманіпульованими сигналами та які формують відповідно до бінарних послідовностей ai , елементи яких визначають за правилами i 1; 1, m i 2m 1; ( 1) , n ( 1) a2n 1, i 2n; a для підтипу А; ai 2n i N 1 2n; для підтипу В; a2n a 2n 1 для підтипу А; i N 2 2n; a2n 1 для підтипу B; m 1, (N / 4 1); n 1, N / 4 , якщо бінарна послідовність є послідовністю підтипу А або послідовністю підтипу В типу 1 довжиною N 4k , де k - натуральне число, i 1; 1, m i 2m 1; ( 1) , n ( 1) a2n 1, i 2n; a , i N 1 2m; 2m , i N 2m; a ai 2m 1 iN a1, m 1, N 1 1; 4 N 1 . n 1, 4 , якщо бінарна послідовність є послідовністю типу 2 довжиною N 4k 1, де k - натуральне число, 10 15 20 1 , i 1 2m 1; N ; a2m1, i 2m; 1 , для підтипу А; N 1 i ; для підтипу В; 2 1 , для підтипу А; N 1 N 1 1 ai i 1 ; 2; 1 для підтипу В; 2 2 a , i N 1 2m; 2m i N 2m; a2m1, N5 , m 1 4 . , якщо бінарна послідовність є послідовністю підтипу А або послідовністю підтипу В типу 3 довжиною N 4k 1, де k - натуральне число, у приймальному пристрої радіолокаційної станції здійснюють оброблення кожної складової відбитого зондувального сигналу з використанням узгодженої фільтрації, здійснюють затримки в часі результатів узгодженої фільтрації складових відбитого зондувального сигналу таким чином, щоб сумістити в одному й тому самому моменті часу центри всіх основних пелюсток автокореляційних функцій складових зондувального сигналу, здійснюють перемноження результатів узгодженої фільтрації складових відбитого зондувального сигналу з суміщеними в одному й тому самому моменті часу центрами всіх основних пелюсток автокореляційних функцій складових зондувального сигналу, результат перемноження використовують для подальшого отримання радіолокаційної інформації. 2 UA 108898 C2 5 Спосіб, який пропонується, ґрунтується на властивостях нових (запропонованих у способі, що заявляється) бінарних послідовностей, які, в залежності від їх довжини N, поділяють на три типи, два з яких, у свою чергу, мають два підтипи: тип 1 (підтипи А таВ); 4k N 4k 1 тип 2 k 1 2,3,... , 4k 1 тип 3 (підтипи А таВ) (1). Правило кодування (правило, за яким визначають значення елементів послідовності) для ( , послідовностей типу 1 N 4k, k 12,3,...) : i 1; 1, m i 2m 1; ( 1) , n ( 1) a2n 1, i 2n; a для підтипу А; ai 2n i N 1 2n; для підтипу В; a2n a 2n 1 для підтипу А; i N 2 2n; a2n 1 для підтипу B; m 1, (N / 4 1); n 1, N / 4 . (2) Приклад. Шляхом використання (2) отримують такі послідовності. N 4(k 1) : a {1;1;1;1} для підтипу В; a {1;1;1;1} для підтипу В; N 8(k 2) : a {1;1;1;1;1;1;1;1} для підтипуА; a {1;1;1;1;1;1;1;1} для підтипуВ; N 12(k 3) : a {1;1;1;1;1;1;1;1;1;1;1;1} для підтипуА; a {1;1;1;1;1;1;1;1;1;1;1;1} для підтипуB; 10 тощо (для N 16,20,24... ). (k 1) Слід зазначити, що отримані послідовності довжини N 4 послідовностями Баркера (частинний випадок). Автокореляційна функція (АКФ) послідовностей типу 1 відповідає виразу (3). N, 0 1, для підтипу А; 1;3; 1, для підтипу В; R( ) N 0, 2 4m, m 0, 4 1; N 16, 4 15 є відомими . Повний вираз (для будь-яких значень та N ) ще не формалізовано, але важливим є те, що основна пелюстка АКФ R(0) N завжди відділена від першої великої за значенням бічної пелюстки малими за значенням бічними пелюстками (0 або±1); великі за значенням бічні , пелюстки сконцентровані між нульовими бічними пелюстками (при 2 4m , m 0,12,3... ). , Правило кодування для послідовностей типу 2(N 4k 1 , k 12,3... ): 3 UA 108898 C2 i 1; 1, m i 2m 1; ( 1) , n ( 1) a2n 1, i 2n; a , i N 1 2m; 2m , i N 2m; a ai 2m 1 iN a1, m 1, N 1 1; 4 N 1 . n 1, 4 (4). Приклад. Шляхом використання (4) отримують такі послідовності. N 3(k 1) : a {111}; ;; N 7 (k 2) : a {11 1 1111}; ;; ; ;;; N 11(k 3) : a {11 1 11 1 1 1111}; ;; ; ;; ; ; ;;; тощо (для N 15,19,23... ). 5 10 15 Слід зазначити, що отримані послідовності довжин N 3 (k 1) , N 7 (k 2) та N 11(k 3) є відомими послідовностями Баркера (частинні випадки). АКФ послідовностей типу 2 відповідає виразу (5). N, 0 N 1 0, 1 2m, m 0, 2 N3 1, 2 4k, k 0, R( ) 4 1, N 3; N 7; 0; N 12, 4; N 15; N 15 ; N 19 . N 12 4s, 4(s 1), s 1, 4 (5) Важливим є те, що основна пелюстка АКФ R(0) N завжди відділена від першої великої за значенням бічної пелюстки малими за значенням бічними пелюстками (0 або -1); великі за значенням бічні пелюстки сконцентровані при значеннях , які кратні 4 (4;8;12;…) та відділені одна від одної малими за значенням бічними пелюстками (0 або -1). , , Правило кодування для послідовностей типу 3(N 4k 1 k 12,3,...) : 1, i 1; 2m 1; N; a2m 1, i 2m; 1, для підтипу А; N 1 i ; для підтипу В; 2 1, для підтипу А; N 1 N 1 1, a i i 1; 2; для підтипу В; 2 2 1, a , i N 1 2m; 2m a2m 1, i N 2m; N5 m 1, 4 . (6) Приклад. Шляхом використання (6) отримують такі послідовності. N=5(k=l): 4 UA 108898 C2 N 4(k 1) : a {1;1;1;1;1} для підтипу A; a {1;1;1;1;1} для підтипу В; N 9(k 2) : a {1;1;1;1;1;1;1;1;1} для підтипуА; a {1;1;1;1;1;1;1;1;1} для підтипуВ; N 13(k 3) : a {1;1;1;1;1;1;1;1;1;1;1;1;1} для підтипуА; a {1;1;1;1;1;1;1;1;1;1;1;1;1} для підтипуB; , тощо (для N 17,2125... ). 5 10 15 20 25 30 Слід зазначити, що отримані послідовності довжин N 5(k 1) підтипу А та N 13(k 3) підтипу В є відомими послідовностями Баркера (частинні випадки). АКФ послідовностей типу 3 відповідає виразу (7). N, 0 N 1 0, 1 2m, m 0, 2 окрім випадку N 1 N 1 ; 2k, k 0, 1, 2 4 N 5; k 0; підтип В R( ) N5 ; N 9 для підтипу А; N 4s, 2s; s 1, 4 N 12, N 9 , 2 для підтипу В; N5 3, N 13 N 12 4n, 4 2n),n 0, 4 ; N 13 для підтипу В (7) Важливим є те, що основна пелюстка АКФ R(0) N завжди відділена від першої великої за значенням бічної пелюстки нульовими бічними пелюстками; великі за значенням бічні пелюстки сконцентровані при парних значеннях та відділені одна від одної нульовими бічними пелюстками при непарних значеннях . Запропоновані шляхом формалізації правил кодування (2), (4), (6) послідовності мають такі структурні властивості: 1) послідовності рекурентні за довжиною (при збільшенні N "нарощування" послідовності кожного підтипу або типу відбувається з середини, а початок та закінчення послідовності залишаються такими ж); 2) послідовності мають дзеркально-симетричну структуру відносно середини послідовності (наприклад, для послідовностей підтипу А типу 1 для пар "непарний елемент лівої половини парний елемент правої половини" - інверсія симетричних елементів, а для пар "парний елемент лівої половини - непарний елемент правої половини" - однакові симетричні елементи); 3) послідовності мають рекурентно-проріджену структуру (диференційовану за непарними та парними елементами лівої половини); 4) для багатьох (але не для всіх) елементів ai лівої половини послідовностей виконується рівність ai ai1ai2 ; 5) усі відомі бінарні послідовності Баркера можуть бути представлені як частинні випадки запропонованих послідовностей, а запропоновані послідовності, у свою чергу, можуть розглядатися як узагальнення та подальший розвиток класу бінарних послідовностей Баркера (примітка: послідовності Баркера довжини N 2 відповідають властивості рекурентності за довжиною та можуть бути представлені як послідовності типу 1, які не мають у своїй структурі ; ; середини: послідовність a {11} - підтип А, послідовність a {11} - підтип В). Запропоновані шляхом формалізації правил кодування (2), (4), (6) послідовності мають такі кореляційні властивості: 1) структура АКФ послідовності гребінчаста; 5 UA 108898 C2 5 10 15 20 25 30 35 2) основна пелюстка АКФ завжди відділена від першої великої за значенням бічної пелюстки однією або більше малими за значенням бічними пелюстками (0 або±1); 3) великі за значенням бічні пелюстки завжди відділені одна від іншої однією або більше малими за значенням бічними пелюстками (0 або±1); 4) є такі комбінації послідовностей, для яких результат перемноження сигналів АКФ (на виходах узгоджених фільтрів), які існують на одному і тому ж самому інтервалі часу і відповідають цим послідовностям, утворює сигнал, який подібний до сигналу АКФ з вузькою основною пелюсткою (яка дорівнює найменшій тривалості елемента серед усіх використовуваних послідовностей у комбінації) та малим рівнем бічних пелюсток (який не перевищує за модулем для деяких комбінацій використовуваних послідовностей нормованого значення 1/ Nmax , де Nmax - максимальна довжина послідовності серед використовуваних у комбінації). Оброблення прийнятих сигналів у РЛС у способі, який заявляється, ґрунтується на останній кореляційній властивості запропонованих послідовностей. Розглянемо принцип оброблення сигналів на прикладі. Нехай використовується така комбінація послідовностей: послідовність 1 N1 5 , тип 3, підтип А; послідовність 2 N2 20 , тип 1, підтип А. " N1XY H2 WZ " Для зручності позначають такі комбінації послідовностей як , де X - тип першої послідовності, Y - підтип першої послідовності (якщо вона має підтипи), W - тип другої послідовності, Z - підтип другої послідовності (якщо вона має підтипи); якщо послідовність не має підтипів, то вказують лише її тип; якщо комбінація складається з більшої кількості послідовностей, то додають відповідні складові. У прикладі, який розглядається, використовують комбінацію "53A+201A". Послідовності: N1 5 : {11111} (відома послідовність Баркера); ;; ; ; N2 20 : {11111111111111111111} . ;; ; ;; ; ; ;; ; ; ; ;; ; ; ;;; На кресленні фіг. 1 показані сигнали, що відповідають послідовностям (на однаковому інтервалі часу, наприклад 20 мкс). На кресленні фіг. 2 показані узгоджені фільтри (УФ) для сигналів послідовностей: фіг. 2,адля послідовності "53A"; фіг. 2,б - для послідовності "201А". На кресленні фіг. 3 показані АКФ послідовностей у формі сигналів після УФ (фіг. 3,а-для послідовності "53А"; фіг. 3,б - для послідовності "201А") та результат їх перемноження (фіг. 3, в; основні пелюстки АКФ приведені до нульового моменту часу). Перемноження АКФ дозволяє об'єднати переваги АКФ послідовностей, які входять до комбінації та усунути їх недоліки (з позицій структури АКФ), що показано у табл. 1. Таблиця 1 Переваги АКФ1 вузька основна пелюстка широка основна пелюстка великий рівень бічних пелюсток АКФ12 45 малий рівень бічних пелюсток АКФ2 40 Недоліки малий рівень бічних пелюсток та вузька основна пелюстка Роздільна здатність по дальності 600 м ( = 4 мкс) 150 м ( = 1 мкс) 150м( = 1 мкс) Це можливо завдяки гребінчастій структурі АКФ послідовностей у комбінації: основна пелюстка АКФ завжди відділена від першої великої за значенням бічної пелюстки однією або більше малими за значенням бічними пелюстками (0 або±1) - забезпечує вузьку основну пелюстку в результаті перемноження; великі за значенням бічні пелюстки також завжди відділені одна від іншої однією або більше малими за значенням бічними пелюстками (0 або±1); при цьому малі та великі за значенням бічні пелюстки різних АКФ частково або повністю взаємно перетинаються - забезпечує повне або часткове заглушення бічних пелюсток. Для оцінювання ефективності заглушення бічних пелюсток використовують співвідношення 6 UA 108898 C2 KC max 1/ Nmax Б АКФ12...( ) / АКФ12...(0) , (8) де Nmax - максимальна довжина послідовності у комбінації; Б max АКФ12...( ) 5 АКФ12...(0) - максимальне нормоване значення бічних перемноження. Якщо KC 1 , то максимальне нормоване значення бічних перемноження дорівнює максимальному нормованому значенню бінарної послідовності Баркера довжини Nmax (якби така існувала). комбінацій запропонованих послідовностей наведені у табл. 2. пелюсток у результаті пелюсток у результаті бічних пелюсток деякої Значення K C для деяких Таблиця 2 Комбінація «53A+201A» «53А + 201А + 401A» «112+441A» «133B+521A» «133B+521A+1041A» Ширина основної пелюстки в результаті перемноження АКФ ТС*/20 ТС/40 ТС/44 ТС/52 ГC/104 Максимальне нормоване значення бічних пелюсток в результаті перемноження АКФ 1/20 1/40 5/121 (≈ 1/24,2) 7/169 (≈ 1/24,1) 56/2197 (≈ 1/39,2) KC 1 1 0,55 0,46 0,38 *TC - тривалість сигналу 10 15 20 25 30 35 Зондувальний сигнал при цьому формують з декількох різних складових однакової тривалості, які є фазоманіпульованими сигналами, які, в свою чергу, відповідають одній з можливих комбінацій запропонованих послідовностей. У складі зондувального сигналу складові розділяють за допомогою, наприклад, поляризації, частоти, можуть бути використані багатопозиційні сигнально-кодові конструкції (PSK, FSK) тощо. Проведено комп'ютерне моделювання оброблення прийнятих сигналів у РЛС відповідно до способу, який заявляється. Вихідні дані до моделювання: 1) зондувальний сигнал містить дві складові, які відповідають комбінації запропонованих послідовностей "133B+521A" (послідовність "133B" є відомою послідовністю Баркера); 2) тривалість зондувального сигналу 13 мкс; тривалості елементів послідовностей 1 1 мкс (у послідовності "133B") та 2 0,25 мкс (у послідовності "521А"); 3) відстань до об'єкта (цілі) 3900 м; 4) діапазон робочих дальностей 1950…5775 м; 5) оброблення сигналів у приймачі РЛС починається в момент часу t 0 ; інтервал часу випромінювання зондувального сигналу t [13;0) мкс; m 0 2 4 6) на вході системи оброблення сигналів є гаусівський шум з параметрами ; ; співвідношення "сигнал/шум" становить 0,25 для кожної складової зондувального сигналу; 7) інтервал часу дискретизації t 0,025 мкс; 8) складові зондувального сигналу та відповідні ним сигнали на виході системи оброблення змодельовані та показані без високочастотного заповнення (у формі відеоімпульсів). На кресленні фіг. 4 показана система оброблення сигналів для випадку, який розглядається. , Лінія затримки 152 (0,375 мкс) використовується для суміщення у одному й тому самому моменті часу центрів основних пелюсток АКФ складових зондувального сигналу (стале значення затримки, яке не залежить від відстані до цілі). 7 UA 108898 C2 На кресленні фіг. 5 показані сигнали складових зондувального сигналу U1(t ) і U2 (t ) без шуму (фіг. 5,6, г), реалізація шуму (t ) (фіг. 5,а) та сигнали складових зондувального сигналу * U1( t ) і U* ( t ) з шумом (фіг. 5,в, д) на вході системи оброблення сигналів. 2 На кресленні фіг. 6,а, в показані сигнали S1(t ) та S2(t ) (шуму на вході немає), а на 5 * * кресленні фіг. 6,б, г - сигнали S1( t ) та S2 ( t ) (шум на вході є). Також на кресленні фіг. 6 справа наведені їх характеристики, характеристики виявлення сигналів та вимірювання відстані, якщо * * використовують лише S1( t ) або S2 ( t ) . На кресленні фіг. 7,а показаний сигнал S12 ( t ) (шуму на вході немає), а на кресленні фіг. 7,б 10 * - сигнал S12 ( t ) (шум на вході є). Також на кресленні фіг. 7 справа наведені характеристики S12 ( t ) , характеристики виявлення сигналів та вимірювання відстані, якщо використовують * S12 ( t ) . 15 20 25 Результати моделювання показують, що спосіб, який заявляється, дозволяє підвищити точність виявлення сигналів у РЛС. Наприклад, для отриманих результатів моделювання при сталій тривалості зондувального сигналу досягається нижченаведене покращення показників у порівнянні з використанням в структурі зондувального сигналу лише послідовності Баркера N 13 (яку використовують, наприклад, в структурі зондувального сигналу для діапазону робочих дальностей З…10 км у аеродромній РЛС ASR-22/AL): ширина основної пелюстки зменшується в 4 рази - забезпечує підвищення роздільної здатності по дальності в 4 рази; рівень бічних пелюсток зменшується у 1,85 рази; середнє значення похибки вимірювання відстані зменшується в 19,22 разу (при співвідношенні "сигнал/шум" 0,25). При підвищенні вищезазначених показників також в 4 рази збільшується ширина спектра зондувального сигналу. ФОРМУЛА ВИНАХОДУ 30 35 Спосіб підвищення точності виявлення сигналів у радіолокаційних системах зі складними зондувальними сигналами, який полягає в тому, що в процесі оброблення відбитого зондувального сигналу одночасно зменшують рівень бічних пелюсток та ширину основної пелюстки автокореляційної функції, що дозволяє підвищити відповідно якість розпізнавання при дії завад та роздільну здатність по дальності, який відрізняється тим, що у передавальному пристрої радіолокаційної станції зондувальний сигнал формують з двох або більше різних складових однакової тривалості, які є фазоманіпульованими сигналами та які формують відповідно до бінарних послідовностей , елементи яких визначають за правилами i 1; 1, m i 2m 1; ( 1) , n ( 1) a2n 1, i 2n; a для підтипуА; ai 2n i N 1 2n; a2n для підтипуВ; a 2n 1 для підтипуА; i N 2 2n; a2n 1 для підтипуB; m 1, (N / 4 1); n 1,N / 4 , якщо бінарна послідовність є послідовністю підтипу А або послідовністю підтипу В типу 1 довжиною N 4k , де k - натуральне число, 8 UA 108898 C2 i 1; 1, m i 2m 1; ( 1) , n ( 1) a 2n 1, i 2n; a для підтипуА; ai 2n i N 1 2n; a 2n для підтипуВ; для підтипуА; a 2n 1 i N 2 2n; a 2n 1 для підтипуB; m 1, (N / 4 1); n 1, N / 4 5 10 якщо бінарна послідовність є послідовністю типу 2 довжиною N 4k 1 , де k - натуральне число, 1, i 1; 2m 1; N a 2m 1, i 2m; 1, для підтипу А; N 1 i ; 2 для підтипу В; 1 для підтипу А; N 1 N 1 1, a i i 1; 2; , 2 2 1 для підтипу В; a , i N 1 2m; 2m i N 2m; a 2m 1, N5 m 1, 4 якщо бінарна послідовність є послідовністю підтипу А або послідовністю підтипу В типу 3 довжиною N 4k 1 , де k - натуральне число, у приймальному пристрої радіолокаційної станції здійснюють оброблення кожної складової відбитого зондувального сигналу з використанням узгодженої фільтрації, здійснюють затримки в часі результатів узгодженої фільтрації складових відбитого зондувального сигналу таким чином, щоб сумістити в одному й тому самому моменті часу центри всіх основних пелюсток автокореляційних функцій складових зондувального сигналу, здійснюють перемноження результатів узгодженої фільтрації складових відбитого зондувального сигналу з суміщеними в одному й тому самому моменті часу центрами всіх основних пелюсток автокореляційних функцій складових зондувального сигналу, результат перемноження використовують для подальшого отримання радіолокаційної інформації. 9 UA 108898 C2 10 UA 108898 C2 11 UA 108898 C2 12 UA 108898 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 13
ДивитисяДодаткова інформація
Автори англійськоюHolubnychyi Oleksii Heorhiiovych, Konakhovych Heorhii Fylymonovych
Автори російськоюГолубничий Алексей Георгиевич, Конахович Георгий Филимонович
МПК / Мітки
МПК: G01S 7/36
Мітки: сигналами, складними, сигналів, підвищення, виявлення, радіолокаційних, системах, зондувальними, спосіб, точності
Код посилання
<a href="https://ua.patents.su/15-108898-sposib-pidvishhennya-tochnosti-viyavlennya-signaliv-u-radiolokacijjnikh-sistemakh-zi-skladnimi-zonduvalnimi-signalami.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення точності виявлення сигналів у радіолокаційних системах зі складними зондувальними сигналами</a>
Пристрій виявлення косинусоїдальних цифрових і радіолокаційних сигналів
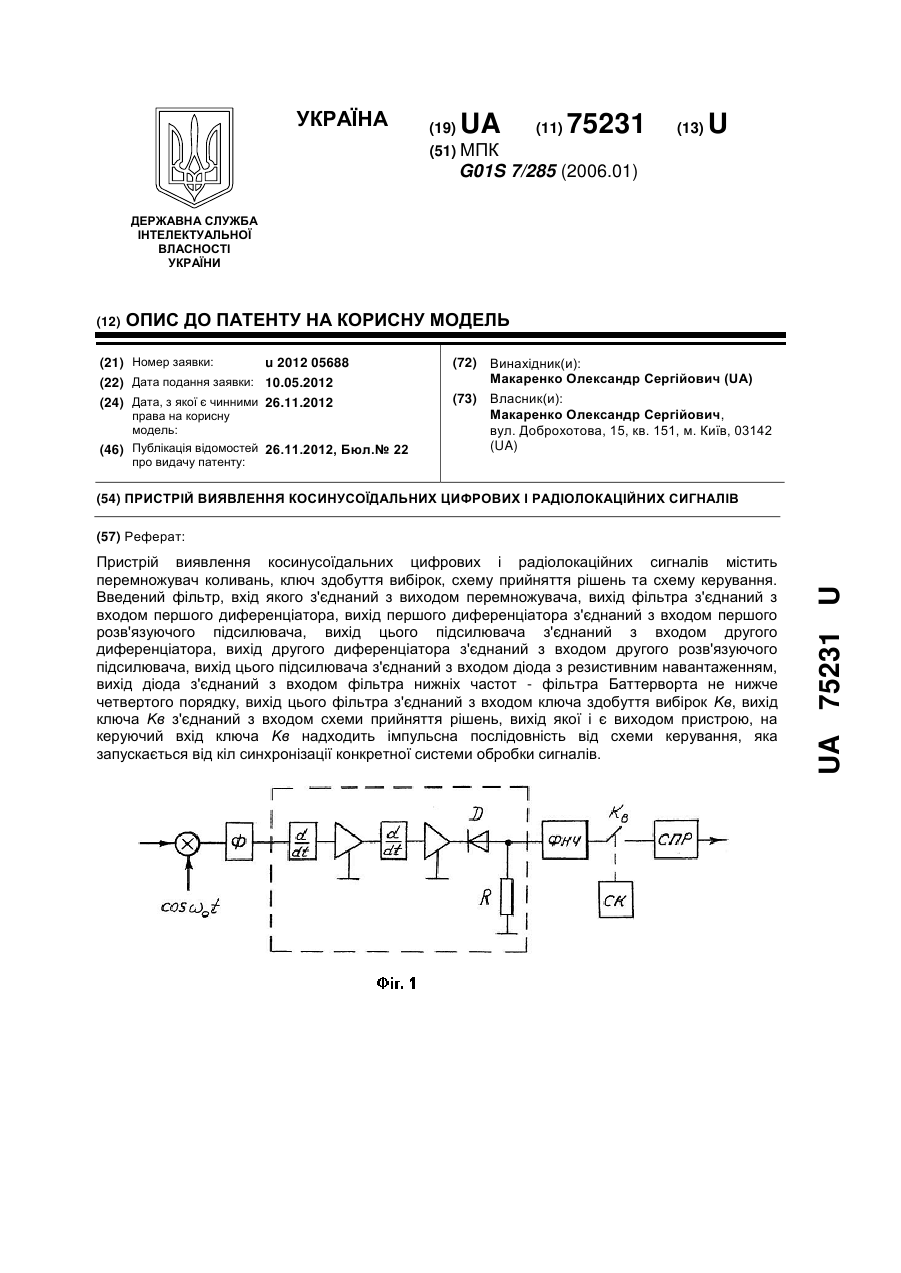
Номер патенту: 75231
Опубліковано: 26.11.2012
Автор: Макаренко Олександр Сергійович
МПК: G01S 7/285
Мітки: виявлення, радіолокаційних, косинусоїдальних, сигналів, пристрій, цифрових
Формула / Реферат:
Пристрій виявлення косинусоїдальних цифрових і радіолокаційних сигналів, що містить перемножувач коливань, ключ здобуття вибірок, схему прийняття рішень та схему керування, який відрізняється тим, що в нього введений фільтр, вхід якого з'єднаний з виходом перемножувача, вихід фільтра з'єднаний з входом першого диференціатора, вихід першого диференціатора з'єднаний з входом першого розв'язуючого підсилювача, вихід цього підсилювача з'єднаний...
Пристрій виявлення косинусоїдальних цифрових і радіолокаційних сигналів
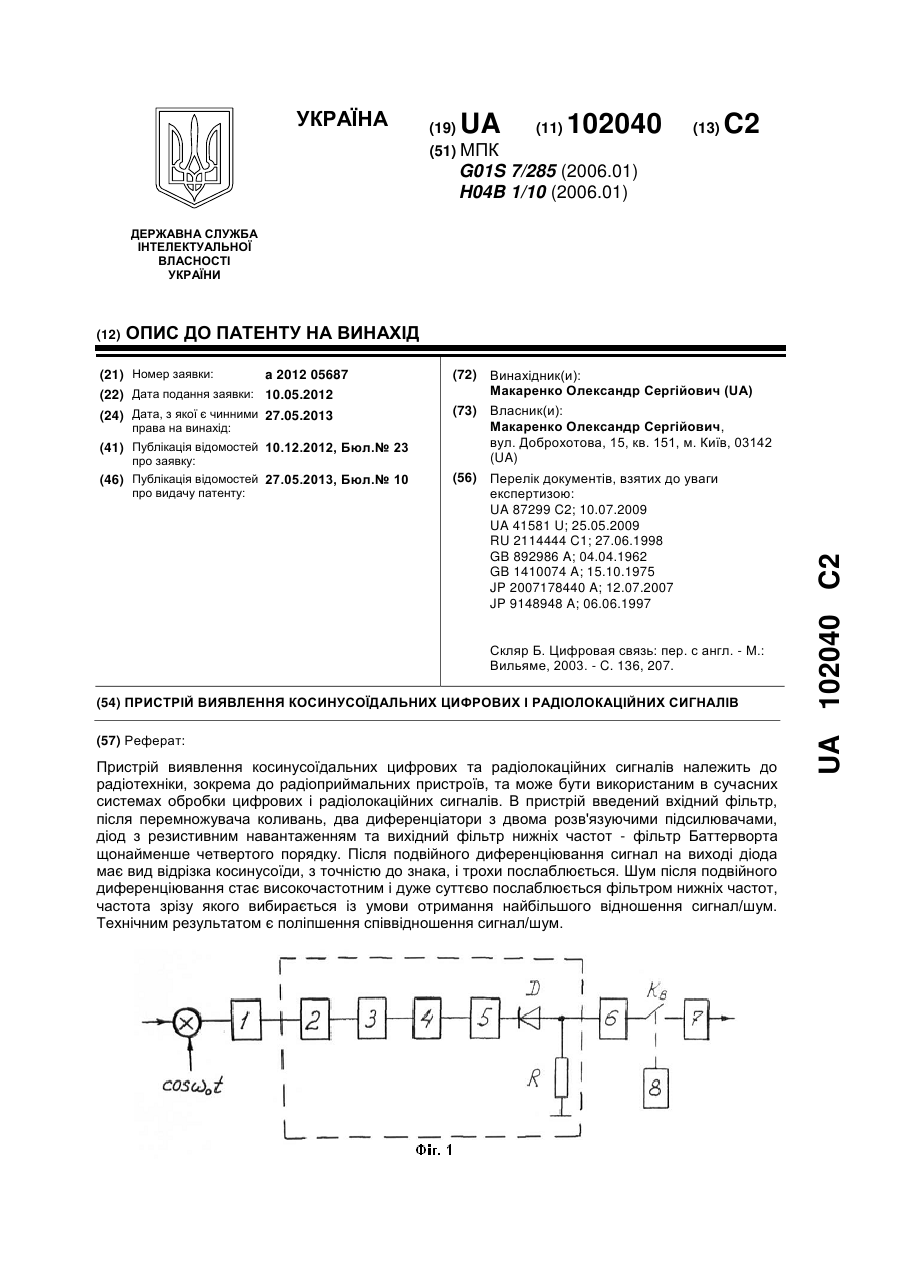
Номер патенту: 102040
Опубліковано: 27.05.2013
Автор: Макаренко Олександр Сергійович
МПК: H04B 1/10, G01S 7/285
Мітки: пристрій, косинусоїдальних, сигналів, цифрових, виявлення, радіолокаційних
Формула / Реферат:
Пристрій виявлення косинусоїдальних цифрових і радіолокаційних сигналів, що містить перемножувач коливань, ключ одержання вибірок, схему прийняття рішень та схему керування, який відрізняється тим, що в нього додатково введено фільтр, блок обробки, який містить два диференціатори з двома розв'язуючими підсилювачами, діод з резистивним навантаженням та фільтр нижніх частот, який являє собою фільтр Баттерворта щонайменше четвертого порядку,...
Спосіб підвищення точності вимірювань несучої частоти сигналів багатоканальним вимірником
Номер патенту: 28738
Опубліковано: 25.12.2007
Автори: Альошин Геннадій Васильович, Богданов Юрій Олексійович
МПК: G01S 3/00
Мітки: вимірником, спосіб, багатоканальним, частоти, сигналів, підвищення, несучої, вимірювань, точності
Формула / Реферат:
Спосіб підвищення точності вимірювань несучої частоти сигналів багатоканальним вимірником, що містить набір каналів, що перекриваються по частоті - фільтрів з амплітудними детекторами і граничними пристроями, і перший атенюатор на вході вимірника, який відрізняється тим, що в нього вводять послідовно додатковий відліковий атенюатор, розрахований на загасання, що не перевищує вибірковості по сусідньому каналу, і відградуйований у значеннях...
Пристрій синхронізації в системах зв’язку з шумовими сигналами

Номер патенту: 67760
Опубліковано: 12.03.2012
Автори: Первунінський Станіслав Михайлович, Вовченко Олександр В'ячеславович
МПК: H04L 7/00
Мітки: зв'язку, синхронізації, сигналами, системах, шумовими, пристрій
Формула / Реферат:
Пристрій синхронізації в системах зв'язку з шумовими сигналами, що містить на стороні передавача генератор широкосмуговоого шуму, вихід якого з'єднаний з смуговим фільтром, вихід якого з'єднаний з входом суматора та входом першого блока лінії затримки, вихід першого блока лінії затримки розгалужується на дві лінії, перша з яких з'єднана з першим входом першого блока перемноження, другий вхід якого з'єднаний з виходом генератора...
Спосіб подачі радіолокаційних сигналів протидії активним перешкодам
Номер патенту: 72365
Опубліковано: 10.08.2012
Автори: Чекед Ігор Володимирович, Добровольський Юзеф Броніславович, Соломатін Дмитро Олександрович, АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ, Семененко Олег Михайлович, Власко Олександр Миколайович, Водчиць Олександр Григорович
МПК: G01S 7/537
Мітки: протидії, спосіб, подачі, перешкодам, активним, радіолокаційних, сигналів
Формула / Реферат:
Спосіб подачі радіолокаційних сигналів протидії активним перешкодам, за яким випромінюють радіолокаційний сигнал в повітряний простір, виявляють інші рухомі повітряні об'єкти, визначають інші задані рухомі повітряні об'єкти, визначають відстань до іншого заданого рухомого повітряного об'єкта з засобом створення активних перешкод та швидкість його руху залежно від заданого кутового розміру направлення проміння радіолокаційного сигналу,...
Попередній патент: Пристрій для оцінки триботехнічних властивостей плунжерних пар паливного насоса високого тиску
Наступний патент: Пристрій для дистанційної реєстрації вертикального профілю температури атмосферного повітря
Випадковий патент: Спосіб лікування дорослих хворих з посттравматичними стресовими розладами