Пружна опора
Номер патенту: 17151
Опубліковано: 18.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович, Цілина Владислав Володимирович
Формула / Реферат
1. Упругая опора, содержащая втулку для установки вала вращающегося элемента станка со сквозными пазами, равномерно расположенными по окружности, отличающаяся тем, что пазы выполнены радиальными, в них размещены упруго поджатые в радиальном направлении вкладыши, причем паз с упруго поджатым в нем вкладышем образуют упругий элемент упругой опоры, при этом по крайней мере одна пара упомянутых упругих элементов, размещенных по полуосям и системы координат начало которой лежит на оси симметрии внутренней поверхности втулки, выполнена с возможностью регулировки силы давления на вкладыши в радиальном направлении с помощью пьезостолбов, при этом упругая опора снабжена датчиками величины перемещения по осям и установленными по полуосям и системы координат начало которой лежит на оси симметрии внутренней поверхности втулки, а оси системы координат параллельны осям системы координат причем датчики и величины перемещения по осям и через блок управления электрически связаны с пьезостолбами упругих элементов с регулируемой силой давления на вкладыши в радиальном направлении, выполненными по полуосям и системы координат соответственно, причем блок управления включает измерители величины перемещения по осям и интеграторы выходных сигналов измерителей величины перемещения по осям и переключатель "опорное - работа", аналого-цифровые преобразователи напряжения и схемы клапанов кода постоянной составляющей сигнала величины смещения по осям и регистр хранения кода постоянной составляющей, кнопку "Старт", схемы клапанов, цифроаналоговые преобразователи, дифференциальные усилители сигналов погрешности положения конуса прецессии оси вращения вала по оси и по оси причем датчик величины перемещения по оси соединен со входом измерителя величины перемещения по оси датчик величины перемещения по оси соединен со входом измерителя величины перемещения по оси выходы измерителей величины перемещения по осям и соединены со входами интеграторов выходного напряжения измерителей величины перемещения по осям и выход интегратора выходного напряжения измерителя величины перемещения по оси через переключатель "опорное - работа" в положении "опорное" соединен с информационным входом аналого-цифрового преобразователя напряжения а в положении "работа" соединен со вторым входом дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси выход интегратора выходного напряжения измерителя величины перемещения по оси через переключатель "опорное - работа" в положении "опорное" соединен с информационным входом аналого-цифрового преобразователя а в положении "работа" соединен со вторым входом дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси источник постоянного напряжения через кнопку "Старт" соединенс сигнальными входами аналого-цифровых преобразователей напряжений и информационный выход аналого-цифрового преобразователя напряжения соединен с информационным входом первой схемы клапанов, а его сигнальный выход соединен с сигнальным входом первой схемы клапанов, информационный выход аналого-цифрового преобразователя напряжения соединен с информационным входом второй схемы клапанов, а его сигнальный выход соединен с сигнальным входом второй схемы клапанов, выход первой схемы клапанов соединен с входом регистра хранения кода опорного напряжения выход второй схемы клапанов соединены с входом регистра хранения кода опорного напряжения выход регистра хранения кода опорного напряжения соединен с входом цифро-аналогового преобразователя, а его выход соединен с первым входом дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси выход регистра хранения кода опорного напряжения соединен с входом цифроаналогового преобразователя, а его выход соединен с первым входом дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси выходы дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси соединены с пьезостолбами упругих элементов с регулируемой силой давления на вкладыши в радиальном направлении, установленными по полуоси системы координат а выходы дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси соединены с пьезостолбами упругих элементов с регулируемой силой давления на вкладыши в радиальном направлении, установленными по полуоси - системы координат
2. Упругая опора по п.1, отличающаяся тем, что она дополнительно снабжена корпусом, охватывающим втулку, в отверстиях которого установлены введенные в устройство цилиндрические втулки с размещенными в них толкателями поджатыми с помощью регулировочных винтов и пьезостолбов к коромыслам, одни концы которых закреплены с возможностью поворота на стойках, укрепленных во втулке опоры, а другие взаимодействуют с направляющими шайбами, размещенных в радиальных пазах втулки и упруго поджатыми к упомянутым вкладышам упругих элементов, а датчики величины перемещения по осям и системы координат через блок управления электрически соединены с пьезостолбами, расположенными по одноименным осям системы координат
Текст
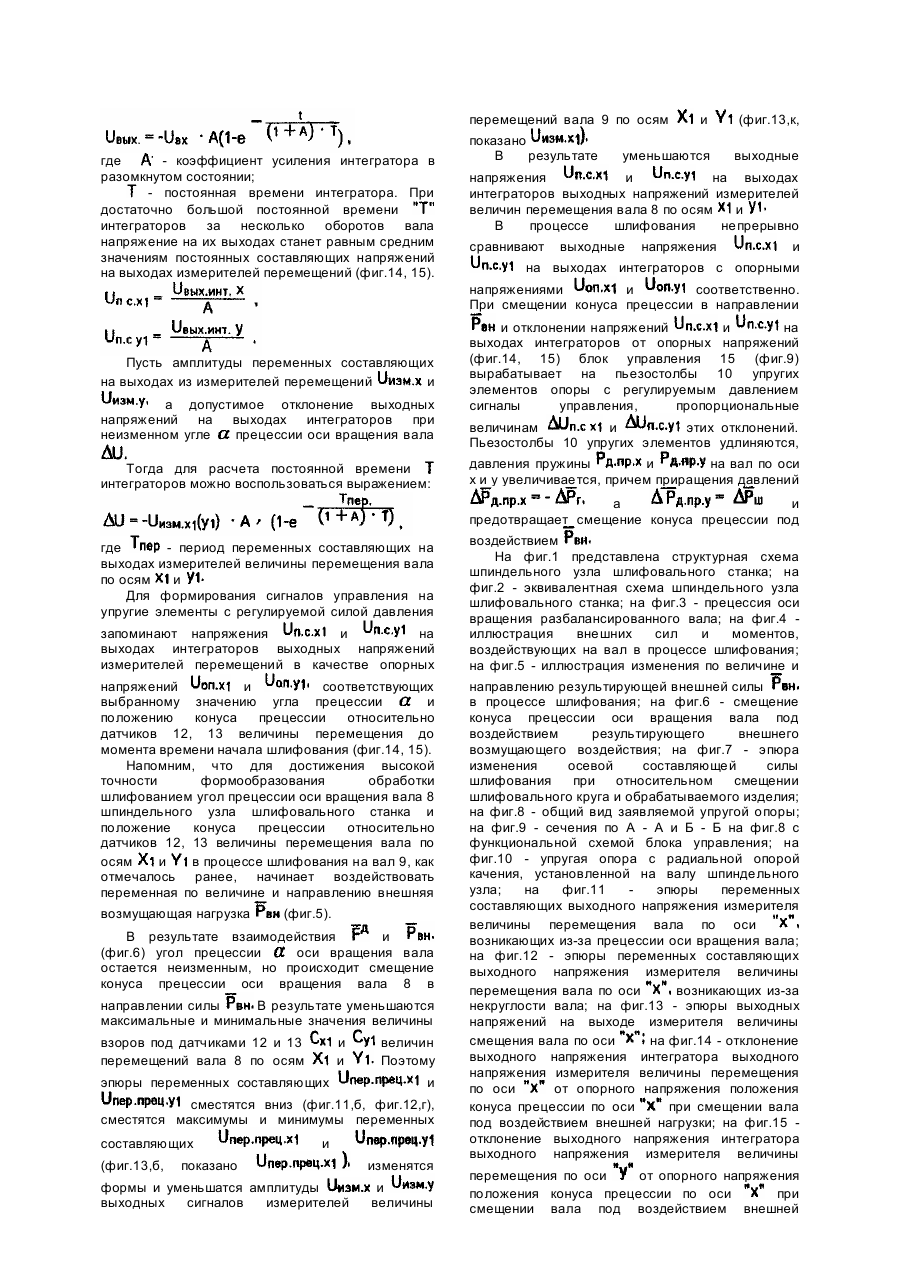
Изобретение относится к станкостроению и может быть использовано при конструировании шпиндельных узлов шлифовальных станков. Известна упругая опора (А.с. СССР №406048, кл. F16C27/04, опубл. 05.11.73, Бюл. №4), выполненная в виде втулки для установки вала вращающегося элемента станка и имеющая концентрические ряды сквозных пазов, равномерно расположенных по окружности. С целью повышения виброустойчивости конец каждого паза соединен с началом другого, расположенного на соседнем концентрическом ряду. Причем втулка опоры может служить вкладышем подшипника скольжения или выполнена в виде кольца подшипника качения. Использование упругой опоры в шпиндельных узлах шлифовальных станков позволяет достичь эффекта самоцентрирования вала в зоне рабочих скоростей, несмотря на наличие статической и динамической неуравновешенности вала, и существенно повысить точность формообразования. Недостатком упругой опоры по прототипу является то, что жесткость такой опоры имеет определенное постоянное значение. Поэтому, например, при увеличении нагрузки на вал он может выходить из самоцентровки. В общем случае при изменении нагрузки на вал он может изменять свое положение в упругой опоре, что снижает точность формообразования при обработке шлифованием. Отсутствие возможности управлять жесткостью этой опоры влечет за собой отрицательные последствия и при использовании ее в шпиндельных узлах станков сверхглубокого шлифования. Это объясняется тем, что в шпиндельных узлах станков сверхглубокого шлифования один конец вала установлен в упругой радиальной опоре качения. При этом вал статически разбалансирован, а жесткость упругой радиальной выбирают такой, чтобы в зоне рабочих скоростей не допустить самоцентровки вала шпиндельного узла. В результате ось вращения вала шпиндельного узла станка сверхглубокого шлифования прецессирует с заданным углом прецессии при вершине конуса прецессии. Прецессия оси вращения вала с заданным углом при вершине конуса прецессии является основным фактором, обеспечивающим эффект сверхбыстрого шлифования. В процессе сверхглубокого шлифования из-за износа шлифовального инструмента, неравномерности подачи, изменения глубины шлифования, неоднородности материала обрабатываемого изделия, изменения осевой составляющей силы шлифования при изменении относительного положения шлифовального инструмента и обрабатываемого изделия изменяется нагрузка на вал шпиндельного узла. В результате, если жесткость упругой опоры постоянна, под воздействием переменной нагрузки изменяется положение в пространстве конуса прецессии оси вращения вала шпиндельного узла, что приводит к увеличению погрешности формообразования при обработке шлифованием, Для повышения точности формообразования станков сверхглубокого шлифования в шпиндельных узлах этих станков следует использовать упругие радиальные опоры с управляемой по величине и направлению жесткостью. Это позволит, изменяя жесткость опоры по величине и направлению в зависимости от величины и направления внешней нагрузки, предотвратить смещение конуса прецессии оси вращения вала шпиндельного узла и существенно повысить точность формообразования станков сверхглубокого шлифования. В основу изобретения поставлена задача такого совершенствования конструкции упругой опоры, при котором за счет снабжения ее регулируемыми в автоматическом режиме упругими элементами обеспечивается возможность управления жесткостью упругой опоры по величине и направлению в зависимости от величины и направления воспринимаемых этой опорой нагрузок (т.е. в динамике), вследствие чего значительно повышается точность формообразования станков, особенно сверхглубокого шлифования, в которых, как правило, используются упругие опоры. Для решения этой задачи в упругой опоре, содержащей втулку для установки вала вращающегося элемента станка со сквозными пазами, равномерно расположенными по окружности, согласно изобретению пазы выполнены радиальными, в них размещены упруго поджатые в радиальном направлении вкладыши, причем, паз с упруго поджатым в нем вкладышем образуют упругий элемент упругой опоры, при этом по крайней мере одна пара упомянутых упругих элементов, размещенных по полуосям и системы координат начало которой лежит на оси симметрии внутренней поверхности втулки, выполнена с возможностью регулировки силы давления на вкладыши в радиальном направлении с помощью пьезостолбов, при этом упругая опора снабжена датчиками величины перемещения по осям и установленными по полуосям и системы координат начало которой лежит на оси симметрии внутренней поверхности втулки, а оси системы координат параллельны осям системы координат причем датчики и величины перемещения по осям и через блок управления электрически связаны с пьезостолбами упругих элементов с регулируемой силой давления на вкладыш в радиальном направлении, выполненными по полуосям и системы координат соответственно, причем, блок управления включает измерители величины перемещения по осям и интеграторы выходных сигналов измерителей величины перемещения по осям и переключатель "опорное - работа", аналогоцифровые преобразователи напряжения и схемы клапанов кода постоянной составляющей сигнала величины смещения по осям и регистр хранения кода постоянной составляющей, кнопку "Старт", схемы клапанов, цифро-аналоговые преобразователи, дифференциальные усилители сигналов погрешности положения конуса прецессии оси вращения вала по оси и по оси а датчик величины перемещения по оси соединен со входом измерителя величины перемещения по оси датчик величины перемещения по оси соединен со входом измерителя величины перемещения по оси выходы измерителей величины перемещения по осям и соединены со входами интеграторов выходного напряжения измерителей величины перемещения по осям и выход интегратора выходного напряжения измерителя величины перемещения по оси через переключатель "опорное - работа" в положении "опорное" соединен с информационным входом аналого-цифрового преобразователя напряжения а в положении "работа" соединен со вторым входом дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси выход интегратора выходного напряжения измерителя величины перемещения по оси через переключатель "опорное - работа" в положении "опорное" соединен с информационным входом аналого-цифрового преобразователя а в положении "работа" соединен со вторым входом дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси источник постоянного напряжения через кнопку "Старт" соединен с сигнальными входами аналого-цифровых преобразователей напряжения и информационный выход аналого-цифрового преобразователя напряжения соединен с информационным входом первой схемы клапанов, а его сигнальный выход соединен с сигнальным входом первой схемы клапанов, информационный выход аналого-цифрового преобразователя напряжения соединен с информационным входом второй схемы клапанов, а его сигнальный выход соединен с сигнальным входом второй схемы клапанов, выход первой схемы клапанов соединен с входом регистра хранения кода опорного напряжения выход второй схемы клапанов соединен с входом регистра хранения кода опорного напряжения выход регистра хранения кода опорного напряжения соединен с входом цифроаналогового преобразователя, а его выход соединен с первым входом дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси выход регистра хранения кода опорного напряжения соединен с входом цифроаналогового преобразователя, а его выход соединен с первым входом дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси выходы дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси соединены с пьезостолбами упругих элементов с регулируемой силой давления на вкладыши в радиальном направлении, установленными на полуоси системы координат а выходы дифференциального усилителя сигнала погрешности положения конуса прецессии оси вращения вала по оси соединены с пьезостолбами упругих элементов с регулируемой силой давления на вкладыши в радиальном направлении, установленными на полуоси системы координат Решение задачи достигается также тем, что упругая опора дополнительно снабжена корпусом, охватывающим втулку, в отверстиях которого установлены введенные в устройство цилиндрические втулки с размещенными в них толкателями, поджатыми с помощью регулировочных винтов и пьезостолбов к коромыслам, одни концы которых закреплены с возможностью поворота на стойках, укрепленных во втулке опоры, а другие взаимодействуют с направляющими шайбами, размещенных в радиальных пазах втулки и упруго поджатыми к упомянутым вкладышам упругих элементов, а датчики величины перемещения по осям и системы координат через блок управления электрически соединены с пьезостолбами,расположенными по одноименным осям системы координат Причинно-следственная связь между совокупностью признаков заявляемого технического решения и достигаемыми техническими результатами состоит в следующем. На фиг.1 представлена структурная схема шлифовального узла шлифовального станка сверхглубокого шлифования, обеспечивающего снятие за один проход припуска толщиной до 5мм. Шпиндельный узел включает упругую радиальную опору 40 с жесткостью упругую осевую опору 41 с жесткостью и радиальную опору 7 качения, которая удерживает в радиальном направлении хвостовик вала 8 шпиндельного узла. Эквивалентная схема этого шпиндельного узла представлена на фиг.2. Схема включает упругую радиальную опору 40 с жесткостью причем где радиальная составляющая жесткости упругой осевой опоры 41 пересчитанная к плоскости установки упругой радиальной опоры 40, а радиальная опора качения заменена шарнирами 42, так как в процессе шлифования не препятствует прецессии оси вращения вала 8, если угол прецессии не превышает 2 - 4 угловых минут (фиг.3). Эффект сверхглубокого шлифования достигается за счет прецессии оси вращения вала 9 шпиндельного узла в указанных выше пределах. Для обеспечения в процессе шлифования прецессии оси вращения вала 8 вал 8 шпиндельного узла разбалансируют. Режим работы шпиндельного узла (угол прецессии оси вращения вала) задают следующим образом. Пусть шлифование осуществляют с угловой скоростью - вес вала. Фиксируют положение балансировочных грузиков и рассчитывают расстояние центра масс вала 8 от плоскости шлифования (фиг.4) и величину смещения этого центра масс от оси вращения (эксцентриситет Пересчитывают жесткость упругой радиальной опоры 40 к плоскости, перпендикулярной оси вращения вала шпиндельного узла и проходящей через центр масс вала Пусть жесткость упругой радиальной опоры 40, приведенная к упомянутой плоскости центра масс вала, равна Для полученных значений и величину смещения (фиг.4) оси вращения рассчитывают вала 8 в упругих опорах и по формуле (Бать М.И. и др. Теоретическая механика в примерах и задачах. - Т.2. - М.: Наука. - С.279) где - масса вала. По полученному значению рассчитывают угол прецессии оси вращения вала шпиндельного узла шлифовального станка сверхглубокого шлифования. Если полученное значение угла выходит за допустимое значение, например, изменяют разбалансировку вала (значение эксцентриситета и методом последовательных приближений достигают требуемое значение угла Рассмотрим поведение вала 8 в процессе шлифования. Пусть радиальная составляющая силы шлифования (фиг.4) приложена к шлифовальному инструменту 44 и совпадает по направлению с полуосью системы координат а осевая составляющая силы шлифования параллельна геометрической оси вращения вала и направлена по направлению полуоси этой системы координат. Тогда момент внешних сил неподвижной точки где - момент инерции вала шпиндельного узла. На основании третьего закона Ньютона в момент начала прецессии вектора момента количеств движения (вала шпиндельного узла) с угловой скоростью вал-гироскоп шлифовальным инструментом воздействует на заготовку (шлифовальным инструментом 44) с силой равной по модулю и противоположной по направлению силе шлифования момент этой относительно неподвижной точки величине и противоположен по моменту силы равен по направлению и называется гироскопическим По мере роста величины прецессии (угла поворота) вала 8 в направлении вектора вокруг неподвижной точки увеличивается противодействие повороту вала 8 со стороны упругой радиальной опоры 40 с жесткостью и в какой-то момент времени вал остановится. Следовательно, равный по величине моменту внешних сил уравновешивается моментом упругой радиальной (с жесткостью ). Поэтому (фиг.4) где - реакция упругой радиальной опоры относительно (фиг.4) Поэтому Причем, где и - расстояния от неподвижной точки линии действия соответствующей силы. совпадает по направлению с до направлением полуоси Таким образом в момент времени начала шлифования на вал Момент приложен к валу в точке лежит (фиг.4) в плоскости и совпадает по направлению с направлением полуоси 8 начинает воздействовать которая в зависимости от соотношения сил и изменяется по величине и направлению, но в границах четвертого квадранта (фиг.5) системы координат Как упоминалось ранее, до начала шлифования ось вращения вала 8 прецессирует с углом прецессии (фиг.3) под воздействием динамической нагрузки из-за разбалансированности вала 8. Следовательно, в процессе шлифования в каждый момент времени положение оси вращения Под действием момента внешних сил вал 8 будет поворачиваться вокруг точки в вертикальной плоскости системы координат (фиг.4) в направлении силы шлифования (в силу малости перемещения можно считать, что вал перемещается (фиг.5) в направлении полуоси равной геометрической сумме сил и (фиг.4) Вал шпиндельного узла шлифовального станка, как и всякое быстро вращающееся тело, при воздействии на него внешних сил проявляет свойства гироскопа. Поэтому при воздействии на вал 9 упоминавшегося момента внешних сил конец вектора момента количеств движения (фиг.4) будет перемещаться в направлении момента (главного) внешних сил со скоростью равной моменту внешних сил Угловая скорость вектора момента количеств движения рассчитывается по формуле вала 8 определяется результирующей двух сил: нагрузкой на вал 8 1) (фиг.6) динамической вращающаяся синхронно с валом 8; 2) равнодействующая внешних сил В том случае, если постоянна по величине и направлению, происходит смещение на постоянную величину (фиг.6) окружности, по которой перемещается конец оси вращения вала 8. Такое смещение не вносит погрешности в обработку шлифованием. Реально сила изменяется по величине и направлению. Это объясняется тем; что из-за неравномерности подачи неоднородности обрабатываемого материала, изменения глубины шлифования и износа шлифовального инструмента в каждый момент времени принимает новое значение радиальная составляющая силы шлифования, а осевая составляющая силы шлифования при изменении относительного расположений обрабатываемого изделия 44 и шлифовального инструмента 43 изменяется, например, по закону, показанному на фиг.7. Причем изменяется не только величина, но и точка приложения этой силы (фиг.4) перемещается по диаметру шлифующего инструмента 43. Следовательно, изменяется по величине и направлению момент этой силы. Поэтому конец оси вращения вала 8 прецессирует по смещенной окружности (фиг.6) положения в пространстве, которое в каждый момент времени случайным образом. Смещение в пространстве конуса прецессии оси вращения вала приводит к увеличению погрешности формообразования при обработке шлифованием. Устранить этот недостаток и повысить точность обработки можно с помощью предлагаемой упругой опоры. Эта упругая опора представлена на фиг.8. Опора включает втулку 1 в сечении по А - А, которой в радиальном направлении и равномерно по окружности выполнены пазы 2 (фиг.9, 16, 17). В каждом пазу 2 размещены вкладыши 3, пружина 4, регулировочный винт 5. Следовательно, если в полости втулки 1 (фиг.10) помещен вал 8 с установленным на нем радиальным подшипником 7 (радиальной опорой качения), вкладыш 3, с помощью регулировочного винта 5 может быть упруго поджат к внешней обойме б радиальной опоры качения 7. Паз 2 с размещенным в нем вкладышем 3, пружиной 4, регулировочным винтом 6 является упругим элементом опоры. В двух пазах опоры, выполненных во втулке по полуосям и (фиг.9) системы координат начало которой лежит на оси симметрии внутренней поверхности втулки и ограничивающих четвертый квадрант, в пределах которого по величине и направлению изменяется результирующая внешняя нагрузка на вал дополнительно между упорными шайбами 9 и регулировочными винтами 5 установлены пьезостолбы, изменяющие свою длину при подаче на них управляющего напряжения. Паз 2 с размещенным в нем вкладышем 3, пружиной 4, пьезостолбом 10, регулировочным винтом 5 является упругим элементом опоры с регулируемым давлением. В сечении по Б - Б опоры по полуосям и системы координат, оси координат которой параллельны осям системы координат лежащей в сечении по Б - Б (фиг.8) опоры, установлены датчики 12 и 13, и величины перемещения, которые, например, если в полости втулки 1 опоры размещена установленная на валу 8 радиальная опора 7 качения, предназначены для измерения величины смещения вала 8 опоры по осям и системы координат Причем датчики 12 и 13 величины перемещения через блок управления 14 (фиг.9) электрически связаны с пьезостолбами 10 упругих элементов с регулируемой силой давления. Зададим валу 8 шпиндельного узла шлифовального станка, оснащенного предлагаемой опорой, вращение с номинальной угловой скоростью В силу того, что жесткость предлагаемой опоры одинакова по всем направлениям, ось вращения вала 8 из-за его разбалансированности под воздействием динамической нагрузки, приложенной к центру масс вала, до момента времени начала шлифования будет прецессировать с постоянным углом прецессии (фиг.3). Рассмотрим выходное напряжение на выходе измерителя величины перемещения вала по оси соединенного с датчиком 12 величины перемещения, установленным по полуоси системы координат (фиг.9). Пусть на угле поворота вала 8 вектор динамической нагрузки совпадает по направлению с полуосью Следовательно, на угле поворота вала величина зазора под датчиком 12 (от основания датчика 12 до поверхности вала 9) будет минимальна, на угле поворота максимальна, на угле поворота и принимает промежуточные значения. Поэтому одному обороту вала 9 соответствует один период переменной составляющей (фиг.11,а) выходного напряжения измерителя перемещения величины перемещения, возникающей из-за прецессии оси вращения вала 8 шпиндельного узла. Кроме того, вал 8 шпиндельного узла изготавливается с погрешностями размеров и формы. Поэтому, как правило, сечение вала 8 по Б - Б - эллипс. Предположим, что вал 8 вращается без смещения. Тогда одному обороту вала 8 соответствует два периода переменной составляющей выходного напряжения измерителей величины перемещения (фиг.12,в), возникающей из-за некруглости вала 8. Причем амплитуда этой переменной составляющей постоянна и определяется соотношением полуосей эллипса в сечении Б - Б. В результате наложения названных переменных составляющих выходное напряжение измерителя величины перемещения по сигналу датчика 12 представляет собой периодическое напряжение (рис.13,ж) с периодом Такой же вид имеет выходное напряжение на выходе измерителя величины перемещения по сигналу датчика 13 Средние значения напряжений и на выходах измерителей перемещений (фиг.13) соответствуют определенному значению угла прецессии оси вращения вала 9 шпиндельного узла и положению конуса прецессии относительно датчиков величины перемещения. Для выделения средних значений напряжений на выходах измерителей величины перемещения вала по осям и подадим выходные напряжения и измерителей величины перемещения на входы интеграторов. Как известно (Чесноков А.А. Решающие усилители. - Л.: Энергия, 1969. - С.45), напряжения на выходе интегратора изменятся по закону перемещений вала 9 по осям где - коэффициент усиления интегратора в разомкнутом состоянии; - постоянная времени интегратора. При достаточно большой постоянной времени интеграторов за несколько оборотов вала напряжение на их выходах станет равным средним значениям постоянных составляющих напряжений на выходах измерителей перемещений (фиг.14, 15). показано В результате и (фиг.13,к, уменьшаются выходные напряжения и на выходах интеграторов выходных напряжений измерителей величин перемещения вала 8 по осям и В процессе шлифования непрерывно сравнивают выходные напряжения и на выходах интеграторов с опорными напряжениями и соответственно. При смещении конуса прецессии в направлении Пусть амплитуды переменных составляющих на выходах из измерителей перемещений и а допустимое отклонение выходных напряжений на выходах интеграторов при неизменном угле прецессии оси вращения вала Тогда для расчета постоянной времени интеграторов можно воспользоваться выражением: и отклонении напряжений и на выходах интеграторов от опорных напряжений (фиг.14, 15) блок управления 15 (фиг.9) вырабатывает на пьезостолбы 10 упругих элементов опоры с регулируемым давлением сигналы управления, пропорциональные величинам и этих отклонений. Пьезостолбы 10 упругих элементов удлиняются, давления пружины и на вал по оси x и y увеличивается, причем приращения давлений а и предотвращает смещение конуса прецессии под где - период переменных составляющих на выходах измерителей величины перемещения вала по осям и Для формирования сигналов управления на упругие элементы с регулируемой силой давления запоминают напряжения и на выходах интеграторов выходных напряжений измерителей перемещений в качестве опорных напряжений и соответствующих выбранному значению угла прецессии и положению конуса прецессии относительно датчиков 12, 13 величины перемещения до момента времени начала шлифования (фиг.14, 15). Напомним, что для достижения высокой точности формообразования обработки шлифованием угол прецессии оси вращения вала 8 шпиндельного узла шлифовального станка и положение конуса прецессии относительно датчиков 12, 13 величины перемещения вала по осям и в процессе шлифования на вал 9, как отмечалось ранее, начинает воздействовать переменная по величине и направлению внешняя возмущающая нагрузка (фиг.5). В результате взаимодействия и (фиг.6) угол прецессии оси вращения вала остается неизменным, но происходит смещение конуса прецессии оси вращения вала 8 в направлении силы В результате уменьшаются максимальные и минимальные значения величины взоров под датчиками 12 и 13 перемещений вала 8 по осям и и эпюры переменных составляющих величин Поэтому и сместятся вниз (фиг.11,б, фиг.12,г), сместятся максимумы и минимумы переменных составляющих (фиг.13,б, и показано формы и уменьшатся амплитуды выходных сигналов измерителей изменятся и величины воздействием На фиг.1 представлена структурная схема шпиндельного узла шлифовального станка; на фиг.2 - эквивалентная схема шпиндельного узла шлифовального станка; на фиг.3 - прецессия оси вращения разбалансированного вала; на фиг.4 иллюстрация внешних сил и моментов, воздействующих на вал в процессе шлифования; на фиг.5 - иллюстрация изменения по величине и направлению результирующей внешней силы в процессе шлифования; на фиг.6 - смещение конуса прецессии оси вращения вала под воздействием результирующего внешнего возмущающего воздействия; на фиг.7 - эпюра изменения осевой составляющей силы шлифования при относительном смещении шлифовального круга и обрабатываемого изделия; на фиг.8 - общий вид заявляемой упругой опоры; на фиг.9 - сечения по А - А и Б - Б на фиг.8 с функциональной схемой блока управления; на фиг.10 - упругая опора с радиальной опорой качения, установленной на валу шпиндельного узла; на фиг.11 эпюры переменных составляющих выходного напряжения измерителя величины перемещения вала по оси возникающих из-за прецессии оси вращения вала; на фиг.12 - эпюры переменных составляющих выходного напряжения измерителя величины перемещения вала по оси возникающих из-за некруглости вала; на фиг.13 - эпюры выходных напряжений на выходе измерителя величины смещения вала по оси на фиг.14 - отклонение выходного напряжения интегратора выходного напряжения измерителя величины перемещения по оси от опорного напряжения положения конуса прецессии по оси при смещении вала под воздействием внешней нагрузки; на фиг.15 отклонение выходного напряжения интегратора выходного напряжения измерителя величины перемещения по оси от опорного напряжения положения конуса прецессии по оси при смещении вала под воздействием внешней нагрузки; на фиг.16 - вариант исполнения опоры с четырьмя упругими элементами с регулируемым давлением; на фиг.17 - вариант исполнения упругой опоры с четырьмя группами параллельно включенными упругими элементами с регулируемым давлением; на фиг.18 - вариант исполнения опоры, оснащенной регулируемыми упругими элементами с повышенным регулируемым давлением; на фиг.19 - вариант исполнения опоры в корпусе шпиндельного узла шлифовального станка. Предлагаемая упругая опора (фиг.8) включает втулку 1, в сечении по А - А которой (фиг.9) в радиальных направлениях и равномерно по окружности выполнены пазы 2. В пазах 2 размещены вкладыши 3, пружины 4 и регулировочные винты 5. Причем, паз 2 с размещенным в нем вкладышем 3, пружиной 4 и регулировочным винтом 5 образуют упругий элемент упругой опоры. С помощью регулировочных винтов 5, посредством пружины 4 устанавливают начальное давление вкладышей 3, например, на внешнюю обойму 6, радиальной опоры 7 качения, в которой вращается вал 8 шпиндельного узла (фиг.10), и установленную во втулке 1. Причем, вместо пружин 4 могут использоваться резинометаллические втулки (шарниры - а.с. СССР №1810642, опубл. 23.04.93, Бюл. №15; Упругая опора"). В двух пазах 2 упругой опоры, оси симметрии которых совпадают с полуосями и системы координат по которым направлены момент силы шлифования и гироскопический момент между пружинами 4 и регулировочными винтами 5, соответственно, установлены упорная шайба 9 и пьезостолбы 10. Пьезостолбы 10 предназначены для изменения давления вкладышей, например, внешней обоймы 6 радиальной опоры 7 качения за счет увеличения или уменьшения длин пьезостолбов 10 при подаче на них напряжений разной полярности. Причем паз 2 с размещенным в нем вкладышем 3, пружиной 4, упорной шайбой 9, пьезостолбом 10, регулировочным винтом 5 образует упругий элемент с регулируемой силой давления, 11 электроды пьезостолбов. В сечении упругой опоры по Б - Б по полуосям и системы координат оси которой параллельны осям системы установлены датчик 12 величины перемещения по оси и датчик 13 величины перемещения по оси соответственно (фиг.9). Датчики 12 и 13 величины перемещения предназначены для формирования, например, если в полости втулки 1 помещен вал 8 шпиндельного узла, сигналов, пропорциональных величинам смещения вала 8 по осям и или, иначе, сигналов, характеризующих положение конуса прецессии оси вращения вала 8 относительно датчиков 12 и 13 величины перемещения. Каждый датчик 12 и 13 величины перемещения через блок 14 управления (фиг.9) электрически связан с пьезостолбом 10 соответствующего упругого элемента с регулируемой силой давления. Блок 14 управления предназначен для формирования по сигналам датчиков 12 и 13 величины перемещения сигналов управления на соответствующие упругие элементы с регулируемой силой давления и предотвращения смещения конуса прецессии оси вращения вала 8 относительно заданного положения. В состав блока 14 управления входят следующие элементы. Измеритель 15 величины перемещения по оси и измеритель 16 величины перемещения по оси предназначенные для преобразования сигналов датчиков 12 и 13 величины перемещения по осям и в напряжения, пропорциональные положению вала 8 относительно этих датчиков 12 и 13. В качестве измерителей 15 и 16 могут использоваться измерители перемещений, приведенные в книге Гринкевича Б.Ф. (Измерительные компенсационно-мостовые устройства. - К.: Наук. думка, 1987). Измерители 15 и 16 величины перемещения по осям и соединены с интегратором 17 выходного напряжения измерителя перемещения по оси и с интегратором 18 выходного напряжения измерителя перемещений по оси соответственно. Интеграторы 17 и 18 служат для выделения постоянных составляющих и выходных напряжений измерителей 15 и 16 перемещений по осям и соответствующих несмещенному положению конуса прецессии оси вращения, если сила которые принимаются шлифования в качестве и опорных напряжений и а также для непрерывного формирования в процессе работы напряжений и соответствующих текущему положению конуса прецессии оси вращения. Интеграторы 17 и 18 могут быть построены по схемам, приведенным в книге Чеснокова А.А. (Решающие усилители. - Л.: Энергия, 1969). Переключатель 19 "опорное - работа" служит для коммутации выходных напряжений интеграторов 17 и 18. В положении переключателя 19 "опорное" выходы интеграторов 17 и 18 подключены ко входу аналого-цифрового преобразователя 20 напряжения и ко входу аналого-цифрового преобразователя 21 напряжения Аналого-цифровые преобразователи 20 и 21 (АЦП 20 и 21) предназначены для преобразования выходных напряжений интеграторов 17 и 18, принимаемых в качестве опорных, в цифровые двоичные коды. В качестве АЦП 20 и 21 могут быть использованы, например, АЦП на базе микросхемы К572ПВ1 (Гутников B.C. Интегральная электроника в измерительных устройствах. Л.: Энергоатомиздат, 1988. - С.239). Кнопка 22 "Старт" служит для запуска АЦП 20 и 21 путем подключения к ним в качестве сигнала запуска источника 23 постоянного напряжения. Схема 24 клапанов и схема 25 клапанов предназначена для записи по сигналам готовности АЦП 20 и АЦП 21 двоичных кодов напряжений и с выходов АЦП 20 и АЦП 21 в регистр 26 хранения кода опорного напряжения и в регистр 27 хранения кода опорного напряжения Цифроаналоговый преобразователь 28 и цифроаналоговый преобразователь 29 (ЦАП 28 и ЦАП 29) предназначены для преобразования двоичных кодов опорных напряжений и хранящихся в регистре 26 хранения кода опорного напряжения и в регистре 27 хранения кода опорного напряжения соответственно, в соответствующих этим кодам напряжения. В качестве ЦАП 28 и ЦАП 29 могут использоваться ЦАП, выполненные, например, на базе микросхемы К594ПА1 (Гутников B.C. Интегральная микроэлектроника в измерительных устройствах. - Л.: Энергоатомиздат, 1988. - С.230). Дифференциальный усилитель 30 сигнала погрешности положения конуса прецессии оси вращения вала и дифференциальный усилитель 31 погрешности положения конуса прецессии оси вращения предназначены для формирования сигналов управления на упругие элементы с регулируемым давлением, выполненные по полуосям и системы координат соответственно, пропорциональное величине смещения конуса прецессии оси вращения по осям и системы координат относительно его несмещенного (заданного) положения, обеспечивающих возврат этого конуса прецессии в несмещенное (заданное) положение. Причем, датчик 12 величины перемещения по оси соединен со входом измерителя 15 величины перемещения по оси датчик 13 величины перемещения по оси соединен с входом измерителя 16 величины перемещения по оси выход измерителя 15 величины перемещения по оси соединен со входом интегратора 17 выходного напряжения измерителя перемещения по оси выход измерителя 16 величины перемещения по оси соединен со входом интегратора 18 выходного напряжения измерителя по оси выход интегратора 17 выходного напряжения измерителя перемещения по оси через переключатель "опорное - работа" в положении "опорное" соединен синформационным входом аналого-цифрового преобразователя 20 напряжения а в положении "работа" соединен со вторым входом дифференциального усилителя 30 сигнала погрешности положения конуса прецессии оси вращения по оси выход интегратора 18 выходного напряжения измерителя величины перемещения по оси через переключатель "опорное - работа" в положении "опорное" соединен с информационным входом аналого-цифрового преобразователя 21 напряжения а в положении "работа" соединен со вторым входом дифференциального усилителя 31 сигнала погрешности положения конуса прецессии оси вращения по оси источник 23 постоянного напряжения через кнопку 22 "Старт" соединен с сигнальным входом аналого-цифрового преобразователя 20 напряжения и с сигнальным входом аналого-цифрового преобразователя 21 напряжения информационный выход аналого-цифрового преобразователя 20 напряжения соединен с информационным входом первой схемы 24 клапанов, а его сигнальный выход соединен с сигнальным входом первой схемы 24 клапанов, информационный выход аналого-цифрового преобразователя 21 напряжения соединен с информационным входом второй схемы 25 клапанов а его сигнальный выход соединен с сигнальным входом второй схемы 25 клапанов, выход первой схемы 24 клапанов соединен со входом регистра 26 хранения кода опорного напряжения выход регистра 26 хранения кода опорного напряжения соединен со входом цифро-аналогового преобразователя 28, а его выход соединен с первым входом дифференциального усилителя 30 сигнала погрешности положения конуса прецессии оси вращения по оси выход регистра 27 хранения кода опорного напряжения соединен со входом цифро-аналогового преобразователя 29, а его выход соединен с первым входом дифференциального усилителя 31 сигнала погрешности положения конуса прецессии оси вращения по оси выходы дифференциального усилителя 30 сигнала погрешности положения конуса прецессии оси вращения по оси соединены с пьезостолбом 10 упругого элемента с регулируемой силой давления, установленного по полуоси системы координат а выходы дифференциального усилителя 31 сигнала погрешности положения конуса прецессии оси вращения полуоси соединены с пьезостолбом 10 упругого элемента с регулируемой силой давления, установленного по полуоси системы координат Работу предлагаемой упругой опоры рассмотрим на примере ее применения в качестве упругой радиальной опоры шпиндельного узла шлифовального станка. Работает опора следующим образом. Задают валу 8 шпиндельного узла вращение с номинальной скоростью. Переключатель "опорное - работа" 19 устанавливают в положение "опорное" и включают блок 14 управления. Вал 8 шпиндельной опоры под воздействием динамической нагрузки, приложенной к центру масс вала 8, прецессирует с углом прецессии при вершине конуса прецессии. Величина угла прецессии определяется величиной разбалансированности вала 8 и жесткостью предлагаемой опоры. Величины зазоров под датчиками 12 и 13 величин перемещения по осям и измерителями 15 и 16 величины перемещения по осям и соответственно, непрерывно преобразуется в напряжения, пропорциональные текущим значениям величин зазоров под датчиками 12 и 13 и поступают на входы интеграторов 17 и 18 выходных напряжений измерителей перемещений по осям и системы координат После выхода вала 8 на номинальную скорость вращения напряжения, снимаемые с нагрузок интеграторов 17 и 18, равны постоянным составляющим напряжений и на выходах измерителей 15 и 16 величин перемещений и соответствуют несмещенному положению конуса прецессии оси вращения вала 8 (при номинальной скорости его вращения и отсутствии внешней нагрузки на вал 8). Напряжения и с выходов интеграторов 17 и 18 поступают в качестве опорных напряжений и информационные входы поступают на аналого-цифровых преобразователей 20 и 21 напряжений и соответственно. Нажимают кнопку 22 "Старт". Напряжение источника 23 постоянного напряжения через кнопку 22 "Старт" в качестве сигнала запуска поступает на сигнальные входы аналого-цифровых преобразователей 20 и 21. На выходах аналогоцифровых преобразователей 20 и 21 формируются двоичные коды опорных напряжений и соответствующие невозмущенному (выбранному) положению конуса прецессии оси вращения вала относительно датчиков 12 и 13 величины перемещения по осям и соответственно. В момент времени окончания преобразования напряжений и на сигнальных выходах аналого-цифровых преобразователей 20 и 21 появляются сигналы готовности. Сигнал готовности с выхода аналого-цифрового преобразователя 20 поступает на сигнальный вход схемы 24 клапанов, в результате двоичный код напряжения с выхода аналого-цифрового преобразователя 20 через схему 24 клапанов получает в регистр 26 хранения кода опорного напряжения Сигнал готовности с выхода аналого-цифрового преобразователя 21 поступает на сигнальный вход схемы 25 клапанов. В результате двоичный код напряжения с выхода аналого-цифрового преобразователя 21 через схему 25 клапанов получает в регистр 27 хранения кода опорного напряжения С выходов регистров 26 и 27 двоичные коды напряжений и поступают на входы цифроаналоговых преобразователей 28 и 29 соответственно. С выходов цифро-аналоговых преобразователей 28 и 29 постоянные напряжения, соответствующие выбранному положению конуса прецессии оси вращения вала 8 относительно датчиков 12 и 13 величин перемещения по осям и поступают на первые входы дифференциальных усилителей 30 и 31 сигналов погрешности положения конуса прецессии оси вращения по осям и соответственно. Переключатель 19 "опорное - работа" устанавливают в положение "работа" и подключают выходы интеграторов 17 и 18 выходных напряжений измерителей перемещений по осям и к вторым входам дифференциальных усилителей 30 и 31 соответственно. До начала шлифования при отсутствии нагрузки на вал 8 величины опорных напряжений и на первых входах дифференциальных усилителей 30 и 31, равны напряжениям и на их вторых входах, поступающих на вторые входы с интеграторов 17 и 18 выходных напряжений измерителей перемещений по осям и Следовательно, разность потенциалов между выходами каждого дифференциального усилителя 30 и 31, прикладываемая к пьезостолбам 10 упругих элементов с регулируемой силой давления, равна нулю. Поэтому давления вкладышей 3 упругих элементов на внешнюю обойму 6 радиальной опоры 7 качения не изменяется. В момент времени начала шлифования конус прецессии оси вращения, а следовательно и вал 8 шпиндельного узла, начинают смещаться в направлении результирующей внешней нагрузки на вал 8 Поэтому максимальные и минимальные величины зазоров под датчиками 12 и 13 величин перемещений по осям и (см. причинно-следственную связь) будут уменьшаться, что в свою очередь вызывает уменьшение напряжений и на выходах интеграторов 17 и 18, поступающих не вторые входы дифференциальных усилителей 30 и 31. Между выходами дифференциальных усилителей 30 и 31, возникает разность потенциалов. Полярность подключения пьезостолбов 10 упругих элементов с регулируемой силой давления к выходам дифференциальных усилителей 30 и 31 такая, что если и пьезостолбы 10 удлиняются. Давление вкладышей 3 на внешнюю обойму 6 опоры качения 7 в упругих опорах повышается и компенсирует возмущающую положение вала результирующую нагрузку на вал 8 что предотвращает смещение конуса прецессии оси вращения вала относительно датчиков 12 и 13 величин перемещения вала по осям и Погрешность формообразования при обработке шлифованием перестает зависеть от скорости подачи заготовки, толщины снимаемого припуска, относительного положения шлифовального круга и обрабатываемого изделия, твердости и однородности обрабатываемого изделия. Как известно, увеличение или уменьшение длины пьезостолбов 10 зависит от их размеров и величины управляющего напряжения и, как правило, достигает 500мкм. Поэтому, если приращение давления упругих элементов на внешнюю обойму 6 опоры качения 7 недостаточно для компенсации упругие элементы с регулируемой подъемной силой должны устанавливаться на каждой полуоси системы координат (фиг.16). Причем, пьезоэлементы 10 упругих элементов, установленных по одноименным полуосям, подключаются к дифференциальным усилителям 30 и 31 в противофазе так, чтобы например, при удлинении пьезоэлемента 10 упругого элемента, установленного по полуоси пьезоэлемент 10 упругого элемента, установленного по полуоси укорачивался. В этом случае давление на внешнюю обойму 6 будет составлять где - приращение давления одного упругого элемента с регулируемым давлением при подаче на него максимального управляющего напряжения Следовательно, компенсирующая способность такой опоры по каждой полуоси системы координат повышается в два раза. Если установка четырех упругих элементов с регулируемой подъемной силой не обеспечивает компенсацию симметрично осям системы координат (фиг.18) могут устанавливаться группы параллельно подключенных упругих элементов с регулируемым давлением, включающие упругих элементов. При этом группы параллельно подключенных упругих элементов, установленных симметрично одноименных полуосей (фиг.18) подключаются к соответствующим дифференциальным усилителям 30 и 31, как в предыдущих случаях, в противофазе. На фиг.18 каждая группа параллельно подключенных упругих элементов включает упругих элемента. Причем средний упругий элемент группы установлен по одной из полуосей системы координат а два других смещены относительно среднего на угол (фиг.18). Приращение давления на обойму 6 одной группы упругих элементов при таком варианте их расположения составляет Следовательно, компенсирующая способность опоры по каждой оси системы координат повышается в раза. В том случае, если приведенные выше варианты конструкции опоры не обеспечивают компенсацию опору снабжают корпусом 36, охватывающим втулку 1, в отверстиях которого установлены цилиндрические втулки 37, с размещенными в них толкателями 38, поджатыми с помощью регулировочных винтов 5 и пьезостолбов 10 (для уменьшения нагрузки на пьезостолбы 10 их может быть по 2 на каждый упругий элемент) к коромыслам 33, одни концы которых закреплены с возможностью поворота вокруг осей 34 на стойках 35, укрепленных во втулке 1 опоры, а другие взаимодействуют с направляющими шайбами 32, размещенными в радиальных пазах 2 втулки 1 и упруго поджатыми к упомянутым вкладышам 3 упругих элементов, а датчики 12 и 13 величины перемещения по осям и системы координат через блок управления электрически соединены с пьезостолбами 10, расположенными по одноименным осям системы координат На чертежах также обозначены: 39 - упругая радиальная опора; 40 - упругая осевая опора; 41 шарнир; 42 - шлифовальный инструмент; 43 обрабатываемое изделие.
ДивитисяДодаткова інформація
Назва патенту англійськоюElastic support
Автори англійськоюShepelev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych, Tsylina Vladyslav Volodymyrovych
Назва патенту російськоюУпругая опора
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич, Цилина Владислав Владимирович
МПК / Мітки
МПК: F16C 27/00
Код посилання
<a href="https://ua.patents.su/15-17151-pruzhna-opora.html" target="_blank" rel="follow" title="База патентів України">Пружна опора</a>
Пружна опора
Номер патенту: 1718
Опубліковано: 25.10.1994
Автор: Рахманов Микола Миколайович
МПК: F16F 7/00
Формула / Реферат:
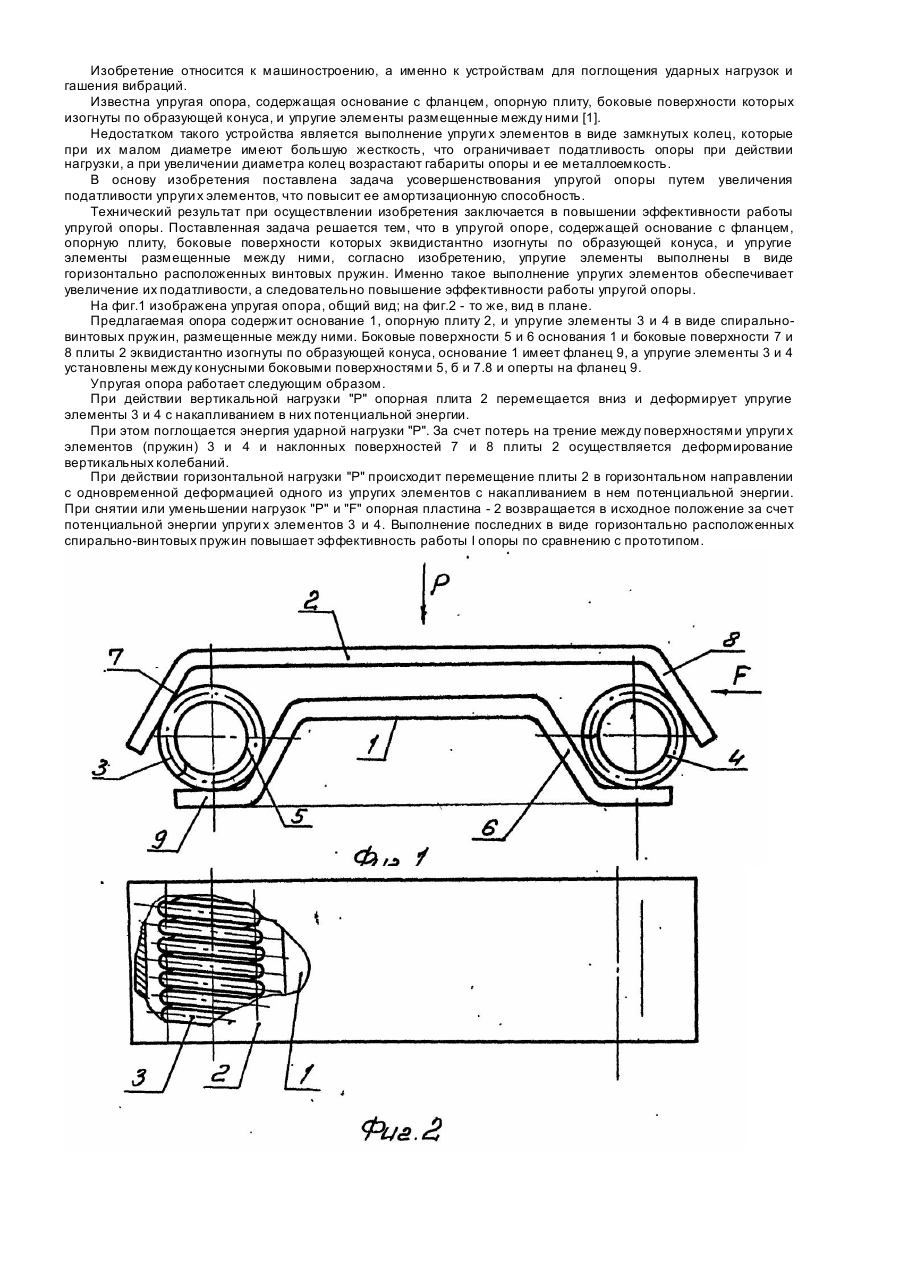
Упругая опора, содержащая основание с фланцем, опорную плиту, боковые поверхности которых эквидистантно изогнуты по образующей конуса, и упругие элементы, размещенные между ними, отличающаяся тем, что упругие элементы выполнены в виде горизонтально расположенных винтовых пружин.
Пружна опора
Номер патенту: 17113
Опубліковано: 18.03.1997
Автор: Рахманов Микола Миколайович
МПК: F16F 7/00
Формула / Реферат:
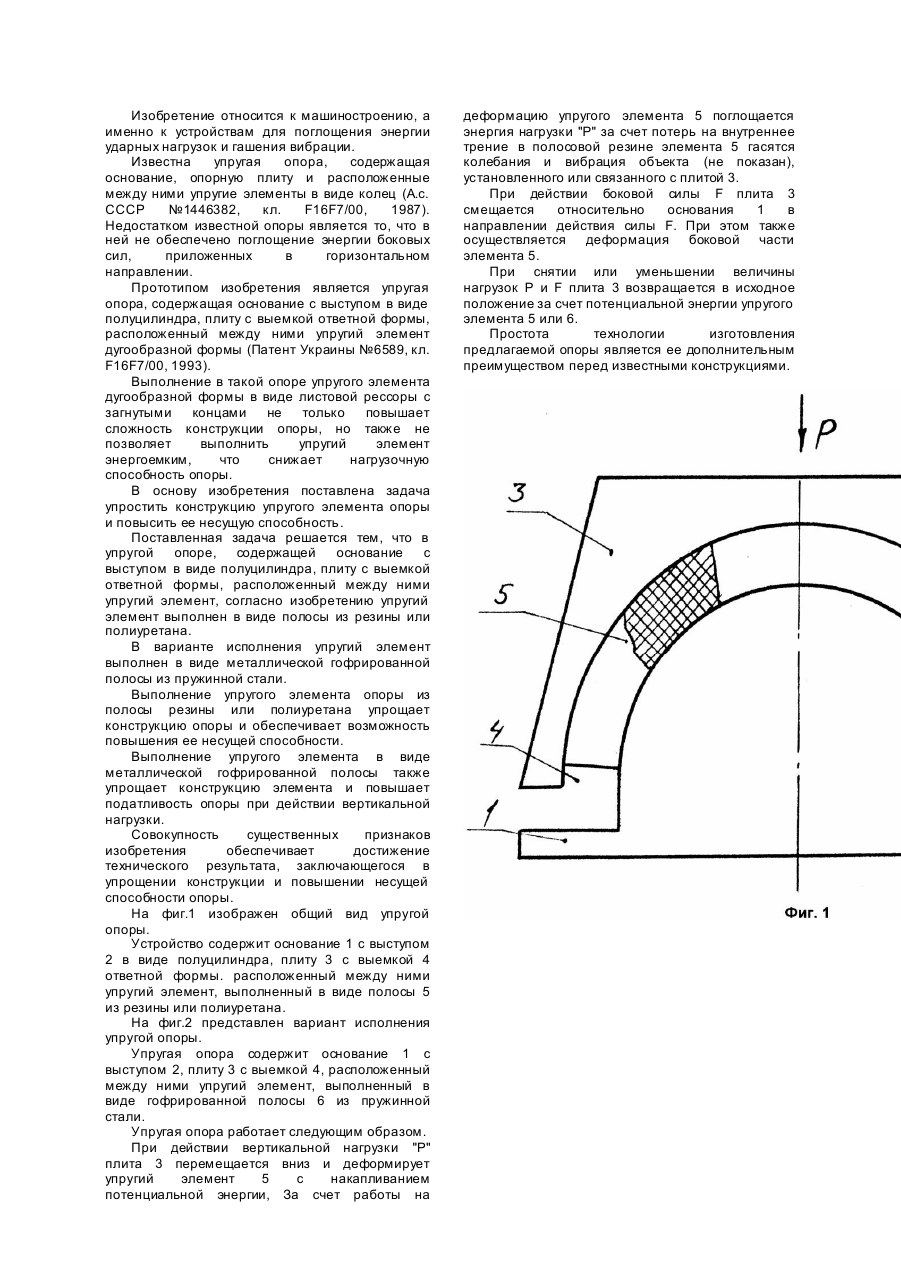
1. Упругая опора, содержащая основание с выступом в виде полуцилиндра, плиту с выемкой ответной формы, расположенный между ними упругий элемент дугообразной формы, отличающаяся тем, что упругий элемент выполнен в виде полосы из резины или полиуретана.2. Упругая опора по п.1, отличающаяся тем, что упругий элемент выполнен в виде гофрированной полосы из пружинной стали.
Пружна опора

Номер патенту: 6589
Опубліковано: 29.12.1994
Автор: Рахманов Микола Миколайович
МПК: F16F 7/00
Формула / Реферат:
Упругая опора, содержащая основание, опорную плиту и расположенный между ними упругий элемент в виде листовой рессоры с загнутыми концами, отличающаяся тем, что основание имеет выступ в виде полуцилиндра, плита имеет выемку ответной формы, а упругий элемент выполнен дугообразной, формы.
Пружна опора
Номер патенту: 10140
Опубліковано: 30.09.1996
Автор: Рахманов Микола Миколайович
МПК: F16F 7/00
Формула / Реферат:
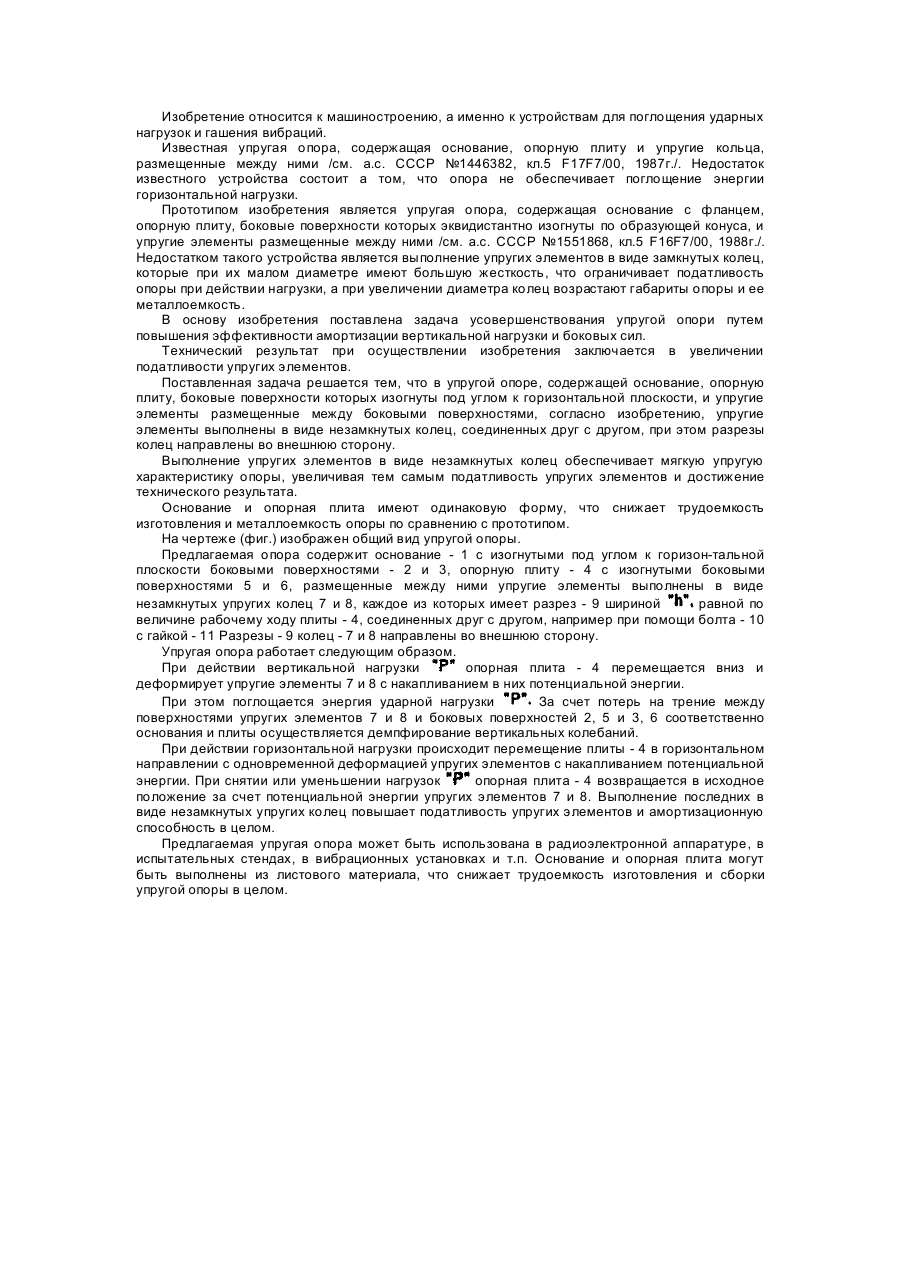
Упругая опора, содержащая основание, опорную плиту, боковые поверхности которых изогнуты под углом к горизонтальной плоскости и упругие элементы, размещенные между боковыми поверхностями, отличающаяся тем, что упругие элементы выполнены в виде незамкнутых колец, соединенных друг с другом, при этом разрезы колец направлены во внешнюю сторону.
Пружна опора – п
Номер патенту: 1958
Опубліковано: 20.12.1994
Автор: Рахманов Микола Миколайович
МПК: F16F 7/00
Формула / Реферат:
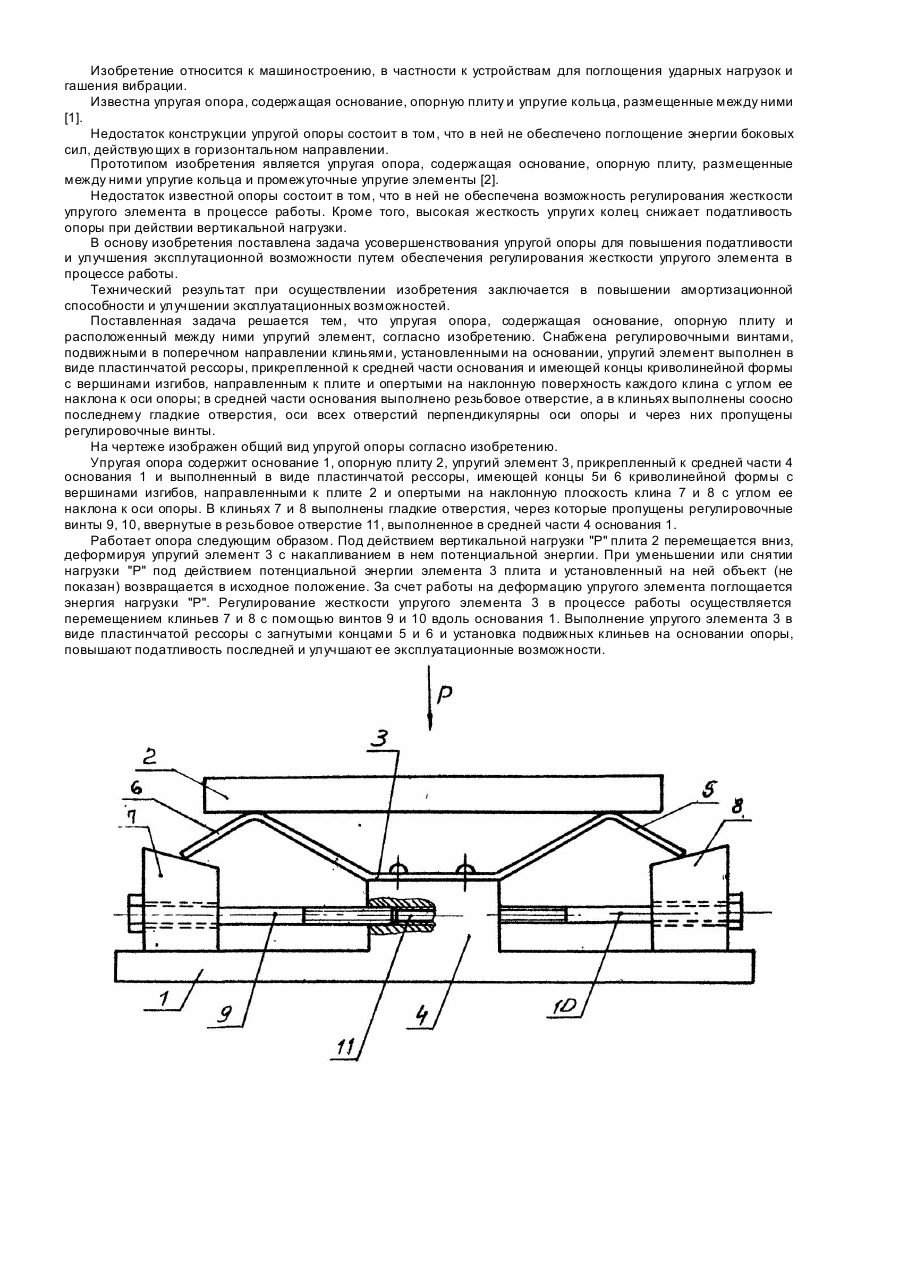
Упругая опора, содержащая основание, опорную плиту и расположенный между ними упругий элемент, отличающаяся тем, что она снабжена регулировочными винтами, подвижными в поперечном направлении клиньями, установленными на основании, упругий элемент выполнен в виде пластинчатой рессоры, прикрепленной к средней части основания и имеющей концы криволинейной формы с вершинами изгибов, направленными к плите и опертыми на наклонную поверхность каждого...