Канальна структура системи зв’язку і передавач та приймач для такої системи
Номер патенту: 55477
Опубліковано: 15.04.2003
Автори: Резайіфар Рамін, Джоу Ю-Чен, Тідеманн Едвард Г., мол.
Формула / Реферат
1. Канальна структура для систем зв'язку, яка включає:
- щонайменше один головний канал для передачі інформаційних даних, голосових даних і службових повідомлень,
- допоміжний канал для передачі інформаційних даних і
- пейджерний канал для передачі пейджерних повідомлень.
2. Канальна структура за п. 1, яка відрізняється тим, що для головного каналу передбачено можливість м'якої передачі зв'язку.
3. Канальна структура за п. 1, яка відрізняється тим, що головний канал призначається для усього сеансу зв'язку.
4. Канальна структура за п. 3, яка відрізняється тим, що віддалена станція вивільняє головний канал, якщо період відсутності активності зазначеної віддаленої станції перевищує перший зумовлений поріг.
5. Канальна структура за п. 4, яка відрізняється тим, що стан зазначеного сеансу зв’язку зберігається, якщо зазначений період відсутності активності зазначеної віддаленої станції перевищує зазначений перший зумовлений поріг.
6. Канальна структура за п. 5, яка відрізняється тим, що стан зазначеного сеансу зв'язку не зберігається, якщо зазначений період відсутності активності зазначеної віддаленої станції перевищує другий зумовлений поріг.
7. Канальна структура за п. 1, яка відрізняється тим, що зазначений допоміжний канал призначається віддаленій станції для передачі даних з підвищеною швидкістю.
8. Канальна структура за п. 1, яка відрізняється тим, що у зазначеному допоміжному каналі можна передавати дані з однією швидкістю з набору швидкостей передачі.
9. Канальна структура за п. 1, яка відрізняється тим, що для допоміжного каналу не передбачено можливості м'якої передачі зв'язку.
10. Канальна структура за п. 1, яка відрізняється тим, що зазначений допоміжний канал передається від найкращої базової станції активної групи віддаленої станції.
11. Канальна структура за п. 1, яка відрізняється тим, що швидкість передачі зазначеного допоміжного каналу є постійною протягом передачі.
12. Канальна структура за п. 11, яка відрізняється тим, що зазначена постійна швидкість передачі призначається згідно з кількістю даних, призначених для передачі.
13. Канальна структура за п. 11, яка відрізняється тим, що зазначена постійна швидкість передачі призначається згідно з запасом потужності передавача.
14. Канальна структура за п. 11, яка відрізняється тим, що зазначена постійна швидкість передачі призначається згідно з бажаним значенням енергії на біт для зазначеної передачі.
15. Канальна структура за п. 1, яка відрізняється тим, що зазначений головний канал і зазначений допоміжний канал можна передавати одночасно.
16. Канальна структура за п. 1, яка відрізняється тим, що додатково включає пілотний/керуючий канал для передачі пілотних і службових повідомлень.
17. Канальна структура за п. 16, яка відрізняється тим, що зазначені службові повідомлення передаються службовими кадрами, кожний з яких є частиною інформаційного канального кадру.
18. Канальна структура за п. 16, яка відрізняється тим, що зазначені службові повідомлення містять вимогу даних зворотного каналу.
19. Канальна структура за п. 18, яка відрізняється тим, що зазначена вимога даних зворотного каналу включає інформацію про кількість даних, що підлягають передачі.
20. Канальна структура за п. 18, яка відрізняється тим, що зазначена вимога даних зворотного каналу включає інформацію про запас потужності.
21. Канальна структура за п. 16, яка відрізняється тим, що зазначені службові повідомлення містять багатокоміркові ![]() рівні потужності, які вказують на рівні прийнятої потужності пілот-сигналів Активної групи віддаленої станції.
рівні потужності, які вказують на рівні прийнятої потужності пілот-сигналів Активної групи віддаленої станції.
22. Канальна структура за п. 16, яка відрізняється тим, що зазначені службові повідомлення містять багатоносійні рівні потужності, які вказують на рівні прийнятої потужності носіїв активної групи віддаленої станції.
23. Канальна структура за п. 16, яка відрізняється тим, що зазначені службові повідомлення містять біти-індикатори стирання, які вказують на стертий стан попередніх прийнятих кадрів даних.
24. Канальна структура за п. 21, яка відрізняється тим, що зазначений допоміжний канал передає базова станція, вибрана згідно з зазначеними багатокомірковими ![]() рівнями потужності.
рівнями потужності.
25. Канальна структура за п. 21, яка відрізняється тим, що зазначені багатокоміркові ![]() рівні потужності передаються у першому службовому кадрі інформаційного канального кадру.
рівні потужності передаються у першому службовому кадрі інформаційного канального кадру.
26. Канальна структура за п. 22, яка відрізняється тим, що зазначені багатоносійні рівні потужності передаються у другому службовому кадрі інформаційного канального кадру.
27. Канальна структура за п. 23, яка відрізняється тим, що зазначені біти-індикатори стирання передаються у третьому службовому кадрі інформаційного канального кадру.
28. Канальна структура за п. 18, яка відрізняється тим, що зазначена вимога даних зворотного каналу передається у четвертому службовому кадрі інформаційного канального кадру.
29. Канальна структура за п. 1, яка відрізняється тим, що додатково включає керуючий канал для передачі розкладів і службових повідомлень.
30. Канальна структура за п. 29, яка відрізняється тим, що зазначений розклад містить призначену швидкість передачі.
31. Канальна структура за п. 29, яка відрізняється тим, що зазначений розклад містить тривалість призначеної передачі.
32. Канальна структура за п. 29, яка відрізняється тим, що зазначені службові повідомлення включають біти-індикатори стирання попередніх прийнятих кадрів даних.
33. Канальна структура за п. 29, яка відрізняється тим, що зазначені службові повідомлення включають біти-індикатори, які вказують на наявність повідомлення на зазначеному головному каналі віддаленої станції.
34. Канальна структура за п. 1, яка відрізняється тим, що прийом зазначених пейджерних каналів здійснюється у безщілинному режимі віддаленою станцією, якщо період відсутності активності зазначеної віддаленої станції перевищує перший зумовлений поріг.
35. Канальна структура за п. 1, яка відрізняється тим, що прийом зазначених пейджерних каналів здійснюється у щілинному режимі віддаленою станцією, якщо період відсутності активності зазначеної віддаленої станції перевищує другий зумовлений поріг.
36. Канальна структура за п. 1, яка відрізняється тим, що додатково включає пілот-канал для передачі пілот-сигналів.
37. Канальна структура за п. 1, яка відрізняється тим, що додатково включає канал синхронізації для передачі синхросигналів.
38. Канальна структура за п. 1, яка відрізняється тим, що додатково включає канал доступу для передачі початкових повідомлень і відповідей на пейджерні повідомлення.
39. Передавальний пристрій для систем зв'язку, який включає передавач для:
- передачі щонайменше одного головного каналу інформаційних даних, голосових даних і службових повідомлень,
- передачі інформаційних даних у допоміжному каналі і
- передачі пейджерних повідомлень у пейджерному каналі.
40. Приймальний пристрій для систем зв'язку, який включає приймач для:
- прийому щонайменше одного головного каналу інформаційних даних, голосових даних і службових повідомлень,
- прийому інформаційних даних у допоміжному каналі і
- прийому пейджерних повідомлень у пейджерному каналі.
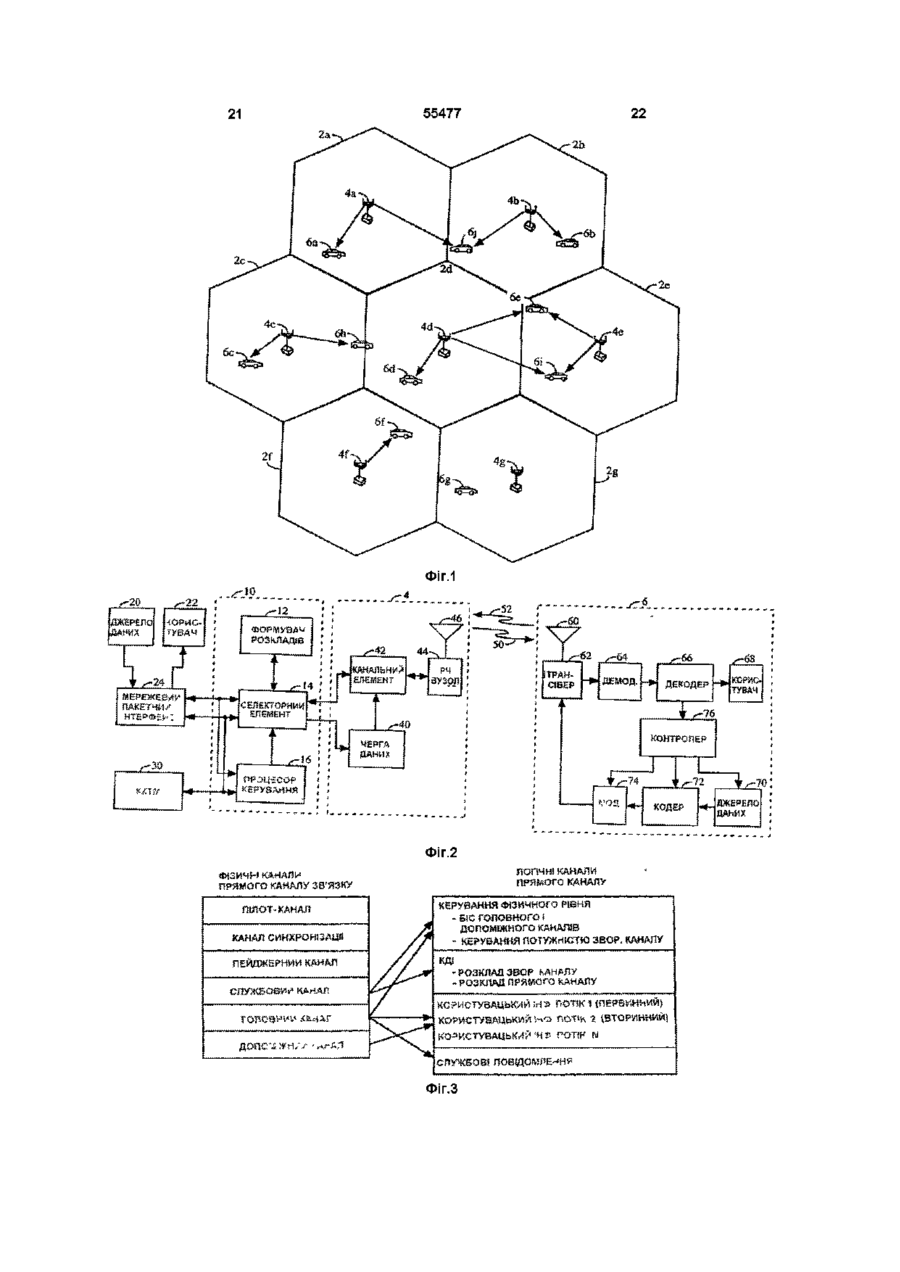
41. Система зв'язку, яка включає два набори фізичних каналів - один для прямого каналу зв'язку і другий для зворотного каналу зв'язку, які використано для здійснення зв'язку у різних логічних каналах.
Текст
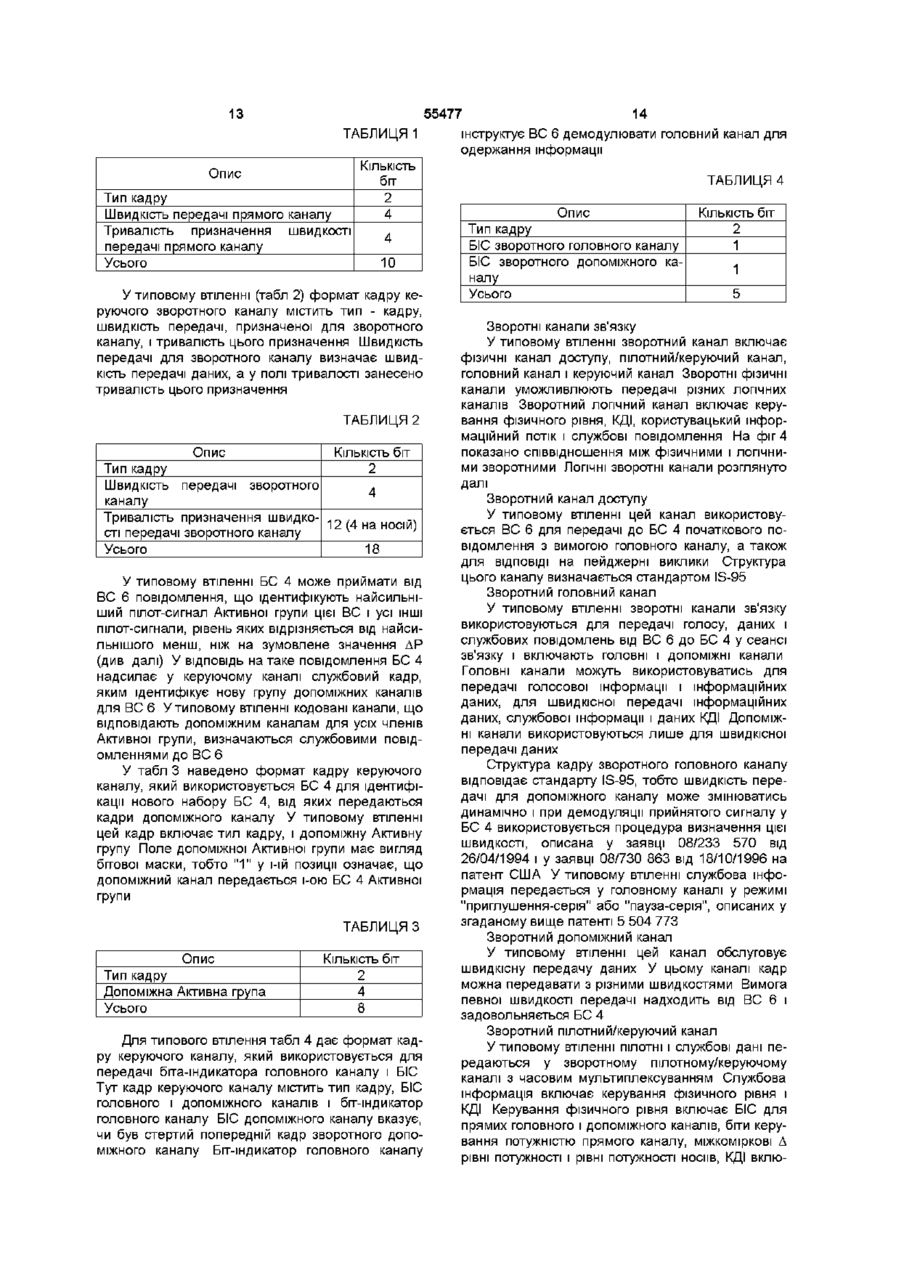
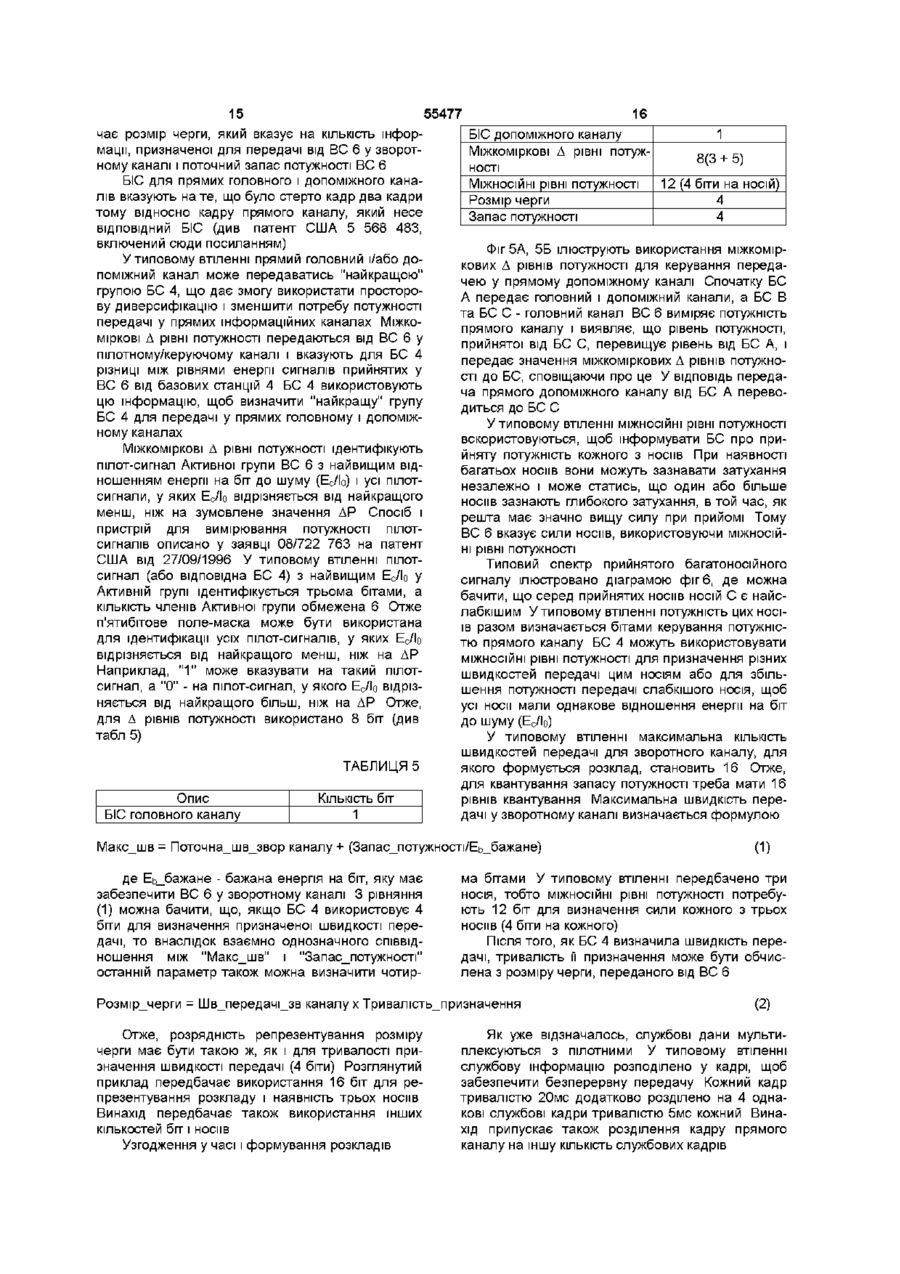
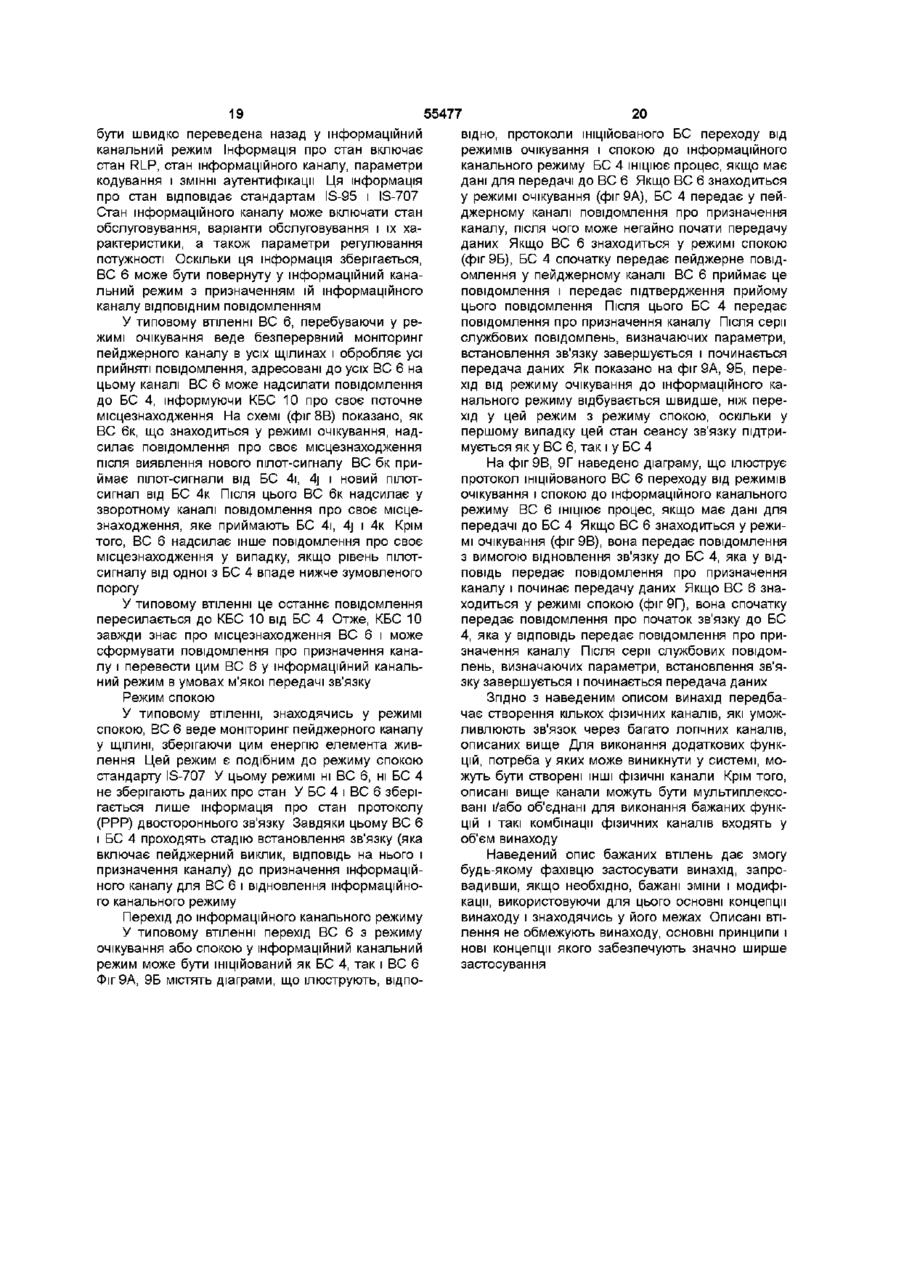
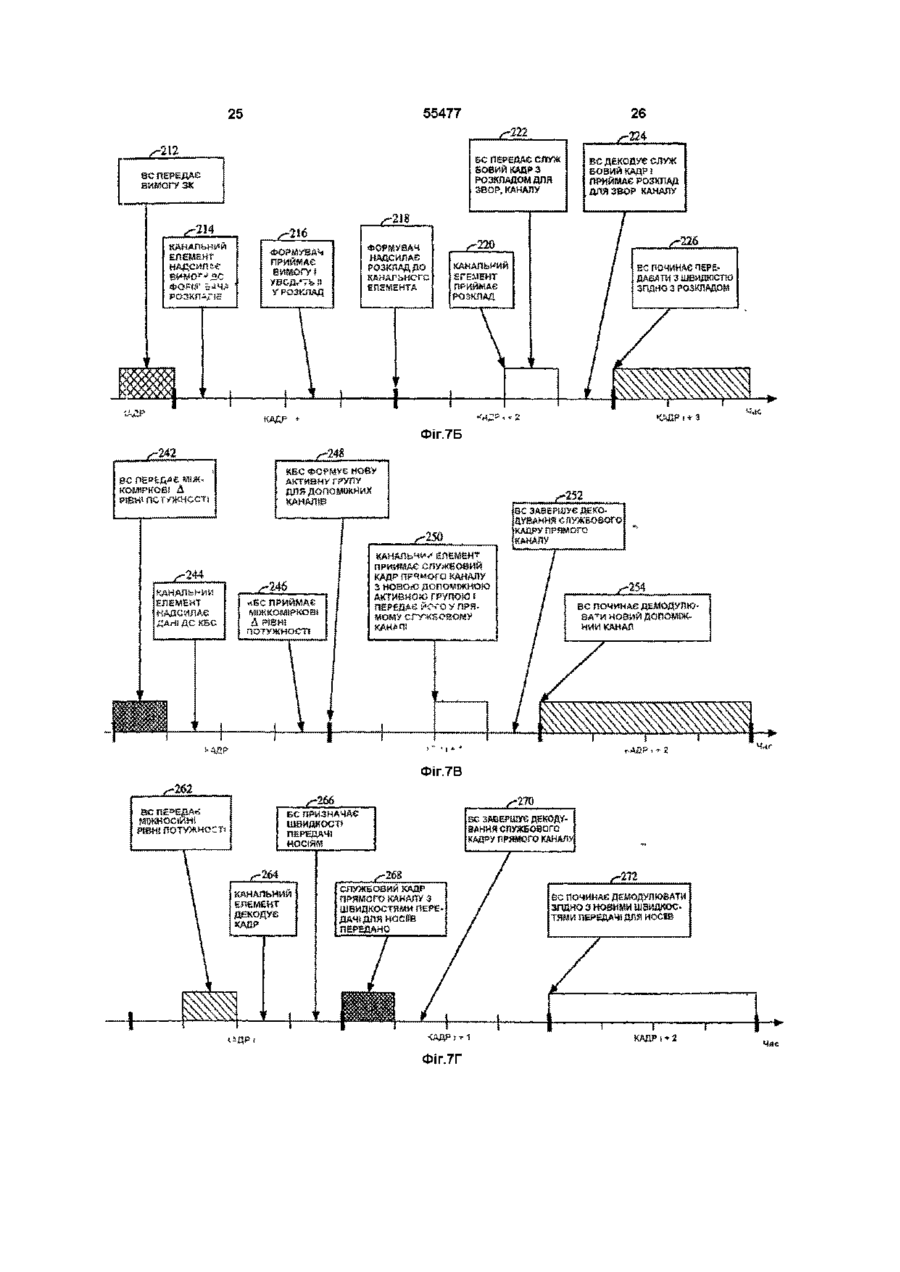
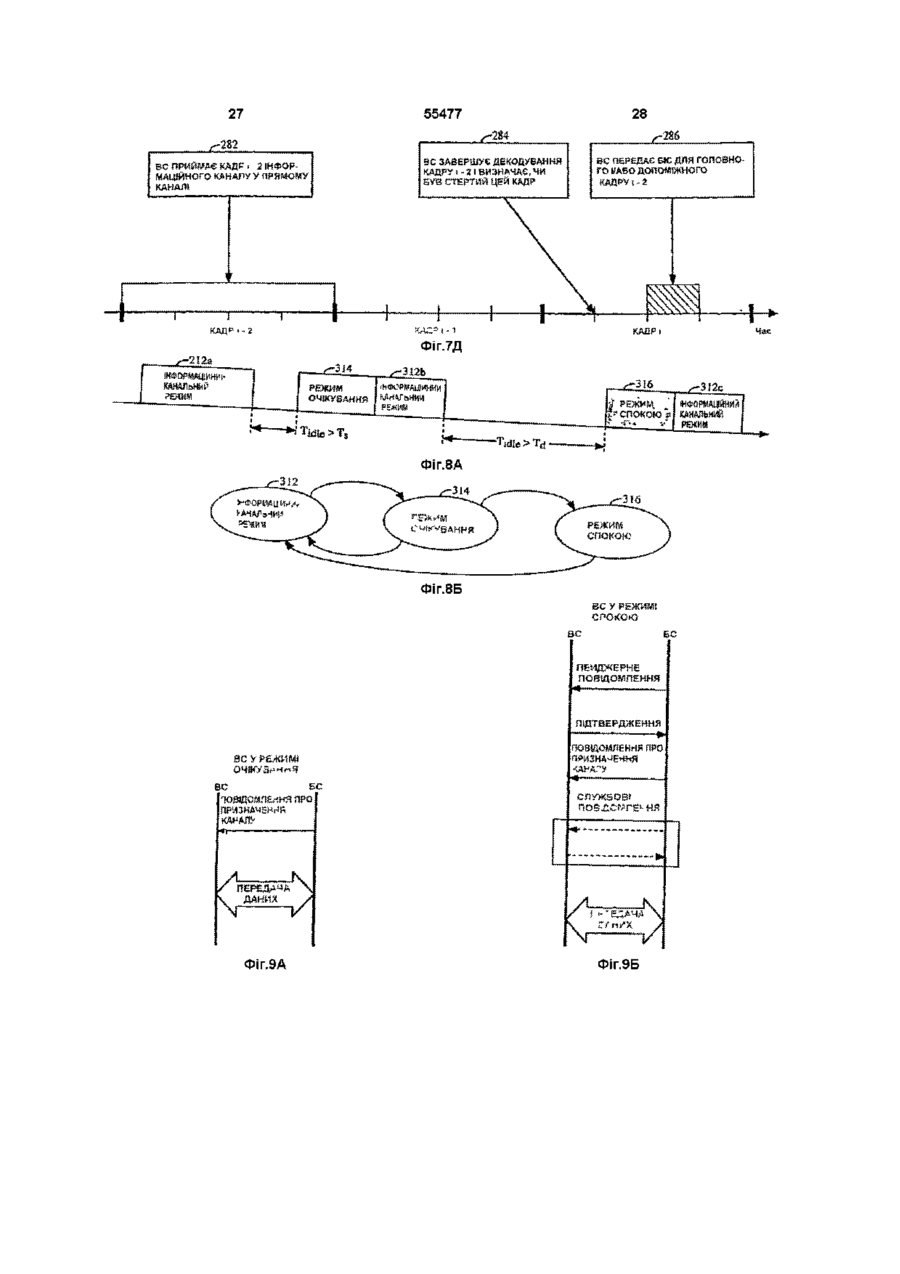
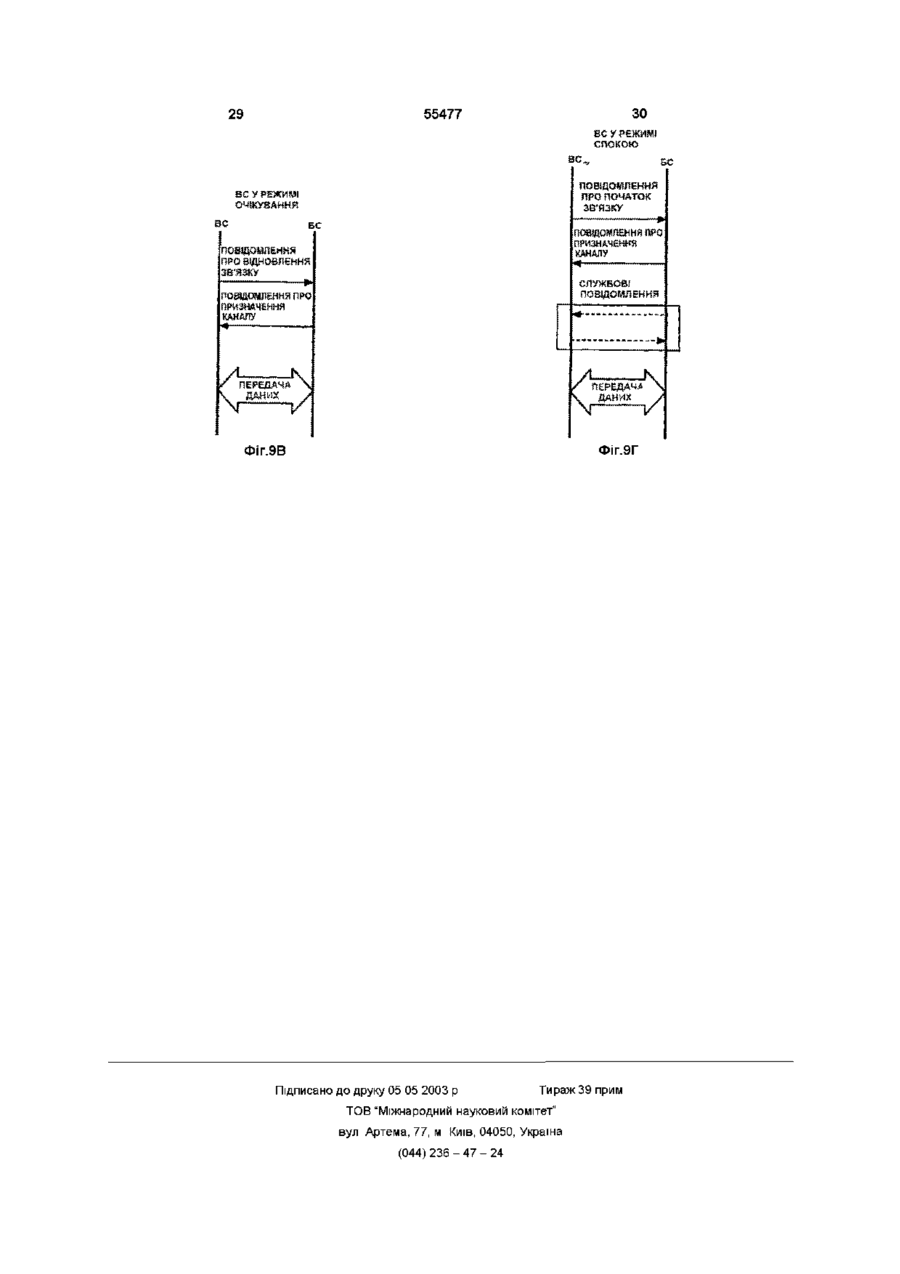
1 Канальна струїсгура для систем зв'язку, яка включає - щонайменше один головний канал для передачі інформаційних даних, голосових даних і службових повідомлень, - допоміжний канал для передачі інформаційних даних і - пейджерний канал для передачі пейджерних повідомлень 2 Канальна структура за п 1, яка відрізняється тим, що для головного каналу передбачено можливість м'якої передачі зв'язку 3 Канальна структура за п 1, яка відрізняється тим, що головний канал призначається для усього сеансу зв'язку 4 Канальна структура за п 3, яка відрізняється тим, що віддалена станція вивільняє головний канал, якщо період відсутності активності зазначеної віддаленої станції перевищує перший зумовлений поріг 5 Канальна структура за п 4, яка відрізняється тим, що стан зазначеного сеансу зв'язку зберігається, якщо зазначений період відсутності активності зазначеної віддаленої станції перевищує зазначений перший зумовлений поріг 6 Канальна структура за п 5, яка відрізняється тим, що стан зазначеного сеансу зв'язку не зберігається, якщо зазначений період відсутності активності зазначеної віддаленої станції перевищує другий зумовлений поріг 7 Канальна структура за п 1, яка відрізняється тим, що зазначений допоміжний канал призначається віддаленій станції для передачі даних з підвищеною швидкістю 8 Канальна структура за п 1, яка відрізняється тим, що у зазначеному допоміжному каналі можна передавати дані з однією швидкістю з набору швидкостей передачі 9 Канальна структура за п 1, яка відрізняється тим, що для допоміжного каналу не передбачено можливості м'якої передачі зв'язку 10 Канальна структура за п 1, яка відрізняється тим, що зазначений допоміжний канал передається від найкращої базової станції активної групи віддаленої станції 11 Канальна структура за п 1, яка відрізняється тим, що швидкість передачі зазначеного допоміжного каналу є постійною протягом передачі 12 Канальна структура за п 11, яка відрізняється тим, що зазначена постійна швидкість передачі призначається згідно з КІЛЬКІСТЮ даних, призначених для передачі 13 Канальна структура за п 11, яка відрізняється тим, що зазначена постійна швидкість передачі призначається згідно з запасом потужності передавача 14 Канальна структура за п 11, яка відрізняється тим, що зазначена постійна швидкість передачі призначається згідно з бажаним значенням енергії на біт для зазначеної передачі 15 Канальна структура за п 1, яка відрізняється тим, що зазначений головний канал і зазначений допоміжний канал можна передавати одночасно 16 Канальна структура за п 1, яка відрізняється тим, що додатково включає пілотний/керуючий канал для передачі пілотних і службових повідомлень 17 Канальна структура за п 16, яка відрізняється тим, що зазначені службові повідомлення передаються службовими кадрами, кожний з яких є частиною інформаційного канального кадру 18 Канальна структура за п 16, яка відрізняється тим, що зазначені службові повідомлення містять вимогу даних зворотного каналу 19 Канальна структура за п 18, яка відрізняється тим, що зазначена вимога даних зворотного каналу включає інформацію про КІЛЬКІСТЬ даних, що підлягають передачі 20 Канальна структура за п 18, яка відрізняється тим, що зазначена вимога даних зворотного каналу включає інформацію про запас потужності О ю ю 55477 21 Канальна струїсгура за п 16, яка відрізняється тим, що зазначені службові повідомлення містять багатокоміркові Д рівні потужності, які вказують на рівні прийнятої потужності пілот-сигналів Активної групи віддаленої станції 22 Канальна структура за п 16, яка відрізняється тим, що зазначені службові повідомлення містять багатоносійні рівні потужності, які вказують на рівні прийнятої потужності носив активної групи віддаленої станції 23 Канальна структура за п 16, яка відрізняється тим, що зазначені службові повідомлення містять біти-індикатори стирання, які вказують на стертий стан попередніх прийнятих кадрів даних 24 Канальна структура за п 21, яка відрізняється тим, що зазначений допоміжний канал передає базова станція, вибрана згідно з зазначеними багатокомірковими Д рівнями потужності 25 Канальна структура за п 21, яка відрізняється тим, що зазначені багатокоміркові Д рівні потужності передаються у першому службовому кадрі інформаційного канального кадру 26 Канальна структура за п 22, яка відрізняється тим, що зазначені багатоносійні рівні потужності передаються у другому службовому кадрі інформаційного канального кадру 27 Канальна структура за п 23, яка відрізняється тим, що зазначені біти-індикатори стирання передаються у третьому службовому кадрі інформаційного канального кадру 28 Канальна структура за п 18, яка відрізняється тим, що зазначена вимога даних зворотного каналу передається у четвертому службовому кадрі інформаційного канального кадру 29 Канальна структура за п 1, яка відрізняється тим, що додатково включає керуючий канал для передачі розкладів і службових повідомлень 30 Канальна структура за п 29, яка відрізняється тим, що зазначений розклад містить призначену швидкість передачі 31 Канальна структура за п 29, яка відрізняється тим, що зазначений розклад містить тривалість призначеної передачі 32 Канальна структура за п 29, яка відрізняється тим, що зазначені службові повідомлення включають біти-індикатори стирання попередніх прийнятих кадрів даних 33 Канальна структура за п 29, яка відрізняється тим, що зазначені службові повідомлення включа Винахід стосується структури каналу для систем зв'язку Модуляція з використанням паралельного доступу з кодовим ущільненням каналів (ПДКУ) є одним з способів, що уможливлюють встановлення зв'язку для великої КІЛЬКОСТІ користувачів системи Іншими відомими способами забезпечення паралельного доступу є паралельний доступ з розділом часу (ПДРЧ) та паралельний доступ з розділом частот (ПДРЧС) Модуляція з ПДКУ, од 4 ють біти-індикатори, які вказують на наявність повідомлення на зазначеному головному каналі віддаленої станції 34 Канальна структура за п 1, яка відрізняється тим, що прийом зазначених пейджерних каналів здійснюється у безщілинному режимі віддаленою станцією, якщо період відсутності активності зазначеної віддаленої станції перевищує перший зумовлений поріг 35 Канальна структура за п 1, яка відрізняється тим, що прийом зазначених пейджерних каналів здійснюється у щілинному режимі віддаленою станцією, якщо період відсутності активності зазначеної віддаленої станції перевищує другий зумовлений поріг 36 Канальна структура за п 1, яка відрізняється тим, що додатково включає пілот-канал для передачі пілот-сигналів 37 Канальна структура за п 1, яка відрізняється тим, що додатково включає канал синхронізації для передачі синхросигналів 38 Канальна структура за п 1, яка відрізняється тим, що додатково включає канал доступу для передачі початкових повідомлень і відповідей на пейджерні повідомлення 39 Передавальний пристрій для систем зв'язку, який включає передавач для - передачі щонайменше одного головного каналу інформаційних даних, голосових даних і службових повідомлень, - передачі інформаційних даних у допоміжному каналі і - передачі пейджерних повідомлень у пейджерному каналі 40 Приймальний пристрій для систем зв'язку, який включає приймач для - прийому щонайменше одного головного каналу інформаційних даних, голосових даних і службових повідомлень, - прийому інформаційних даних у допоміжному каналі і - прийому пейджерних повідомлень у пейджерному каналі 41 Система зв'язку, яка включає два набори фізичних каналів - один для прямого каналу зв'язку і другий для зворотного каналу зв'язку, які використано для здійснення зв'язку у різних логічних каналах нак, має суттєві переваги над іншими системами Використання ПДКУ у системах зв'язку з паралельним доступом описано у патентах США 4 901 307 та 5 103 459, включених сюди посиланням Спосіб реалізації ПДКУ стандартизовано Асоціацією зв'язку стандартом TIA/EIA/IS-95-A (далі просто IS-95) ПДКУ використано у системі зв'язку GLOBALSTAR, яка охоплює весь світ і використовує низькоорбітальні супутники Система зв'язку з ПДКУ забезпечує передачу 55477 інформаційних і голосових даних у прямому і зворотному каналах зв'язку Спосіб передачі інформаційних даних кадрами у кодованому каналі описано у патенті США 5 504 773, включеному сюди посиланням Згідно з стандартом IS-95 інформаційні і голосові дані розділяють на кадри інформаційного каналу тривалістю 20мс Бітова швидкість передачі даних у кожному інформаційному каналі є змінною і може досягати 14400біт/с У системах ПДКУ зв'язок між користувачами здійснюється через одну або більше базових станцій (далі - БС) Перший користувач на першій віддаленій станції (далі - ВС) встановлює зв'язок з другим користувачем на другій ВС, передаючи дані у зворотному каналі до БС БС приймає ці дані і може переслати їх до іншої БС Дані передаються у прямому каналі тієї ж БС або другої БС до другої ВС Прямим називають канал, яким передаються сигнали від БС до ВС, а зворотним канал, яким передаються сигнали від ВС до БС Згідно З IS-95 прямому і зворотному каналам призначають різні частоти Підчас сеансу зв'язку ВС підтримує зв'язок з щонайменше одною БС ВС з ПДКУ здатні мати зв'язок одночасно з кількома БС під час м'якої передачі зв'язку М'яка передача зв'язку є процесом встановлення зв'язку з новою БС перед припиненням зв'язку з попередньою БС М'яка передача зв'язку забезпечує мінімальну імовірність втрати зв'язку Спосіб і система для забезпечення зв'язку з ВС через кілька БС під час м'якої передачі зв'язку описано у патенті США 5 267 261, включеному сюди посиланням М'якшою передачею зв'язку називають процес підтримання зв'язку через кілька секторів одної БС її описано у заявці 08/763 498 на патент США від 11/12/1996, включеній сюди посиланням Поширення систем безпровідної передачі даних породжує потребу у ефективних безпровідних системах зв'язку Приклад такої системи можна знайти у заявці 08/654 443 на патент США від 28/05/1996, включеній сюди посиланням, де описано багатошвидкісний зв'язок з однією з набору швидкостей передачі Суттєвою різницею між передачею голосу і передачею даних є те, що перша потребує постійної спільної якості обслуговування Для цифрових систем передачі голосу це звичайно означає використання усіма користувачами однієї постійної швидкості передачі з максимально припустимою КІЛЬКІСТЮ помилок у мовних кадрах незалежно від ресурсів каналу Для тієї ж швидкості передачі користувачі з слабкими каналами потребують призначення більшої КІЛЬКОСТІ ресурсів, що призводить до неефективного їх використання На відміну від цього при передачі даних якість обслуговування може бути різною для різних користувачів і як параметр може бути оптимізована для збільшення загальної ефективності системи зв'язку У системах передачі даних якість обслуговування звичайно визначають як повну затримку при передачі повідомлення Іншою різницею між передачею голосу і передачею даних є те, що перша накладає суворі фіксовані вимоги до затримки Звичайно загальна припустима затримка передачі мовного кадру у один бік має бути менше ЮОмс На відміну від цього затримка даних є змінним параметром, який оптимізують для підвищення загального рівня ефективності системи Параметрами, що характеризують якість і ефективність системи передачі даних, є повна затримка при передачі пакету даних і середня швидкість передачі у системі Повна затримка не так сильно впливає на передачу даних, як на передачу голосу, але є важливою мірою якості системи Середня швидкість передачі характеризує ефективність роботи системи передачі даних Система зв'язку, призначена оптимізувати обслуговування передачі даних і передачі голосу, має брати до уваги вимоги обох типів зв'язку Винахід спрямовано на побудову такої структури каналів, яка забезпечує обслуговування передачі як даних, так і голосу Першою задачею винаходу є створення для системи зв'язку канальної структури, яка включає щонайменше один головний канал для передачі інформаційних даних, голосових даних і керуючих сигналів, допоміжний канал для передачі інформаційних даних і пейджерний канал для передачі пейджерних повідомлень Другою задачею винаходу є створення для системи зв'язку передавального пристроя, який має у складі передавач для передачі щонайменше одного головного каналу інформаційних даних, голосових даних і службових повідомлень, передачі інформаційних даних у допоміжному каналі і передачі пейджерних повідомлень у пейджерному каналі Третьою задачею винаходу є створення для системи зв'язку приймального пристроя, який має у складі приймач для прийому щонайменше одного головного каналу інформаційних даних, голосових даних і службових повідомлень, прийому інформаційних даних у допоміжному каналі і прийому пейджерних повідомлень у пейджерному каналі Винахід включає також канальну структуру для системи зв'язку, яка має дві групи фізичних каналів - для прямого і зворотного каналів зв'язку, які використовуються для побудови різних логічних каналів У втіленні винаходу можуть бути використані дві групи фізичних каналів і різні ЛОГІЧНІ канали ФІЗИЧНІ канали включають канали даних і керуючі канали У типовому втіленні канали даних включають головні канали, що використовуються для передачі голосової інформації, інформаційних даних, швидкісних даних і іншої додаткової інформації, і ДОПОМІЖНІ канали, які використовуються для швидкісної передачі даних У такому втіленні прямий і зворотний інформаційні канали можуть бути вивільнені, коли ВС не працюють, що дає змогу краще використовувати наявні ресурси Керуючі канали використовуються для передачі службових повідомлень і розкладової інформації Бажано, щоб інформаційні канали включали головні і ДОПОМІЖНІ канали Перші можуть бути використані для передачі голосової інформації, інформаційних даних, швидкісних даних і службових повідомлень ДОПОМІЖНІ канали можуть бути використані для швидкісної передачі даних У ти 55477 повому втіленні головний і допоміжний канали можна передавати одночасно, а для підвищення надійності (особливо для службових повідомлень) у головних каналах передбачено можливість м'якої передачі зв'язку У допоміжних каналах бажано вести передачу на одній швидкості з набору швидкостей передачі Цю швидкість обирають, базуючись на сукупності параметрів, яка може включати КІЛЬКІСТЬ інформації, що підлягає передачі, потужність передачі для ВС і бажану енергію на біт Швидкість передачі призначає формувач розкладів, максимізуючи загальну швидкість передач у системі Бажано періодично виміряти рівні потужності усіх БС Активної групи ВС під час сеансу зв'язку Значення Д рівнів потужності від багатьох комірок надходять до БС, які використовують цю інформацію, щоб швидкісно передавати дані від "найкращої" групи БС, збільшуючи цим ємкість системи Крім того, періодично виміряються рівні потужності усіх носіїв і Д рівні потужності носіїв передаються до БС БС можуть використати цю інформацію для підвищення потужності слабких носив або для перепризначення БС новим носіям ВС може працювати у одному з трьох робочих режимів, а саме, у інформаційному канальному режимі, режимі очікування і режимі спокою Якщо період відсутності активності з моменту закінчення останньої передачі перевищує зумовлений перший поріг, ВС переходить у режим очікування У типовому втіленні у цьому режимі інформаційний канал вивільняється, але інформація про стан зберігається як у ВС, так і у БС, і ВС веде моніторинг пейджерного каналу в усіх щілинах Отже, ВС може бути швидко переведена назад у інформаційний канальний режим Якщо період неактивності перевищує другий зумовлений поріг, ВС переходить у режим спокою Згідно З ТИПОВИМ втіленням у цьому режимі ВС і БС не зберігають інформацію про стан, але ВС веде моніторинг пейджерного каналу у режимі розділення часу Керуючі дані можуть бути передані службовими кадрами, які є частиною інформаційного канального кадру У типовому втіленні вимоги певної швидкості передачі і інша інформація передаються від ВС з використанням формату керуючого канального кадру, що мінімізує затримку обробки між моментом передачі вимоги швидкості передачі і фактичною передачею з цією швидкістю Крім того, винахід передбачає біти-індикатори стирання (БІС) у прямому і зворотному каналах, які можуть бути використані замість кадрів NACK RLP, передбачених стандартом IS-707 Інші особливості, задачі і переваги винаходу наведено у подальшому детальному описі з посиланням на супроводжуючі креслення, у яких фіг 1 - схема типової системи зв'язку згідно з винаходом, фіг 2 - блок-схема основних підсистем типової системи зв'язку згідно з винаходом, фіг 3 - схема типових співвідношень між фізичними і логічними каналами прямого каналу зв'язку, фіг 4 - схема типових співвідношень між фізичними і логічними каналами зворотного каналу зв'язку, 8 фіг5А, 5Б -типові схеми, що ілюструють використання міжкоміркових Д рівнів потужності для керування передачею прямого допоміжного каналу, фіг 6 - типовий спектр прийнятого багатоносійного сигналу, фіг 7А - типова схема формату пілотного/керуючого канального кадру зворотного каналу, фіг 7Б - типова часова діаграма швидкісної передачі даних у зворотному каналі, фіг7В - типова часова діаграма використання Д рівнів потужності, фіг 7Г - типова часова діаграма використання МІЖНОСІЙНИХ рівнів потужності, фіг 7Д - типова часова діаграма передачі БІС, фіг8А, 8Б - типова часова діаграма переводу до режиму очікування і режиму спокою і типова діаграма стану, яка ілюструє переходи між робочими режимами, ВІДПОВІДНО, фіг8В - типова часова діаграма, що ілюструє випадок, коли ВС, яка знаходиться у режимі очікування, надсилає повідомлення про нове місцезнаходження після виявлення нового пілот-сигналу, фіг 9А, 9Б - типова часова діаграма, що ілюструє протокол ініційованого БС переходу від режиму очікування і режиму спокою у інформаційний канальний режим, ВІДПОВІДНО, фіг 9В, 9Г - типова часова діаграма, що ілюструє протокол ініційованого ВС переходу від режиму очікування і режиму спокою у інформаційний канальний режим, ВІДПОВІДНО На фіг 1 наведено схему типової системи зв'язку з використанням ПДКУ за стандартом IS-95 Іншу таку систему описано у вже згаданій заявці 08/654 443 Система містить комірки 2а-2д Кожна комірка 2 обслуговується БС 4 У системі знаходяться різні ВС 6, кожна з яких має зв'язок з 0 або більше БС 4 у прямому каналі протягом кожного інформаційного канального кадру Наприклад, БС 4а веде передачу до ВС 6а, 6j, БС 4Ь - до ВС 6b, 6j і БС 4с - до ВС 6с, 6п Як можна бачити з фіг 1, у кожний момент кожна з БС 4 передає дані до 0 або більше БС 6 Швидкість передачі може бути змінною і залежати від відношення сигнал/шум, виміряного у приймаючій ВС 6, і від бажаного відношення енергії на біт до шуму (Еь/No) Для спрощення передачу у зворотному каналі від ВС 6 до БС 4 не показано Фіг 2 містить блок-схему основних підсистем типової системи зв'язку Контролер 10 базових станцій (далі - КБС) має взаємозв'язок з мережевим пакетним інтерфейсом 24, комунальною комутаторною телефонною мережею (ККТМ) ЗО і усіма БС 4 (для спрощення наведено лише одну БС) КБС 10 координує у системі зв'язки між ВС 6 і іншими користувачами, з'єднаними з мережевим пакетним інтерфейсом 24 і ККТМ ЗО ККТМ ЗО забезпечує зв'язок з користувачами через стандартну телефонну мережу (не показану) КБС 10 містить сукупність селекторних елементів 14 (показано лише один для спрощення), кожний з яких призначений керувати зв'язком між однією або більше БС і одною ВС 6 Якщо елемент 14 не був призначений ВС 6, процесор 16 керування сеансом зв'язку одержує вимогу пейджерного виклику ВС 6 Процесор 16 після цього інструк 55477 тує БС 4 надіслати такий виклик до ВС 6 Джерело 20 даних містить дані, призначені для передачі до ВС 6, і надсилає їх до мережевого пакетного інтерфейсу 24, який приймає ці дані і спрямовує їх до селекторного елемента 14 Елемент 14 надсилає дані до кожної з БС 4, що мають зв'язок з ВС 6 У типовому втіленні кожна БС 4 підтримує чергу 40 даних, призначених для передачі до ВС 6 Дані надсилаються пакетами з черги 40 даних до канального елемента 42 У типовому втіленні пакет являє собою фіксовану КІЛЬКІСТЬ даних, призначених для передачі до ВС-адресата одним кадром У кожний пакет даних елемент 42 уводить необхідні контрольні поля У типовому втіленні він додає КЦН (код циклічної надмірності) і додає біти хвостового коду Пакет даних, контрольні біти, біти КЦН і біти хвостового коду утворюють форматований пакет Після ЦЬОГО канальний елемент 42 кодує форматований пакет і переупорядковує символи пакету У типовому втіленні переупорядкований пакет скремблюється довгим псевдошумовим (ПШ) кодом, покривається кодом Уолша і розширюється короткими кодами ПІД і ПШо Розширені дані надходять до радіочастотного (РЧ) вузла 44, що піддає їх квідратурно-фазовій модуляції, фільтрує і підсилює сигнал, який після цього передається антеною 46 прямого каналу 50 Антена 60 у ВС 6 приймає сигнал прямого каналу і спрямовує його до приймача у трансіверному вузлі 62 Приймач фільтрує і підсилює сигнал, піддає його квідратурно-фазовій демодуляції і квантує Цифрований сигнал надходить до демодулятора 64, де він згортається короткими кодами ПІД і ПШо, розкривається кодом Уолша і дескремблюєтья довгим ПШ кодом Декодовані дані надсилаються до декодера 66, який здійснює операції, зворотні виконаним у БС 4, а саме, здійснює зворотне переупорядковування, декодує і перевіряє згідно з КЦН Декодовані дані надходять до користувача 68 Система зв'язку передбачає передачу повідомлень у зворотному каналі У ВС 6 контролер 76 обробляє призначені для передачі дані або повідомлення, спрямовуючи їх до кодера 72 У типовому втіленні кодер 72 форматує повідомлення згідно з форматом "пауза-серія" сигналу, описаним у згаданому вище патенті 5 504 773, після чого генерує і додає набір бітів КЦН і хвостові біти, кодує дані і додані біти і переупррядковує символи кодованих даних Переупорядковані дані надходять до модулятора (МОД) 74 Модулятор 74 може мати багато втілень Згідно з першим, він покриває переупорядковані дані кодом Уолша, що ідентифікує канал даних, призначений для ВС 6 і розширює дані спочатку довгим, потім коротким ПШ кодами Після цього дані надходять до передавача трансіверного вузла 62 Передавач модулює, фільтрує і підсилює сигнал зворотного зв'язку і передає його через антену 60 зворотного каналу 52 У другому втіленні модулятор 74 виконує ті ж функції, що модулятор типової системи ПДКУ стандарту IS-95, а саме, відображає переупорядковані біти у інший простір сигналів, використовуючи відображення Уолша Зокрема, переупорядковані 10 дані групуються у групи з 6 біт Ці 6 біт відображаються у 64-бітову ПОСЛІДОВНІСТЬ Уолша, і модулятор 74 розширює цю ПОСЛІДОВНІСТЬ довгим ПШкодом і короткими ПШ кодами Розширені дані надсилаються до передавача трансіверного вузла 62, ідентичного згаданому вище У обох втіленнях у БС 4 антена 46 приймає сигнал зворотного каналу і надсилає його до РЧ вузла 44, який фільтрує, підсилює, демодулює і квантує сигнал, після чого надсилає цифрований сигнал до канального елемента 42 Елемент 42 згортає цей сигнал, використовуючи короткі ПШ коди і довгий ПШ код, і здійснює відображення Уолша або розкриття залежно від обробки сигналу у ВС 6 Після ЦЬОГО елемент 42 зворотно переупорядковує демодульовані дані, декодує упорядковані дані і виконує перевірку згідно з КЦН Декодовані дані (наприклад, дані повідомлення) надходять до селекторного елемента 14, який спрямовує дані і повідомлення за призначенням Описані технічні засоби забезпечують передачу даних, повідомлень, голосу, відеосигналів тощо у прямому каналі Інша архітектура засобів, здатна забезпечити передачу з різними швидкостями, також входить у об'єм винаходу Формувач 12 розкладів здійснює усі з'єднання з селекторним елементом 14 у КБС 10 і складає розклади швидкісних передач у прямому і зворотному каналах Він одержує розмір черги, який вказує на КІЛЬКІСТЬ даних, що мають бути передані, і іншу необхідну інформацію (див далі), і формує розклад передач, щоб максимізувати загальний обмін даними, додержуючись при цьому обмежень, що існують у системі Як показано на фіг1, ВС 6 розкидано по усій системі зв'язку і вони можуть мати зв'язок з 0 або більше БС У типовому втіленні формувач 12 розкладів координує ШВИДКІСНІ передачі у прямому і зворотному каналах по усій системі зв'язку Цю операцію описано у заявці 08/798 951 на патент США від 11/02/1997, включеній сюди посиланням Прямі канали зв'язку У типовому втіленні прямий канал включає фізичні пілот-канал, канал синхронізації, пейджерний канал, головний канал і керуючий канал Прямі фізичні канали уможливлюють передачі різних логічних каналів При цьому прямий логічний канал включає керування фізичного рівня, керування доступом до інформаційних засобів (КДІ), користувацький інформаційний потік і службові повідомлення На фіг 3 показано співвідношення між фізичними і логічними прямими каналами ЛОГІЧНІ прямі канали розглянуто далі Прямий пілот-канал У типовому втіленні прямий пілот-канал включає немодульований сигнал, який БС 6 використовує для синхронізації і демодуляції, пілот-канал постійно передається БС 4 Прямий канал синхронізації У типовому втіленні цей канал використовується для передачі узгоджуючої часової інформації до ВС 6 і інформування ВС 6 про швидкість передачі пейджерного каналу Структура каналу відповідає вимогам стандарту IS-95 Прямий пейджерний канал У типовому втіленні цей канал використову 12 11 55477 ється для передачі додаткової інформації і спеціадачі даних У типовому втіленні коди Уолша допольних повідомлень до ВС 6, а його структура виміжного каналу передаються до ВС 6 у логічному значається стандартом IS-95 і у ньому використакеруючому каналі, який передається головним но режим пейджерного виклику як з розділенням прямим каналом часу, так і без нього Див патент США 5 392 287, Прямий керуючий канал включений сюди посиланням У типовому втіленні цей канал є каналом з фіксованою швидкістю передачі, асоційований з коПрямий головний канал жною ВС 6 Цей канал використовується для пеУ типовому втіленні ці канали використовуредачі сигналів регулювання потужності передачі і ються для передачі голосу, даних і службових покоротких службових повідомлень для розкладів відомлень від БС 4 до ВС 6 у сеансі зв'язку і вклюпрямого і зворотного каналів (див фігЗ) Розклад чають головні і ДОПОМІЖНІ канали Головні канали містить швидкість передачі даних і тривалість пеможуть використовуватись для передачі голосової редач, призначених прямому і зворотному допоміінформації і інформаційних даних, для швидкісної жним каналам передачі інформаційних даних, службової інформації, керуючих повідомлень фізичного рівня і даВикористання головного каналу може регулюних КДІ (фіг 3) ДОПОМІЖНІ канали використовуютьватись службовими кадрами, що передаються кеся лише для швидкісної передачі даних руючим каналом У типовому втіленні призначення кадрів логічного керуючого каналу визначається У типовому втіленні головний канал є каналом бітом-індикатором у цих кадрах Цей кадр інфорз змінною швидкістю передачі, який може викорисмує ВС 6 про наявність або відсутність адресоватовуватись у одному з двох режимів спеціалізованої до цієї ВС інформації у наступному кадрі голоному або спільному У спеціалізованому режимі вного каналу головний канал використовується для передачі голосової інформації, даних IS-707, швидкісної Керуючий канал також використовується для передачі даних і службової інформації, причому передачі бітів керування потужністю зворотного остання передається у режимі "приглушенняканалу, які інструктують ВС 6 підвищити або знисерія" або "пауза-серія", описаних у згаданому зити потужність передачі, щоб мінімізувати перевище патенті 5 504 773 шкоди для сусідніх ВС 6, підтримуючи при цьому припустимий рівень якості (наприклад, визначений Якщо ВС 6 не має активного перемикача схем частотою помилок) ВІДПОВІДНИЙ спосіб і пристрій обслуговування (голос або факс) головний канал описано у патенті США 5 056 109, включеному може працювати у спільному режимі У цьому висюди посиланням У типовому втіленні ці біти пепадку цей канал спільно використовує група ВС 6, редаються через керуючий канал кожні 1,25мс а прямим керуючим каналом до ВС 6 надсилаєтьДля підвищення ємкості системи і зниження переся інструкція демодулювати призначений їй голошкод службові кадри передаються цим каналом вний канал Спільний режим підвищує пропускну лише тоді, коли є розклад або службова інформаздатність прямого каналу При відсутності голосоція для ВС 6 У іншому разі у керуючому каналі вої інформації або перемикача схем використання передаються лише біти керування потужністю спеціалізованого головного каналу є неефективним, оскільки воно є неповним і обмежується пеУ типовому втіленні керуючий канал діє під час редачею окремих пакетів і службових повідомм'якої передачі зв'язку, щоб підвищити надійність лень Наприклад, головний канал може використойого прийому Цей канал уводиться у м'яку перевуватись для передачі підтверджень протоколу дачу зв'язку і виводиться з неї згідно з IS-95 Для керування передачею (ПКП) Для мінімізації заприскорення формування розкладу, для зворотнотримок при передачі службових повідомлень і інго і прямого каналів, службовим кадрам надано формаційних даних значне зниження швидкості тривалості (5мс) , учетверо коротшої за тривалість передачі у головному каналі є неприйнятним Кільінформаційних кадрів (20мс) ка головних каналів, що не повністю використовуСтруктура кадру керуючого каналу ються, можуть погіршити ефективність роботи сисУтабл 1 та 2 наведено формати кадрів прямотеми (наприклад, знизити швидкість передачі го і зворотного керуючих каналів, ВІДПОВІДНО Вишвидкісних даних) користання окремих кадрів для цих каналів дозволяє формувати розклади окремо для зворотного і У типовому втіленні для визначення спільного прямого керуючих каналів режиму головного каналу для певної ВС 6 використовується біт-індикатор, який надсилається у У типовому втіленні формату (табл 1) кадру прямому керуючому каналі Цей біт є індикатором керуючого прямого каналу цей кадр містить тип для усіх ВС 6 групи, коли повідомлення надсилакадру, швидкість передачі, призначеної для прямоється спільним головним каналом У іншому варіаго каналу, і тривалість цього призначення Тип нті цей біт-індикатор встановлюється лише для кадру вказує, що кадр керуючого каналу відповідає певної ВС 6, якій адресовано наступний інформарозкладу для прямого каналу, або розкладу для ційний кадр каналу зворотного каналу, або активній групі допоміжного каналу, або БІС і індикатору головного каналу Прямий допоміжний канал Кожний з форматів розглянуто далі Швидкість У типовому втіленні цей канал обслуговує передачі прямого каналу визначає швидкість пешвидкісну передачу даних У цьому каналі кадр редачі даних, що надходять, а у полі тривалості можна передавати з швидкістю, що належить назанесено тривалість цього призначення Типові бору швидкостей, і її значення передається до ВСКІЛЬКОСТІ біт для цих полей наведено у табл 1, хоча адресата 6 службовим повідомленням (наприклад, винахід припускає також ІНШІ КІЛЬКОСТІ розкладом для прямого каналу) Отже, у ВС 6 нема потреби динамічно визначати швидкість пере 13 55477 ТАБЛИЦЯ 1 Опис КІЛЬКІСТЬ Тип кадру Швидкість передачі прямого каналу Тривалість призначення швидкості передачі прямого каналу Усього 2 4 14 інструктує ВС 6 демодулювати головний канал для одержання інформації 4 10 У типовому втіленні (табл 2) формат кадру керуючого зворотного каналу містить тип - кадру, швидкість передачі, призначеної для зворотного каналу, і тривалість цього призначення Швидкість передачі для зворотного каналу визначає швидкість передачі даних, а у полі тривалості занесено тривалість цього призначення ТАБЛИЦЯ 2 Опис КІЛЬКІСТЬ біт Тип кадру 2 Швидкість передачі зворотного 4 каналу Тривалість призначення швидко12 (4 на носій) сті передачі зворотного каналу Усього 18 У типовому втіленні БС 4 може приймати від ВС 6 повідомлення, що ідентифікують найсильніший пілот-сигнал Активної групи цієї ВС і усі ІНШІ пілот-сигнали, рівень яких відрізняється від найсильнішого менш, ніж на зумовлене значення ДР (див далі) У ВІДПОВІДЬ на таке повідомлення БС 4 надсилає у керуючому каналі службовий кадр, яким ідентифікує нову групу допоміжних каналів для ВС 6 У типовому втіленні кодовані канали, що відповідають допоміжним каналам для усіх членів Активної групи, визначаються службовими повідомленнями до ВС 6 У табл 3 наведено формат кадру керуючого каналу, який використовується БС 4 для ідентифікації нового набору БС 4, від яких передаються кадри допоміжного каналу У типовому втіленні цей кадр включає тил кадру, і допоміжну Активну групу Поле допоміжної Активної групи має вигляд бітової маски, тобто " 1 " у І-ІЙ позиції означає, що допоміжний канал передається і-ою БС 4 Активної групи ТАБЛИЦЯ З Опис Тип кадру Допоміжна Активна група Усього ТАБЛИЦЯ 4 біт КІЛЬКІСТЬ біт 2 4 8 Для типового втілення табл 4 дає формат кадру керуючого каналу, який використовується для передачі біта-індикатора головного каналу і БІС Тут кадр керуючого каналу містить тип кадру, БІС головного і допоміжного каналів і біт-індикатор головного каналу БІС допоміжного каналу вказує, чи був стертий попередній кадр зворотного допоміжного каналу Біт-індикатор головного каналу Опис Тип кадру БІС зворотного головного каналу БІС зворотного допоміжного каналу Усього КІЛЬКІСТЬ біт 2 1 1 5 Зворотні канали зв'язку У типовому втіленні зворотний канал включає фізичні канал доступу, пілотний/керуючий канал, головний канал і керуючий канал Зворотні фізичні канали уможливлюють передачі різних логічних каналів Зворотний логічний канал включає керування фізичного рівня, КДІ, користувацький інформаційний потік і службові повідомлення На фіг 4 показано співвідношення між фізичними і логічними зворотними ЛОГІЧНІ зворотні канали розглянуто далі Зворотний канал доступу У типовому втіленні цей канал використовується ВС 6 для передачі до БС 4 початкового повідомлення з вимогою головного каналу, а також для ВІДПОВІДІ на пейджерні виклики Структура цього каналу визначається стандартом IS-95 Зворотний головний канал У типовому втіленні зворотні канали зв'язку використовуються для передачі голосу, даних і службових повідомлень від ВС 6 до БС 4 у сеансі зв'язку і включають головні і ДОПОМІЖНІ канали Головні канали можуть використовуватись для передачі голосової інформації і інформаційних даних, для швидкісної передачі інформаційних даних, службової інформації і даних КДІ ДОПОМІЖНІ канали використовуються лише для швидкісної передачі даних Структура кадру зворотного головного каналу відповідає стандарту IS-95, тобто швидкість передачі для допоміжного каналу може змінюватись динамічно і при демодуляції прийнятого сигналу у БС 4 використовується процедура визначення цієї швидкості, описана у заявці 08/233 570 від 26/04/1994 і у заявці 08/730 863 від 18/10/1996 на патент США У типовому втіленні службова інформація передається у головному каналі у режимі "приглушення-серія" або "пауза-серія", описаних у згаданому вище патенті 5 504 773 Зворотний допоміжний канал У типовому втіленні цей канал обслуговує швидкісну передачу даних У цьому каналі кадр можна передавати з різними швидкостями Вимога певної швидкості передачі надходить від ВС 6 і задовольняється БС 4 Зворотний пілотний/керуючий канал У типовому втіленні ПІЛОТНІ і службові дані передаються у зворотному пілотному/керуючому каналі з часовим мультиплексуванням Службова інформація включає керування фізичного рівня і КДІ Керування фізичного рівня включає БІС для прямих головного і допоміжного каналів, біти керування потужністю прямого каналу, міжкоміркові Д рівні потужності і рівні потужності носіїв, КДІ вклю 15 55477 чає розмір черги, який вказує на КІЛЬКІСТЬ інформації, призначеної для передачі від ВС 6 у зворотному каналі і поточний запас потужності ВС 6 БІС для прямих головного і допоміжного каналів вказують на те, що було стерто кадр два кадри тому відносно кадру прямого каналу, який несе ВІДПОВІДНИЙ БІС (див патент США 5 568 483, включений сюди посиланням) У типовому втіленні прямий головний і/або допоміжний канал може передаватись "найкращою" групою БС 4, що дає змогу використати просторову диверсифікацію і зменшити потребу потужності передачі у прямих інформаційних каналах Міжкоміркові Д рівні потужності передаються від ВС 6 у пілотному/керуючому каналі і вказують для БС 4 різниці між рівнями енергії сигналів прийнятих у ВС 6 від базових станцій 4 БС 4 використовують цю інформацію, щоб визначити "найкращу" групу БС 4 для передачі у прямих головному і допоміжному каналах Міжкоміркові Д рівні потужності ідентифікують пілот-сигнал Активної групи ВС 6 з найвищим відношенням енергії на біт до шуму (Ес/Іо) і усі пілотсигнали, у яких Ес/Іо відрізняється від найкращого менш, ніж на зумовлене значення ДР Спосіб і пристрій для вимірювання потужності пілотсигналів описано у заявці 08/722 763 на патент США від 27/09/1996 У типовому втіленні пілотсигнал (або відповідна БС 4) з найвищим Ес/Іо У Активній групі ідентифікується трьома бітами, а КІЛЬКІСТЬ членів Активної групи обмежена 6 Отже п'ятибітове поле-маска може бути використана для ідентифікації усіх пілот-сигналів, у яких Ес/Іо відрізняється від найкращого менш, ніж на ДР Наприклад, " 1 " може вказувати на такий пілотсигнал, а "0" - на пілот-сигнал, у якого Ес/Іо відрізняється від найкращого більш, ніж на ДР Отже, для Д рівнів потужності використано 8 біт (див табл 5) ТАБЛИЦЯ 5 Опис БІС головного каналу КІЛЬКІСТЬ біт 1 16 БІС допоміжного каналу 1 Міжкоміркові Д рівні потуж8(3 + 5) ності МІЖНОСІЙНІ рівні потужності 12 (4 біти на носій) Розмір черги 4 Запас потужності 4 Фіг5А, 5Б ілюструють використання міжкоміркових Д рівнів потужності для керування передачею у прямому допоміжному каналі Спочатку БС А передає головний і допоміжний канали, а БС В та БС С - головний канал ВС 6 виміряє потужність прямого каналу і виявляє, що рівень потужності, прийнятої від БС С, перевищує рівень від БС А, і передає значення міжкоміркових Д рівнів потужності до БС, сповіщаючи про це У ВІДПОВІДЬ передача прямого допоміжного каналу від БС А переводиться до БС С У типовому втіленні МІЖНОСІЙНІ рівні потужності вскористовуються, щоб інформувати БС про прийняту потужність кожного з носіїв При наявності багатьох носив вони можуть зазнавати затухання незалежно і може статись, що один або більше носив зазнають глибокого затухання, в той час, як решта має значно вищу силу при прийомі Тому ВС 6 вказує сили носив, використовуючи МІЖНОСІЙНІ рівні потужності Типовий спектр прийнятого багатоносійного сигналу ілюстровано діаграмою фіг 6, де можна бачити, що серед прийнятих носив носій С є найслабкішим У типовому втіленні потужність цих носіїв разом визначається бітами керування потужністю прямого каналу БС 4 можуть використовувати МІЖНОСІЙНІ рівні потужності для призначення різних швидкостей передачі цим носіям або для збільшення потужності передачі слабкішого носія, щоб усі носи мали однакове відношення енергії на біт до шуму (Ес/Іо) У типовому втіленні максимальна КІЛЬКІСТЬ швидкостей передачі для зворотного каналу, для якого формується розклад, становить 16 Отже, для квантування запасу потужності треба мати 16 рівнів квантування Максимальна швидкість передачі у зворотному каналі визначається формулою Макс_шв = Поточна_шв_звор каналу + (Запас_потужності/Еь_бажане) де Еь_бажане - бажана енергія на біт, яку має забезпечити ВС 6 у зворотному каналі 3 рівняння (1) можна бачити, що, якщо БС 4 використовує 4 біти для визначення призначеної швидкості передачі, то внаслідок взаємно однозначного співвідношення між "Макс_шв" і "Запас_потужності" останній параметр також можна визначити чотир ма бітами У типовому втіленні передбачено три носія, тобто МІЖНОСІЙНІ рівні потужності потребують 12 біт для визначення сили кожного з трьох носіїв (4 біти на кожного) Після ТОГО, ЯК БС 4 визначила швидкість передачі, тривалість м призначення може бути обчислена з розміру черги, переданого від ВС 6 Розмір_черги = Шв_передачі_зв каналу х Тривалість_призначення Отже, розрядність репрезентування розміру черги має бути такою ж, як і для тривалості призначення швидкості передачі (4 біти) Розглянутий приклад передбачає використання 16 біт для репрезентування розкладу і наявність трьох носив Винахід передбачає також використання інших кількостей біт і носив Узгодження у часі і формування розкладів (1) (2) Як уже відзначалось, службові дани мультиплексуються з пілотними У типовому втіленні службову інформацію розподілено у кадрі, щоб забезпечити безперервну передачу Кожний кадр тривалістю 20мс додатково розділено на 4 однакові службові кадри тривалістю 5мс кожний Винахід припускає також розділення кадру прямого каналу на іншу КІЛЬКІСТЬ службових кадрів 17 Формат типовогокадру зворотного пілотного/керуючого кадру наведено на ф і г 7 А У типовому втіленні міжкоміркові Д рівні потужності 112 передаються у першому службовому кадрі, міжноСІЙНІ рівні потужності 1 1 4 - у другому, біти БІС 116 у третьому, і вимога на швидкість передачі у зворотному каналі (вимога ЗК) 1 1 3 - у четвертому Типову часову діаграму швидкісної передачі даних у зворотному каналі наведено на фіг 7Б ВС 6 передає до БС 4 вимогу ЗК у четвертому службовому кадрі основного кадру і (блок 212) У типовому втіленні ця вимога містить розмір черги (4 біти) і запас потужності (4 біти) Канальний елемент 42 приймає цю вимогу і надсилає її разом з значенням Еь/No, якого вимагає ВС, до формувача 12 розкладів у першому службовому кадрі кадру і + 1 (блок 214) Формувач 12 приймає вимогу у третьому службовому кадрі кадру і + 1 (блок 216) і включає вимогу у розклад, після чого надсилає розклад до канального елемента 42 у першому службовому кадрі кадру і + 2 (блок 218) Елемент 42 приймає розклад у третьому службовому кадрі кадру і + 2 (блок 220) Службовий кадр прямого каналу передається у третьому службовому кадрі кадру і + 2 (блок 222) до ВС 6, яка приймає розклад для зворотного каналу у четвертому службовому кадрі кадру і + 2 (блок 224) і починає передавати з швидкістю згідно з розкладом у кадрі і + З (блок 226) БС 4 використовує міжкоміркові Д рівні потужності, передані у першому службовому кадрі від ВС 6, для того, щоб обрати БС 4 для передачі допоміжного каналу Цю процедуру ілюструє ф і г 7 В ВС 6 передає міжкоміркові Д рівні потужності у першому службовому кадрі кадру і до БС 4 (блок 242) Канальний елемент 42 приймає міжкоміркові Д рівні потужності і надсилає інформацію у другому службовому кадрі кадру і (блок 244) до КБС 10, який приймає цю інформацію у четвертому службовому кадрі кадру і (блок 246), після чого визначає нову Активну групу для допоміжних каналів у першому службовому кадрі кадру і + 1 (блок 248) Канальний елемент 42 приймає службовий кадр прямого каналу з новою допоміжною Активною групою і передає и у прямому керуючому каналі у третьому службовому кадрі кадру і + 1 (блок 250) ВС 6 закінчує декодувати кадр прямого керуючого каналу у четвертому службовому кадрі кадру і + 1 (блок 252) і починає демодулювати новий допоміжний канал у кадрі і + 2 (блок 254) БС 4 використовує МІЖНОСІЙНІ рівні потужності, передані у другому службовому кадрі від ВС 6, для призначення швидкостей передачі кожному з носіїв для ВС 6 Таку процедуру ілюструє фіг 7Г ВС 6 передає МІЖНОСІЙНІ рівні потужності у другому службовому кадрі кадру і до БС 4 (блок 262) Канальний елемент 42 декодує цей кадр у третьому службовому кадрі кадру і (блок 264), а БС 4 приймає МІЖНОСІЙНІ рівні потужності і призначає швидкості передачі носіям у четвертому службовому кадрі кадру і (блок 266) Службовий кадр прямого каналу з швидкостями передачі для носив передається у першому службовому кадрі кадру і + 1 (блок 268) ВС 6 закінчує демодуляцію службового кадру прямого каналу у другому службовому кадрі кадру і + 1 (блок 270) і починає демодулювати згідно з 55477 18 новими швидкостями для носіїв у кадрі і + 2 (блок 272) У типовому втіленні біти-показники стирання (БІС) передаються у третьому службовому кадрі у пілотному/керуючому каналі, щоб інформувати про прийом стертого кадру у головному і допоміжному каналах у ВС 6 БІС можуть бути використані підсистемою швидкої передачі як підтвердження рівня 2 або негативне підтвердження замість кадрів протоколу радіозв'язку RLF стандарту IS-707 БІС згідно з винаходом є коротшими і викликають меншу затримку при обробці, ніж кадри NACK RFL Типову часову діаграму, що ілюструє передачу БІС, наведено на ф і г 7 Д ВС 6 приймає дані у інформаційному прямому каналі у кадрі і - 2 (блок 282), закінчує декодування кадру і - 2 і визначає, чи був стертий цей кадр у першому службовому кадрі кадру і (блок 284), після чого передає БІС, що вказують на стан кадру і - 2 прямого інформаційного каналу, у третьому службовому кадрі кадру і (блок 286) Описаний вище формат кадру пілотного/керуючого каналу мінімізує затримку при обробці інформації такого кадру У деяких системах зв'язку інформація з цих кадрів не використовується і вони не потрібні Наприклад системи з використанням одного носія не потребують МІЖНОСІЙНИХ рівнів потужності У інших системах ця додаткова інформація використовується для виконання різних системних функцій Отже формати кадру пілотного/керуючого каналу, які несуть різні типи інформації входять у об'єм винаходу Режими роботи ВС У типовому втіленні для більш повного використання пропускної здатності прямого і зворотного каналів, інформаційні канали у період відсутності активності вивільняються У типовому втіленні ВС 6 працює у одному з трьох режимів інформаційному канальному режимі, режимі очікування або режимі спокою Перехід з одного режиму у інший залежить від тривалості періоду неактивності Ф і г 8 А ілюструє перехід у режими очікування і спокою, а фіг 8Б - переходи між різними режимами БС 6 працює у інформаційному канальному режимі 312а, 312Ь і 312с, що відповідає активності у прямому і/або зворотному каналах (фіг8А), і у такому ж режимі 312 на фіг 8А Період неактивності Тсііе є часом, що пройшов з моменту останньої передачі даних У типовому втіленні, якщо Tdie перевищить перший зумовлений поріг Ts, ВС 6 переводиться у режим очікування 314 Якщо у цьому режимі період неактивності Tdie перевищить другий зумовлений поріг Td (Тсі > T s ), ВС переводиться у режим спокою 316 Якщо у режимі спокою або режимі очікування БС 4 або ВС 6 має дані, що мають бути передані, ВС 6 одержує інформаційний канал і переводиться назад у інформаційний канальний режим (фіг 8Б) У типовому втіленні T s обирають рівним приблизно 1с, a Td - приблизно 60с, хоча винахід включає і ІНШІ значення Ts, Td Режим очікування ВС 6 входить у режим очікування після перевищення періодом неактивності зумовленого періоду T s У типовому втіленні у цьому режимі інформаційний канал вивільняється, але інформація про стан зберігається як у ВС 6, так і у БС 4, і ВС може 19 55477 бути швидко переведена назад у інформаційний канальний режим Інформація про стан включає стан RLP, стан інформаційного каналу, параметри кодування і ЗМІННІ аутентифікацм Ця інформація про стан відповідає стандартам IS-95 і IS-707 Стан інформаційного каналу може включати стан обслуговування, варіанти обслуговування і їх характеристики, а також параметри регулювання потужності Оскільки ЦЯ інформація зберігається, ВС 6 може бути повернуту у інформаційний канальний режим з призначенням їй інформаційного каналу ВІДПОВІДНИМ повідомленням У типовому втіленні ВС 6, перебуваючи у режимі очікування веде безперервний моніторинг пейджерного каналу в усіх щілинах і обробляє усі прийняті повідомлення, адресовані до усіх ВС 6 на цьому каналі ВС 6 може надсилати повідомлення до БС 4, інформуючи КБС 10 про своє поточне місцезнаходження На схемі (фіг8В) показано, як ВС 6к, що знаходиться у режимі очікування, надсилає повідомлення про своє місцезнаходження після виявлення нового пілот-сигналу ВС бк приймає пілот-сигнали від БС 4і, 4j і новий пілотсигнал від БС 4к Після цього ВС 6к надсилає у зворотному каналі повідомлення про своє місцезнаходження, яке приймають БС 4і, 4j і 4к Крім того, ВС 6 надсилає інше повідомлення про своє місцезнаходження у випадку, якщо рівень пілотсигналу від одної з БС 4 впаде нижче зумовленого порогу У типовому втіленні це останнє повідомлення пересилається до КБС 10 від БС 4 Отже, КБС 10 завжди знає про місцезнаходження ВС 6 і може сформувати повідомлення про призначення каналу і перевести цим ВС 6 у інформаційний канальний режим в умовах м'якої передачі зв'язку Режим спокою У типовому втіленні, знаходячись у режимі спокою, ВС 6 веде моніторинг пейджерного каналу у ЩІЛИНІ, зберігаючи цим енергію елемента живлення Цей режим є подібним до режиму спокою стандарту IS-707 У цьому режимі ні ВС 6, ні БС 4 не зберігають даних про стан У БС 4 і ВС 6 зберігається лише інформація про стан протоколу (РРР) двостороннього зв'язку Завдяки цьому ВС 6 і БС 4 проходять стадію встановлення зв'язку (яка включає пейджерний виклик, ВІДПОВІДЬ на нього і призначення каналу) до призначення інформаційного каналу для ВС 6 і відновлення інформаційного канального режиму Перехід до інформаційного канального режиму У типовому втіленні перехід ВС 6 з режиму очікування або спокою у інформаційний канальний режим може бути ініційований як БС 4, так і ВС 6 Фіг9А, 9Б містять діаграми, що ілюструють, відпо 20 відно, протоколи ініційованого БС переходу від режимів очікування і спокою до інформаційного канального режиму БС 4 ІНІЦІЮЄ процес, якщо має дані для передачі до ВС 6 Якщо ВС 6 знаходиться у режимі очікування (фіг9А), БС 4 передає у пейджерному каналі повідомлення про призначення каналу, після чого може негайно почати передачу даних Якщо ВС 6 знаходиться у режимі спокою (фіг9Б), БС 4 спочатку передає пейджерне повідомлення у пейджерному каналі ВС 6 приймає це повідомлення і передає підтвердження прийому цього повідомлення Після ЦЬОГО БС 4 передає повідомлення про призначення каналу Після серії службових повідомлень, визначаючих параметри, встановлення зв'язку завершується і починається передача даних Як показано на фіг9А, 9Б, перехід від режиму очікування до інформаційного канального режиму відбувається швидше, ніж перехід у цей режим з режиму спокою, оскільки у першому випадку цей стан сеансу зв'язку підтримується як у ВС 6, так і у БС 4 На фіг9В, 9Г наведено діаграму, що ілюструє протокол ініційованого ВС 6 переходу від режимів очікування і спокою до інформаційного канального режиму ВС 6 ІНІЦІЮЄ процес, якщо має дані для передачі до БС 4 Якщо ВС 6 знаходиться у режимі очікування (фіг9В), вона передає повідомлення з вимогою відновлення зв'язку до БС 4, яка у ВІДПОВІДЬ передає повідомлення про призначення каналу і починає передачу даних Якщо ВС 6 знаходиться у режимі спокою (фіг9Г), вона спочатку передає повідомлення про початок зв'язку до БС 4, яка у ВІДПОВІДЬ передає повідомлення про призначення каналу Після серії службових повідомлень, визначаючих параметри, встановлення зв'язку завершується і починається передача даних Згідно З наведеним описом винахід передбачає створення кількох фізичних каналів, які уможливлюють зв'язок через багато логічних каналів, описаних вище Для виконання додаткових функцій, потреба у яких може виникнути у системі, можуть бути створені ІНШІ фізичні канали Крім того, описані вище канали можуть бути мультиплексовані і/або об'єднані для виконання бажаних функцій і такі комбінації фізичних каналів входять у об'єм винаходу Наведений опис бажаних втілень дає змогу будь-якому фахівцю застосувати винахід, запровадивши, якщо необхідно, бажані зміни і модифікації, використовуючи для цього основні концепції винаходу і знаходячись у його межах Описані втілення не обмежують винаходу, основні принципи і нові концепції якого забезпечують значно ширше застосування Фіг.2 ЛОГІЧНІ КАНАЛИ ПРЯМОГО КАНАЛУ ФіЗИЧН КАНАЛИ ПРЯМОГО КАНАЛУ ЗВ'ЯЗКУ КЕРУВАННЯ ФІЗИЧНОГО РІВНЯ - БІС ГОЛОВНОГО ! ДОПОМІЖНОГО КАНАЛІВ - КЕРУВАННЯ ПОТУЖНІСТЮ ЗЄОР. КАНАПУ ПШОТ-КАНАЛ КАНАЛ СИНХРОИІЗДЦ» КДі - РОЗКЛАД ЗВОР КАНАЛУ - Р О З К Л А Д ПРЯМОТО КАНАПУ ПЕЙДЖЕРНИИ КАНАЛ СЛУЖБОВУ»** КАНАЛ ГОПО8ИИИ.СМДГ / КОРИСТУВАЦЬКИЙ И Э ПОТІК 1 іПЄРБИННИЙ) КОРИСТУВАЦЬКИЙ H Q П О Л К її (ВТОРИННИЙ) КОРИСТУВАЦЬКИЙ ^ИГ- ГОТІК N СЛУЖБОВІ ПОВЩОМЯЕ-'Н*' Фіг.З 23 55477 24 МАЖКОМІРКОШ РІВНІ ПОТУЖНОСТІ ПОПЧНІ КАНАЛИ ЗВОРОТНОГО КАНАЛУ ЗВ'ЯЗКУ ФІЗИЧНІ КАНАЛИ ЗВОРОТНОГО КАНАЛУ ЗВ'ЯЗКУ КЕРУВАННЯ ФІЗИЧНОГО РІВНЯ -БІС ГОЛОВНОГО! ДОПОМІЖНОГО КАНАЛІВ - КЕРУВАННЯ ПОТУЖНІСТЮ ПРЯМОГО КАНАЛУ - MDKKOMlPKOBi А РІВНІ ПОТУЖНОСТІ - ЙШНОСІЙН! РІВНІ ПОТУЖНОСТІ КАНАЛ ДОСТУПУ ПШОТНИИ/СЯУЖБОбИЙ КАНАЛ КДІ - РОЗМІР ЧЕРГИ -ЗАЛАС ПОТУЖНОСТІ ГОЛОВНИЙ КАНАЛ КОРИСТУВАЦЬКИЙ (НФ. ПОТІК 1 (ПЕРВИННИЙ) ДОПОМІЖНИЙ КАНАЛ КОРИСТУВАЦЬКИЙ ІНФ. ПОТІК 2 (ВТОРИННИЙ) КОРИСТУВАЦЬКИЙ ІНФ. ПОТІК N СЛУЖБОВІ ПОВІДОМЛЕННЯ Фіг.4 МІЖКСШРКОВі А 8КАЗ>ЮТЬ, ЩО РІВЕНЬ ПОТУЖНСС"* ВІД БС С ПЕРЕВИЩУЄ РІВЕНЬ ПОТУЖгОСТІ БЩ5СА ПРЯМИЙ ДОПОМІЖНИЙ КАНАЛ ПЕРЕДАНО ВІД БС А ДО &С С головний головний БС8 ГОЛОВНИЙ аспойї» «н-ч* ФІГ.5А ФІГ.5Б НОСІЙ А НОСІЙ В наем с Фіг.6 •І КАДР * — І СЛУЖБОВИЙ КАДР •112 -116 д °ІВНІ ПОТУЖНОСТІ ВИМОГА ЗК РІЗНІ ПОТУЖНОС1 4-І* КДДР І ФІГ.7А 55477 25 26 ^•222 /-224 &С ПЕРЕДАЄ СЛУЖ БОВИЙ КАДР З РОЗКЛАДОМ ДЛЯ 380Р, КАНАЛУ ВС ПЕРЕДАЄ ВИМОГУ ЗК вс декодує СЛУЖ ЕОВИЙ КАДР І ПРИЙМАЄ РОЗКЛАД ДПЯЗВОР КАНАЛУ -214 КАНАЛЬНИЙ ЕЛЕМЕНТ НАДСИП£€ ФСРМУЙАЧ НАДСИЛАЄ РОЗКЛАД ДО КАНАЛЬНСГС EF1SMEH7A ФОРМУВАЧ ПРИЙМАЄ вимогу і УВОДИТЬ !І У РОЗКЛАД ^220 ,-226 КАНАЛЬНИЙ ЕГЕЗ-ІЄНТ ПРИЙМАЄ РОЗКЛАД ВС ПОЧИНАЄ ПЕРЕДА6ДТИ З ШВВДК1СТЮ ЗГЩНО З РОЗКЛАДОМ КАДР ФІГ.7Б КБС ФОРМУЄ МОВУ АКТИВНУ ГРУПУ ДЛЯ ДОПОМІЖНИХ КАНАЛІВ ПРИЙМАЄ СЛУ=КЄО@ИЙ Кддр ПРЯМОГО КАНАЛУ З НОВОЮ ДОПО¥ГЖНОЮ АКТИВНОЮ ГРУПОЮ і ГО У ПРЯ ^-244 КАНАЛЬНИЙ ЕЛЕМЕНТ І ДС КБС ЗАВЕРШУЄ ДЕКСДУВДНН^ СЛУЖ6О8ОГО КАДРУ ПРЯМОГО КАНАПУ нБС ПРИЙМАЄ .^254 ВС ПОЧИНАЄ ДЕМОДУЛЮВ А Т И НОВИЙ ДОПОМІЖНИЙ КАНАП Д РІВНІ ПОТУЖНОСТІ ЦЛҐ ФІГ.7В ^-262 /-266 БС ПРИЗНАЧАЄ ШВИДКОСТІ ПЕРЕДАЧ! НОС!Я?Л 8С Пс^ЕДАгі МЙКНОСіИНІ РІВНІ ПОТУЖНОСТІ ВС ЗАВЕРШУЄ ДЄКОДУВйННЯ СПУЖБОВОГО КАД^У ПРЯМОГО КАНАЛУ /-264 КАНАЛЬНИЙ ЕЛЕМЕНТ ДЕКОДУЄ КАДР СЛУЖБОВКИ КАДР ПРЯМОГО КАНАЛУ З ШВИДКОСТЯМИ ПЕРЕДАЧ» ДЛЯ НОСИВ ПЕРЕДАНО SC ПОЧИНАЄ ДЕМОДУЛЮВА7И згшно з новими швидкостями ПЕРЕДАЧІ ДЛЯ Н С З ОШ 27 55477 28 -286 ,-282 ЄС ПЕРЕДАЄ БІС ДЛЯ ГОЛОВНОГО КАБО ДОПОМІЖНОГО КАДРУ і - 2 SC ЗАВЕРШУЄ ДЕКОДУВАННЯ КАДРУ * - 21 ВИЗНАЧАЄ, ЧИ БУВ СТЕРТЫЙ ЦЕЙ КДДР ВС ПРИЙМАЄ КАДР • 2 ІНФОРМАЦІЙНОГО КАНАЛУУ ПРЯМОМУ КАНАЛІ ФІГ.8Б ВС У РЕЖИМ! спокою вс ПЄИДЖЕРНЕ ПОВІДОМЛЕННЯ ПІДТВЕРДЖЕННЯ ПОВІДОШІЕНИЯПРО оч» БС .-,ня ЯРО СЛУЖ50В! КАНАЛІ V ПЕРЕДАЛА ДАНИХ \ / А V ФІГ.9А N і ФІГ.9Б 29 ЗО 55477 ВС У РЕЖИМІ СПОКОЮ ВС. БС повідомлення ПРО ПОЧАТОК ЗВ'ЯЗКУ ОЧІКУВАННЯ ВС ПОВЩОМЕННЯ ПРО ПРИЗНАЧЕННЯ КАНАЛУ ПОВІДОМЛЕННЯ ПРО ВІДНОВЛЕННЯ ЗВ'ЯЗКУ СЛУЖБОЄІ ПОВІДОМЛЕННЯ повідомлення ПРО призначення КАН&ПУ А * \ _—К ПЕРЕДАЧА ДАНИХ Гч Л \ / / ПЕРЕДАЧІ ДАНИХ ФІГ.9Г ФІГ.9В Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24 \
ДивитисяДодаткова інформація
Назва патенту англійськоюChannel structure of a communication system; transmitter and receiver for the system with such a structure
Автори англійськоюRezajifar Ramin
Назва патенту російськоюКанальная структура системы связи; передатчик и приемник для системы с такой структурой
Автори російськоюРезайифар Рамин
МПК / Мітки
МПК: H04Q 7/38
Мітки: зв'язку, системі, такої, приймач, структура, передавач, канальна
Код посилання
<a href="https://ua.patents.su/15-55477-kanalna-struktura-sistemi-zvyazku-i-peredavach-ta-prijjmach-dlya-tako-sistemi.html" target="_blank" rel="follow" title="База патентів України">Канальна структура системи зв’язку і передавач та приймач для такої системи</a>
Система цифрової передачі та використовувані в системі передавач і приймач.
Номер патенту: 37174
Опубліковано: 15.05.2001
Автори: Брукерс Альфонс Антоніус Марія Ламбертус, Велдейс Раймонд Ніколас Йохан, Рудо Жан Ів, Деері Ів Франсуа, Ро Жан Бернар
МПК: H04B 1/66
Мітки: використовувані, приймач, передавач, системі, цифрової, передачі, система
Формула / Реферат:
1.Система цифровой передачи, содержащая передатчик и приемник, причем передатчик содержит поддиапазонный кодер (3, б, 9), а приемник содержит поддиапазонный декодер (13, 16, 19), при этом поддиапазонный кодер имеет вход для приема цифрового сигнала, такого, как цифровой аудиосигнал, с заданной частотой дискретизации Fs, и М выходов для выдачи М сигналов поддиапазонов с уменьшением частоты дискретизации, а поддиапазонный декодер имеет М входов...
Система передачі даних, передавач, приймач та носій інформації для використання в цій системі
Номер патенту: 29390
Опубліковано: 15.11.2000
Автори: Блютген Бйорн, Спіро Ричард Сес
МПК: G11B 27/34, G11B 20/10, G11B 20/00
Мітки: системі, передавач, носій, передачі, приймач, використання, система, інформації, цій, даних
Текст:
...формат текстового пакета. Показанный текстовый пакет содержит сорок восемь байт по восемь бит каждый. Первые восемь байт используют для передачи параллельных управляющих кодов. Параллельные управляющие коды содержат позиционные коды 21РС и 2РС. Позиционный код 21РС указывает положение строки, в котором соответствующая строка текста должна быть отображена на 21-строчном дисплее. Позиционный код 2РС указывает положение строки соответствующей...
Система інтерактивної ігрової і/або соціологічної взаємодії (сіісв), здійснюваної під час радіо- і/або телепередачі, і спосіб такої взаємодії з використанням цієї системи (варіанти)
Номер патенту: 48558
Опубліковано: 15.08.2002
Автори: Котєльніков Сєргєй Івановіч, Куліков Дмітрій Євгєньєвіч, Сєргєйцев Тімофєй Ніколаєвіч
МПК: A63F 13/00, A63F 3/08
Мітки: взаємодії, цієї, радіо, здійснюваної, система, спосіб, такої, ігрової, варіанти, системі, соціологічної, інтерактивної, телепередачі, використанням, сіісв
Формула / Реферат:
Спосіб вимірювання вигину артилерійського ствола, в якому формують на початку ствола модульований світловий пучок, направляють його вздовж ствола, відбивають світловий пучок від розміщеного на кінці ствола відбивача і направляють його через об'єктив на фотоприймач фотоприймального датчика, який відрізняється тим, що формують в площині діафрагми, розташованої безпосередньо перед відбивачем, світлову зону з розмірами, більшими за суму розмірів...
Система для відкритого електронного бізнесу, довірені агенти, що у ній використовуються, і спосіб здійснення відкритого електронного бізнесу за допомогою такої системи
Номер патенту: 40645
Опубліковано: 15.08.2001
Автор: Розен Шолом С.
МПК: G06Q 30/00, G06Q 50/00, G06Q 20/00, G07F 7/08, G07G 1/12, G07F 17/00, G07F 7/10
Мітки: спосіб, допомогою, агенти, бізнесу, система, системі, такої, ній, використовуються, відкритого, довірені, здійснення, електронного
Формула / Реферат:
1. Система для открытого электронного бизнеса, содержащая первый и второй денежные модули, отличающаяся тем, что в ней предусмотрены доверенный агент покупателя и доверенный агент продавца, причем доверенный агент продавца выполнен с возможностью установления первого криптографически безопасного сеанса связи с доверенным агентом покупателя и передачи электронного товара при первом криптографически безопасном сеансе связи доверенному агенту...
Радіочастотний підсилювач та передавач
Номер патенту: 32415
Опубліковано: 15.12.2000
Автор: Блек Грегорі Р.
МПК: H03G 3/30
Мітки: підсилювач, радіочастотний, передавач
Текст:
...на рис.1. Радиоте лефонная система связи содержит стационарную приемопередающую станцию 101, которая посылает ВЧ-сигналы на переносные и мобильные радиотелефоны, находящиеся в пределах географи ческой зоны охвата. Одним из таких телефонов является переносной радиотелефон 103. Радиотелефонной системе связи выделяется частотный диапазон, в пределах которого разрешается осуществлять радиосвязь. Указанный частотный диапазон разбивается на...
Попередній патент: Зубна щітка
Наступний патент: Зворотна емульсія для обробки карбонатного пласта
Випадковий патент: Спосіб комплексної психофармакотерапії шизофренії у жінок