Оптично зчитуваний носій запису, що дозволяє записування, пристрій для виготовлення носія запису, пристрій для запису інформації на носій запису і пристрій для читання носія запису
Номер патенту: 34410
Опубліковано: 15.03.2001
Автори: Кейперс Франціскус Ламбертус Йоханнус Марі, Раймакерс Вільхельмус Петрус Марія
Текст
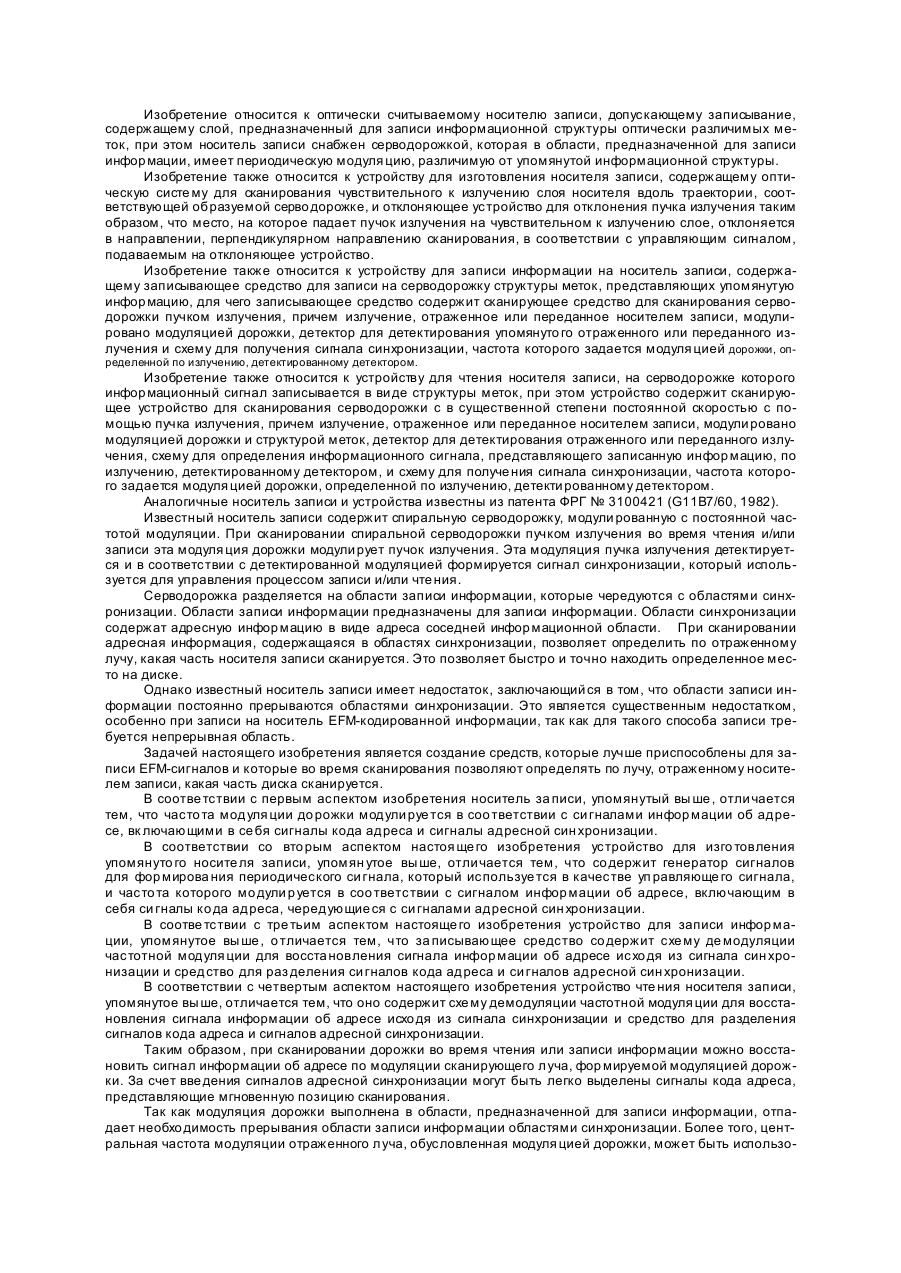
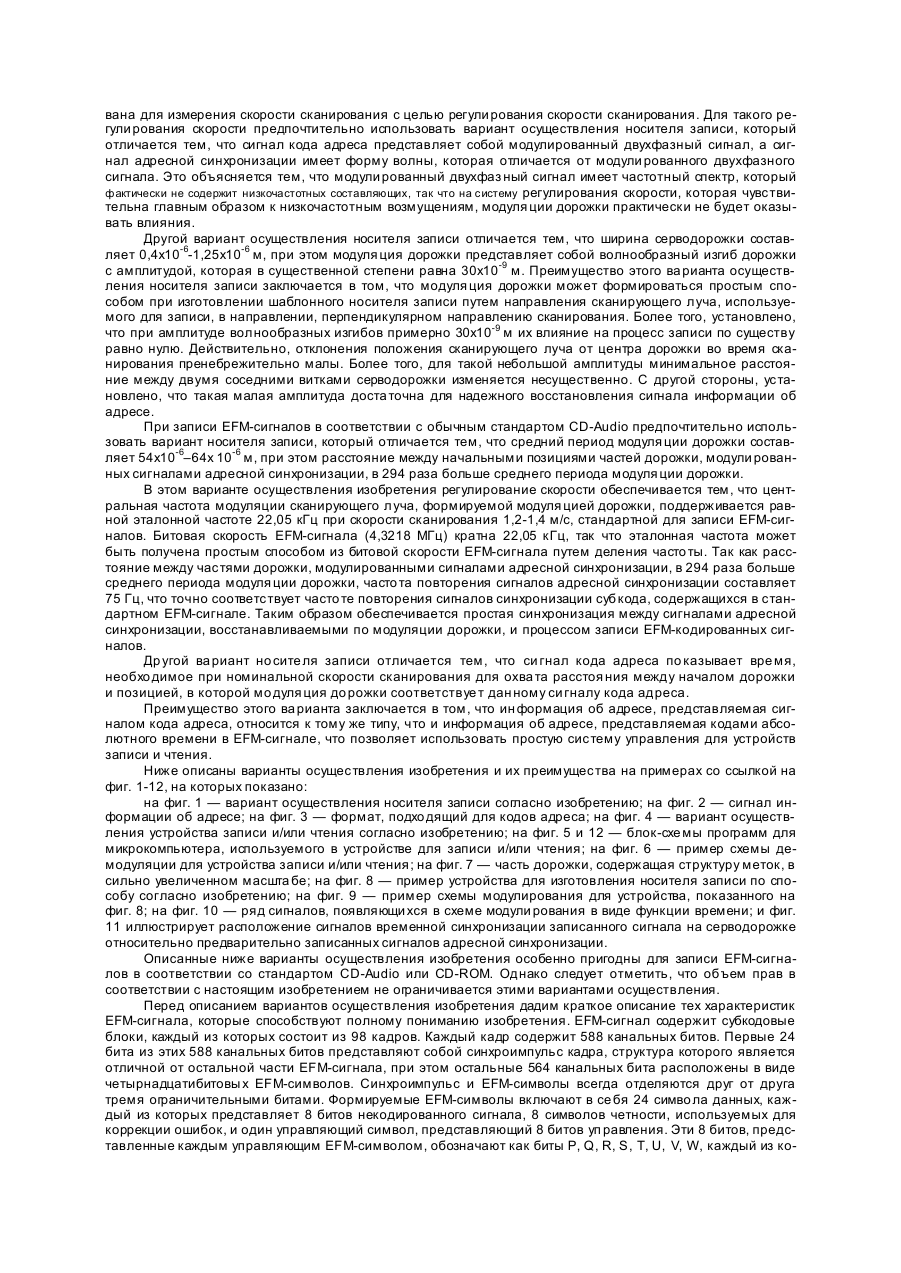
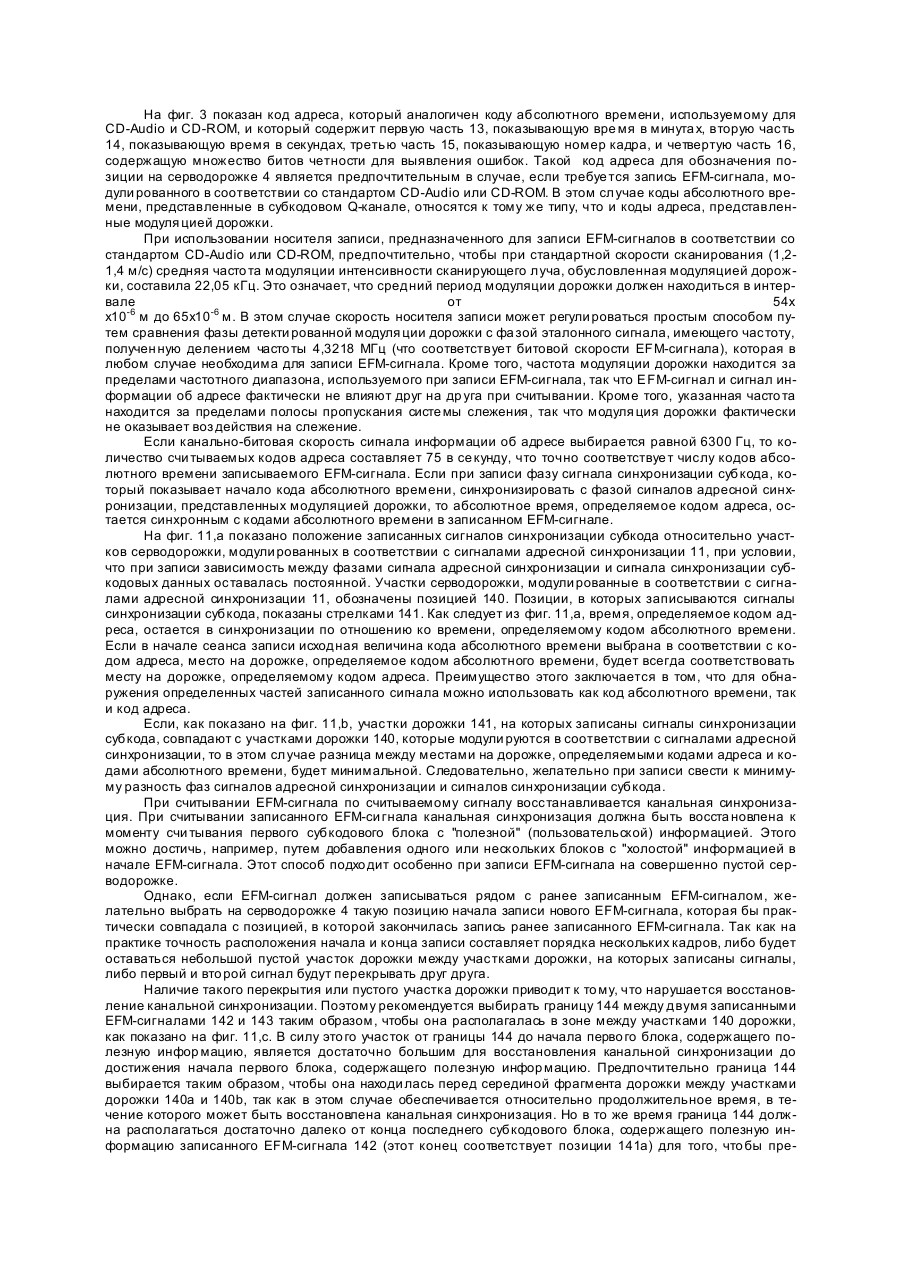
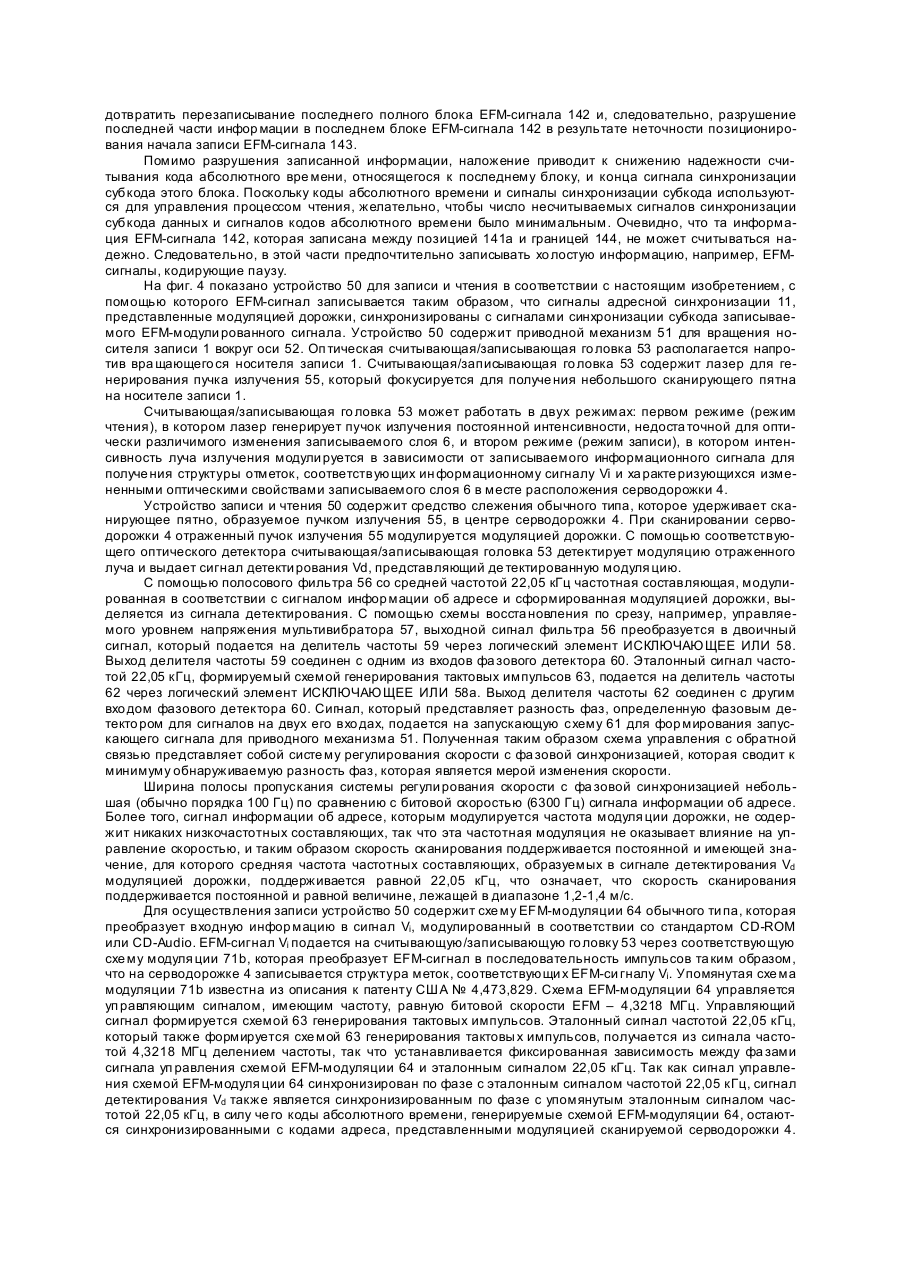
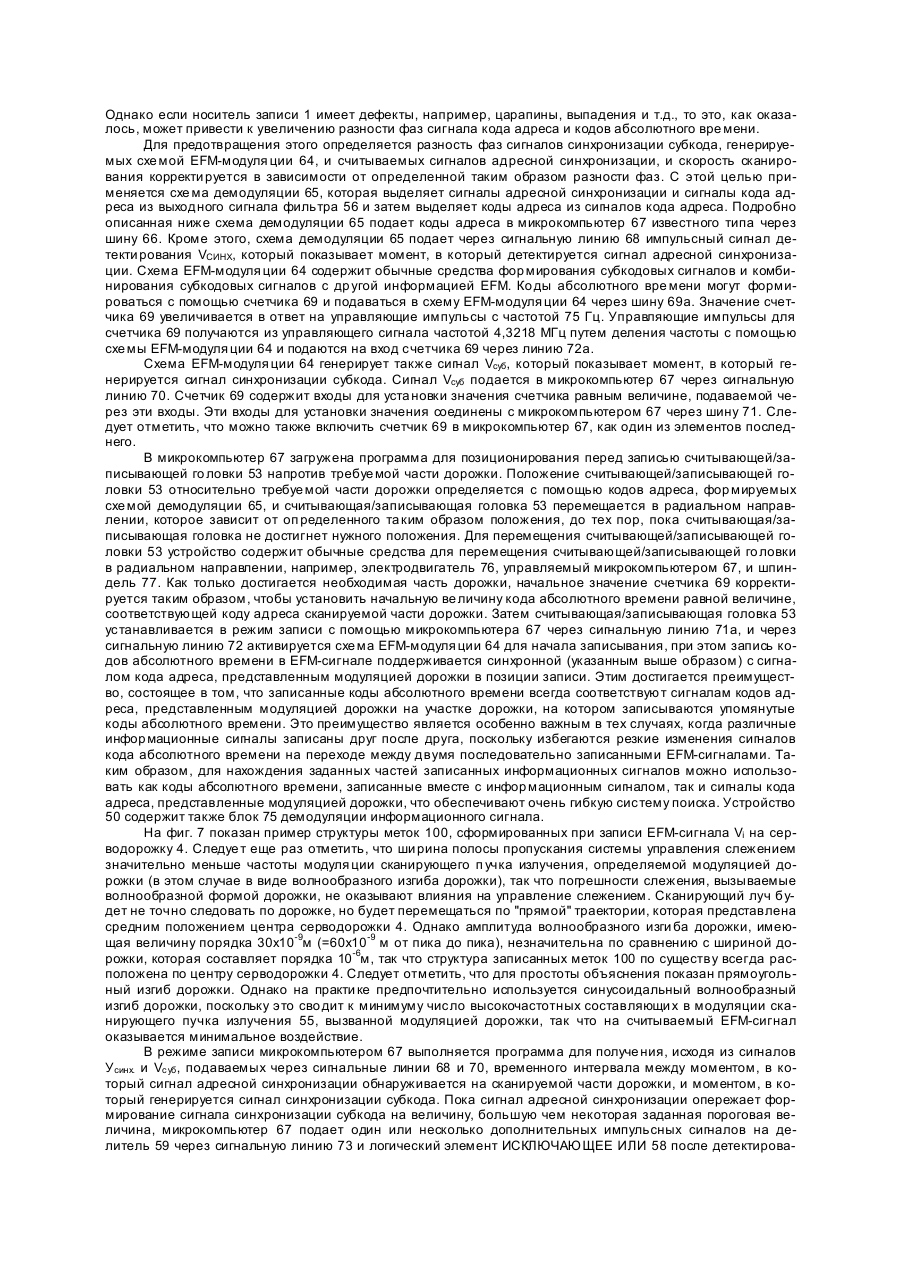
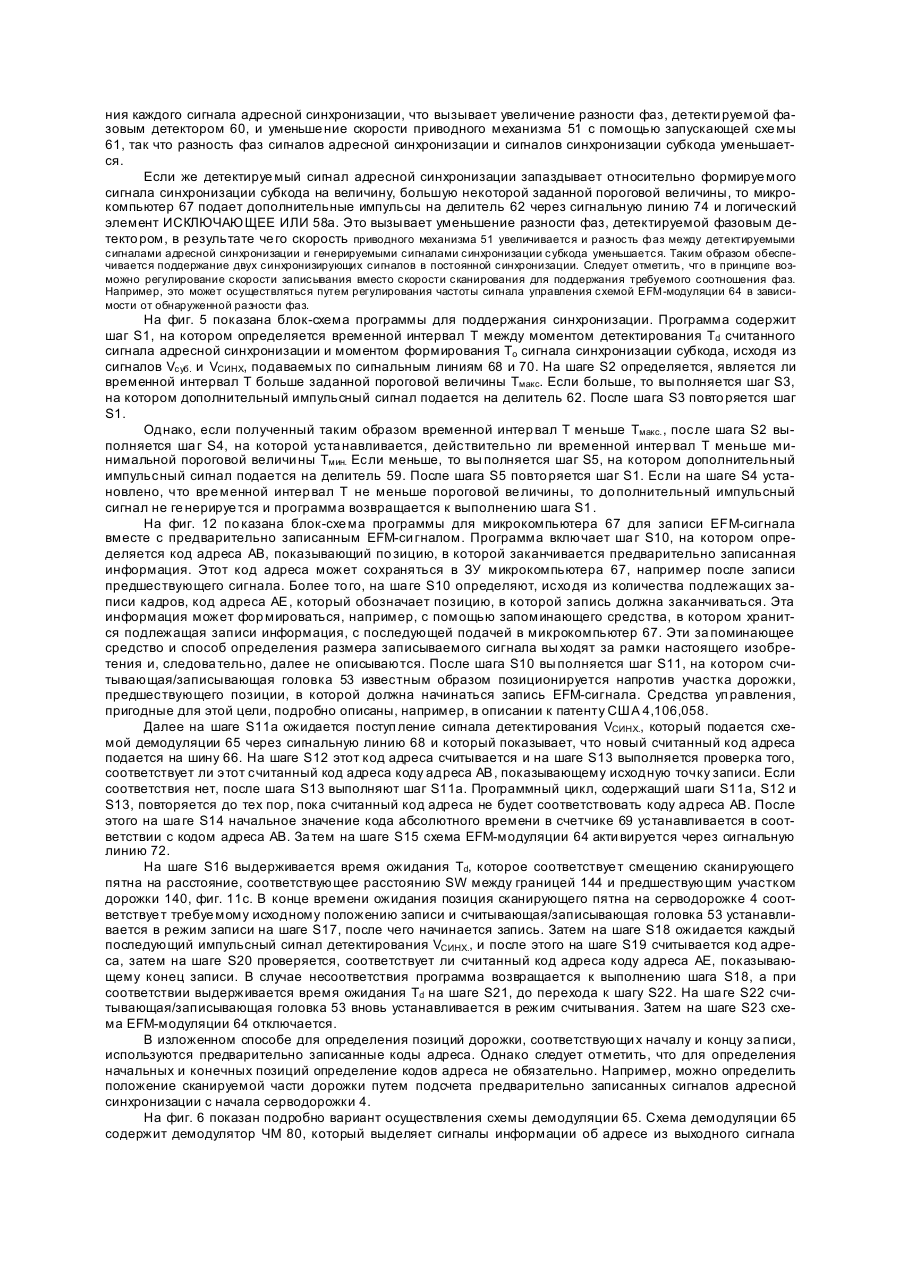
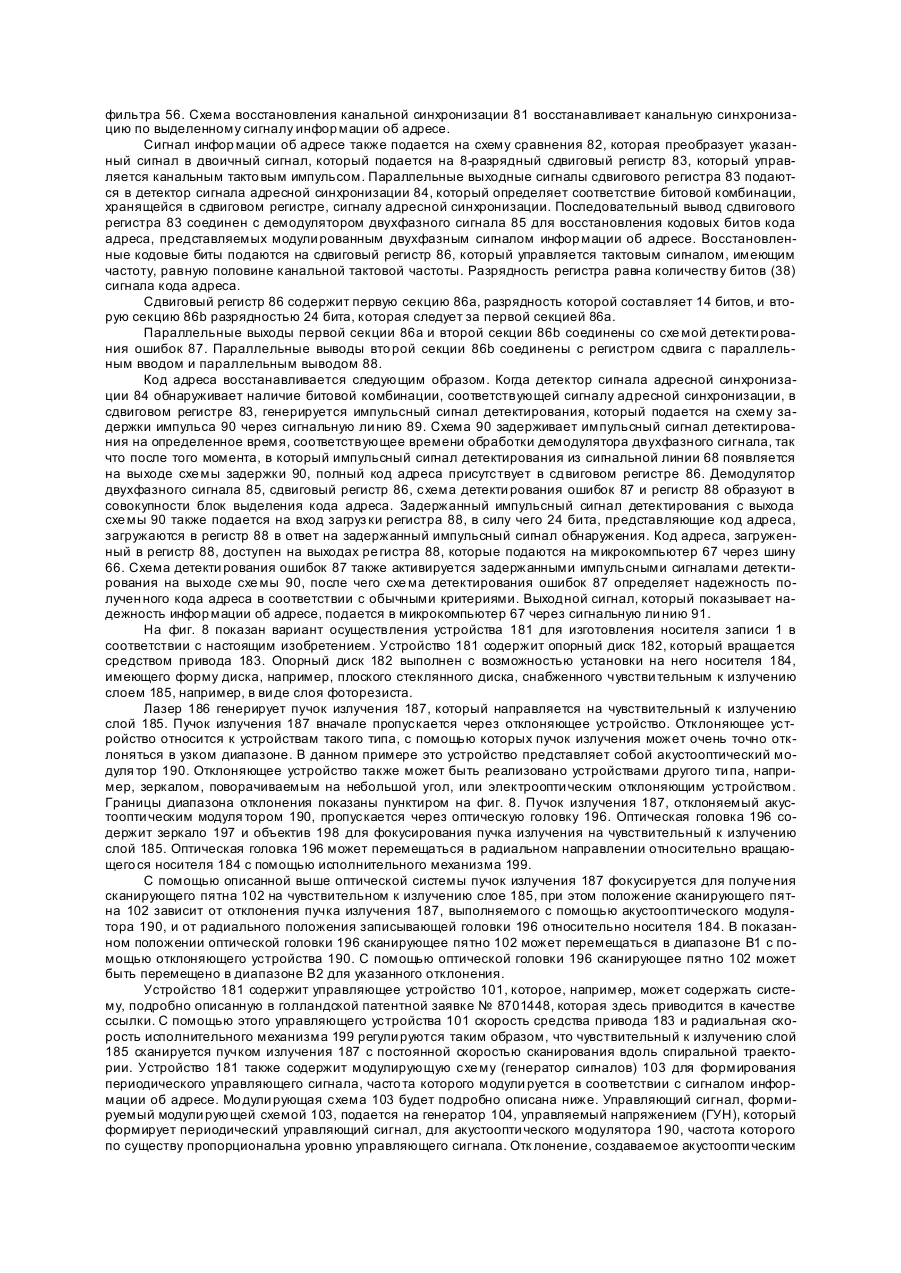
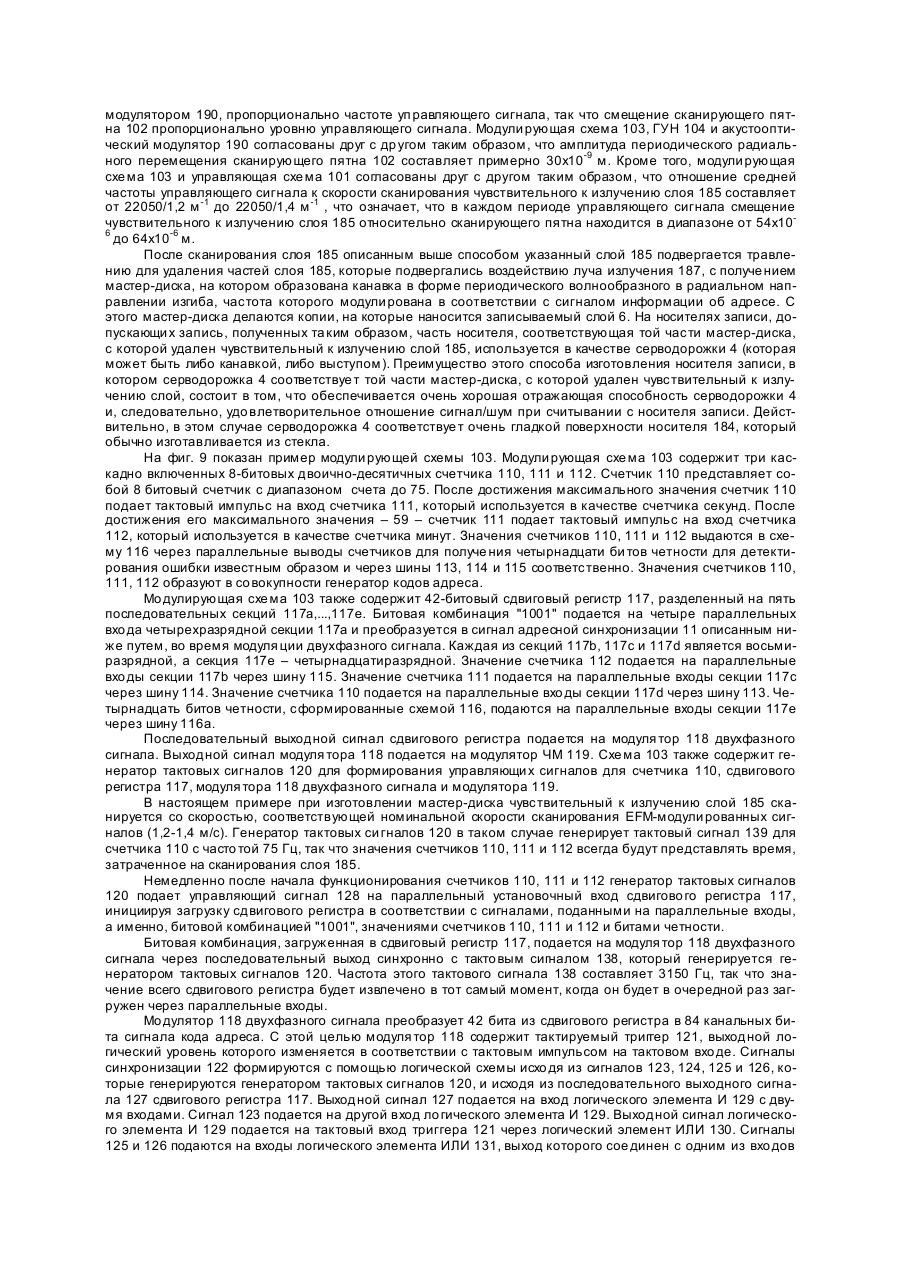
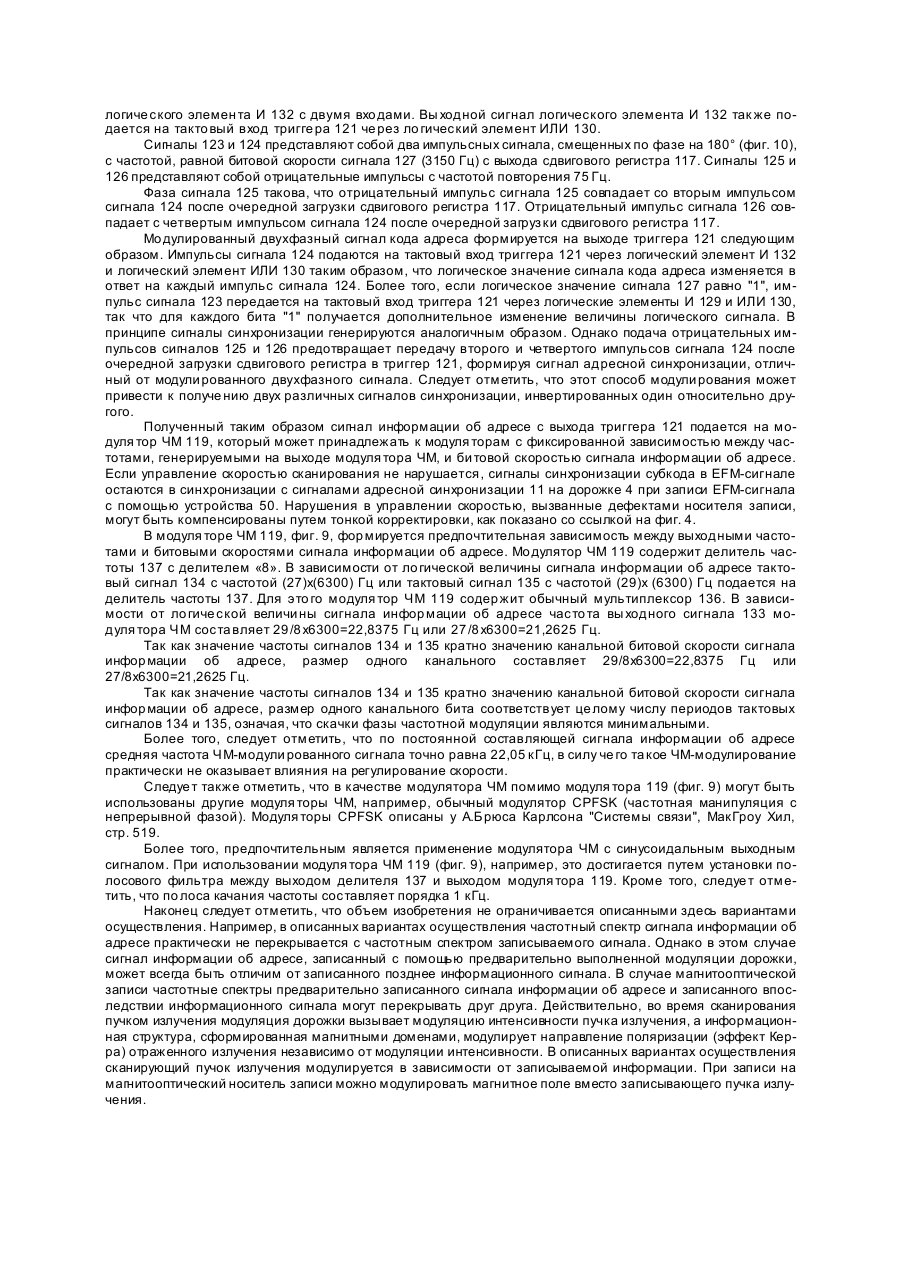
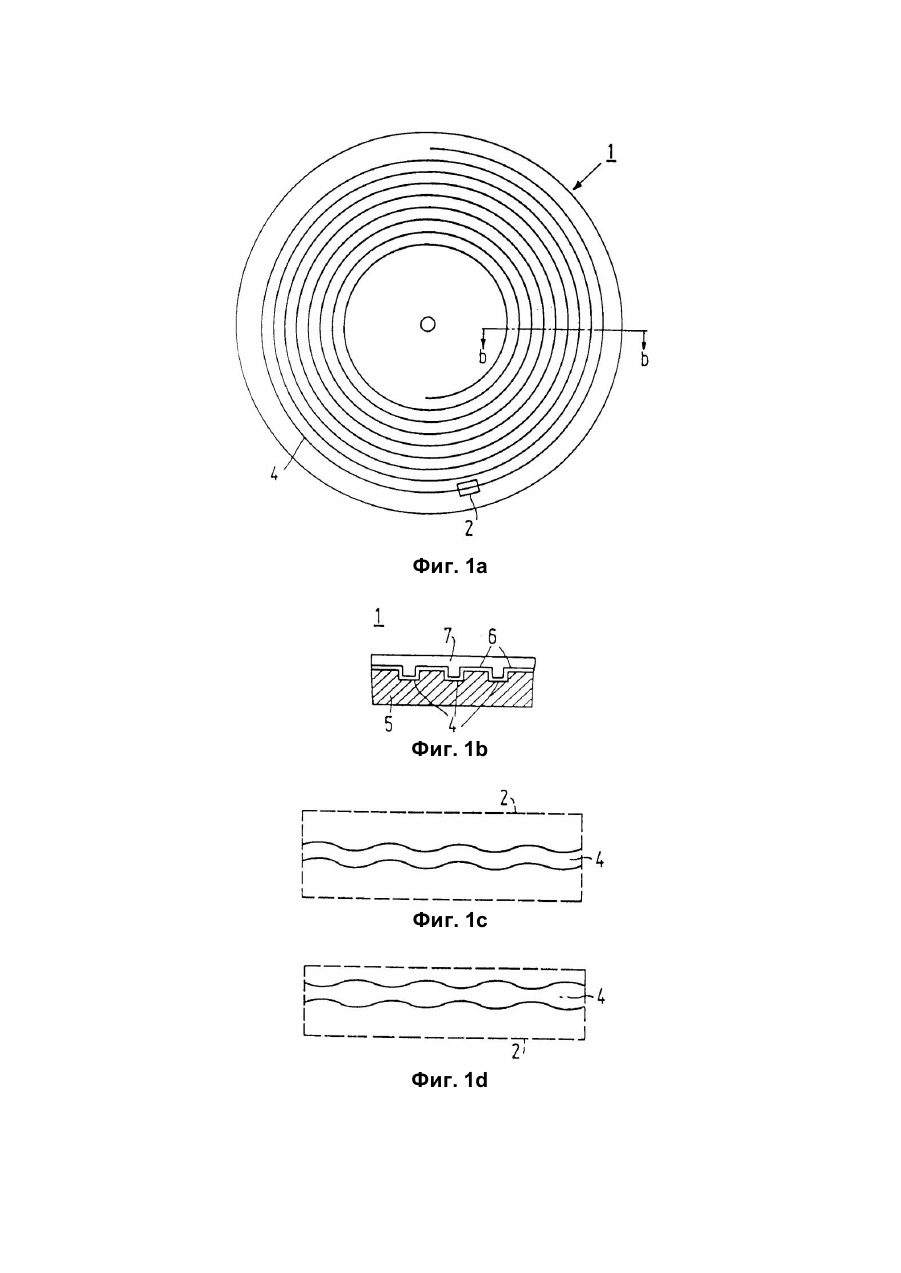
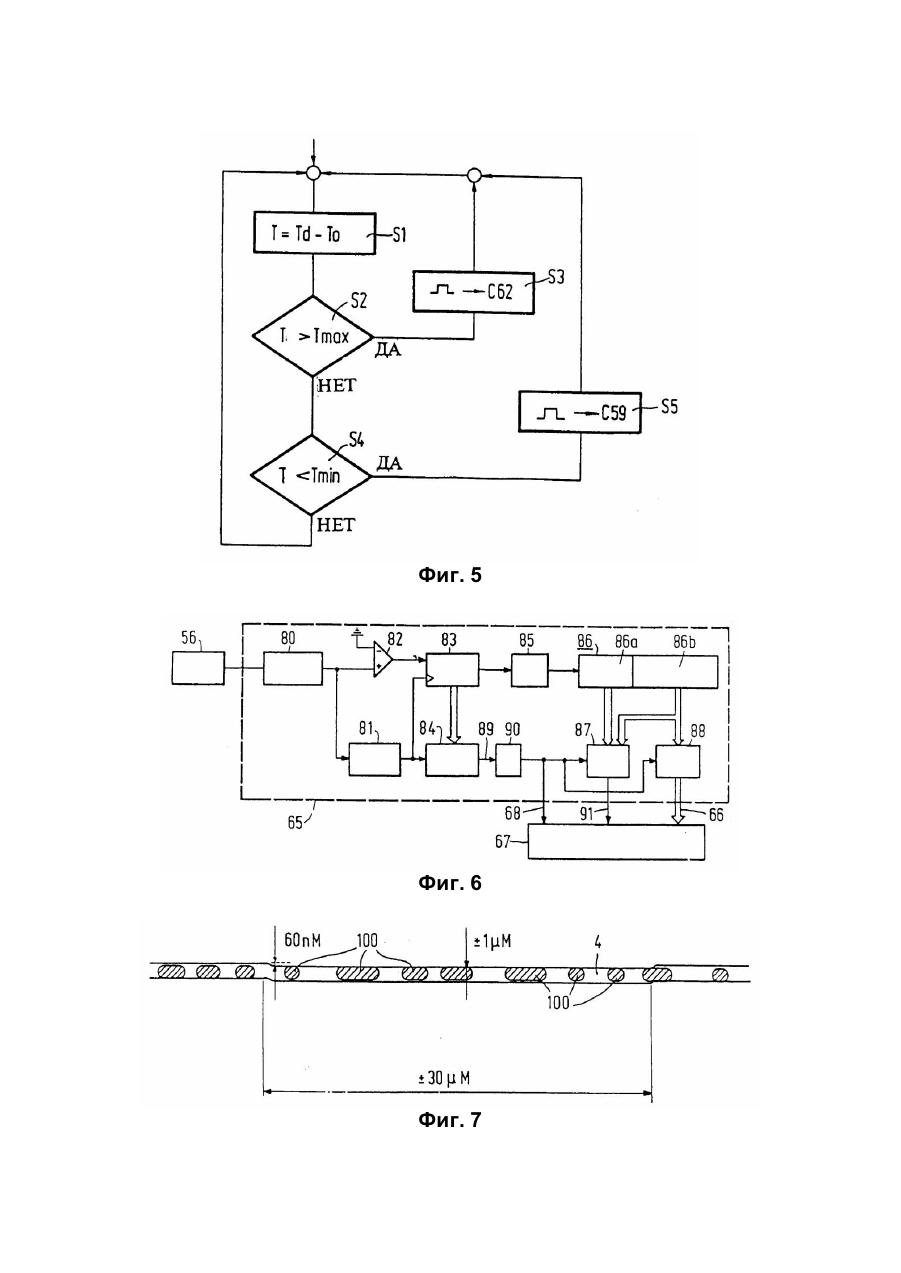
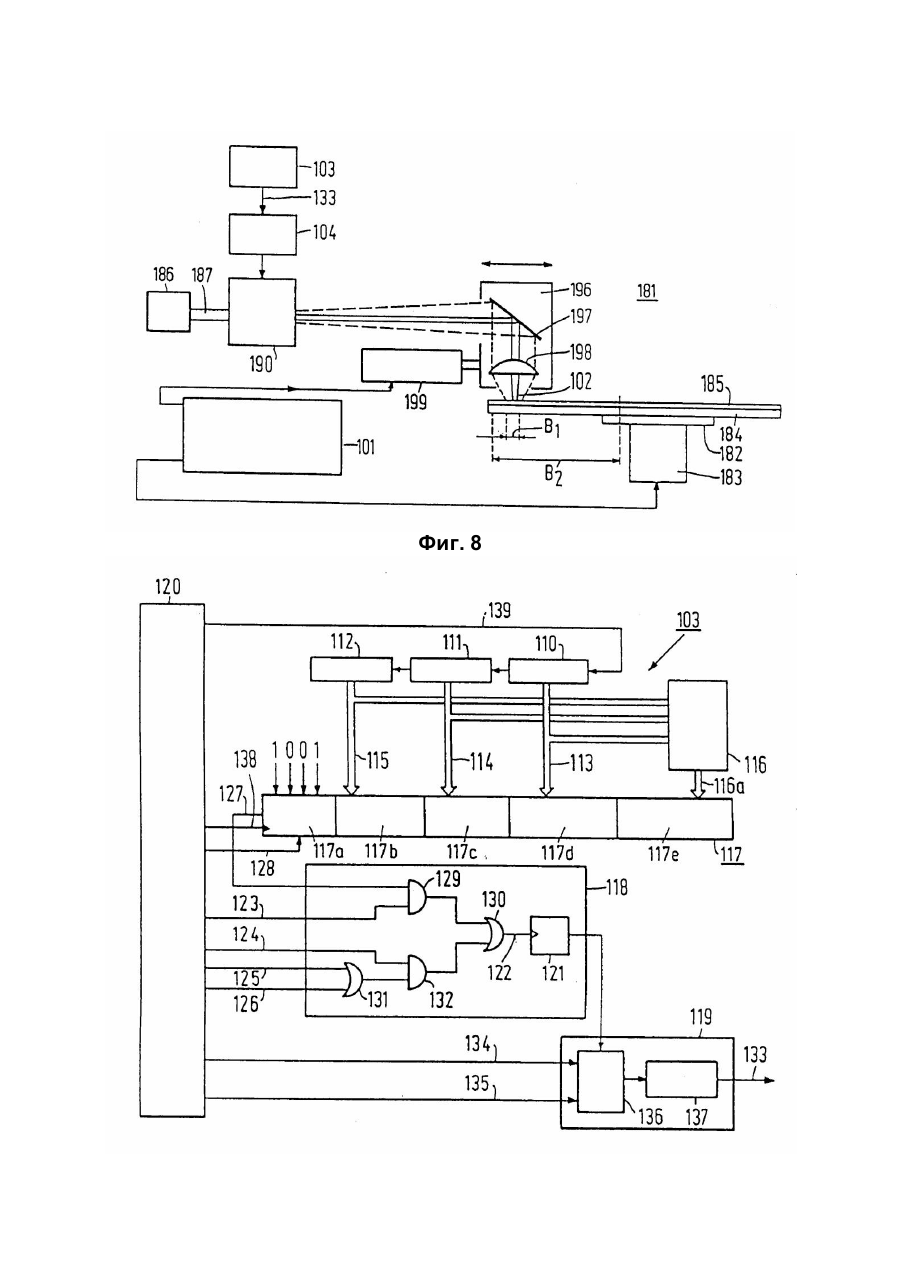
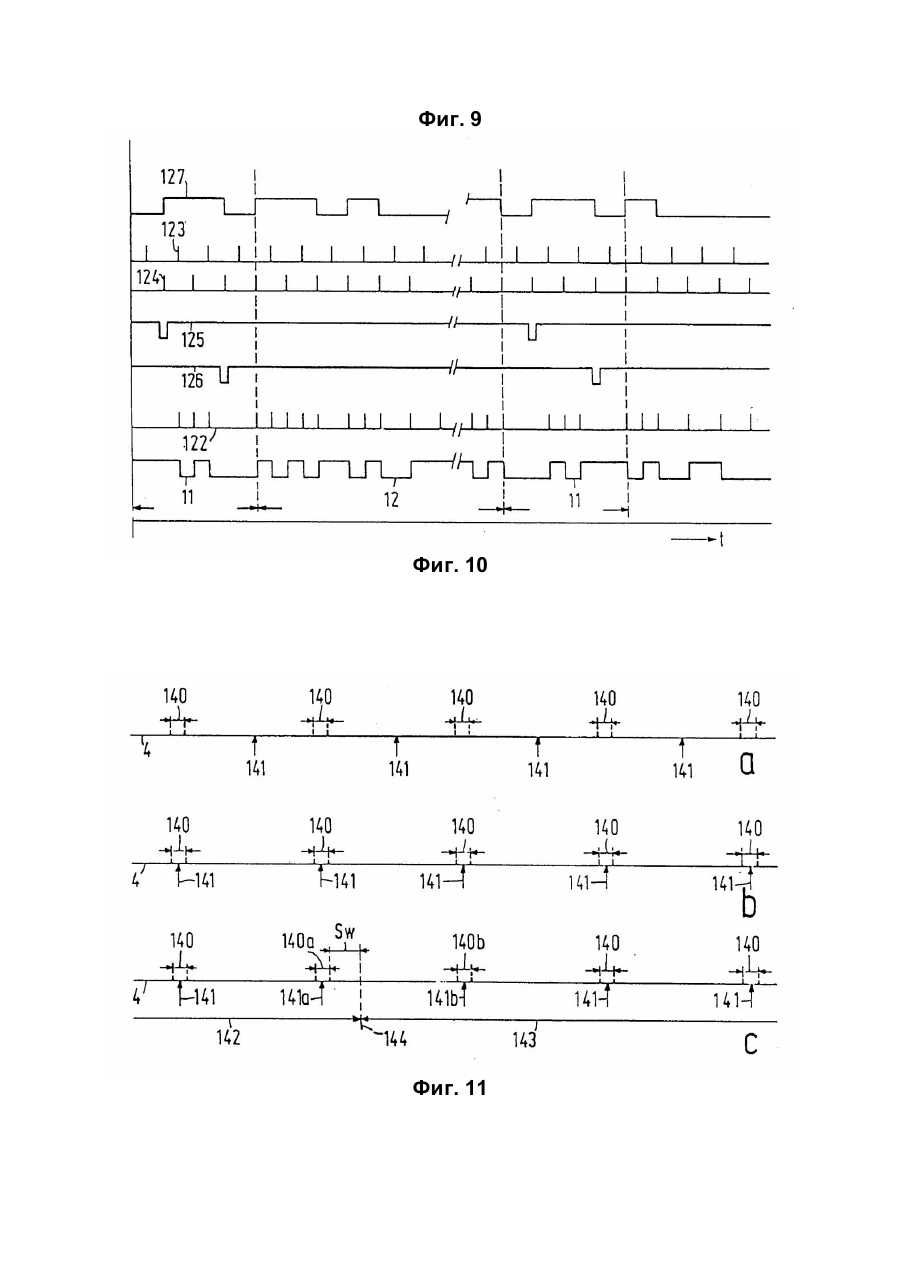
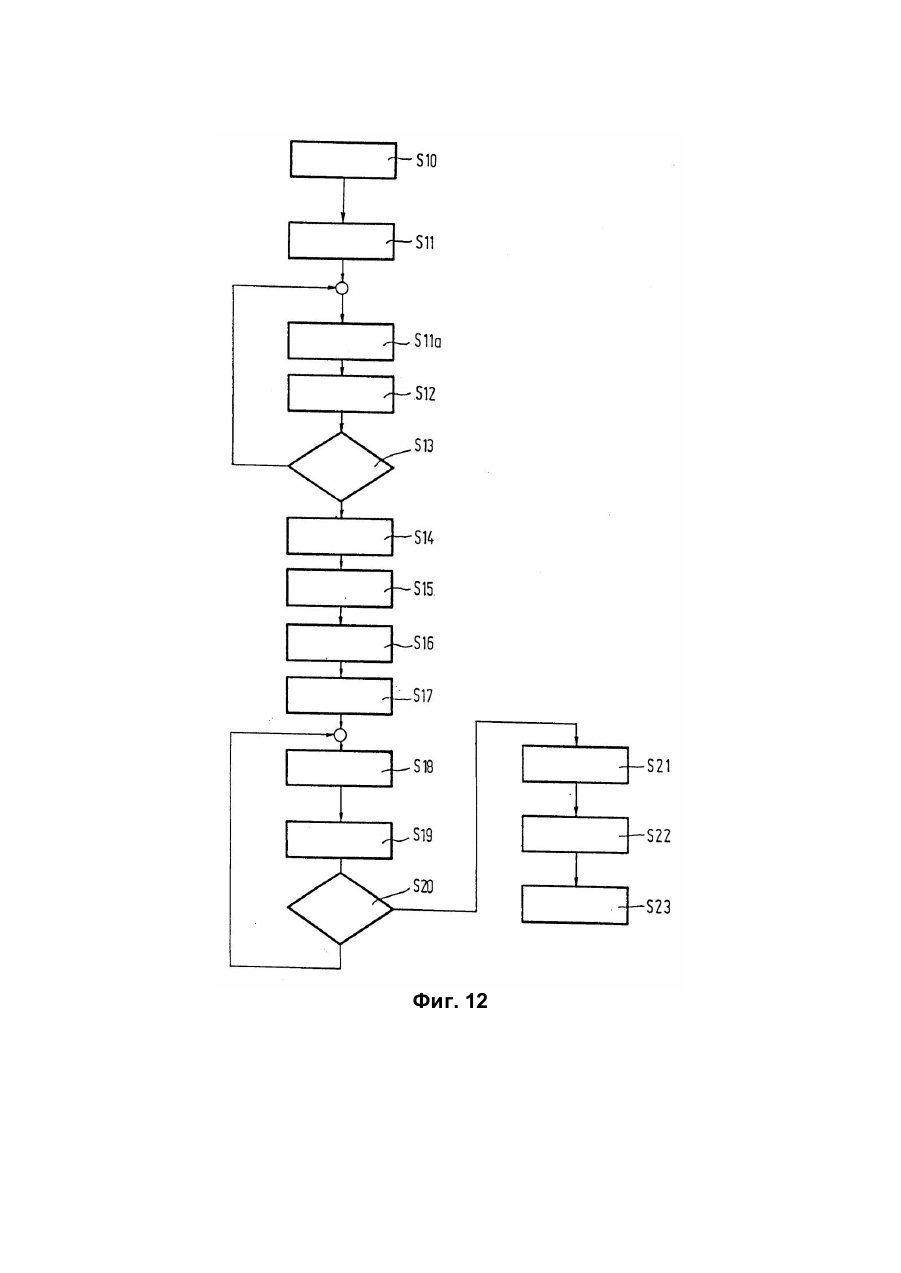
Изобретение относится к оптически считываемому носителю записи, допускающему записывание, содержащему слой, предназначенный для записи информационной структуры оптически различимых меток, при этом носитель записи снабжен серводорожкой, которая в области, предназначенной для записи инфор мации, имеет периодическую модуля цию, различимую от упомянутой информационной структуры. Изобретение также относится к устройству для изготовления носителя записи, содержащему оптическую систе му для сканирования чувствительного к излучению слоя носителя вдоль траектории, соответствующей образуемой серво дорожке, и отклоняющее устройство для отклонения пучка излучения таким образом, что место, на которое падает пучок излучения на чувствительном к излучению слое, отклоняется в направлении, перпендикулярном направлению сканирования, в соответствии с управляющим сигналом, подаваемым на отклоняющее устройство. Изобретение также относится к устройству для записи информации на носитель записи, содержащему записывающее средство для записи на серводорожку структуры меток, представляющих упомянутую инфор мацию, для чего записывающее средство содержит сканирующее средство для сканирования серводорожки пучком излучения, причем излучение, отраженное или переданное носителем записи, модулировано модуляцией дорожки, детектор для детектирования упомянуто го отраженного или переданного излучения и схему для получения сигнала синхронизации, частота которого задается модуля цией дорожки, определенной по излучению, детектированному детектором. Изобретение также относится к устройству для чтения носителя записи, на серводорожке которого инфор мационный сигнал записывается в ви де структуры меток, при этом устройство содержит сканирующее устройство для сканирования серводорожки с в существенной степени постоянной скоростью с помощью пучка излучения, причем излучение, отраженное или переданное носителем записи, модули ровано модуляцией дорожки и структурой меток, детектор для детектирования отраженного или переданного излучения, схему для определения информационного сигнала, представляющего записанную инфор мацию, по излучению, детектированному детектором, и схему для получе ния сигнала синхронизации, частота которого задается модуля цией дорожки, определенной по излучению, детекти рованному детектором. Аналогичные носитель записи и устройства известны из патента ФРГ № 3100421 (G11B7/60, 1982). Известный носитель записи содержит спиральную серводорожку, модули рованную с постоянной частотой модуляции. При сканировании спиральной серводорожки пучком излучения во время чтения и/или записи эта модуля ция дорожки модули рует пучок излучения. Эта модуляция пучка излучения детектируется и в соответствии с детектированной модуляцией формируется сигнал синхронизации, который используется для управления процессом записи и/или чте ния. Серводорожка разделяется на области записи информации, которые чередуются с областями синхронизации. Области записи информации предназначены для записи информации. Области синхронизации содержат адресную инфор мацию в виде адреса соседней инфор мационной области. При сканировании адресная информация, содержащаяся в областях синхронизации, позволяет определить по отраженному лучу, какая часть носителя записи сканируется. Это позволяет быстро и точно находить определенное место на диске. Однако известный носитель записи имеет недостаток, заключающий ся в том, что области записи информации постоянно прерываются областями синхронизации. Это является существенным недостатком, особенно при записи на носитель EFM-кодированной информации, так как для такого способа записи требуется непрерывная область. Задачей настоящего изобретения является создание средств, которые лучше приспособлены для записи EFM-сигналов и которые во время сканирования позволяют определять по лучу, отраженному носителем записи, какая часть диска сканируется. В соотве тствии с первым аспектом изобретения носитель за писи, упомянутый вы ше , отличается тем, что часто та модуля ции до рожки модули руе тся в соо тветствии с си гналами инфор мации об адресе, вк лючающими в се бя сигналы кода адреса и сигналы адресной син хронизации. В соответствии со вто рым аспектом настоя ще го изобретения устройство для изго товления упомянуто го носите ля записи, упомян утое вы ше, отличается тем, что со держит генератор сигналов для фор мирова ния периодического си гнала, который используе тся в качестве уп равляюще го сигнала, и часто та которого мо дули р уется в соо тветствии с сигналом инфор мации об адресе, включающим в себя си гналы ко да адреса, чередующие ся с си гналами адресной син хронизации. В соотве тствии с тре тьим аспектом настояще го изобретения устройство для записи инфор мации, упомянутое вы ше , о тличается тем, что за писывающее средство со держит схе му де модуляции частотной модуля ции для восста новления сигнала инфор мации об адресе исхо дя из сигнала син хронизации и средство для раз деления си гналов кода адреса и си гналов адресной син хронизации. В соответствии с четвертым аспектом настоящего изобретения устройство чте ния носителя записи, упомянутое вы ше, отличается тем, что оно содержит схе му демодуляции частотной модуля ции для восстановления сигнала информации об адресе исхо дя из сигнала синхронизации и средство для разделения сигналов кода адреса и сигналов адресной синхронизации. Таким образом, при сканировании дорожки во время чтения или записи информации можно восстановить сигнал информации об адресе по модуляции сканирующего луча, фор мируемой модуляцией дорожки. За счет вве дения сигналов адресной синхронизации могут быть легко выделены сигналы кода адреса, представляющие мгновенную позицию сканирования. Так как модуляция дорожки выполнена в области, предназначенной для записи информации, отпадает необхо димость прерывания области записи информации областями синхронизации. Более того, центральная частота модуляции отраженного луча, обусловленная модуля цией дорожки, может быть использо вана для измерения скорости сканирования с целью регули рования скорости сканирования. Для такого регули рования скорости предпочтительно использовать вариант осуществления носителя записи, который отличается тем, что сигнал кода адреса представляет собой модулированный двухфазный сигнал, а сигнал адресной синхронизации имеет форму волны, которая отличается от модули рованного двухфазного сигнала. Это объясняется тем, что модули рованный двухфаз ный сигнал имеет частотный спектр, который фактически не содержит низкочастотных составляющих, так что на систему регулирования скорости, которая чувствительна главным образом к низкочастотным возмущениям, модуля ции дорожки практически не будет оказывать влияния. Другой вариант осуществления носителя записи отличается тем, что ширина серводорожки составляет 0,4х10-6-1,25х10-6 м, при этом модуля ция дорожки представляет собой волнообразный изгиб дорожки с амплитудой, которая в существенной степени равна 30х10-9 м. Преимущество этого ва рианта осуществления носителя записи заключается в том, что модуля ция дорожки может формироваться простым способом при изготовлении шаблонного носителя записи путем направления сканирующего луча, используемого для записи, в направлении, перпендикулярном направлению сканирования. Более того, установлено, что при амплитуде волнообразных изгибов примерно 30х10-9 м их влияние на процесс записи по существу равно нулю. Действительно, отклонения положения сканирующего луча от центра дорожки во время сканирования пренебрежительно малы. Более того, для такой небольшой амплитуды минимальное расстояние между двумя соседними витками серводорожки изменяется несущественно. С другой стороны, установлено, что такая малая амплитуда доста точна для надежного восстановления сигнала информации об адресе. При записи EFM-сигналов в соответствии с обычным стандартом CD-Audio предпочтительно использовать вариант носителя записи, который отличается тем, что средний период модуля ции дорожки составляет 54х10-6–64х 10-6 м, при этом расстояние между начальными позициями частей дорожки, модули рованных сигналами адресной синхронизации, в 294 раза больше среднего периода модуля ции дорожки. В этом варианте осуществления изобретения регулирование скорости обеспечивается тем, что центральная частота модуляции сканирующего луча, формируемой модуля цией дорожки, поддерживается равной эталонной частоте 22,05 кГц при скорости сканирования 1,2-1,4 м/с, стандартной для записи EFM-сигналов. Битовая скорость EFM-сигнала (4,3218 МГц) кратна 22,05 кГц, так что эталонная частота может быть получена простым способом из битовой скорости EFM-сигнала путем деления часто ты. Так как расстояние между частями дорожки, модулированными сигналами адресной синхронизации, в 294 раза больше среднего периода модуля ции дорожки, часто та повторения сигналов адресной синхронизации составляет 75 Гц, что точно соответствует часто те повторения сигналов синхронизации субкода, содержащихся в стандартном EFM-сигнале. Таким образом обеспечивается простая синхронизация между сигналами адресной синхронизации, восстанавливаемыми по модуляции дорожки, и процессом записи EFM-кодированных сигналов. Др угой ва риант но сите ля записи отличается тем, что си гнал кода адреса по казывает вре мя, необхо димое при номинальной скорости сканирования для охва та расстоя ния между началом дорожки и позицией, в которой мо дуля ция до рожки соответствуе т дан ному си гналу кода адреса. Преимущество этого ва рианта заключается в том, что ин формация об адресе, представляемая сигналом кода адреса, относится к тому же типу, что и информация об адресе, представляемая кодами абсолютного времени в EFM-сигнале, что позволяет использовать простую систему управления для устройств записи и чтения. Ниже описаны варианты осуществления изобретения и их преимущества на примерах со ссылкой на фиг. 1-12, на которых показано: на фиг. 1 — вариант осуществления носителя записи согласно изобретению; на фиг. 2 — сигнал информации об адресе; на фиг. 3 — формат, подхо дящий для кодов адреса; на фиг. 4 — вариант осуществления устройства записи и/или чтения согласно изобретению; на фиг. 5 и 12 — блок-схе мы программ для микрокомпьютера, используемого в устройстве для записи и/или чтения; на фиг. 6 — пример схемы демодуляции для устройства записи и/или чтения; на фиг. 7 — часть дорожки, содержащая структуру меток, в сильно увеличенном масшта бе; на фиг. 8 — пример устройства для изготовления носителя записи по способу согласно изобретению; на фиг. 9 — пример схемы модулирования для устройства, показанного на фиг. 8; на фиг. 10 — ряд сигналов, появляющи хся в схеме модули рования в виде функции времени; и фиг. 11 иллюстрирует расположение сигналов временной синхронизации записанного сигнала на серводорожке относительно предварительно записанных сигналов адресной синхронизации. Описанные ниже варианты осуществления изобретения особенно пригодны для записи EFM-сигналов в соответствии со стандартом CD-Audio или CD-ROM. Однако следует отметить, что объем прав в соответствии с настоящим изобретением не ограничивается этими вариантами осуществления. Перед описанием вариантов осуществления изобретения дадим краткое описание тех характеристик EFM-сигнала, которые способствуют полному пониманию изобретения. EFM-сигнал содержит субкодовые блоки, каждый из которых состоит из 98 кадров. Каждый кадр содержит 588 канальных битов. Первые 24 бита из этих 588 канальных битов представляют собой синхроимпульс кадра, структура которого является отличной от остальной части EFM-сигнала, при этом остальные 564 канальных бита расположены в виде четырнадцатибитовы х EFM-символов. Синхроимпульс и EFM-символы всегда отделяются друг от друга тремя ограничительными битами. Формируемые EFM-символы включают в се бя 24 симво ла данных, каждый из которых представляет 8 битов некодированного сигнала, 8 символов четности, используемых для коррекции ошибок, и один управляющий символ, представляющий 8 битов уп равления. Эти 8 битов, представленные каждым управляющим EFM-символом, обозначают как биты Р, Q, R, S, Т, U, V, W, каждый из ко торых имеет фиксированную битовую позицию. 16 битов управляющих EFM-символов в первых двух кадрах каждого блока образуют сигнал синхронизации блока, показывающий начало блока. Остальные 96 битов Q из 96 кадров образуют субкодовый Q-канал. Из этих битов 24 бита используются для обозначения кода абсолютного времени. Этот код абсолютного времени показывает время, которое уже прошло с начала EFM-сигнала. Это время выражается в минута х (8 би тов), секундах (8 би тов) и кадрах (8 битов). Далее следует отметить, что код EFM-сигнала не содержит постоянной составляющей, то есть частотный спектр EFM-сигнала фактически не включает частотных составляющи х в частотном диапазоне менее 100 кГц. На фиг. 1 показаны варианты осуществления носителя записи, где фиг. 1,а – вид сверху, фиг. 1,b – небольшая часть в разрезе b-b и фиг. 1,c,d – виды сверху, показывающие участок 2 первого и второго вариантов осуществления носителя записи 1 в значительно увеличенном масшта бе. Носитель записи 1 содержит серводорожку 4, которая образована, например, предварительно выполненной канавкой или выступом. Серводорожка 4 предназначена для записи информационного сигнала. Для осуществления записи носитель записи 1 содержит записываемый слой 6, который нанесен на прозрачную подложку 5 и покрыт защитным слоем 7. Записываемый слой 6 изготавливается из материала, который при воздействии соответствующего излучения подвергается оптически различимым изменениям. Таким слоем, например, может быть тонкий слой металла типа теллура. За счет воздействия лазерного излучения достаточно высокой интенсивности этот металлический слой может подвергаться локальному расплавлению таким образом, что в этом месте этот слой дает отличный коэффициент отражения. При сканировании серводорожки 4 пучком излучения, интенсивность которого модулируется в соответствии с записываемой инфор мацией, формируется информационная структура опти чески различимых меток, которая представляет упомянутую инфор мацию. В альтернативном варианте слой 6 может состоять из различных чувствительных к излучению материалов, например, магнитно-оптических материалов или материалов, которые при нагреве испытывают структур ные изменения, например, перехо дят из аморфного в кристаллическое состояние, и наоборот. Исследование таких материалов представлено в книге "Принципы оптических дисковых систем", Адам Хилгар Лтд, Бристол и Бостон, стр. 210-227. С помощью серво дорожки 4 пучок излучения, направленный на носитель записи 1 для записи упомянутой информации, может точно совмещать ся с серводорожкой 4, т.е. положение места падения пучка излучения в радиальном направлении может регули роваться с помощью сервосистемы, использующей излучение, отраженное от носителя записи 1. Измерительная система для измерения радиального положения сканирующего пятна на носителе записи может соответствовать одной из систем, описанных в упомянутой книге «Принципы оптических дисковых систем». Для определения с помощью предварительно выполненной модуля ции дорожки позиции сканируемой части дорожки относительно начала серводорожки записывают сигнал информации об адресе, предпочти тельно в виде синусоидального волнообразного изги ба дорожки, фиг. 1,с. Однако также могут быть использованы и другие способы модуля ции дорожки, например, модуля ция по ширине дорожки, фиг. 1,d. Так как модуля ция дорожки в виде синусоидального волнообразного изгиба легко реализуется при изготовлении носителя записи, предпочтение отдается именно такой модуляции дорожки. Следуе т отметить, что на фиг. 1 модуляция дорожки представлена в сильно увеличенном виде. В действительности было установлено, что волнообразный изгиб дорожки с амплитудой примерно 30х10-9м при ширине дорожки примерно 10-6 м достаточен для устойчивого детектирования модуляции сканирующего луча. Преимущество небольшой амплитуды волнообразного изгиба дорожки заключается в том, что расстояние между соседними витками серводорожки может быть небольшим. Предпочти тельной является такая модуляция дорожки, при которой частота модуля ции дорожки модули руется в соответствии с сигналом информации об адресе. На фиг. 2 показан пример сигнала информации об адресе, который содержит сигналы кода адреса 12, которые чередуются с сигналами адресной синхронизации 11. Каждый сигнал кода адреса 12 может содержать модули рованный двухфазный сигнал размером в 76 канальных битов, которые образуют код адреса из 38 кодовых битов. В модулированном двухфазном сигнале каждый кодовый бит представлен двумя последовательными канальными битами. Каждый кодовый бит первого логического значения, в настоящем примере "0", представлен двумя канальными битами одинакового логического значения. Другое логическое значение ("1") представлено двумя канальными битами различного логического значения. Более того, логическое значение модули рованного двухфазного сигнала меняется после каждой пары канальных битов (см. фиг. 2), так что максимальное число последовательных кодовых битов одинакового логического значения не превышает двух. Сигналы адресной синхронизации 11 выбираются таким образом, чтобы они были отличимыми от сигналов кода адреса. Это дости гается путем выбора максимального числа последовательных битов одинакового логического значения в сигналах адресной синхронизации равным трем. Сигнал информации об адресе, показанный на фиг. 2, имеет частотный спектр, который по существу не содержит низкочастотных составляющих. Преимущество этого объясняется ниже. Как указано выше, сигнал информации об адресе содержит 38-битовый код адреса. Этот код адреса может содержать временной код, показывающий время, необхо димое для преодоления расстояния от начала дорожки до позиции, в которой располагается сигнал информации об адресе, при сканирования с номинальной скоростью сканирования. Например, такой код адреса может содержать несколько последовательных байтов, как, например, при использовании для записи EFM-кодированной информации на дисках CD-Audio и CD-ROM. На фиг. 3 показан код адреса, который аналогичен коду абсолютного времени, используемому для CD-Audio и CD-ROM, и который содержит первую часть 13, показывающую вре мя в минута х, вторую часть 14, показывающую время в секундах, третью часть 15, показывающую номер кадра, и четвертую часть 16, содержащую множество битов четности для выявления ошибок. Такой код адреса для обозначения позиции на серводорожке 4 является предпочтительным в случае, если требуе тся запись EFM-сигнала, модули рованного в соответствии со стандартом CD-Audio или CD-ROM. В этом случае коды абсолютного времени, представленные в субкодовом Q-канале, относятся к тому же типу, что и коды адреса, представленные модуля цией дорожки. При использовании носителя записи, предназначенного для записи EFM-сигналов в соответствии со стандартом CD-Audio или CD-ROM, предпочтительно, чтобы при стандартной скорости сканирования (1,21,4 м/с) средняя часто та модуляции интенсивности сканирующего луча, обусловленная модуляцией дорожки, составила 22,05 кГц. Это означает, что средний период модуляции дорожки должен находиться в интервале от 54x х10-6 м до 65x10-6 м. В этом случае скорость носителя записи может регули роваться простым способом путем сравнения фазы детекти рованной модуля ции дорожки с фа зой эталонного сигнала, имеющего частоту, получен ную делением часто ты 4,3218 МГц (что соответствует битовой скорости EFM-сигнала), которая в любом случае необходима для записи EFM-сигнала. Кроме того, частота модуляции дорожки находится за пределами частотного диапазона, используемого при записи EFM-сигнала, так что EFM-сигнал и сигнал информации об адресе фактически не влияют друг на др уга при считывании. Кроме того, указанная часто та находится за пределами полосы пропускания систе мы слежения, так что модуля ция дорожки фактически не оказывает воз действия на слежение. Если канально-битовая скорость сигнала информации об адресе выбирается равной 6300 Гц, то количество счи тываемых кодов адреса составляет 75 в се кунду, что точно соответствуе т числу кодов абсолютного времени записываемого EFM-сигнала. Если при записи фазу сигнала синхронизации субкода, который показывает начало кода абсолютного времени, синхронизировать с фазой сигналов адресной синхронизации, представленных модуляцией дорожки, то абсолютное время, определяемое кодом адреса, остается синхронным с кодами абсолютного времени в записанном EFM-сигнале. На фиг. 11,а показано положение записанных сигналов синхронизации субкода относительно участков серводорожки, модули рованных в соответствии с сигналами адресной синхронизации 11, при условии, что при записи зависимость между фазами сигнала адресной синхронизации и сигнала синхронизации субкодовых данных оставалась постоянной. Участки серводорожки, модули рованные в соответствии с сигналами адресной синхронизации 11, обозначены позицией 140. Позиции, в которых записываются сигналы синхронизации субкода, показаны стрелками 141. Как следует из фиг. 11,а, время, определяемое кодом адреса, остается в синхронизации по отношению ко времени, определяемому кодом абсолютного времени. Если в начале сеанса записи исходная величина кода абсолютного времени выбрана в соответствии с кодом адреса, место на дорожке, определяемое кодом абсолютного времени, будет всегда соответствовать месту на дорожке, определяемому кодом адреса. Преимущество этого заключается в том, что для обнаружения определенных частей записанного сигнала можно использовать как код абсолютного времени, так и код адреса. Если, как показано на фиг. 11,b, участки дорожки 141, на которых записаны сигналы синхронизации субкода, совпадают с участками дорожки 140, которые модули руются в соответствии с сигналами адресной синхронизации, то в этом случае разница между местами на дорожке, определяемыми кодами адреса и кодами абсолютного времени, будет минимальной. Следовательно, желательно при записи свести к минимуму разность фаз сигналов адресной синхронизации и сигналов синхронизации субкода. При считывании EFM-сигнала по считываемому сигналу восстанавливается канальная синхронизация. При считывании записанного EFM-си гнала канальная синхронизация должна быть восста новлена к моменту счи тывания первого субкодового блока с "полезной" (пользовательской) информацией. Этого можно достичь, например, путем добавления одного или нескольких блоков с "холостой" информацией в начале EFM-сигнала. Этот способ подхо дит особенно при записи EFM-сигнала на совершенно пустой серводорожке. Однако, если EFM-сигнал должен записываться рядом с ранее записанным EFM-сигналом, желательно выбрать на серводорожке 4 такую позицию начала записи нового EFM-сигнала, которая бы практически совпадала с позицией, в которой закончилась запись ранее записанного EFM-сигнала. Так как на практике точность расположения начала и конца записи составляет порядка нескольких кадров, либо будет оставаться небольшой пустой участок дорожки между участками дорожки, на которых записаны сигналы, либо первый и вто рой сигнал будут перекрывать друг друга. Наличие такого перекрытия или пустого участка дорожки приводит к то му, что нарушается восстановление канальной синхронизации. Поэтому рекомендуется выбирать границу 144 между двумя записанными EFM-сигналами 142 и 143 таким образом, чтобы она располагалась в зоне между участками 140 дорожки, как показано на фиг. 11,с. В силу это го участок от границы 144 до начала перво го блока, содержащего полезную инфор мацию, является достаточно большим для восстановления канальной синхронизации до достижения начала первого блока, содержащего полезную инфор мацию. Предпочтительно граница 144 выбирается таким образом, чтобы она находи лась перед серединой фрагмента дорожки между участками дорожки 140a и 140b, так как в этом случае обеспечивается относительно продолжительное время, в течение которого может быть восстановлена канальная синхронизация. Но в то же время граница 144 должна располагаться достаточно далеко от конца последнего субкодового блока, содержащего полезную информацию записанного EFM-сигнала 142 (этот конец соответствует позиции 141а) для того, что бы пре дотвратить перезаписывание последнего полного блока EFM-сигнала 142 и, следовательно, разрушение последней части инфор мации в последнем блоке EFM-сигнала 142 в результате неточности позиционирования начала записи EFM-сигнала 143. Помимо разрушения записанной информации, наложение приводит к снижению надежности считывания кода абсолютного вре мени, относящегося к последнему блоку, и конца сигнала синхронизации субкода этого блока. Поскольку коды абсолютного времени и сигналы синхронизации субкода используются для управления процессом чтения, желательно, чтобы число несчитываемых сигналов синхронизации субкода данных и сигналов кодов абсолютного времени было минимальным. Очевидно, что та информация EFM-сигнала 142, которая записана между позицией 141а и границей 144, не может считываться надежно. Следовательно, в этой части предпочтительно записывать хо лостую информацию, например, EFMсигналы, кодирующие паузу. На фиг. 4 показано устройство 50 для записи и чтения в соответствии с настоящим изобретением, с помощью которого EFM-сигнал записывается таким образом, что сигналы адресной синхронизации 11, представленные модуляцией дорожки, синхронизированы с сигналами синхронизации субкода записываемого EFM-модули рованного сигнала. Устройство 50 содержит приводной механизм 51 для вращения носителя записи 1 вокруг оси 52. Оп тическая считывающая/записывающая го ловка 53 располагается напротив вра щающего ся носителя записи 1. Считывающая/записывающая го ловка 53 содержит лазер для генерирования пучка излучения 55, который фокусируется для получе ния небольшого сканирующего пятна на носителе записи 1. Считывающая/записывающая го ловка 53 может работать в двух режимах: первом режиме (режим чтения), в котором лазер генерирует пучок излучения постоянной интенсивности, недоста точной для оптически различимого изменения записываемого слоя 6, и втором режиме (режим записи), в котором интенсивность луча излучения модули руется в зависимости от записываемого информационного сигнала для получе ния структуры отметок, соответствующих ин формационному сигналу Vi и ха ракте ризующихся измененными оптическими свойствами записываемого слоя 6 в месте расположения серводорожки 4. Устройство записи и чтения 50 содержит средство слежения обычного типа, которое удерживает сканирующее пятно, образуемое пучком излучения 55, в центре серводорожки 4. При сканировании серводорожки 4 отраженный пучок излучения 55 модулируется модуляцией дорожки. С помощью соответствующего оптического детектора считывающая/записывающая головка 53 детектирует модуляцию отраженного луча и выдает сигнал детекти рования Vd, представляющий де тектированную модуля цию. С помощью полосового фильтра 56 со средней частотой 22,05 кГц частотная составляющая, модулированная в соответствии с сигналом инфор мации об адресе и сформированная модуляцией дорожки, выделяется из сигнала детектирования. С помощью схемы восста новления по срезу, например, управляемого уровнем напряжения мультивибратора 57, выходной сигнал фильтра 56 преобразуется в двоичный сигнал, который подается на делитель частоты 59 через логический элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 58. Выход делителя частоты 59 соединен с одним из входов фа зового детектора 60. Эталонный сигнал частотой 22,05 кГц, формируемый схемой генерирования тактовых импульсов 63, подается на делитель частоты 62 через логический элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 58а. Выход делителя частоты 62 соединен с другим вхо дом фазового детектора 60. Сигнал, который представляет разность фаз, определенную фазовым детекто ром для сигналов на двух его вхо дах, подается на запускающую схему 61 для фор мирования запускающего сигнала для приводного механизма 51. Полученная таким образом схема управления с обратной связью представляет собой систе му регулирования скорости с фа зовой синхронизацией, которая сводит к минимуму обнаруживаемую разность фаз, которая является мерой изменения скорости. Ширина полосы пропускания системы регули рования скорости с фа зовой синхронизацией небольшая (обычно порядка 100 Гц) по сравнению с битовой скоростью (6300 Гц) сигнала информации об адресе. Более того, сигнал информации об адресе, которым модулируется частота модуля ции дорожки, не содержит никаких низкочастотных составляющих, так что эта частотная модуляция не оказывает влияние на управление скоростью, и таким образом скорость сканирования поддерживается постоянной и имеющей значение, для которого средняя частота частотных составляющих, образуемых в сигнале детектирования Vd модуляцией дорожки, поддерживается равной 22,05 кГц, что означает, что скорость сканирования поддерживается постоянной и равной величине, лежащей в диапазоне 1,2-1,4 м/с. Для осуществления записи устройство 50 содержит схе му EFM-модуляции 64 обычного ти па, которая преобразует входную инфор мацию в сигнал Vi, модулированный в соответствии со стандартом CD-ROM или CD-Audio. EFM-сигнал Vi подается на считывающую/записывающую го ловку 53 через соответствующую схе му модуля ции 71b, которая преобразует EFM-сигнал в последовательность импульсов та ким образом, что на серводорожке 4 записывается структура меток, соответствующи х EFM-си гналу Vi. Упомянутая схе ма модуляции 71b известна из описания к патенту США № 4,473,829. Схема EFM-модуляции 64 управляется уп равляющим сигналом, имеющим частоту, равную битовой скорости EFM – 4,3218 МГц. Управляющий сигнал формируется схемой 63 генерирования тактовых импульсов. Эталонный сигнал частотой 22,05 кГц, который также формируется схе мой 63 генерирования тактовы х импульсов, получается из сигнала частотой 4,3218 МГц делением частоты, так что устанавливается фиксированная зависимость между фа зами сигнала уп равления схемой EFM-модуляции 64 и эталонным сигналом 22,05 кГц. Так как сигнал управления схемой EFM-модуля ции 64 синхронизирован по фазе с эталонным сигналом частотой 22,05 кГц, сигнал детектирования Vd также является синхронизированным по фазе с упомянутым эталонным сигналом частотой 22,05 кГц, в силу че го коды абсолютного времени, генерируемые схемой EFM-модуляции 64, остаются синхронизированными с кодами адреса, представленными модуляцией сканируемой серводорожки 4. Однако если носитель записи 1 имеет дефекты, например, царапины, выпадения и т.д., то это, как оказалось, может привести к увеличению разности фаз сигнала кода адреса и кодов абсолютного вре мени. Для предотвращения этого определяется разность фаз сигналов синхронизации субкода, генерируемых схе мой EFM-модуля ции 64, и считываемых сигналов адресной синхронизации, и скорость сканирования корректи руется в зависимости от определенной таким образом разности фаз. С этой целью применяется схе ма демодуляции 65, которая выделяет сигналы адресной синхронизации и сигналы кода адреса из выходного сигнала фильтра 56 и затем выделяет коды адреса из сигналов кода адреса. Подробно описанная ниже схема демодуляции 65 подает коды адреса в микрокомпьютер 67 известного типа через шину 66. Кроме этого, схема демодуляции 65 подает через сигнальную линию 68 импульсный сигнал детекти рования VСИНХ, который показывает момент, в который детектируется сигнал адресной синхронизации. Схема EFM-модуля ции 64 содержит обычные средства фор мирования субкодовых сигналов и комбинирования субкодовых сигналов с др угой информацией EFM. Ко ды абсолютного вре мени могут формироваться с помощью счетчика 69 и подаваться в схему EFM-модуля ции 64 через шину 69а. Значение счетчика 69 увеличивается в ответ на управляющие импульсы с частотой 75 Гц. Управляющие импульсы для счетчика 69 получаются из управляющего сигнала частотой 4,3218 МГц путем деления частоты с помощью схе мы EFM-модуля ции 64 и подаются на вход счетчика 69 через линию 72а. Схема EFM-модуля ции 64 генерирует также сигнал Vcyб , который показывает момент, в который генерируется сигнал синхронизации субкода. Сигнал Vcyб подается в микрокомпьютер 67 через сигнальную линию 70. Счетчик 69 содержит входы для уста новки значения счетчика равным величине, подаваемой через эти входы. Эти входы для установки значения соединены с микрокомпьютером 67 через шину 71. Следует отметить, что можно также включить счетчик 69 в микрокомпьютер 67, как один из элементов последнего. В микрокомпьютер 67 загружена программа для позиционирования перед записью считывающей/записывающей го ловки 53 напротив требуе мой части дорожки. Положение считывающей/записывающей головки 53 относительно требуе мой части дорожки определяется с помощью кодов адреса, фор мируемых схе мой демодуляции 65, и считывающая/записывающая головка 53 перемещается в радиальном направлении, которое зависит от оп ределенного та ким образом положения, до тех пор, пока считывающая/записывающая головка не достигнет нужного положения. Для перемещения считывающей/записывающей головки 53 устройство содержит обычные средства для перемещения считывающей/записывающей го ловки в радиальном направлении, например, электродвигатель 76, управляемый микрокомпьютером 67, и шпиндель 77. Как только достигается необходимая часть дорожки, начальное значение счетчика 69 корректируется таким образом, чтобы установить начальную ве личину кода абсолютного времени равной величине, соответствующей коду адреса сканируемой части дорожки. Затем считывающая/записывающая головка 53 устанавливается в режим записи с помощью микрокомпьютера 67 через сигнальную линию 71а, и через сигнальную линию 72 активируется схе ма EFM-модуля ции 64 для начала записывания, при этом запись кодов абсолютного времени в EFM-сигнале поддерживается синхронной (указанным выше образом) с сигналом кода адреса, представленным модуляцией дорожки в позиции записи. Этим достигается преимущество, состоящее в том, что записанные коды абсолютного времени всегда соответствуют сигналам кодов адреса, представленным модуляцией дорожки на участке дорожки, на котором записываются упомянутые коды абсолютного времени. Это преимущество является особенно важным в тех случаях, когда различные инфор мационные сигналы записаны друг после друга, поскольку избегаются резкие изменения сигналов кода абсолютного времени на переходе между двумя последовательно записанными EFM-сигналами. Таким образом, для нахождения заданных частей записанных информационных сигналов можно использовать как коды абсолютного времени, записанные вместе с инфор мационным сигналом, так и сигналы кода адреса, представленные модуляцией дорожки, что обеспечивают очень гибкую систему поиска. Устройство 50 содержит также блок 75 демодуляции информационного сигнала. На фиг. 7 показан пример структуры меток 100, сформированных при записи EFM-сигнала Vi на серводорожку 4. Следуе т еще раз отметить, что ши рина полосы пропускания системы управления слежением значительно меньше частоты модуля ции сканирующего п учка излучения, определяемой модуляцией дорожки (в этом случае в виде волнообразного изгиба дорожки), так что погрешности слежения, вызываемые волнообразной формой дорожки, не оказывают влияния на управление слежением. Сканирующий луч будет не точно следовать по дорожке, но будет перемещаться по "прямой" траектории, которая представлена средним положением центра серводорожки 4. Однако амплитуда волнообразного изги ба дорожки, имеющая величину порядка 30х10-9м (=60x10-9 м от пика до пика), незначительна по сравнению с шириной дорожки, которая составляет порядка 10-6м, так что структура записанных меток 100 по существу всегда расположена по центру серводорожки 4. Следует отметить, что для простоты объяснения показан прямоугольный изгиб дорожки. Однако на практи ке предпочтительно используется синусоидальный волнообразный изгиб дорожки, поскольку это сво дит к минимуму число высокочастотных составляющи х в модуляции сканирующего пучка излучения 55, вызванной модуляцией дорожки, так что на считываемый EFM-сигнал оказывается минимальное воздействие. В режиме записи микрокомпьютером 67 выполняется программа для получе ния, исходя из сигналов У синх. и Vc yб , подаваемых через сигнальные линии 68 и 70, временного интервала между моментом, в который сигнал адресной синхронизации обнаруживается на сканируемой части дорожки, и моментом, в который генерируется сигнал синхронизации субкода. Пока сигнал адресной синхронизации опережает формирование сигнала синхронизации субкода на величину, большую чем некоторая заданная пороговая величина, микрокомпьютер 67 подает один или несколько дополнительных импульсных сигналов на делитель 59 через сигнальную линию 73 и логический элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 58 после детектирова ния каждого сигнала адресной синхронизации, что вызывает увеличение разности фаз, детекти руемой фазовым детектором 60, и уменьше ние скорости приводного механизма 51 с помощью запускающей схе мы 61, так что разность фаз сигналов адресной синхронизации и сигналов синхронизации субкода уменьшается. Если же детектируе мый сигнал адресной синхронизации запаздывает относительно формируе мого сигнала синхронизации субкода на величину, большую некоторой заданной пороговой величины, то микрокомпьютер 67 подает дополнительные импульсы на делитель 62 через сигнальную линию 74 и логический элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 58а. Это вызывает уменьшение разности фаз, детектируемой фазовым детекто ром, в результате че го скорость приводного механизма 51 увеличивается и разность фаз между детектируемыми сигналами адресной синхронизации и генерируемыми сигналами синхронизации субкода уменьшается. Таким образом обеспечивается поддержание двух синхронизирующих сигналов в постоянной синхронизации. Следует отметить, что в принципе возможно регулирование скорости записывания вместо скорости сканирования для поддержания требуемого соотношения фаз. Например, это может осуществляться путем регулирования частоты сигнала управления схемой EFM-модуляции 64 в зависимости от обнаруженной разности фаз. На фиг. 5 показана блок-схема программы для поддержания синхронизации. Программа содержит шаг S1, на котором определяется временной интервал Т между моментом детектирования Td считанного сигнала адресной синхронизации и моментом формирования То сигнала синхронизации субкода, исходя из сигналов Vc yб. и VСИНХ, подаваемых по сигнальным линиям 68 и 70. На шаге S2 определяется, является ли временной интервал Т больше заданной пороговой величины Тмакс. Если больше, то вы полняется шаг S3, на котором дополнительный импульсный сигнал подается на делитель 62. После шага S3 повто ряется шаг S1. Однако, если полученный таким образом временной интер вал Т меньше Тмакс. , после шага S2 выполняется ша г S4, на которой уста навливается, действительно ли временной интер вал Т меньше минимальной пороговой величи ны Тмин. Если меньше, то вы полняется шаг S5, на котором дополнительный импульсный сигнал подается на делитель 59. После шага S5 повто ряется шаг S1. Если на шаге S4 установлено, что вре менной интер вал Т не меньше пороговой ве личины, то до полнительный импульсный сигнал не ге нерируе тся и программа возвращается к выполнению шага S1 . На фиг. 12 по казана блок-схе ма программы для микрокомпьютера 67 для записи EFM-сигнала вместе с предварительно записанным EFM-си гналом. Программа включает ша г S10, на котором определяется код адреса АВ, показывающий по зицию, в которой заканчивается предварительно записанная информация. Этот код адреса может сохраняться в ЗУ микрокомпьютера 67, например после записи предшествующего сигнала. Более то го, на ша ге S10 определяют, исхо дя из количества подлежащих записи кадров, код адреса АЕ, который обозначает позицию, в которой запись должна заканчиваться. Эта информация может фор мироваться, например, с помощью запоминающего средства, в котором хранится подлежащая записи информация, с последующей подачей в микрокомпьютер 67. Эти за поминающее средство и способ определения размера записываемого сигнала вы ходят за рамки настоящего изобретения и, следова тельно, далее не описываются. После шага S10 вы полняется шаг S11, на котором считывающая/записывающая головка 53 известным образом позиционируется напротив участка дорожки, предшествующего позиции, в которой должна начинаться запись EFM-сигнала. Средства уп равления, пригодные для этой цели, подробно описаны, например, в описании к патенту США 4,106,058. Далее на шаге S11а ожидается поступ ление сигнала детектирования VСИНХ., который подается схемой демодуляции 65 через сигнальную линию 68 и который показывает, что новый считанный код адреса подается на шину 66. На шаге S12 этот код адреса считывается и на шаге S13 выполняется проверка того, соответствует ли этот считанный код адреса коду адреса АВ, показывающему исходную точку записи. Если соответствия нет, после шага S13 выполняют шаг S11a. Программный цикл, содержащий шаги S11a, S12 и S13, повторяется до тех пор, пока считанный код адреса не будет соответствовать коду адреса АВ. После этого на ша ге S14 начальное значение кода абсолютного времени в счетчике 69 устанавливается в соответствии с кодом адреса АВ. За тем на шаге S15 схема EFM-модуляции 64 акти вируется через сигнальную линию 72. На шаге S16 выдерживается время ожидания Td, которое соответствуе т смещению сканирующего пятна на расстояние, соответствующее расстоянию SW между границей 144 и предшествующим участком дорожки 140, фиг. 11с. В конце времени ожидания позиция сканирующего пятна на серводорожке 4 соответствуе т требуе мому исходному положению записи и считывающая/записывающая головка 53 устанавливается в режим записи на шаге S17, после чего начинается запись. Затем на шаге S18 ожидается каждый последующий импульсный сигнал детектирования VСИНХ., и после этого на шаге S19 считывается код адреса, затем на шаге S20 проверяется, соответствует ли считанный код адреса коду адреса АЕ, показывающему конец записи. В случае несоответствия программа возвращается к выполнению шага S18, а при соответствии выдерживается время ожидания Td на шаге S21, до перехода к шагу S22. На ша ге S22 считывающая/записывающая головка 53 вновь устанавливается в режим считывания. Затем на шаге S23 схема EFM-модуляции 64 отключается. В изложенном способе для определения позиций дорожки, соответствующи х началу и концу за писи, используются предварительно записанные коды адреса. Однако следует отметить, что для определения начальных и конечных позиций определение кодов адреса не обязательно. Например, можно определить положение сканируемой части дорожки путем подсчета предварительно записанных сигналов адресной синхронизации с начала серводорожки 4. На фиг. 6 показан подробно вариант осуществления схемы демодуляции 65. Схема демодуляции 65 содержит демодулятор ЧМ 80, который выделяет сигналы информации об адресе из выходного сигнала фильтра 56. Схема восстановления канальной синхронизации 81 восстанавливает канальную синхронизацию по выделенному сигналу инфор мации об адресе. Сигнал инфор мации об адресе также подается на схему сравнения 82, которая преобразует указанный сигнал в двоичный сигнал, который подается на 8-разрядный сдвиговый регистр 83, который управляется канальным такто вым импульсом. Параллельные выходные сигналы сдвигового регистра 83 подаются в детектор сигнала адресной синхронизации 84, который определяет соответствие битовой комбинации, хранящейся в сдвиговом регистре, сигналу адресной синхронизации. Последовательный вывод сдвигового регистра 83 соединен с демодулятором двухфазного сигнала 85 для восстановления кодовых битов кода адреса, представляемых модули рованным двухфазным сигналом инфор мации об адресе. Восстановленные кодовые биты подаются на сдвиговый регистр 86, который управляется тактовым сигналом, имеющим частоту, равную половине канальной тактовой частоты. Разрядность регистра равна количеству битов (38) сигнала кода адреса. Сдвиговый регистр 86 содержит первую секцию 86а, разрядность которой составляет 14 битов, и вторую секцию 86b разрядностью 24 бита, которая следует за первой секцией 86а. Параллельные выходы первой секции 86а и второй секции 86b соединены со схе мой детекти рования ошибок 87. Параллельные выводы вто рой секции 86b соединены с регистром сдвига с параллельным вводом и параллельным выводом 88. Код адреса восстанавливается следующим образом. Когда детектор сигнала адресной синхронизации 84 обнаруживает наличие битовой комбинации, соответствующей сигналу адресной синхронизации, в сдвиговом регистре 83, генерируется импульсный сигнал детектирования, который подается на схему задержки импульса 90 через сигнальную ли нию 89. Схема 90 задерживает импульсный сигнал детектирования на определенное время, соответствующее времени обработки демодулятора двухфазного сигнала, так что после того момента, в который импульсный сигнал детектирования из сигнальной линии 68 появляется на выходе схе мы задержки 90, полный код адреса присутствует в сдвиговом регистре 86. Демодулятор двухфазного сигнала 85, сдвиговый регистр 86, схема детекти рования ошибок 87 и регистр 88 образуют в совокупности блок выделения кода адреса. Задержанный импульсный сигнал детектирования с выхода схе мы 90 также подается на вход загруз ки регистра 88, в силу чего 24 бита, представляющие код адреса, загружаются в регистр 88 в ответ на задержанный импульсный сигнал обнаружения. Код адреса, загруженный в регистр 88, доступен на выходах ре гистра 88, которые подаются на микрокомпьютер 67 через шину 66. Схема детекти рования ошибок 87 также активируется задержанными импульсными сигналами детектирования на выходе схе мы 90, после чего схе ма детектирования ошибок 87 определяет надежность получен ного кода адреса в соответствии с обычными критериями. Выходной сигнал, который показывает надежность инфор мации об адресе, подается в микрокомпьютер 67 через сигнальную ли нию 91. На фиг. 8 показан вариант осуществления устройства 181 для изготовления носителя записи 1 в соответствии с настоящим изобретением. Устройство 181 содержит опорный диск 182, который вращается средством привода 183. Опорный диск 182 выполнен с возможностью установки на него носителя 184, имеющего форму диска, например, плоского стеклянного диска, снабженного чувстви тельным к излучению слоем 185, например, в ви де слоя фоторезиста. Лазер 186 генерирует пучок излучения 187, который направляется на чувствительный к излучению слой 185. Пучок излучения 187 вначале пропускается через отклоняющее устройство. Отклоняющее устройство относится к устройствам такого типа, с помощью которых пучок излучения может очень точно отклоняться в узком диапазоне. В данном примере это устройство представляет собой акустооптический модуля тор 190. Отклоняющее устройство также может быть реализовано устройствами другого ти па, например, зеркалом, поворачиваемым на небольшой угол, или электроопти ческим отклоняющим устройством. Границы диапазона отклонения показаны пунктиром на фиг. 8. Пучок излучения 187, отклоняемый акустоопти ческим модуля тором 190, пропускается через оптическую головку 196. Оптическая головка 196 содержит зеркало 197 и объектив 198 для фокусирования пучка излучения на чувствительный к излучению слой 185. Оптическая головка 196 может перемещаться в радиальном направлении относительно вращающего ся носителя 184 с помощью исполнительного механизма 199. С помощью описанной выше оптической системы пучок излучения 187 фокусируется для получе ния сканирующего пятна 102 на чувствительном к излучению слое 185, при этом положение сканирующего пятна 102 зависит от отклонения пучка излучения 187, выполняемого с помощью акустооптического модулятора 190, и от радиального положения записывающей головки 196 относительно носителя 184. В показанном положении оптической головки 196 сканирующее пятно 102 может перемещаться в диапазоне В1 с помощью отклоняющего устройства 190. С помощью оптической головки 196 сканирующее пятно 102 может быть перемещено в диапазоне В2 для указанного отклонения. Устройство 181 содержит управляющее устройство 101, которое, например, может содержать систему, подробно описанную в голландской патентной заявке № 8701448, которая здесь приводится в качестве ссылки. С помощью этого управляющего устройства 101 скорость средства привода 183 и радиальная скорость исполнительного механизма 199 регули руются таким образом, что чувствительный к излучению слой 185 сканируется пучком излучения 187 с постоянной скоростью сканирования вдоль спиральной траектории. Устройство 181 также содержит модулирующую схе му (генератор сигналов) 103 для формирования периодического управляющего сигнала, часто та которого модули руется в соответствии с сигналом информации об адресе. Мо дули рующая схема 103 будет подробно описана ниже. Управляющий сигнал, формируемый модули рующей схемой 103, подается на генератор 104, управляемый напряжением (ГУН), который формирует периодический управляющий сигнал, для акустоопти ческого модулятора 190, частота которого по существу пропорциональна уровню управляющего сигнала. Отк лонение, создаваемое акустоопти ческим модулятором 190, пропорционально частоте уп равляющего сигнала, так что смещение сканирующего пятна 102 пропорционально уровню управляющего сигнала. Модули рующая схема 103, ГУН 104 и акустооптический модулятор 190 согласованы друг с др угом таким образом, что амплитуда периодического радиального перемещения сканирующего пятна 102 составляет примерно 30х10-9 м. Кроме того, модули рующая схе ма 103 и управляющая схе ма 101 согласованы друг с другом таким образом, что отношение средней частоты управляющего сигнала к скорости сканирования чувствительного к излучению слоя 185 составляет от 22050/1,2 м -1 до 22050/1,4 м -1 , что означает, что в каждом периоде управляющего сигнала смещение чувствительного к излучению слоя 185 относительно сканирующего пятна находится в диапазоне от 54х106 до 64х10-6 м. После сканирования слоя 185 описанным выше способом указанный слой 185 подвергается травлению для удаления частей слоя 185, которые подвергались воздействию луча излучения 187, с получе нием мастер-диска, на котором образована канавка в форме периодического волнообразного в радиальном направлении изгиба, частота которого модули рована в соответствии с сигналом информации об адресе. С этого мастер-диска делаются копии, на которые наносится записываемый слой 6. На носителях записи, допускающи х запись, полученных та ким образом, часть носителя, соответствующая той части мастер-диска, с которой удален чувствительный к излучению слой 185, используется в качестве серводорожки 4 (которая может быть либо канавкой, либо выступом). Преимущество этого способа изготовления носителя записи, в котором серводорожка 4 соответствуе т той части мастер-диска, с которой удален чувствительный к излучению слой, состоит в том, что обеспечивается очень хорошая отражающая способность серводорожки 4 и, следовательно, удо влетворительное отношение сигнал/шум при считывании с носителя записи. Действительно, в этом случае серводорожка 4 соответствуе т очень гладкой поверхности носителя 184, который обычно изготавливается из стекла. На фиг. 9 показан пример модули рующей схемы 103. Модули рующая схе ма 103 содержит три каскадно включенных 8-битовых двоично-десятичных счетчика 110, 111 и 112. Счетчик 110 представляет собой 8 битовый счетчик с диапазоном счета до 75. После достижения максимального значения счетчик 110 подает тактовый импульс на вход счетчика 111, который используется в качестве счетчика секунд. После достижения его максимального значения – 59 – счетчик 111 подает тактовый импульс на вход счетчика 112, который используется в качестве счетчика минут. Значения счетчиков 110, 111 и 112 выдаются в схему 116 через параллельные выводы счетчиков для получе ния четырнадцати би тов четности для детектирования ошибки известным образом и через шины 113, 114 и 115 соответственно. Значения счетчиков 110, 111, 112 образуют в со вокупности генератор кодов адреса. Мо дулирующая схе ма 103 также содержит 42-битовый сдвиговый регистр 117, разделенный на пять последовательных секций 117а,...,117е. Битовая комбинация "1001" подается на четыре параллельных вхо да четырехразрядной секции 117а и преобразуется в сигнал адресной синхронизации 11 описанным ниже путем, во время модуля ции двухфазного сигнала. Каждая из секций 117b, 117с и 117d является восьмиразрядной, а секция 117е – четырнадцатиразрядной. Значение счетчика 112 подается на параллельные вхо ды секции 117b через шину 115. Значение счетчика 111 подается на параллельные входы секции 117с через шину 114. Значение счетчика 110 подается на параллельные вхо ды секции 117d через шину 113. Четырнадцать битов четности, сформированные схемой 116, подаются на параллельные входы секции 117е через шину 116а. Последовательный выходной сигнал сдвигового регистра подается на модуля тор 118 двухфазного сигнала. Выходной сигнал модуля тора 118 подается на модулятор ЧМ 119. Схе ма 103 также содержит генератор тактовых сигналов 120 для формирования управляющи х сигналов для счетчика 110, сдвигового регистра 117, модуля тора 118 двухфазного сигнала и модулятора 119. В настоящем примере при изготовлении мастер-диска чувствительный к излучению слой 185 сканируется со скоростью, соответствующей номинальной скорости сканирования EFM-модули рованных сигналов (1,2-1,4 м/с). Генератор тактовых си гналов 120 в таком случае генерирует тактовый сигнал 139 для счетчика 110 с часто той 75 Гц, так что значения счетчиков 110, 111 и 112 всегда будут представлять время, затраченное на сканирования слоя 185. Немедленно после начала функционирования счетчиков 110, 111 и 112 генератор тактовых сигналов 120 подает управляющий сигнал 128 на параллельный установочный вход сдвигово го регистра 117, инициируя загрузку сдвигового регистра в соответствии с сигналами, поданными на параллельные входы, а именно, битовой комбинацией "1001", значениями счетчиков 110, 111 и 112 и битами четности. Битовая комбинация, загруженная в сдвиговый регистр 117, подается на модуля тор 118 двухфазного сигнала через последовательный выход синхронно с такто вым сигналом 138, который генерируется генератором тактовых сигналов 120. Частота этого тактового сигнала 138 составляет 3150 Гц, так что значение всего сдвигового регистра будет извлечено в тот самый момент, когда он будет в очередной раз загружен через параллельные входы. Мо дулятор 118 двухфазного сигнала преобразует 42 бита из сдвигового регистра в 84 канальных бита сигнала кода адреса. С этой целью модуля тор 118 содержит тактируемый триггер 121, выходной логический уровень которого изменяется в соответствии с тактовым импульсом на тактовом вхо де. Сигналы синхронизации 122 формируются с помощью логической схемы исхо дя из сигналов 123, 124, 125 и 126, которые генерируются генератором тактовых сигналов 120, и исходя из последовательного выходного сигнала 127 сдвигового регистра 117. Выходной сигнал 127 подается на вход логического элемента И 129 с двумя входами. Сигнал 123 подается на другой вход ло гического элемента И 129. Выходной сигнал логического элемента И 129 подается на тактовый вход триггера 121 через логический элемент ИЛИ 130. Сигналы 125 и 126 подаются на входы логического элемента ИЛИ 131, выход которого сое динен с одним из вхо дов логиче ского элемен та И 132 с двумя вхо дами. Вы ходной сигнал логического элемента И 132 так же подается на такто вый вход тригге ра 121 че рез ло гический элемент ИЛИ 130. Сигналы 123 и 124 представляют собой два импульсных сигнала, смещенных по фазе на 180° (фиг. 10), с частотой, равной битовой скорости сигнала 127 (3150 Гц) с выхода сдвигового регистра 117. Сигналы 125 и 126 представляют собой отрицательные импульсы с частотой повторения 75 Гц. Фаза сигнала 125 такова, что отрицательный импульс сигнала 125 совпадает со вторым импульсом сигнала 124 после очередной загрузки сдвигового регистра 117. Отрицательный импульс сигнала 126 совпадает с четвертым импульсом сигнала 124 после очередной загруз ки сдвигового регистра 117. Мо дулированный двухфазный сигнал кода адреса формируется на выходе триггера 121 следующим образом. Импульсы сигнала 124 подаются на тактовый вход триггера 121 через логический элемент И 132 и логический элемент ИЛИ 130 таким образом, что логическое значение сигнала кода адреса изменяется в ответ на каждый импульс сигнала 124. Более того, если логическое значение сигнала 127 равно "1", импульс сигнала 123 передается на тактовый вход триггера 121 через логические элементы И 129 и ИЛИ 130, так что для каждого бита "1" получается дополнительное изменение величины логического сигнала. В принципе сигналы синхронизации генерируются аналогичным образом. Однако подача отрицательных импульсов сигналов 125 и 126 предотвращает передачу второго и четвертого импульсов сигнала 124 после очередной загрузки сдвигового регистра в триггер 121, формируя сигнал адресной синхронизации, отличный от модули рованного двухфазного сигнала. Следует отметить, что этот способ модули рования может привести к получе нию двух различных сигналов синхронизации, инвертированных один относительно другого. Полученный таким образом сигнал информации об адресе с выхода триггера 121 подается на модуля тор ЧМ 119, который может принадлежать к модуля торам с фиксированной зависимостью между частотами, генерируемыми на выходе модуля тора ЧМ, и би товой скоростью сигнала информации об адресе. Если управление скоростью сканирования не нарушается, сигналы синхронизации субкода в EFM-сигнале остаются в синхронизации с сигналами адресной синхронизации 11 на дорожке 4 при записи EFM-сигнала с помощью устройства 50. Нарушения в управлении скоростью, вызванные дефектами носителя записи, могут быть компенсированы путем тонкой корректировки, как показано со ссылкой на фиг. 4. В модуля торе ЧМ 119, фиг. 9, фор мируется предпочтительная зависимость между выходными частотами и битовыми скоростями сигнала информации об адресе. Мо дулятор ЧМ 119 содержит делитель частоты 137 с делителем «8». В зависимости от ло гической величины сигнала информации об адресе тактовый сигнал 134 с частотой (27)х(6300) Гц или тактовый сигнал 135 с частотой (29)х (6300) Гц подается на делитель частоты 137. Для это го модуля тор ЧМ 119 содер жит обычный мультиплексор 136. В зависимости от ло гиче ской величи ны сигнала инфор мации об адресе часто та вы ходного сигнала 133 модуля тора ЧМ соста вляет 29 /8 х6300=22,8375 Гц или 27 /8 х6300=21,2625 Гц. Так как значение частоты сигналов 134 и 135 кратно значению канальной битовой скорости сигнала инфор мации об адресе, размер одного канального составляет 29/8х6300=22,8375 Гц или 27/8х6300=21,2625 Гц. Так как значение частоты сигналов 134 и 135 кратно значению канальной битовой скорости сигнала инфор мации об адресе, размер одного канального бита соответствует це лому числу периодов тактовых сигналов 134 и 135, означая, что скачки фазы частотной модуляции являются минимальными. Более того, следует отметить, что по постоянной составляющей сигнала информации об адресе средняя частота ЧМ-модули рованного сигнала точно равна 22,05 кГц, в силу че го та кое ЧМ-модулирование практически не оказывает влияния на регулирование скорости. Следуе т также отметить, что в качестве модулятора ЧМ помимо модуля тора 119 (фиг. 9) могут быть использованы другие модуля торы ЧМ, например, обычный модулятор CPFSK (частотная манипуляция с непрерывной фазой). Модуля торы CPFSK описаны у А.Брюса Карлсона "Системы связи", МакГроу Хил, стр. 519. Более того, предпочтительным является применение модулятора ЧМ с синусоидальным выходным сигналом. При использовании модуля тора ЧМ 119 (фиг. 9), например, это достигается путем установки полосового фильтра между выходом делителя 137 и выходом модуля тора 119. Кроме того, следуе т отметить, что по лоса качания частоты составляет порядка 1 кГц. Наконец следует отметить, что объем изобретения не ограничивается описанными здесь вариантами осуществления. Например, в описанных вариантах осуществления частотный спектр сигнала информации об адресе практически не перекрывается с частотным спектром записываемого сигнала. Однако в этом случае сигнал информации об адресе, записанный с помощью предварительно выполненной модуляции дорожки, может всегда быть отличим от записанного позднее информационного сигнала. В случае магнитооптической записи частотные спектры предварительно записанного сигнала информации об адресе и записанного впоследствии информационного сигнала могут перекрывать друг друга. Действительно, во время сканирования пучком излучения модуляция дорожки вызывает модуляцию интенсивности пучка излучения, а информационная структура, сформированная магнитными доменами, модулирует направление поляризации (эффект Керра) отраженного излучения независимо от модуляции интенсивности. В описанных вариантах осуществления сканирующий пучок излучения модулируется в зависимости от записываемой информации. При записи на магнитооптический носитель записи можно модулировать магнитное поле вместо записывающего пучка излучения. Фиг. 1а Фиг. 1b Фиг. 1с Фиг. 1d Фиг. 2 Фиг. 3 Фиг. 4 Фиг. 5 Фиг. 6 Фиг. 7 Фиг. 8 Фиг. 9 Фиг. 10 Фиг. 11 Фиг. 12 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03
ДивитисяДодаткова інформація
Назва патенту англійськоюOptically readable record carrier that permits recording, appliance for making record carrier, appliance for information registration to carrier and appliance for record carrier reading
Автори англійськоюRaimakers Vilhelmus Petrus Maria
Назва патенту російськоюОптически считываемый носитель записи, разрешающий запись, устройство для изготовления носителя записи, устройство для записи информации на носитель записи и устройство для считывания носителя записи
Автори російськоюРаймакерс Вильхельмус Петрус Мария
МПК / Мітки
МПК: G11B 7/013, G11B 20/14, G11B 27/30
Мітки: дозволяє, носій, запису, носія, читання, пристрій, інформації, виготовлення, оптично, зчитуваний, записування
Код посилання
<a href="https://ua.patents.su/17-34410-optichno-zchituvanijj-nosijj-zapisu-shho-dozvolyaeh-zapisuvannya-pristrijj-dlya-vigotovlennya-nosiya-zapisu-pristrijj-dlya-zapisu-informaci-na-nosijj-zapisu-i-pristrijj-dlya-chitan.html" target="_blank" rel="follow" title="База патентів України">Оптично зчитуваний носій запису, що дозволяє записування, пристрій для виготовлення носія запису, пристрій для запису інформації на носій запису і пристрій для читання носія запису</a>
Пристрій для відтворення інформації з носія запису та носій запису для використання в такому пристрої
Номер патенту: 26862
Опубліковано: 29.12.1999
Автор: Тіммерманс Жозеф Марія Карел
Мітки: відтворення, пристрій, такому, носій, пристрої, використання, запису, інформації, носія
Текст:
...в субфайле TV/16 в виде картинок, которые полностью или частично заполняют экран дисплея, предпочтительно в последовательности, определяемой выбранным набором предпочтительных установок. Однако также возможно составить изображение в виде так называемого мозаичного изображения из субфайлов, в котором большее количество кодированных изображений малой четкости, содержащихся в субфайлах TV/16, воспроизводятся в виде матрицы,...
Спосіб запису інформації на носій запису та пристрій для його здійснення
Номер патенту: 27219
Опубліковано: 15.08.2000
Автор: Бакс Йоханнес Леопольдус
МПК: G11B 27/00, G11B 7/00
Мітки: носій, запису, пристрій, спосіб, здійснення, інформації
Формула / Реферат:
(57)1 Способ записи информации на носитель записи, при котором совместно с информационными сигналами в выбранных областях носителя записывают информационные образцы, характеризующие, по меньшей мере, один параметр, зависящий от параметров носителя записи и влияющий на качество записанных информационных образцов, воспроизводят и регулируют информационные образцы и информационные сигналы в процессе записи, отличающийся тем, что на...
Спосіб передачі інформації з використанням носія даних, носій інформації і пристрій для відтворення інформації з такого носія
Номер патенту: 26980
Опубліковано: 28.02.2000
Автор: Блютген Бйорн
МПК: G11B 7/24, G11B 20/10, H04N 5/76
Мітки: такого, пристрій, спосіб, носія, носій, інформації, даних, відтворення, передачі, використанням
Формула / Реферат:
1. Способ передачи информации с использованием носителя данных, заключающийся в форматировании данных с добавлением к основной информации цифровых субкодовых данных, записи полученной информации на носителе данных с образцами участков, имеющими различные физические свойства и представляющими основную и субкодовую информацию, считывании носителя записи с преобразованием образцов участков носителя в сигнал, изменения физической величины...
Пристрій для запису-відтворення на дисковий носій інформації
Номер патенту: 4357
Опубліковано: 27.12.1994
Автор: Брусиловський Мірон Ісаакович
МПК: G11B 25/04
Мітки: носій, пристрій, запису-відтворення, інформації, дисковий
Формула / Реферат:
Устройство для записи-воспроизведения на дисковый носитель информации, содержащее держатель с установочной поверхностью и осью вращения, сопряженный с ним приводной фрикционный ролик, закрепленный на каретке, сопряженный с ходовым винтом, элемент записи-воспроизведения, установленный на указанной каретке, электродвигатель и кинематически связанный сним приводной вал, установленный с возможностью вращения и продольного перемещения...
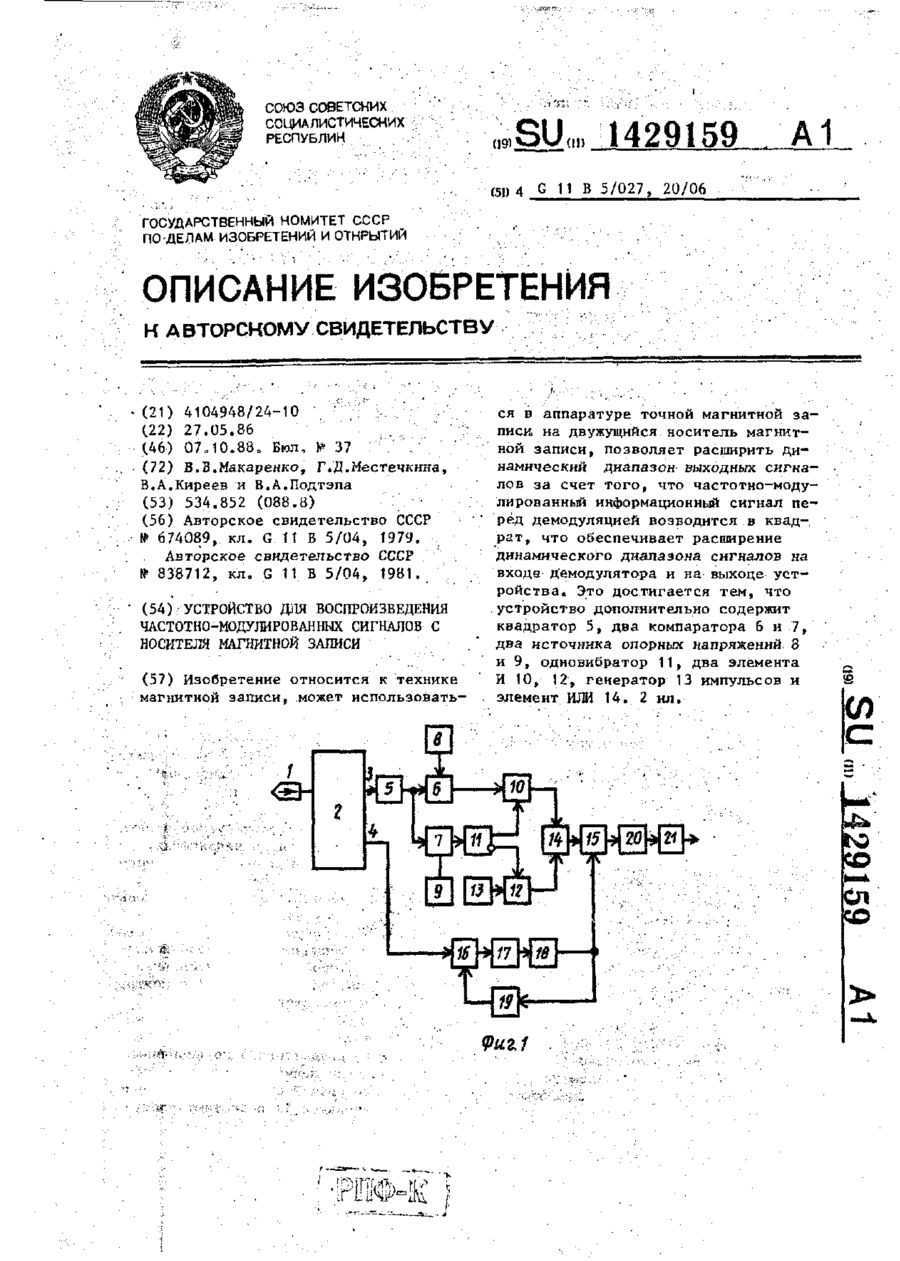
Пристрій для відтворення частотно-модульованних сигналів з носія магнітного запису
Номер патенту: 8883
Опубліковано: 30.09.1996
Автори: Местечкіна Галина Донівна, Макаренко Володимир Васильович, Кірєєв Володимир Олександрович, Подтепа Віктор Олексійович
МПК: G11B 20/06, G11B 5/027
Мітки: запису, носія, сигналів, частотно-модульованних, магнітного, відтворення, пристрій
Формула / Реферат:
Устройство для воспроизведения частотно-модулированных сигналов с носителя магнитной записи, содержащее воспроизводящую магнитную головку, подключенную к разделителю каналов с выходами информационного и опорного сигналов, а также подключенные к выходу опорного сигнала разделителя каналов и последовательно соединенные фазовый детектор, фильтр нижних частот, генератор, управляемый напряжением, связанный с управляющим входом регистра сдвига,...
Попередній патент: Клапан гідравлічний
Наступний патент: Термопластична композиція
Випадковий патент: Спосіб розрахунку об`єму, що вводиться через апарат для внутрішньовенного вливання з крапельницею