Спосіб цифрової обробки траєкторних сигналів локатора з покадровим синтезуванням апертури
Номер патенту: 73752
Опубліковано: 10.10.2012
Автори: Слюсарчук Олександр Олександрович, Федотов Борис Микитович

Формула / Реферат
1. Спосіб цифрової обробки траєкторних сигналів радіолокаційної станції з покадровим синтезуванням апертури антени, який полягає в тому, що прийняті, попередньо оброблені, виміряні, дискретизовані і оцифровані траєкторні сигнали розділяють на канали похилої дальності, усереднюють сигнали в кожному каналі зі зважуванням на лінійному інтервалі, який менше гранично припустимого, записують усереднені сигнали у пристрій пам'яті середніх значень доданків часткових сум, зважених цифрових сигналів, коректують фазу кожного усередненого значення траєкторних сигналів, за допомогою пристрою пам'яті опорних функцій та пристроїв множення, додавання та віднімання, записують скоректовані сигнали в пам'ять процесорів швидкого перетворення Фур'є, формують дискретний спектр траєкторних сигналів за допомогою пристроїв швидкого перетворення Фур'є, записують сформований дискретний спектр в пам'ять цифрової системи відображення та формують візуальне радіолокаційне зображення функції відбиття у вигляді парціальних кадрів, який відрізняється тим, що усереднюють оцифровані сигнали на лінійному інтервалі дискретизації, близькому до максимально допустимого без зважування і, перед виконанням операції фазової корекції розділяють записані сигнали з пристроїв пам'яті усереднених значень траєкторних сигналів по частотних піддіапазонах їх спектра за допомогою цифрових фільтрів, записують розділені дискретні сигнали каналів похилої дальності в пристрої пам'яті результатів фільтрації і компонують розділені за частотними піддіапазонами частини сигналів сусідніх каналів за похилою дальністю, штучно синтезуючи відбиті сигнали від прямокутних елементів каналів похилої дальності, які по ширині дорівнюють розрізняльній здатності за похилою дальністю, а їх довжина дорівнює лінійному розміру ширини діаграми спрямованості на дальності відповідного каналу за похилою дальністю.
2. Спосіб за п. 1, який відрізняється тим, що число частотних піддіапазонів ![]() , на які розділяють спектр відбитого сигналу
, на які розділяють спектр відбитого сигналу ![]() -го каналу похилої дальності, визначається шириною діаграми спрямованості передавальної антени в горизонтальній площині
-го каналу похилої дальності, визначається шириною діаграми спрямованості передавальної антени в горизонтальній площині ![]() , дальністю
, дальністю ![]() до субсмуги й розрізняльною здатністю
до субсмуги й розрізняльною здатністю ![]() по формулі:
по формулі:
![]() .
.
3. Спосіб за пп. 1, 2, який відрізняється тим, що ширина частотних піддіапазонів кожного ![]() -го каналу дальності дорівнює
-го каналу дальності дорівнює
![]() ,
,
де ![]() ;
; ![]() - верхня частота зрізу
- верхня частота зрізу ![]() -го фільтра;
-го фільтра;
![]() - нижня частота зрізу
- нижня частота зрізу ![]() -го фільтра.
-го фільтра.
4. Спосіб за п. 1-3, який відрізняється тим, що синтез сигналу відбиття від прямокутних елементів ![]() -го каналу дальності здійснюють по наступному алгоритму:
-го каналу дальності здійснюють по наступному алгоритму:
 ,
,
де
аmk - синтезоване значення сигналу відбиття від ![]() -ої прямокутної субсмуги зондування (
-ої прямокутної субсмуги зондування (![]() -го каналу дальності) в
-го каналу дальності) в ![]() -тій точці інтервалу синтезування;
-тій точці інтервалу синтезування;
![]() - сигнал
- сигнал ![]() -го фільтра при поділі
-го фільтра при поділі ![]() -го дискретного виміру
-го дискретного виміру ![]() -го каналу дальності;
-го каналу дальності;
![]() - номер частотного піддіапазону при поділі дискретних вимірів в каналі похилої дальності;
- номер частотного піддіапазону при поділі дискретних вимірів в каналі похилої дальності;
![]() - число піддіапазонів поділу спектра сигналу в
- число піддіапазонів поділу спектра сигналу в ![]() -му каналі похилої дальності.
-му каналі похилої дальності.
Текст
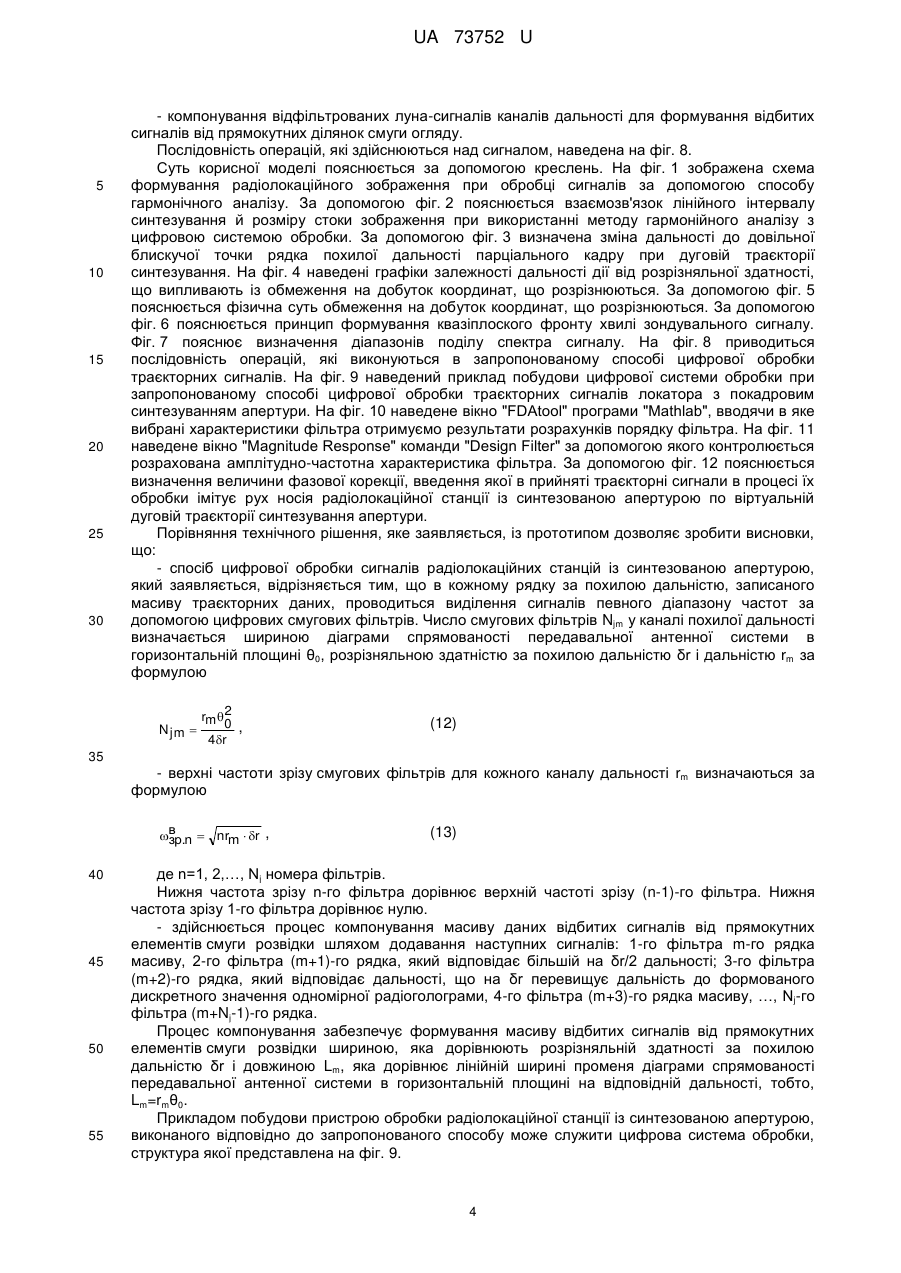
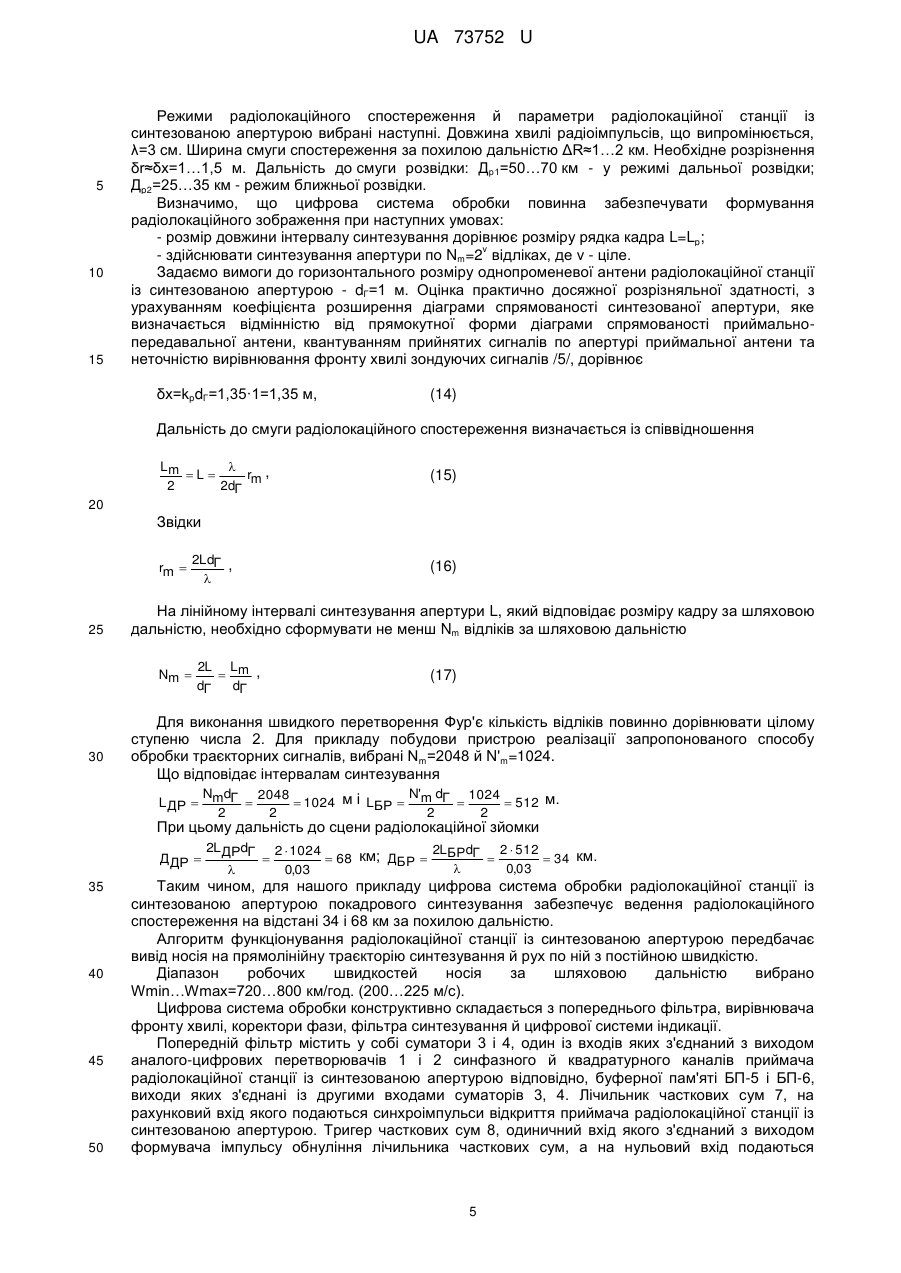
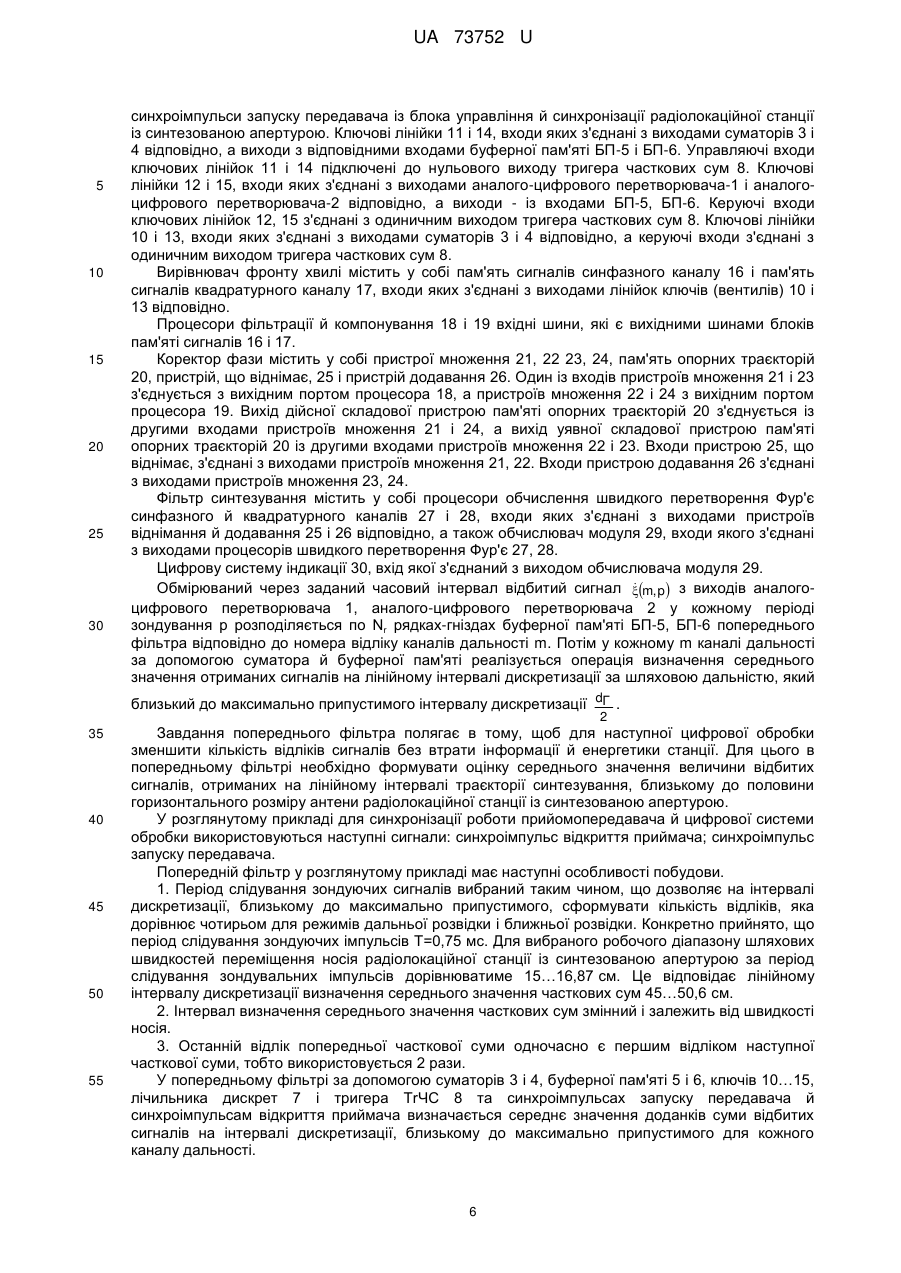
Реферат: Спосіб цифрової обробки траєкторних сигналів радіолокаційної станції з покадровим синтезуванням апертури антени полягає в тому, що усереднюють оцифровані сигнали на лінійному інтервалі дискретизації, близькому до максимально допустимого без зважування і, перед виконанням операції фазової корекції розділяють записані сигнали з пристроїв пам'яті усереднених значень траєкторних сигналів по частотних піддіапазонах їх спектра за допомогою цифрових фільтрів. UA 73752 U (12) UA 73752 U UA 73752 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до області радіолокації, зокрема до цифрових систем обробки траєкторних сигналів радіолокаційних станцій із синтезованою апертурою. Він може бути використаний у військовій сфері та для оперативного моніторингу природних і техногенних катастроф. Обробка траєкторних сигналів, отриманих у результаті руху носія радіолокаційної станції, дозволяє одержувати надвисоке розрізнення по шляховій дальності, яке визначається кутом синтезування апертури. Відомо кілька способів цифрової обробки траєкторних сигналів. Найбільш відомим є класичний спосіб обробки траєкторних сигналів в смуговій радіолокаційній станції за допомогою узгодженого фільтра [1]. До недоліків способу необхідно віднести великий обсяг обчислень при обробці траєкторних сигналів й структурне обмеження дальності дії, обумовлене сферичністю фронту хвилі зондуючого сигналу. Відомий також спосіб обробки траєкторних сигналів в смуговій радіолокаційній станції із синтезованою апертурою, при якому у процесі обробки штучно формується квазіплоский фронт хвилі зондувального сигналу й після цього здійснюється узгоджена фільтрація [2]. Недоліком даного способу обробки є великий обсяг обчислень, який при сучасному рівні обчислювальної техніки практично не дозволяє одержати радіолокаційне зображення необхідної ділянки в реальному масштабі часу та з високою розрізняльною здатністю. Найбільш близьким технічним рішенням, прийнятим за прототип, є спосіб цифрової обробки траєкторних сигналів шляхом гармонійного аналізу [3]. Суть способу гармонійного аналізу полягає в тому, що прийняті, попередньо оброблені, виміряні, дискретизовані і оцифровані траєкторні сигнали розділяють на канали похилої дальності, усереднюють сигнали в кожному каналі зі зважуванням на лінійному інтервалі, який менше гранично припустимого, записують усереднені сигнали у пристрій пам'яті середніх значень доданків часткових сум, зважених цифрових сигналів, коректують фазу кожного усередненого значення траєкторних сигналів, за допомогою пристрою пам'яті опорних функцій та пристроїв множення, записують скоректовані сигнали в пам'ять процесорів швидкого перетворення Фур'є, формують дискретний спектр траєкторних сигналів за допомогою пристроїв швидкого перетворення Фур'є, записують сформований дискретний спектр в пам'ять цифрової системи відображення та формують візуальне радіолокаційне зображення функції відбиття у вигляді парціальних кадрів В процесі обробки з сигналів відбиття субсмуг парціального кадру виділяється відбитий сигнал (фіг. 1) від ділянки, яка опромінюється протягом вибраного інтервалу синтезування (фіг. 2 - заштрихована область). Дискретні значення сигналу для кожної субсмуги, що стробується, є значеннями функції відбиття від смужок поверхні розміром δr×Lm де δr - розрізнення за похилою дальністю, Lm лінійний розмір променя діаграми спрямованості у горизонтальній площині на дальності rm. Значення дискретно-квантових відліків є суперпозицією луна-сигналів точкових відбивачів, стробованої субсмуги δr×Lm. Ідеологія обробки сигналів полягає в тому, що при віртуальній траєкторії синтезування - дузі окружності із центром у центрі субсмуги зондованого кадру, сигнал від кожної блискучої точки має свою кутову частоту, що дорівнює відстані від блискучої точки до центру субсмуги. Дійсна зміна дальності до відбивача, що перебуває в довільній точці Q(x, 0) (див. фіг. 3) субсмуги при дуговій траєкторії синтезування дорівнює x2 x2 2 2 r TQ CQ rm x 2 2rm x cos rm x 2 rm x sin rm x sin , 2rm 2rm 2 50 де γ - кут візування центру субсмуги сцени зондування, який відлічується від траверзу лінії заданого шляху. Для малих кутів синтезування r=γх, 55 (1) (2) Тобто, для відносно малих кутів синтезування апертури зміна відстані до блискучої точки пропорційна відстані від центру окружності, що утворює дугову траєкторію синтезування, до блискучої точки по координаті шляхової дальності. Траєкторний сигнал від блискучої точки є гармонійним коливанням просторової частоти р=х. Зміна фази сигналу на дуговій траєкторії синтезування дорівнює 1 UA 73752 U 5 10 15 20 25 30 4 4 , r x (3) Таким чином, фаза сигналу, відбитого від блискучої точки, лінійно змінюється при зміні напрямку опромінення. Коефіцієнт лінійності визначається довжиною хвилі та координатою елемента, що відбиває, за шляховою дальністю щодо центру окружності, дуга якої утворює траєкторію синтезування. Обробка траєкторного сигналу методом гармонійного аналізу при прямолінійній траєкторії носія радіолокаційної станції із синтезованою апертурою дозволяє формувати неспотворений спектр функції відбиття. Обробка траєкторного сигналу в кожному каналі похилої дальності складається із двох етапів. На першому етапі в попередньому фільтрі при використанні способу часткового сумування здійснюється визначення середнього значення відбитого сигналу на лінійному інтервалі дискретизації, меншому за максимально припустимий в кожному каналі похилої дальності. На другому етапі відліки траєкторного сигналу, які належать до одного парціального кадру синтезування m, p1 , перемножуються на опорну функцію h2 m, k . У результаті перемноження на опорну функцію h2 m, k сигнал від кожної блискучої точки субсмуги за похилою дальністю на траєкторії синтезування являє собою дискретизоване гармонійне коливання, частота якого пропорційна відстані від центру субсмуги до блискучої точки. Після множення на опорну функцію h2 m, k сигнали подаються в пам'ять цифрового процесора. Цифровий процесор здійснює швидке перетворення Фур'є попередньо обробленого траєкторного сигналу. Обробка траєкторних сигналів здійснюється роздільно для синфазного й квадратурного каналів. Далі по відліках дійсної та уявної складових сигналів перетворених матриць пам'яті синфазного і квадратурного каналів здійснюється обчислення їх модуля й формування результуючої матриці чисел, які є радіолокаційним зображенням парціального кадру. Недоліком способу цифрової системи обробки сигналів радіолокаційної станції із синтезованою апертурою шляхом гармонійного аналізу, який вибраний за прототип, є те, що він має структурне обмеження дальності дії, яке пов'язано зі сферичністю фронту хвилі зондувального сигналу. Структурне обмеження дальності дії радіолокаційної станції із синтезованою апертурою з розглянутою цифровою системою обробки сигналів від розрізняльної здатності й довжини хвилі має вигляд (4) R 16 x 2 r 2 , (4) 35 40 45 50 При побудові авіаційних радіолокаційних станцій із синтезованою апертурою оптимальним частотним діапазоном є сантиметровий. У ньому працюють практично всі сучасні станції. Для покадрової радіолокаційної станції із синтезованою апертурою, цифрова система обробки, яка побудована по способу-прототипу, залежність дальності дії від розрізняльної здатності (при λ=3 см і λ=4 см δх=δr) представлена на фіг. 4. Тобто при розрізняльній здатності δх=δr=1 м структурне обмеження дальності дії становить 10 км і 17,8 км при λ=4 см і λ=3 см відповідно. При способі-прототипі побудови цифрової системи обробки радіолокаційної станцій із синтезованою апертурою час обробки траєкторного сигналу мінімальний із усіх відомих, але йому властиві істотні структурні обмеження дальності дії. Корисною моделлю вирішується задача, шляхом додаткової обробки траєкторних сигналів вирішити протиріччя між розрізняльною здатністю й дальністю дії, яке обумовлено сферичністю фронту хвилі зондувального сигналу. Це дозволяє, використовуючи запропонований спосіб цифрової обробки сигналів, проектувати радіолокаційні станції із синтезованою апертурою надвисокого розрізнення, дальність дії яких не має структурних обмежень, обумовлених кривизною фронту хвилі зондувальних сигналів, а радіолокаційне зображення може формуватися в реальному (квазіреальному) масштабі часу на суттєво більшій дальності. Суть корисної моделі полягає в наступному. Структурне обмеження дальності дії радіолокаційної станції із синтезованою апертурою пов'язане з тим, що при стробуванні 2 UA 73752 U 5 10 виділяється відбитий сигнал від кільцевого сектору із центральним кутом, який дорівнює азимутальній ширині діаграми спрямованості приймальної антени (див. фіг. 5). Але при цьому алгоритм обробки заснований на тому, що фронт хвилі зондуючого сигналу плоский, тобто при стробуванні виділяється відбитий сигнал від прямокутної ділянки поверхні розміром δr×rmθ0, де θ0 - ширина діаграми спрямованості приймальної антени радіолокаційної станції із синтезованою апертурою в горизонтальній площині rm - дальність до стробованої субсмуги. Ідея полягає в тому, щоб за допомогою фільтрації, відбитий сигнал кожного стробованого кільцевого сектора розкласти на сигнали від декількох підсекторів, які складають кільцевий сектор. А потім з відфільтрованих сигналів підсекторів сусідніх каналів (кільцевих підсекторів за похилою дальністю) сформувати сигнал, відбитий від ділянок земної поверхні, що мають геометричну форму, близьку до прямокутної (фіг. 6). Число фільтрів Njm у кожному каналі m за похилою дальністю визначається шириною діаграми спрямованості передавальної антени в горизонтальній площині θ0, розрізняльною здатністю за похилою дальністю δr і дальністю rm до каналу (див. фіг. 7) і дорівнює 15 N jm 20 2 rm rm tg 0 2 r 2 2 rm (5) , Ширина смуги 1-го фільтра визначається кутом θ1, при якому різниця відстаней MQ, відповідна до різниці відрізків (CM CT), дорівнює половині розрізняльної здатності за похилою дальністю δr/2 (фіг. 7). Тобто, CT 2 MT2 CT r 2 , (6) Звідки L rm 1 x1 r 2 rm r , 2 (7) 25 Обмежуючись двома першими членами розкладення радикала в ряд, одержимо L x1 rm r , 30 Максимальна просторова частота в спектрі кутових частот визначається половиною розміру поверхні, що відбиває, по відповідній координаті. Тобто максимальна просторова частота, яку пропускає перший фільтр ωф1max=Lx1 [рад/с], 35 (8) (9) Таким чином, частота зрізу першого фільтра, який є фільтром нижніх частот, дорівнює Lx1 [рад/с]. Другий фільтр буде смуговим. Його верхня частота зрізу визначається співвідношенням NT L x2 2rm r , (10) Для фільтра з довільним номером n верхня частота зрізу Lxn дорівнює 40 L xn nrm r . 45 (11) Відмінними ознаками корисної моделі є: - цифрова фільтрація сигналів у каналах для виділення відбитого сигналу від частин субсмуги за похилою дальністю. При цьому частоти зрізу та режекції фільтрів відповідають, певним чином вибраним, кутам візування θ1, θ2, … θn; 3 UA 73752 U 5 10 15 20 25 30 - компонування відфільтрованих луна-сигналів каналів дальності для формування відбитих сигналів від прямокутних ділянок смуги огляду. Послідовність операцій, які здійснюються над сигналом, наведена на фіг. 8. Суть корисної моделі пояснюється за допомогою креслень. На фіг. 1 зображена схема формування радіолокаційного зображення при обробці сигналів за допомогою способу гармонічного аналізу. За допомогою фіг. 2 пояснюється взаємозв'язок лінійного інтервалу синтезування й розміру стоки зображення при використанні методу гармонійного аналізу з цифровою системою обробки. За допомогою фіг. 3 визначена зміна дальності до довільної блискучої точки рядка похилої дальності парціального кадру при дуговій траєкторії синтезування. На фіг. 4 наведені графіки залежності дальності дії від розрізняльної здатності, що випливають із обмеження на добуток координат, що розрізнюються. За допомогою фіг. 5 пояснюється фізична суть обмеження на добуток координат, що розрізнюються. За допомогою фіг. 6 пояснюється принцип формування квазіплоского фронту хвилі зондувального сигналу. Фіг. 7 пояснює визначення діапазонів поділу спектра сигналу. На фіг. 8 приводиться послідовність операцій, які виконуються в запропонованому способі цифрової обробки траєкторних сигналів. На фіг. 9 наведений приклад побудови цифрової системи обробки при запропонованому способі цифрової обробки траєкторних сигналів локатора з покадровим синтезуванням апертури. На фіг. 10 наведене вікно "FDAtool" програми "Mathlab", вводячи в яке вибрані характеристики фільтра отримуємо результати розрахунків порядку фільтра. На фіг. 11 наведене вікно "Magnitude Response" команди "Design Filter" за допомогою якого контролюється розрахована амплітудно-частотна характеристика фільтра. За допомогою фіг. 12 пояснюється визначення величини фазової корекції, введення якої в прийняті траєкторні сигнали в процесі їх обробки імітує рух носія радіолокаційної станції із синтезованою апертурою по віртуальній дуговій траєкторії синтезування апертури. Порівняння технічного рішення, яке заявляється, із прототипом дозволяє зробити висновки, що: - спосіб цифрової обробки сигналів радіолокаційних станцій із синтезованою апертурою, який заявляється, відрізняється тим, що в кожному рядку за похилою дальністю, записаного масиву траєкторних даних, проводиться виділення сигналів певного діапазону частот за допомогою цифрових смугових фільтрів. Число смугових фільтрів Njm у каналі похилої дальності визначається шириною діаграми спрямованості передавальної антенної системи в горизонтальній площині θ0, розрізняльною здатністю за похилою дальністю δr і дальністю rm за формулою N jm rm2 0 , 4r (12) 35 - верхні частоти зрізу смугових фільтрів для кожного каналу дальності rm визначаються за формулою в .n nrm r , зр 40 45 50 55 (13) де n=1, 2,…, Nj номера фільтрів. Нижня частота зрізу n-го фільтра дорівнює верхній частоті зрізу (n-1)-го фільтра. Нижня частота зрізу 1-го фільтра дорівнює нулю. - здійснюється процес компонування масиву даних відбитих сигналів від прямокутних елементів смуги розвідки шляхом додавання наступних сигналів: 1-го фільтра m-го рядка масиву, 2-го фільтра (m+1)-го рядка, який відповідає більшій на δr/2 дальності; 3-го фільтра (m+2)-го рядка, який відповідає дальності, що на δr перевищує дальність до формованого дискретного значення одномірної радіоголограми, 4-го фільтра (m+3)-го рядка масиву, …, Nj-гo фільтра (m+Nj-1)-го рядка. Процес компонування забезпечує формування масиву відбитих сигналів від прямокутних елементів смуги розвідки шириною, яка дорівнюють розрізняльній здатності за похилою дальністю δr і довжиною Lm, яка дорівнює лінійній ширині променя діаграми спрямованості передавальної антенної системи в горизонтальній площині на відповідній дальності, тобто, Lm=rmθ0. Прикладом побудови пристрою обробки радіолокаційної станції із синтезованою апертурою, виконаного відповідно до запропонованого способу може служити цифрова система обробки, структура якої представлена на фіг. 9. 4 UA 73752 U 5 10 15 Режими радіолокаційного спостереження й параметри радіолокаційної станції із синтезованою апертурою вибрані наступні. Довжина хвилі радіоімпульсів, що випромінюється, λ=3 см. Ширина смуги спостереження за похилою дальністю ΔR≈1…2 км. Необхідне розрізнення δr≈δx=1…1,5 м. Дальність до смуги розвідки: Др1=50…70 км - у режимі дальньої розвідки; Дp2=25…35 км - режим ближньої розвідки. Визначимо, що цифрова система обробки повинна забезпечувати формування радіолокаційного зображення при наступних умовах: - розмір довжини інтервалу синтезування дорівнює розміру рядка кадра L=Lp; v - здійснювати синтезування апертури по Nm=2 відліках, де v - ціле. Задаємо вимоги до горизонтального розміру однопроменевої антени радіолокаційної станції із синтезованою апертурою - dГ=1 м. Оцінка практично досяжної розрізняльної здатності, з урахуванням коефіцієнта розширення діаграми спрямованості синтезованої апертури, яке визначається відмінністю від прямокутної форми діаграми спрямованості приймальнопередавальної антени, квантуванням прийнятих сигналів по апертурі приймальної антени та неточністю вирівнювання фронту хвилі зондуючих сигналів /5/, дорівнює δx=kpdГ=1,35·1=1,35 м, (14) Дальність до смуги радіолокаційного спостереження визначається із співвідношення Lm L rm , 2 2dГ (15) 20 Звідки rm 25 (16) На лінійному інтервалі синтезування апертури L, який відповідає розміру кадру за шляховою дальністю, необхідно сформувати не менш Nm відліків за шляховою дальністю Nm 30 2LdГ , 2L Lm , dГ dГ (17) Для виконання швидкого перетворення Фур'є кількість відліків повинно дорівнювати цілому ступеню числа 2. Для прикладу побудови пристрою реалізації запропонованого способу обробки траєкторних сигналів, вибрані Nm=2048 й N'm=1024. Що відповідає інтервалам синтезування L ДР NmdГ 2048 N' d 1024 1024 м і LБР m Г 512 м. 2 2 2 2 При цьому дальність до сцени радіолокаційної зйомки Д ДР 35 40 45 50 2L ДРdГ 2L d 2 512 2 1024 34 км. 68 км; ДБР БР Г 0,03 0,03 Таким чином, для нашого прикладу цифрова система обробки радіолокаційної станції із синтезованою апертурою покадрового синтезування забезпечує ведення радіолокаційного спостереження на відстані 34 і 68 км за похилою дальністю. Алгоритм функціонування радіолокаційної станції із синтезованою апертурою передбачає вивід носія на прямолінійну траєкторію синтезування й рух по ній з постійною швидкістю. Діапазон робочих швидкостей носія за шляховою дальністю вибрано Wmin…Wmax=720…800 км/год. (200…225 м/с). Цифрова система обробки конструктивно складається з попереднього фільтра, вирівнювача фронту хвилі, коректори фази, фільтра синтезування й цифрової системи індикації. Попередній фільтр містить у собі суматори 3 і 4, один із входів яких з'єднаний з виходом аналого-цифрових перетворювачів 1 і 2 синфазного й квадратурного каналів приймача радіолокаційної станції із синтезованою апертурою відповідно, буферної пам'яті БП-5 і БП-6, виходи яких з'єднані із другими входами суматорів 3, 4. Лічильник часткових сум 7, на рахунковий вхід якого подаються синхроімпульси відкриття приймача радіолокаційної станції із синтезованою апертурою. Тригер часткових сум 8, одиничний вхід якого з'єднаний з виходом формувача імпульсу обнуління лічильника часткових сум, а на нульовий вхід подаються 5 UA 73752 U 5 10 15 20 25 30 синхроімпульси запуску передавача із блока управління й синхронізації радіолокаційної станції із синтезованою апертурою. Ключові лінійки 11 і 14, входи яких з'єднані з виходами суматорів 3 і 4 відповідно, а виходи з відповідними входами буферної пам'яті БП-5 і БП-6. Управляючі входи ключових лінійок 11 і 14 підключені до нульового виходу тригера часткових сум 8. Ключові лінійки 12 і 15, входи яких з'єднані з виходами аналого-цифрового перетворювача-1 і аналогоцифрового перетворювача-2 відповідно, а виходи - із входами БП-5, БП-6. Керуючі входи ключових лінійок 12, 15 з'єднані з одиничним виходом тригера часткових сум 8. Ключові лінійки 10 і 13, входи яких з'єднані з виходами суматорів 3 і 4 відповідно, а керуючі входи з'єднані з одиничним виходом тригера часткових сум 8. Вирівнювач фронту хвилі містить у собі пам'ять сигналів синфазного каналу 16 і пам'ять сигналів квадратурного каналу 17, входи яких з'єднані з виходами лінійок ключів (вентилів) 10 і 13 відповідно. Процесори фільтрації й компонування 18 і 19 вхідні шини, які є вихідними шинами блоків пам'яті сигналів 16 і 17. Коректор фази містить у собі пристрої множення 21, 22 23, 24, пам'ять опорних траєкторій 20, пристрій, що віднімає, 25 і пристрій додавання 26. Один із входів пристроїв множення 21 і 23 з'єднується з вихідним портом процесора 18, а пристроїв множення 22 і 24 з вихідним портом процесора 19. Вихід дійсної складової пристрою пам'яті опорних траєкторій 20 з'єднується із другими входами пристроїв множення 21 і 24, а вихід уявної складової пристрою пам'яті опорних траєкторій 20 із другими входами пристроїв множення 22 і 23. Входи пристрою 25, що віднімає, з'єднані з виходами пристроїв множення 21, 22. Входи пристрою додавання 26 з'єднані з виходами пристроїв множення 23, 24. Фільтр синтезування містить у собі процесори обчислення швидкого перетворення Фур'є синфазного й квадратурного каналів 27 і 28, входи яких з'єднані з виходами пристроїв віднімання й додавання 25 і 26 відповідно, а також обчислювач модуля 29, входи якого з'єднані з виходами процесорів швидкого перетворення Фур'є 27, 28. Цифрову систему індикації 30, вхід якої з'єднаний з виходом обчислювача модуля 29. Обмірюваний через заданий часовий інтервал відбитий сигнал m, p з виходів аналогоцифрового перетворювача 1, аналого-цифрового перетворювача 2 у кожному періоді зондування р розподіляється по Nr рядках-гніздах буферної пам'яті БП-5, БП-6 попереднього фільтра відповідно до номера відліку каналів дальності m. Потім у кожному m каналі дальності за допомогою суматора й буферної пам'яті реалізується операція визначення середнього значення отриманих сигналів на лінійному інтервалі дискретизації за шляховою дальністю, який близький до максимально припустимого інтервалу дискретизації dГ . 2 35 40 45 50 55 Завдання попереднього фільтра полягає в тому, щоб для наступної цифрової обробки зменшити кількість відліків сигналів без втрати інформації й енергетики станції. Для цього в попередньому фільтрі необхідно формувати оцінку середнього значення величини відбитих сигналів, отриманих на лінійному інтервалі траєкторії синтезування, близькому до половини горизонтального розміру антени радіолокаційної станції із синтезованою апертурою. У розглянутому прикладі для синхронізації роботи прийомопередавача й цифрової системи обробки використовуються наступні сигнали: синхроімпульс відкриття приймача; синхроімпульс запуску передавача. Попередній фільтр у розглянутому прикладі має наступні особливості побудови. 1. Період слідування зондуючих сигналів вибраний таким чином, що дозволяє на інтервалі дискретизації, близькому до максимально припустимого, сформувати кількість відліків, яка дорівнює чотирьом для режимів дальньої розвідки і ближньої розвідки. Конкретно прийнято, що період слідування зондуючих імпульсів Т=0,75 мс. Для вибраного робочого діапазону шляхових швидкостей переміщення носія радіолокаційної станції із синтезованою апертурою за період слідування зондувальних імпульсів дорівнюватиме 15…16,87 см. Це відповідає лінійному інтервалу дискретизації визначення середнього значення часткових сум 45…50,6 см. 2. Інтервал визначення середнього значення часткових сум змінний і залежить від швидкості носія. 3. Останній відлік попередньої часткової суми одночасно є першим відліком наступної часткової суми, тобто використовується 2 рази. У попередньому фільтрі за допомогою суматорів 3 і 4, буферної пам'яті 5 і 6, ключів 10…15, лічильника дискрет 7 і тригера ТrЧС 8 та синхроімпульсах запуску передавача й синхроімпульсам відкриття приймача визначається середнє значення доданків суми відбитих сигналів на інтервалі дискретизації, близькому до максимально припустимого для кожного каналу дальності. 6 UA 73752 U 5 Середні значення доданків часткових сум записуються в пам'ять сигналів синфазного 16 і квадратурного 17 каналів попереднього фільтра. Із блоків пам'яті синфазного й квадратурного каналів попереднього фільтра сигнали надходять у процесори фільтрації й компонування, які формують відбитий сигнал від прямокутних субсмуг за похилою дальністю. Процес фільтрації розділяє сигнали кожної m-ої субсмуги поверхні, що відбиває, якій відповідає чарунка рядка числового масиву траєкторних сигналів за похилою дальністю аmk (сигналів відбиття від кільцевих секторів) на Njm складових за допомогою смугових фільтрів. Смуги пропускання фільтрів стикуються між собою й мають ширину 10 rmr 15 n 1 , (18) де n=1, 2, 3 … Njm - номер фільтра в m-му каналі дальності. Ці фільтри повністю перекривають смугу кутових частот, які відповідають розміру рядка Lp парціального кадру радіолокаційного зображення. У розглянутому прикладі для рядка парціального кадру, що відповідає дальності 68 км число фільтрів Nj дорівнює Nj 20 n r682 68000 0,032 0 11 , 4r 4 114 , (19) Верхні кутові частоти пропускання при ідеальній фільтрації для рядка парціального кадру, що відповідає дальності 68 км, визначені зі співвідношення в nrmr , n (20) де n=1, 2,…, 11 номера фільтрів, і дорівнюють: в 300 рад / с; в 434 рад / с; в 532 рад / с; в 614 рад / с; 4 1 2 3 в 686 рад / с; в 752 рад / с; в 812 рад / с; в 868 рад / с; , 5 7 6 8 в 921 рад / с; в 970 рад / с; в 1018 рад / с. 9 10 11 (21) 25 30 Розрахунки коефіцієнтів фільтра проведені за допомогою програми розрахунків фільтрів у середовищі "Mathlab". При цьому параметри частот зрізу й режекції вибрані таким чином, щоб розширення синтезованої діаграми спрямованості за рахунок неідеальності характеристик фільтрів відповідало б 8 %, а сумарне - 40 %. У цьому випадку кутові частоти зрізу й режекції, перетворених ідеальних фільтрів у реальні, які фізично можуть бути реалізовані, дорівнюють: 7 UA 73752 U 1зр 300 рад / с; 1реж 340 рад / с; н 285 рад / с; н 318 рад / с; в 424 рад / с; в 460 рад / с; 2реж 2зр 2зр 2реж н 410 рад / с; н 444 рад / с; в 520 рад / с; в 552 рад / с; 3реж 3зр 3зр 3реж н 510рад / с; н 542 рад / с; в 600 рад / с; в 636 рад / с; 4реж 4зр 4зр 4реж н н 626 рад / с; в 676 рад / с; в 590рад / с; 708 рад / с; 5реж 5зр 5зр 5реж , н 662 рад / с; н 698 рад / с; в 742 рад / с; в 774 рад / с; 6реж 6зр 6зр 6реж н 730 рад / с; н 762 рад / с; в 800 рад / с; в 832 рад / с; 7реж 7зр 7зр 7реж н н 823рад / с; в 857 рад / с; в 790 рад / с; 889рад / с; 8реж 8зр 8зр 8реж н 850 рад / с; н 878 рад / с; в 911 рад / с; в 939 рад / с 9реж 9зр 9зр 9реж н 902 рад / с; н 930 рад / с; в 960 рад / с; в 988 рад / с 10реж 10зр 10зр 10реж н н в в 952 рад / с; 980 рад / с; 1009 рад / с; 41036 рад / с 11реж 11зр 11зр 11реж 5 10 15 20 Методика розрахунків фільтрів у середовищі "Mathlab" наступна: 1. Вибираємо тип фільтра - цифровий фільтр з кінцевою імпульсною характеристикою. 2. Вибираємо форму амплітудно-частотної характеристики фільтра (фільтр нижніх частот або смуговий фільтр). 3. Відповідно до певних значень частот зрізу й частот режекції для кожного фільтра, кожної субсмуги за похилою дальністю по програмі розраховуємо порядок фільтрів і їх коефіцієнти. Для визначення порядку фільтра при вибраній формі його амплітудно-частотної характеристики використовуємо вікно "FDAtool" програми "Mathlab" (фіг. 10). Вводимо вибрані параметри фільтра, перераховані з кутових частот, які вимірюються у рад/с, у кругові, що вимірюються в Гц (1/с). Контролюємо отриману амплітудно-частотну характеристику фільтра у вікні "Magnitude Response" команди "Design Filter" (фіг. 11). Фіксуємо результати розрахунків коефіцієнтів фільтра, відкривши вікно з результатами розрахунку. Отримані коефіцієнти, число яких дорівнює порядку фільтрів, використовуються в алгоритмах реалізації цифрових фільтрів. Сформовані сигнали з виходу вирівнювача фронту хвилі подають у блок коректора фази. У процесі обробки траєкторних сигналів імітація руху радіолокаційної станції із синтезованою апертурою по віртуальній траєкторії синтезування здійснюється шляхом корекції фази прийнятого сигналу від субсмуги за похилою дальністю. Визначимо величину цієї фазової корекції в залежності від кута синтезування у, (фіг. 12). Відстань до віртуальної траєкторії синтезування від лінії заданого шляху дорівнює r ODmk OM Mrm , T Dmk rm , T rm m rm cos T 25 (22) При малих кутах синтезування 2 rm 2rm T rm 4 2 T , 2 (24) А величина фазової корекції становить k 4 2 rm rm 2 , T (25) 30 8 2rm sin 2 T 2 , cos T (23) UA 73752 U 5 10 15 20 Сигнали кожного відліку усереднених доданків часткових сум кожного каналу дальності множаться на опорну функцію hm, k одиничної амплітуди та фази, що визначена співвідношенням (25) для кожного відліку k кожного каналу похилої дальності m. З виходу коректора фази (формувача вимірів на віртуальних дугових траєкторіях синтезування) сигнали синфазного і квадратурного каналів подаються на входи процесорів швидкого перетворення Фур'є, де по дискретних сигналах від кожної із субсмуг за похилою дальністю обчислюється її дискретний спектр. Ці спектри є синфазною й квадратурною складовою функції відбиття субсмуг каналів похилої дальності. З виходу процесорів швидкого перетворення Фур'є сигнали синфазної й квадратурної доданків радіолокаційного зображення субсмуг кадру за похилою дальністю подаються в блок обчислення модуля комплексних чисел 29. Результати обчислень із виходу блока подають на блок цифрової системи індикації 30, який перетворює числову матрицю, що відповідає парціальному кадру, у його візуальне зображення. Пропонований спосіб цифрової системи обробки вдосконалює метод гармонійного аналізу, вибраний як прототип, у тому розумінні, що знімає структурні обмеження на дальність дії радіолокаційної станції із синтезованою апертурою при його використанні, які обумовлені сферичністю фронту хвилі зондуючого сигналу. Платою за це є збільшення часу обробки траєкторних сигналів. Але це збільшення часу обробки при певних вимогах до дальності дії й розрізняльної здатності може бути компромісом між оперативністю ведення розвідки, розрізняльною здатністю, дальністю дії та шириною смуги спостереження. Оцінка основних характеристик покадрової радіолокаційної станції із синтезованою апертурою для розглянутого прикладу реалізації способу в порівнянні із прототипом представлено в таблицях 1 і 2, а в порівнянні із кращим аналогом у табл. 3 і 4. Таблиця 1 Об'єкт Цифрова система обробки радіолокаційної станції із синтезованою апертурою, що заявляється (режим дальньої розвідки) Цифрова система обробки прототипу tф/к tШПФ рядку R (км) мс (мкс) ΔRmах (км) x ' x r ' r R' R 1 1 2,9 69,5 31 4,5 11 1,5 1 1 0,35 24 31 24-Нл-ка ряд tФК рядку (мкс) р.час 25 Таблиця 2 Об'єкт Цифрова система обробки радіолокаційної станції із синтезованою апертурою, що заявляється (режим ближньої розвідки) Цифрова система обробки прототипу tф/к tШПФ рядку мс (мкс) ΔRmах (км) x ' x r ' r R' R R (км) 1 1 1,54 37 15,5 1,2 5,6 2,9 1 1 0,65 24 15,5 24-Нл-ка 9 ряд tФК рядку (мкс) р.час UA 73752 U Таблиця 3 Об'єкт Цифрова система обробки радіолокаційної станції із синтезованою апертурою, що заявляється (режим дальньої розвідки) Цифрова система обробки радіолокаційної станції із синтезованою апертурою аналога x ' x r ' r t' ˆá i t ˆá i tФК tШПФ tф/к tУФ R' R мкс ряд мкс ряд мс ряд мс ряд 1 1 1 3 11 31 4,5 1,5 1 1 1 0,32 2,88 11 0,504 ΔRmах р.час (км) Таблиця 4 Об'єкт Цифрова система обробки радіолокаційної станції із синтезованою апертурою, що заявляється (режим ближньої розвідки) Цифрова система обробки радіолокаційної станції із синтезованою апертурою аналога 5 10 15 20 25 tФК tШПФ tф/к tУФ t ˆá i мкс ряд мкс ряд мс ряд мс ряд 1 2,95 5,6 15,5 1,2 2,9 1 0,34 0,82 2,78 0,97 x ' x r ' r R' R t' ˆá i 1 1 1 1 ΔRmах р.час (км) У таблицях для оцінки параметрів використані наступні позначення: δx, δr - розрізняльна здатність за шляховою та похилою дальністю відповідно; R - дальність дії; tШПФ - час обчислення швидкого перетворення Фур'є для одного каналу похилої дальності; tф/к - середній час, який витрачається на фільтрацію й компонування, у каналі похилої дальності; tУФ - час узгодженої фільтрації для одного рядка радіолокаційного зображення; ΔRmах р.час - максимально можлива смуга спостереження в реальному масштабі часу; tΣобч - середній сумарний час для обчислення рядка радіолокаційного зображення. У табл. 1-4 при розрахунках прийнято: 1. Якщо при збільшенні параметра характеристики поліпшуються, то параметр об'єкта, з яким проводиться порівняння, є знаменником, а якщо при зменшенні параметра характеристики об'єкта поліпшуються, то параметр об'єкта, з яким проводиться порівняння, є чисельником. 2. Уся цифрова обробка проводиться за допомогою одного універсального сучасного процесора типу AMD FX-8150 3,6 Hz 16Mb 8-ядерного. 3. Число тактів на операцію множення 32 (у сучасних процесорів 30-50), а операцію додавання 8 (5-10) /6/. 4. Середня кількість відліків на фільтр в розглянутому прикладі дорівнює 74 (порядок фільтрів коливається від 58 до 85). Джерела інформації: 1. Кондратенков Г.С. Радиолокационные станции воздушной разведки / Г.С. Кондратенков. К.: Воениздат, 1983. - 152 с. 2. Патент № 92116. Україна. МПК G01S13/90. Спосіб синтезування апертури РЛС бічного огляду й пристрій для його здійснення / Федотов Б.М., Станкевич С.А., Пономаренко С.О.; Заявник та власник патенту Державний науково-дослідний інститут авіації. - № а200907223; заявл. 10.07.09; опубл. 27.09.10, Бюл. № 18. 10 UA 73752 U 5 10 3. Радиолокационные станции с цифровим синтезированием апертури антенны / [В.Н. Антипов, В.Т. Горяинов, А.Н. Кулин и др.]; Под ред. В.Т. Горяинова. - М.: Радио и связь, 1988 304 с. 4. Федотов Б.М. Фундаментальні й структурні проблеми досягнення розрізненої здатності одиниць і часток метра в космічних радіолокаційних станціях із синтезуванням апертури / Б.Н. Федотов // Збірник наукових праць Житомирського військового інституту радіоелектроніки ім. С.П. Корольова. - 2007. - № 11. - С. 97-104. 5. Федотов Б.М. Факторы, определяющие расширение диаграммы направленности радиолокатора с синтезируемой апертурой, и оценка их совместного влияния на разрешающую способность / Б.М. Федотов, О.О. Слюсарчук // Збірник наукових праць Харківського університету Повітряних сил. - 2011. - № 1 (27). - С. 111-115. 6. Засоби ресурсної підтримки. Технічні характеристики процесора. www.ecocyb.narod.ru. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 1. Спосіб цифрової обробки траєкторних сигналів радіолокаційної станції з покадровим синтезуванням апертури антени, який полягає в тому, що прийняті, попередньо оброблені, виміряні, дискретизовані і оцифровані траєкторні сигнали розділяють на канали похилої дальності, усереднюють сигнали в кожному каналі зі зважуванням на лінійному інтервалі, який менше гранично припустимого, записують усереднені сигнали у пристрій пам'яті середніх значень доданків часткових сум, зважених цифрових сигналів, коректують фазу кожного усередненого значення траєкторних сигналів, за допомогою пристрою пам'яті опорних функцій та пристроїв множення, додавання та віднімання, записують скоректовані сигнали в пам'ять процесорів швидкого перетворення Фур'є, формують дискретний спектр траєкторних сигналів за допомогою пристроїв швидкого перетворення Фур'є, записують сформований дискретний спектр в пам'ять цифрової системи відображення та формують візуальне радіолокаційне зображення функції відбиття у вигляді парціальних кадрів, який відрізняється тим, що усереднюють оцифровані сигнали на лінійному інтервалі дискретизації, близькому до максимально допустимого без зважування і, перед виконанням операції фазової корекції розділяють записані сигнали з пристроїв пам'яті усереднених значень траєкторних сигналів по частотних піддіапазонах їх спектра за допомогою цифрових фільтрів, записують розділені дискретні сигнали каналів похилої дальності в пристрої пам'яті результатів фільтрації і компонують розділені за частотними піддіапазонами частини сигналів сусідніх каналів за похилою дальністю, штучно синтезуючи відбиті сигнали від прямокутних елементів каналів похилої дальності, які по ширині дорівнюють розрізняльній здатності за похилою дальністю, а їх довжина дорівнює лінійному розміру ширини діаграми спрямованості на дальності відповідного каналу за похилою дальністю. 2. Спосіб за п. 1, який відрізняється тим, що число частотних піддіапазонів Nm , на які j розділяють спектр відбитого сигналу m -го каналу похилої дальності, визначається шириною діаграми спрямованості передавальної антени в горизонтальній площині 0 , дальністю rm до субсмуги й розрізняльною здатністю r по формулі: 2 m rm 0 . N j 4r 45 3. Спосіб за пп. 1, 2, який відрізняється тим, що ширина частотних піддіапазонів кожного m-го каналу дальності дорівнює rm r n n 1 , де n 1, 2, ... Nm ; j n 1rmr H n nrmr B - верхня частота зрізу n-го фільтра; n - нижня частота зрізу n-го фільтра. 4. Спосіб за пп. 1-3, який відрізняється тим, що синтез сигналу відбиття від прямокутних елементів m-го каналу дальності здійснюють по наступному алгоритму: 50 amk Nm j b m n 1k , n 1 де аmk - синтезоване значення сигналу відбиття від m-ої прямокутної субсмуги зондування (m-го каналу дальності) в k-тій точці інтервалу синтезування; 11 UA 73752 U b m n 1k - сигнал n-го фільтра при поділі k-го дискретного виміру m n 1 -го каналу дальності; n - номер частотного піддіапазону при поділі дискретних вимірів в каналі похилої дальності; Nm - число піддіапазонів поділу спектра сигналу в m-му каналі похилої дальності. j 12 UA 73752 U 13 UA 73752 U 14 UA 73752 U 15 UA 73752 U 16 UA 73752 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 17
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for digital processing of radar trajectory signals with frame-by-frame synthesis of aperture
Автори англійськоюFedotov Borys Mykytovych, Sliusarchuk Oleksandr Oleksandrovych
Назва патенту російськоюСпособ цифровой обработки траекторных сигналов локатора с покадровым синтезированием апертуры
Автори російськоюФедотов Борис Никитович, Слюсарчук Александр Александрович
МПК / Мітки
МПК: G06F 7/00, G01S 13/90, G06F 15/00
Мітки: сигналів, спосіб, покадровим, цифрової, синтезуванням, траєкторних, локатора, обробки, апертури
Код посилання
<a href="https://ua.patents.su/19-73752-sposib-cifrovo-obrobki-traehktornikh-signaliv-lokatora-z-pokadrovim-sintezuvannyam-aperturi.html" target="_blank" rel="follow" title="База патентів України">Спосіб цифрової обробки траєкторних сигналів локатора з покадровим синтезуванням апертури</a>
Об’єднавчий модуль цифрової обробки сигналів
Номер патенту: 38235
Опубліковано: 25.12.2008
Автори: Шацман Леонід Георгієвич, Нікітін Микола Михайлович, Малащук Володимир Петрович, Гриценко Віктор Миколайович, Волощук Ігор Вікторович, Слюсар Вадим Іванович, Бондаренко Максим Васильович
МПК: G01S 13/00, G01S 7/00
Мітки: сигналів, цифрової, об'єднавчий, модуль, обробки
Формула / Реферат:
1. Об'єднавчий модуль цифрової обробки сигналів, який містить сигнальні входи, вхід зовнішньої синхронізації, внутрішній тактовий генератор, комутатор тактових сигналів (з внутрішнього тактового генератора та входу зовнішньої синхронізації), модулі оперативної пам'яті, постійний запам'ятовуючий пристрій, інтерфейсна шина, програмована логічна інтегральна схема (ПЛІС), в якій містяться модуль перетворення послідовного коду у паралельний,...
Система обробки сигналів приймальної цифрової антенної решітки
Номер патенту: 47675
Опубліковано: 25.02.2010
Автори: Гриценко Віктор Миколайович, Нікітін Микола Михайлович, Шацман Леонід Георгієвич, Волощук Ігор Вікторович, Бондаренко Максим Васильович, Слюсар Вадим Іванович, Малащук Володимир Петрович
МПК: G01S 7/00, H02K 15/00, G01S 13/00
Мітки: решітки, система, обробки, сигналів, цифрової, антенної, приймальної
Формула / Реферат:
1. Система обробки сигналів приймальної цифрової антенної решітки, до складу якої входять багатоканальні цифрові приймальні модулі (БЦПМ), об'єднавчий модуль, синхронізатор, процесорний модуль, перша об'єднавча (крос) плата, причому вихідна шина об'єднавчого модуля через рознім першої об'єднавчої (крос) плати підключені до шини даних процесорного модуля, тактові виходи синхронізатора підключені до тактових входів модулів БЦПМ та об'єднавчого...
Спосіб синтезування апертури рлс бокового огляду і пристрій для його здійснення
Номер патенту: 92116
Опубліковано: 27.09.2010
Автори: Федотов Борис Микитович, Пономаренко Сергій Олексійович, Станкевич Сергій Арсенійович
МПК: G01S 13/90
Мітки: огляду, здійснення, бокового, спосіб, синтезування, пристрій, рлс, апертури
Формула / Реферат:
1. Спосіб синтезування апертури радіолокаційних станцій бокового огляду, який полягає в тому, що формують і випромінюють зондувальні сигнали, приймають відбиті сигнали, роблять виміри і дискретизацію відбитих сигналів, корекцію фази відбитих сигналів у кожному елементі розрізнення по похилій дальності , здійснюють запам'ятовування обмірюваного відбитого сигналу, його...
Пристрій узгодженої обробки сигналів з псевдохаотичною частотною маніпуляцією
Номер патенту: 64170
Опубліковано: 25.10.2011
Автори: Таршин Володимир Анатолійович, Дорошко Ігор Миколайович, Ященко Олександр Вікторович, Васильєв Вадим Анатолійович
МПК: G01S 13/26
Мітки: обробки, маніпуляцією, частотною, узгодженої, псевдохаотичною, сигналів, пристрій
Формула / Реферат:
Пристрій узгодженої обробки сигналів з псевдохаотичною частотною маніпуляцією, що містить лінію затримки з М виходами, які з'єднані з входами блока фільтрів парціальних імпульсів, виходи якого з'єднані з входами суматора, який відрізняється тим, що між виходами лінії затримки і входами блока фільтрів парціальних імпульсів введений електронний комутатор, вхід керування якого з'єднаний з виходом пристрою формування кодової послідовності, на...
Спосіб ідентифікації цифрової апаратури запису аналогових сигналів та перевірки автентичності цифрових сигналограм
Номер патенту: 54627
Опубліковано: 17.03.2003
Автори: Мовчан Тетяна Вікторівна, Кирюша Богдан Анатолійович, Орлов Юрій Юрійович, Жаріков Юрій Федорович, Геранін Всеволод Олександрович, Писаренко Леонід Дмитрович, Рибальський Олег Володимирович
МПК: G11B 27/36, G11B 27/00
Мітки: запису, перевірки, апаратури, аналогових, цифрової, сигналів, ідентифікації, спосіб, автентичності, цифрових, сигналограм
Формула / Реферат:
1. Спосіб ідентифікації апаратури цифрового запису аналогових сигналів та перевірки автентичності цифрових сигналограм, заснований на порівнянні параметрів сигналів, що відтворюють в аналоговій формі з зразкової та досліджуваної цифрових сигналограм при їх попередньому підсиленні лінійним підсилювачем до максимального рівня, при якому не виникає амплітудних обмежень у сигналах, що підсилюються, та пропусканні підсилених сигналів через фільтр...
Попередній патент: Завантажувальна цапфа барабанного млина
Наступний патент: Архітрав гідравлічного преса
Випадковий патент: Оптико-електронний пристрій для аерофотозйомки