Лазерна інформаційно-вимірювальна система
Формула / Реферат
Лазерна інформаційно-вимірювальна система, що містить приймач-передавач (ПРМ-ПРД), пристрій формування каналів, пристрій формування сигналів, пристрій формування сигналів похибки, виконавчі механізми по кутах азимута і місця та вимірювальні канали похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', яка відрізняється тим, що додатково після ПРМ-ПРД введений інформаційний блок.
Текст
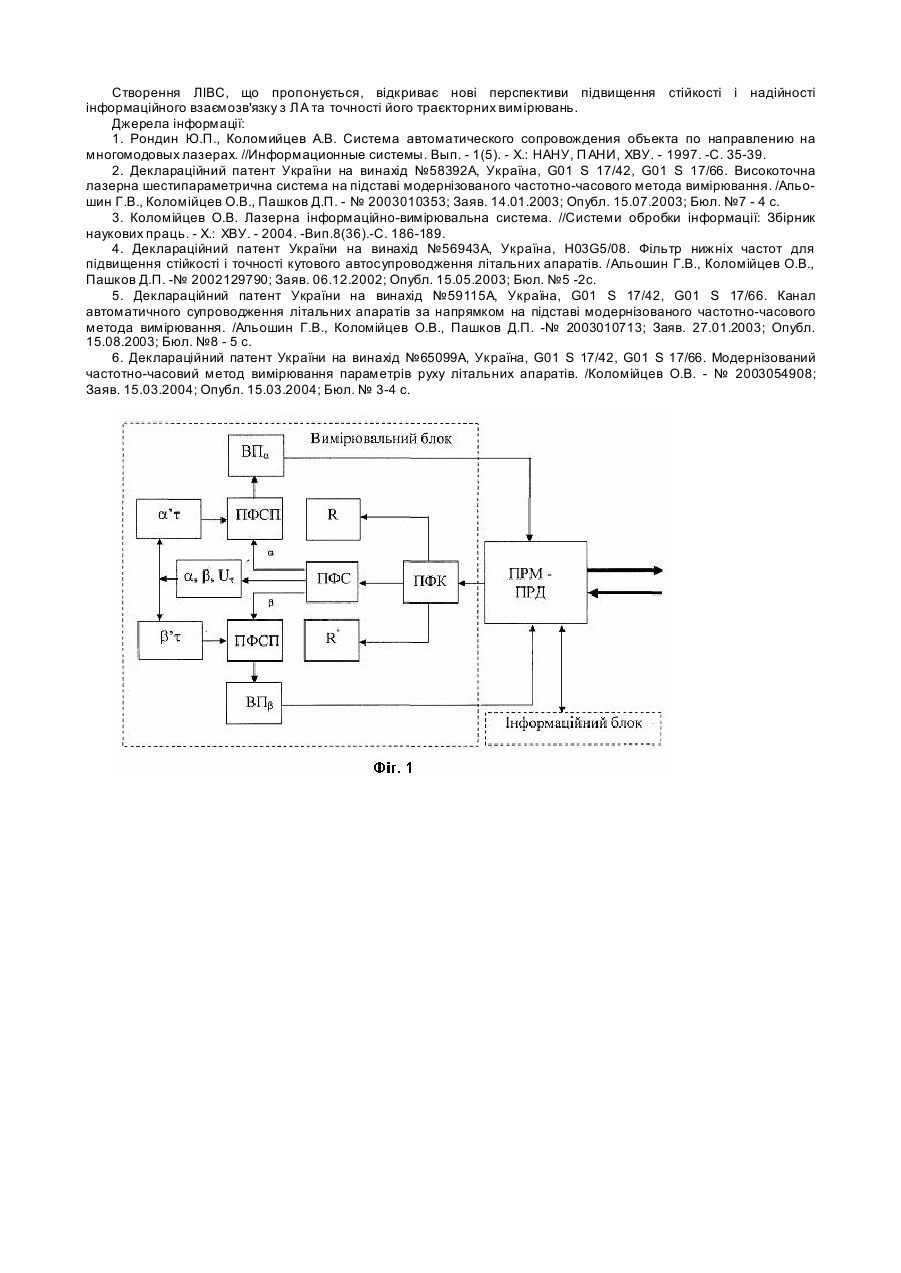
Запропонована корисна модель відноситься до галузі лазерних систем і може бути використана для побудови лазерної інформаційно-вимірювальної системи (ЛІВС) з забезпеченням високих точностних характеристик вимірювання параметрів руху (ВПР) і стійкого кутового автосупроводження літального апарата (ЛА) та інформаційної взаємодії з ним за умовами використання модернізованого частотно-часового методу (МЧЧМ) вимірювання. Відома «Система автоматичного супроводження ЛА за напрямком на багатомодових лазерах» [1], яка містить лазер, блок лазерної накачки, селектор подовжніх мод, передаючу оптику, прийомну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння, пристрій сигналу похибки, виконавчій пристрій та канали вимірювання похилої дальності R і радіальної швидкості R'. Система може забезпечити автосупроводження ЛА за напрямком (АСН) при одночасному вимірюванні R, R' та кутів азимута і місця. Недоліком відомої системи є те, що вона не вимірює кутову швидкість ЛА і не використовує її для підвищення астатизму каналу АСН, а також не використовує низькочастотну фільтрацію приймаємих сигналів в каналі АСН. Найбільш близьким до запропонованого технічним рішенням є «Високоточна лазерна шестипараметрична система на підставі модернізованого частотно-часового метода вимірювання» [2], яка містить приймальнопередавач (ПРМ-ПРД), пристрій формування каналів (ПФК), пристрій формування сигналів (ПФС), пристрій формування сигналів похибки (ПФСП), виконавчі механізми (ВМ) по кутах азимута і місця та вимірювальні канали похилої дальності R, радіальної швидкості R', кутів азимута a і міста b та кутови х швидкостей a' і b'. Недоліком системи-найближчого аналога є те, що вона не здійснює інформаційної взаємодії з ЛА, а лише вимірює його параметри руху. В основу корисної моделі поставлена задача створити лазерну інформаційно-вимірювальну систему, яка дозволить здійснювати інформаційну взаємодію з ЛА та при його стійкому кутовому автосупроводженні одночасно вимірювати похилу дальність R, радіальну швидкість R', кути азимута a і місця b, та кутові швидкості a', b' у широкому діапазоні дальностей, починаючи з початкового моменту польоту ЛА. Поставлена задача вирішується за рахунок того, що в систему-найближчий аналог додатково введено інформаційний блок [3]. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у тому, що лазерна інформаційно-вимірювальна система дозволить здійснювати інформаційну взаємодію з ЛА при точному і стійкому кутовому автосупроводженні ЛА та одночасний високоточний вимір похилої дальності R, радіальної швидкості R', кутів азимута a і міста b та кутових швидкостей a' і b' у широкому діапазоні дальностей, починаючи з початкового моменту польоту ЛА [3-6]. На фігурі приведена узагальнена структурна схема запропонованої лазерної інформаційно-вимірювальної системи. Запропонована лазерна інформаційно-вимірювальна система містить приймально-передавач (ПРМ-ПРД), вимірювальний блок (ВБ), який складається з пристрою формування каналів (ПФК), пристрою формування сигналів (ПФС), пристрою формування сигналів похибки (ПФСП), виконуючих механізмів (ВМ) по кутах азимута і місця та вимірювальні канали похилої дальності R, радіальної швидкості R', кутів азимута a і місця b та кутови х швидкостей a' і b', а також інформаційний блок (ІБ). Робота лазерної інформаційно-вимірювальної системи полягає в наступному. Приймально-передаючий канал ЛІВС формує зондуючи сигнали та РСН на ЛА завдяки використання МЧЧМ вимірювання [6]. Формування інформаційного і зондуючих сигналів та РСН здійснюється завдяки тому, що із одномодового багаточастотного синхронізованого спектра випромінювання лазера за допомогою СПМ виділяються необхідні пари частот для створення каналу зв'язку («підфарбованого» різницевою частотою міжмодових биттів 9Dn м ) і РСН завдяки формуванню сумарної ДС у виді 4-х частково перетина-ючихся парціальних ДС («підфарбованих» різницевими частотами міжмодових биттів: Dn м ; 2Dn м ; 3Dn м ; 6Dn м ), що попарно зустрічне сканують у кожній із двох ортогональних площин. Створення РСН, яке проходить через ЛА, дозволяє сформувати канал зв'язку між ПРМ-ПРД ЛІВС та ПРМПРД ЛА. Сигнали зв'язку з інформаційного блоку через ПРМ-ПРД ЛІВС проходять вдовж РСН, чим забезпечують інформаційну взаємодію між ЛІВС і ЛА, та приймаються ПРМ-ПРД ЛА і у зворотному чині. Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин, приводить до зрушення огинаючих періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування (похибки по кутам), а також зміну тривалості огинаючих пачок імпульсів частот міжмодових биттів за неповний прохід ДС у прямому чи зворотному напрямку сканування відбитого сигналу від ЛА (похибки по кутовим швидкостям), який приймається ПРМ-ПРД каналом. Пристрій для формування каналів розподіляє сигнали похибок по вимірювальним каналам. Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин не заважає вимірювати як похилу дальність до ЛА по запізнюванню частот міжмодових биттів каналом R, так і його радіальну швидкість допплерівським методом каналом R', оскільки найкращий режим сканування - при напівперекритті ДС. Сигнали у пристрої формування сигналів, які отримані від зустрічного сканування пар парціальних ДС у кожній із двох ортогональних площин перетворюються завдяки зрушенням огинаючих періодів пачок імпульсів частот міжмодових биттів, у сигнали кутів азимута a і місця b та перетворюються, завдяки зрушенням напівперіодів (тривалостей) огинаючих пачок імпульсів частот міжмодових биттів за один прохід ДС в одному напрямку сканування (прямому чи зворотному), у сигнали кутової (тангенціальної) складової швидкості ЛА у каналі кутови х швидкостей. По зрушенням огинаючих періодів пачок імпульсів частот міжмодових биттів у пристроях формування сигналів похибки (ПФСП - по кута х азимута a і місця b), формуються сигнали похибки по кутових координатах, що корегуються прогнозованими динамічними похибками, які через виконавчі механізми (ВМ - по кутах азимута a і місця b) розвертають ПРМ-ПРД таким чином, щоб РСН постійно проходив через ЛА. Надійний інформаційний зв'язок між ЛІВС і ЛА забезпечується завдяки стійкого кутового автосупроводження ЛА [4, 5]. Створення ЛІВС, що пропонується, відкриває нові перспективи підвищення стійкості і надійності інформаційного взаємозв'язку з ЛА та точності його траєкторних вимірювань. Джерела інформації: 1. Рондин Ю.П., Коломийцев А.В. Система автоматического сопровождения объекта по направлению на многомодовых лазерах. //Информационные системы. Вып. - 1(5). - X.: НАНУ, П АНИ, ХВУ. - 1997. -С. 35-39. 2. Деклараційний патент України на винахід №58392А, Україна, G01 S 17/42, G01 S 17/66. Високоточна лазерна шестипараметрична система на підставі модернізованого частотно-часового метода вимірювання. /Альошин Г.В., Коломійцев О.В., Пашков Д.П. - № 2003010353; Заяв. 14.01.2003; Опубл. 15.07.2003; Бюл. №7 - 4 с. 3. Коломійцев О.В. Лазерна інформаційно-вимірювальна система. //Системи обробки інформації: Збірник наукових праць. - X.: ХВУ. - 2004. -Вип.8(36).-С. 186-189. 4. Деклараційний патент України на винахід №56943А, Україна, H03G5/08. Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів. /Альошин Г.В., Коломійцев О.В., Пашков Д.П. -№ 2002129790; Заяв. 06.12.2002; Опубл. 15.05.2003; Бюл. №5 -2с. 5. Деклараційний патент України на винахід №59115А, Україна, G01 S 17/42, G01 S 17/66. Канал автоматичного супроводження літальних апаратів за напрямком на підставі модернізованого частотно-часового метода вимірювання. /Альошин Г.В., Коломійцев О.В., Пашков Д.П. -№ 2003010713; Заяв. 27.01.2003; Опубл. 15.08.2003; Бюл. №8 - 5 с. 6. Деклараційний патент України на винахід №65099А, Україна, G01 S 17/42, G01 S 17/66. Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів. /Коломійцев О.В. - № 2003054908; Заяв. 15.03.2004; Опубл. 15.03.2004; Бюл. № 3-4 с.
ДивитисяДодаткова інформація
Назва патенту англійськоюLaser information-measurement system
Автори англійськоюKolomiitsev Oleksii Volodymyrovych
Назва патенту російськоюЛазерная информационно-измерительная система
Автори російськоюКоломийцев Алексей Владимирович
МПК / Мітки
МПК: G01S 17/42, G01S 17/66
Мітки: система, інформаційно-вимірювальна, лазерна
Код посилання
<a href="https://ua.patents.su/2-23214-lazerna-informacijjno-vimiryuvalna-sistema.html" target="_blank" rel="follow" title="База патентів України">Лазерна інформаційно-вимірювальна система</a>
Інформаційно-вимірювальна система обліку витрат газу
Номер патенту: 53539
Опубліковано: 15.01.2003
Автори: Бестелесний Андрій Григорович, Петришин Ігор Степанович
МПК: G01F 22/00, G01F 13/00, G01F 3/00
Мітки: обліку, система, витрат, газу, інформаційно-вимірювальна
Формула / Реферат:
Інформаційно-вимірювальна система обліку витрат газу, що містить лічильник газу і обчислювач з вхідними каналами для вимірювання тиску та температури газу, яка відрізняється тим, що додатково містить вихідний редуктор та вхідний регулятор тиску, які утворюють разом з обчислювачем і лічильником за заданими алгоритмами систему керування зі зворотним зв'язком.
Накопичувальна інформаційно-вимірювальна система силової установки літального апарата
Номер патенту: 77215
Опубліковано: 15.11.2006
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G06F 15/00, F02C 9/28
Мітки: апарата, система, літального, силової, інформаційно-вимірювальна, установки, накопичувальна
Формула / Реферат:
Накопичувальна інформаційно-вимірювальна система силової установки літального апарата, що містить перший та другий блоки реєстрації параметрів, перший та другий блоки контролю одиночних сигналів, перший блок нормалі заторів, з'єднаний з першим блоком контролю датчиків та частоти і першим блоком перетворення постійної напруги та частоти в код, перший блок формувачів входом з'єднаний з першим блоком контролю датчиків та частоти і першим входом...
Накопичувальна інформаційно-вимірювальна система силової установки літального апарата
Номер патенту: 66241
Опубліковано: 16.01.2006
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G06F 15/00, F02C 9/28
Мітки: силової, інформаційно-вимірювальна, літального, накопичувальна, система, установки, апарата
Формула / Реферат:
Головка гайковерта містить з'єднаний із шпинделем гайковерта корпус, в наскрізному діаметральному пазу якого встановлений повзун. В аналогічному пазу, перпендикулярному до наскрізного діаметрального паза корпусу, рухомо розташована база гайки. Повзун має ще один, але наскрізний по осі паз. В осьовому і радіальному напрямках повзун підпружинений відносно корпусу, опирається на дно з осьовим отвором його втулки й утворює радіальний проміжок із...
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового метода вимірювання
Номер патенту: 58392
Опубліковано: 15.07.2003
Автори: Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Пашков Дмитро Павлович
МПК: G01S 17/42, G01S 17/66
Мітки: система, модернізованого, вимірювання, основі, шестипараметрична, високоточна, метода, лазерна, частотно-часового
Формула / Реферат:
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового методу вимірювання, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд (СП), фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимуту і місця, яка відрізняється тим, що додатково після СПМ...
Інформаційно-вимірювальна система

Номер патенту: 16876
Опубліковано: 29.08.1997
Автори: Копилов Леонід Миколайович, Ковтуненко Віктор Олексійович, Лукаш Віктор Михайлович, Векліч Олена Афанасівна
МПК: G06J 1/00, G06F 15/76
Мітки: інформаційно-вимірювальна, система
Формула / Реферат:
Информационно-измерительная система, содержащая электронно-вычислительную машину, генератор импульсов, блок питання, аналого-цифро-вой преобразователь, отличающаяся тем, что, с целью расширения области применения за счет повышения помехоустойчивости и точности измерений, в нее введены элемент И, формирователь импульсов, пять усилителей с гальваническим разделением, счетчик, дешифратор, делитель частоты, преобразователь напряжения, блок...
Попередній патент: Канал автоматичного супроводження літальних апаратів за напрямком для лазерної інформаційно-вимірювальної системи
Наступний патент: Селектор подовжніх мод для лазерної інформаційно-вимірювальної системи
Випадковий патент: Машина для шліфування зерна