Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового метода вимірювання
Номер патенту: 58392
Опубліковано: 15.07.2003
Автори: Пашков Дмитро Павлович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович
Формула / Реферат
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового методу вимірювання, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд (СП), фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимуту і місця, яка відрізняється тим, що додатково після СПМ послідовно введений блок дефлекторів, керування яким здійснюється введеними блоком керування дефлекторами та керуючим елементом, після фотодетектора послідовно введений широкосмуговий підсилювач (ШП), замість СП введені вимірювач затримки огинаючих для оцінки похибки по кутах з послідовно введеним каналом вимірювання кута азимуту ![]() (місця
(місця ![]() ) і вимірювач різниці тривалості півперіодів для оцінки похибок по кутових швидкостях з послідовно введеним каналом вимірювання похідної кута (тангенціальної швидкості) азимуту
) і вимірювач різниці тривалості півперіодів для оцінки похибок по кутових швидкостях з послідовно введеним каналом вимірювання похідної кута (тангенціальної швидкості) азимуту ![]() (місця
(місця ![]() ), які також підключені до фільтрів сигналів кутових похибок (підсилювачів сигналів похибок) відповідних кутів, а також додатково введені після ШП вимірювальні канали похилої дальності R та радіальної швидкості R'.
), які також підключені до фільтрів сигналів кутових похибок (підсилювачів сигналів похибок) відповідних кутів, а також додатково введені після ШП вимірювальні канали похилої дальності R та радіальної швидкості R'.
Текст
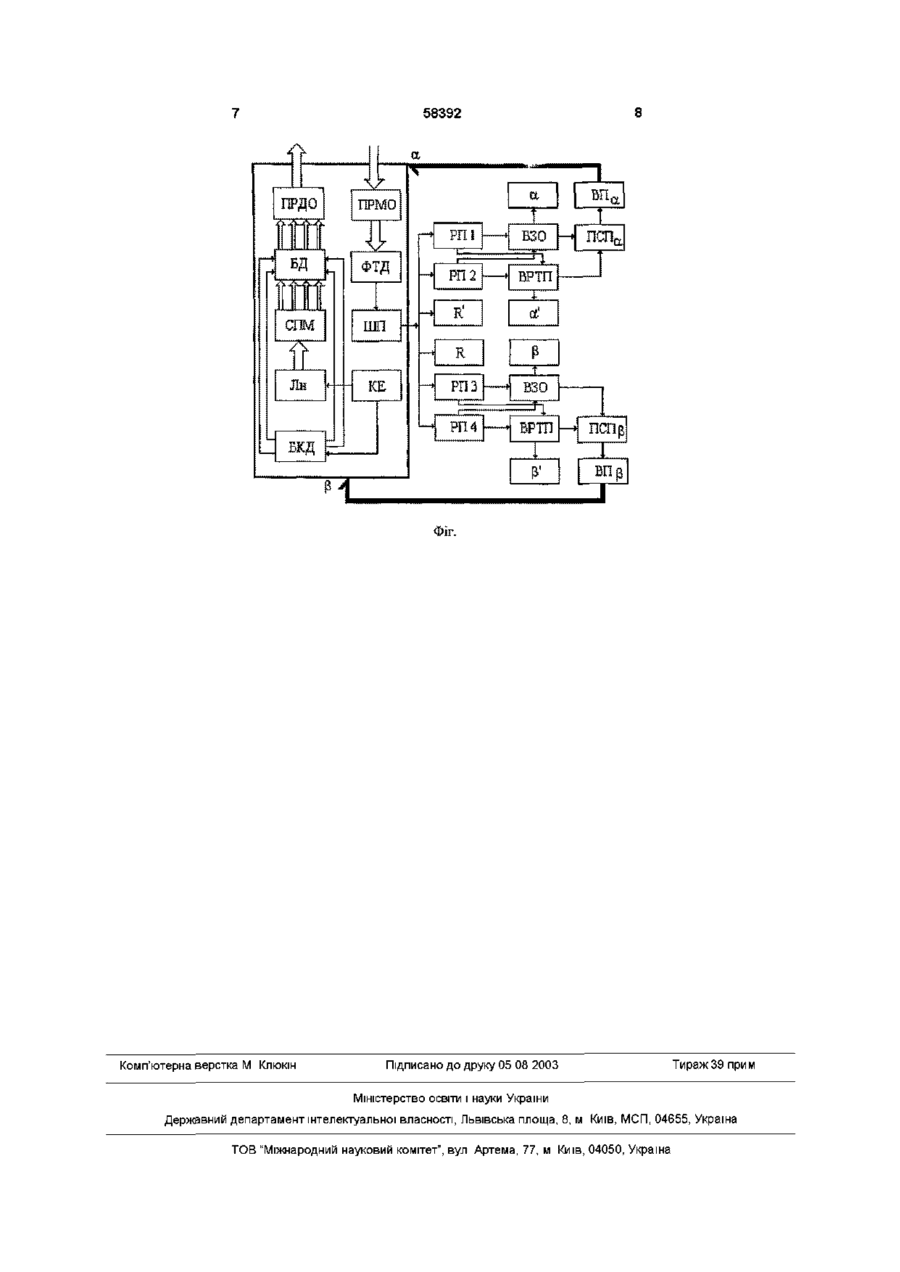
Високоточна лазерна шестипараметрична система на основі модернізованого частотночасового методу вимірювання, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд (СП), фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимуту і місця, яка відрізняється тим, що додатково після СПМ послі Запропонований винахід відноситься до галузі лазерних систем і може бути використаний для побудови лазерної шестипараметричної системи з забезпеченням високих точностних характеристик вимірювання параметрів руху (ВПР) і стійкого кутового автосупроводження літального апарата (ЛА) за умовами використання модернізованого частотно-часового методу (ЧЧМ) вимірювання та фільтра нижніх частот (ФНЧ) для підвищення СТІЙКОСТІ кутового автосупроводження ЛА у каналі автоматичного супроводження за напрямком (АСН) Відома квантово-оптична система «Сажень» [1], яка включає канали вимірювання похилої дальності R та кутів азимута а і міста [З У цієї системі забезпечується вимірювання похилої дальності, неоперативне вимірювання кутів азимута і міста по зіркам при супроводженні космічного апарату (КА) за програмою по телевізійним каналам Недоліками системи „Сажень" є мала точність по дальності на великій відстані до КА і по кутам, неоперативність супроводження та недостатня КІЛЬКІСТЬ ВПР КА Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є "Система довно введений блок дефлекторів, керування яким здійснюється введеними блоком керування дефлекторами та керуючим елементом, після фотодетектора послідовно введений широкосмуговий підсилювач (ШП), замість СП введені вимірювач затримки огинаючих для оцінки похибки по кутах з послідовно введеним каналом вимірювання кута азимуту а (місця р) і вимірювач різниці тривалості півперюдів для оцінки похибок по кутових швидкостях з послідовно введеним каналом вимірювання похідної кута (тангенціальної швидкості) азимуту а' (місця р1), які також підключені до фільтрів сигналів кутових похибок (підсилювачів сигналів похибок) ВІДПОВІДНИХ кутів, а також додатково введені після ШП вимірювальні канали похилої дальності RTa радіальної швидкості R' автоматичного супроводження ЛА за напрямком на багатомодових лазерах" [2], яка вміщує послідовно з'єднанні лазер з блоком лазерної накачки, селектор подовжніх мод (СПМ), передаючу оптику, а для приймання сигналу - прийомну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП), пристрій сигналу похибки, виконавчій пристрій та додатково може бути доповнена канали вимірювання похилої дальності R і радіальної швидкості R' Ця система може забезпечити автосупроводження ЛА за напрямком при одночасному вимірюванні R, R' та кутів а і [ З Робота системи-прототипу полягає в наступному Коли ЛА знаходиться на напрямку оптичної осі, амплітуди сигналів різниці частот, виділених фото детектором та резонансними підсилювачами, будуть однакові У випадку, коли ЛА зміщується відносно оптичної осі, різниця амплітуд сигналів різностних частот на виході фільтрів будуть майже пропорційна відхиленню Виходи фільтрів своїх кутових каналів з'єднані зі входами схем порівняння амплітуд діаграм спрямованості (ДС) азимутального і кутового каналів Виділені сигнали похибки цих каналів після їх підсилювання будуть о> со 00 ю 58392 поступати на виконавчі пристрої, які розвертають прийомо-передаючу платформу таким чином, щоб ЛА знаходився на оптичній осі системи В каналі вимірювання R, використовується фазовий метод Боротьба з неоднозначністю вимірювань здійснюється, завдяки використанню багато-шкального методу В каналі вимірювання R', використовується метод вимірювання на піднесучих позависоких частот Принцип дії каналу складається у тому, що основна частина зондуючого випромінювання лазера через антенну систему направляється в напрямку на ЛА, а маленька частина відводиться у бік фотоприймача опорного сигналу, де здійснюється виділення сигналу з частотою міжмодових биттів Кожна мода випромінювання, відбиваясь від катафоту ЛА, виміряє свою частоту на величину допплерівського зрушення, пропорційну швидкості ЛА Недоліком системи-прототипу є те, що вона не вимірює кутову швидкість ЛА, не використовує цю інформацію для підвищення СТІЙКОСТІ (астатизму) каналу АСН та не використовує низькочастотну фільтрацію приймаємих сигналів в каналі АСН При наявності шумових фотонів та флуктуаційних шумів в каналі АСН актуальною є задача оптимальної фільтрації слабих сигналів з великої дальності, що в прототипі немає В основу винаходу поставлена задача створити високоточну лазерну шестипараметричну систему на підставі модернізованого ЧЧМ вимірювання, яка завдяки використанню вимірювальної інформації від каналу кутових швидкостей та оптимальної низькочастотної фільтрації сигналів міжмодових биттів в каналі АСН дозволить здійснювати при стійкому кутовому автосупроводженні ЛА одночасний вимір похилої дальності R, радіальної швидкості R', кутів азимута а і міста [3, та кутових швидкостей а', [3' у широкому діапазоні дальностей, починаючи з початкового моменту польоту ЛА [3] Поставлена задача вирішується за рахунок того, що у відому систему-прототип [2] з метою додаткового вимірювання кутових швидкостей, підвищення СТІЙКОСТІ кутового автосупроводження та точності вимірювання похилої дальності, радіальної швидкості, кутів азимута і міста ЛА, додатково після СПМ послідовно введено блок дефлекторів, управління яким здійснюється введеними блоком управління дефлекторами та управляючим елементом, після фотодетектору послідовно введено широкосмуговий підсилювач (ШП), а замість СП введені вимірювач затримки огинаючих для оцінки похибки по кутах з послідовно введеним каналом вимірювання кута азимута а (міста (3) і вимірювач різниці тривалості полуперюдів для оцінки похибок по кутових швидкостях з послідовно введеним каналом вимірювання похідної кута азимута а' (міста [З') (тангенціальної швидкості), які також підключені до фільтрів сигналів кутових похибок (підсилювачів сигналів похибок) ВІДПОВІДНИХ кутів, а також додатково введено після ШП вимірювальні канали похилої дальності та радіальної швидкості Така розробка необхідно пов'язана з використанням модернізованого ЧЧМ вимірювання, перш за все, вимірювальної інформації по кутах та кутових швидкостях ЛА, які дозволяють підвисити аста тизм каналу АСН при оптимальній вузькосмугової фільтрації сигналу кутової похибки за критерієм мінімумом дисперсії похибки фільтрації [3] Суть модернізованого ЧЧМ вимірювання, полягає в тому, що із синхронізованого спектра випромінювання одномодового багаточастотного лазера за допомогою СПМ виділяються необхідні пари частот для "підфарбування" ДС, щоб створити рівносигнальний напрямок (РСН) у виді 4-х частково пе-ретинаючихся парціальних ДС («підфарбованих» різницевими частотами міжмодових биттів), які на відміну прототипу тепер попарно зустрічне сканують у кожній із двох ортогональних площин з заданим діапазоном сканування завдяки використання блока із 4-х п'єзоелектричних дефлекторів Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин приводить до зрушення огинаючих періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування Це зрушення дає похибки супроводження по кутам, а різниця в тривалості огинаючих - дає похибки кутових швидкостей Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин дозволяє вимірювати з високою точністю також дальність до ЛА по запізнюванню частот міжмодових биттів і його радіальну швидкість допплерівським методом, оскільки найкращий режим сканування забезпечується при напівперекритл ДС Високоточні вимірювання параметрів руху ЛА можливі завдяки формуванню стабільних ДС Інтерференційні провали згладжуються при обробці сигналів Оскільки ТОЧНІСТЬ вимірів визначається як крутістю огинаючих незалежно від методів вимірів різниці зрушення періодів і їх різностей, так і шириною смуги фільтру, то використовується вузькосмугова фільтрація сигналу як на різницевих частотах міжмодових биттів, так і оптимальна фільтрація на нижчих частотах, що формують огинаючу [3] Реалізація високої точності ВПР ЛА не можлива без прецизійної антенно-поворотної системи Модернізований ЧЧМ вимірів припускає обробку результатів вимірів у цифровій формі Тому пропонується створити адаптивний пакет обробки інформації, цифрові астатичні адаптивні фільтри і засоби узгодження протоколів Технічний результат, який може бути отриманий при здійсненні винаходу полягає в тому, що з'явилась можливість вимірювати шість параметрів руху ЛА на підставі використання модернізованого ЧЧМ вимірювання, підвисити точність вимірювання похилої дальності R, радіальної швидкості R', кутів азимута а і міста [3 та кутових швидкостей а' і [3' у широкому діапазоні дальностей, починаючи з початкового моменту польоту ЛА та підвисити СТІЙКІСТЬ кутового автосупроводження ЛА для понадвузьких ДС На фіг приведена узагальнена структурна схема запропонованої високоточної лазерної шестипараметричної системи на підставі модернізованого ЧЧМ вимірювання Запропонована високоточна лазерна шестипараметрична система на підставі модернізованого ЧЧМ вимірювання включає КЕ - керуючий елемент, БКД - блок керування дефлекторами, Лн 58392 лазер з накачкою, СПМ - селектор подовжніх мод, БД - блок дефлекторів, ПРДО - передаючу оптику, ПРМО - прийомну оптику, ФТД - фотодетектор, ШП - широкосмуговий підсилювач, РП - резонансні підсилювачі настроєні на ВІДПОВІДНІ частоти міжмодових б и т в , ВЗО - вимірювачі затримки огинаючих, ВРТП - вимірювачі різниці тривалості полуперюдів, ПСП - підсилювачі (фільтри) сигналу похибки, ВП - виконавчі пристрої побудовані ВІДПОВІДНО кутів азимута і міста та вимірювальні канали похилої дальності R, радіальної швидкості R', кутів азимута а і міста [3 та кутових швидкостей а' і [З' Всі елементи узагальненої структурної схеми запропонованої системи виконані по відомим схемам [2, 3] Робота запропонованої високоточної лазерної шестипараметричної системи на підставі модернізованого ЧЧМ вимірювання полягає в наступному Зі синхронізованого одномодового багаточастотного спектра випромінювання YAG Nd 3+ - лазера (Лн) за допомогою СПМ виділяються необхідні пари частот для створення РСН завдяки формуванню сумарної ДС у виді 4-х частково перетинаючихся парціальних ДС («підфарбованих» різницевими частотами міжмодових б и т в ДУМ, 2ДУМ, ЗДУМ, 6ДУМ), що попарно зустрічне сканують у кожній із двох ортогональних площин блоком дефлекторів При цьому період сканування задається блоком керування дефлекторів, який разом з Лн забезпечується необхідним живленням від керуючого елемента Проходячи через передаючу оптику, лазерний імпульсний сигнал фокусується в скануєми крапки простору, оскільки здійснюється зустрічне сканування двома парами ДС у кожній із двох ортогональних площин (а і [3 чи X і У) Прийняті прийомною оптикою відбиті від ЛА в процесі сканування чотирьох ДС лазерні імпульсні сигнали і огинаючи сигнали ДС за допомогою фотодетектора перетворяться в електричні імпульсні сигнали на різницевих частотах міжмодових биттів, посилювані широкосмуговим підсилювачем, і розподіляються по вимірювальним каналам похилої дальності і радіальної швидкості та резонансних підсилювачах (РУ1, РУ2, РУЗ, РУ4), побудованим на ВІДПОВІДНІ частоти ДУМ, 2ДУМ, ЗДУМ, 6ДУМ При цьому імпульсні сигнали радіочастоти, що надходять з 1РУДун і 2РУ2Дун - формують сигнал помилки по куту а, а ЗРУЗДун і 4РУ6Дун - по куту [З Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин, не заважає, вимірювати як похилу дальність до ЛА по запізнюванню частот міжмодових биттів каналом R, так і його радіальну швидкість допплерівським методом каналом R', оскільки найкращий режим сканування - при напівперекритті ДС Сигнали з РУ1 і РУ2 (РУЗ і РУ4), по-перше, перетворюються завдяки зрушенням огинаючих періодів пачок імпульсів частот міжмодових биттів в ВЗО, у сигнали кутів азимута а (місця (3) в вимірювальних каналах а ((3), а також у сигнали оцінки похибки по кутах, по-друге, перетворюються, завдяки зрушенням напівперюдів (тривалостей) огинаючих пачок імпульсів частот міжмодових биттів за один прохід ДС в одному напрямку сканування (прямому чи зворотному) в ВРТП, у сигнали кутової (тангенціальної) складової швидкості ЛА в вимірювальних каналах кутових швидкостей а' ([3'), a також у сигнали для оцінки похибок по кутових швидкостях Сформовані сигнали оцінок похибок по кутах і кутових швидкостях введені до фільтрів сигналів кутових похибок (ПСП) по ВІДПОВІДНИХ кутах, які корегуються прогнозованими динамічними похибками, що дозволить провести оптимальну низькочастотну фільтрацію сигналів та отримати уточнену величину і знак кута відхилення ЛА від РСН, які через ВП по кутах азимута а і місця [3 розвертають прийомо-передаючу платформу системи таким чином, щоб РСН постійно проходив через ЛА Створення пропонуємої високоточної лазерної шестипараметричної системи на підставі модернізованого ЧЧМ вимірювання відкриває нові перспективи підвищення точності як траєкторних вимірів при одночасному стійкому кутовому автосупроводженні ЛА, так і для інших промислових застосувань, наприклад, для програмно-цифрових автоматів обробки металу, тощо ДЖЕРЕЛА ІНФОРМАЦІЇ 1 С В Тюрін, 1С Шостко, В А Романюк, В В Пономарьов, Р В Павлович ПОЛІГОННІ лазерні та оптико-електронні вимірювальні засоби Конспект лекцій Частина II -X ХВУ -1998р -174с 2 Рондин Ю П , Коломийцев А В Система автоматического сопровождения объекта по направлению на многомодовых лазерах // Информационные системы Вып - 1(5) - X ПАНУ, ПАНИ, ХВУ -1997 -С 35-39 3 Алешин Г В , Рондин Ю П , Коломийцев А В Принципы построения лазерного канала углового автосопровождения объекта по направлению с частотно-временным методом измерений // Системи обробки інформації Вип 2(6) - X НАНУ, ПАНИ, ХВУ -1999 -С 104-107 58392 ФІг. Комп'ютерна верстка М Клюкш Підписано до друку 05 08 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюLaser system for determining six parameters characterizing motion of an aircraft by frequency and time measurements
Автори англійськоюAlioshyn Hennadii Vasyliovych, Kolomiitsev Oleksii Volodymyrovych, Pashkov Dmytro Pavlovych
Назва патенту російськоюЛазерная система для определения шести параметров движения летательного аппарата с помощью частотных и временных измерений
Автори російськоюАлешин Геннадий Васильевич, Коломийцев Алексей Владимирович, Пашков Дмитрий Павлович
МПК / Мітки
МПК: G01S 17/66, G01S 17/42
Мітки: система, метода, лазерна, основі, вимірювання, частотно-часового, високоточна, шестипараметрична, модернізованого
Код посилання
<a href="https://ua.patents.su/4-58392-visokotochna-lazerna-shestiparametrichna-sistema-na-osnovi-modernizovanogo-chastotno-chasovogo-metoda-vimiryuvannya.html" target="_blank" rel="follow" title="База патентів України">Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового метода вимірювання</a>
Пасивно-активна лазерна система прицілювання
Номер патенту: 48911
Опубліковано: 15.08.2002
Автори: Архипов Микола Іванович, Кравчук Ілля Степанович
МПК: F41G 1/00
Мітки: пасивно-активна, лазерна, прицілювання, система
Формула / Реферат:
1. Пасивно-активна лазерна система прицілювання, що містить окуляри нічного бачення, зброю і лазерний освітлювач, який закріплений на зброї, при цьому діапазон чутливості окулярів нічного бачення виконаний погодженим з діапазоном оптичного випромінювання лазерного освітлювача, яка відрізняється тим, що в систему додатково введені обчислювач сигналів випередження в горизонтальній і вертикальній площинах, гіроплатформа з карданним підвісом,...
Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 41466
Опубліковано: 17.09.2001
Автор: Черниш Станіслав Костянтинович
Мітки: система, джерел, випромінювання, координат, вимірювання, пасивна
Формула / Реферат:
Пасивна система вимірювання координат джерел випромінювання, що містить в собі декілька (як мінімум дві) просторово рознесених пеленгаторних станцій і центральний пост, з'єднаних двостороннім каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що введені додатково на кожну пеленгаторну станцію система єдиного часу (ЄЧ) і блок вимірювання періоду обертання антени (ВПОА), а в центральний пост введені додатково...
Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 43433
Опубліковано: 17.12.2001
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: випромінювання, система, джерел, вимірювання, координат, пасивна
Формула / Реферат:
Пасивна система вимірювання координат джерел випромінювання, що містить в собі декілька, як мінімум дві, просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв'язком з каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що в неї введені додатково на кожну пеленгаторну станцію лічильник, накопичуючий суматор, подільник, дешифратор, постійний запам'ятовуючий пристрій (ПЗП), схема...
Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 52632
Опубліковано: 15.01.2003
Автори: Єна Григорій Олександрович, Черниш Станіслав Костянтинович
МПК: G01S 5/04
Мітки: вимірювання, система, випромінювання, координат, пасивна, джерел
Формула / Реферат:
Пасивна система вимірювання координат джерел випромінювання, що містить щонайменше дві просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв'язком з каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що в неї додатково введені на кожну пеленгаторну станцію НВЧ комутатор, блок формування коду вхідних сигналів (БФКВС), блок формування цілі (БФЦ), дешифратор, постійний...
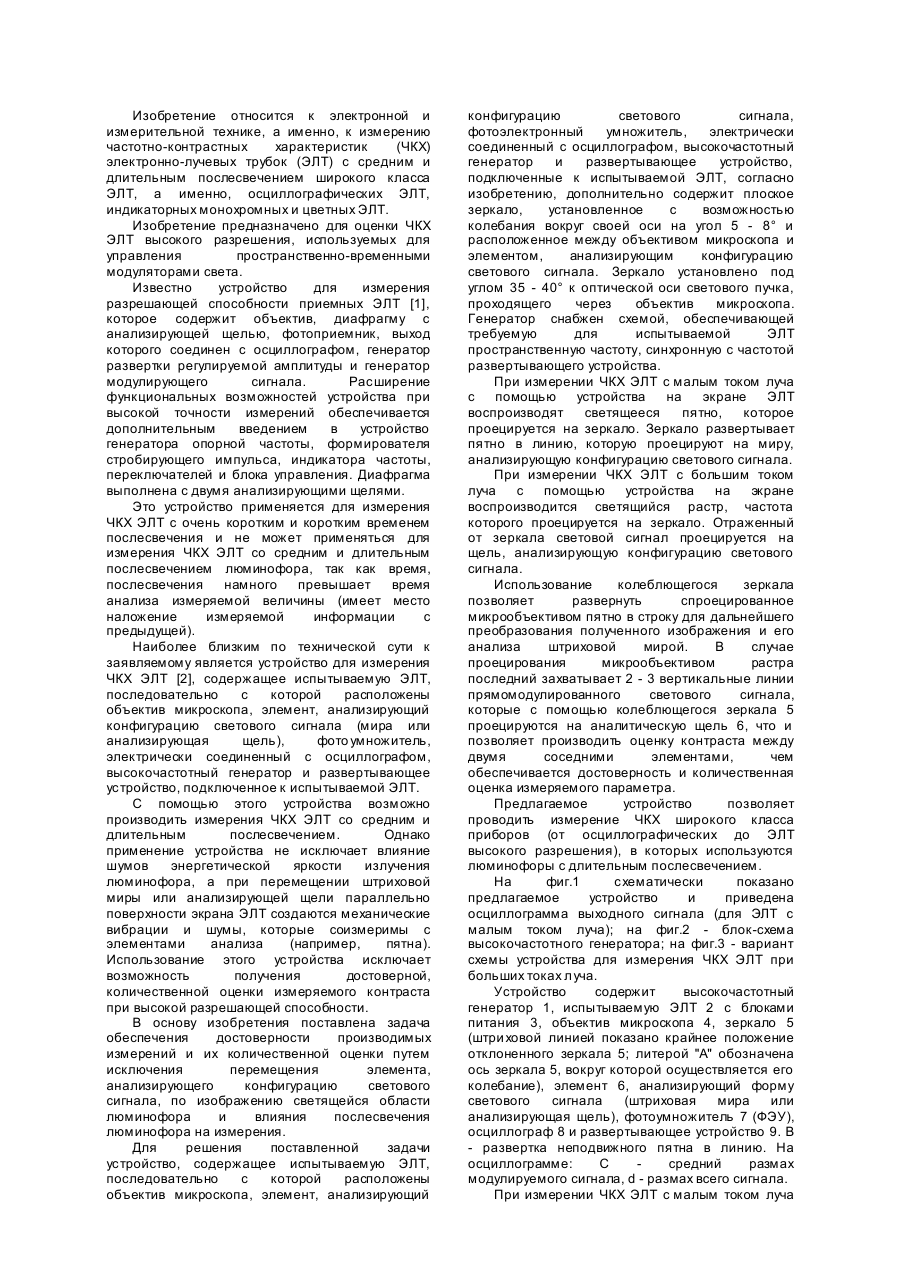
Пристрій для вимірювання частотно-контрастних характеристик електронно-променевих трубок з тривалим післясвітінням
Номер патенту: 18624
Опубліковано: 25.12.1997
Автори: Стецько Ігор Євгенович, Війтович Богдан Іванович, Дужий Теодозій Михайлович, Парадовський Богдан Петрович, Самолюк Олег Олексійович
МПК: H01J 31/00
Мітки: характеристик, тривалим, післясвітінням, трубок, частотно-контрастних, пристрій, вимірювання, електронно-променевих
Формула / Реферат:
1. Устройство для измерения частотно-контрастных характеристик электронно-лучевых трубок с длительным послесвечением, содержащее последовательно расположенные объектив микроскопа для фокусировки изображения с экрана испытываемой электронно-лучевой трубки, элемент, анализирующий конфигурацию светового сигнала, фотоэлектронный умножитель, электрически соединенный с осциллографом, высокочастотный генератор и устройство для развертки луча на...
Попередній патент: Спосіб спорудження глибинного підземного сховища для захоронення високорадіоактивних відходів
Наступний патент: Механотерапевтичний пристрій
Випадковий патент: Спосіб розкислення, модифікування та мікролегування рейкової сталі