Диференціатор сигналів систем автоматики неелектричного типу
Номер патенту: 31153
Опубліковано: 25.03.2008
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
Формула / Реферат
Диференціатор сигналів систем автоматики неелектричного типу, що містить підсумовуючий важіль, вузол приймання вхідних сигналів, з'єднаний через дросель з першим сильфоном перетворювача і безпосередньо - з другим сильфоном, жорстко з'єднаним з першим сильфоном через фланець, зв'язаний тягою з одним із кінців підсумовуючого важеля, а сильфони перетворювача і вузла приймання вхідних сигналів розміщені в циліндричних напрямних втулках, жорстко зв'язаних з нерухомими фланцями, другий сильфон перетворювача через рухомий фланець з'єднаний з середньою точкою підсумовуючого важеля, який відрізняється тим, що у другому сильфоні перетворювача встановлений додатковий нерухомий фланець з осьовим отвором і жорстким трубопроводом, з'єднаним з вузлом приймання вхідних сигналів.
Текст
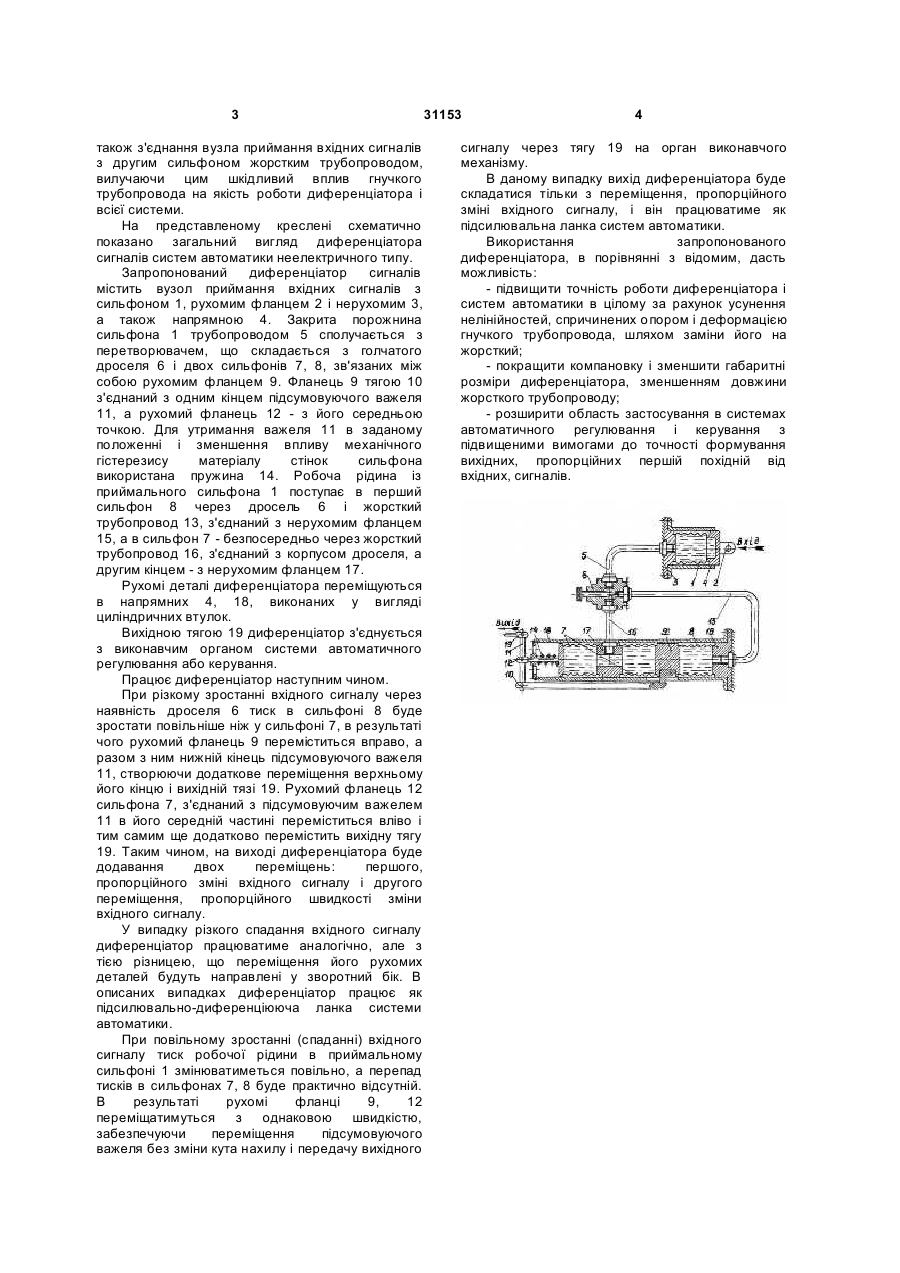
Диференціатор сигналів систем автоматики неелектричного типу, що містить підсумовуючий важіль, вузол приймання вхідних сигналів, з'єднаний через дросель з першим сильфоном перетворювача і безпосередньо - з другим 3 також з'єднання вузла приймання вхідних сигналів з другим сильфоном жорстким трубопроводом, вилучаючи цим шкідливий вплив гнучкого трубопровода на якість роботи диференціатора і всієї системи. На представленому креслені схематично показано загальний вигляд диференціатора сигналів систем автоматики неелектричного типу. Запропонований диференціатор сигналів містить вузол приймання вхідних сигналів з сильфоном 1, рухомим фланцем 2 і нерухомим 3, а також напрямною 4. Закрита порожнина сильфона 1 трубопроводом 5 сполучається з перетворювачем, що складається з голчатого дроселя 6 і двох сильфонів 7, 8, зв'язаних між собою рухомим фланцем 9. Фланець 9 тягою 10 з'єднаний з одним кінцем підсумовуючого важеля 11, а рухомий фланець 12 - з його середньою точкою. Для утримання важеля 11 в заданому положенні і зменшення впливу механічного гістерезису матеріалу стінок сильфона використана пружина 14. Робоча рідина із приймального сильфона 1 поступає в перший сильфон 8 через дросель 6 і жорсткий трубопровод 13, з'єднаний з нерухомим фланцем 15, а в сильфон 7 - безпосередньо через жорсткий трубопровод 16, з'єднаний з корпусом дроселя, а другим кінцем - з нерухомим фланцем 17. Рухомі деталі диференціатора переміщуються в напрямних 4, 18, виконаних у вигляді циліндричних втулок. Вихідною тягою 19 диференціатор з'єднується з виконавчим органом системи автоматичного регулювання або керування. Працює диференціатор наступним чином. При різкому зростанні вхідного сигналу через наявність дроселя 6 тиск в сильфоні 8 буде зростати повільніше ніж у сильфоні 7, в результаті чого рухомий фланець 9 переміститься вправо, а разом з ним нижній кінець підсумовуючого важеля 11, створюючи додаткове переміщення верхньому його кінцю і вихідній тязі 19. Рухомий фланець 12 сильфона 7, з'єднаний з підсумовуючим важелем 11 в його середній частині переміститься вліво і тим самим ще додатково перемістить вихідну тягу 19. Таким чином, на виході диференціатора буде додавання двох переміщень: першого, пропорційного зміні вхідного сигналу і другого переміщення, пропорційного швидкості зміни вхідного сигналу. У випадку різкого спадання вхідного сигналу диференціатор працюватиме аналогічно, але з тією різницею, що переміщення його рухомих деталей будуть направлені у зворотний бік. В описаних випадках диференціатор працює як підсилювально-диференціююча ланка системи автоматики. При повільному зростанні (спаданні) вхідного сигналу тиск робочої рідини в приймальному сильфоні 1 змінюватиметься повільно, а перепад тисків в сильфонах 7, 8 буде практично відсутній. В результаті рухомі фланці 9, 12 переміщатимуться з однаковою швидкістю, забезпечуючи переміщення підсумовуючого важеля без зміни кута нахилу і передачу вихідного 31153 4 сигналу через тягу 19 на орган виконавчого механізму. В даному випадку вихід диференціатора буде складатися тільки з переміщення, пропорційного зміні вхідного сигналу, і він працюватиме як підсилювальна ланка систем автоматики. Використання запропонованого диференціатора, в порівнянні з відомим, дасть можливість: - підвищити точність роботи диференціатора і систем автоматики в цілому за рахунок усунення нелінійностей, спричинених опором і деформацією гнучкого трубопровода, шляхом заміни його на жорсткий; - покращити компановку і зменшити габаритні розміри диференціатора, зменшенням довжини жорсткого трубопроводу; - розширити область застосування в системах автоматичного регулювання і керування з підвищеними вимогами до точності формування вихідних, пропорційних першій похідній від вхідних, сигналів.
ДивитисяДодаткова інформація
Назва патенту англійськоюDifferentiator of signals of systems of automation of non-electric type
Автори англійськоюBozhok Arkadii Mykhailovych, Ponedilok Vadym Vitaliiovych
Назва патенту російськоюДифференциатор сигналов систем автоматики неэлектрического типа
Автори російськоюБожок Аркадий Михайлович, Понедилок Вадим Витальевич
МПК / Мітки
Мітки: диференціатор, сигналів, неелектричного, типу, систем, автоматики
Код посилання
<a href="https://ua.patents.su/2-31153-diferenciator-signaliv-sistem-avtomatiki-neelektrichnogo-tipu.html" target="_blank" rel="follow" title="База патентів України">Диференціатор сигналів систем автоматики неелектричного типу</a>
Диференціатор

Номер патенту: 22606
Опубліковано: 25.04.2007
Автори: Кримський Володимир Павлович, Божок Аркадій Михайлович, Понеділок Володимир Францович
МПК: G06D 5/00
Мітки: диференціатор
Формула / Реферат:
Диференціатор, що містить підсумовуючий важіль, вузол приймання сигналів, перетворювач з двома сильфонами, один з яких з'єднаний з вузлом через дросель, а другий, безпосередньо, двома рухомими фланцями з'єднаний з підсумовуючим важелем і нерухомим фланцем, який відрізняється тим, що він додатково обладнаний компенсатором змінювання температури у вигляді двох сильфонів, одні торці яких зв'язані з нерухомим фланцем, а протилежні торці - з...
Диференціатор
Номер патенту: 30175
Опубліковано: 11.02.2008
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
МПК: G06G 5/00
Мітки: диференціатор
Формула / Реферат:
Диференціатор, що містить основний мембранний виконавчий механізм з безштоковою порожниною і підпружиненим штоком, підвідну пневмолінію, з’єднану безпосередньо з порожниною, і вхідну тягу, який відрізняється тим, що в ньому установлені додатковий мембранний механізм з безштоковою порожниною і підпружиненим штоком з тягою, регульований дросель, через який безштокова порожнина з’єднується з підвідною пневмолінією, а також підсумовуючий важіль,...
Диференціатор божка а.м.

Номер патенту: 28690
Опубліковано: 25.12.2007
Автор: Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: а.м, диференціатор, божка
Формула / Реферат:
Диференціатор, що містить перетворювач з двома співвісними сильфонами, суміжні торці яких з'єднані з першим рухомим фланцем, другий торець першого сильфона з'єднаний з нерухомим фланцем і корпусом-напрямною, в якій розміщені перший і другий сильфони, а також перший підсумовуючий механізм, виконаний у вигляді третього сильфона, розміщеного коаксіально у другому сильфоні в напрямній втулці і з'єднаного одним торцем з третім рухомим фланцем...
Диференціатор а.м. божка-в.ф. понеділка

Номер патенту: 59306
Опубліковано: 15.08.2003
Автори: Божок Аркадій Михайлович, Понеділок Володимир Францович
Мітки: диференціатор, понеділка, а.м, божка-в.ф
Формула / Реферат:
Диференціатор, що містить перший і другий сильфони, з'єднані торцями спільного фланця та установлені в циліндричній напрямній, перший сильфон другим торцем з'єднаний з першим рухомим фланцем, а другий сильфон другим торцем - з другим рухомим фланцем, підсумовуючий механізм у вигляді сильфона, розміщеного усередині другого сильфона в напрямній втулці, з'єднаного одним торцем з третім рухомим фланцем вихідних сигналів, і вузол прийому вхідних...
Рейкове коло для систем залізничної автоматики
Номер патенту: 70491
Опубліковано: 15.10.2004
Автори: Кравцов Юрій Олександрович, Разгонов Сергій Адамович, Зенкевіч Юрій Іосіфович, Разгонов Адам Пантелійович
МПК: B61L 23/00
Мітки: залізничної, коло, автоматики, рейкове, систем
Формула / Реферат:
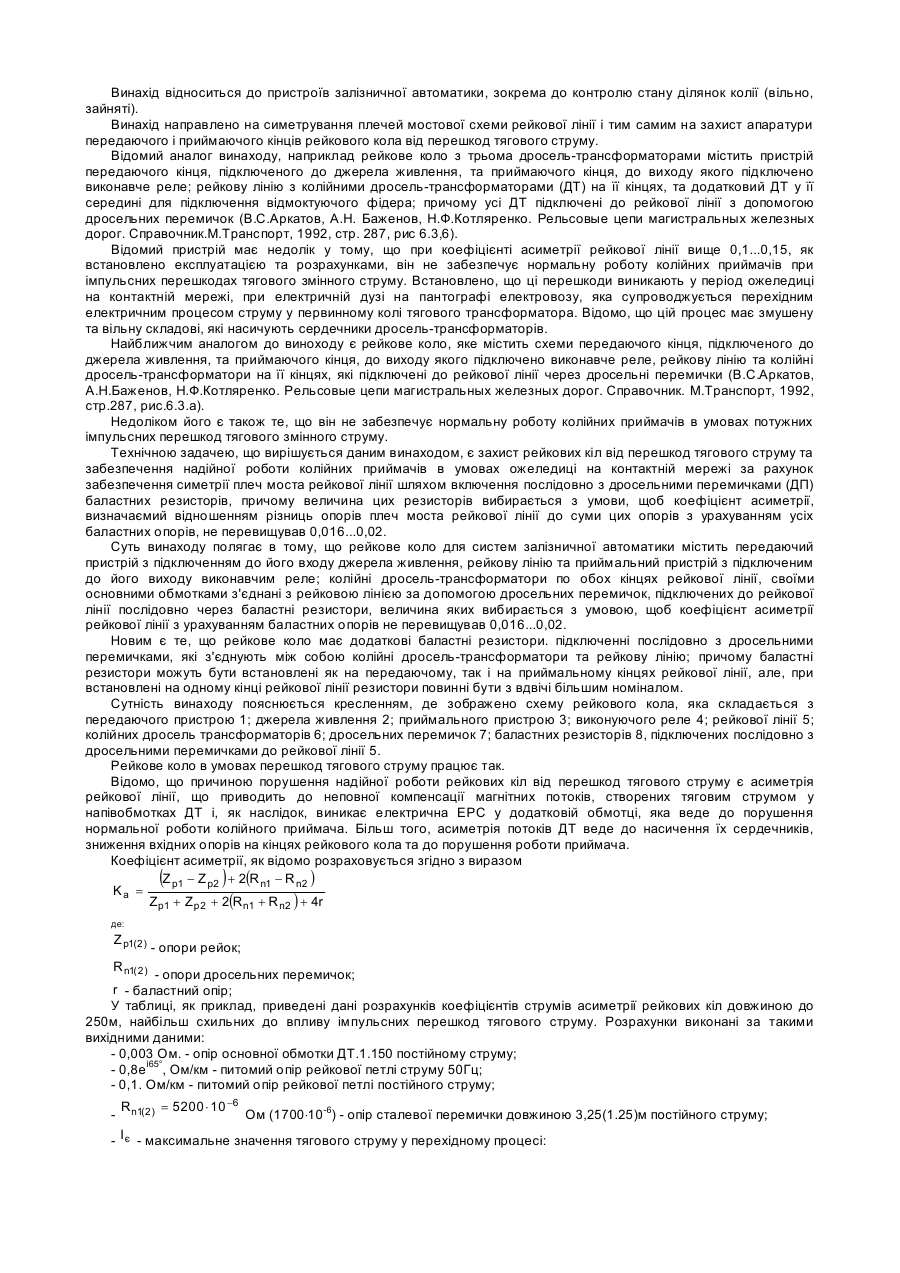
Рейкове коло для систем залізничної автоматики, яке містить передавальний пристрій з підключеним до його входу джерелом живлення, рейкову лінію та приймальний пристрій з підключеним до його виходу виконавчим реле, колійні дросель-трансформатори по обох кінцях рейкової лінії, своїми основними обмотками з'єднані з рейковою лінією за допомогою дросельних перемичок, яке відрізняється тим, що дросельні перемички підключені до рейкової лінії...
Наступний патент: Пробіотик для профілактики і лікування шлунково-кишкових захворювань птиці
Випадковий патент: Розчинник для розбавлення лакофарбових матеріалів