Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини
Номер патенту: 106583
Опубліковано: 25.09.2014
Автори: Неу Себастіан, Фітцнер Вернер, Баумгартен Йоахім
Формула / Реферат
1. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини, що включає робочі органи, зокрема зернозбирального комбайна, що містить обчислювальний пристрій та щонайменше один дисплей, при цьому обчислювальний пристрій виконано з можливістю обробки даних, отриманих від бортових датчиків машини, зовнішніх даних і даних, які можуть бути збережені в пам'яті обчислювального пристрою, а також подолання критичних робочих режимів сільськогосподарської робочої машини (1) з урахуванням щонайменше одного вибору наявних у розпорядженні інформаційних даних (28-30),
який відрізняється тим, що подолання критичних робочих режимів сільськогосподарської робочої машини (1) здійснюють шляхом оптимізації параметрів ефективності (37) сільськогосподарської машини (1) за допомогою інтерактивного зв'язку інтерфейсу між оператором (24) сільськогосподарської робочої машини (1) і системою (35) допомоги водієві, причому система (35) допомоги водієві у разі відхилення оптимізованих параметрів ефективності (37) здійснює оптимізацію альтернативного параметра ефективності (37).
2. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 1, який відрізняється тим, що оператор (24) сільськогосподарської робочої машини (1) ідентифікує критичний режим роботи і активізує систему (35) допомоги водієві або система (35) допомоги водієві активізується автоматично після ідентифікації критичного режиму роботи.
3. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 1 або 2, який відрізняється тим, що обробка наявних інформаційних даних (28-30) включає кроки:
а) аналіз режиму роботи сільськогосподарської робочої машини (1) та ідентифікацію критичного режиму роботи,
b) обробка тактичних шляхів рішення для подолання критичного робочого режиму сільськогосподарської робочої машини (1), що зберігається в пам'яті обчислювального пристрою (27), таким чином, що пропонуються оптимізовані робочі параметри (34) одного або кількох робочих органів (20);
c) автоматичне або здійснюване оператором (24) установлення оптимізованих робочих параметрів (34), що виробляються на кроці b), на одному або кількох робочих органах (20) сільськогосподарської робочої машини (1), та експлуатація сільськогосподарської робочої машини (1) з оптимізованими робочими параметрами (34), і
d) оцінка та перевірка робочого режиму сільськогосподарської робочої машини (1) після здійсненого установлення оптимізованих робочих параметрів (34) щонайменше на одному робочому органі (20).
4. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 3, який відрізняється тим, що після обробки кроку d) на кроці е) проводиться оцінка та перевірка протилежних параметрів ефективності (37) і/або якісних критеріїв (45).
5. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 4, який відрізняється тим, що оператор (24) сільськогосподарської робочої машини (1) може викликати повернення установлення оптимізованого робочого параметра (34), якщо один або кілька протилежних параметрів ефективності (37) і/або якісних критеріїв (45) перебувають поза межами допустимих значень.
6. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 3, який відрізняється тим, що на кроці а) контролюються, щонайменше робочі параметри (34) робочих органів (20) сільськогосподарської робочої машини (1) і/або параметри ефективності (37) сільськогосподарської робочої машини (1), причому критичний робочий режим ідентифікується тоді, коли щонайменше один робочий параметр (34) і/або щонайменше один параметр ефективності (37) відхиляється від діапазонів припустимих значень, що зберігаються в пам'яті обчислювального пристрою (27), або оператор (24) оцінює параметр ефективності (37) як незадовільний.
7. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за будь-яким з із попередніх пунктів, який відрізняється тим, що на першому кроці (43) меню від оператора (24) сільськогосподарської робочої машини (1) запитується вибір підлягаючого оптимізації параметра ефективності (37).
8. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 7, який відрізняється тим, що на наступному кроці (44) меню від оператора (24) сільськогосподарської робочої машини (1) запитується вибір підлягаючого покращенню критерію якості (45), встановленого на першому кроці (43) меню параметра ефективності (37).
9. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за пп. 7 і 8, який відрізняється тим, що система (35) допомоги водієві в залежності від визначених оператором (24) сільськогосподарської робочої машини (1) параметрів ефективності (37) та стосовних до них критеріїв якості (45) пропонує оптимізований робочий параметр (34) для щонайменше одного робочого органу (20) і при цьому оператор (24) сільськогосподарської робочої машини (1) шляхом підтвердження або відхилення настройки оптимізованого робочого параметра (37) впливає на щонайменше один робочий орган (20).
10. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 9, який відрізняється тим, що після підтвердження настройки оптимізованого робочого параметра (34) на як мінімум одному робочому органі (20) сільськогосподарської робочої машини (1) проходить обмежена за часом неусталена фаза, при цьому на екрані дисплея (22) зміна одного або кількох параметрів ефективності (37) і/або критеріїв якості (45) візуально відображається у порівнянні із значеннями цих параметрів ефективності (37) і/або критеріїв якості (45) до зміни робочих параметрів (34).
11. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини и за п. 10, який відрізняється тим, що візуально відображені параметри ефективності (37) і/або критерії якості (45) в обчислювальному пристрої (27) поєднані функціональними залежностями з умовами збирання врожаю, так що змінювані в неусталеній фазі умови збирання врожаю враховуються при візуалізації параметрів ефективності (37) і/або критеріїв якості (45).
12. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 10 або 11, який відрізняється тим, що на наступному кроці (54) меню від оператора (24) сільськогосподарської робочої машини (1) запитується якісна оцінка зміни параметра ефективності (37) і/або критерію якості (45) і/або, що система (35) допомоги водієві здійснює оцінку автоматично та візуально відображує на екрані дисплея (22).
13. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 12, який відрізняється тим, що якісна оцінка обмежена значеннями "краще", "гірше" або "так само".
14. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 13, який відрізняється тим, що при відхиленні пропозиції способу вирішення задачі або при якісній оцінці "гірше" чи "так само" система (35) допомоги водієві пропонує оптимізацію альтернативного робочого параметра (37).
15. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 14, який відрізняється тим, що пропозиція базується на аналізі експертних знань, що зберігається в пам'яті обчислювального пристрою (27), при цьому експертні знання враховують взаємозв'язки між різними параметрами ефективності (37), критеріями якості (45) та робочими параметрами (34) робочих органів (20).
16. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 15, який відрізняється тим, що на наступному кроці (49) меню від оператора (24) сільськогосподарської робочої машини (1) запитується прийняття або відхилення оптимізації альтернативного робочого параметра (34) і при цьому оператор (24) сільськогосподарської робочої машини (1) шляхом підтвердження або відхилення впливає на оптимізацію альтернативного робочого параметра (34).
17. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 16, який відрізняється тим, що пропозиція прийняття оптимізованого робочого параметра (34) може бути поєднана з індикаційним повідомленням про вплив на одного або більше інших параметрів ефективності (37) і/або критеріїв якості (45).
18. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за будь-яким із попередніх пунктів, який відрізняється тим, що на результативному кроці меню на екрані дисплея (22) візуально відображається результат оптимізації.
19. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за будь-яким із попередніх пунктів, який відрізняється тим, що наявні параметри ефективності (37) включають "потік збираної продукції/зображення роботи машини" і/або "втрату зерна", і/або "сходовий продукт", і/або "якість зерна".
20. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 19, який відрізняється тим, що до параметра ефективності (37) "якість зерна" віднесені якісні критерії (45) "дроблене зерно" і/або "відділення від оболонок/відділення остей", і/або "чистота зерна".
21. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 19, який відрізняється тим, що до параметра ефективності (37) "маса, що повертається," віднесені якісні критерії (45) "кількість маси, що повертається" і/або "кількість зерна у масі, що повертається".
22. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 19, який відрізняється тим, що до параметра ефективності (37) "зернові втрати" віднесені якісні критерії (45) "зернові втрати на змінному робочому агрегаті" і/або "зернові втрати при сепаруванні", і/або "зернові втрати при очистці", і/або "зернові втрати при обмолоті".
23. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 19, який відрізняється тим, що до параметра ефективності (37) "потік збираної маси/схема роботи машини" віднесені якісні критерії (45) "жниварка" і/або "укладання валка", і/або "навісна соломорізка", і/або "розподільник подрібненої маси", і/або "приймальний канал", і/або "молотарка", і/або "сепарувальний пристрій".
Текст
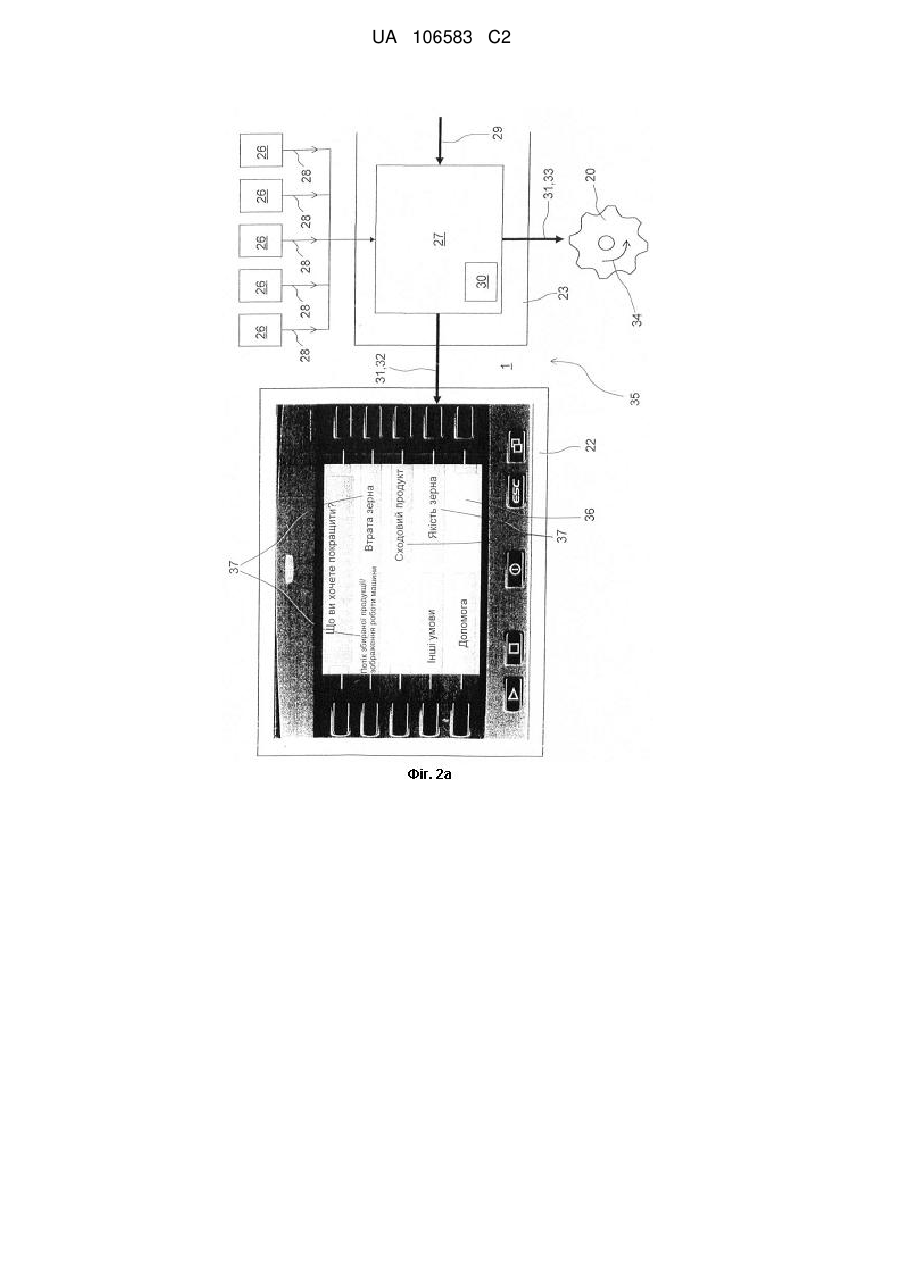
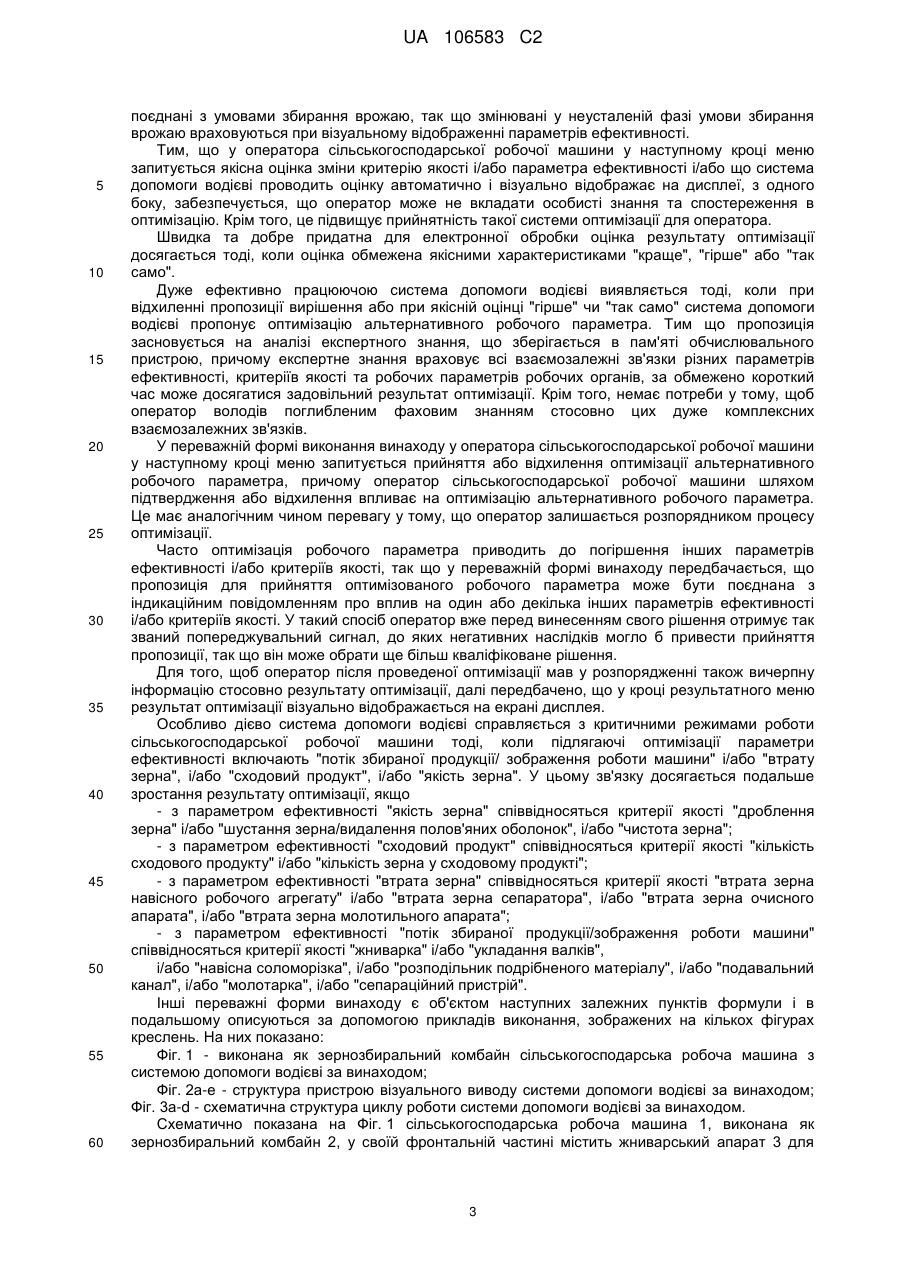
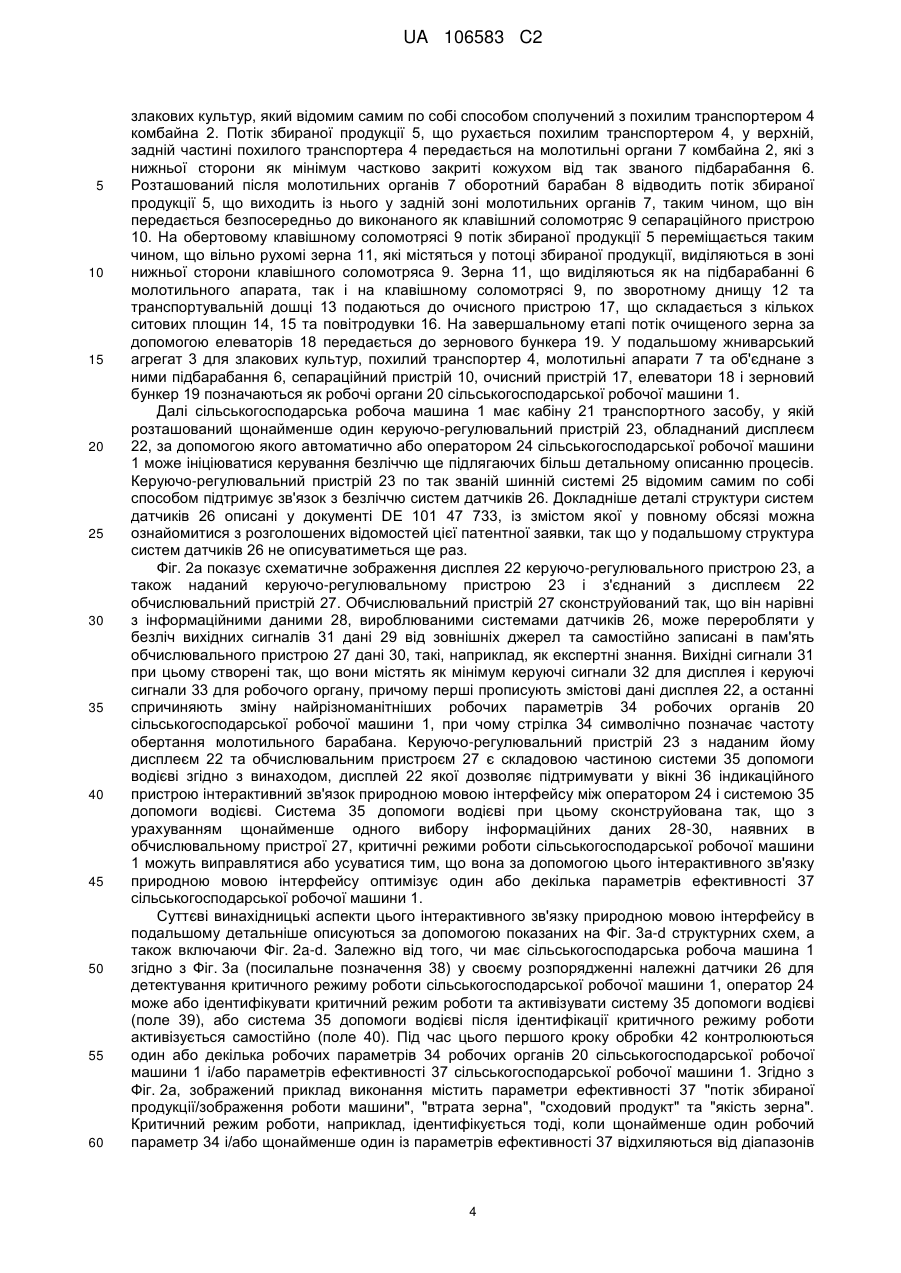
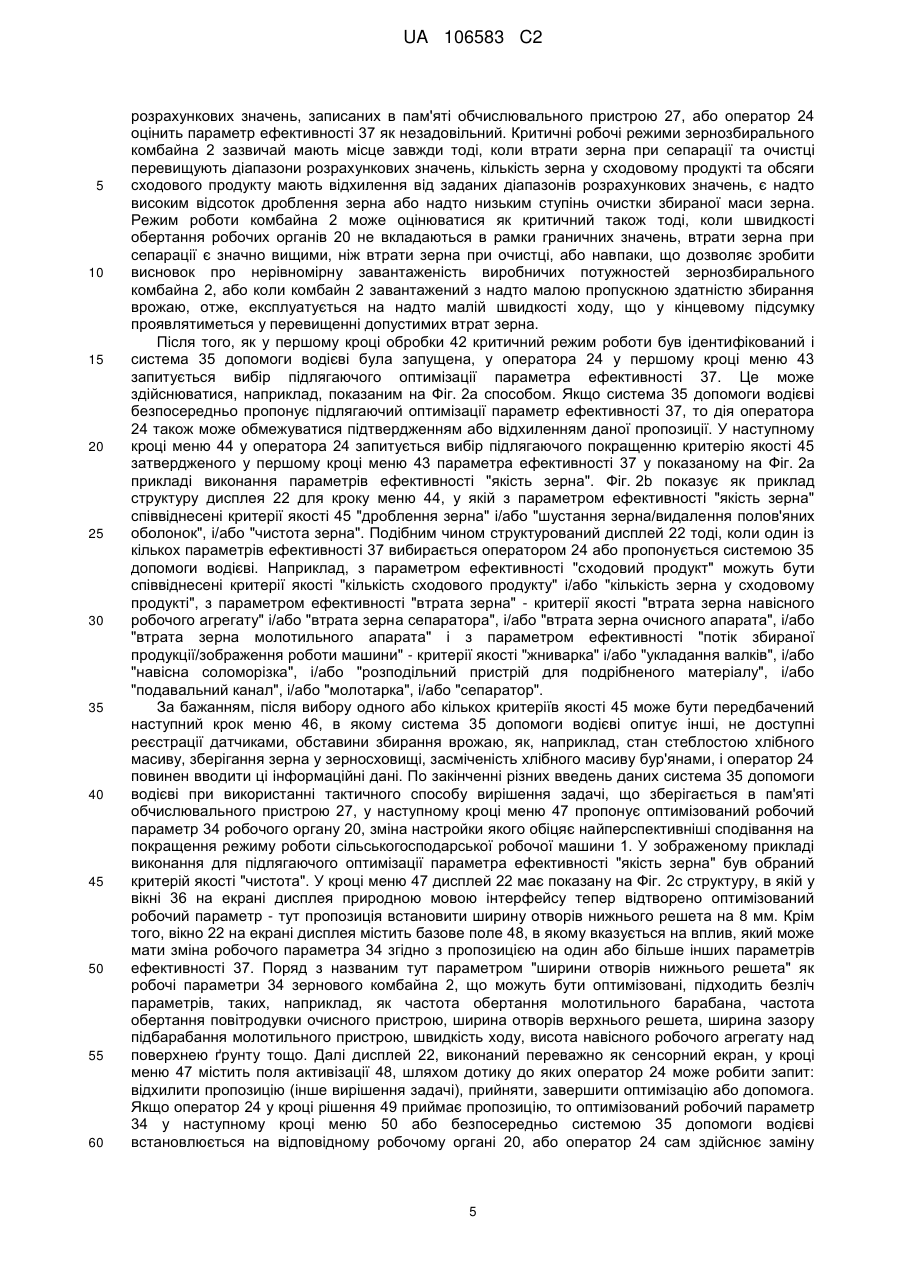
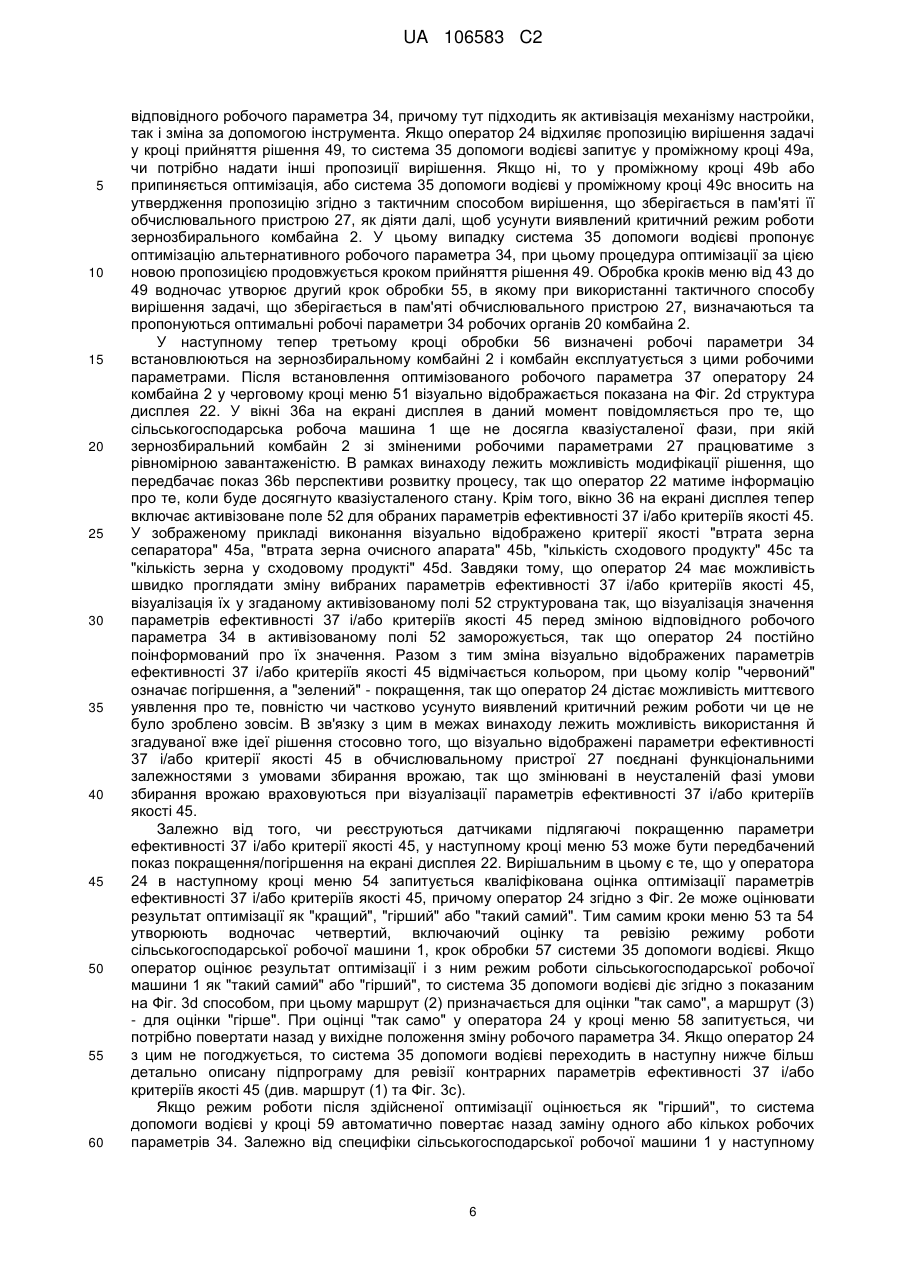
Реферат: Заявлений спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини, що включає робочі органи, зокрема зернозбирального комбайна, що містить обчислювальний пристрій та щонайменше один дисплей. Обчислювальний пристрій виконано з можливістю обробки даних, отриманих від бортових датчиків машини, зовнішніх даних і даних, які можуть бути збережені в пам'яті обчислювального пристрою, а також подолання критичних робочих режимів сільськогосподарської робочої машини (1) з урахуванням щонайменше одного вибору наявних у розпорядженні інформаційних даних (28-30). Подолання критичних робочих режимів сільськогосподарської робочої машини (1) здійснюють шляхом оптимізації параметрів ефективності (37) сільськогосподарської машини (1) за допомогою інтерактивного зв'язку інтерфейсу між оператором (24) сільськогосподарської робочої машини (1) і системою (35) допомоги водієві. Система (35) допомоги водієві у разі відхилення оптимізованих параметрів ефективності (37) здійснює оптимізацію альтернативного параметра ефективності (37). UA 106583 C2 (12) UA 106583 C2 UA 106583 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід стосується системи допомоги водієві для сільськогосподарських робочих машин. Із патентної заявки DE 101 47 733 відома система допомоги водієві, яка підтримує оператора сільськогосподарської робочої машини при оптимізації робочих параметрів робочих органів. Система допомоги водієві поряд з комплексним індикаційним блоком включає обчислювальний пристрій для обробки різних сигналів датчиків. Виконана як зернозбиральний комбайн сільськогосподарська робоча машина містить безліч робочих органів, таких, наприклад, як жниварка, молотильний пристрій, сепараційні механізми і як мінімум один очисний апарат, що сполучені з безліччю сенсорних датчиків, які окрім робочих параметрів робочих органів можуть детектувати також параметри ефективності використання сільськогосподарської робочої машини, такі, наприклад, як втрата зерна, якість зерна та кількість сходового продукту. Дані, що визначаються сенсорними датчиками, надходять до центрального обчислювального пристрою, який потім із цих сигналів виробляє візуально відображені на моніторі індикаційного блока інформаційні дані. Візуалізовані інформаційні дані поряд з робочими параметрами сільськогосподарської робочої машини, наприклад, частотою обертання молотильного барабана, частотою обертання повітродувки очисного пристрою, пропускною здатністю маси збираної продукції, шириною зазору підбарабання молотарки, включають також параметри ефективності, такі, наприклад, як втрати зерна очисного та сепараційного пристрою. Так, для оптимізації різних робочих параметрів у патентній заявці DE 101 47 733 пропонується метод, при якому оператор у першому кроці способу веде сільськогосподарську робочу машину через масив сільгоспкультури, що підлягає збиранню, з настроєною на очікувану пропускну здатність потоку збираної продукції швидкістю ходу, так що комбайн за певний проміжок часу завантажується майже незмінною кількістю збираного врожаю. За таких обставин оператор повинен спочатку чекати, щоб комбайн досяг так званого усталеного режиму, при якому досягається приблизно постійний, добрий або поганий, результат роботи. Цей результат роботи протоколюється електронною системою і показується оператору на моніторі індикаційного блока у візуально відображеному вигляді. Якщо встановлюється незадовільний результат роботи, то оператор комбайна насамперед декілька разів змінює обіцяний успіх робочий параметр робочого органа і в кожному випадку перечікує неусталену фазу комбайна із зміненим робочим параметром. Всі зміни результату роботи протоколюються, так що оператор по закінченні може прийняти рішення, при якому конкретному значенні робочого параметра був досягнутий найкращий результат роботи. Це конкретне значення встановлюється потім на відповідному робочому органі, так що у кінцевому підсумку настроюють покращений результат роботи сільськогосподарської робочої машини. Подібний метод має насамперед той недолік, що необхідний відносно великий період часу, аж поки різні робочі параметри комбайна запрацюють в оптимізованому діапазоні параметрів, оскільки для кожного робочого параметра повинна виконуватися певна процедура настроювання. Крім того, швидка та цілеспрямована оптимізація при такому структурованому методі регулювання значною мірою залежить від рівня знань оператора сільськогосподарської робочої машини, оскільки різні робочі параметри нерідко впливають один на одного взаємозворотно із-за дуже комплексних взаємодій. Тому задача винаходу полягає у тому, щоб уникнути описаних недоліків рівня техніки і запропонувати, зокрема, систему допомоги водієві для оптимізації ефективності використання сільськогосподарської робочої машини, яка б протягом найкоротшого часу забезпечувала оптимізований режим роботи сільськогосподарської робочої машини без опіки оператора. Ця задача, згідно з винаходом, вирішується за допомогою відмітних ознак пункту 1 патентної формули. Тим що система допомоги водієві з урахуванням щонайменше одного вибору наявних інформаційних даних виправляє критичні режими роботи сільськогосподарської робочої машини завдяки тому, що параметри ефективності використання сільськогосподарської робочої машини оптимізуються за допомогою інтерактивного зв'язку природною мовою інтерфейсу між оператором сільськогосподарської робочої машини і системою допомоги водієві, забезпечується, що протягом найкоротшого часу досягається оптимізований режим роботи сільськогосподарської робочої машини без необхідності операторові опікуватися протягом оптимізації системою допомоги водієві. Особливо ефективне використання системи допомоги водієві виявляється тоді, коли оператор сільськогосподарської робочої машини ідентифікує критичний режим роботи і активізує систему допомоги водієві або система допомоги водієві після ідентифікації критичного режиму роботи активізується автоматично. Така структура забезпечує, що оператор 1 UA 106583 C2 5 10 15 20 25 30 35 40 45 50 55 сільськогосподарської робочої машини тільки тоді стикається з оптимізацією робочих параметрів, коли виникають характерні погіршення результату роботи. З тим, щоб оператор мав змогу надійно контролювати хронологічний хід оптимізації, залишався обізнаним з досягнутими результатами і на будь-який момент часу був достатньо поінформований про дії, які виконані та які ще належить виконати, система допомоги водієві функціонує переважно з наступними кроками: a) аналіз режиму роботи сільськогосподарської робочої машини та ідентифікація критичного режиму роботи, b) обробка записаного в пам'ять обчислювального пристрою тактичного способу вирішення задачі подолання критичного режиму роботи сільськогосподарської робочої машини таким чином, що пропонуються оптимізовані робочі параметри одного або кількох робочих органів, c) автоматичне або здійснене оператором регулювання вироблених у кроці b) оптимізованих робочих параметрів на одному або кількох робочих органах сільськогосподарської робочої машини, а також експлуатація сільськогосподарської робочої машини з оптимізованими робочими параметрами, і d) оцінка та ревізія режиму роботи сільськогосподарської робочої машини після проведеної настройки оптимізованих робочих параметрів на щонайменше одному робочому органі. У переважній формі винаходу система допомоги водієві може, крім того, після обробки кроку d) проводити у кроці e) оцінку та ревізію контрарних параметрів ефективності і/або критеріїв якості. Це має перевагу у тому, що ведеться нагляд за взаємодіями між різними параметрами ефективності, критеріями якості та робочими параметрами і виявляються негативні впливи оптимізованих параметрів на контрарні параметри ефективності і/або критерії якості, так що завжди враховується режим роботи сільськогосподарської робочої машини в цілому. У наступній переважній формі винаходу оператор сільськогосподарської робочої машини може викликати повернення у вихідне положення оптимізованого робочого параметра, якщо один або більше контрарних параметрів ефективності і/або критеріїв якості знаходяться поза допустимими межами значень, так що виключається негативний вплив на режим роботи сільськогосподарської робочої машини в цілому. Система допомоги водієві, згідно з винаходом, далі може використовуватися дуже гнучко, якщо у кроці а) контролюються як мінімум робочі параметри робочих органів сільськогосподарської робочої машини і/або параметри ефективності сільськогосподарської робочої машини і критичний режим роботи ідентифікується тоді, коли щонайменше один робочий параметр і/або щонайменше один параметр ефективності відхиляється від діапазонів розрахункових значень, що зберігаються в пам'яті обчислювального пристрою, або оператор оцінить параметр ефективності як незадовільний. Обов'язково затверджуваний оператором процес розвитку оптимізації параметрів забезпечується насамперед тоді, коли оператор вступає в інтенсивний інтерактивний обмін з системою допомоги водієві згідно з винаходом, причому всі суттєві зміни параметрів повинні активно підтверджуватися оператором. Це гарантує, що оператор при оптимізації режиму роботи своєї машини не опікується системою допомоги водієві, що у кінцевому підсумку також підвищує прийнятність проведеної оптимізації параметрів, враховуючи те, що у оператора сільськогосподарської робочої машини у першому кроці меню запитується вибір підлягаючого оптимізації параметра ефективності, а в наступному кроці меню - вибір підлягаючого покращенню критерію якості затвердженого у першому кроці меню параметра ефективності. Основою керованої оператором оптимізації у переважній формі винаходу вважається також те, що система допомоги водієві в залежності від визначених оператором сільськогосподарської робочої машини параметрів ефективності та стосовних їх критеріїв якості пропонує оптимізований робочий параметр для щонайменше одного робочого органа і оператор сільськогосподарської робочої машини шляхом підтвердження або відхилення настройки оптимізованого робочого параметра може впливати на щонайменше один робочий орган. Для того, щоб мати змогу безпомилково оцінити результат оптимізації і оператор у достатній мірі був поінформований про регульовану зміну робочого результату на будь-який момент часу, переважна форма винаходу передбачає, що після підтвердження настройки оптимізованого робочого параметра на щонайменше одному робочому органі сільськогосподарська робоча машина проходить обмежену за часом неусталену фазу, при якій на екрані дисплея візуально відображується зміна одного або кількох параметрів ефективності у порівнянні із значенням цих параметрів ефективності до зміни робочих параметрів. Якісно вищий за значенням результат оптимізації досягається також тим, що візуалізовані параметри ефективності в обчислювальному пристрої функціональними залежностями 2 UA 106583 C2 5 10 15 20 25 30 35 40 45 50 55 60 поєднані з умовами збирання врожаю, так що змінювані у неусталеній фазі умови збирання врожаю враховуються при візуальному відображенні параметрів ефективності. Тим, що у оператора сільськогосподарської робочої машини у наступному кроці меню запитується якісна оцінка зміни критерію якості і/або параметра ефективності і/або що система допомоги водієві проводить оцінку автоматично і візуально відображає на дисплеї, з одного боку, забезпечується, що оператор може не вкладати особисті знання та спостереження в оптимізацію. Крім того, це підвищує прийнятність такої системи оптимізації для оператора. Швидка та добре придатна для електронної обробки оцінка результату оптимізації досягається тоді, коли оцінка обмежена якісними характеристиками "краще", "гірше" або "так само". Дуже ефективно працюючою система допомоги водієві виявляється тоді, коли при відхиленні пропозиції вирішення або при якісній оцінці "гірше" чи "так само" система допомоги водієві пропонує оптимізацію альтернативного робочого параметра. Тим що пропозиція засновується на аналізі експертного знання, що зберігається в пам'яті обчислювального пристрою, причому експертне знання враховує всі взаємозалежні зв'язки різних параметрів ефективності, критеріїв якості та робочих параметрів робочих органів, за обмежено короткий час може досягатися задовільний результат оптимізації. Крім того, немає потреби у тому, щоб оператор володів поглибленим фаховим знанням стосовно цих дуже комплексних взаємозалежних зв'язків. У переважній формі виконання винаходу у оператора сільськогосподарської робочої машини у наступному кроці меню запитується прийняття або відхилення оптимізації альтернативного робочого параметра, причому оператор сільськогосподарської робочої машини шляхом підтвердження або відхилення впливає на оптимізацію альтернативного робочого параметра. Це має аналогічним чином перевагу у тому, що оператор залишається розпорядником процесу оптимізації. Часто оптимізація робочого параметра приводить до погіршення інших параметрів ефективності і/або критеріїв якості, так що у переважній формі винаходу передбачається, що пропозиція для прийняття оптимізованого робочого параметра може бути поєднана з індикаційним повідомленням про вплив на один або декілька інших параметрів ефективності і/або критеріїв якості. У такий спосіб оператор вже перед винесенням свого рішення отримує так званий попереджувальний сигнал, до яких негативних наслідків могло б привести прийняття пропозиції, так що він може обрати ще більш кваліфіковане рішення. Для того, щоб оператор після проведеної оптимізації мав у розпорядженні також вичерпну інформацію стосовно результату оптимізації, далі передбачено, що у кроці результатного меню результат оптимізації візуально відображається на екрані дисплея. Особливо дієво система допомоги водієві справляється з критичними режимами роботи сільськогосподарської робочої машини тоді, коли підлягаючі оптимізації параметри ефективності включають "потік збираної продукції/ зображення роботи машини" і/або "втрату зерна", і/або "сходовий продукт", і/або "якість зерна". У цьому зв'язку досягається подальше зростання результату оптимізації, якщо - з параметром ефективності "якість зерна" співвідносяться критерії якості "дроблення зерна" і/або "шустання зерна/видалення полов'яних оболонок", і/або "чистота зерна"; - з параметром ефективності "сходовий продукт" співвідносяться критерії якості "кількість сходового продукту" і/або "кількість зерна у сходовому продукті"; - з параметром ефективності "втрата зерна" співвідносяться критерії якості "втрата зерна навісного робочого агрегату" і/або "втрата зерна сепаратора", і/або "втрата зерна очисного апарата", і/або "втрата зерна молотильного апарата"; - з параметром ефективності "потік збираної продукції/зображення роботи машини" співвідносяться критерії якості "жниварка" і/або "укладання валків", і/або "навісна соломорізка", і/або "розподільник подрібненого матеріалу", і/або "подавальний канал", і/або "молотарка", і/або "сепараційний пристрій". Інші переважні форми винаходу є об'єктом наступних залежних пунктів формули і в подальшому описуються за допомогою прикладів виконання, зображених на кількох фігурах креслень. На них показано: Фіг. 1 - виконана як зернозбиральний комбайн сільськогосподарська робоча машина з системою допомоги водієві за винаходом; Фіг. 2а-е - структура пристрою візуального виводу системи допомоги водієві за винаходом; Фіг. 3а-d - схематична структура циклу роботи системи допомоги водієві за винаходом. Схематично показана на Фіг. 1 сільськогосподарська робоча машина 1, виконана як зернозбиральний комбайн 2, у своїй фронтальній частині містить жниварський апарат 3 для 3 UA 106583 C2 5 10 15 20 25 30 35 40 45 50 55 60 злакових культур, який відомим самим по собі способом сполучений з похилим транспортером 4 комбайна 2. Потік збираної продукції 5, що рухається похилим транспортером 4, у верхній, задній частині похилого транспортера 4 передається на молотильні органи 7 комбайна 2, які з нижньої сторони як мінімум частково закриті кожухом від так званого підбарабання 6. Розташований після молотильних органів 7 оборотний барабан 8 відводить потік збираної продукції 5, що виходить із нього у задній зоні молотильних органів 7, таким чином, що він передається безпосередньо до виконаного як клавішний соломотряс 9 сепараційного пристрою 10. На обертовому клавішному соломотрясі 9 потік збираної продукції 5 переміщається таким чином, що вільно рухомі зерна 11, які містяться у потоці збираної продукції, виділяються в зоні нижньої сторони клавішного соломотряса 9. Зерна 11, що виділяються як на підбарабанні 6 молотильного апарата, так і на клавішному соломотрясі 9, по зворотному днищу 12 та транспортувальній дошці 13 подаються до очисного пристрою 17, що складається з кількох ситових площин 14, 15 та повітродувки 16. На завершальному етапі потік очищеного зерна за допомогою елеваторів 18 передається до зернового бункера 19. У подальшому жниварський агрегат 3 для злакових культур, похилий транспортер 4, молотильні апарати 7 та об'єднане з ними підбарабання 6, сепараційний пристрій 10, очисний пристрій 17, елеватори 18 і зерновий бункер 19 позначаються як робочі органи 20 сільськогосподарської робочої машини 1. Далі сільськогосподарська робоча машина 1 має кабіну 21 транспортного засобу, у якій розташований щонайменше один керуючо-регулювальний пристрій 23, обладнаний дисплеєм 22, за допомогою якого автоматично або оператором 24 сільськогосподарської робочої машини 1 може ініціюватися керування безліччю ще підлягаючих більш детальному описанню процесів. Керуючо-регулювальний пристрій 23 по так званій шинній системі 25 відомим самим по собі способом підтримує зв'язок з безліччю систем датчиків 26. Докладніше деталі структури систем датчиків 26 описані у документі DE 101 47 733, із змістом якої у повному обсязі можна ознайомитися з розголошених відомостей цієї патентної заявки, так що у подальшому структура систем датчиків 26 не описуватиметься ще раз. Фіг. 2а показує схематичне зображення дисплея 22 керуючо-регулювального пристрою 23, а також наданий керуючо-регулювальному пристрою 23 і з'єднаний з дисплеєм 22 обчислювальний пристрій 27. Обчислювальний пристрій 27 сконструйований так, що він нарівні з інформаційними даними 28, вироблюваними системами датчиків 26, може переробляти у безліч вихідних сигналів 31 дані 29 від зовнішніх джерел та самостійно записані в пам'ять обчислювального пристрою 27 дані 30, такі, наприклад, як експертні знання. Вихідні сигнали 31 при цьому створені так, що вони містять як мінімум керуючі сигнали 32 для дисплея і керуючі сигнали 33 для робочого органу, причому перші прописують змістові дані дисплея 22, а останні спричиняють зміну найрізноманітніших робочих параметрів 34 робочих органів 20 сільськогосподарської робочої машини 1, при чому стрілка 34 символічно позначає частоту обертання молотильного барабана. Керуючо-регулювальний пристрій 23 з наданим йому дисплеєм 22 та обчислювальним пристроєм 27 є складовою частиною системи 35 допомоги водієві згідно з винаходом, дисплей 22 якої дозволяє підтримувати у вікні 36 індикаційного пристрою інтерактивний зв'язок природною мовою інтерфейсу між оператором 24 і системою 35 допомоги водієві. Система 35 допомоги водієві при цьому сконструйована так, що з урахуванням щонайменше одного вибору інформаційних даних 28-30, наявних в обчислювальному пристрої 27, критичні режими роботи сільськогосподарської робочої машини 1 можуть виправлятися або усуватися тим, що вона за допомогою цього інтерактивного зв'язку природною мовою інтерфейсу оптимізує один або декілька параметрів ефективності 37 сільськогосподарської робочої машини 1. Суттєві винахідницькі аспекти цього інтерактивного зв'язку природною мовою інтерфейсу в подальшому детальніше описуються за допомогою показаних на Фіг. 3а-d структурних схем, а також включаючи Фіг. 2a-d. Залежно від того, чи має сільськогосподарська робоча машина 1 згідно з Фіг. 3а (посилальне позначення 38) у своєму розпорядженні належні датчики 26 для детектування критичного режиму роботи сільськогосподарської робочої машини 1, оператор 24 може або ідентифікувати критичний режим роботи та активізувати систему 35 допомоги водієві (поле 39), або система 35 допомоги водієві після ідентифікації критичного режиму роботи активізується самостійно (поле 40). Під час цього першого кроку обробки 42 контролюються один або декілька робочих параметрів 34 робочих органів 20 сільськогосподарської робочої машини 1 і/або параметрів ефективності 37 сільськогосподарської робочої машини 1. Згідно з Фіг. 2а, зображений приклад виконання містить параметри ефективності 37 "потік збираної продукції/зображення роботи машини", "втрата зерна", "сходовий продукт" та "якість зерна". Критичний режим роботи, наприклад, ідентифікується тоді, коли щонайменше один робочий параметр 34 і/або щонайменше один із параметрів ефективності 37 відхиляються від діапазонів 4 UA 106583 C2 5 10 15 20 25 30 35 40 45 50 55 60 розрахункових значень, записаних в пам'яті обчислювального пристрою 27, або оператор 24 оцінить параметр ефективності 37 як незадовільний. Критичні робочі режими зернозбирального комбайна 2 зазвичай мають місце завжди тоді, коли втрати зерна при сепарації та очистці перевищують діапазони розрахункових значень, кількість зерна у сходовому продукті та обсяги сходового продукту мають відхилення від заданих діапазонів розрахункових значень, є надто високим відсоток дроблення зерна або надто низьким ступінь очистки збираної маси зерна. Режим роботи комбайна 2 може оцінюватися як критичний також тоді, коли швидкості обертання робочих органів 20 не вкладаються в рамки граничних значень, втрати зерна при сепарації є значно вищими, ніж втрати зерна при очистці, або навпаки, що дозволяє зробити висновок про нерівномірну завантаженість виробничих потужностей зернозбирального комбайна 2, або коли комбайн 2 завантажений з надто малою пропускною здатністю збирання врожаю, отже, експлуатується на надто малій швидкості ходу, що у кінцевому підсумку проявлятиметься у перевищенні допустимих втрат зерна. Після того, як у першому кроці обробки 42 критичний режим роботи був ідентифікований і система 35 допомоги водієві була запущена, у оператора 24 у першому кроці меню 43 запитується вибір підлягаючого оптимізації параметра ефективності 37. Це може здійснюватися, наприклад, показаним на Фіг. 2а способом. Якщо система 35 допомоги водієві безпосередньо пропонує підлягаючий оптимізації параметр ефективності 37, то дія оператора 24 також може обмежуватися підтвердженням або відхиленням даної пропозиції. У наступному кроці меню 44 у оператора 24 запитується вибір підлягаючого покращенню критерію якості 45 затвердженого у першому кроці меню 43 параметра ефективності 37 у показаному на Фіг. 2а прикладі виконання параметрів ефективності "якість зерна". Фіг. 2b показує як приклад структуру дисплея 22 для кроку меню 44, у якій з параметром ефективності "якість зерна" співвіднесені критерії якості 45 "дроблення зерна" і/або "шустання зерна/видалення полов'яних оболонок", і/або "чистота зерна". Подібним чином структурований дисплей 22 тоді, коли один із кількох параметрів ефективності 37 вибирається оператором 24 або пропонується системою 35 допомоги водієві. Наприклад, з параметром ефективності "сходовий продукт" можуть бути співвіднесені критерії якості "кількість сходового продукту" і/або "кількість зерна у сходовому продукті", з параметром ефективності "втрата зерна" - критерії якості "втрата зерна навісного робочого агрегату" і/або "втрата зерна сепаратора", і/або "втрата зерна очисного апарата", і/або "втрата зерна молотильного апарата" і з параметром ефективності "потік збираної продукції/зображення роботи машини" - критерії якості "жниварка" і/або "укладання валків", і/або "навісна соломорізка", і/або "розподільний пристрій для подрібненого матеріалу", і/або "подавальний канал", і/або "молотарка", і/або "сепаратор". За бажанням, після вибору одного або кількох критеріїв якості 45 може бути передбачений наступний крок меню 46, в якому система 35 допомоги водієві опитує інші, не доступні реєстрації датчиками, обставини збирання врожаю, як, наприклад, стан стеблостою хлібного масиву, зберігання зерна у зерносховищі, засміченість хлібного масиву бур'янами, і оператор 24 повинен вводити ці інформаційні дані. По закінченні різних введень даних система 35 допомоги водієві при використанні тактичного способу вирішення задачі, що зберігається в пам'яті обчислювального пристрою 27, у наступному кроці меню 47 пропонує оптимізований робочий параметр 34 робочого органу 20, зміна настройки якого обіцяє найперспективніші сподівання на покращення режиму роботи сільськогосподарської робочої машини 1. У зображеному прикладі виконання для підлягаючого оптимізації параметра ефективності "якість зерна" був обраний критерій якості "чистота". У кроці меню 47 дисплей 22 має показану на Фіг. 2с структуру, в якій у вікні 36 на екрані дисплея природною мовою інтерфейсу тепер відтворено оптимізований робочий параметр - тут пропозиція встановити ширину отворів нижнього решета на 8 мм. Крім того, вікно 22 на екрані дисплея містить базове поле 48, в якому вказується на вплив, який може мати зміна робочого параметра 34 згідно з пропозицією на один або більше інших параметрів ефективності 37. Поряд з названим тут параметром "ширини отворів нижнього решета" як робочі параметри 34 зернового комбайна 2, що можуть бути оптимізовані, підходить безліч параметрів, таких, наприклад, як частота обертання молотильного барабана, частота обертання повітродувки очисного пристрою, ширина отворів верхнього решета, ширина зазору підбарабання молотильного пристрою, швидкість ходу, висота навісного робочого агрегату над поверхнею ґрунту тощо. Далі дисплей 22, виконаний переважно як сенсорний екран, у кроці меню 47 містить поля активізації 48, шляхом дотику до яких оператор 24 може робити запит: відхилити пропозицію (інше вирішення задачі), прийняти, завершити оптимізацію або допомога. Якщо оператор 24 у кроці рішення 49 приймає пропозицію, то оптимізований робочий параметр 34 у наступному кроці меню 50 або безпосередньо системою 35 допомоги водієві встановлюється на відповідному робочому органі 20, або оператор 24 сам здійснює заміну 5 UA 106583 C2 5 10 15 20 25 30 35 40 45 50 55 60 відповідного робочого параметра 34, причому тут підходить як активізація механізму настройки, так і зміна за допомогою інструмента. Якщо оператор 24 відхиляє пропозицію вирішення задачі у кроці прийняття рішення 49, то система 35 допомоги водієві запитує у проміжному кроці 49а, чи потрібно надати інші пропозиції вирішення. Якщо ні, то у проміжному кроці 49b або припиняється оптимізація, або система 35 допомоги водієві у проміжному кроці 49с вносить на утвердження пропозицію згідно з тактичним способом вирішення, що зберігається в пам'яті її обчислювального пристрою 27, як діяти далі, щоб усунути виявлений критичний режим роботи зернозбирального комбайна 2. У цьому випадку система 35 допомогиводієві пропонує оптимізацію альтернативного робочого параметра 34, при цьому процедура оптимізації за цією новою пропозицією продовжується кроком прийняття рішення 49. Обробка кроків меню від 43 до 49 водночас утворює другий крок обробки 55, в якому при використанні тактичного способу вирішення задачі, що зберігається в пам'яті обчислювального пристрою 27, визначаються та пропонуються оптимальні робочі параметри 34 робочих органів 20 комбайна 2. У наступному тепер третьому кроці обробки 56 визначені робочі параметри 34 встановлюються на зернозбиральному комбайні 2 і комбайн експлуатується з цими робочими параметрами. Після встановлення оптимізованого робочого параметра 37 оператору 24 комбайна 2 у черговому кроці меню 51 візуально відображається показана на Фіг. 2d структура дисплея 22. У вікні 36а на екрані дисплея в даний момент повідомляється про те, що сільськогосподарська робоча машина 1 ще не досягла квазіусталеної фази, при якій зернозбиральний комбайн 2 зі зміненими робочими параметрами 27 працюватиме з рівномірною завантаженістю. В рамках винаходу лежить можливість модифікації рішення, що передбачає показ 36b перспективи розвитку процесу, так що оператор 22 матиме інформацію про те, коли буде досягнуто квазіусталеного стану. Крім того, вікно 36 на екрані дисплея тепер включає активізоване поле 52 для обраних параметрів ефективності 37 і/або критеріїв якості 45. У зображеному прикладі виконання візуально відображено критерії якості "втрата зерна сепаратора" 45а, "втрата зерна очисного апарата" 45b, "кількість сходового продукту" 45с та "кількість зерна у сходовому продукті" 45d. Завдяки тому, що оператор 24 має можливість швидко проглядати зміну вибраних параметрів ефективності 37 і/або критеріїв якості 45, візуалізація їх у згаданому активізованому полі 52 структурована так, що візуалізація значення параметрів ефективності 37 і/або критеріїв якості 45 перед зміною відповідного робочого параметра 34 в активізованому полі 52 заморожується, так що оператор 24 постійно поінформований про їх значення. Разом з тим зміна візуально відображених параметрів ефективності 37 і/або критеріїв якості 45 відмічається кольором, при цьому колір "червоний" означає погіршення, а "зелений" - покращення, так що оператор 24 дістає можливість миттєвого уявлення про те, повністю чи частково усунуто виявлений критичний режим роботи чи це не було зроблено зовсім. В зв'язку з цим в межах винаходу лежить можливість використання й згадуваної вже ідеї рішення стосовно того, що візуально відображені параметри ефективності 37 і/або критерії якості 45 в обчислювальному пристрої 27 поєднані функціональними залежностями з умовами збирання врожаю, так що змінювані в неусталеній фазі умови збирання врожаю враховуються при візуалізації параметрів ефективності 37 і/або критеріїв якості 45. Залежно від того, чи реєструються датчиками підлягаючі покращенню параметри ефективності 37 і/або критерії якості 45, у наступному кроці меню 53 може бути передбачений показ покращення/погіршення на екрані дисплея 22. Вирішальним в цьому є те, що у оператора 24 в наступному кроці меню 54 запитується кваліфікована оцінка оптимізації параметрів ефективності 37 і/або критеріїв якості 45, причому оператор 24 згідно з Фіг. 2е може оцінювати результат оптимізації як "кращий", "гірший" або "такий самий". Тим самим кроки меню 53 та 54 утворюють водночас четвертий, включаючий оцінку та ревізію режиму роботи сільськогосподарської робочої машини 1, крок обробки 57 системи 35 допомоги водієві. Якщо оператор оцінює результат оптимізації і з ним режим роботи сільськогосподарської робочої машини 1 як "такий самий" або "гірший", то система 35 допомоги водієві діє згідно з показаним на Фіг. 3d способом, при цьому маршрут (2) призначається для оцінки "так само", а маршрут (3) - для оцінки "гірше". При оцінці "так само" у оператора 24 у кроці меню 58 запитується, чи потрібно повертати назад у вихідне положення зміну робочого параметра 34. Якщо оператор 24 з цим не погоджується, то система 35 допомоги водієві переходить в наступну нижче більш детально описану підпрограму для ревізії контрарних параметрів ефективності 37 і/або критеріїв якості 45 (див. маршрут (1) та Фіг. 3с). Якщо режим роботи після здійсненої оптимізації оцінюється як "гірший", то система допомоги водієві у кроці 59 автоматично повертає назад заміну одного або кількох робочих параметрів 34. Залежно від специфіки сільськогосподарської робочої машини 1 у наступному 6 UA 106583 C2 5 10 15 20 25 30 35 40 45 50 55 60 робочому кроці 60 система 35 допомоги водієві ініціює повернення робочого параметра 34 або оператор повинен викликати повернення. Якщо сільськогосподарська робоча машина 1 врештірешт знов досягла квазіусталеної фази (робочий крок 61, Фіг. 3d), то далі йде показаний на Фіг. 3с крок меню 64, який ще пояснюватиметься більш детально пізніше. Для кращої орієнтації цей перехід позначається на Фіг. 3d і 3с як маршрут (7). Якщо оператор 24 у кроці меню 64 прийме рішення на подальшу оптимізацію, то процес оптимізації знов починається у зображеному на Фіг. 3а кроці меню 47 (див. маршрут (4)), тобто, оптимізації альтернативного робочого параметра 34. Як вже описано, альтернативна пропозиція базується на тактичному способі вирішення задачі, що зберігається в пам'яті обчислювального пристрою 27, суттєвою складовою частиною якого є аналіз записаного в пам'ять обчислювального пристрою 27 експертного знання, причому експертне знання враховує взаємозалежності різних параметрів ефективності 37, критеріїв якості 45 та робочих параметрів 34 робочих органів 20. Потім вже описані кроки обробки 55, 56 приєднуються один до одного вже описаним способом. Визначений альтернативний робочий параметр 34 також повинен прийматися або відхилятися оператором 24, при цьому шляхом підтвердження або відхилення досягається оптимізація альтернативного робочого параметра 34. На основі комплексних взаємозалежностей між різними параметрами ефективності 37, критеріями якості 45 та робочими параметрами 34 система 35 допомоги водієві за винаходом структурована так, що вона згідно з Фіг. 3с містить субменю 62 для ревізії контрарних параметрів ефективності 37 і/або критеріїв якості 45. Наприклад, втрата зерна очисного пристрою являє собою контрарний критерій якості для підвищення частоти обертання повітродувки 16 очисного пристрою з метою покращення чистоти зерна, тому що із зростанням повітряного потоку в очисному пристрої 17 збільшується небезпека видування зерна з очисного пристрою 17, що у кінцевому підсумку призводить до погіршення параметра ефективності "втрата зерна". У першому кроці меню 63 за аналогією до вже описаного першого кроку обробки 42 (Фіг. 3а) контрарні параметри ефективності 37 і/або критерії якості 45 переглядаються або оператором 24, або, у випадку, якщо наявні належні датчики 26 для реєстрації контрарних параметрів ефективності 37 і/або критеріїв якості 45, то самою системою 35 допомоги водієві. Якщо не виявлено жодного відхилення контрарного параметра ефективності 37 і/або критеріїв якості 45, оператор 24 шляхом відповідного введення даних може або закінчити, або продовжити оптимізацію робочих параметрів 34 згідно з кроком меню 64, причому продовження веде до повторної обробки кроків меню від 43 до 54 (див. маршрут (4)). Якщо ж, навпаки, ідентифікується неприпустиме відхилення контрарних параметрів ефективності 37 і/або критеріїв якості 45 від записаних в пам'ять діапазонів розрахункових значень, то крок меню 63 аналогічним способом переходить у кроки меню 43, 44, 47, 49 вже описаного другого робочого кроку 55, до якого потім приєднуються так само вже описані третій і четвертий робочі кроки 56, 57, так що підпрограма меню 62 також у кінцевому результаті приводить до оптимізованих робочих параметрів 34, які виправляють критичні режими роботи сільськогосподарської робочої машини 1. Якщо оптимізація контрарного параметра ефективності 37 і/або критерію якості 45 хоча й привела до покращення режиму роботи сільськогосподарської робочої машини 1, однак цього покращення не вистачає, то щоб перевести оптимізовані параметри ефективності 37 і/або критерії якості 45 у записані в пам'ять допустимі діапазони, згідно з Фіг. 3d до субменю 62 може приєднуватися інша підпрограма оптимізації 65. На Фіг. 3с і 3d цей перехід описаний як маршрут (5). В опитній підпрограмі 66 уданий момент знову з'ясовується, чи реєструються датчиками контрарні параметри ефективності 37 і/або критерії якості 45 (крок 66а). У випадку, якщо це неможливо, то згідно з маршрутом (7) продовжується зображений на Фіг. 3с крок меню 64, а саме виводиться індикаційний запит: чи оптимізувати далі. Якщо реєстрація датчиками є можливою, то у наступному кроці 66b запитується: чи перебувають вже параметри ефективності 37 і/або критерії якості 45 у відповідних розрахункових межах. Якщо це так, то оптимізація згідно з маршрутом (7) продовжується зображеним на Фіг. 3с кроком меню 64, а саме виведенням індикаційного запиту: чи оптимізувати далі. Якщо оптимізовані параметри ефективності 37 і/або критерії якості 45 не перебувають у заданих розрахункових межах, це повідомляється оператору 24 у наступному кроці 66с. У кроці прийняття рішення 67 оператор 24 повинен вирішити, чи зберегти настроєний робочий параметр 34 чи відкинути. Якщо робочий параметр 34 треба зберегти, то оптимізація згідно з маршрутом (7) продовжується зображеним на Фіг. 3с кроком меню 64, а саме виведенням індикаційного запиту: чи оптимізувати далі. Якщо робочий параметр 34 не потрібно зберігати, то він відводиться у наступному робочому кроці 68, причому це здійснюється або автоматично системою 35 допомоги водієві, або оператором 24. Після повернення у вихідне положення робочого параметра 34 уданий моменту наступному кроці 7 UA 106583 C2 5 10 15 20 25 30 35 40 45 50 55 60 меню 69 вже описаним способом візуально відображається досягнення квазіусталеної фази комбайна 2 до того, як система 35 допомоги водієві згідно з маршрутом (7) у кроці меню 64 запитуватиме продовження оптимізації. Якщо за допомогою схематично зображеного на Фіг. 3с субменю 62 досягається лише рівноцінний результат оптимізації, то система 35 допомоги водієві згідно з накресленим маршрутом (6) переходить безпосередньо в дослідну підпрограму 66 інших оптимізаційних меню 65, причому оператор 24 повинен безпосередньо прийняти або відхилити визначений робочий параметр. Якщо після обробки субменю 62 настає погіршення результату оптимізації, то система 35 допомоги водієві згідно з накресленим маршрутом (9) переходить безпосередньо у крок меню 68 іншої підпрограми оптимізації 65 - повернення робочого параметра 34 у вихідне положення. Перелік посилальних позначень 1 Сільськогосподарська робоча машина 2 Зернозбиральний комбайн 3 Жниварка для злакових культур 4 Похилий транспортер 5 Потік збираної продукції 6 Підбарабання 7 Молотильний орган 8 Оборотний барабан 9 Клавішний соломотряс 10 Сепараційний пристрій 11 Зерно 12 Зворотне днище 13 Транспортувальна дошка 14 Ситова площина 15 Ситова площина 16 Повітродувка 17 Очисний пристрій 18 Елеватор 19 Зерновий бункер 20 Робочий орган 21 Кабіна транспортного засобу 22 Дисплей 23 Керуючо-регулювальний пристрій 24 Оператор 25 Шинна система 26 Система датчиків 27 Обчислювальний пристрій 28 Внутрішня інформація 29 Зовнішня інформація 30 Інформаційні дані 31 Вихідний сигнал 32 Сигнал для дисплея 33 Сигнал для робочого органу 34 Робочий параметр 35 Система допомоги водієві 36 Вікно дисплея 37 Параметр ефективності 38 Характеристика стану 39-40 Поля у структурній схемі 42 Перший крок обробки 43, 44 Крок меню 45 Критерій якості 46, 47 Крок меню 48 Поле активізації 49 Крок прийняття рішення 50, 51 Крок меню 52 Активізоване поле 53, 54 Крок меню 8 UA 106583 C2 5 10 55 Другий крок обробки 56 Третій крок обробки 57 Четвертий крок обробки 58, 59 Крок меню 60, 61 Робочий крок 62 Субменю 63, 64 Крок меню 65 Підпрограма оптимізації 66 Дослідна підпрограма 67 Крок прийняття рішення 68 Робочий крок 69 Крок меню ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 50 55 1. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини, що включає робочі органи, зокрема зернозбирального комбайна, що містить обчислювальний пристрій та щонайменше один дисплей, при цьому обчислювальний пристрій виконано з можливістю обробки даних, отриманих від бортових датчиків машини, зовнішніх даних і даних, які можуть бути збережені в пам'яті обчислювального пристрою, а також подолання критичних робочих режимів сільськогосподарської робочої машини (1) з урахуванням щонайменше одного вибору наявних у розпорядженні інформаційних даних (28-30), який відрізняється тим, що подолання критичних робочих режимів сільськогосподарської робочої машини (1) здійснюють шляхом оптимізації параметрів ефективності (37) сільськогосподарської машини (1) за допомогою інтерактивного зв'язку інтерфейсу між оператором (24) сільськогосподарської робочої машини (1) і системою (35) допомоги водієві, причому система (35) допомоги водієві у разі відхилення оптимізованих параметрів ефективності (37) здійснює оптимізацію альтернативного параметра ефективності (37). 2. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 1, який відрізняється тим, що оператор (24) сільськогосподарської робочої машини (1) ідентифікує критичний режим роботи і активізує систему (35) допомоги водієві або система (35) допомоги водієві активізується автоматично після ідентифікації критичного режиму роботи. 3. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 1 або 2, який відрізняється тим, що обробка наявних інформаційних даних (28-30) включає кроки: а) аналіз режиму роботи сільськогосподарської робочої машини (1) та ідентифікацію критичного режиму роботи, b) обробка тактичних шляхів рішення для подолання критичного робочого режиму сільськогосподарської робочої машини (1), що зберігається в пам'яті обчислювального пристрою (27), таким чином, що пропонуються оптимізовані робочі параметри (34) одного або кількох робочих органів (20); c) автоматичне або здійснюване оператором (24) установлення оптимізованих робочих параметрів (34), що виробляються на кроці b), на одному або кількох робочих органах (20) сільськогосподарської робочої машини (1), та експлуатація сільськогосподарської робочої машини (1) з оптимізованими робочими параметрами (34), і d) оцінка та перевірка робочого режиму сільськогосподарської робочої машини (1) після здійсненого установлення оптимізованих робочих параметрів (34) щонайменше на одному робочому органі (20). 4. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 3, який відрізняється тим, що після обробки кроку d) на кроці е) проводиться оцінка та перевірка протилежних параметрів ефективності (37) і/або якісних критеріїв (45). 5. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 4, який відрізняється тим, що оператор (24) сільськогосподарської робочої машини (1) може викликати повернення установлення оптимізованого робочого параметра (34), якщо один або кілька протилежних параметрів ефективності (37) і/або якісних критеріїв (45) перебувають поза межами допустимих значень. 9 UA 106583 C2 5 10 15 20 25 30 35 40 45 50 55 60 6. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 3, який відрізняється тим, що на кроці а) контролюються, щонайменше робочі параметри (34) робочих органів (20) сільськогосподарської робочої машини (1) і/або параметри ефективності (37) сільськогосподарської робочої машини (1), причому критичний робочий режим ідентифікується тоді, коли щонайменше один робочий параметр (34) і/або щонайменше один параметр ефективності (37) відхиляється від діапазонів припустимих значень, що зберігаються в пам'яті обчислювального пристрою (27), або оператор (24) оцінює параметр ефективності (37) як незадовільний. 7. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за будь-яким з із попередніх пунктів, який відрізняється тим, що на першому кроці (43) меню від оператора (24) сільськогосподарської робочої машини (1) запитується вибір підлягаючого оптимізації параметра ефективності (37). 8. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 7, який відрізняється тим, що на наступному кроці (44) меню від оператора (24) сільськогосподарської робочої машини (1) запитується вибір підлягаючого покращенню критерію якості (45), встановленого на першому кроці (43) меню параметра ефективності (37). 9. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за пп. 7 і 8, який відрізняється тим, що система (35) допомоги водієві в залежності від визначених оператором (24) сільськогосподарської робочої машини (1) параметрів ефективності (37) та стосовних до них критеріїв якості (45) пропонує оптимізований робочий параметр (34) для щонайменше одного робочого органу (20) і при цьому оператор (24) сільськогосподарської робочої машини (1) шляхом підтвердження або відхилення настройки оптимізованого робочого параметра (37) впливає на щонайменше один робочий орган (20). 10. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 9, який відрізняється тим, що після підтвердження настройки оптимізованого робочого параметра (34) на як мінімум одному робочому органі (20) сільськогосподарської робочої машини (1) проходить обмежена за часом неусталена фаза, при цьому на екрані дисплея (22) зміна одного або кількох параметрів ефективності (37) і/або критеріїв якості (45) візуально відображається у порівнянні із значеннями цих параметрів ефективності (37) і/або критеріїв якості (45) до зміни робочих параметрів (34). 11. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини и за п. 10, який відрізняється тим, що візуально відображені параметри ефективності (37) і/або критерії якості (45) в обчислювальному пристрої (27) поєднані функціональними залежностями з умовами збирання врожаю, так що змінювані в неусталеній фазі умови збирання врожаю враховуються при візуалізації параметрів ефективності (37) і/або критеріїв якості (45). 12. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 10 або 11, який відрізняється тим, що на наступному кроці (54) меню від оператора (24) сільськогосподарської робочої машини (1) запитується якісна оцінка зміни параметра ефективності (37) і/або критерію якості (45) і/або, що система (35) допомоги водієві здійснює оцінку автоматично та візуально відображує на екрані дисплея (22). 13. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 12, який відрізняється тим, що якісна оцінка обмежена значеннями "краще", "гірше" або "так само". 14. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 13, який відрізняється тим, що при відхиленні пропозиції способу вирішення задачі або при якісній оцінці "гірше" чи "так само" система (35) допомоги водієві пропонує оптимізацію альтернативного робочого параметра (37). 15. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 14, який відрізняється тим, що пропозиція базується на аналізі експертних знань, що зберігається в пам'яті обчислювального пристрою (27), при цьому експертні знання враховують взаємозв'язки між різними параметрами ефективності (37), критеріями якості (45) та робочими параметрами (34) робочих органів (20). 16. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 15, який відрізняється тим, що на наступному кроці (49) меню від оператора (24) сільськогосподарської робочої машини (1) запитується прийняття або відхилення оптимізації альтернативного робочого параметра (34) і при цьому 10 UA 106583 C2 5 10 15 20 25 30 оператор (24) сільськогосподарської робочої машини (1) шляхом підтвердження або відхилення впливає на оптимізацію альтернативного робочого параметра (34). 17. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 16, який відрізняється тим, що пропозиція прийняття оптимізованого робочого параметра (34) може бути поєднана з індикаційним повідомленням про вплив на одного або більше інших параметрів ефективності (37) і/або критеріїв якості (45). 18. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за будь-яким із попередніх пунктів, який відрізняється тим, що на результативному кроці меню на екрані дисплея (22) візуально відображається результат оптимізації. 19. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за будь-яким із попередніх пунктів, який відрізняється тим, що наявні параметри ефективності (37) включають "потік збираної продукції/зображення роботи машини" і/або "втрату зерна", і/або "сходовий продукт", і/або "якість зерна". 20. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 19, який відрізняється тим, що до параметра ефективності (37) "якість зерна" віднесені якісні критерії (45) "дроблене зерно" і/або "відділення від оболонок/відділення остей", і/або "чистота зерна". 21. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 19, який відрізняється тим, що до параметра ефективності (37) "маса, що повертається," віднесені якісні критерії (45) "кількість маси, що повертається" і/або "кількість зерна у масі, що повертається". 22. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 19, який відрізняється тим, що до параметра ефективності (37) "зернові втрати" віднесені якісні критерії (45) "зернові втрати на змінному робочому агрегаті" і/або "зернові втрати при сепаруванні", і/або "зернові втрати при очистці", і/або "зернові втрати при обмолоті". 23. Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини за п. 19, який відрізняється тим, щодо параметра ефективності (37) "потік збираної маси/схема роботи машини" віднесені якісні критерії (45) "жниварка" і/або "укладання валка", і/або "навісна соломорізка", і/або "розподільник подрібненої маси", і/або "приймальний канал", і/або "молотарка", і/або "сепарувальний пристрій". 11 UA 106583 C2 12 UA 106583 C2 13 UA 106583 C2 14 UA 106583 C2 15 UA 106583 C2 16 UA 106583 C2 17 UA 106583 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 18
ДивитисяДодаткова інформація
Автори англійськоюBAUMGARTEN JOACHIM, FITZNER WERNER, Neu Sebastian
Автори російськоюБаумгартен Иоахим, ФИТЦНЕР ВЕРНЕР
МПК / Мітки
МПК: A01D 41/127, A01F 12/16
Мітки: параметрів, оптимізації, сільськогосподарсько, експлуатації, водієві, машини, спосіб, допомоги, робочої, системі, ефективності
Код посилання
<a href="https://ua.patents.su/20-106583-sposib-ekspluataci-sistemi-dopomogi-vodiehvi-dlya-optimizaci-parametriv-efektivnosti-silskogospodarsko-robocho-mashini.html" target="_blank" rel="follow" title="База патентів України">Спосіб експлуатації системи допомоги водієві для оптимізації параметрів ефективності сільськогосподарської робочої машини</a>
Сільськогосподарська збиральна машина та спосіб експлуатації сільськогосподарської збиральної машини
Номер патенту: 100970
Опубліковано: 25.02.2013
Автори: Шейдлер Аллан Д., Рамп Бенджамін І.
МПК: A01F 7/00, A01F 12/00, A01D 43/10, A01D 41/12
Мітки: сільськогосподарська, експлуатації, сільськогосподарсько, збиральної, машина, спосіб, машини, збиральна
Формула / Реферат:
1. Сільськогосподарська збиральна машина, яка містить:основний силовий агрегат, виконаний з можливістю зчіплюватися принаймні з одним основним навантаженням, причому зазначене одне основне навантаження включає навантаження системи молотильного апарата; й допоміжний силовий агрегат, який є механічно незалежним від зазначеного основного силового агрегату, причому зазначений допоміжний силовий агрегат може зчіплюватися принаймні з однією...
Спосіб оптимізації режиму експлуатації системи водопостачання
Номер патенту: 41419
Опубліковано: 25.05.2009
Автор: Чорний Анатолій Петрович
Мітки: спосіб, оптимізації, водопостачання, експлуатації, режиму, системі
Формула / Реферат:
1. Спосіб оптимізації режиму експлуатації системи водопостачання, що містить насосну станцію та мережу, які обладнані регулюючим її режим пристроєм та приладами контролю параметрів, наприклад витратоміром, манометром або датчиком тиску, що полягає у регулюванні режиму її експлуатації по визначальному для системи параметру, який відрізняється тим, що регулювання режиму експлуатації системи водопостачання в період незначного або практично...
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом
Номер патенту: 22199
Опубліковано: 25.04.2007
Автор: Ланець Олексій Степанович
Мітки: машини, механічної, вібраційної, системі, спосіб, визначення, електромагнітним, коливальної, параметрів, приводом, тримасової
Формула / Реферат:
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом, згідно з яким за фіксованих двох коливальних мас вимірюють значення їх інерційних параметрів , а саме значення моменту інерції відносно власної центральної осі симетрії для крутильних коливань або значення маси для прямолінійних коливань, а значення...
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом
Номер патенту: 25771
Опубліковано: 27.08.2007
Автор: Ланець Олексій Степанович
Мітки: коливальної, механічної, електромагнітним, параметрів, машини, спосіб, тримасової, визначення, системі, вібраційної, приводом
Формула / Реферат:
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом, згідно з яким за фіксованих двох коливальних мас вимірюють значення їх інерційних параметрів Ω, а саме значення моменту інерції відносно власної центральної осі симетрії для крутильних коливань, або значення маси для прямолінійних коливань, встановлюють згідно з аналітичною залежністю значення інерційного параметра...
Спосіб визначення маси сільськогосподарської машини
Номер патенту: 83617
Опубліковано: 25.09.2013
Автори: Лебедєв Анатолій Тихонович, Кот Олександр Володимирович, Лебедєв Сергій Анатолійович, Артьомов Микола Прокопович
МПК: G01G 17/00
Мітки: спосіб, визначення, маси, сільськогосподарсько, машини
Формула / Реферат:
Спосіб визначення маси начіпної сільськогосподарської машини, що включає вимір поздовжнього прискорення руху тракторного агрегату, який відрізняється тим, що прискорення вимірюють на певному ґрунтовому фоні, наприклад на ґрунтовій дорозі, при вибігу (вимкнена муфта зчеплення) до повної зупинки трактора з сільськогосподарською машиною та без неї при однаковій швидкості початку вибігу.
Попередній патент: Обробний вузол
Наступний патент: Запірна планка для замків з пружинною защіпкою, зокрема з магнітною пружинною защіпкою
Випадковий патент: Спосіб одержання гідрохлориду 1(10)b-епокси-13-диметиламіно-5,7a,6,11b(н)-гвай-3(4)-єн-6,12-оліду, ліофілізованого протипухлинного засобу "арглабін"