Виявлення та демодуляція даних для систем безпровідного зв’язку
Формула / Реферат
1. Спосіб виявлення передач даних в системі безпровідного зв'язку з
колективним доступом, який полягає в тому, що:
визначають показник для гіпотетично прийнятої передачі даних;
визначають поріг для гіпотетичної передачі даних на основі вибірок, прийнятих
для гіпотетичної передачі даних; і
порівнюють показник з порогом для забезпечення вихідного сигналу, який
вказує, чи дійсно передачу даних вважають прийнятою.
2. Спосіб за п. 1, в якому при визначенні порога визначають поріг на основі
прийнятих символів пілот-сигналу для гіпотетичної передачі даних.
3. Спосіб за п. 2, в якому при визначенні порога визначають поріг на основі
прийнятих символів пілот-сигналу і прийнятих символів даних для гіпотетичної
передачі даних.
4. Спосіб за п. 1, в якому при визначенні показника визначають показник на
основі енергії сигналу гіпотетичної передачі даних.
5. Спосіб за п. 1, в якому при визначенні показника визначають показник на
основі множини прийнятих сигналів для множини антен і при визначенні порога
визначають поріг на основі множини прийнятих сигналів.
6. Спосіб за п. 1, в якому додатково:
обробляють прийняті символи даних для гіпотетично прийнятої передачі даних
для забезпечення повторно модульованих символів, які є оцінками переданих символів даних; і
при цьому при порівнянні обробляють прийняті символи даних і повторно
модульовані символи для забезпечення вихідного сигналу, який вказує, чи дійсно
передачу даних вважають прийнятою.
7. Спосіб за п. 6, в якому при обробці:
демодулюють прийняті символи даних для забезпечення відновлених символів;
декодують відновлені символи для забезпечення декодованих даних; і
повторно кодують декодовані дані для забезпечення повторно модульованих
символів.
8. Зчитуваний комп'ютером носій інформації, який містить інструкції для
виконання способу за будь-яким з пп. 1-7.
9. Пристрій в системі безпровідного зв'язку з колективним доступом, який
містить:
засіб для визначення показника для гіпотетично прийнятої передачі даних;
засіб для визначення порога для гіпотетичної передачі даних на основі вибірок,
прийнятих для гіпотетичної передачі даних; і
засіб для порівняння показника з порогом для забезпечення вихідного сигналу,
який вказує, чи дійсно передачу даних вважають прийнятою.
10. Пристрій за п. 9, в якому поріг визначають на основі прийнятих символів
пілот-сигналу для гіпотетичної передачі даних.
11. Пристрій за п. 10, в якому поріг додатково визначають на основі прийнятих
символів даних для гіпотетичної передачі даних.
12. Пристрій за п. 9, в якому показник має відношення до енергії сигналу
гіпотетичної передачі даних.
13. Пристрій за п. 9, в якому засіб для визначення показника виконаний з
можливістю визначення показника на основі множини прийнятих сигналів для
множини антен, і при цьому засіб для визначення порога виконаний з можливістю
визначення порога на основі множини прийнятих сигналів.
14. Пристрій за п. 9, який додатково містить:
засіб для обробки прийнятих символів даних для гіпотетично прийнятої передачі даних для забезпечення повторно модульованих символів, які є оцінками переданих символів даних; і
при цьому засіб для порівняння містить засіб для обробки прийнятих символів
даних і повторно модульованих символів для забезпечення вихідного сигналу
детектора, який вказує, чи дійсно передачу даних вважають прийнятою.
15. Пристрій за п. 14, в якому засіб для обробки містить:
засіб для демодулювання прийнятих символів даних для забезпечення
відновлених символів;
засіб для декодування відновлених символів для забезпечення декодованих
даних; і
засіб для повторного кодування декодованих даних для забезпечення повторно модульованих символів.
16. Процесор, виконаний з можливістю виконання інструкцій для виконання
способу виявлення передач даних у системі безпровідного зв'язку з колективним
доступом, причому спосіб полягає в тому, що:
визначають показник для гіпотетично прийнятої передачі даних;
визначають поріг для гіпотетичної передачі даних на основі вибірок, прийнятих
для гіпотетичної передачі даних; і
порівнюють показник з порогом для забезпечення вихідного сигналу, що
вказує, чи дійсно передачу даних вважають прийнятою.
17. Процесор за п. 16, у якому визначення порога полягає в тому, що визначають поріг на основі прийнятих символів пілот-сигналу для гіпотетичної передачі даних.
18. Процесор за п. 17, у якому визначення порога полягає в тому, що визначають поріг на основі прийнятих символів пілот-сигналу й прийнятих символів
даних для гіпотетичної передачі даних.
19. Процесор за п. 16, у якому визначення показника полягає в тому, що
визначають показник на основі енергії сигналу гіпотетичної передачі даних.
20. Процесор за п. 16, у якому визначення показника полягає в тому, що визначають показник на основі множини прийнятих сигналів для множини антен і при визначенні порога визначають поріг на основі множини прийнятих сигналів.
21. Процесор за п. 16, у якому спосіб додатково полягає в тому, що:
обробляють прийняті символи даних для гіпотетично прийнятої передачі даних для забезпечення повторно модульованих символів, які є оцінками переданих символів даних; і
при цьому при порівнянні обробляють прийняті символи даних і повторно
модульовані символи для забезпечення вихідного сигналу, який вказує, чи дійсно
передачу даних вважають прийнятою.
22. Процесор за п. 21, у якому обробка полягає в тому, що:
демодулюють прийняті символи даних для забезпечення відновлених символів;
декодують відновлені символи для забезпечення декодованих даних; і
повторно кодують декодовані дані для забезпечення повторно модульованих
символів.
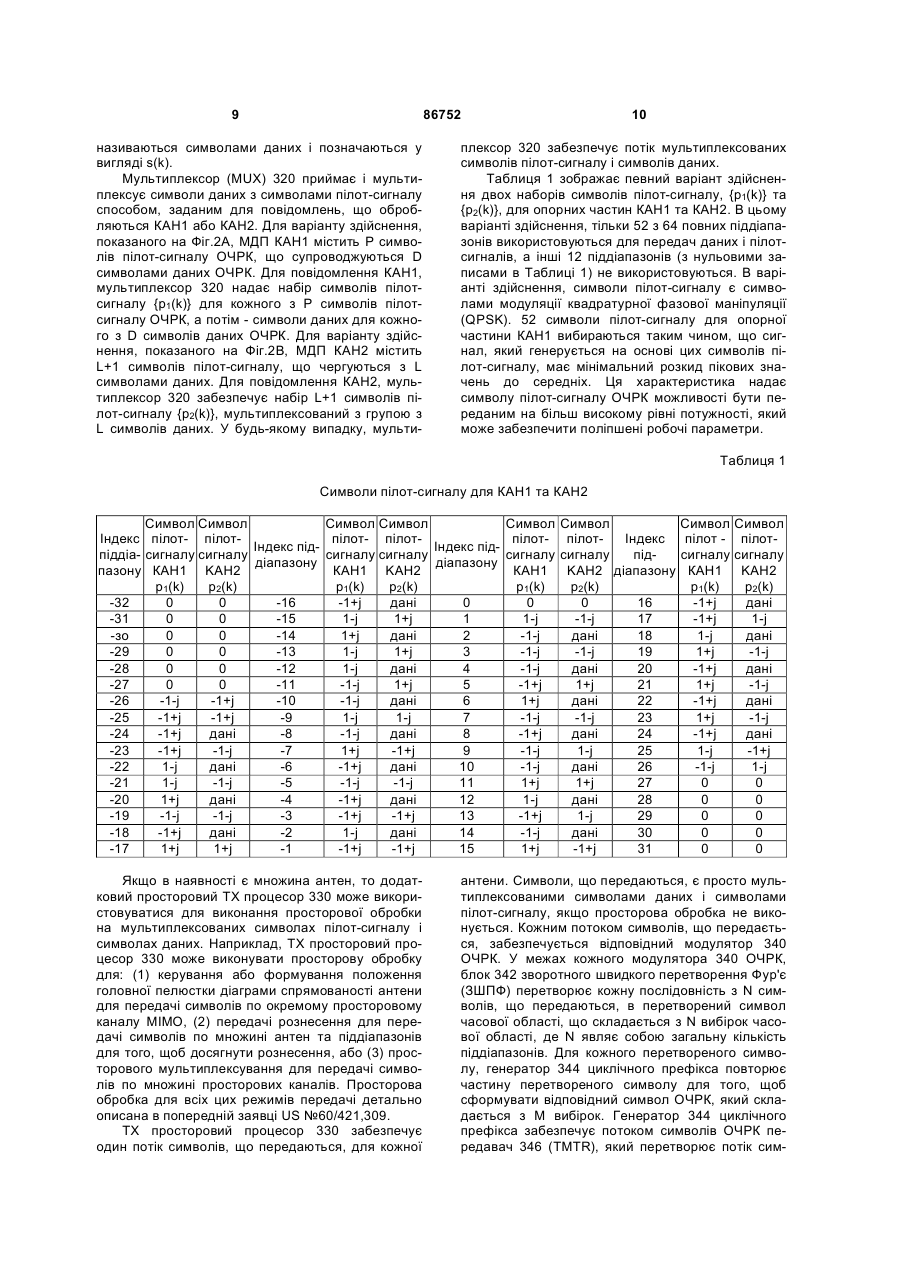
Текст
1. Спосіб виявлення передач даних в системі безпровідного зв'язку з колективним доступом, який полягає в тому, що: визначають показник для гіпотетично прийнятої передачі даних; визначають поріг для гіпотетичної передачі даних на основі вибірок, прийнятих для гіпотетичної передачі даних; і порівнюють показник з порогом для забезпечення вихідного сигналу, який вказує, чи дійсно передачу даних вважають прийнятою. 2. Спосіб за п. 1, в якому при визначенні порога визначають поріг на основі прийнятих символів пілот-сигналу для гіпотетичної передачі даних. 3. Спосіб за п. 2, в якому при визначенні порога визначають поріг на основі прийнятих символів пілот-сигналу і прийнятих символів даних для гіпотетичної передачі даних. 4. Спосіб за п. 1, в якому при визначенні показника визначають показник на основі енергії сигналу гіпотетичної передачі даних. 5. Спосіб за п. 1, в якому при визначенні показника визначають показник на 2 (19) 1 3 86752 4 13. Пристрій за п. 9, в якому засіб для визначення показника виконаний з можливістю визначення показника на основі множини прийнятих сигналів для множини антен, і при цьому засіб для визначення порога виконаний з можливістю визначення порога на основі множини прийнятих сигналів. 14. Пристрій за п. 9, який додатково містить: засіб для обробки прийнятих символів даних для гіпотетично прийнятої передачі даних для забезпечення повторно модульованих символів, які є оцінками переданих символів даних; і при цьому засіб для порівняння містить засіб для обробки прийнятих символів даних і повторно модульованих символів для забезпечення вихідного сигналу детектора, який вказує, чи дійсно передачу даних вважають прийнятою. 15. Пристрій за п. 14, в якому засіб для обробки містить: засіб для демодулювання прийнятих символів даних для забезпечення відновлених символів; засіб для декодування відновлених символів для забезпечення декодованих даних; і засіб для повторного кодування декодованих даних для забезпечення повторно модульованих символів. 16. Процесор, виконаний з можливістю виконання інструкцій для виконання способу виявлення передач даних у системі безпровідного зв'язку з колективним доступом, причому спосіб полягає в тому, що: визначають показник для гіпотетично прийнятої передачі даних; визначають поріг для гіпотетичної передачі даних на основі вибірок, прийнятих для гіпотетичної передачі даних; і порівнюють показник з порогом для забезпечення вихідного сигналу, що вказує, чи дійсно передачу даних вважають прийнятою. 17. Процесор за п. 16, у якому визначення порога полягає в тому, що визначають поріг на основі прийнятих символів пілот-сигналу для гіпотетичної передачі даних. 18. Процесор за п. 17, у якому визначення порога полягає в тому, що визначають поріг на основі прийнятих символів пілот-сигналу й прийнятих символів даних для гіпотетичної передачі даних. 19. Процесор за п. 16, у якому визначення показника полягає в тому, що визначають показник на основі енергії сигналу гіпотетичної передачі даних. 20. Процесор за п. 16, у якому визначення показника полягає в тому, що визначають показник на основі множини прийнятих сигналів для множини антен і при визначенні порога визначають поріг на основі множини прийнятих сигналів. 21. Процесор за п. 16, у якому спосіб додатково полягає в тому, що: обробляють прийняті символи даних для гіпотетично прийнятої передачі даних для забезпечення повторно модульованих символів, які є оцінками переданих символів даних; і при цьому при порівнянні обробляють прийняті символи даних і повторно модульовані символи для забезпечення вихідного сигналу, який вказує, чи дійсно передачу даних вважають прийнятою. 22. Процесор за п. 21, у якому обробка полягає в тому, що: демодулюють прийняті символи даних для забезпечення відновлених символів; декодують відновлені символи для забезпечення декодованих даних; і повторно кодують декодовані дані для забезпечення повторно модульованих символів. Галузь техніки, до якої відноситься винахід Даний винахід взагалі відноситься до передачі даних, і більш конкретно, до способів виявлення та демодуляції передач даних в системах безпровідного зв'язку. Рівень техніки У системі безпровідного зв'язку дані, що передаються, звичайно обробляються (наприклад, кодуються та модулюються), і потім зазнають перетворення з підвищенням частоти в радіочастотний (РЧ, RF) сигнал несучої для генерування РЧ - модульованого сигналу, який є більш придатним для передачі по безпровідному каналу. РЧ - модульований сигнал потім передається від передавача і може прийти в приймач через множину шляхів поширення в безпровідному каналі. Характеристики шляхів поширення згодом звичайно змінюються через множину факторів, таких як, наприклад, за гасання, багатопроменеве поширення і зовнішні перешкоди. Отже, РЧ - модульований сигнал може відчувати вплив різних умов (станів) каналу (наприклад, різних ефектів загасання та багатопроменевих ефектів) і може бути зв'язаний з різними складовими вигодами через робочу смугу пропускання системи. Для досягнення високої ефективності, пілотсигнал (тобто опорний сигнал) часто передається передавачем, щоб допомогти приймачу у виконанні множини функцій. Пілот-сигнал звичайно генерується на основі відомих символів і обробляється відомим способом. Пілот-сигнал може використовуватися приймачем для оцінки каналу передачі, захоплення синхронізації і частоти, когерентної демодуляції і тощо. Часто буває бажано або необхідно виявити наявність передач даних в прийнятому сигналі. 5 Виявлення передач даних звичайно досягається обробкою пілот-сигналу для кожної гіпотетичної прийнятої передачі даних. Якщо енергія пілотсигналу більше, ніж певний поріг, то гіпотетична передача даних обробляється додатково (наприклад, демодулюється і декодується). У такому випадку для того, щоб визначити, чи була передача даних декодована правильно або з помилками, звичайно покладаються на код з виявленням помилок, такий як циклічний надмірний код (CRC). У деяких системах безпровідного зв'язку, виявлення, основаного на одному тільки пілотсигналі, недостатньо. Це може мати місце, наприклад, при функціонуванні з низьким одержаним відношенням сигнал-шум (ВСШ, SNR). Крім того, код з виявленням помилок може бути недоступним при використанні для підтвердження правильності прийнятої передачі даних. Тому в рівні техніки для таких систем безпровідного зв'язку існує потреба в способах виявлення та демодулювання передач даних. Суть винаходу Запропоновані способи виявлення та демодуляції передач даних в системах безпровідного зв'язку. В одному аспекті, забезпечується детектор з керування за рішенням для виявлення передач даних в прийнятому сигналі. Цей детектор використовує прийняті символи даних, а також прийняті символи пілот-сигналу для виконання виявлення, і таким чином є здатним до забезпечення поліпшеного виконання виявлення. Детектор з керування за рішенням може бути призначений для функціонування в частотній області або у часовій області. Для систем, що використовують модуляцію з багатьма несучими (наприклад, ортогональне частотне розділення (ущільнення) каналів - ОЧРК, OFDM), детектор може бути призначений для виконання диференціального виявлення в частотній області, або когерентне виявлення у часовій області, обидва з яких детально описані нижче. В іншому аспекті, адаптивний поріг використовують для виконання виявлення прийнятих передач даних. Поріг може бути визначений для кожної гіпотетичної прийнятої передачі даних. Поріг може бути обчислений, наприклад, на основі повної енергії прийнятого сигналу (тобто, сигнал плюс шум плюс перешкоди) гіпотетичної передачі даних. Використання адаптивного порога може забезпечити стійкі параметри виявлення в багатьох робочих середовищах, таких як неліцензований діапазон частот, в якому можуть бути присутніми різні джерела перешкод. Різні аспекти та варіанти здійснення винаходу детально описані нижче. Наприклад, тут також описані структури приймача для різних схем передачі. Короткий опис креслень Ознаки, характер та переваги даного винаходу стануть більш очевидними з сформульованого нижче докладного опису, розглянутого спільно з кресленнями, в яких однакові номери позицій відповідно по всьому тексту співпадають і на яких: Фіг.1 зображає систему безпровідного зв'язку; 86752 6 Фіг.2А та 2В зображають звичайні модулі даних протоколу (МДП, PDU) для каналів 1 та 2, відповідно; Фіг.3А зображає блок-схему блока передавача; Фіг.3В ілюструє символ ОЧРК; Фіг.4 зображає блок-схему блока приймача; Фіг.5 зображає кореляційний детектор; Фіг.6 зображає варіант здійснення кореляційного детектора; Фіг.7 зображає детектор/демодулятор даних, який включає в себе демодулятор даних і детектор з керування за рішенням; Фіг.8А зображає варіант здійснення демодулятора даних; Фіг.8В зображає детектор з керування за рішенням, який виконує диференціальне виявлення в частотній області; Фіг.8С зображає детектор з керування за рішенням, який виконує когерентне виявлення у часовій області; Фіг.9 зображає блок-схему точки доступу і термінала користувача; Фіг.10А та 10В зображають звичайні передачі по каналах 1 та 2 відповідно; і Фіг.11А та 11В зображають обробку приймача для каналів 1 та 2 відповідно. Докладний опис Слово "звичайний" використовується тут в значенні "такий, який слугує прикладом, зразком або ілюстрацією". Будь-який варіант здійснення, описаний тут як "звичайний" не обов'язково повинен тлумачитися як пріоритетний або переважний по відношенню до інших варіантів здійснення. Фіг.1 зображає систему безпровідного зв'язку 100, яка включає в себе множину точок доступу (ТД, АР) 110, які обмінюються інформацією з множиною терміналів користувача (ТК, UT) 120. (Для простоти на Фіг.1 зображена тільки одна точка доступу). Точка доступу також може називатися базовою станцією або будь-якими іншими термінами. Кожний термінал користувача може бути стаціонарним або мобільним терміналом і також може називатися терміналом доступу, мобільною станцією, віддаленою станцією, обладнанням користувача (OK, UE), безпровідним пристроєм або будь-якими іншими термінами. Кожний термінал користувача в будь-який заданий момент може обмінюватися інформацією з однією або, можливо, множиною точок доступу по низхідній і/або висхідній лінії зв'язку. Низхідна лінія зв'язку (тобто пряма лінія зв'язку), відноситься до передачі від точки доступу до термінала користувача, а висхідна лінія зв'язку (тобто зворотна лінія зв'язку) відноситься до передачі від термінала користувача до точки доступу. Описані тут способи для виявлення та демодуляції передачі даних, можуть використовуватися в різних системах безпровідного зв'язку. Наприклад, ці способи можуть використовуватися в системах, які використовують (1) одну або множину антен для передачі даних, і одну або множину антен для прийому даних, (2) різні способи модуляції (наприклад, множинний (колективний) доступ з кодовим розділенням каналів (МДКР, CDMA, ОЧРК 7 і так далі), і (3) один або множину частотних діапазонів для низхідної і висхідної ліній зв'язку). Для розуміння, нижче детально описуються способи для звичайної системи безпровідного зв'язку. У цій системі приймач обладнаний множиною (Т) антен для прийому даних, і передавач може бути обладнаний однією або множиною антен. Система додатково використовує ортогональне частотне розділення (ущільнення) (ОЧРК), яке ефективно розділяє повну ширину смуги пропускання системи на множину (N) ортогональних піддіапазонів. При ОЧРК дані або пілот-сигнал, які будуть передані в кожному піддіапазоні, спочатку зазнають модулювання (тобто символ перетворюється), використовуючи певну схему модуляції. Нульовими значеннями сигналів забезпечуються піддіапазони, що не використовуються для передачі даних/пілот-сигналу. Для кожного періоду символу ОЧРК, символи модуляції і нульові значення сигналів для всіх N піддіапазонів перетворюються у часову область, використовуючи зворотне швидке перетворення Фур'є (ЗШПФ, IFFT), щоб одержати перетворений символ, який містить N вибірок часової області. Для боротьби з міжсимвольними перешкодами (МСП, ISI), частину кожного перетвореного символу часто повторюють для формування відповідного символу ОЧРК, який потім передають по безпровідному каналу. Період символу ОЧРК (або просто період символу) відповідає тривалості одного символу ОЧРК, який є найменшим елементом передачі для системи. В одному конкретному проекті, ширина смуги пропускання системи становить 20МГц, N=64, піддіапазонам призначені індекси від -32 до +31, тривалість кожного перетвореного символу становить 3,2 пікосекунди (пс), циклічний префікс дорівнює 800 наносекунд (нс), і тривалість кожного символу ОЧРК дорівнює 4,0 мікросекундам (мкс). Для розуміння, нижче описуються дві конкретних схеми передачі і дві структури приймача. Перша схема передачі використовується для транспортного каналу 1 (або просто каналу 1 або КАН1, СН1) і має наступні характеристики: (1) передачі по каналу 1 не містять часової компенсації в передавачі і досягають довільних тривалостей в приймачі, і (2), кожна передача по каналу 1 включає в себе множину символів ОЧРК для даних і пілотсигналу. Друга схема передачі використовується для транспортного каналу 2 (або просто каналу 2 або КАН2, СН2) і має наступні характеристики: (1) передачі по каналу 2 містять часову компенсацію в передавачі і досягають синхронізації за часом в межах часового інтервалу в приймачі, і (2), кожна передача по каналу 2 включає в себе єдиний символ ОЧРК як для даних, так і для пілот-сигналу. Повільні і швидкі канали з довільним доступом з характеристиками, подібними характеристикам каналів 1 та 2, описані в заявці на патент US №60/432440. Фіг.2А зображає звичайний модуль даних протоколу (МДП) 210, який може використовуватися для каналу 1 (МДП КАН1). МДП КАН1 210 містить опорну частину 220, яка розділена за часом за допомогою часового розділення сигналів (TDM) з частиною повідомлення КАН1 230. Опорна части 86752 8 на 220 включає в себе Ρ символів 222 пілотсигналу ОЧРК, де Ρ може бути будь-яким цілим числом: одиницею або більше. Символи пілотсигналу ОЧРК використовуються для полегшення захоплення і виявлення передачі КАН1, а також для допомоги в когерентній демодуляції частини повідомлення KAH1. Частина повідомлення КАН1 230 включає в себе D символів 232 даних ОЧРК, де D може бути будь-яким цілим числом: одиницею або більше. Символи пілот-сигналу ОЧРК і символи даних ОЧРК можуть генеруватися як описано нижче. Фіг.2В зображає звичайний МДП 250, який може використовуватися для каналу 2 (МДП КАН2). МДП КАН2 250 містить опорну частину 260, яка являє собою піддіапазон, мультиплексований з частиною 270 повідомлення КАН2. Опорна частина 260 містить набір символів пілот-сигналу, який передається в одному наборі піддіапазонів (показаних на Фіг.2В як заштриховані піддіапазони). Частина 270 повідомлення КАН2 містить групу символів даних, яка передається в іншому наборі піддіапазонів. Символи даних генеруються за допомогою кодування, перемежування та перетворення символів повідомлення 280 КАН2. Мультиплексовані в частотній області символи пілотсигналу і символи даних обробляються для генерування МДП КАН2 250 часової області, як описано нижче. У варіанті здійснення, показаному на Фіг.2В, піддіапазони пілот-сигналу та піддіапазони даних чергуються таким чином, що кожний піддіапазон даних обрамовується з обох сторін піддіапазонами пілот-сигналу. Символи пілот-сигналу, що передаються в піддіапазонах пілот-сигналу, можуть використовуватися для оцінки відповідей каналу для піддіапазонів даних і для когерентної демодуляції. Також, без виходу за рамки обсягу винаходу, можуть бути реалізовані інші схеми мультиплексування піддіапазону. Наприклад, кожна група з Q піддіапазонів даних може обрамовуватися з обох сторін піддіапазонами пілот-сигналу, де Q може бути будь-яким позитивним цілим числом. Фіг.3А зображає блок-схему варіанту здійснення блока передавача 300, який може виконувати обробку даних, що передаються для описаних вище каналів 1 та 2. Блок передавача 300, який може бути здійснений в межах точки доступу або термінала користувача, включає в себе процесор 310 даних, що передаються (ТХ), додатковий ТХ просторовий процесор 330, і один модулятор 340 ОЧРК для кожної передавальної антени. У межах процесора 310 ТХ даних, генератор 312 CRC приймає дані для повідомлення КАН1 або КАН2 і (необов'язково) генерує значення CRC для повідомлення. Кодер 314 потім кодує дані повідомлень і значення CRC (якщо воно міститься) відповідно до певної схеми кодування, забезпечуючи кодові біти. Потім перемежувач 316 перемежує (тобто переупорядковує) кодові біти на основі певної схеми перемежування для забезпечення частотного і, можливо, часового рознесення. Потім блок 318 перетворення символів перетворює переміжені дані відповідно до певної схеми модуляції, забезпечуючи символи модуляції, які також 9 86752 називаються символами даних і позначаються у вигляді s(k). Мультиплексор (MUX) 320 приймає і мультиплексує символи даних з символами пілот-сигналу способом, заданим для повідомлень, що обробляються КАН1 або КАН2. Для варіанту здійснення, показаного на Фіг.2А, МДП КАН1 містить Ρ символів пілот-сигналу ОЧРК, що супроводжуються D символами даних ОЧРК. Для повідомлення КАН1, мультиплексор 320 надає набір символів пілотсигналу {р1(k)} для кожного з Ρ символів пілотсигналу ОЧРК, а потім - символи даних для кожного з D символів даних ОЧРК. Для варіанту здійснення, показаного на Фіг.2В, МДП КАН2 містить L+1 символів пілот-сигналу, що чергуються з L символами даних. Для повідомлення КАН2, мультиплексор 320 забезпечує набір L+1 символів пілот-сигналу {р2(k)}, мультиплексований з групою з L символів даних. У будь-якому випадку, мульти 10 плексор 320 забезпечує потік мультиплексованих символів пілот-сигналу і символів даних. Таблиця 1 зображає певний варіант здійснення двох наборів символів пілот-сигналу, {р1(k)} та {р2(k)}, для опорних частин КАН1 та КАН2. В цьому варіанті здійснення, тільки 52 з 64 повних піддіапазонів використовуються для передач даних і пілотсигналів, а інші 12 піддіапазонів (з нульовими записами в Таблиці 1) не використовуються. В варіанті здійснення, символи пілот-сигналу є символами модуляції квадратурної фазової маніпуляції (QPSK). 52 символи пілот-сигналу для опорної частини КАН1 вибираються таким чином, що сигнал, який генерується на основі цих символів пілот-сигналу, має мінімальний розкид пікових значень до середніх. Ця характеристика надає символу пілот-сигналу ОЧРК можливості бути переданим на більш високому рівні потужності, який може забезпечити поліпшені робочі параметри. Таблиця 1 Символи пілот-сигналу для КАН1 та КАН2 Символ Символ Індекс пілот- пілотІндекс підпіддіа- сигналу сигналу діапазону пазону КАН1 KAH2 р1(k) p2(k) -32 0 0 -16 -31 0 0 -15 -зо 0 0 -14 -29 0 0 -13 -28 0 0 -12 -27 0 0 -11 -26 -1-j -1+j -10 -25 -1+j -1+j -9 -24 -1+j дані -8 -23 -1+j -1-j -7 -22 1-j дані -6 -21 1-j -1-j -5 -20 1+j дані -4 -19 -1-j -1-j -3 -18 -1+j дані -2 -17 1+j 1+j -1 Символ Символ пілот- пілотІндекс підсигналу сигналу діапазону КАН1 KAH2 р1(k) p2(k) -1+j дані 0 1-j 1+j 1 1+j дані 2 1-j 1+j 3 1-j дані 4 -1-j 1+j 5 -1-j дані 6 1-j 1-j 7 -1-j дані 8 1+j -1+j 9 -1+j дані 10 -1-j -1-j 11 -1+j дані 12 -1+j -1+j 13 1-j дані 14 -1+j -1+j 15 Якщо в наявності є множина антен, то додатковий просторовий ТХ процесор 330 може використовуватися для виконання просторової обробки на мультиплексованих символах пілот-сигналу і символах даних. Наприклад, ТХ просторовий процесор 330 може виконувати просторову обробку для: (1) керування або формування положення головної пелюстки діаграми спрямованості антени для передачі символів по окремому просторовому каналу ΜΙΜΟ, (2) передачі рознесення для передачі символів по множині антен та піддіапазонів для того, щоб досягнути рознесення, або (3) просторового мультиплексування для передачі символів по множині просторових каналів. Просторова обробка для всіх цих режимів передачі детально описана в попередній заявці US №60/421,309. ТХ просторовий процесор 330 забезпечує один потік символів, що передаються, для кожної Символ пілотсигналу КАН1 р1(k) 0 1-j -1-j -1-j -1-j -1+j 1+j -1-j -1+j -1-j -1-j 1+j 1-j -1+j -1-j 1+j Символ пілотІндекс сигналу підKAH2 діапазону p2(k) 0 16 -1-j 17 дані 18 -1-j 19 дані 20 1+j 21 дані 22 -1-j 23 дані 24 1-j 25 дані 26 1+j 27 дані 28 1-j 29 дані 30 -1+j 31 Символ Символ пілот - пілотсигналу сигналу КАН1 KAH2 р1(k) p2(k) -1+j дані -1+j 1-j 1-j дані 1+j -1-j -1+j дані 1+j -1-j -1+j дані 1+j -1-j -1+j дані 1-j -1+j -1-j 1-j 0 0 0 0 0 0 0 0 0 0 антени. Символи, що передаються, є просто мультиплексованими символами даних і символами пілот-сигналу, якщо просторова обробка не виконується. Кожним потоком символів, що передається, забезпечується відповідний модулятор 340 ОЧРК. У межах кожного модулятора 340 ОЧРК, блок 342 зворотного швидкого перетворення Фур'є (ЗШПФ) перетворює кожну послідовність з N символів, що передаються, в перетворений символ часової області, що складається з N вибірок часової області, де N являє собою загальну кількість піддіапазонів. Для кожного перетвореного символу, генератор 344 циклічного префікса повторює частину перетвореного символу для того, щоб сформувати відповідний символ ОЧРК, який складається з Μ вибірок. Генератор 344 циклічного префікса забезпечує потоком символів ОЧРК передавач 346 (TMTR), який перетворює потік сим 11 волів ОЧРК в один або більшу кількість аналогових сигналів і додатково посилює, фільтрує і піддає перетворенню з підвищенням частоти аналоговий сигнал (сигнали) для того, щоб згенерувати РЧ модульований сигнал, який потім передається від зв'язаної антени 350. Фіг.3В ілюструє символ ОЧРК, який складений з двох частин: циклічного префікса і перетвореного символу. У варіанті здійснення, N=64, циклічний префікс містить 16 вибірок і кожний символ ОЧРК містить М=80 вибірок. Циклічний префікс є копією останніх 16 вибірок (тобто циклічним продовженням) перетвореного символу і вставляється перед перетвореним символом. Циклічний префікс гарантує, що символ ОЧРК зберігає свої властивості ортогональності при наявності запізнення внаслідок багатопроменевого поширення. Фіг.10А зображає звичайну передачу по каналу 1. Часовий графік для каналу 1 поділяється на інтервали КАН1, причому кожний інтервал КАН1 має певну тривалість (наприклад, P+D періодів символу ОЧРК). У варіанті здійснення, один МДП КАН1 може бути переданий по кожному інтервалу КАН1. Часові та частотні характеристики терміналів користувача А та В фіксуються по відношенню до аналогічних характеристик системи. Це може бути досягнуто за допомогою прийому передачі (наприклад, пілот-сигналу запитувача), який є несучим або вкладеним для синхронізуючої інформації. Потім термінали користувача встановлюють свою синхронізацію на основі прийнятої синхронізуючої інформації. Однак синхронізація кожного термінала користувача може бути порушена (або затримана) відносно синхронізації системи, причому величина порушень звичайно відповідає затримці поширення для передачі, яка містить синхронізуючу інформацію. Якщо як термінали користувача, так і система приймають свою синхронізуючу інформацію від загального джерела часу (наприклад, Глобальної Системи Позиціонування - GPS), то порушень синхронізації між цими об'єктами може і не бути. На Фіг.10А, термінали користувача А та В (наприклад, безсистемно) вибирають два різних інтервали КАН1 (наприклад, інтервали 3 та 1 відповідно) для того, щоб передати свої МДП КАН1. Оскільки термінали користувача А та В є зв'язаними з різними порушеннями синхронізації і різними затримками поширення, їх МДП КАН1 досягають точки доступу з різними затримками (які називаються двосторонніми затримками (затримками на проходження сигналу в прямому і зворотному напрямку або RTD) по відношенню до меж інтервалів точки доступу КАН1. Фіг.10В зображає звичайну передачу по каналу 2. Часовий графік для каналу 2 поділяється на інтервали КАН2, причому кожний інтервал КАН2 має певну тривалість (наприклад, один період символу ОЧРК). У варіанті здійснення, один МДП КАН1 може бути переданий по кожному інтервалу КАН1. Один МДП КАН2 може бути переданий по кожному інтервалу КАН2. На Фіг.10В, часові характеристики терміналів користувача А та В зафіксовані по відношенню до 86752 12 аналогічних характеристик системи і ці термінали додатково мають інформацію про їх RTD, яка може бути визначена точкою доступу (наприклад, під час звернення до системи) і передана назад на термінали користувача. Термінали користувача після цього можуть відрегулювати свою синхронізацію, що передається, для обчислення їх RTD таким чином, щоб їх МДП КАН2 досягали в точці доступу узгодження за часом з вибраними межами інтервалу КАН2. На Фіг.10В, термінали користувача А та В (наприклад, безсистемно) вибирають інтервали 3 та 1 КАН2 відповідно для того, щоб передати свої МДП КАН2. Оскільки передачі терміналів користувача А та В компенсовані за часом, МДП КАН2 досягають точки доступу приблизно пригнаними до меж вибраних інтервалів КАН2, як показано на Фіг.10В. Фіг.4 зображає блок-схему варіанту здійснення блока приймача 400, який може виконувати описану вище обробку прийнятих даних для каналів 1 та 2. Блок приймача 400, який також може бути реалізований в межах точки доступу або термінала користувача, включає в себе один приймач (RCVR) 410 для кожної з Τ приймальних антен 408, детектор/демодулятор даних 420, і процесор 450 прийнятих (RX) даних. Кожна антена 408 приймає РЧ - модульовані сигнали, що передаються блоком передавача, і забезпечує прийнятими сигналами відповідний приймач 410. Кожний приймач 410 адаптує (наприклад, посилює, фільтрує і піддає перетворенню з пониженням частоти) прийнятий ним сигнал, і переводить адаптований сигнал в цифрову форму для забезпечення вибірок, які означаються як хі(n). Детектор/демодулятор даних 420 включає в себе демодулятор 430 даних і детектор 440, які приймають та обробляють вибірки від всіх приймачів 410 для того, щоб виявити та демодулювати передачі даних по каналах 1 та 2. Обробка блоком 420 більш детально описується нижче. Блок 420 забезпечує відновлення символів даних, що ˆ позначаються як s(k ) , які є оцінками переданих символів даних s(k). У межах процесора 450 RX даних, відновлені символи даних зазнають зворотного перетворення блоком 452 зворотного перетворення символів, зворотного перемежування блоком 454 зворотного перемежування і декодування декодером 456 для постачання декодованими даними повідомлень КАН1 та КАН2. Якщо відновлене повідомлення включає в себе значення CRC, то блок 458 перевірки CRC перевіряє повідомлення зі значенням CRC для визначення того, чи було воно декодоване правильно або з помилкою. Фіг.11А зображає обробку прийнятих даних для каналу 1, які не містять часової компенсації. Звернувшись назад до Фіг.10А, побачимо, що незважаючи на те, що блоки передавача намагаються здійснити передачу в певних інтервалах КАН1, передачі КАН1 не містять часової компенсації, і результуюча поведінка каналу 1 подібна до поведінки каналу, не розділеного на часові інтервали. У цьому випадку, звернувшись назад до Фіг.11А, побачимо, що блок приймача може використати стежний кореляційний детектор для виявлення 13 передач для КАН1, кожна з яких може бути прийнята, починаючи з будь-якого періоду вибірки. Кореляційний детектор, який може функціонувати у часовій області, здійснює слідкування по всьому часовому діапазону, в якому МДП КАН1 можуть бути прийняті, один період вибірки одночасно. Вікно виявлення вказує період часу, в якому вибірки для одного МДП КАН1 повинні бути оброблені детектором. Це вікно виявлення може ініціалізувати на початок першого інтервалу КАН1 і потім ковзати уперед на один період вибірки за раз. Для кожного періоду вибірки, який відповідає гіпотезі, кореляційний детектор обробляє вибірки в межах вікна виявлення, визначаючи показник для гіпотетичного прийнятого МДП КАН1, починаючи з цього періоду вибірки. Якщо показник перевищує поріг КАН1, то МДП КАН1 додатково декодується для відновлення повідомлення КАН1. Показник може мати відношення до енергії сигналу або деяких інших параметрів. Поріг КАН1 може бути фіксованим або адаптивним (наприклад, динамічно визначатися на основі вибірок в межах вікна виявлення). Фіг.5 зображає блок-схему кореляційного детектора 440а, який являє собою один варіант здійснення детектора 440, представленого на Фіг.4. Вибірками хі(n) для кожної з Τ приймальних антен забезпечується відповідний процесор 510 антени. У межах кожного процесора 510, накопичувальний суматор 520 символів приймає і накопичує вибірки для поточної гіпотези і забезпечує накопиченими вибірками ~i (n) лінію затримки/буфер 530. Для x МДП КАН1, показаного на Фіг.2А, накопичувальний суматор 520 символів виконує накопичення Ρ символів пілот-сигналу ОЧРК, причому накопичення виконується на вибірковій основі, забезпечуючи накопичення символів пілот-сигналу ОЧРК, що мають Μ вибірок. Лінія затримки/буфер 530 забезпечує зберігання для N з Μ вибірок і фактично відкидає Μ-Ν вибірок для циклічного префікса. Ці N вибірок для перетвореного символу є відповідними накопиченому символу пілот-сигналу ОЧРК. Потім детектор 540 сигналу визначає показник для накопиченого символу пілот-сигналу ОЧРК. У варіанті здійснення і як описано нижче, показник відноситься до енергії сигналу N вибірок для накопиченого символу пілот-сигналу ОЧРК. Однак без виходу за рамки обсягу винаходу також може використовуватися інший показник. Блок 550 обчислення адаптивного порога визначає величину адаптивного порога Yi(n) для використання при визначенні того, чи дійсно передача КАН1 була прийнята. Суматор 560 підсумовує порогові величини для всіх Τ антен, щоб забезпечити сукупну порогову величину Ytot(n), яка додатково масштабується з масштабним коефіцієнтом S1 за допомогою помножувача 562 для того, щоб одержати підсумкову порогову величину Y(n). Суматор 564 підсумовує значення показників для всіх Τ антен, забезпечуючи підсумкове значення показника Е(n), яке потім порівнюється з підсумковою пороговою величиною Υ(n) за допомогою компаратора 570. Вихідний сигнал детектора вкаже, що якщо Ε(n)>Υ(n), то МДП КАН1 був прийнятий, а в іншому випадку КАН1 МДП не був прийнятий. 86752 14 Фіг.6 зображає блок-схему кореляційного детектора 440b, який є одним варіантом здійснення детектора 440а, представленого на Фіг.5. Вибірками xi(n) для кожної приймальної антени забезпечується накопичувальний суматор 520 символів, який реалізується на базі Р-1 елементів 522 затримки і Р-1 суматорів 524. Кожний елемент 522 затримки забезпечує один символ ОЧРК (тобто Μ вибірок) затримки. Р-1 суматорів 524 виконують накопичення Ρ символів пілот-сигналу ОЧРК на основі вибірок, і останній суматор забезпечує ~ (n) вибірок для накопичених символів пілотxi сигналу ОЧРК. Вибірки ~i (n) можуть бути виражеx ні таким чином: p -1 ~ (n) = xi (1) å x1(n - jM), де i Î {1...T} j= 0 Вибірками ~i (n) забезпечується лінія/буфер x 530 затримки, які реалізуються на базі Ν-1 елементів 532 затримки, кожний з яких забезпечує один період вибірки затримки. Детектор 540 сигналу виконує кореляцію накопиченого символу пілотсигналу ОЧРК з відомим символом пілот-сигналу ОЧРК і визначає значення показника Еin) для накопиченого символу пілот-сигналу ОЧРК. Кожною з N вибірок для накопиченого символу пілот-сигналу ОЧРК, забезпечується відповідний помножувач 542, який також приймає відповідну спряжену вибірку пілот-сигналу ~1 ( j), де j Î {0…N-1}. Для одеp* ржання { ~1 ( j) }, набір символів пілот-сигналу p* {р1(k)} для піддіапазонів пілот-сигналу і нульові значення сигналів для невикористаних піддіапазонів (наприклад, як показано в таблиці 1), перетворюються у часову область, використовуючи Nточковий ЗШПФ, одержуючи N вибірок пілот~ сигналу, p1(0) через ~1(N - 1) , які після цього споp лучаються і поставляються N помножувачам 542. Кожний помножувач 542 перемножує цю вибірку ~ (n - j) зі спряженою їй вибіркою пілот-сигналу xi ~ * ( j), і поставляє результат на суматор 544. Суp1 матор 544 підсумовує результати від всіх N помножувачів 542 і надає підсумований результат блока 546. Блок 546 визначає квадрат величини підсумованого результату, який надається як значення показника Еi(n). Значення показника для кожної антени може бути виражене таким чином: Ei(n) = N -1 å 2 ~* ( j) × ~ (n - j) , де i Î {1…T} xi p1 (2) j= 0 Суматор 564 приймає і підсумовує значення показників для всіх Τ антен, щоб забезпечити підсумкове значення показника Е(n), яке може бути виражене таким чином: E(n) = T å E1(n) i =1 (3) Блок обчислення 550 порога визначає адаптивний поріг для використання при виявленні МДП 15 86752 КАН1 для поточної гіпотези. Кожна з N вибірок для накопиченого символу пілот-сигналу ОЧРК надається відповідному блоку 552, який визначає квадрат величини вибірки. Після цього суматор 554 підсумовує квадрати величин від всіх N блоків 552 для забезпечення порогової величини Υi(n). Суматор 560 приймає і підсумовує порогові величини для всіх Τ антен, щоб забезпечити сукупну порогову величину Ytot(n), яка може бути виражена в наступному вигляді: 2 T N -1 ~ (n - j ) Ytot (n) = å å x i i =1 j = 0 16 Після цього помножувач 562 масштабує сукупну порогову величину з масштабним коефіцієнтом S1 забезпечуючи підсумкову порогову величину, яка може бути задана у вигляді Y(n)=S1 ×·Ytot(n). Компаратор 570 порівнює підсумкове значення показника Е(n) з підсумковою пороговою величиною Υ(n) і забезпечує вихідний сигнал детектора D(n), який може бути виражений в наступному вигляді: (4) ì" PDU _ CH1 _ присутній" _ якщо _ E(n)ñ Y(n),ü ï ï D(n) = í" PDU _ CH1 _ не _ присутній" _ ý (5) ïу _ протилежному _ випадку ï î þ Якщо МДП КАН1 виявлений, то синхронізація символу ОЧРК встановлюється по моменту виявлення МДП КАН1 (тобто в конкретне значення n, при якому МДП КАН1 був виявлений). Масштабний коефіцієнт S1 є позитивною константою, вибраною для забезпечення: (1) певної імовірності пропущеного виявлення, яка являє собою імовірність не виявлення МДП КАН1, який передавався, і (2) певної імовірності помилкових тривог, яка являє собою імовірність помилкової вказівки на те, що МДП КАН1 був прийнятий при тому, що фактично він не передавався. Бажано, щоб імовірність пропущеного виявлення була меншою, ніж коефіцієнт помилок повідомлення (MER) так, щоб MER був зумовлений прийнятим відношенням сигнал - шум (ВСШ) і іншими параметрами, а не детектором. MER може бути визначений для каналу 1, наприклад, величиною в 1 відсоток або менше. Вихідний сигнал детектора може використовуватися для визначення того, чи дійсно прийнятий МДП КАН1 був оброблений для того, щоб відновити передане повідомлення КАН1. Визначення того, чи декодоване повідомлення КАН1 правильно або з помилкою, може здійснюватися на основі значення CRC, що міститься в повідомленні. Для даного одержаного МДП КАН1, це може стати можливим для кореляційного детектора, що оголошує множину виявлень. Це так тому, що виявлення може бути оголошене шумом в одному або більшій кількості символів ОЧРК і в сигналі в інших символах ОЧРК для МДП КАН1, що виявляється. Наприклад, при Р=2, перше виявлення може статися з шумом в першому символі ОЧРК і з сигналом у другому символі ОЧРК, і друге виявлення з великим підсумковим значенням показника станеться, коли другий сигнальний символ ОЧРК пізніше досягне одного періоду символу ОЧРК. Таким чином, при Р>1, детектором можна керувати, продовжуючи виявлення для МДП КАН1 додаткових Р-1 періодів символів ОЧРК, відшукуючи для МДП найбільший підсумковий показник значення. Після цього синхронізація символу ОЧРК встановлюється виявленням найбільшого підсумкового показника значення, а також обчис люються RTD, на основі часу, зв'язаного з цим виявленням. Обробка виявлення може виконуватися незалежно від обробки повідомлення, тобто обробка виявлення може продовжуватися нормальним чином незалежно від того, чи дійсно виявлені МДП КАН1. Таким чином, якщо МДП КАН1 спочатку виявлений в n-j періодах вибірок з підсумковим значенням показника E(n-j), і пізніше виявляється інший МДП КАН1 в n періодах вибірок з підсумковим значенням показника Е(n), де E(n)>E(n-j) і j менше розміру вікна виявлення, тоді поточна обробка повідомлення для МДП КАН1, виявленого в n-j періодах вибірок, може бути припинена, і МДП КАН1, виявлений в n періоді вибірки, може бути оброблений замість цього. Фіг.11В зображає обробку прийнятих даних для каналу 2, які містять часову компенсацію. Звернувшись назад до Фіг.10В, побачимо, що блоки передавача здійснюють передачу в певних інтервалах КАН2 та передачі КАН2 містять часову компенсацію, досягаючи блока приймача у вибраних межах інтервалу КАН2. У цьому випадку, звернувшись назад до Фіг.11В, побачимо, що блок приймача може виявити передачі КАН2 в кожному інтервалі КАН2 (замість кожного періоду вибірки), і вікно виявлення може переміщатися від інтервалу до інтервалу. Для кожного інтервалу КАН2, який відповідає гіпотезі, детектор з керування за рішенням обробляє вибірки, прийняті в межах вікна виявлення, визначаючи показник гіпотетичного МДП КАН2, прийнятого в цьому інтервалі. Якщо показник перевищує поріг КАН2, то МДП КАН2 вважається прийнятим. Фіг.7 зображає блок-схему варіанту здійснення демодулятора/детектора 420с даних, який також може використовуватися для блока 420 з Фіг.4. Демодулятор/детектор 420с даних включає в себе демодулятор 430с даних, що використовується для виконання когерентної демодуляції, і детектор 440с з керування за рішенням, що використовується для виявлення МДП КАН2. Вибірки для кожної з Τ приймальних антен надаються відповідному антенному демодулятору 710, що знаходиться в межах демодулятора 430с даних, і відповідному 17 86752 детектору 750 з керування за рішенням, що знаходиться в межах детектора 440с. Кожний антенний демодулятор 710 одночасно виконує когерентну демодуляцію одного прийнятого символу ОЧРК для однієї антени. Для кожного прийнятого символу ОЧРК, блок 712 швидкого перетворення Фур'є (ШПФ, FFT) приймає вибірки xi(n) для символу ОЧРК, видаляє циклічний префікс, одержуючи перетворений символ, і виконує швидке перетворення Фур'є (ШПФ) перетвореного символу, забезпечуючи N прийнятих символів ri(k), які включають в себе прийняті символи даних ri,d(k) і прийняті символи пілот-сигналу ri,p(k). Після цього, блок оцінки каналу 720 оцінює відповідь каналу піддіапазонів даних на основі прийнятих символів пілот-сигналу ri,p(k). Демодулятор 730 виконує когерентну демодуляцію прийнятих символів даних rj,d(k) з оцінками каналу для забезпечення відновлених символів даних s^j(k). Накопичувальний суматор 740 символів приймає і накопичує відновлені символи даних від демодуляторів 710a-710t для Τ приймальних антен і забезпечує відновлені символи s^(k). Після цього процесор 450 RX даних обробляє відновлені символи s^(k), як описано вище стосовно Фіг.4, забезпечуючи декодовані дані. У варіанті здійснення, повідомлення КАН2 не включає в себе CRC, і перевірка CRC не виконується процесором RX даних. Потім процесор 310 ТХ даних обробляє декодовані дані, забезпечуючи повторно модульовані символи с(k), які являють собою оцінки переданих символів даних s(k). Обробка процесором 310 включає в себе кодування, перемежування і перетворення символів, як описано вище стосовно Фіг.3А. Обробка процесором 450 RX даних часто називається просто "декодування", а обробка процесором 310 ТХ даних часто називається "повторним кодуванням". Кожний детектор 750 з керування за рішенням одночасно виконує виявлення для одного прийнятого символу ОЧРК. Для кожного прийнятого символу ОЧРК, блок 752 ШПФ приймає вибірки xi(n) для символів ОЧРК і виконує ШПФ над відповідним перетвореним символом для забезпечення N прийнятих символів ri(k). Блоки 712 ШПФ та 752 звичайно реалізовуються одним блоком ШПФ, але для розуміння зображуються як два блоки на Фіг.7. Потім детектор 760 сигналу обробляє прийняті символи пілот-сигналу і символи даних з їх очікуваними символами для забезпечення показника 18 Е'i(n) для символів ОЧРК, що обробляються. Блок 770 обчислення адаптивного порога визначає величину адаптивного порога Yi'(n), що використовується для визначення того, чи дійсно МДП КАН2 був прийнятий. Суматор 780 підсумовує порогові величини для всіх Τ антен, забезпечуючи сукупну порогову величину Ytot'(n), яка додатково масштабується з масштабним коефіцієнтом S2 за допомогою помножувача 782 для того, щоб одержати підсумкову порогову величину Y'(n). Суматор 784 підсумовує значення показників для всіх Τ антен, забезпечуючи підсумкове значення показника Е'(n), яке потім порівнюється з підсумковою пороговою величиною Υ'(n) за допомогою компаратора 790. Вихідний сигнал детектора вкаже, що якщо Ε'(n)>Υ'(n), то МДП КАН2 був прийнятий, а в іншому випадку КАН2 МДП не був прийнятий. Фіг.8А зображає блок-схему демодулятора даних 430d, який являє собою один варіант здійснення демодулятора даних 430с, представленого на Фіг.7. Вибірки хі(n) для кожної приймальної антени перетворюються блоком 712 ШПФ для забезпечення N прийнятих символів ri(k) для кожного перетвореного символу. Для варіанту здійснення, показаного в таблиці 1, N прийнятих символів включають в себе 28 прийнятих символів пілотсигналу для 28 піддіапазонів пілот-сигналу, 24 прийнятих символів даних для 24 піддіапазонів даних, і 12 додаткових символів для 12 невикористаних піддіапазонів. Для простоти, наступний опис призначений для варіанту здійснення, показаного на Фіг.2В, відповідно до якого N прийнятих символів включають в себе L+1 прийнятих символів пілот-сигналу для L+1 піддіапазонів пілот-сигналу і L прийнятих символів даних для L піддіапазонівданих, причому кожний піддіапазон даних обрамовується з обох сторін піддіапазонами пілот-сигналу, і індекс k піддіапазону для піддіапазонів пілотсигналу і піддіпазонів даних визначається як k Îє К, де К={1... 49}. Когерентна демодуляція кожного з L піддіапазонів даних виконується першим формуванням оцінки відповіді каналу для піддіапазонів даних, використовуючи два піддіапазони пілот-сигналу, що обрамовують піддіапазон даних. Оцінка каналу h^i(k) для k-ого піддіапазону даних може бути прийнята при складанні оцінок каналу для двох обрамовуючих піддіапазонів пілот-сигналу, яка може бути виражена таким чином: ˆ ˆ ˆ h1(k ) = h1(k - 1) + h1(k + 1) = (6) = p * (k - 1)ri (k - 1) + p * (k + 1)ri (k + 1), де k Î K d і Î {1...T } 2 2 де р2(k) являє собою символ пілот-сигналу, що передається в k-ому піддіапазоні для каналу 2 і Kd представляє набір піддіапазонів даних, тобто Kd Î {2,4,...2L}. Відновлені символи даних s^i(k) для кожного піддіапазону даних в такому випадку можуть бути виражені в наступному вигляді: ˆ ˆ s i (k ) = hi* (k ) × ri (k ), де k Î K d і Î {1...T} (7) Відновлені символи даних для всіх Τ приймальних антен для кожного піддіапазону даних в такому випадку можуть бути знайдені у вигляді: ˆ s(k ) = T ˆ å si (k ), де k Î K d i =1 (8) На Фіг.8А, оцінка каналу, показана в рівнянні (6), виконується L+1 помножувачем 722 і L суматорами 724. Кожний помножувач 722 перемножує 19 прийнятий символ для відповідного піддіапазону пілот-сигналу із спряженим відомим символом пілот-сигналу для цього піддіапазону, щоб забезпечити оцінку каналу для піддіапазону пілотсигналу. У такому випадку кожний суматор 724 підсумовує оцінки каналу для двох піддіапазонів пілот-сигналу, що обрамовують відповідний піддіапазон даних, щоб забезпечити оцінку каналу для цього піддіапазону даних. Оцінки каналу для L піддіапазонів даних також можуть бути одержані на основі інтерполяції або деяких інших способів, без виходу за рамки обсягу винаходу. Когерентна демодуляція, показана в рівнянні (7), виконується L помножувачами 732. Кожний помножувач 732 перемножує прийнятий символ ri(κ) для відповідного піддіапазону даних із спряˆ женою оцінкою каналу h i* (k ) для цього піддіапазону, щоб забезпечити відновлений символ даних ˆ si (k ) для піддіапазону даних. Типове накопичення для всіх Τ приймальних антен, як показано в рівнянні (8), виконується L суматорами 742. Кожний суматор 742 приймає і підсумовує Τ відновлених символів даних s (k) для Τ приймальних антен для зв'язаного піддіапазону даних, щоб забезпечити ˆ відновлений символ s(k ) для цього піддіапазону. Як зазначено вище, мультиплексування піддіапазону може бути таким, що кожна група з Q піддіапазонів даних обрамовується з обох сторін піддіапазонами пілот-сигналу, де Q може бути більше одиниці. Якщо Q>1, то когерентна демодуляція може виконуватися декількома способами. В одному варіанті здійснення, прийнятий символ пілотсигналу для кожного піддіапазону пілот-сигналу використовується як когерентне посилання для двох суміжних піддіапазонів даних, і прийняті символи даних для цих піддіапазонів даних можуть когерентно демодулюватися на основі цього прийнятого символу пілот-сигналу. У такому випадку, для видалення модуляції з щойно виявлених символів даних, можуть прийматися і використовуватися тверді рішення для того, щоб одержати поліпшені оцінки каналу для наступних двох піддіапазонів даних. Процес демодуляції може починатися з кінцевих піддіапазонів даних (тобто поруч з піддіапазонами пілот-сигналу) і виконуватися в напрямку середнього піддіапазону даних. Поліпшені оцінки каналу для піддіапазонів даних, ще більш далеких від піддіапазонів пілот-сигналу, можуть бути одержані, оскільки виявляється кожна пара прийнятих символів даних. В іншому варіанті здійснення, прийняті символи пілот-сигналу для кожної пари піддіапазонів пілот-сигналу, зазнають інтерполяції для того, щоб одержати оцінку каналу для кожного з Q піддіапазонів даних, що обрамовують ці піддіапазони пілот-сигналу. Значення CRC часто використовують для визначення того, чи було прийняте повідомлення декодоване правильно або з помилками. У певних випадках, може бути потрібно включити значення CRC в повідомлення через службовий сигнал, зв'язаний зі значенням CRC і/або з деяких інших міркувань. У цьому випадку необхідний інший механізм для визначення того, чи дійсно прийняте 86752 20 повідомлення достовірне. Для варіанту здійснення, показаного на Фіг.7, демодулятором 430с даних і процесором 450 RX даних можна керувати для того, щоб надати декодоване повідомлення для кожної гіпотези, а детектором 440с можна керувати для того, щоб надати вказівку того, чи дійсно повідомлення було прийняте для гіпотези. Фіг.8В зображає блок-схему детектора 440d з керування за рішенням, який виконує диференціальне виявлення в частотній області і являє собою один варіант здійснення детектора 440с, представленого на Фіг.7. Вибірки xi(n) для кожної приймальної антени перетворюються блоком 752 ШПФ для того, щоб забезпечити N прийнятих символів ri(k) для кожного перетвореного символу. Для визначення значення показника Е'(n) для кожного перетвореного символу, спочатку для кожної приймальної антени одержують статистику виявлення gi(n) за допомогою підсумовування по дійсній частині 2L скалярних добутків, сформованих при використанні суміжних пар піддіапазонів пілот-сигналу та піддіапазонів даних. Статистика виявлення gi(n) може бути виражена в наступному вигляді: gi (n) = де 2L å z(k ) × z * (k + 1), де i Î {1...T} (9a) k =1 ìr (k ) × p * (k ) при k Î {13,... 2L + 1} , ïi 2 z i (k ) = í ïri (k ) × c * (k ) при k Î {2,4,... 2L + 1} î (9b) Показник значення Е'(n) для перетвореного символу в такому випадку може бути виражений в наступному вигляді: E¢(n) = T 2 å Re{ gi (¢n)} , де i Î {1...T} (10a) i =1 В альтернативному варіанті, показник значення Е'(n) може бути виражений в наступному вигляді: E¢(n) = T å Re{gi (n)} 2 , де i Î {1...T } (10b) i =1 На Фіг.8В обчислення статистики виявлення gi(n), показане в рівнянні (9), виконується 2L+1 помножувачами 762, 2L помножувачами 764, і суматором 766. Кожний помножувач 762 перемножує прийнятий символ для відповідного піддіапазону пілот-сигналу або піддіапазону даних із спряженим відомим символом пілот-сигналу або повторно модульованим символом для цього піддіапазону. Кожний помножувач 764 виконує скалярний добуток вихідних сигналів від пари помножувачів 762 для пари суміжних піддіапазону пілот-сигналу і піддіапазону даних. Потім суматор 766 підсумовує вихідні сигнали від L помножувачів 764, щоб надати статистику виявлення gj(n). (Для варіанту здійснення, показаного в рівнянні (10а), блок 768 приймає gj(n), і надає дійсну частину суматора 784, який підсумовує дійсні частини gi(n) для всіх Τ антен. Потім вихідний сигнал з суматора 784 зво 21 86752 диться в квадрат блоком 786, щоб надати показник значення Е'(n). Для варіанту здійснення, показаного в рівнянні (10b), блок 786 може бути вміщений між блоком 768 та суматором 784. Блок обчислення 770 адаптивного порога визначає адаптивний поріг Y'(n), щоб використати його для кожного прийнятого перетвореного символу. Кожний з 2L+1 прийнятих символів ri(k) для піддіапазону пілот-сигналу і піддіапазону даних надається відповідному блоку 772, який визначає квадрат величини символу. Потім суматор 774 підсумовує квадрати величин від всіх 2L+1 блоків 772 для того, щоб забезпечити порогові величини Y'(n). Суматор 780 приймає і підсумовує порогові величини для всіх Τ антен, забезпечуючи сукупну порогову величину Y'tot(n), яка може бути виражена в наступному вигляді: ` Ytot (n) = 2 T 2L +1 ri (k ) å å i =1 k =1 22 Помножувач 782 масштабує сукупну порогову величину з масштабним коефіцієнтом S2a, забезпечуючи підсумкову порогову величину, яка може бути задана у вигляді Y'(n)=S2a×Y'tot(n). Взагалі, і порогове значення Y'(n), і значення показника Е'(n), накопичуються по тривалості виявленого МДП. Таким чином, якщо МДП охоплює множину періодів символу ОЧРК, то порогові величини і значення показників спершу обчислюються як описано вище для кожного з цих символів ОЧРК і потім накопичуються, забезпечуючи підсумкові порогові величини і значення показників для МДП. Компаратор 790 порівнює підсумкове значення показника Е'(n) з підсумковою пороговою величиною Υ'(n) і забезпечує вихідний сигнал детектора D'(n), який може бути виражений в наступному вигляді: (11) ì" PDU _ CH2 _ присутній " _ якщо _ E¢(n)ñ Y¢(n),ü ï ï D¢(n) = í" PDU _ CH2 _ не _ присутній " _ ý (12) ï ïу _ протилежно му _ випадку þ î Якщо вихідний сигнал детектора D'(n) вказує, що МДП КАН2 присутній, то повідомлення КАН2, декодоване процесором RX даних, вважають достовірним, і воно по обстановці може бути додатково оброблене контролером. В іншому випадку, повідомлення КАН2 відкидається. Фіг.8С зображає блок-схему детектора 440е з керування за рішенням, який виконує диференціальне виявлення в частотній області і являє собою один варіант здійснення детектора 440с, представленого на Фіг.7. Вибірками хi(n) забезпечується лінія/буфер 830 затримки, які реалізуються на базі N-1 елементів 832 затримки, кожний з яких забезпечує один період вибірки затримки. Детектор 440е виконує кореляцію кожного прийнятого символу ОЧРК з відповідним йому "відновленим" символом ОЧРК, визначаючи показник Е"(n) для прийнятого символу ОЧРК. Кожна з N вибірок xi(n) для прийнятого символу ОЧРК, надається відповідному помножувачу 842, який також приймає відповідну спряжену відновлену вибірку d*(j), де j Î {0... N-1}. Для отримання d*(j), символи пілот-сигналу р2(k) для піддіапазонів пілот-сигналу (наприклад, як показано в таблиці 1), повторно модульовані символи с(k) для піддіапазонів даних, і нульові значення сигналів для невикористаних піддіапазонів (тобто N символів для N повних піддіапазонів) для періоду символу ОЧРК, перетворюються у часову область N-точковим ЗШПФ 830, одержуючи N відновлених вибірок, від d(0) до d(N-1), які потім сполучаються і надаються N помножувачам 842. Операції, що виконуються іншими елементами, представленими на Фіг.8С, подібні описаним вище стосовно Фіг.6. Значення показника Ei"(n) для кожної антени може бути виражене таким чином: Ei²(n) = N =1 å 2 * ( j) × x (n - j) , де i Î {1…T} d i (13) j=0 Підсумкове значення показника Ei"(n) для всіх Τ антен в такому випадку може бути виражене таким чином: E ¢¢(n) = T å E¢¢¢ i (n), (14) i =1 Поріг Υ"(n), що використовується для порівняння з підсумковим значенням показника Е"(n), може бути визначений подібно тому, як описано вище стосовно Фіг.6. Зокрема, сукупну порогову величину Y"tot(n) для всіх Τ антен, яка може бути виражена в наступному вигляді: Y ¢¢ tot (n) = 2 T N -1 x i (n - j) å å i =1 j = 0 (15) Підсумкове порогове значення в такому випадку може задаватися в наступному вигляді: Υ"(n) = S2b×Y"tot(n). Для детектора з керування за рішенням, масштабний коефіцієнт S2 (який являє собою коефіцієнт S2a для детектора 440d, представленого на Фіг.8В, і коефіцієнт S2b для детектора 440е, представленого на Фіг.8С) є позитивною константою, вибраною для забезпечення: (1) певної імовірності пропущеного виявлення МДП КАН2, і (2) певної імовірності помилкових тривог для неправильно оголошеної наявності МДП КАН2. Якщо повідомлення КАН2 визначаються так, що вони не включають в себе значення CRC, то визначаючи, чи дійсно присутні повідомлення КАН2, покладаються виключно на детектор. Помилкові повідомлення 23 КАН2 можуть бути надані контролеру з наступних причин: - помилкова тривога - шум в прийнятому сигналі помилково запускає виявлення; і - неправильне декодування - сигнал правильно запускає виявлення, але декодоване повідомлення КАН2 включає в себе невиправлені та невиявлені помилки. Якщо канал 2 використовується як канал з довільним доступом, то сигнал помилкової тривоги для МДП КАН2 може примусити систему виділити ресурси неіснуючому терміналу користувача, що в такому випадку призводить до пустої витрати ресурсів. У цьому випадку бажано вибирати масштабний коефіцієнт S2 таким чином, щоб звести до мінімуму імовірність сигналу помилкової тривоги, оскільки небажано мати шум, що часто запускає пусту витрату ресурсів. Імовірність неправильного декодування, відноситься до імовірності виявлення, і більш висока імовірність виявлення може служити причиною збільшення випадків неправильного декодування. Коли трапляється випадок неправильного декодування, помилково декодоване повідомлення КАН2 надається контролеру. Контролер може бути здатний перевіряти достовірність повідомлення КАН2 деякими іншими способами. Наприклад, якщо повідомлення КАН2 включає в себе унікальний ідентифікатор для термінала користувача, що передав повідомлення, то контролер може візуально перевірити, чи включений унікальний ідентифікатор для відновленого повідомлення КАН2 в список дійсних ідентифікаторів. Якщо унікальний ідентифікатор в прийнятому повідомленні КАН2 визначений як дійсний, то система може виділити ресурси терміналу користувача, зв'язаному з цим ідентифікатором. При виборі масштабного коефіцієнта S2, може бути потрібним виявити настільки багато дійсних повідомлень КАН2, наскільки можливо при підтримці імовірностей подачі помилкової тривоги і неправильного декодування нижче певного рівня. Також можна змінювати масштабний коефіцієнт S2 на основі завантаження системи. Наприклад, якщо завантаження системи низьке, і існує невелика кількість дійсних ідентифікаторів, то імовірність помилкового виділення ресурсів системи представляється невеликою. У цьому випадку може використовуватися більш низький поріг виявлення. При збільшенні завантаження системи, для зменшення випадків неправильного декодування, поріг виявлення може бути збільшений. Фіг.9 зображає блок-схему варіанту здійснення точки доступу 110х і термінала користувача 120х в системі 100. Для цього варіанту здійснення, як точка доступу 110х, так і термінал користувача 120х обладнуються множиною антен. Взагалі, як точка доступу, так і термінал користувача можуть бути обладнані будь-якою кількістю передавальних/приймальних антен. У терміналі користувача 120х, процесор 310 ТХ даних по висхідній лінії зв'язку приймає і обробляє трафік даних від джерела 308 даних, а також інші дані (наприклад, для повідомлень КАН1 та КАН2) від контролера 360, забезпечуючи мульти 86752 24 плексування символів даних і символів пілотсигналу, як описано вище стосовно Фіг.3А. ТХ просторовий процесор 320 може виконувати просторову обробку символів пілот-сигналу і символів даних, забезпечуючи потік символів, що передаються для кожної антени. Кожний модулятор 340 приймає та обробляє відповідний потік символів, що передаються, забезпечуючи відповідний модульований сигнал висхідної лінії зв'язку, який потім передається від відповідної антени 350. У точці доступу 110x, Τ антен (від 408а до 408t) приймають передані модульовані сигнали висхідної лінії зв'язку від термінала користувача, і кожна антена доставляє прийнятий сигнал на відповідний приймач 410. Кожний приймач 410 адаптує прийнятий сигнал і додатково відцифровує адаптований сигнал, забезпечуючи вибірки. Потім, як описано вище, демодулятор/детектор 420 даних виконує обробку, виявляючи повідомлення КАН1 та КАН2. Процесор 450 RX даних, обробляє відновлені символи, забезпечуючи потік декодованих даних (який може бути наданний приймачу 452 даних для зберігання) і відновлені повідомлення КАН1 та КАН2 (які можуть бути надані контролеру 460 для додаткової обробки). Обробка для низхідної лінії зв'язку може бути такою самою, або відмінною від обробки для висхідної лінії зв'язку. Дані від джерела 468 даних і службові сигнали (наприклад, повідомлення у відповідь) від контролера 460 обробляються (наприклад, кодуються, переміжуються і модулюються) процесором 470 ТХ даних, і можуть бути просторово оброблені ТХ просторовим процесором 480. Потім, передані від ТХ просторового процесора 480 символи обробляються модуляторами 410a410t, щоб згенерувати Τ модульованих сигналів низхідної лінії зв'язку, які передаються через антени 408a-408t. У терміналі користувача 120х, модульовані сигнали низхідної лінії зв'язку приймаються антенами 350, пристосовуються та відцифровуються приймачами 340 та обробляються RX просторовим процесором 370 і процесором 380 RX даних способом, компліментарним по відношенню до виконаного в точці доступу. Декодовані дані для низхідної лінії зв'язку можуть бути надані приймачу 382 даних для зберігання і/або контролеру 360 для подальшої обробки. Контролери 360 та 460 керують функціонуванням різних блоків обробки в терміналі користувача і точці доступу, відповідно. Блоки пам'яті 362 та 462 зберігають дані і програмні коди, що використовуються контролерами 360 та 460, відповідно. Для розуміння, визначені варіанти здійснення кореляції та детекторів з керування за рішенням, демодуляторів та блоків приймача, були описані для певних форматів МДП. Також без виходу за рамки винаходу можливі різні інші варіанти здійснення і використання цих детекторів. Наприклад, кореляційний детектор може використовуватися для каналу, відповідно до чого передачі містять часову компенсацію, а детектор з керування за рішенням може використовуватися для каналу, відповідно до чого передачі не містять часової компенсації. 25 Детектор з керування за рішенням може бути здійснений в частотній області (як показано на Фіг.8В) або у часовій області (як показано на Фіг.8С). Крім того, детектор з керування за рішенням може використовуватися для різних форматів МДП. Наприклад, детектор з керування за рішенням може використовуватися для формату МДП, відповідно до якого дані і пілот-сигнал є мультиплексованими по піддіапазону (як описано вище для КАН2 МДП), формату МДП, відповідно до якого дані і пілот-сигнал містять часове розділення сигналів (TDM) (як описано вище для КАН1 МДП), та інш. Детектор з керування за рішенням також може використовуватися як з пілот-сигналом, так і без нього. Взагалі, детектор з керування за рішенням використовує прийняті символи даних частотної області або відновлені вибірки даних часової області для виявлення передач даних в прийнятому сигналі. Цей детектор переважно може використовуватися для виявлення помилок повідомлення, коли CRC або інші механізми виявлення помилок не доступні. Використання адаптивного порога може забезпечити стійкі параметри виявлення в багатьох сценаріях функціонування, таких як не ліцензований діапазон частот, в якому можуть бути присутніми різні джерела перешкод. Поріг може бути встановлений на основі приватної статистики для виявлених передач. Ця статистика може стосуватися енергії корисного сигналу, шуму і перешкод в передачі, або деякихінших параметрів. Детектори, демодулятори та приймачі, описані тут, можуть використовуватися для різних типів каналів передачі даних. Наприклад, ці блоки можуть використовуватися для різних типів каналів з довільним доступом, таких як ті, що детально описані у вищезазначених заявці на патент US №60/432,440 та попередній заявці на патент US №60/421,309. Детектори, демодулятори та приймачі, описані тут, також можуть використовуватися для різних безпровідних систем зв'язку з колективним доступом. Одна така система є системою безпровідного зв'язку з колективним доступом з багатьма входами та багатьма виходами (ΜΙΜΟ), описаною у вищезазначеній попередній заявці на патент US №60/421,309. Взагалі, ці системи можуть викорис 86752 26 товувати або не використовувати ОЧРК, або можуть використовувати яку б то не було іншу схему модуляції з багатьма несучими, замість ОЧРК, і можуть використовувати або не використовувати ΜΙΜΟ. Детектори, демодулятори та приймачі, описані тут, можуть бути здійснені за допомогою різних засобів. Наприклад, ці блоки можуть бути здійснені апаратними, програмними засобами або їх комбінацією. Для апаратного виконання детектори та приймачі можуть бути здійснені в межах однієї або більшої кількості спеціалізованих інтегральних мікросхем (ASIC), цифрового сигнального процесора (DSP), цифрового пристрою обробки сигналів (DSPD), програмованого логічного пристрою (PLD), програмованої користувачем вентильної матриці (FPGA), процесора, контролера, мікроконтролера, мікропроцесора, іншого електронного блока, призначеного для виконання описаних тут функцій, або комбінації вищепереліченого. Для випадку програмного виконання, обробка сигналів для детекторів, демодуляторів та приймачів може бути здійснена модулями (наприклад, процедурами, функціями тощо), які виконують описані тут функції. Програмні коди можуть зберігатися в блоці пам'яті (наприклад, блоки пам'яті 362 та 462, представлені на Фіг.9) і виконуватися процесором (наприклад, контролерами 360 та 460). Блок пам’яті може бути здійснений в процесорі або бути зовнішнім по відношенню до процесора, в цьому випадку він може бути приєднаний з можливістю обміну інформацією до процесора через різні засоби, відомі з рівня техніки. Попередній опис розкритих варіантів здійснення зроблений для надання будь-якій людині, що є фахівцем у даній галузі техніки, можливості здійснення або використання даного винаходу. Різні модифікації до цих варіантів здійснення будуть очевидні фахівцям в даній галузі техніки, і визначені тут родові принципи можуть бути застосовані до інших варіантів здійснення, без відступу від суті або обсягу винаходу. Таким чином, даний винахід не призначений для того, щоб служити обмеженням для показаних тут варіантів здійснення, але повинен відповідати самому широкому обсягу, сумісному з розкритими тут принципами та новими ознаками. 27 86752 28 29 86752 30 31 86752 32 33 86752 34 35 86752 36 37 86752 38 39 Комп’ютерна верстка Л.Литвиненко 86752 Підписне 40 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDetecting and demodulating data transmissions in wireless communication systems
Автори англійськоюWalton J. Rodney, Wallace Mark S.
Назва патенту російськоюВыявление и демодуляция данных в системах беспроводной связи
Автори російськоюУолтон Дж. Родни, Уоллейс Марк С.
МПК / Мітки
МПК: H04L 1/02, H04L 27/26
Мітки: демодуляція, даних, виявлення, безпровідного, систем, зв'язку
Код посилання
<a href="https://ua.patents.su/20-86752-viyavlennya-ta-demodulyaciya-danikh-dlya-sistem-bezprovidnogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Виявлення та демодуляція даних для систем безпровідного зв’язку</a>
Спосіб одночасної передачі сукупності типів даних та спосіб прийому передачі, мультиплексованої з розділенням часу у системі безпровідного звязку, а також передавальний та приймальний вузли такої системи
Номер патенту: 74396
Опубліковано: 15.12.2005
Автори: Вілленеґґер Серж, Ландбі Стайн А.
МПК: H04L 27/00, H04J 4/00, H04J 13/00, H04B 7/26
Мітки: передачі, типів, одночасної, передавальний, спосіб, мультиплексованої, такої, розділенням, приймальний, також, сукупності, прийому, зв'язку, безпровідного, вузлі, даних, системі, часу
Формула / Реферат:
1. Спосіб одночасної передачі сукупності типів даних у системі безпровідного зв'язку, який включає:- прийом і обробку першого типу даних згідно з першою схемою обробки сигналу для генерування першого корисного навантаження,- прийом і обробку другого типу даних згідно з другою схемою обробки сигналу для генерування другого корисного навантаження,- визначення у інтервалі передачі першої частини, призначеної для передачі...
Спосіб і пристрій (варіанти) для визначення швидкості передачі даних у системі безпровідного зв’язку з швидкісною передачею пакетів даних
Номер патенту: 74213
Опубліковано: 15.11.2005
Автори: Разумов Леонід, Вей Йонбін, Ландбі Стайн А., Бао Ґанґ
МПК: H04Q 7/00
Мітки: пристрій, системі, зв'язку, варіанти, даних, передачею, спосіб, безпровідного, швидкісною, передачі, пакетів, швидкості, визначення
Формула / Реферат:
1. Пристрій безпровідного зв'язку, який включає:- перший процесор, призначений оперативно приймати перший показник, що відповідає наявній потужності передачі пакетних даних; і- кореляційний вузол, призначений оперативно визначати показник швидкості передачі пакетних даних як функцію першого показника і сили прийнятого пілот-сигналу.2. Пристрій за п. 1, який відрізняється тим, що перший показник відповідає відношенню...
Спосіб підтримки передачі пакетних даних і передачі даних з низькою затримкою через множину каналів у системі безпровідного зв’язку, а також пристрій прийому пакетних даних через щонайменше один канал першого н
Номер патенту: 75612
Опубліковано: 15.05.2006
Автори: Бао Ґанґ, Ландбі Стайн А., Разумов Леонід
МПК: H04L 12/56, H04Q 7/38
Мітки: каналів, пакетних, системі, множину, зв'язку, низькою, пристрій, даних, спосіб, щонайменше, прийому, також, затримкою, передачі, безпровідного, підтримки, першого, канал
Формула / Реферат:
1. Спосіб підтримки передачі пакетних даних і передачі даних з низькою затримкою через множину каналів передачі у системі безпровідного зв'язку, який включає:- передачу пакетних даних через набір каналів пакетних даних, - передачу керуючої інформації, пов'язаної з цими пакетними даними через канал сигналізації, причому канал сигналізації відокремлений від набору каналів передачі пакетних даних, і керуюча інформація ідентифікує...
Спосіб і пристрй (варіанти) для передачі даних трафіку у каналі безпровідного зв’язку
Номер патенту: 76730
Опубліковано: 15.09.2006
Автори: Голтсмен Джек М., Саркар Сандіп, Сайфуддін Ахмед
МПК: H04L 1/00
Мітки: даних, безпровідного, зв'язку, спосіб, пристрй, трафіку, передачі, каналі, варіанти
Формула / Реферат:
1. Спосіб передачі даних у каналі системи безпровідного зв'язку, який включає:- пакетування корисної складової даних у сукупність субпакетів,- послідовну передачу першої частини сукупності субпакетів згідно із зумовленими затримками і- послідовну передачу другої частини сукупності субпакетів на піку обвідної релеєвського затухання, причому пік визначається через порогове значення.2. Спосіб за п. 1, в якому кожний...
Спосіб планування передачі даних по лінії космос-земля до сукупності терміналів у системі безпровідного зв’язку, сама система, базова станція, термінал та пристрій планування передачі даних до сукупності термін
Номер патенту: 74882
Опубліковано: 15.02.2006
Автори: Волтон Джей Р., Говард Стівен Дж., Волліс Марк
МПК: H04L 1/02
Мітки: планування, пристрій, система, термінал, космос-земля, спосіб, термін, безпровідного, даних, системі, станція, терміналів, лінії, зв'язку, базова, сама, передачі, сукупності
Формула / Реферат:
1. Спосіб планування передачі даних по лінії Космос-Земля до сукупності терміналів у системі безпровідного зв'язку, який включає:формування для можливої передачі даних однієї або більше груп терміналів, кожна з яких включає комбінацію одного або більше терміналів і відповідає гіпотезі, що підлягає оцінюванню,призначення сукупності передавальних антен одному або більше терміналам у кожній групі,оцінювання якості...
Попередній патент: Дозована форма ібупрофену натрію
Наступний патент: Харчовий продукт на основі борошна, що містить термостабільну альфа-амілазу, та спосіб його виготовлення
Випадковий патент: Освітлювальний пристрій