Передачі синхронізації в системі безпровідного зв’язку




Формула / Реферат
1. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить
процесор, виконаний з можливістю відправляти першу передачу синхронізації в першому місцеположенні в кадрі та відправляти другу передачу синхронізації в другому місцеположенні в кадрі, при цьому перша відстань між першими та другими місцеположеннями в кадрі відрізняється від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі; і
запам'ятовуючий пристрій, з'єднаний з процесором.
2. Пристрій за п. 1, в якому кадр містить множину субкадрів, при цьому перше місцеположення знаходиться в першому субкадрі кадру та при цьому друге місцеположення знаходиться в другому субкадрі кадру, причому перший і другий субкадри відповідають будь-яким двом з множини субкадрів в кадрі.
3. Пристрій за п. 2, в якому перший субкадр знаходиться на початку кадру, і другий субкадр є найближчим до першого субкадру, але не знаходиться в середині кадру.
4. Пристрій за п. 2, в якому перше число субкадрів, відповідних першій відстані, відрізняється від другого числа субкадрів, відповідних другій відстані.
5. Пристрій за п. 2, в якому множина груп ідентифікаторів стільника асоціативно зв'язана з множиною періодів символу в першому субкадрі, і в якому перше місцеположення відповідає одному з множини періодів символу в першому субкадрі.
6. Пристрій за п. 5, в якому процесор виконаний з можливістю визначати період символу в першому субкадрі для першої передачі синхронізації на основі групи ідентифікаторів стільника для стільника, що відправляє першу та другу передачі синхронізації.
7. Пристрій за п. 5, в якому множина груп ідентифікаторів стільника асоціативно зв'язана з попередньо визначеним періодом символу в другому субкадрі.
8. Пристрій за п. 1, в якому кадр містить множину періодів символу, і в якому число періодів символу, відповідних першій відстані, є одним з множини можливих чисел періодів символу для першої відстані.
9. Пристрій за п. 1, в якому процесор виконаний з можливістю формувати першу та другу передачі синхронізації на основі послідовності синхронізації, витягнутої на основі щонайменше однієї з послідовності CAZAC (нульова автокореляція з постійною амплітудою), послідовності псевдошуму (PN), послідовності Голея і комплементарної послідовності Голея.
10. Пристрій за п. 1, в якому процесор виконаний з можливістю формувати першу та другу передачі синхронізації на основі однієї з декількох довжин циклічного префікса.
11. Пристрій за п. 1, в якому процесор виконаний з можливістю відправляти третю передачу синхронізації в третьому місцеположенні в кадрі, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення.
12. Пристрій за п. 11, в якому перше та третє місцеположення знаходяться у суміжних періодах символу.
13. Пристрій за п. 1, в якому процесор виконаний з можливістю відправляти першу та другу передачі синхронізації по основному каналу синхронізації (P-SCH).
14. Пристрій за п. 11, в якому процесор виконаний з можливістю відправляти третю передачу синхронізації по додатковому каналу синхронізації (S-SCH).
15. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить
процесор, виконаний з можливістю відправляти перший основний код синхронізації (PSC) по основному каналу синхронізації (P-SCH) у першому місцеположенні в кадрі та відправляти другий PSC пo P-SCH у другому місцеположенні в кадрі, при цьому перша відстань між першим і другим місцеположеннями в кадрі відрізняється від другої відстані між другим місцеположенням в кадрі і першим місцеположенням у наступному кадрі; і
запам'ятовуючий пристрій, з'єднаний з процесором.
16. Спосіб для передачі синхронізації в системі безпровідного зв'язку, який включає етапи, на яких
відправляють першу передачу синхронізації в першому місцеположенні в кадрі; і
відправляють другу передачу синхронізації в другому місцеположенні в кадрі, при цьому перша відстань між першим і другим місцеположеннями в кадрі відрізняється від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі.
17. Спосіб за п. 16, в якому кадр містить множину субкадрів, і в якому перше число субкадрів, відповідних першій відстані, відрізняється від другого числа субкадрів, відповідних другій відстані.
18. Спосіб за п. 17, в якому кожний субкадр містить множину періодів символу, і в якому число періодів символу, відповідних першій відстані, є одним з множини можливих чисел періодів символу для першої відстані.
19. Спосіб за п. 16, в якому множина груп ідентифікаторів стільника асоціативно зв'язана з множиною можливих періодів символу для першої передачі синхронізації, і при цьому спосіб додатково включає етап, на якому:
визначають період символу для першої передачі синхронізації на основі групи ідентифікаторів стільника для стільника, що відправляє першу та другу передачі синхронізації.
20. Спосіб за п. 16, який додатково включає етап, на якому відправляють третю передачу синхронізації в третьому місцеположенні в кадрі, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення.
21. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить засіб відправлення першої передачі синхронізації в першому місцеположенні в кадрі; і
засіб відправлення другої передачі синхронізації в другому місцеположенні в кадрі, при цьому перша відстань між першим і другим місцеположеннями в кадрі відрізняється від другої відстані між другим місцеположенням в кадрі і першим місцеположенням в наступному кадрі.
22. Пристрій за п. 21, в якому множина груп ідентифікаторів стільника асоціативно зв'язана з множиною можливих періодів символу для першої передачі синхронізації, і при цьому пристрій додатково містить
засіб визначення періоду символу для першої передачі синхронізації на основі групи ідентифікаторів стільника для стільника, що відправляє першу та другу передачі синхронізації.
23. Пристрій за п. 21, який додатково містить
засіб відправлення третьої передачі синхронізації в третьому місцеположенні в кадрі, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення.
24. Машиночитаний носій, що включає в себе інструкції, збережені на ньому для передачі синхронізації в системі безпровідного зв'язку, що містять
перший набір інструкцій для відправлення першої передачі синхронізації в першому місцеположенні в кадрі; і
другий набір інструкцій для відправлення другої передачі синхронізації в другому місцеположенні в кадрі, при цьому перша відстань між першим і другим місцеположеннями в кадрі відрізняється від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі.
25. Машиночитаний носій за п. 24, який додатково містить
третій набір інструкцій для відправлення третьої передачі синхронізації в третьому місцеположенні в кадрі, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення.
26. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить
процесор, виконаний з можливістю приймати першу передачу синхронізації в першому місцеположенні кадру, приймати другу передачу синхронізації в другому місцеположенні в кадрі, щоб виконати виявлення першої та другої передачі синхронізації, і визначати першу відстань між першими та другими місцеположеннями в кадрі, при цьому перша відстань відмінна від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі; і
запам'ятовуючий пристрій, з'єднаний з процесором.
27. Пристрій за п. 26, в якому процесор виконаний з можливістю корелювати вхідні вибірки з послідовністю синхронізації, щоб виявляти першу та другу передачі синхронізації і визначати перше та друге місцеположення на основі результатів кореляції.
28. Пристрій за п. 26, в якому процесор виконаний з можливістю виконувати кореляцію для першої та другої передачі синхронізації на основі одного узгодженого фільтра.
29. Пристрій за п. 26, в якому процесор виконаний з можливістю визначати границю кадру на основі першої відстані.
30. Пристрій за п. 26, в якому процесор виконаний з можливістю визначати групу ідентифікаторів стільника для стільника, що відправляє першу та другу передачі синхронізації, на основі першої відстані.
31. Пристрій за п. 26, в якому процесор виконаний з можливістю визначати довжину циклічного префікса, використовувану за допомогою стільника, що відправляє першу та другу передачі синхронізації, на основі першої відстані.
32. Пристрій за п. 26, в якому процесор виконаний з можливістю приймати третю передачу синхронізації в третьому місцеположенні кадру, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення.
33. Пристрій за п. 32, в якому процесор виконаний з можливістю витягати оцінку каналу на основі першої передачі синхронізації та виконувати когерентне виявлення третьої передачі синхронізації на основі оцінки каналу.
34. Пристрій за п. 32, в якому процесор виконаний з можливістю визначати групу ідентифікаторів стільника на основі першої відстані і виконувати кореляцію для третьої передачі синхронізації на основі групи ідентифікаторів стільника, щоб одержати ідентифікатор стільника для стільника, що відправляє першу, другу та третю передачі синхронізації.
35. Спосіб для передачі синхронізації в системі безпровідного зв'язку, який включає етапи, на яких
приймають першу передачу синхронізації в першому місцеположенні кадру; приймають другу передачу синхронізації в другому місцеположенні в кадрі; виконують виявлення для першої та другої передачі синхронізації; і
визначають першу відстань між першим і другим місцеположеннями в кадрі, при цьому перша відстань відмінна від другої відстані між другим місцеположенням в кадрі і першим місцеположенням в наступному кадрі.
36. Спосіб за п. 35, який додатково включає етап, на якому визначають границю кадру на основі першої відстані.
37. Спосіб за п. 35, який додатково включає етап, на якому
визначають групу ідентифікаторів стільника для стільника, що відправляє першу та другу передачі синхронізації, на основі першої відстані.
38. Спосіб за п. 35, який додатково включає етап, на якому
визначають довжину циклічного префікса, використовувану за допомогою стільника, що відправляє першу та другу передачі синхронізації, на основі першої відстані.
39. Спосіб за п. 35, який додатково містить етапи, на яких
приймають третю передачу синхронізації в третьому місцеположенні в кадрі, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення;
витягають оцінку каналу на основі першої передачі синхронізації; і виконують когерентне виявлення третьої передачі синхронізації на основі оцінки каналу.
40. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить
засіб прийому першої передачі синхронізації в першому місцеположенні кадру;
засіб прийому другої передачі синхронізації в другому місцеположенні в кадрі;
засіб виконання виявлення для першої та другої передачі синхронізації; і
засіб визначення першої відстані між першим і другим місцеположеннями в кадрі, при цьому перша відстань відмінна від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі.
41. Пристрій за п. 40, який додатково містить
засіб визначення границі кадру на основі першої відстані.
42. Пристрій за п. 40, який додатково містить
засіб прийому третьої передачі синхронізації в третьому місцеположенні кадру, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення;
засіб витягування оцінки каналу на основі першої передачі синхронізації; і засіб виконання когерентного виявлення третьої передачі синхронізації на основі оцінки каналу.
43. Машиночитаний носій, який включає в себе інструкції, збережені на ньому для передачі синхронізації в системі безпровідного зв'язку, що містять
перший набір інструкцій для прийому першої передачі синхронізації в першому місцеположенні кадру;
другий набір інструкцій для прийому другої передачі синхронізації в другому місцеположенні в кадрі;
третій набір інструкцій для виконання виявлення першої та другої передачі синхронізації; і
четвертий набір інструкцій для визначення першої відстані між першим і другим місцеположеннями в кадрі, при цьому перша відстань відмінна від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі.
44. Машиночитаний носій за п. 43, який додатково містить
п'ятий набір інструкцій для визначення границі кадру на основі першої відстані.
45. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить
процесор, виконаний з можливістю відправляти передачу основної синхронізації у перше місцеположення в кадрі, при цьому перше місцеположення є неперекривним щонайменше з одним іншим місцеположенням, використовуваним щонайменше для однієї іншої передачі основної синхронізації, відправленої за допомогою щонайменше одного сусіднього стільника, і відправляти передачу додаткової синхронізації у другому місцеположенні в кадрі; і
запам'ятовуючий пристрій, з'єднаний з процесором.
46. Пристрій за п. 45, в якому перше місцеположення і щонайменше одне інше місцеположення відповідають різним періодам символу кадру.
47. Пристрій за п. 45, в якому перше та друге місцеположення відповідають суміжним періодам символу кадру.
48. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить
процесор, виконаний з можливістю приймати передачу основної синхронізації від першого стільника у перше місцеположення кадру, при цьому перше місцеположення є неперекривним щонайменше з одним іншим місцеположенням, використовуваним щонайменше для однієї іншої передачі основної синхронізації, відправленої за допомогою щонайменше одного сусіднього стільника у синхронізованій мережі, і приймати передачу додаткової синхронізації від першого стільника у другому місцеположенні в кадрі; і
запам'ятовуючий пристрій, з'єднаний з процесором.
49. Пристрій за п. 48, в якому процесор виконаний з можливістю витягати оцінку каналу для першого стільника на основі основної синхронізації, прийнятої від першого стільника, і виконувати когерентне виявлення передачі додаткової синхронізації, яка приймається від першого стільника, на основі оцінки каналу.
50. Пристрій за п. 48, в якому процесор виконаний з можливістю приймати другу передачу основної синхронізації від другого стільника у третьому місцеположенні кадру, при цьому третє місцеположення є одним з щонайменше одного іншого місцеположення, приймати другу передачу додаткової синхронізації від другого стільника у четвертому місцеположенні кадру, витягати другу оцінку каналу для другого стільника на основі другої основної синхронізації, прийнятої від другого стільника; і виконувати когерентне виявлення другої передачі додаткової синхронізації, яка приймається від другого стільника, на основі другої оцінки каналу.
51. Пристрій за п. 48, в якому процесор виконаний з можливістю приймати передачі основної синхронізації від першого стільника і щонайменше одного сусіднього стільника у третьому місцеположенні кадру, і виявляти передачі основної синхронізації, які приймаються в третьому місцеположенні кадру.
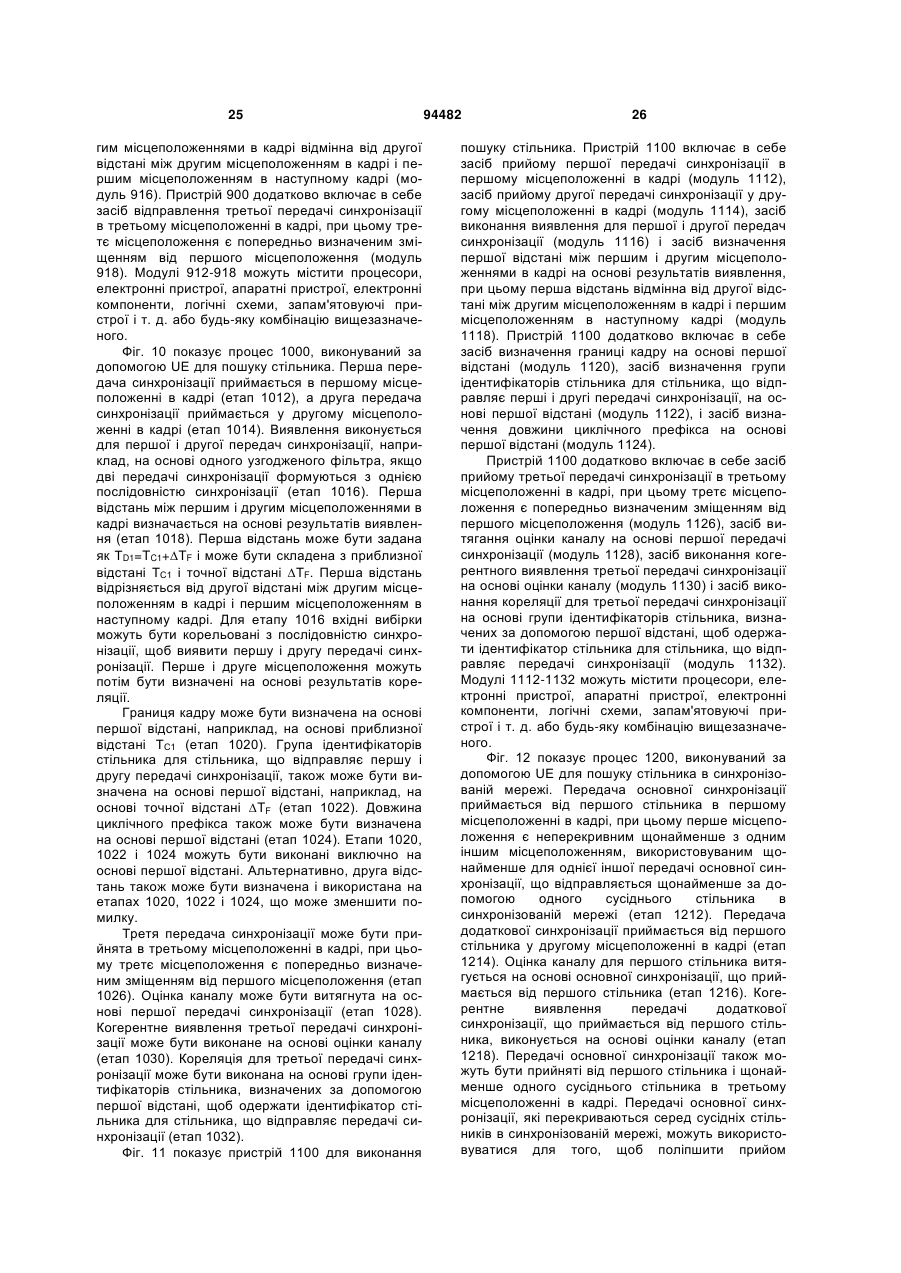
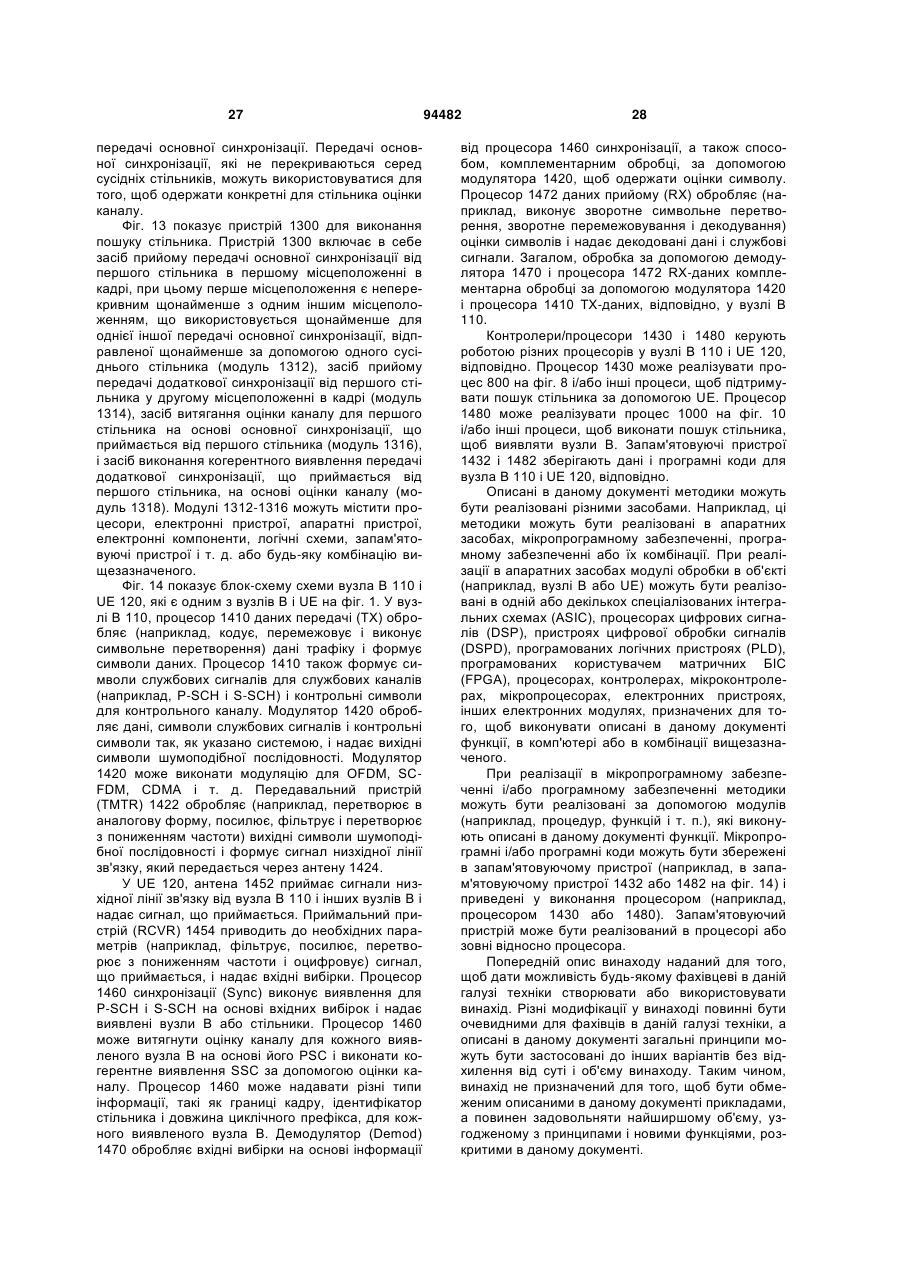
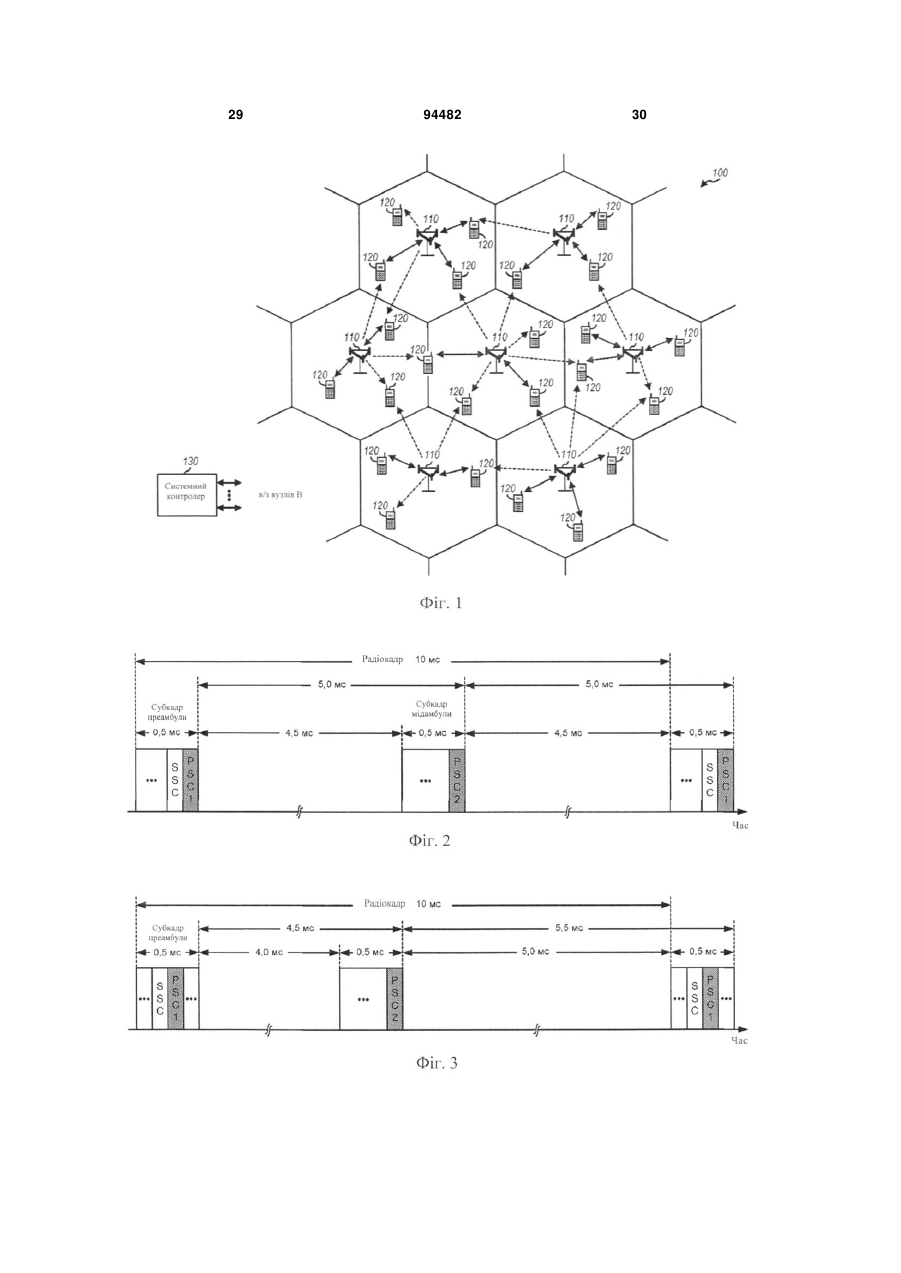
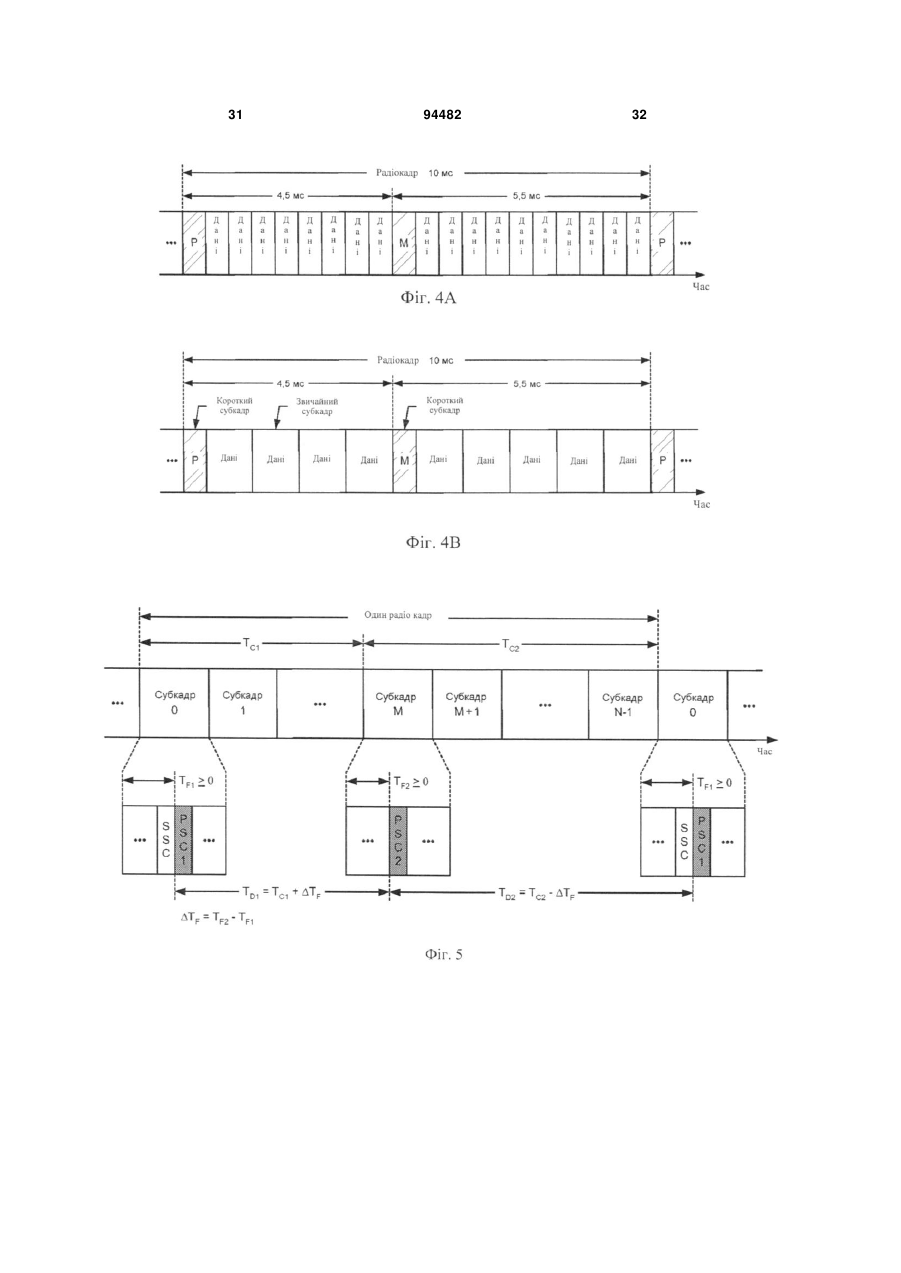
Текст
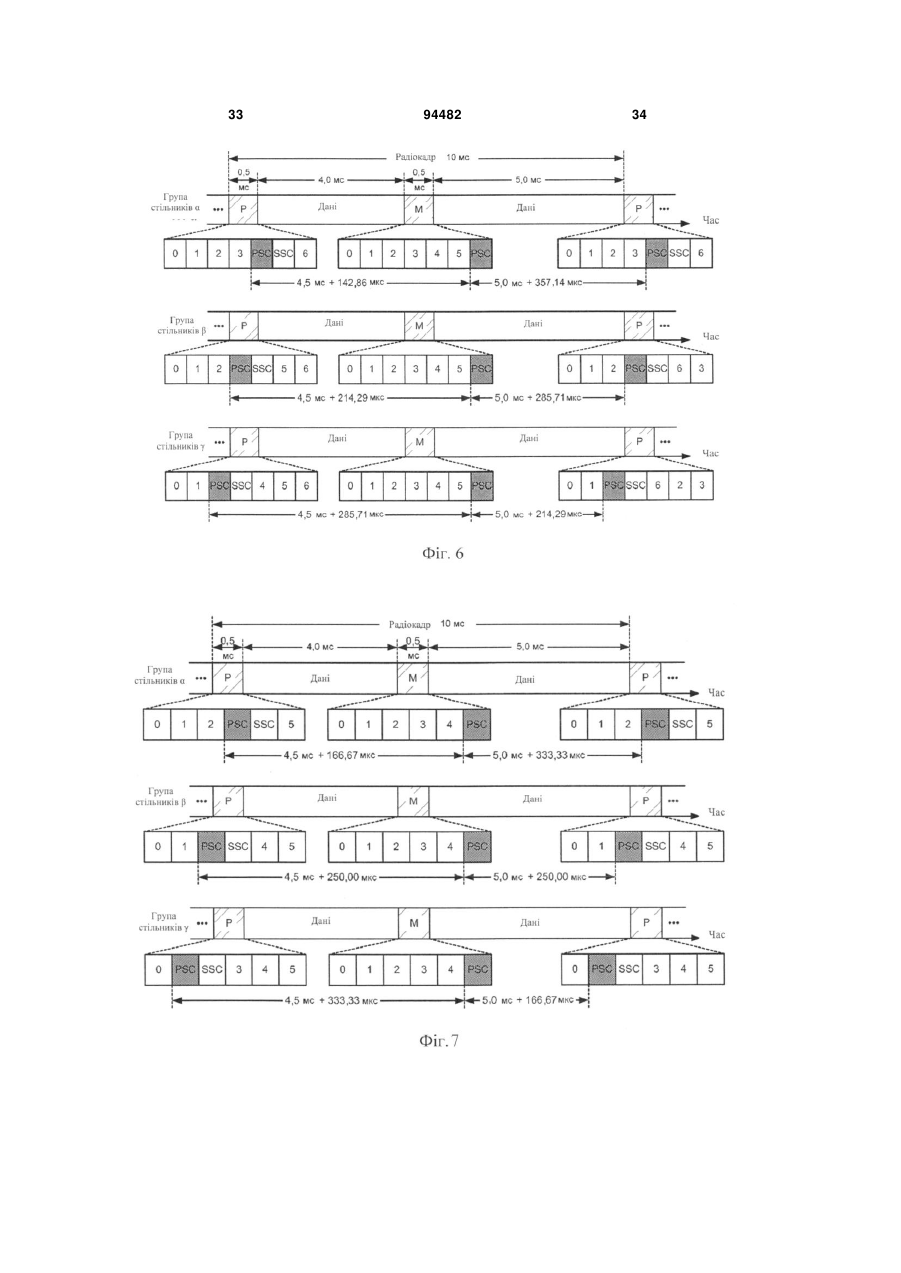
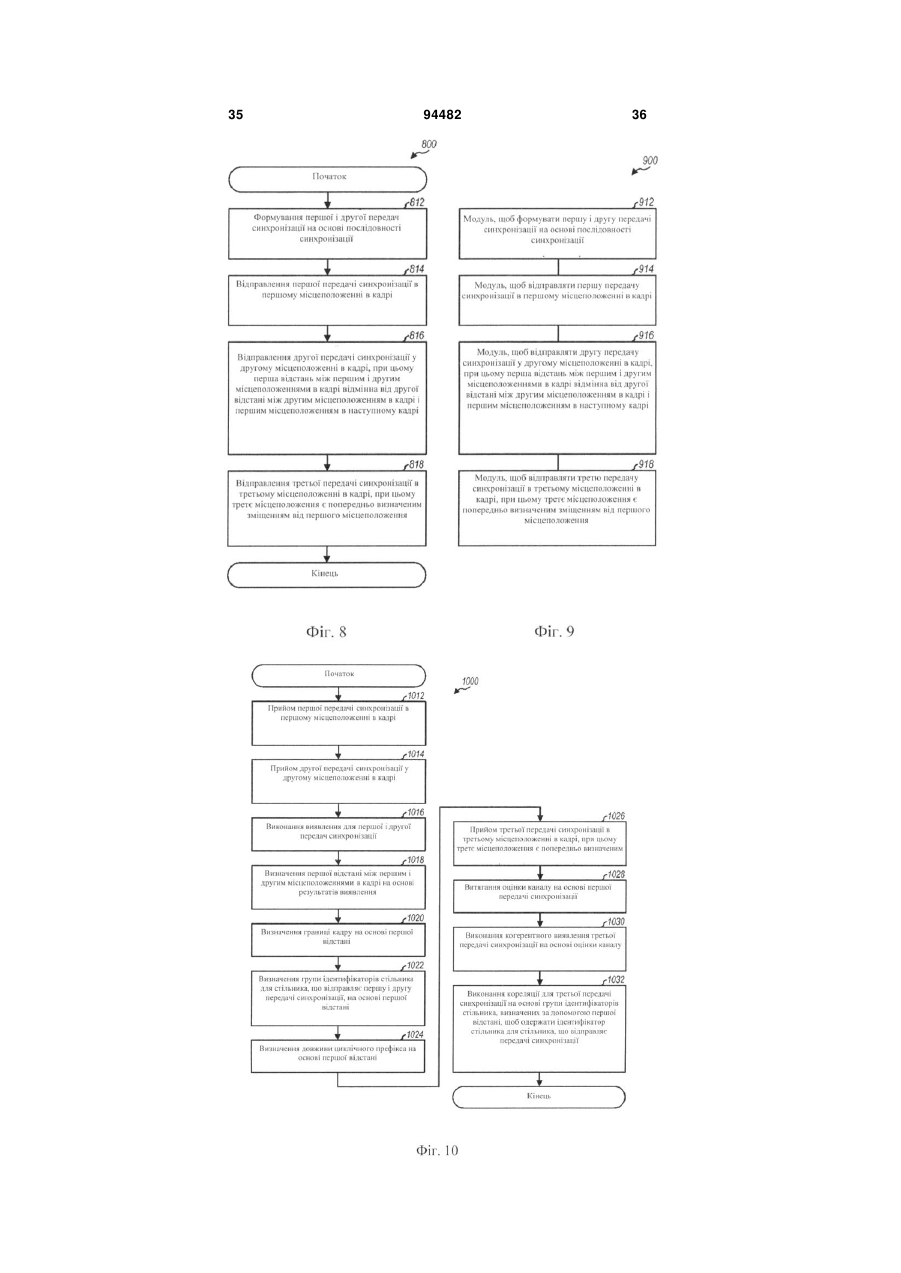
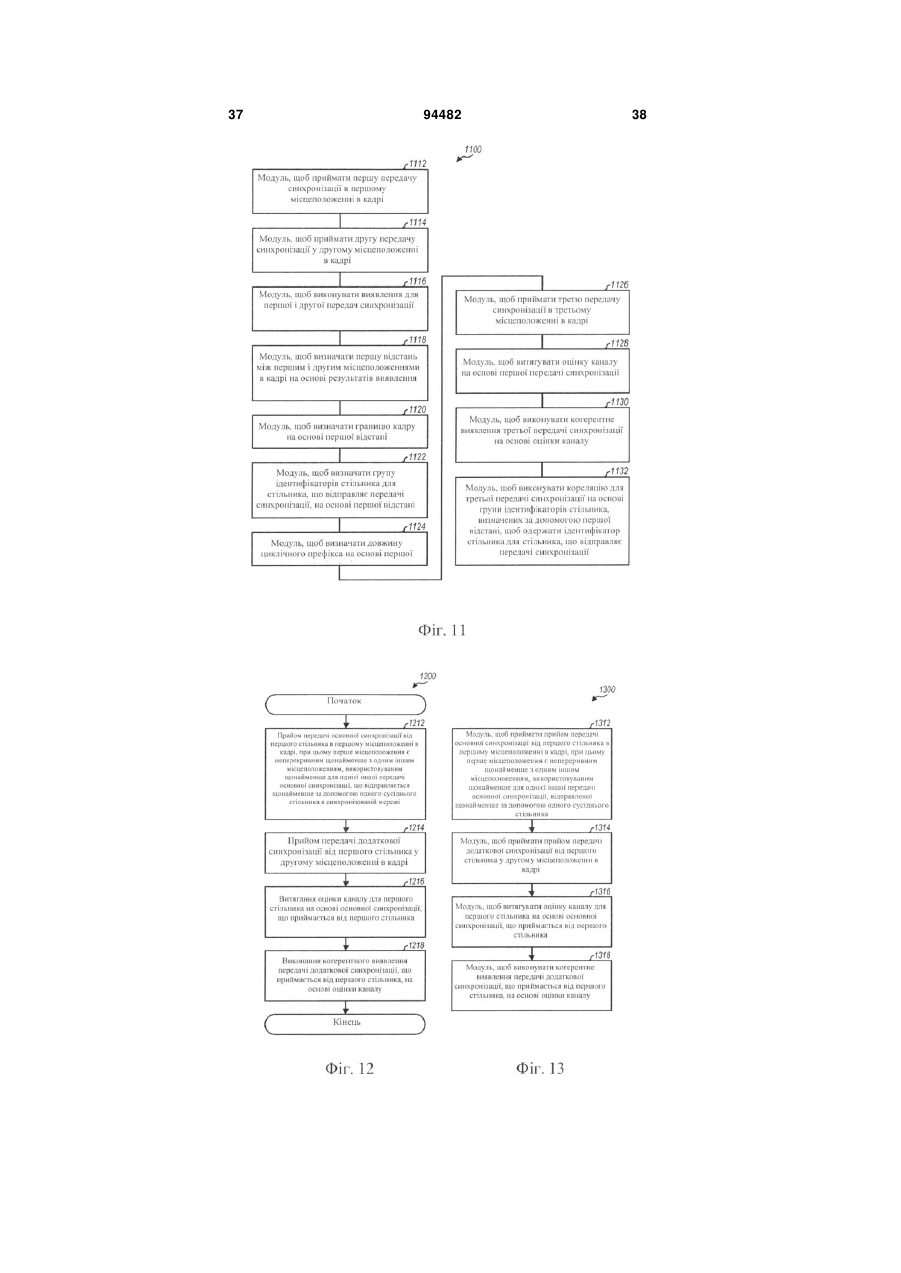
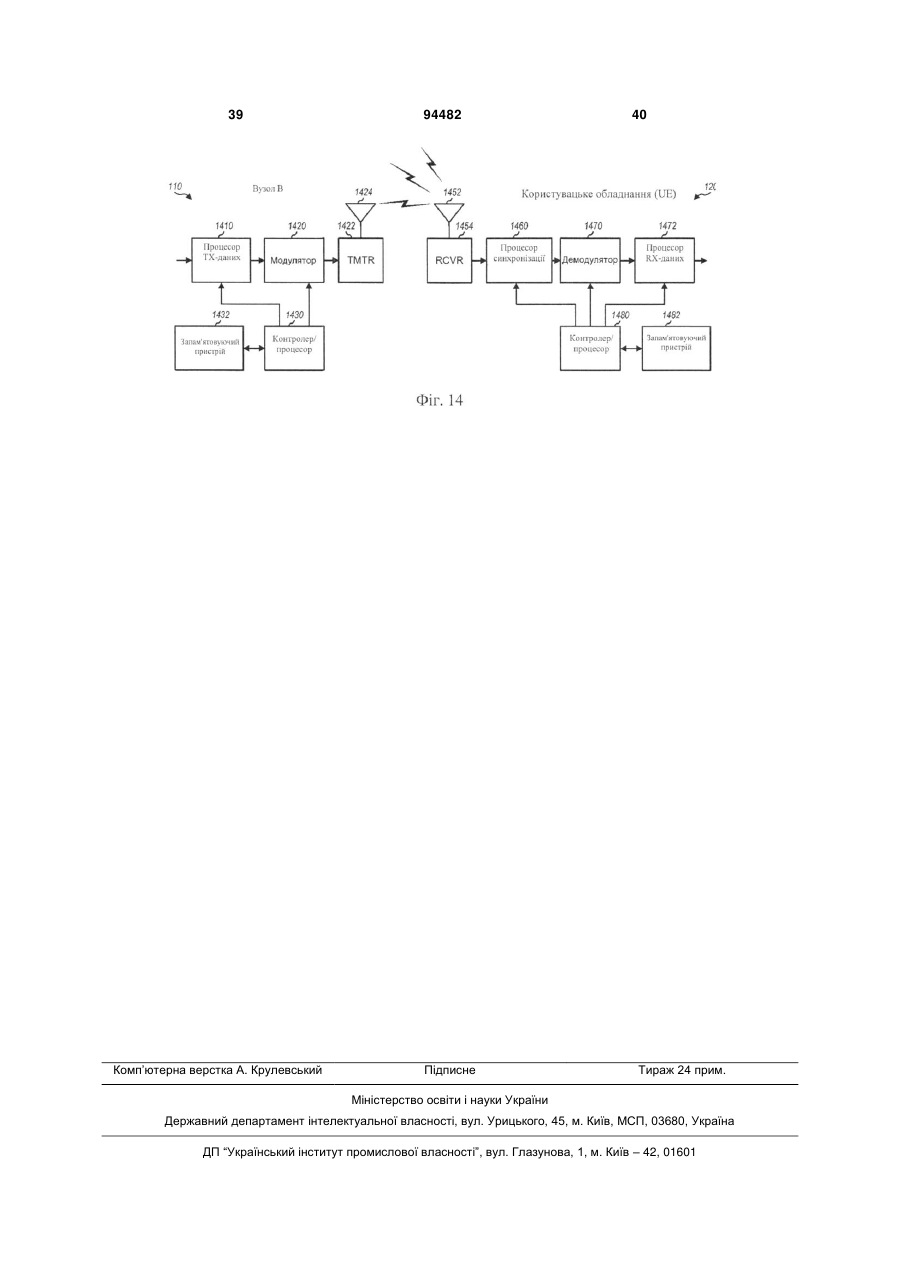
1. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить процесор, виконаний з можливістю відправляти першу передачу синхронізації в першому місцеположенні в кадрі та відправляти другу передачу синхронізації в другому місцеположенні в кадрі, при цьому перша відстань між першими та другими місцеположеннями в кадрі відрізняється від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі; і запам'ятовуючий пристрій, з'єднаний з процесором. 2. Пристрій за п. 1, в якому кадр містить множину субкадрів, при цьому перше місцеположення знаходиться в першому субкадрі кадру та при цьому друге місцеположення знаходиться в другому субкадрі кадру, причому перший і другий субкадри відповідають будь-яким двом з множини субкадрів в кадрі. 3. Пристрій за п. 2, в якому перший субкадр знаходиться на початку кадру, і другий субкадр є найближчим до першого субкадру, але не знаходиться в середині кадру. 4. Пристрій за п. 2, в якому перше число субкадрів, відповідних першій відстані, відрізняється від другого числа субкадрів, відповідних другій відстані. 5. Пристрій за п. 2, в якому множина груп ідентифікаторів стільника асоціативно зв'язана з множиною періодів символу в першому субкадрі, і в якому 2 (19) 1 3 15. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить процесор, виконаний з можливістю відправляти перший основний код синхронізації (PSC) по основному каналу синхронізації (P-SCH) у першому місцеположенні в кадрі та відправляти другий PSC пo P-SCH у другому місцеположенні в кадрі, при цьому перша відстань між першим і другим місцеположеннями в кадрі відрізняється від другої відстані між другим місцеположенням в кадрі і першим місцеположенням у наступному кадрі; і запам'ятовуючий пристрій, з'єднаний з процесором. 16. Спосіб для передачі синхронізації в системі безпровідного зв'язку, який включає етапи, на яких відправляють першу передачу синхронізації в першому місцеположенні в кадрі; і відправляють другу передачу синхронізації в другому місцеположенні в кадрі, при цьому перша відстань між першим і другим місцеположеннями в кадрі відрізняється від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі. 17. Спосіб за п. 16, в якому кадр містить множину субкадрів, і в якому перше число субкадрів, відповідних першій відстані, відрізняється від другого числа субкадрів, відповідних другій відстані. 18. Спосіб за п. 17, в якому кожний субкадр містить множину періодів символу, і в якому число періодів символу, відповідних першій відстані, є одним з множини можливих чисел періодів символу для першої відстані. 19. Спосіб за п. 16, в якому множина груп ідентифікаторів стільника асоціативно зв'язана з множиною можливих періодів символу для першої передачі синхронізації, і при цьому спосіб додатково включає етап, на якому: визначають період символу для першої передачі синхронізації на основі групи ідентифікаторів стільника для стільника, що відправляє першу та другу передачі синхронізації. 20. Спосіб за п. 16, який додатково включає етап, на якому відправляють третю передачу синхронізації в третьому місцеположенні в кадрі, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення. 21. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить засіб відправлення першої передачі синхронізації в першому місцеположенні в кадрі; і засіб відправлення другої передачі синхронізації в другому місцеположенні в кадрі, при цьому перша відстань між першим і другим місцеположеннями в кадрі відрізняється від другої відстані між другим місцеположенням в кадрі і першим місцеположенням в наступному кадрі. 22. Пристрій за п. 21, в якому множина груп ідентифікаторів стільника асоціативно зв'язана з множиною можливих періодів символу для першої передачі синхронізації, і при цьому пристрій додатково містить засіб визначення періоду символу для першої передачі синхронізації на основі групи ідентифікаторів стільника для стільника, що відправляє першу та другу передачі синхронізації. 94482 4 23. Пристрій за п. 21, який додатково містить засіб відправлення третьої передачі синхронізації в третьому місцеположенні в кадрі, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення. 24. Машиночитаний носій, що включає в себе інструкції, збережені на ньому для передачі синхронізації в системі безпровідного зв'язку, що містятьперший набір інструкцій для відправлення першої передачі синхронізації в першому місцеположенні в кадрі; і другий набір інструкцій для відправлення другої передачі синхронізації в другому місцеположенні в кадрі, при цьому перша відстань між першим і другим місцеположеннями в кадрі відрізняється від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі. 25. Машиночитаний носій за п. 24, який додатково містить третій набір інструкцій для відправлення третьої передачі синхронізації в третьому місцеположенні в кадрі, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення. 26. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить процесор, виконаний з можливістю приймати першу передачу синхронізації в першому місцеположенні кадру, приймати другу передачу синхронізації в другому місцеположенні в кадрі, щоб виконати виявлення першої та другої передачі синхронізації, і визначати першу відстань між першими та другими місцеположеннями в кадрі, при цьому перша відстань відмінна від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі; і запам'ятовуючий пристрій, з'єднаний з процесором. 27. Пристрій за п. 26, в якому процесор виконаний з можливістю корелювати вхідні вибірки з послідовністю синхронізації, щоб виявляти першу та другу передачі синхронізації і визначати перше та друге місцеположення на основі результатів кореляції. 28. Пристрій за п. 26, в якому процесор виконаний з можливістю виконувати кореляцію для першої та другої передачі синхронізації на основі одного узгодженого фільтра. 29. Пристрій за п. 26, в якому процесор виконаний з можливістю визначати границю кадру на основі першої відстані. 30. Пристрій за п. 26, в якому процесор виконаний з можливістю визначати групу ідентифікаторів стільника для стільника, що відправляє першу та другу передачі синхронізації, на основі першої відстані. 31. Пристрій за п. 26, в якому процесор виконаний з можливістю визначати довжину циклічного префікса, використовувану за допомогою стільника, що відправляє першу та другу передачі синхронізації, на основі першої відстані. 32. Пристрій за п. 26, в якому процесор виконаний з можливістю приймати третю передачу синхронізації в третьому місцеположенні кадру, при цьому 5 третє місцеположення є попередньо визначеним зміщенням від першого місцеположення. 33. Пристрій за п. 32, в якому процесор виконаний з можливістю витягати оцінку каналу на основі першої передачі синхронізації та виконувати когерентне виявлення третьої передачі синхронізації на основі оцінки каналу. 34. Пристрій за п. 32, в якому процесор виконаний з можливістю визначати групу ідентифікаторів стільника на основі першої відстані і виконувати кореляцію для третьої передачі синхронізації на основі групи ідентифікаторів стільника, щоб одержати ідентифікатор стільника для стільника, що відправляє першу, другу та третю передачі синхронізації. 35. Спосіб для передачі синхронізації в системі безпровідного зв'язку, який включає етапи, на яких приймають першу передачу синхронізації в першому місцеположенні кадру; приймають другу передачу синхронізації в другому місцеположенні в кадрі; виконують виявлення для першої та другої передачі синхронізації; і визначають першу відстань між першим і другим місцеположеннями в кадрі, при цьому перша відстань відмінна від другої відстані між другим місцеположенням в кадрі і першим місцеположенням в наступному кадрі. 36. Спосіб за п. 35, який додатково включає етап, на якому визначають границю кадру на основі першої відстані. 37. Спосіб за п. 35, який додатково включає етап, на якому визначають групу ідентифікаторів стільника для стільника, що відправляє першу та другу передачі синхронізації, на основі першої відстані. 38. Спосіб за п. 35, який додатково включає етап, на якому визначають довжину циклічного префікса, використовувану за допомогою стільника, що відправляє першу та другу передачі синхронізації, на основі першої відстані. 39. Спосіб за п. 35, який додатково містить етапи, на яких приймають третю передачу синхронізації в третьому місцеположенні в кадрі, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення; витягають оцінку каналу на основі першої передачі синхронізації; і виконують когерентне виявлення третьої передачі синхронізації на основі оцінки каналу. 40. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить засіб прийому першої передачі синхронізації в першому місцеположенні кадру; засіб прийому другої передачі синхронізації в другому місцеположенні в кадрі; засіб виконання виявлення для першої та другої передачі синхронізації; і засіб визначення першої відстані між першим і другим місцеположеннями в кадрі, при цьому перша відстань відмінна від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі. 41. Пристрій за п. 40, який додатково містить 94482 6 засіб визначення границі кадру на основі першої відстані. 42. Пристрій за п. 40, який додатково містить засіб прийому третьої передачі синхронізації в третьому місцеположенні кадру, при цьому третє місцеположення є попередньо визначеним зміщенням від першого місцеположення; засіб витягування оцінки каналу на основі першої передачі синхронізації; і засіб виконання когерентного виявлення третьої передачі синхронізації на основі оцінки каналу. 43. Машиночитаний носій, який включає в себе інструкції, збережені на ньому для передачі синхронізації в системі безпровідного зв'язку, що містять перший набір інструкцій для прийому першої передачі синхронізації в першому місцеположенні кадру; другий набір інструкцій для прийому другої передачі синхронізації в другому місцеположенні в кадрі; третій набір інструкцій для виконання виявлення першої та другої передачі синхронізації; і четвертий набір інструкцій для визначення першої відстані між першим і другим місцеположеннями в кадрі, при цьому перша відстань відмінна від другої відстані між другим місцеположенням в кадрі та першим місцеположенням в наступному кадрі. 44. Машиночитаний носій за п. 43, який додатково містить п'ятий набір інструкцій для визначення границі кадру на основі першої відстані. 45. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить процесор, виконаний з можливістю відправляти передачу основної синхронізації у перше місцеположення в кадрі, при цьому перше місцеположення є неперекривним щонайменше з одним іншим місцеположенням, використовуваним щонайменше для однієї іншої передачі основної синхронізації, відправленої за допомогою щонайменше одного сусіднього стільника, і відправляти передачу додаткової синхронізації у другому місцеположенні в кадрі; і запам'ятовуючий пристрій, з'єднаний з процесором. 46. Пристрій за п. 45, в якому перше місцеположення і щонайменше одне інше місцеположення відповідають різним періодам символу кадру. 47. Пристрій за п. 45, в якому перше та друге місцеположення відповідають суміжним періодам символу кадру. 48. Пристрій для передачі синхронізації в системі безпровідного зв'язку, який містить процесор, виконаний з можливістю приймати передачу основної синхронізації від першого стільника у перше місцеположення кадру, при цьому перше місцеположення є неперекривним щонайменше з одним іншим місцеположенням, використовуваним щонайменше для однієї іншої передачі основної синхронізації, відправленої за допомогою щонайменше одного сусіднього стільника у синхронізованій мережі, і приймати передачу додаткової синхронізації від першого стільника у другому місцеположенні в кадрі; і 7 94482 8 запам'ятовуючий пристрій, з'єднаний з процесором. 49. Пристрій за п. 48, в якому процесор виконаний з можливістю витягати оцінку каналу для першого стільника на основі основної синхронізації, прийнятої від першого стільника, і виконувати когерентне виявлення передачі додаткової синхронізації, яка приймається від першого стільника, на основі оцінки каналу. 50. Пристрій за п. 48, в якому процесор виконаний з можливістю приймати другу передачу основної синхронізації від другого стільника у третьому місцеположенні кадру, при цьому третє місцеположення є одним з щонайменше одного іншого місцеположення, приймати другу передачу додатко додаткової синхронізації від другого стільника у четвертому місцеположенні кадру, витягати другу оцінку каналу для другого стільника на основі другої основної синхронізації, прийнятої від другого стільника; і виконувати когерентне виявлення другої передачі додаткової синхронізації, яка приймається від другого стільника, на основі другої оцінки каналу. 51. Пристрій за п. 48, в якому процесор виконаний з можливістю приймати передачі основної синхронізації від першого стільника і щонайменше одного сусіднього стільника у третьому місцеположенні кадру, і виявляти передачі основної синхронізації, які приймаються в третьому місцеположенні кадру. Дана заявка вимагає пріоритет Попередньої заявки (США) серійний номер 60/828051, озаглавленої "A METHOD AND APPARATUS FOR P-SCH FOR E-UTRA", поданої 3 жовтня 2006 року, призначеної правонаступнику цієї заявки і включеної в даному документі по посиланню. Даний винахід, загалом, стосується зв'язку, а, більш конкретно, методик для підтримання пошуку стільника в системі безпровідного зв'язку. Системи безпровідного зв'язку широко розгорнуті, щоб надавати різні послуги зв'язку, наприклад, передачу мови, відео, пакетних даних, обмін повідомленнями, широкомовну передачу і т. д. Ці системи можуть бути системами множинного доступу, що допускають підтримання зв'язку для декількох користувачів за допомогою спільного використання доступних системних ресурсів. Приклади таких систем множинного доступу включають в себе системи множинного доступу з кодовим розділенням каналів (CDMA), системи множинного доступу з часовим розділенням каналів (TDMA), системи множинного доступу з частотним розділенням каналів (FDMA) і системи з ортогональним FDMA (OFDMA). Система безпровідного зв'язку може включати в себе множину базових станцій (або вузлів В), які підтримують зв'язок для множини користувацьких пристроїв (UE). UE (наприклад, стільниковий телефон) може бути в межах покриття нуля, однієї або декількох базових станцій в будь-який даний момент. UE, можливо, щойно включений або, можливо, втратив покриття і таким чином може не знати, які базові станції можуть бути прийняті. UE може виконати пошук стільника, щоб виявити базові станції і одержати синхронізацію і іншу інформацію для виявлених базових станцій. Кожна базова станція може відправляти передачі синхронізації, щоб допомогти UE виконувати пошук стільника. Загалом, передача синхронізації може бути будь-якою передачею, яка дозволяє приймальному пристрою виявляти передавальний пристрій і одержувати таку інформацію, як тактування і т. д. Передачі синхронізації представляють службову інформацію і повинні бути відправлені з мак симально можливою ефективністю. Крім того, передачі синхронізації повинні давати можливість UE виконувати пошук стільника максимально швидко і стійко до помилок. Методики для підтримання пошуку стільника за допомогою ефективної передачі інформації через передачі синхронізації описуються в даному документі. У аспекті, декілька (наприклад, дві) передач синхронізації відправляються в кадрі з нерівномірним рознесенням між передачами синхронізації. Інформація передається через нерівні відстані або інтервали часу між послідовними передачами синхронізації. Передачі синхронізації можуть відповідати основним кодам синхронізації (PSC), відправленим по основному каналу синхронізації (P-SCH), або деяким іншим передачам, відправленим по деякому іншому каналу. У іншому аспекті декілька рівнів нерівномірного рознесення передач синхронізації можуть використовуватися для того, щоб передавати різні типи інформації. У одній схемі декілька передач синхронізації відправляються в різних субкадрах кадру, і кожна передача синхронізації відправляється в одному з декількох періодів символу у відповідному субкадрі. Два рівні нерівномірного рознесення можуть бути досягнуті при цій структурі передачі. Нерівномірне рознесення на рівні субкадру може бути досягнуте за допомогою відправлення передач синхронізації в нерівномірно рознесених субкадрах і може використовуватися для того, щоб передавати границю кадру. Нерівномірне рознесення на рівні символу може бути досягнуте за допомогою відправлення однієї передачі синхронізації в одному з декількох можливих періодів символу залежно від інформації, що передається через нерівномірне рознесення на рівні символу. Наприклад, декілька груп ідентифікаторів (ID) стільників можуть бути асоціативно зв'язані з різними періодами символу, і кожному стільнику може бути призначений ідентифікатор стільника з однієї з груп. Стільник може відправляти передачу синхронізації в періоді символу для групи ідентифікаторів стільника, якій належить стільник. Відстані між послідовними передачами синхронізації також можуть використовуватися для того, щоб переда 9 вати довжину циклічного префікса, використовувану стільником. Передача додаткової синхронізації може бути відправлена в місцеположенні, яке є попередньо визначеним зміщенням від (наприклад, поруч з) однієї з декількох передач синхронізації. Передача додаткової синхронізації може відповідати додатковому коду синхронізації (SSC), відправленому по додатковому каналу синхронізації (S-SCH) або деякій іншій передачі, відправленій по деякому іншому каналу. Оцінка каналу може бути витягнута на основі суміжної або сусідньої передачі синхронізації і використана для когерентного виявлення передачі додаткової синхронізації, що може підвищити продуктивність. Далі більш детально описані різні аспекти і ознаки винаходу. Фіг. 1 ілюструє систему безпровідного зв'язку. Фіг. 2 показує два рівномірно рознесених PSC і один SSC Фіг. 3 показує два нерівномірно рознесених PSC і один SSC Фіг. 4А і 4В показують два нерівномірно рознесених PSC і один SSC в радіокадрах з рівними і нерівними субкадрами, відповідно. Фіг. 5 показує два PSC і один SSC з нерівномірним рознесенням на рівні субкадру і нерівномірним рознесенням на рівні символу. Фіг. 6 і 7 показують два нерівномірно рознесених PSC і один SSC для трьох груп стільників з невеликою і великою довжиною циклічного префікса, відповідно. Фіг. 8 показує процес, виконуваний за допомогою вузла В, щоб підтримати пошук стільника. Фіг. 9 показує пристрій для підтримання пошуку стільника. Фіг. 10 показує процес, виконуваний за допомогою UE для пошуку стільника. Фіг. 11 показує пристрій для виконання пошуку стільника. Фіг. 12 показує інший процес, виконуваний за допомогою UE для пошуку стільника. Фіг. 13 показує інший пристрій для виконання пошуку стільника. Фіг. 14 показує блок-схему вузла В і UE. Фіг. 1 ілюструє систему 100 безпровідного зв'язку з декількома вузлами В 110. Вузол В - це, загалом, стаціонарна станція, яка обмінюється даними з UE, і він також може згадуватися як базова станція, вдосконалений вузол В (eNode В), точка доступу і т. д. Кожний вузол В 110 надає покриття зв'язку для конкретної географічної області. Термін "стільник" може стосуватися вузла В і/або його зони покриття, залежно від контексту, в якому використовується термін. Щоб підвищити пропускну здатність системи, зона покриття вузла В може бути секціонована на декілька менших областей (наприклад, три менших області), і кожна менша область може обслуговуватися за допомогою відповідної базової приймальнопередавальної станції (BTS). Термін "сектор" може стосуватися BTS і/або її зоні покриття, залежно від контексту, в якому використовується термін. Для секторизованого стільника, BTS для всіх секторів цього стільника типово спільно розташовані в ме 94482 10 жах вузла В стільника. Методики, описані в даному документі, можуть бути використані для систем з секторизованими стільниками, а також систем з несекторизованими стільниками. Для простоти, в подальшому описі і формулі винаходу термін "стільник" може, загалом, згадуватися як вузол В і/або його зона покриття в системі з несекторизованими стільниками, і як BTS і/або її зона покриття в системі з секторизованими стільниками. UE 120 можуть бути розподілені за системою. UE може бути стаціонарним або мобільним і також може згадуватися як мобільна станція, мобільний пристрій, термінал, термінал доступу, станція і т. д. Користувача обладнанням UE може бути стільниковий телефон, персональний цифровий пристрій (PDA), безпровідний модем, пристрій безпровідного зв'язку, кишеньковий пристрій, портативний комп'ютер, абонентський пристрій, безпровідний телефон і т. д. UE може обмінюватися даними з одним або більше вузлами В через передачі по низхідній лінії зв'язку і висхідній лінії зв'язку. Низхідна лінія зв'язку (або пряма лінія зв'язку) стосується лінії зв'язку від вузлів В до UE, а висхідна лінія зв'язку (або зворотна лінія зв'язку) стосується лінії зв'язку від UE до вузлам В. На фіг. 1, суцільна лінія з подвійними стрілками вказує зв'язок між вузлом В і UE. Переривиста лінія з однією стрілкою вказує прийом за допомогою UE сигналу низхідної лінії зв'язку від вузла В. UE може виконувати пошук стільника на основі сигналів низхідної лінії зв'язку від вузлів В в системі. Системний контролер 130 може підключатися до вузлів В 110 і надавати координацію і керування для цих вузлів В. Системний контролер 130 може бути одним мережним об'єктом або набором мережних об'єктів. Системний контролер 130 може містити контролер радіомережі (RNC), центр комутації мобільного зв'язку (MSC) і т. д. Методики, описані в даному документі, можуть використовуватися для різних систем безпровідного зв'язку, таких як системи CDMA, FDMA, TDMA, OFDMA і SC-FDMA. Терміни "системи" і "мережі" часто використовуються взаємозамінно. Система CDMA може реалізовувати таку технологію радіозв'язку, як cdma2000, універсальний наземний радіодоступ (UTRA), розвинений UTRA (E-UTRA) і т. д. Cdma2000 охоплює стандарти IS-2000, IS-95 і IS-856. UTRA включає в себе широкосмугову CDMA (W-CDMA) і стандарт низької швидкості при передачі символів шумоподібної послідовності (LCR). TDMA-система може реалізовувати таку технологію радіозв'язку, як глобальна система мобільного зв'язку (GSM). OFDMA-система використовує мультиплексування з ортогональним частотним розділенням каналів (OFDM) і відправляє символи модуляції в частотній області по ортогональних піднесучих, які також можуть згадуватися як тони, елементи розрізнення і т. д. OFDMAсистема може реалізовувати таку технологію радіозв'язку, як довгостроковий розвиток (LTE), Flash-OFDM® і т. д. SC-FDMA-система використовує мультиплексування з частотним розділенням каналів з однією несучою (SC-FDM) і відправляє символи модуляції у часовій області по ортогональних піднесучих. UTRA, E-UTRA, GSM і LTE опи 11 суються в документах організації, званої Партнерським проектом третього покоління (ЗGPP). Cdma2000 описується в документах організації, званої Партнерським проектом третього покоління 2 (3GPP2). Ці різні технології і стандарти радіозв'язку відомі в даній галузі техніки. Для ясності певні аспекти методик описуються нижче для E-UTRA і LTE, і термінологія 3GPP використовується у великій частині опису нижче. В системі 100, вузли В 110 можуть періодично відправляти передачі синхронізації, щоб дозволити UE 120 виявляти вузли В і одержувати таку інформацію, як тактування, ідентифікатор стільника і т. д. Передачі синхронізації можуть бути відправлені по-різному. У одній схемі, яка описується детально нижче, кожний вузол В періодично передає P-SCH і S-SCH. P-SCH може переносити один або більше PSC в кожному радіокадрі попередньо визначеної тривалості. S-SCH може переносити один або більше SSC в кожному радіокадрі. UE може виконувати пошук вузлів В або стільників за допомогою двостадійного процесу виявлення. На першій стадії або стадії виявлення PSC UE може виявляти стільники на основі PSC, відправлених по P-SCH, і одержувати синхронізацію для кожного виявленого стільника. UE також може витягувати оцінку каналу для кожного виявленого стільника на основі PSC, що приймається з цього стільника. На другій стадії або стадії виявлення SSC UE може ідентифікувати кожний виявлений стільник на основі SSC, відправленого по S-SCH. Щоб підвищити продуктивність виявлення SSC, UE може виконувати когерентне виявлення SSC для кожного виявленого стільника з оцінкою каналу, одержаною з PSC для цього стільника. Загалом, один або декілька PSC можуть бути відправлені в кожному радіокадрі. Декілька PSC можуть поліпшити час пошуку і зменшити складність пошуку за допомогою (а) скорочення кількості гіпотез синхронізації/вибірки, щоб тестувати між послідовними PSC, і (b) підвищення енергії сигналу через комбінування PSC, що приймаються в межах даного періоду часу. Проте, відправлення дуже великої кількості PSC в радіокадрі може привести в результаті до великого обсягу службової інформації і великої втрати смуги пропускання, а також може накласти додаткове навантаження на стадію виявлення SSC за рахунок збільшення числа гіпотез для границі кадру. У одній схемі, яка описується в більшій частині подальшого опису, два PSC відправляються в радіокадрі і можуть надавати хороший компроміс між різними міркуваннями, відміченими вище. Проте, методики, описані в даному документі, можуть використовуватися для інших схем з більше ніж двома PSC на радіокадр. Фіг. 2 показує зразкову передачу двох PSC і одного SSC в радіокадрі з рівномірним рознесенням між PSC. Радіокадр може мати тривалість 10 мілісекунд (мс) і може бути фрагментований на 20 субкадрів, при цьому кожний субкадр має тривалість 0,5 мс, як показано на фіг. 2. Перший PSC (PSC1) і SSC відправляються в субкадрі преамбули, який є першим субкадром радіокадру. Другий PSC (PSC2) відправляється в субкадрі мідамбули, 94482 12 який є 11-тим субкадром радіокадру. Субкадри преамбули і мідамбули, кожний, можуть включати в себе декілька періодів символу. PSC1 може бути відправлений в останньому періоді символу субкадру преамбули, a PSC2 може бути відправлений в останньому періоді символу субкадру мідамбули. Відстань від кінця PSC1 до кінця PSC2 може становити 5 мс, а відстань від кінця PSC2 до кінця PSC1 в наступному радіокадрі може становити 5 мс, як показано на фіг. 2. Рознесення між PSC в такому випадку повинно бути рівномірним з постійною відстанню 5 мс між двома послідовними PSC. Фіг. 2 показує використання двох різних PSC для P-SCH. Кожний PSC може бути виявлений за допомогою виконання узгодженої фільтрації для вхідних вибірок за допомогою цього PSC. Два узгоджених фільтри можуть використовуватися для двох різних PSC і можуть працювати одночасно для одних і тих же вхідних вибірок, щоб швидко визначити те, чи прийнятий PSC1 або PSC2. Щоб зменшити обчислювальну складність, один PSC може використовуватися і для PSC1, і для PSC2, і форми сигналу для PSC1 і PSC2 в такому випадку повинні бути ідентичними. Один узгоджений фільтр потім може використовуватися для того, щоб виявити PSC1, відправлений в субкадрі преамбули, а також PSC2, відправлену в субкадрі мідамбули. З рівномірним рознесенням кодів PSC і використанням одного PSC для субкадрів преамбули і мідамбули, границя символу P-SCH може бути виявлена за допомогою узгодженої фільтрації вхідних вибірок для кожного періоду вибірок або гіпотези синхронізації. Узгоджена фільтрація повинна надавати пік кожного разу, коли PSC виявляється у вхідних вибірках. Піки PSC з узгодженої фільтрації повинні бути рівномірно рознесені приблизно на 5 мс. Два піки PSC можуть бути виявлені в даному радіокадрі, і може бути неоднозначність відносно того, який з двох піків PSC відповідає границі радіокадру. Отже, може бути дві гіпотези границі кадру, відповідні двом пікам PSC. Якщо SSC відправляється тільки в субкадрі преамбули, як показано на фіг. 2, то виявлення SSC може бути виконане для кожної з двох гіпотез границі кадру. Границя кадру потім може бути визначена, коли SSC виявляється. Проте, обробка для виявлення SSC може бути подвоєна, оскільки вона може бути виконана для двох гіпотез границі кадру. Крім того, виявлення SSC для кожної гіпотези границі кадру може бути складним, якщо є багато можливих значень (наприклад, багато можливих ідентифікаторів стільника) для SSC. У аспекті PSC відправляються з нерівномірним рознесенням, і інформація передається через нерівні відстані або інтервали часу між послідовними PSC. Нерівномірне рознесення також може згадуватися як нерівномірне місцеположення, нерівномірне позиціонування і т. д. Нерівномірне рознесення може бути досягнуте за допомогою відправлення PSC в субкадрах, які не рознесені рівномірно в радіокадрі. Фіг. 3 показує зразкову передачу двох PSC і одного SSC в радіокадрі з нерівномірним розне 13 сенням між PSC. У цьому прикладі PSC1 і SSC відправляються в субкадрі преамбули, a PSC2 відправляється в субкадрі мідамбули. Проте, відстань від кінця субкадру преамбули до кінця субкадру мідамбули (ТС1) відрізняється від відстані від кінця субкадру мідамбули до кінця субкадру преамбули в наступному радіокадрі (ТC2). Радіокадр може мати тривалість 10 мс і може включати в себе 20 субкадрів, при цьому кожний субкадр має тривалість 0,5 мс. PSC1 може бути відправлений в першому субкадрі, PSC2 може бути відправлений в 10-тому субкадрі (замість 11-того субкадру), ТС1 може дорівнювати 4,5 мс, а ТС2 може дорівнювати 5,5 мс, як показано на фіг. 3. TC1 і ТС2 також можуть бути іншими значеннями, так що ТС1 не дорівнює ТС2. З нерівномірним рознесенням PSC узгоджена фільтрація може бути виконана для вхідних вибірок, щоб одержати піки PSC, як описано вище. Відстані ТC1 і ТС2 між піками PSC можуть використовуватися для того, щоб визначити границю кадру, навіть коли один PSC використовується для субкадрів преамбули і мідамбули. Виявлення SSC також може бути спрощене при знанні границі кадру. Нерівномірне рознесення між PSC може бути досягнуте за допомогою різних структур кадру. Загалом, радіокадр може мати будь-яку тривалість і може включати в себе будь-яке число субкадрів, і субкадри можуть мати однакову або різну тривалість. Фіг. 4А показує передачу двох нерівномірно рознесених PSC і одного SSC в радіокадрі з субкадрами рівної тривалості. У цьому прикладі радіокадр включає в себе 20 субкадрів, при цьому кожний субкадр має тривалість 0,5 мс. PSC1 може бути відправлений в субкадрі преамбули (позначеному як "Р" на фіг. 4А), який може бути першим субкадром радіокадру. PSC2 може бути відправлений в субкадрі мідамбули (позначеному як "М" на фіг. 4А), який може бути 10-тим субкадром (як показано в 4А), 12-тим субкадром або будь-яким субкадром крім 11-того субкадру. Фіг. 4В показує передачу двох нерівномірно рознесених PSC і одного SSC в радіокадрі з субкадрами різної тривалості. У цьому прикладі радіокадр включає в себе 11 субкадрів, причому субкадри преамбули і мідамбули, кожний, мають тривалість 0,5 мс, а субкадри, що залишилися, кожний, мають тривалість 1,0 мс. PSC1 може бути відправлений в субкадрі преамбули, який може бути першим субкадром радіокадру. PSC2 може бути відправлений в субкадрі мідамбули, який може бути 6-тим субкадром (як показано в 4А), 7-им субкадром і т. д. Як показано на фіг. 4А і 4В, дані і/або інша інформація можуть бути відправлені в субкадрах між преамбулою і мідамбулою і в субкадрах між мідамбулою і преамбулою. Нерівномірне рознесення між PSC може бути досягнуте без порушення або утворення розривності в субкадрах даних. У іншому аспекті декілька рівнів нерівномірного рознесення PSC використовуються для того, щоб передавати різні типи інформації. Декілька PSC можуть бути відправлені в декількох субкад 94482 14 рах радіокадру, і кожний PSC може бути відправлений в одному з декількох періодів символу у відповідному субкадрі, наприклад, як показано на фіг. 2 і 3. Два рівні нерівномірного рознесення можуть бути досягнуті при цій структурі передачі PSC. Нерівномірне рознесення на рівні субкадру може бути досягнуте за допомогою відправлення PSC в нерівномірно рознесених субкадрах, наприклад, як показано на фіг. 3. Нерівномірне рознесення на рівні символу може бути досягнуте за допомогою відправлення PSC в періоди символу, вибрані на основі інформації, що передається через нерівномірне рознесення на рівні символу. Загалом, система може використовувати тільки нерівномірне рознесення на рівні субкадру або тільки нерівномірне рознесення на рівні символу, або нерівномірне рознесення і на рівні субкадру, і на рівні символу. Фіг. 5 показує схему для передачі двох PSC і одного SSC в радіокадрі з нерівномірним рознесенням на рівні субкадру і нерівномірним рознесенням на рівні символу. Один PSC може використовуватися і для PSC1, і для PSC2, щоб спростити виявлення кодів PSC Для нерівномірного рознесення на рівні субкадру PSC1 і SSC відправляються в субкадрі 0, a PSC2 відправляється в субкадрі M радіокадру з N субкадрами, де M і N можуть бути належним чином вибраними цілочисловими значеннями. Відстань від початку субкадру 0 з PSC1 до початку субкадру M з PSC2 становить ТС1=М, а відстань від початку субкадру M з PSC2 до початку наступного субкадру 0 з PSC1 становить TC2=N-M, де ТС1TC2. PSC1 і PSC2 також можуть бути відправлені в інших нерівномірно рознесених субкадрах так, щоб ТС1 і ТС2. Може бути переважним мати невелику різницю між ТС1 і ТС2. Якщо різниця є великою, то переваги (відносно часу пошуку і складності) використання двох PSC в одному радіокадрі можуть зменшитися. Для нерівномірного рознесення на рівні символу PSC1 відправляється в періоді символу, який становить TF1 від початку субкадру 0, a PSC2 відправляється в періоді символу, який становить TF2 від початку субкадру М, де, загалом, TF10 і TF20. Якщо PSC1 використовується як оцінка каналу для когерентного виявлення SSC в субкадрі 0, то SSC може бути розміщений максимально близько до PSC1 або до, або після PSC1, так, щоб оцінка каналу, одержана з PSC1, співпадала з фактичною характеристикою каналу, спостережуваною за допомогою SSC, максимально близько. Сумарна відстань від початку PSC1 до початку PSC2 дорівнює TD1=TC1+TF, де TF=TF2-TF1. Сумарна відстань від початку PSC2 до початку наступного PSC1 дорівнює TD2=TC2-TF. Сумарна відстань TD1 складається з приблизної відстані ТС1 і точної відстані TF1, а сумарна відстань TD2 складається з приблизної відстані ТС2 і точної відстані TF. Приблизні відстані TC1 і ТС2 можуть використовуватися для того, щоб передавати певну інформацію, наприклад, границю радіокадру. Точна відстань TF може використовуватися для того, щоб передавати іншу інформацію. Обсяг інформації, який може бути переданий через точну відс 15 тань TF, залежить від числа періодів символу, доступних для того, щоб відправити PSC1 i PSC2. У одній схемі точна відстань TF використовується для того, щоб передавати інформацію про групу стільників. Ідентифікатори доступних стільників в системі можуть бути розділені на декілька (G) груп, при цьому кожна група містить різний піднабір всіх ідентифікаторів доступних стільників. Кожному стільнику може бути призначений конкретний ідентифікатор стільника з однієї з G груп. Використання декількох груп стільників дозволяє спростити виявлення SSC. UE може виявляти для PSC і визначати точну відстань TF між піками PSC. UE потім може виконати виявлення SSC тільки для однієї групи ідентифікаторів стільника, вказаних за допомогою точної відстані TF, замість всіх ідентифікаторів доступних стільників. Кількість гіпотез ідентифікаторів стільника для стадії виявлення SSC тим самим може бути скорочена за рахунок наявності декількох груп ідентифікаторів стільника. Наприклад, якщо три групи сформовано, то обробка для виявлення SSC може бути зменшена на одну третину. У одній схемі G групам ідентифікаторів стільників призначаються різні періоди символу для PSC1. Ідентифікатори стільників в різних групах можуть бути призначені сусіднім стільникам, які можуть створювати сильні перешкоди один для одного. За допомогою використання різних періодів символу для PSC1 серед сусідніх стільників UE може мати можливість одержати оцінки каналу для конкретних стільників навіть в синхронізованій мережі. UE може використовувати конкретні для стільника оцінки каналу для когерентного виявлення SSC, що дозволяє підвищити продуктивність і зменшити складність. У одній схемі PSC2 відправляється в один період символу за допомогою сусідніх стільників. Система може керуватися як одночастотна мережа (SFN) або може відправити певні передачі за допомогою SFN-операції. SFN належить до синхронізованої передачі інформації від декількох стільників, яка може поліпшити прийом інформації за допомогою UE. Якщо сусідні стільники відправляють PSC2 в один період символу, то UE можуть мати можливість зібрати більше енергії для PSC2, що дозволяє підвищити ефективність виявлення PSC. Стільники можуть відправляти конкретну інформацію стільника і конкретний для стільника SSC в субкадрі преамбули навіть в операції SFN. Фіг. 6 показує схему для передачі двох нерівномірно рознесених PSC і одного SSC в радіокадрі зі зміщеним PSC1. Один PSC може використовуватися для обох PSC, щоб спростити виявлення цих PSC. У цій схемі радіокадр має тривалість 10 мс. Субкадри преамбули і мідамбули мають тривалість 0,5 мс і включають в себе сім періодів символу, яким призначені індекси від 0 до 6. Кожний період символу має тривалість 7143 мікросекунд (мкс). Ідентифікатори доступних стільників діляться на три групи, які згадуються як групи стільників , і . Для нерівномірного рознесення на рівні субкадру PSC1 і SSC відправляються в субкадрі преамбули, a PSC2 відправляється в субкадрі мідамбу 94482 16 ли. Відстань від субкадру преамбули до субкадру мідамбули становить ТC1=4,5 мс, а відстань від субкадру мідамбули до наступного субкадру преамбули становить ТС2=5,5 мс. Для нерівномірного рознесення на рівні символу PSC1 для групи стільників відправляється в період символу 4 субкадру преамбули, PSC1 для групи стільників відправляється в період символу 3, a PSC1 для групи стільників відправляється в період символу 2. PSC2 для всіх трьох груп стільників відправляються в період символу 6 субкадру мідамбули. SSC для кожної групи стільників відправляється відразу після PSC1 для цієї групи стільників. Для групи стільників , сумарна відстань від початку PSC1 до початку PSC2 становить TD1, = 4,5 мс + 142,86 мкс, сумарна відстань від початку PSC2 до початку наступного PSC1 становить TD2, = 5,0 мс + 357,14 мкс, а точна відстань складає TF, = 142,86 мкс. Для групи стільників , сумарна відстань від початку PSC1 до початку PSC2 становить ТD1, = 4,5 мс + 214,29 мкс, сумарна відстань від початку PSC2 до початку наступного PSC1 становить TD2, = 5,0 мс + 285,71 мкс, а точна відстань складає TF, = 214,29 мкс. Для групи стільників , сумарна відстань від початку PSC1 до початку PSC2 становить ТD1, = 4,5 мс + 285,71 мкс, сумарна відстань від початку PSC2 до початку наступного PSC1 становить TD2, = 5,0 мс + 214,29 мкс, а точна відстань складає TF, = 285,71 мкс. Групи стільників , і , таким чином, можуть відрізнятися за допомогою різних точних відстаней 142,86, 214,29 і 285,71 мкс, відповідно. Фіг. 6 показує конкретну схему для нерівномірного рознесення на рівні субкадру і на рівні символу PSC. Для структури кадру, показаної на фіг. 6, до 7 груп стільників можуть бути призначені до 7 різним періодам символу в субкадрі преамбули і тому ж періоду символу в субкадрі мідамбули. PSC2 може бути відправлений в останньому періоді символу субкадру мідамбули, як показано на фіг. 6. У цьому випадку, точна відстань для групи стільників g може бути задана як TF,g=71,43g мкс, для g=0, 1, 6. PSC2 також може бути відправлений в деякому іншому періоді символу субкадру мідамбули. SSC може бути відправлений в періоді символу до або після PSC1, якщо оцінка каналу від PSC1 використовується для виявлення SSC. У іншій схемі для структури кадру, показаної на фіг. 6, PSC1 для всіх груп стільників може бути відправлений в попередньо визначеному періоді символу субкадру преамбули, a PSC2 для 7 груп стільників може бути відправлений в аж до 7 різних періодів символу субкадру мідамбули. У цій схемі ролі PSC1 і PSC2 перемикаються, і SSC може бути відправлений поруч з PSC2 (замість PSC1). У ще одній схемі різним групам стільників можуть бути призначені різні періоди символу субкадру преамбули, а також різні періоди символу субкадру мідамбули. Для структури кадру, показаної на фіг. 6, до 13 групам стільників можуть бути призначені різні періоди символу субкадрів преамбули і мідамбули так, що точна відстань для групи g стільників може бути задана як TF,g=71,43(g-6) 17 94482 мкс, для g=0, 1, 12. Для g
ДивитисяДодаткова інформація
Назва патенту англійськоюSynchronization transmission in a wireless communication system
Автори англійськоюKim, Byoung-hoon, Malladi, Durga, Prasad
Назва патенту російськоюПередача синхронизации в системе беспроводной связи
Автори російськоюКим Биоунг-хоон, Маллади Дурга Прасад
МПК / Мітки
МПК: H04L 5/00, H04L 27/26, H04B 1/707
Мітки: безпровідного, передачі, системі, зв'язку, синхронізації
Код посилання
<a href="https://ua.patents.su/20-94482-peredachi-sinkhronizaci-v-sistemi-bezprovidnogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Передачі синхронізації в системі безпровідного зв’язку</a>
Спосіб одночасної передачі сукупності типів даних та спосіб прийому передачі, мультиплексованої з розділенням часу у системі безпровідного звязку, а також передавальний та приймальний вузли такої системи
Номер патенту: 74396
Опубліковано: 15.12.2005
Автори: Вілленеґґер Серж, Ландбі Стайн А.
МПК: H04J 4/00, H04L 27/00, H04J 13/00, H04B 7/26
Мітки: спосіб, часу, сукупності, такої, системі, передавальний, передачі, зв'язку, вузлі, розділенням, прийому, безпровідного, приймальний, одночасної, типів, даних, також, мультиплексованої
Формула / Реферат:
1. Спосіб одночасної передачі сукупності типів даних у системі безпровідного зв'язку, який включає:- прийом і обробку першого типу даних згідно з першою схемою обробки сигналу для генерування першого корисного навантаження,- прийом і обробку другого типу даних згідно з другою схемою обробки сигналу для генерування другого корисного навантаження,- визначення у інтервалі передачі першої частини, призначеної для передачі...
Спосіб і пристрій для обробки даних для передачі в системі безпровідного зв’язку (варіанти), передавач в системі безпровідного зв’язку і пристрій безпровідного зв’язку
Номер патенту: 86927
Опубліковано: 10.06.2009
Автори: Кетчум Джон У., Уолтон Джей Р.
МПК: H04L 1/00, H04B 7/04, H04L 27/26, H04B 7/06, H04J 11/00, H04L 1/02
Мітки: варіанти, пристрій, системі, зв'язку, спосіб, обробки, передачі, безпровідного, даних, передавач
Формула / Реферат:
1. Спосіб обробки даних для передачі з пристрою безпровідного зв'язку, що містить етапи, на яких:вибирають режим передачі з рознесенням з множини режимів передачі з рознесенням, при цьому множина режимів передачі з рознесенням включає в себе режим передачі з просторово-часовим рознесенням передачі, в якому просторово-часове рознесення передачі використовується для передачі першої пари символів передачі, використовуючи першу пару антен,...
Передача службової інформації для послуг широкомовної і багатоадресної передачі в системі безпровідного зв’язку
Номер патенту: 85241
Опубліковано: 12.01.2009
Автори: Мантраваді Ашок, Малладі Дурга П., Муралі Рамасвамі, Агравал Авніш, Стамоуліс Анастасіос
МПК: H04L 29/06, H04Q 7/38
Мітки: зв'язку, системі, багатоадресної, послуг, безпровідного, широкомовної, передача, передачі, інформації, службової
Формула / Реферат:
1. Пристрій для передачі службової інформації для послуг широкомовної і багатоканальної передачі в системі безпровідного зв’язку, який містить:контролер, щоб встановлювати часові інтервали, які використовуються для першої технології радіозв'язку з числа щонайменше двох технологій радіозв'язку, що використовуються системою безпровідного зв'язку, і формувати службову інформацію для множини потоків, що підлягають посиланню у часових...
Спосіб і пристрій прийому та передачі сигнальної інформації у системі безпровідного зв`язку (варіанти)
Номер патенту: 89611
Опубліковано: 25.02.2010
Автори: Говард Стівен Дж., Уолтон Дж. Родні, Уоллейс Марк С., Кетчум Джон У.
МПК: H04L 12/28
Мітки: варіанти, системі, пристрій, прийому, сигнальної, спосіб, інформації, зв'язку, безпровідного, передачі
Формула / Реферат:
1. Спосіб передачі сигнальної інформації у системі безпровідного зв'язку, що включає в себе: передачу сигнальної інформації для першого набору з щонайменше одного користувальницького термінала з першою швидкістю передачі по першому підканалу прямого каналу керування і передачу сигнальної інформації для другого набору з щонайменше одного користувальницького термінала з другою швидкістю передачі по другому підканалу прямого...
Пристрій для поліпшення передачі обслуговування між секторами і/або між стільниками в системі безпровідного зв’язку з декількома несучими (варіанти)
Номер патенту: 91498
Опубліковано: 10.08.2010
Автори: Лароя Раджив, Лейн Френк А.
МПК: H04B 1/38
Мітки: поліпшення, обслуговування, стільниками, передачі, безпровідного, секторами, зв'язку, несучими, варіанти, пристрій, системі, декількома
Формула / Реферат:
1. Пристрій для керування передавальним пристроєм базової станції, що містить:процесор, виконаний з можливістю:і) передавати у першій смузі частот протягом першого періоду часу, протягом якого згаданий передавальний пристрій базової станції не передає в другій смузі частот; ііі) передавати у другій смузі частот протягом другого періоду часу, який коротший, ніж згаданий перший період часу, при цьому згаданий передавальний...