Спосіб і пристрій для вимірювання електричних струмів за допомогою перетворювача струму












Формула / Реферат
1. Спосіб вимірювання електричних струмів за допомогою перетворювача струму, в якому
- в ланцюгу (4) вторинного струму перетворювача струму омічний опір (Rcu) вторинної котушки (3) компенсують за допомогою активного двополюсника (5), який утворює негативний омічний опір (Rz), для підтримки постійної складової струму вторинного струму (Is), індукованого первинним струмом у вторинній котушці,
причому величина негативного опору активного двополюсника (5) відповідає омічному опору (Rcu) вторинної котушки (3) і
причому вимірюють вторинний струм (Is) перетворювача струму для реєстрації відповідного змішаному струму первинних провідників вторинного постійного струму і/або протидіючого струму,
- для створення певного магнітного потоку в осерді перетворювача через магнітну котушку в осердя перетворювача вводять попередньо визначену послідовність імпульсів, причому
осердя перетворювача намагнічують до потоку (Фs) насичення шляхом прикладання першого імпульсу напруги або струму до котушки перетворювача і
потім за допомогою прикладання другого імпульсу напруги зворотної полярності і певної площі (1) напруга-час магнітний потік знову зменшують.
2. Спосіб за п. 1, в якомуплощу (1) "напруга-час" другого імпульсу напруги вибирають так, що після другого імпульсу напруги певний третій імпульс напруги прикладають з полярністю, протилежною другому імпульсу напруги, так, що в перетворювачі досягається робоча точка, в якій при струмі намагнічування, малому відносно струму насичення, диференціальна індуктивність перетворювача є якомога більшою.
3. Спосіб за п. 1 або 2, в якому струм намагнічування, який відповідає створеному певному магнітному потоку у вторинній котушці (3), визначають за рахунок того, що генерують змінний струм намагнічування, послідовність імпульсів прикладають із заданою частотою навперемінно, з відповідно зворотним знаком, для обох полярностей насичення.
4. Спосіб за п. 3, в якому формують цикли вимірювання з часом (tz) циклу, який має в кожному періоді часовий інтервал з часом (te) розмагнічування і часовий інтервал з часом (tm) вимірювання.
5. Спосіб за п. 3 або 4, в якому визначають амплітуду виникаючого змінного струму намагнічування і генерують сигнал корекції, який відповідає ходу і амплітуді прямокутного змінного струму намагнічування, і виміряний сигнал відповідно коректують на певний сигнал корекції.
6. Спосіб за будь-яким з попередніх пунктів, в якому виміряний сигнал для подальшої обробки регулюють так, що всі часові інтервали (te) у виміряному сигналі, які відповідають часовому інтервалу імпульсу напруги попередньо визначеної послідовності імпульсів однієї полярності, забезпечуються попередньо визначеним сталим значенням, зокрема нульовим значенням.
7. Спосіб за п. 6, в якому відрегульований виміряний сигнал, крім того, множать на віконну функцію, зокрема на синусоїдальний сигнал, який має частоту циклу і синхронний з циклом.
8. Спосіб за будь-яким з попередніх пунктів, в якому величину генерованого негативного омічного опору (Rz) регулюють на основі певної неповної компенсації або перекомпенсації омічного опору (Rcu) вторинної котушки (3).
9. Спосіб за п. 8, в якому визначають неповну компенсацію або перекомпенсацію омічного опору (Rcu) вторинної котушки (3), при цьому з виміряного сигналу визначають амплітуду гармоніки, яка виникає при відхиленні змінного струму намагнічування від прямокутної форми сигналу.
10. Спосіб за будь-яким з попередніх пунктів, в якому визначають і потім компенсують напругу зміщення, виникаючу у вторинному ланцюгу, зокрема, через застосовувані електронні компоненти.
11. Спосіб за п. 10, в якому значення напруги зміщення визначають за допомогою кореляції за рахунок того, що з виміряного сигналу визначають амплітуду гармоніки, за допомогою якої простий сигнал (Iz) пилкоподібної форми відрізняється від сигналу (Id) подвійної пилкоподібної форми або прямокутного сигналу.
12. Спосіб за будь-яким з попередніх пунктів, що застосовується для вимірювання диференціальних струмів або струмів несправності в електричному пристрої, які, нарівні зі змінною складовою, також містять сталу складову струму.
13. Спосіб за будь-яким з попередніх пунктів, в якому магнітна котушка для видачі попередньо заданої послідовності імпульсів в осердя перетворювача є вторинною котушкою (3) перетворювача.
14. Пристрій для вимірювання електричних струмів, який містить щонайменше один перетворювач струму і виконаний з можливістю здійснення способу вимірювання за будь-яким з пп. 1-13.
15. Пристрій за п. 14, причому пристрій містить щонайменше одне кероване джерело (25) напруги і щонайменше один засіб виявлення (10) струму, які з'єднані з засобом керування.
16. Пристрій за п. 15, який містить активний двополюсник (5), який через перший регулятор з'єднаний з засобом виявлення (10) струму так, що утворюється ланцюг регулювання для певних частотних складових виміряного сигналу, згенерованого за допомогою засобу виявлення (10) струму.
17. Пристрій за п. 15 або 16, який додатково містить другий регулятор (6) для узгодження негативного опору (Rz) двополюсника з температурно-залежним омічним опором котушки.
18. Пристрій за п. 17, в якому другий регулятор виконаний з можливістю підстроювання негативного опору (Rz) двополюсника через коефіцієнти Фур'є і за допомогою компенсації небажаних частотних складових виміряного сигналу.
19. Пристрій за будь-яким з пп. 15-18, в якому засіб керування реалізований мікроконтролером.
20. Система для вимірювання електричних струмів, що містить індуктивний перетворювач струму і пристрій згідно з будь-яким з пп. 15-19.
21. Спосіб вимірювання електричних струмів за допомогою перетворювача струму, що включає в себе наступні етапи:
розширення схеми вторинного ланцюга (4) перетворювача струму електричним пристроєм, так що утворюючий негативний омічний опір (Rz) активний двополюсник (5) і засіб виявлення (10) струму у вторинному ланцюзі (4) перетворювача з'єднані послідовно, і джерело (25) напруги включене послідовно в ланцюг струму вторинної котушки (3) перетворювача, і блок керування з'єднаний з засобом виявлення (10) струму і джерелом (25) напруги;
зчитування засобу виявлення (10) струму і керування джерелом (25) напруги за допомогою блока керування для виконання способу за будь-яким з пп. 1-13; і
видача вихідного сигналу від блока керування, який містить складову постійного струму і складову змінного струму електричного первинного струму перетворювача.
Текст
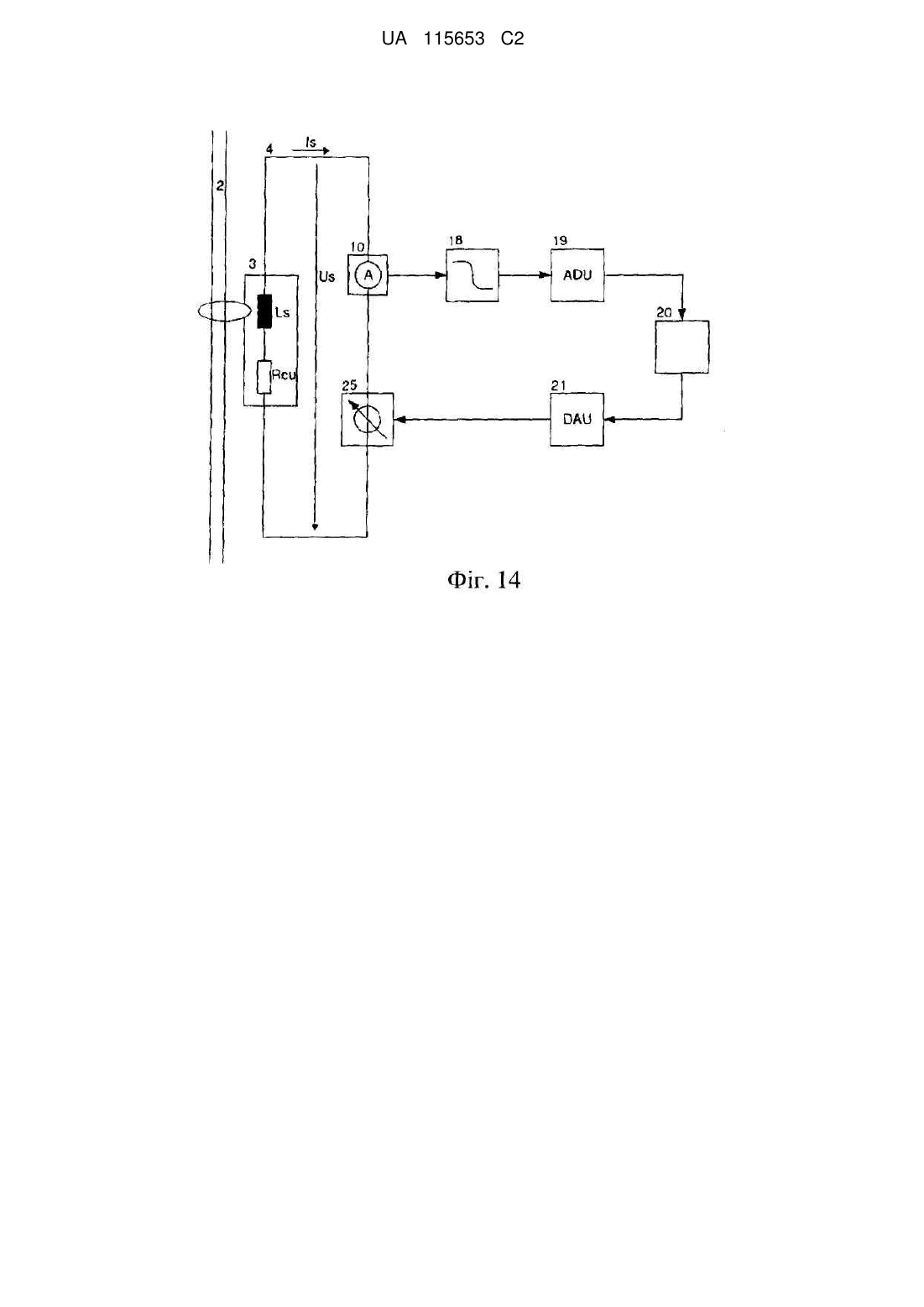
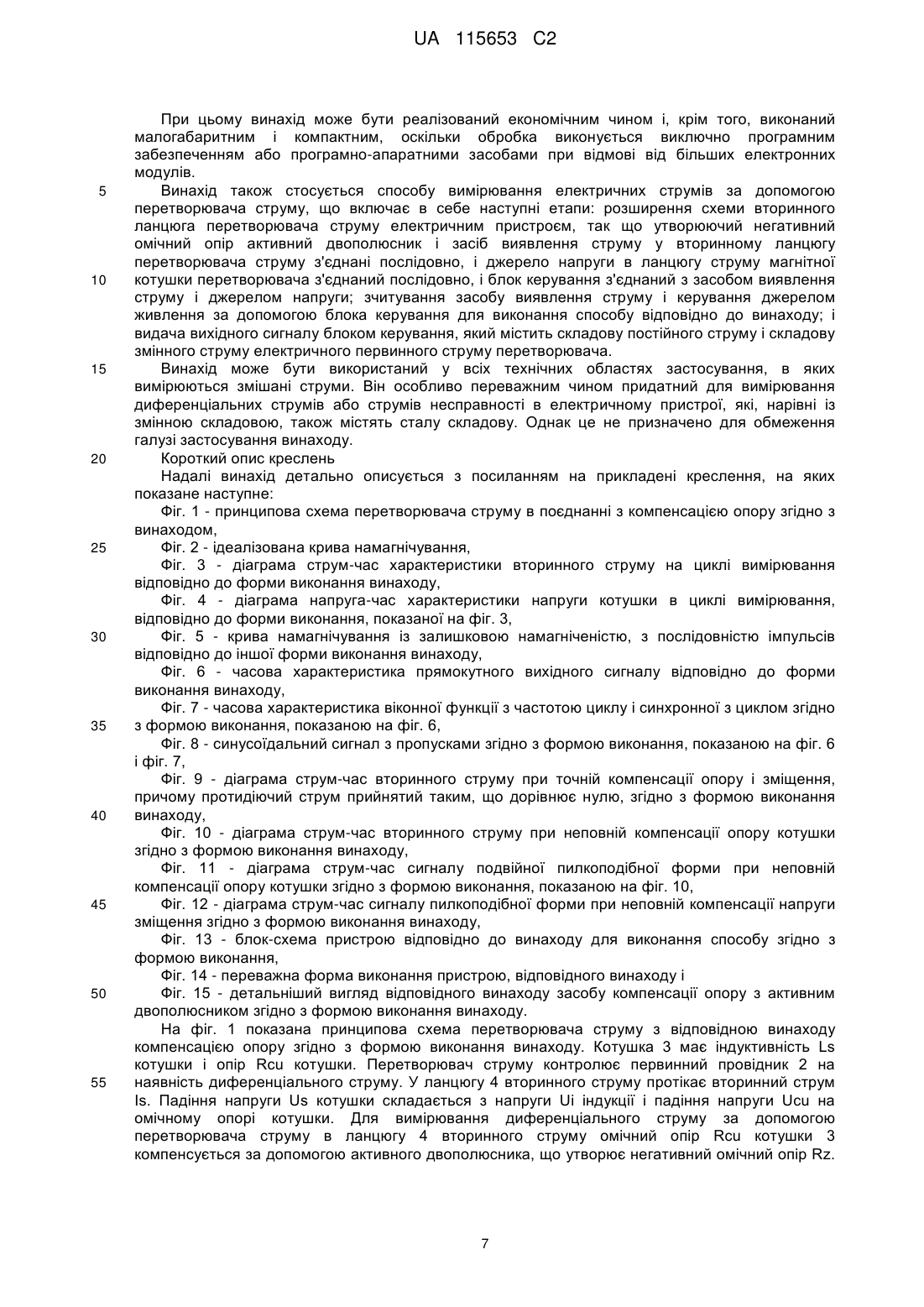
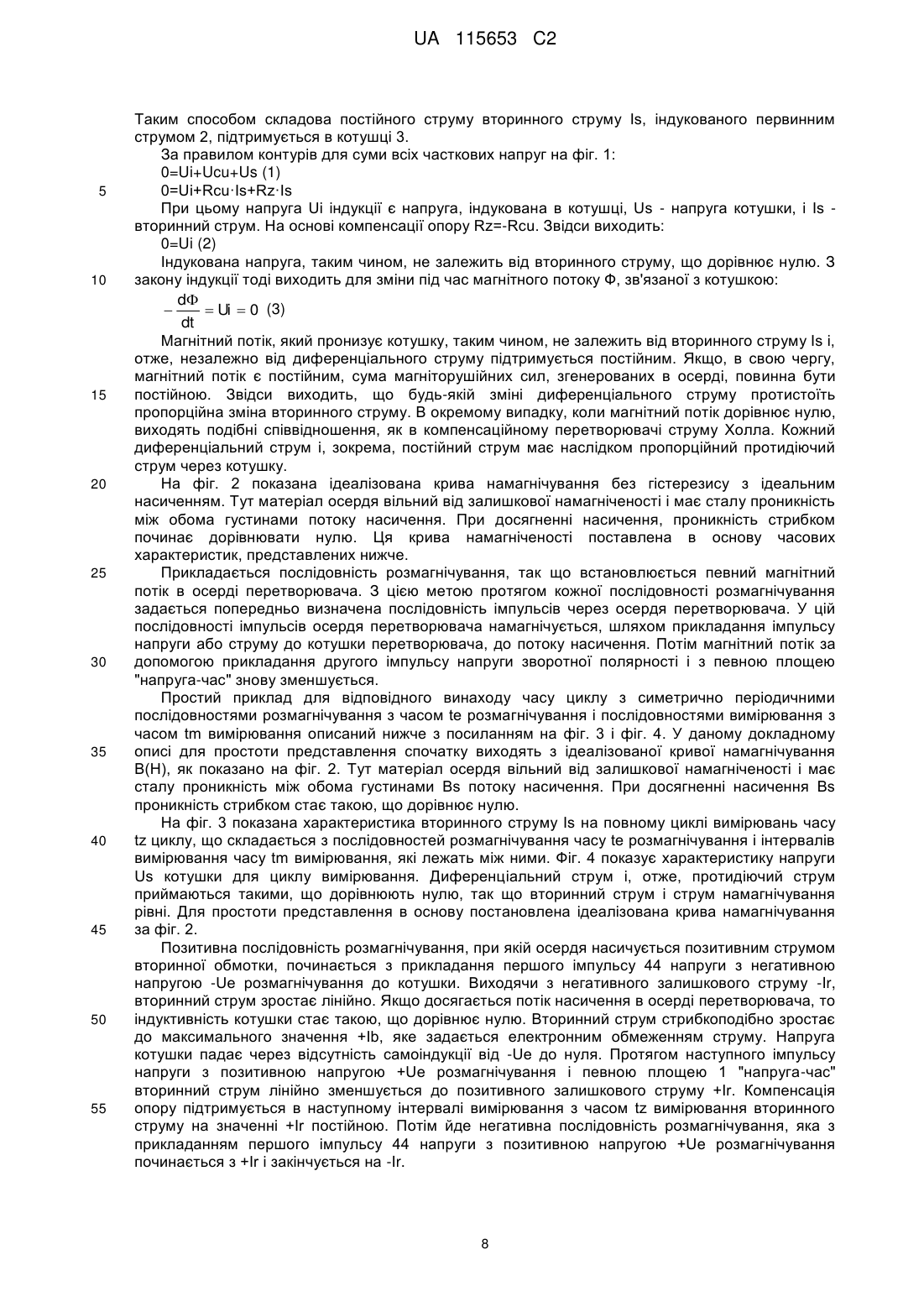
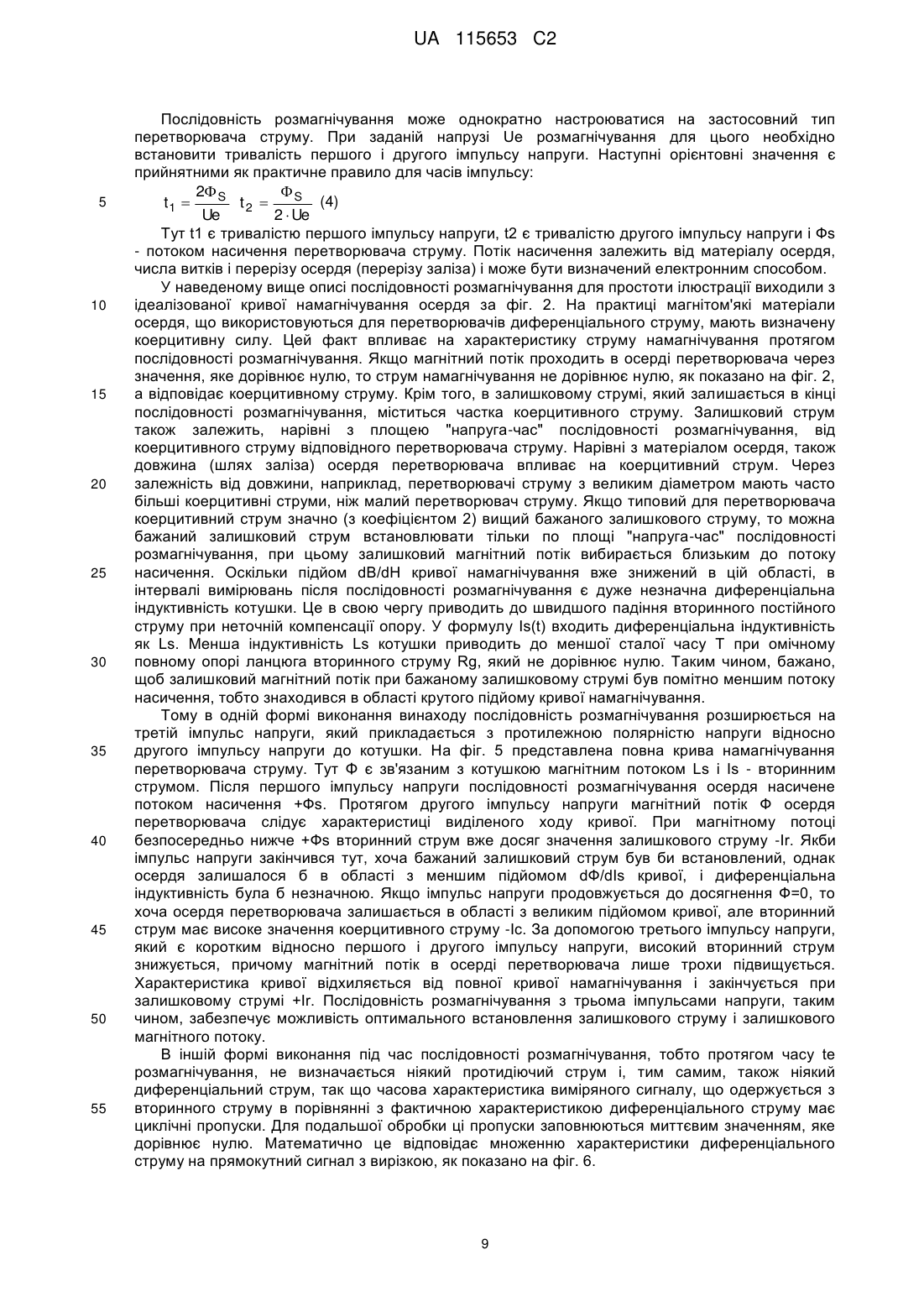
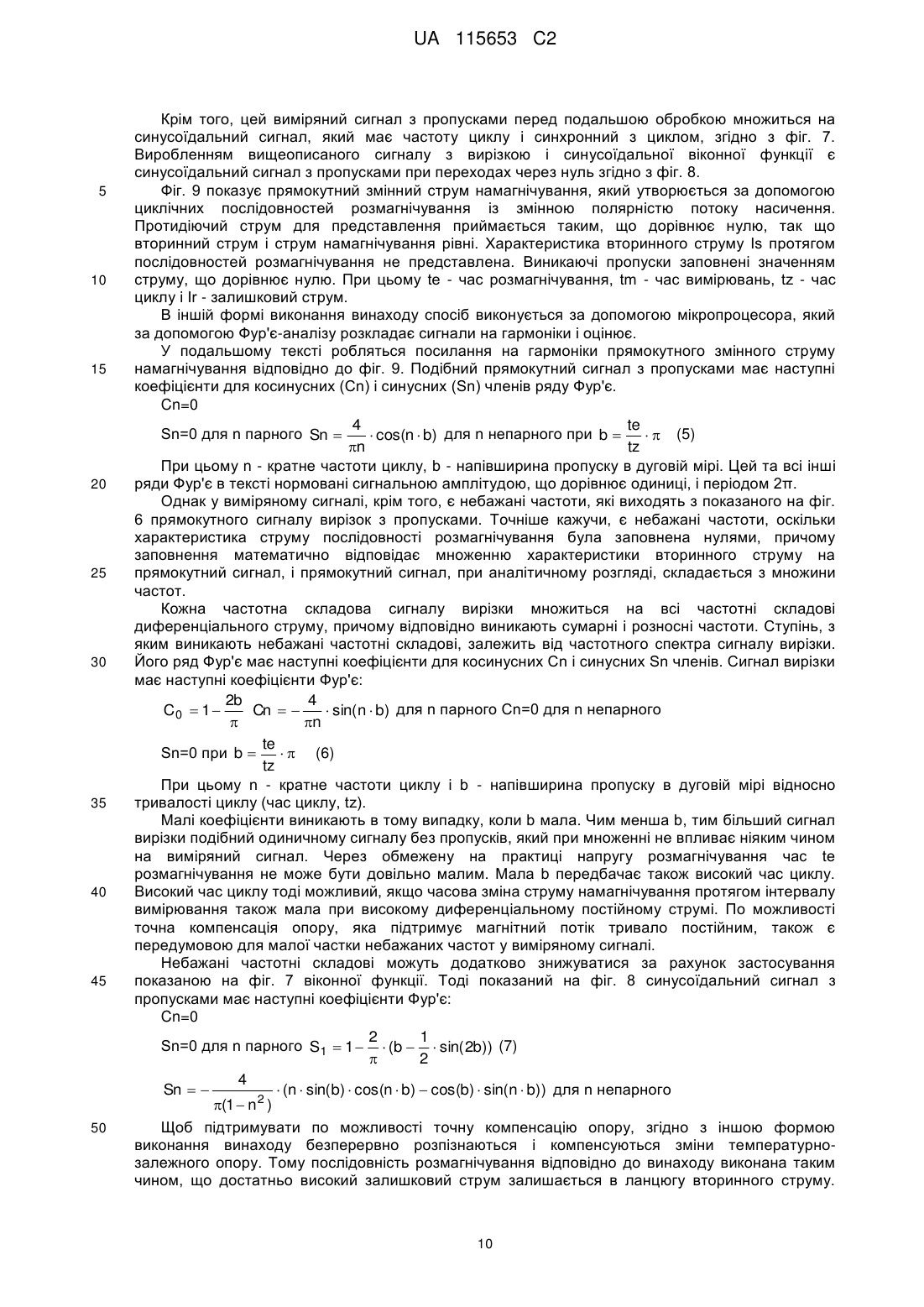
Реферат: Спосіб і пристрій для вимірювання електричних диференціальних струмів, які, нарівні зі складовою змінного струму, також містять складову постійного струму, за допомогою індукційного перетворювача диференціального струму. Відомі способи для вимірювання змішаних диференціальних струмів вимагають спеціальних конструкцій перетворювача струму відносно обмотки котушки і матеріалу магнітного осердя і числа осердь. Новий спосіб виходить з тих же перетворювачів струму, які звичайно застосовуються для вимірювання чисто диференціальних змінних струмів. Відповідно до винаходу для цього вторинна котушка (3) перетворювача струму керується таким чином, що зчеплений з вторинною котушкою (3) магнітний потік (Ф) в осерді залишається сталим незалежно від диференціального струму, і необхідний для цього вторинний струм (Is) вимірюється. Для цього, з одного боку, омічний опір (Rcu) вторинної котушки (3) кола (4) вторинного струму за допомогою сформованого електронним способом негативного опору (Rz) компенсується, і, з іншого боку, певний магнітний потік циклічно відновлюється, при цьому потік насичення (Фs) осердя використовується як опорна точка. UA 115653 C2 (12) UA 115653 C2 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 60 Галузь техніки Винахід стосується способу і пристрою для вимірювання електричних струмів за допомогою перетворювача струму. Зокрема, винахід стосується способу і пристрою для вимірювання електричних диференціальних струмів, які, нарівні зі складовою змінного струму, також містять складову постійного струму і, отже, є змішаними струмами. Попередній рівень техніки Вимірювання диференціальних струмів і/або струмів несправності є важливою вимогою в галузі техніки безпеки промислового обладнання і електричних пристроїв, зокрема, для захисту людей від ураження електричним струмом, а також для захисту машин, промислового обладнання і електричних пристроїв від збоїв і пошкоджень в результаті небажаних або викликаних несправностями протікань струму. Прикладом можливого виникнення таких небажаних протікань струму є так звані замикання на землю. При замиканні на землю, електричний провідник має ненавмисне електропровідне з'єднання з потенціалом землі, тобто між провідником і потенціалом землі існує низький електричний опір. Через цей опір протікає електричний струм, струм несправності або диференціальний струм. Це становить перешкоду і серйозну загрозу при перевищенні граничних значень під час роботи електричного пристрою. Для запобігання такій загрозі визначається присутність і величина диференціальних струмів або струмів несправності всередині пристрою. У випадку струму несправності проводиться відмінність між гладким постійним струмом несправності і пульсуючим постійним струмом несправності, а також змінним струмом несправності. Для реєстрації змінного струму несправності знаходять застосування індукційні перетворювачі струму або підсумовуючі перетворювачі. Індукційний перетворювач струму або підсумовуючий перетворювач звичайно має феромагнітне осердя перетворювача, на якому як вторинна обмотка розташована котушка перетворювача, наприклад мідний провід з покриттям. Для реєстрації, наприклад, диференціального струму, підвідний провід і зворотний провід відповідних ланцюгів струму електричного пристрою в пучку і спільно паралельно проводяться через перетворювач струму. Електричний підвідний провід і зворотний провід утворюють разом первинну обмотку перетворювача струму, причому первинна обмотка не обов'язково повинна багато разів або однократно обмотувати феромагнітне осердя перетворювача, але звичайно може складатися тільки з провідників, безпосередньо протягнених через середину осердя перетворювача. При цьому у випадку просто протягнених провідників, точніше сказати, мова йде точно про один виток, який в загальному випадку замикається на великому віддаленні від осердя перетворювача. При правильному функціонуванні електричного пристрою, тобто при достатньо великому електричному опорі між електричними проводами і потенціалом землі, суми струмів в протягнених через перетворювач струму електричному підвідному проводі і зворотному проводі взаємно знищуються, і тому перетворювач струму не видає ніякого сигналу. Однак при наявності небажаного протікання струму всередині електричного пристрою вимірюється кінцевий диференціальний струм. Індукційні перетворювачі струму як трансформатори чутливі тільки до електричних змінних струмів, причому без додаткових заходів, постійний струм не забезпечує придатний сигнал. Оскільки, однак, в основному, на практиці, вимірювання сталої складової диференціального струму представляє інтерес, наприклад, в зв'язку з підвищеною небезпекою постійного струму для людей, були запропоновані різні пристрої з перетворювачами струму, які здатні вимірювати, нарівні із змінною складовою, також сталу складову струму диференціальних струмів. З DE 102005028881 B4 відомий аналізатор струму несправності для виявлення струмів несправності і пристрій з індукційними перетворювачами сумарного струму для виявлення змінного струму несправності і пульсуючого постійного струму, в якому за допомогою фільтрації і розділення виявленого сигналу диференціального струму на низькочастотні і високочастотні часткові сигнали і їх аналізу можна виявити струми несправності, які звичайно не можуть бути виявлені подібними індукційними перетворювачами сумарного струму. Крім того, запропоноване калібрування аналізатора струму несправності за допомогою введення цілеспрямовано регульованого відомого струму несправності через додаткову обмотку на перетворювачі сумарного струму. Однак при цьому не вимірюється гладкий постійний струм. З DE 102 37 342 А1 відомий спосіб і пристрій для контролю струму несправності в мережах змінного струму, при якому за допомогою датчиків струму виявляються струми, які перетворюються в цифрову форму, і потім обчислюється сумарний струм. Залежно від фазового положення відносно напруги, здійснюється розділення сумарного струму на активну і реактивну складові струму, так що можливе частотно-залежне зважування сумарних струмів, які відповідають змінному струму несправності. Постійні струми несправності можуть бути виявлені 1 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 60 тільки при використанні датчиків струму, здатних працювати при постійному струмі. Для виявлення відносно малого диференціального струму, наприклад, 10 А+(- 9,99 А)=10 мА, щоб зробити в принципі можливою практичну реалізацію, потрібні дуже точні і дорогі датчики струму. Крім того, для вимірювання змішаних струмів і особливо гладких постійних струмів несправності за допомогою індукційних перетворювачів струму відомі способи, які використовують нелінійність між густиною В магнітного потоку і напругою поля Н відповідно до кривої гістерезису або намагнічування В(Н) феромагнітного осердя перетворювача. Конкретніше, використовується той факт, що осердя перетворювача при збільшенні потоку через первинний провідник, тобто збільшенні магніторушійної сили, досягає насичення, результатом чого є більш плоский характер наростання кривої намагнічування В(Н) для високих первинних струмів і, таким чином, залежність проникності струму, який протікає через первинний провідник. При цьому шляхом вимірювань миттєве значення існуючого диференціального струму визначає, яка точка береться на кривій намагнічування осердя перетворювача, причому підйом dB/dH для точки, взятої на кривій намагнічування, визначає диференціальну індуктивність котушки у вторинному ланцюгу струму перетворювача струму, який потім вимірюється придатними схемами. У DE 19943802 або EP 1212821 використовується принцип керованої індуктивності. При цьому зміни в індуктивності котушки розпізнаються на основі розладу резонансного контуру. У DE19943802 використовується принцип схеми трансдуктора (магнітного регулятора), причому диференціальний струм діє як керуючий струм трансдуктора. При виникненні постійного струму несправності намагніченість залізного осердя зміщується, за рахунок чого змінюється індуктивність котушки. При цьому зміни в індуктивності котушки розпізнаються на основі розладу резонансного контуру. Інші приклади застосування принципу керованої індуктивності описані в DE3642393 А1 і DE3543985 A1. Крім того, відоме застосування котушки як компонента ланцюга, що визначає частоту зворотного зв'язку, в мультивібраторі. Він прикладає до котушки прямокутну змінну напругу таким чином, що феромагнітне осердя перетворювача завжди коливається між двома магнітними потоками насичення туди і назад. При цьому через котушку протікає струм намагнічування. При відповідній формі кривої намагнічування матеріалу осердя перетворювача в такому пристрої може бути досягнуте те, що область магнітного потоку, що проходить через осердя перетворювача, майже не залежить від миттєвого значення диференціального струму. Звідси виходить, що кожна магніторушійна сила, що генерується диференціальним струмом через осердя перетворювача, компенсується протидіючою магніторушійною силою, що утворюється котушкою. На струм намагнічування мультивібратор накладається, таким чином, на протидіючий струм, пропорційний диференціальному струму, який потім вимірюється придатними схемами. У DE19826410 A1 представлена принципова схема датчика диференціального струму, чутливого до постійного і змінного струму, при цьому мультивібратор реалізований з двома котушками. У EP1267467 A2 описаний модулюючий коливальний контур, який являє собою мультивібратор з котушкою. Тут за рахунок опору в ланцюгу струму намагнічування досягається те, що протидіючий струм впливає на відношення ширини імпульсу генерованої прямокутної змінної напруги. При цьому в EP1267467 A2 розкрито, що в описаних способах за рахунок високочастотних складових диференціального струму може статися порушення теореми відліків Шенона. Згідно з цим рішенням, пропонується компенсувати магніторушійну силу, що генерується високочастотними складовими диференціального струму в осерді перетворювача, наприклад, мультивібратор, протилежно спрямованою магніторушійною силою. При цьому протилежно спрямована магніторушійна сила генерується додатково використовуваною котушкою, яка з'єднана з іншим, індукційно працюючим перетворювачем струму через фільтр верхніх частот. За допомогою цієї міри можна уникнути ефектів накладання спектрів в мультивібратор між високочастотними складовими диференціального струму і частотою мультивібратора. З DE 3 534 985 A1 і DE 3 543 948 В1 відомий захисний перемикач струму несправності для виявлення постійного і змінного струму, що складається з двох перетворювачів сумарного струму. При цьому один перетворювач сумарного струму перетворює імпульсні і змінні струми, а другий перетворювач сумарного струму виявляє постійний струм. З DE 29705030 відомий захисний перемикач струму несправності для виявлення постійного і змінного струму з перетворювачем сумарного струму. При цьому перетворювач сумарного струму виконаний з двома окремими схемами оцінки для імпульсного або змінного струму і постійного струму, причому вони приводяться в дію за допомогою датчиків тактових імпульсів 2 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 60 або фільтрів. Перетворювач струму для цього приводиться в дію або навперемінно через часові такти зі схемами оцінки, або з'єднується одночасно через фільтри з обома схемами оцінки. Недоліком відомих рішень з індукційними перетворювачами струму є те, що виявлення постійного струму несправності здійснюється непрямим чином, через оцінку складової змінного струму, при цьому визначаються зміни індуктивності. Це приводить до ускладнення оцінки і схемних з'єднань. Крім того, повинні задовольнятися підвищені вимоги відносно обмотки котушки і матеріалу осердя. Крім того, витрати на монтаж для описаних перетворювачів струму для виявлення змішаних струмів часто вищі, ніж для виявлення змінних струмів. У деяких формах виконання частина вимірювальної електроніки розміщується в корпусі перетворювача, що вимагає електроживлення. Інші форми виконання працюють з двома котушками на осерді перетворювача і вимагає чотирипровідного виводу. Загалом, все це обмежує можливість переоснащення вже існуючих або вже вбудованих в електричне обладнання перетворювачів струму, призначених для виявлення змінного струму, на виявлення змішаного потоку. Крім того, вимірювання змішаних струмів в діапазоні ампер може бути реалізоване, як альтернатива, також за допомогою елементів Холла, причому в таких перетворювачах струму Холла елемент Холла розташований в повітряному зазорі феромагнітного залізного осердя. Потік в первинному провіднику, що охоплюється осердям, приводить до магнітного потоку через елемент Холла і оцінюваною напругою Холла. Часто перетворювачі струму Холла працюють відповідно до принципу компенсації. Для цього на осердя перетворювача встановлюється котушка. Вона керується зв'язаною з елементом Холла схемою регулювання таким чином, що магнітний потік через елемент Холла завжди дорівнює нулю. Будь-яка магніторушійна сила, що генерується охоплюваним первинним провідником, компенсується протидіючою магніторушійною силою. Необхідний для цього протидіючий струм через котушку пропорційний струму первинного провідника і є вихідним сигналом такого перетворювача. Для вимірювання диференціальних струмів, які можуть бути в діапазоні 10 мА, перетворювачі струму Холла, однак, не підходять. Постановка задачі В основі винаходу лежить задача створити придатний для змішаних струмів спосіб вимірювання і відповідний вимірювальний пристрій, який працює з тими ж перетворювачами струму, які звичайно використовуються для вимірювання змінних струмів несправності. Розкриття винаходу Відповідно до винаходу надані спосіб і відповідний йому пристрій для вимірювання струмів відповідно до незалежних пунктів формули винаходу. Реалізована ідея, яка лежить в основі винаходу, переважним чином може убачатися в тому, щоб принцип компенсації, що застосовується в перетворювачах струму Холла, перенести на індукційні перетворювачі струму. Тому автоматично магнітний потік, тобто магнітний потік, який зв'язаний з котушкою в осерді перетворювача, незалежно від виникаючого диференціального струму, підтримується постійним і вимірюється еквівалентний цьому протидіючий струм через котушку. Це дозволяє визначати складову постійного і змінного струму диференціального струму на основі вторинного постійного струму. У способі згідно з винаходом у вторинному ланцюгу струму перетворювача струму омічний опір котушки компенсується за допомогою керованого активного двополюсника, який утворює негативний омічний опір, так що складова постійного струму вторинного струму, індукованого первинним струмом у вторинній обмотці, підтримується. Крім того, для створення певного магнітного потоку в осерді трансформатора через котушку вводиться попередньо визначена послідовність імпульсів, причому осердя перетворювача намагнічується до потоку насичення шляхом прикладання першого імпульсу напруги або струму в котушці перетворювача. Потім, за допомогою прикладання наступного імпульсу напруги зворотної полярності і з певною площею "напруга-час" магнітний потік знов зменшується. Також створений пристрій для вимірювання електричних струмів, який виконаний з можливістю зв'язування з вторинними виводами котушки перетворювача струму і, в з'єднанні з перетворювачем струму, виконаний з можливістю здійснення способу, відповідного винаходу. Крім того, надана система для вимірювання електричних струмів, що має перетворювач струму і пристрій відповідно до винаходу. Образно кажучи, згідно з принципом винаходу, за допомогою електронної схеми утворюється активний двополюсник, який відносно напруги і струму демонструє поведінку негативного омічного опору, причому цей двополюсник з'єднаний з котушкою і розрахований таким чином і справляється за допомогою виміряного сигналу так, що величина його негативного опору відповідає омічному опору Rcu котушки. Тим самим омічний повний опір Rg 3 UA 115653 C2 5 ланцюга вторинного струму з послідовного з'єднання котушки і двополюсника починає дорівнювати нулю. За допомогою цієї компенсації опору, котушка діє на осерді майже як ідеальний провідник і протидіє будь-якій часовій зміні зчепленого з нею магнітного потоку. Ефект винаходу може бути обговорений на основі формули, яка представляє часовий хід постійного струму в ланцюгу струму з індуктивності й омічного опору. Для ланцюга вторинного струму формула має наступний вигляд: 10 15 20 25 30 35 40 45 50 55 t T t при Is (t ) Is 0 e T і Rg Rcu Rz (1) Is (t ) Is 0 e При цьому Is0 позначає вихідне значення вторинного постійного струму, Ls - індуктивність котушки, Rcu - омічний опір вторинної котушки, Rz - негативний опір двополюсника і Т - сталу часу ланцюга струму. За рахунок відповідної винаходу компенсації опору омічний повний опір Rg вторинного ланцюга струму наближується до нуля, і, отже, стала часу Т - до нескінченності, так що експонентна функція при кінцевому великому часі Т зберігає значення 1. Оскільки індуктивність є частиною трансформатора і тому існує індукційний зв'язок з первинними провідниками, що охоплюються осердям перетворювача, вихідне значення вторинного постійного струму Is0 являє собою перетворений диференціальний струм. Якщо, таким чином, спочатку Is=0, а потім починає протікати диференціальний постійний струм, то виникає вторинний постійний струм, який не зменшується через нескінченну сталу часу. За допомогою описаної відповідної винаходу компенсації опору переважним чином може бути надійно гарантовано, що з виміряного струму вторинної обмотки перетворювача струму може бути визначена коректна величина фактичного, відповідного змішаному струму первинних провідників, вторинного постійного струму або протидіючого струму. Це, зокрема, досягається за допомогою відповідної винаходу послідовності імпульсів напруги, яка вводиться через котушку під час періодичних пауз вимірювання. За допомогою послідовності імпульсів утворюється певний магнітний потік в осерді перетворювача, при цьому спочатку до котушки прикладається стала напруга в формі імпульсу напруги доти, доки осердя перетворювача не досягне надійним чином свого магнітного потоку насичення або потоку насичення, за допомогою чого потім в розпорядження представляється опорна точка, оскільки в насиченні крива намагнічування матеріалу осердя проходить дуже плоско (низьке dB/dH), і потік насичення, таким чином, практично не залежить від диференціального і вторинного струму. Відповідно до винаходу потім, виходячи з цієї опорної точки, включаючи незначну часову затримку, з прикладанням імпульсу напруги зворотної полярності і певної площі "напруга-час" утворюється певний магнітний потік, в результаті чого забезпечується залишковий магнітний потік. Тому відповідний винаходу спосіб стає незалежним від вихідного моменту часу і, тим самим, застосовним на практиці, оскільки компенсація опору повинна активуватися в деякий момент часу, в який диференціальний струм вже може протікати, наприклад, в момент часу запуску пристрою, відповідного винаходу. Починаючи з цього моменту часу, при одному тільки застосуванні компенсації опору магнітний потік в осерді перетворювача хоча і залишався б постійним, але був би невідомим. Точніше кажучи, вторинний струм в подальшому його ході зміни не обов'язково точно відповідав би цікавлячому протидіючому струму, який генерує протидіючу магніторушійну силу відносно диференціального струму. Навпаки, вторинний струм є сумою з протидіючого струму і постійного струму намагнічування, який підтримує існуючий магнітний потік відносно магнітного опору осердя. Відповідно до винаходу цей постійний струм намагнічування асоційований із залишковим магнітним потоком, тобто визначено створеним магнітним потоком, і позначається далі як залишковий струм. При цьому винахід придатний для вимірювання змішаних струмів з високою силою струму, а також в діапазоні, наприклад, менше 10 мА. Фахівцеві в даній галузі техніки буде зрозуміло, що винахід переважно застосовний до великої кількості різних перетворювачів. Зокрема, винахід застосовний до стандартних перетворювачів для вимірювання диференціального струму, які звичайно мають осердя з проникністю магнітом'якого матеріалу, що має високу і вторинну котушку з числом витків від 500 до 1000 з двопровідним виводом. Вони пропонуються багатьма виробниками в різних формах, так що в розпорядження наданий великий асортимент. В енергоустаткуванні часто вже є пристрої для контролю змінних струмів несправності, які могли б бути розширені при збереженні стандартних перетворювачів при невеликих витратах для контролю і реєстрації змішаних струмів. Таким чином, винахід приводить до зниження витрат і в кінцевому результаті забезпечує можливість широкого використання контролю мереж з технічно зумовленою зростаючою часткою змішаних струмів. Переважні варіанти здійснення винаходу будуть очевидні з опису і прикладених залежних пунктів формули винаходу. 4 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 Відповідно до варіанта здійснення винаходу, площа напруга-час наступного імпульсу напруги вибирається так, щоб і після цього імпульсу напруга визначений третій імпульс напруги прикладався з полярністю, протилежною згаданому наступному імпульсу напруги, так що в перетворювачі досягається робоча точка, при якій при струмі намагнічування, малому відносно струму насичення, диференціальна індуктивність перетворювача максимально велика. Таким чином, реалізовується послідовність розмагнічування, за допомогою якої на основі трьох спеціальних імпульсів напруга досягається оптимальна установка залишкового струму і залишкового магнітного потоку. У результаті, чутливість вимірювань може бути збільшена. Згідно з варіантом здійснення винаходу, струм намагнічування, який відповідає створеному певному магнітному потоку в котушці, визначається таким чином, що послідовність імпульсів прикладається із заданою частотою навперемінно, з відповідно зворотним знаком, для обох полярностей насичення. Потім визначається амплітуда виникаючого прямокутного змінного струму намагнічування. Таким чином, спосіб багато разів застосовується вигідним чином, і точність вимірювання може бути збільшена. Цьому також сприяє те, що на основі частоти, що застосовується, виходять певні довжини інтервалів. Крім того, виходять дані з використанням як позитивної, так і негативної полярності, що додатково підвищує загальну досяжну точність. Періодичні цикли вимірювання переважно виконані з часом циклу, який має в кожному періоді часовий інтервал з часом розмагнічування і часовий інтервал з часом вимірювання. Відповідно до переважного варіанта здійснення даного винаходу, визначається виміряний сигнал, який береться по вибору з характеристики електричного струму, що протікає у вторинному ланцюгу перетворювача, або з падіння напруги у вторинному ланцюгу перетворювача. Тим самим може переважно надаватися подальша сигнальна інформація, яка, наприклад, аналізується на її часовий хід, що поліпшує результат вимірювання. Виміряний сигнал може, наприклад, визначатися або генеруватися за допомогою фільтра. Згідно з розвитком цієї переважної форми виконання, визначається амплітуда виникаючого прямокутного змінного струму намагнічування, і генерується сигнал корекції, який відповідає ходу і амплітуді прямокутного змінного струму намагнічування, і виміряний сигнал може відповідно коректуватися шляхом віднімання певного сигналу корекції. Тим самим сприятливим чином може досягатися те, що спосіб виконується значною мірою незалежно від розкидання параметрів компонентів, температурної залежності осердя перетворювача і т. д. Оскільки саме під час вимірювання струму залишковий струм визначається в явному вигляді, систематична помилка зменшується. В результаті цієї компенсації залишкового струму, в наявності залишається чистий протидіючий струм, який потім може використовуватися для формування ефективного значення або може подаватися на іншу обробку. У цьому подальшому розвитку буде використовуватися той факт, що якщо відповідна винаходу послідовність розмагнічування реалізовується почергово і циклічно з позитивним і негативним насиченням, на основі симетрії кривої намагнічування після обох послідовностей розмагнічування залишається той же залишковий струм, але з протилежним знаком. Точніше кажучи, у часовій характеристиці вторинного струму виявляється прямокутний змінний струм намагнічування з циклічною частотою fz, який накладається на протидіючий струм, що генерується диференціальним струмом. Його амплітуда може бути визначена, наприклад, простим чином за допомогою кореляції вторинного струму з синусоїдальним сигналом, який має частоту циклу і синхронним з циклом. Відповідно до форми виконання винаходу виміряний сигнал для подальшої обробки очищується так, що часові інтервали у виміряному сигналі, які відповідають часовому інтервалу попередньо визначеної послідовності імпульсів, забезпечуються попередньо визначеним постійним значенням, зокрема, нульовим значенням. У цій переважній формі виконання підвищується досяжна точність, оскільки ефекти, які зумовлені наказаним ходом імпульсів, але не сприяють вимірюванню цікавлячого протидіючого струму або швидше утворюють перешкоди, значною мірою видаляються. Очищений виміряний сигнал може множитися на віконну функцію, зокрема, на синусоїдальний сигнал, який має частоту циклу і синхронний з циклом. Таким чином, можна переважним чином зменшувати або уникати у виміряному сигналі крутих фронтів, і амплітуду вищих гармонік вищого порядку може бути зведена до малого значення, що при оцінці вимірювання змішаного струму звичайно приводить до сильного спрощення. 5 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 Згідно з іншим переважним подальшим розвитком, величина генерованого негативного омічного опору регулюється на основі певної неповної компенсації або перекомпенсації активного опору вторинної обмотки. Таким чином, навіть невеликі часові зміни в магнітному потоці, які можуть викликати, однак, у часі значне відхилення від струму намагнічування, присутнього при активації компенсації опору, розпізнаються і враховуються при обчисленні цікавлячого диференціального постійного струму. Надійність способу, отже, також збільшується, тому що навіть при неточно працюючій на практиці компенсації опору все одно досяжний постійний струм намагнічування. Переважно визначається неповна компенсація або перекомпенсація омічного опору вторинної обмотки, при цьому з виміряного сигналу визначається амплітуда гармоніки, яка виникає при відхиленні прямокутного змінного струму намагнічування від прямокутної форми. Таким чином, це особливо сприяє обробці і обчисленню результату вимірювання за допомогою процесора. Підлягаючий вимірюванню струм може тепер переважним чином визначатися з виміряного сигналу і певної неповної компенсації або перекомпенсації. Згідно з ще одним переважним варіантом виконання винаходу, визначається і потім компенсується напруга зміщення, яка виникає у вторинному контурі, зокрема, через застосовні електронні компоненти. Це дозволяє компенсувати температурну залежність і розкид параметрів електронних компонентів відповідного винаходу пристрою і допускає, і сприяє точній обробці. Таким чином, утворюється ланцюг вторинного струму з котушки і різних електронних схем, причому від цих схем потрібно, щоб вони могли точно обробляти сигнали постійного струму. Якщо вторинний струм протікає через двополюсник, то потрібно, що він утворював пропорційне вторинному струму падіння напруги, що, зокрема, означає, що падіння напруги дорівнює нулю, коли вторинний струм дорівнює нулю. Однак точна обробка постійного сигналу без відповідної компенсації часто приводить до труднощів на практиці, наприклад, через допуски або розкиди параметрів компонентів і температурних залежностей активних електронних компонентів. У випадку операційних підсилювачів, за допомогою яких переважно можуть бути реалізовані схеми вторинного струму, ця проблема виявляється в формі напруги зміщення. Ця напруга змінюється від примірника до примірника і залежить від температури. Напруга зміщення для операційних підсилювачів двополюсника приводить до того, що на пропорційний струм падіння напруги на двополюсникові накладається мала небажана стала напруга. Джерело напруги і виявлення струму по тій же причині приводять до небажаних напруг постійного струму в ланцюгу вторинного струму. Це тепер буде переважним чином компенсуватися відповідно до винаходу. Переважним чином, значення напруги зміщення визначається за допомогою кореляції, при цьому з виміряного сигналу визначається амплітуда гармоніки, яка не зустрічається ні в сигналі прямокутної форми, ні в сигналі подвійної пилкоподібної форми. Тим самим напруга зміщення може визначатися сприятливим чином, наприклад, за допомогою процесора. Відповідно до переважного варіанта здійснення, магнітна котушка для забезпечення попередньо заданої послідовності імпульсів через осердя перетворювача є вторинною котушкою перетворювача. Тим самим сприятливим чином може бути реалізоване вимірювання змішаного струму за допомогою тільки однієї котушки нарівні з провідником первинного струму. При цьому вторинна котушка використовується як для генерації послідовності імпульсів, так і для компенсації опору. Крім того, винахід стосується перетворювача з додатковими котушками. У ще одному варіанті здійснення використовується множина перетворювачів струму, кожний з однією або декількома обмотками, за рахунок чого переважно додатково може бути підвищена надмірність і надійність. Відповідно до винаходу може, наприклад, використовуватися інша обмотка і виводитися задана послідовність імпульсів, в той час як вторинна обмотка використовується для вимірювань. В одному варіанті здійснення винаходу, пристрій містить щонайменше одне кероване джерело живлення і щонайменше один засіб виявлення струму, які з'єднані з засобом керування. Крім того, пристрій переважно має регулятор для компенсації опору для регулювання негативного значення опору двополюсника залежно від температури. В особливо переважному варіанті здійснення засіб керування реалізований мікроконтролером. 6 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 При цьому винахід може бути реалізований економічним чином і, крім того, виконаний малогабаритним і компактним, оскільки обробка виконується виключно програмним забезпеченням або програмно-апаратними засобами при відмові від більших електронних модулів. Винахід також стосується способу вимірювання електричних струмів за допомогою перетворювача струму, що включає в себе наступні етапи: розширення схеми вторинного ланцюга перетворювача струму електричним пристроєм, так що утворюючий негативний омічний опір активний двополюсник і засіб виявлення струму у вторинному ланцюгу перетворювача струму з'єднані послідовно, і джерело напруги в ланцюгу струму магнітної котушки перетворювача з'єднаний послідовно, і блок керування з'єднаний з засобом виявлення струму і джерелом напруги; зчитування засобу виявлення струму і керування джерелом живлення за допомогою блока керування для виконання способу відповідно до винаходу; і видача вихідного сигналу блоком керування, який містить складову постійного струму і складову змінного струму електричного первинного струму перетворювача. Винахід може бути використаний у всіх технічних областях застосування, в яких вимірюються змішані струми. Він особливо переважним чином придатний для вимірювання диференціальних струмів або струмів несправності в електричному пристрої, які, нарівні із змінною складовою, також містять сталу складову. Однак це не призначено для обмеження галузі застосування винаходу. Короткий опис креслень Надалі винахід детально описується з посиланням на прикладені креслення, на яких показане наступне: Фіг. 1 - принципова схема перетворювача струму в поєднанні з компенсацією опору згідно з винаходом, Фіг. 2 - ідеалізована крива намагнічування, Фіг. 3 - діаграма струм-час характеристики вторинного струму на циклі вимірювання відповідно до форми виконання винаходу, Фіг. 4 - діаграма напруга-час характеристики напруги котушки в циклі вимірювання, відповідно до форми виконання, показаної на фіг. 3, Фіг. 5 - крива намагнічування із залишковою намагніченістю, з послідовністю імпульсів відповідно до іншої форми виконання винаходу, Фіг. 6 - часова характеристика прямокутного вихідного сигналу відповідно до форми виконання винаходу, Фіг. 7 - часова характеристика віконної функції з частотою циклу і синхронної з циклом згідно з формою виконання, показаною на фіг. 6, Фіг. 8 - синусоїдальний сигнал з пропусками згідно з формою виконання, показаною на фіг. 6 і фіг. 7, Фіг. 9 - діаграма струм-час вторинного струму при точній компенсації опору і зміщення, причому протидіючий струм прийнятий таким, що дорівнює нулю, згідно з формою виконання винаходу, Фіг. 10 - діаграма струм-час вторинного струму при неповній компенсації опору котушки згідно з формою виконання винаходу, Фіг. 11 - діаграма струм-час сигналу подвійної пилкоподібної форми при неповній компенсації опору котушки згідно з формою виконання, показаною на фіг. 10, Фіг. 12 - діаграма струм-час сигналу пилкоподібної форми при неповній компенсації напруги зміщення згідно з формою виконання винаходу, Фіг. 13 - блок-схема пристрою відповідно до винаходу для виконання способу згідно з формою виконання, Фіг. 14 - переважна форма виконання пристрою, відповідного винаходу і Фіг. 15 - детальніший вигляд відповідного винаходу засобу компенсації опору з активним двополюсником згідно з формою виконання винаходу. На фіг. 1 показана принципова схема перетворювача струму з відповідною винаходу компенсацією опору згідно з формою виконання винаходу. Котушка 3 має індуктивність Ls котушки і опір Rcu котушки. Перетворювач струму контролює первинний провідник 2 на наявність диференціального струму. У ланцюгу 4 вторинного струму протікає вторинний струм Is. Падіння напруги Us котушки складається з напруги Ui індукції і падіння напруги Ucu на омічному опорі котушки. Для вимірювання диференціального струму за допомогою перетворювача струму в ланцюгу 4 вторинного струму омічний опір Rcu котушки 3 компенсується за допомогою активного двополюсника, що утворює негативний омічний опір Rz. 7 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 Таким способом складова постійного струму вторинного струму Is, індукованого первинним струмом 2, підтримується в котушці 3. За правилом контурів для суми всіх часткових напруг на фіг. 1: 0=Ui+Ucu+Us (1) 0=Ui+Rcu·Is+Rz·Is При цьому напруга Ui індукції є напруга, індукована в котушці, Us - напруга котушки, і Is вторинний струм. На основі компенсації опору Rz=-Rcu. Звідси виходить: 0=Ui (2) Індукована напруга, таким чином, не залежить від вторинного струму, що дорівнює нулю. З закону індукції тоді виходить для зміни під час магнітного потоку Ф, зв'язаної з котушкою: d Ui 0 (3) dt Магнітний потік, який пронизує котушку, таким чином, не залежить від вторинного струму Is і, отже, незалежно від диференціального струму підтримується постійним. Якщо, в свою чергу, магнітний потік є постійним, сума магніторушійних сил, згенерованих в осерді, повинна бути постійною. Звідси виходить, що будь-якій зміні диференціального струму протистоїть пропорційна зміна вторинного струму. В окремому випадку, коли магнітний потік дорівнює нулю, виходять подібні співвідношення, як в компенсаційному перетворювачі струму Холла. Кожний диференціальний струм і, зокрема, постійний струм має наслідком пропорційний протидіючий струм через котушку. На фіг. 2 показана ідеалізована крива намагнічування без гістерезису з ідеальним насиченням. Тут матеріал осердя вільний від залишкової намагніченості і має сталу проникність між обома густинами потоку насичення. При досягненні насичення, проникність стрибком починає дорівнювати нулю. Ця крива намагніченості поставлена в основу часових характеристик, представлених нижче. Прикладається послідовність розмагнічування, так що встановлюється певний магнітний потік в осерді перетворювача. З цією метою протягом кожної послідовності розмагнічування задається попередньо визначена послідовність імпульсів через осердя перетворювача. У цій послідовності імпульсів осердя перетворювача намагнічується, шляхом прикладання імпульсу напруги або струму до котушки перетворювача, до потоку насичення. Потім магнітний потік за допомогою прикладання другого імпульсу напруги зворотної полярності і з певною площею "напруга-час" знову зменшується. Простий приклад для відповідного винаходу часу циклу з симетрично періодичними послідовностями розмагнічування з часом te розмагнічування і послідовностями вимірювання з часом tm вимірювання описаний нижче з посиланням на фіг. 3 і фіг. 4. У даному докладному описі для простоти представлення спочатку виходять з ідеалізованої кривої намагнічування В(Н), як показано на фіг. 2. Тут матеріал осердя вільний від залишкової намагніченості і має сталу проникність між обома густинами Bs потоку насичення. При досягненні насичення Bs проникність стрибком стає такою, що дорівнює нулю. На фіг. 3 показана характеристика вторинного струму Is на повному циклі вимірювань часу tz циклу, що складається з послідовностей розмагнічування часу te розмагнічування і інтервалів вимірювання часу tm вимірювання, які лежать між ними. Фіг. 4 показує характеристику напруги Us котушки для циклу вимірювання. Диференціальний струм і, отже, протидіючий струм приймаються такими, що дорівнюють нулю, так що вторинний струм і струм намагнічування рівні. Для простоти представлення в основу постановлена ідеалізована крива намагнічування за фіг. 2. Позитивна послідовність розмагнічування, при якій осердя насичується позитивним струмом вторинної обмотки, починається з прикладання першого імпульсу 44 напруги з негативною напругою -Ue розмагнічування до котушки. Виходячи з негативного залишкового струму -Ir, вторинний струм зростає лінійно. Якщо досягається потік насичення в осерді перетворювача, то індуктивність котушки стає такою, що дорівнює нулю. Вторинний струм стрибкоподібно зростає до максимального значення +Ib, яке задається електронним обмеженням струму. Напруга котушки падає через відсутність самоіндукції від -Ue до нуля. Протягом наступного імпульсу напруги з позитивною напругою +Ue розмагнічування і певною площею 1 "напруга-час" вторинний струм лінійно зменшується до позитивного залишкового струму +Ir. Компенсація опору підтримується в наступному інтервалі вимірювання з часом tz вимірювання вторинного струму на значенні +Ir постійною. Потім йде негативна послідовність розмагнічування, яка з прикладанням першого імпульсу 44 напруги з позитивною напругою +Ue розмагнічування починається з +Ir і закінчується на -Ir. 8 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 Послідовність розмагнічування може однократно настроюватися на застосовний тип перетворювача струму. При заданій напрузі Ue розмагнічування для цього необхідно встановити тривалість першого і другого імпульсу напруги. Наступні орієнтовні значення є прийнятними як практичне правило для часів імпульсу: 2 S S (4) t1 t2 Ue 2 Ue Тут t1 є тривалістю першого імпульсу напруги, t2 є тривалістю другого імпульсу напруги і Фs - потоком насичення перетворювача струму. Потік насичення залежить від матеріалу осердя, числа витків і перерізу осердя (перерізу заліза) і може бути визначений електронним способом. У наведеному вище описі послідовності розмагнічування для простоти ілюстрації виходили з ідеалізованої кривої намагнічування осердя за фіг. 2. На практиці магнітом'які матеріали осердя, що використовуються для перетворювачів диференціального струму, мають визначену коерцитивну силу. Цей факт впливає на характеристику струму намагнічування протягом послідовності розмагнічування. Якщо магнітний потік проходить в осерді перетворювача через значення, яке дорівнює нулю, то струм намагнічування не дорівнює нулю, як показано на фіг. 2, а відповідає коерцитивному струму. Крім того, в залишковому струмі, який залишається в кінці послідовності розмагнічування, міститься частка коерцитивного струму. Залишковий струм також залежить, нарівні з площею "напруга-час" послідовності розмагнічування, від коерцитивного струму відповідного перетворювача струму. Нарівні з матеріалом осердя, також довжина (шлях заліза) осердя перетворювача впливає на коерцитивний струм. Через залежність від довжини, наприклад, перетворювачі струму з великим діаметром мають часто більші коерцитивні струми, ніж малий перетворювач струму. Якщо типовий для перетворювача коерцитивний струм значно (з коефіцієнтом 2) вищий бажаного залишкового струму, то можна бажаний залишковий струм встановлювати тільки по площі "напруга-час" послідовності розмагнічування, при цьому залишковий магнітний потік вибирається близьким до потоку насичення. Оскільки підйом dB/dH кривої намагнічування вже знижений в цій області, в інтервалі вимірювань після послідовності розмагнічування є дуже незначна диференціальна індуктивність котушки. Це в свою чергу приводить до швидшого падіння вторинного постійного струму при неточній компенсації опору. У формулу Is(t) входить диференціальна індуктивність як Ls. Менша індуктивність Ls котушки приводить до меншої сталої часу Т при омічному повному опорі ланцюга вторинного струму Rg, який не дорівнює нулю. Таким чином, бажано, щоб залишковий магнітний потік при бажаному залишковому струмі був помітно меншим потоку насичення, тобто знаходився в області крутого підйому кривої намагнічування. Тому в одній формі виконання винаходу послідовність розмагнічування розширюється на третій імпульс напруги, який прикладається з протилежною полярністю напруги відносно другого імпульсу напруги до котушки. На фіг. 5 представлена повна крива намагнічування перетворювача струму. Тут Φ є зв'язаним з котушкою магнітним потоком Ls і Is - вторинним струмом. Після першого імпульсу напруги послідовності розмагнічування осердя насичене потоком насичення +Фs. Протягом другого імпульсу напруги магнітний потік Ф осердя перетворювача слідує характеристиці виділеного ходу кривої. При магнітному потоці безпосередньо нижче +Фs вторинний струм вже досяг значення залишкового струму -Ir. Якби імпульс напруги закінчився тут, хоча бажаний залишковий струм був би встановлений, однак осердя залишалося б в області з меншим підйомом dФ/dIs кривої, і диференціальна індуктивність була б незначною. Якщо імпульс напруги продовжується до досягнення Ф=0, то хоча осердя перетворювача залишається в області з великим підйомом кривої, але вторинний струм має високе значення коерцитивного струму -Ic. За допомогою третього імпульсу напруги, який є коротким відносно першого і другого імпульсу напруги, високий вторинний струм знижується, причому магнітний потік в осерді перетворювача лише трохи підвищується. Характеристика кривої відхиляється від повної кривої намагнічування і закінчується при залишковому струмі +Ir. Послідовність розмагнічування з трьома імпульсами напруги, таким чином, забезпечує можливість оптимального встановлення залишкового струму і залишкового магнітного потоку. В іншій формі виконання під час послідовності розмагнічування, тобто протягом часу te розмагнічування, не визначається ніякий протидіючий струм і, тим самим, також ніякий диференціальний струм, так що часова характеристика виміряного сигналу, що одержується з вторинного струму в порівнянні з фактичною характеристикою диференціального струму має циклічні пропуски. Для подальшої обробки ці пропуски заповнюються миттєвим значенням, яке дорівнює нулю. Математично це відповідає множенню характеристики диференціального струму на прямокутний сигнал з вирізкою, як показано на фіг. 6. 9 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 Крім того, цей виміряний сигнал з пропусками перед подальшою обробкою множиться на синусоїдальний сигнал, який має частоту циклу і синхронний з циклом, згідно з фіг. 7. Виробленням вищеописаного сигналу з вирізкою і синусоїдальної віконної функції є синусоїдальний сигнал з пропусками при переходах через нуль згідно з фіг. 8. Фіг. 9 показує прямокутний змінний струм намагнічування, який утворюється за допомогою циклічних послідовностей розмагнічування із змінною полярністю потоку насичення. Протидіючий струм для представлення приймається таким, що дорівнює нулю, так що вторинний струм і струм намагнічування рівні. Характеристика вторинного струму Is протягом послідовностей розмагнічування не представлена. Виникаючі пропуски заповнені значенням струму, що дорівнює нулю. При цьому te - час розмагнічування, tm - час вимірювань, tz - час циклу і Ir - залишковий струм. В іншій формі виконання винаходу спосіб виконується за допомогою мікропроцесора, який за допомогою Фур'є-аналізу розкладає сигнали на гармоніки і оцінює. У подальшому тексті робляться посилання на гармоніки прямокутного змінного струму намагнічування відповідно до фіг. 9. Подібний прямокутний сигнал з пропусками має наступні коефіцієнти для косинусних (Cn) і синусних (Sn) членів ряду Фур'є. Cn=0 te 4 Sn=0 для n парного Sn (5) cos(n b) для n непарного при b tz n При цьому n - кратне частоти циклу, b - напівширина пропуску в дуговій мірі. Цей та всі інші ряди Фур'є в тексті нормовані сигнальною амплітудою, що дорівнює одиниці, і періодом 2π. Однак у виміряному сигналі, крім того, є небажані частоти, які виходять з показаного на фіг. 6 прямокутного сигналу вирізок з пропусками. Точніше кажучи, є небажані частоти, оскільки характеристика струму послідовності розмагнічування була заповнена нулями, причому заповнення математично відповідає множенню характеристики вторинного струму на прямокутний сигнал, і прямокутний сигнал, при аналітичному розгляді, складається з множини частот. Кожна частотна складова сигналу вирізки множиться на всі частотні складові диференціального струму, причому відповідно виникають сумарні і розносні частоти. Ступінь, з яким виникають небажані частотні складові, залежить від частотного спектра сигналу вирізки. Його ряд Фур'є має наступні коефіцієнти для косинусних Cn і синусних Sn членів. Сигнал вирізки має наступні коефіцієнти Фур'є: 2b 4 C0 1 Cn sin(n b) для n парного Cn=0 для n непарного n te Sn=0 при b (6) tz При цьому n - кратне частоти циклу і b - напівширина пропуску в дуговій мірі відносно тривалості циклу (час циклу, tz). Малі коефіцієнти виникають в тому випадку, коли b мала. Чим менша b, тим більший сигнал вирізки подібний одиничному сигналу без пропусків, який при множенні не впливає ніяким чином на виміряний сигнал. Через обмежену на практиці напругу розмагнічування час te розмагнічування не може бути довільно малим. Мала b передбачає також високий час циклу. Високий час циклу тоді можливий, якщо часова зміна струму намагнічування протягом інтервалу вимірювання також мала при високому диференціальному постійному струмі. По можливості точна компенсація опору, яка підтримує магнітний потік тривало постійним, також є передумовою для малої частки небажаних частот у виміряному сигналі. Небажані частотні складові можуть додатково знижуватися за рахунок застосування показаною на фіг. 7 віконної функції. Тоді показаний на фіг. 8 синусоїдальний сигнал з пропусками має наступні коефіцієнти Фур'є: Cn=0 2 1 Sn=0 для n парного S1 1 (b sin( 2b)) (7) 2 4 Sn (n sin( b) cos(n b) cos(b) sin( n b)) для n непарного (1 n 2 ) Щоб підтримувати по можливості точну компенсацію опору, згідно з іншою формою виконання винаходу безперервно розпізнаються і компенсуються зміни температурнозалежного опору. Тому послідовність розмагнічування відповідно до винаходу виконана таким чином, що достатньо високий залишковий струм залишається в ланцюгу вторинного струму. 10 UA 115653 C2 5 10 15 Звідси виходить пояснена вище, представлена на фіг. 9 ідеальна прямокутна характеристика вторинного струму, причому знову протидіючий струм може прийматися як нульовий. Характеристика вторинного струму послідовності розмагнічування не представлена. Вторинний струм обумовлює протягом інтервалу вимірювання падіння напруги на опорі котушки і негативному опорі двополюсника. При неточній компенсації сума напруг не дорівнює нулю, що приводить до зміни магнітного потоку і, тим самим, до зміни вторинного струму. При перекомпенсації, тобто при дуже великій величині негативного опору, вторинний струм наростає. При неповній компенсації або недокомпенсації він спадає. Виникає представлена на фіг. 10 характеристика, яка розглядається як сума з первинного прямокутного вторинного сигналу з фіг. 9 і представленого на фіг. 11 сигналу в подвійній пилкоподібній формі. Наявність і полярність відповідної складової сигналу подвійної пилкоподібної форми можуть знову визначатися за допомогою кореляції. При цьому використовується той факт, що ряд Фур'є подібного сигналу подвійної пилкоподібної форми, має косинусні складові, які не містяться в прямокутному сигналі за фіг. 9. Сигнал подвійної пилкоподібної форми згідно з фіг. 11 має наступні коефіцієнти Фур'є: Cn=0 для n парного 2 4 Cn sin( n b) cos(n b) для n непарного (8) n ( 2a) n 2 Sn=0 для n парного Sn 2 cos(n b) для n непарного n 20 25 30 35 40 45 50 55 Залежно від певної полярності С1-компоненти негативний опір підвищується або знижується і, тим самим, регулюється компенсація опору. Переважним чином при визначенні С1-компоненти застосовується вищеописана віконна функція. На основі 1 sin( x ) cos(y ) (sin( x y ) sin( x y )) (9) 2 при множенні виміряного сигналу на віконну функцію з С1-компоненти виходить синусний сигнал S2 з подвоєною частотою циклу. Відповідним чином далі визначається кореляція. Внаслідок використання сигналу пилкоподібної форми, тобто сигналу з лінійним наростанням, можна говорити про допустиме спрощення, оскільки амплітуда сигналу подвійної пилкоподібної форми відносно залишкового струму є дуже малою. Згідно з рівнянням (1) для Is(t), це відповідає дуже малому t, в порівнянні зі сталою часу Т, так що характеристика від Is(0) до I(s) може апроксимуватися прямою. Метою компенсації опору є підтримувати напругу Ui індукції на індуктивності Ls котушки на фіг. 1 незалежно від вторинного струму на значенні, що дорівнює нулю. При застосуванні операційних підсилювачів можна за рахунок їх напруги зміщення на виміряний сигнал накладати сталу напругу. Спираючись на техніку операційних підсилювачів, тут напруга (Uo) зміщення позначається сума всіх небажаних постійних напруг в ланцюгу вторинного струму. Якщо тепер в ланцюгу вторинного струму виникає напруга зміщення, то за правилом контурів напруга індукції стає такою, що не дорівнює нулю і відповідає напрузі зміщення. Наслідком цього є часова зміна магнітного потоку і струму намагнічування, що приводить до помилок вимірювання при диференціальному струмі. Струм намагнічування змінюється при цьому лінійно із зміною швидкості dI/dt=Ui/Ls. Достатньо малу напругу зміщення забезпечують спеціально збалансовані прецизійні операційні підсилювачі або підсилювачі з переривником. У зв'язку з їх малою шириною смуги, підсилювачі з переривником тут не можуть використовуватися. Прецизійні операційні підсилювачі підвищують витрати на електроніку, що не відповідає поставленій задачі. Тому, згідно з особливою формою виконання винаходу, додаткове кероване джерело 24 напруги компенсації зміщення введене в ланцюг вторинного струму. Це джерело 24 напруги компенсації при цьому керується таким чином, що його напруга протилежна напрузі зміщення і компенсує його, так що напруга індукції знову дорівнює нулю. Для того щоб цю компенсацію зміщення підтримувати по можливості точною, необхідно безперервно розпізнавати і компенсувати зміни температурно-залежної напруги зміщення. При точній компенсації зміщення виникає представлена на фіг. 9 прямокутна характеристика вторинного струму, причому для цього представлення знову протидіючий струм приймається таким. що дорівнює нулю. При неточній компенсації на цю прямокутну характеристику сигналу накладається сигнал пилкоподібної форми згідно з фіг. 12. Наявність і полярність відповідного сигналу пилоподібої форми у виміряному сигналі може визначатися за допомогою кореляції, тому що сигнал пилкоподібної форми в S2 містить гармоніку частоти циклу, яка не має місця ні в прямокутному 11 UA 115653 C2 змінному струмі намагнічування, ні в сигналі подвійної пилкоподібної форми компенсації опору. Сигнал пилкоподібної форми згідно з фіг. 12 має наступні коефіцієнти Фур'є: 1 2b 2 C0 Cn sin(n b) для n парного Cn=0 для n непарного 2 n 2 4 для n парного Sn=0 для n непарного (10) Sn cos(n a) n ( 2b)n 2 5 10 15 20 25 30 35 40 45 50 55 Залежно від полярності визначеної S2-компоненти у виміряному сигналі, напруги керованого джерела 24 напруги підвищується або знижується і, тим самим, регулює компенсацію зміщення. На основі фіг. 13 далі детальніше обговорюється приклад відповідного винаходу пристрою і сигнальний потік. Фіг. 13 показує блок-схему пристрою для виконання способу. У показаній тут формі виконання ланцюг 4 вторинного струму послідовного включення котушки 3 має двополюсник 5, що утворює негативний опір Rz двополюсника, засіб сприйняття 10 струму для вторинного струму Is, кероване джерело 14 напруги послідовності розмагнічування і кероване джерело 24 напруги для компенсації зміщення. Засіб сприйняття 10 струму і перемикач 11 утворюють з вторинного струму Is виміряний сигнал. Засіб керування 15 для послідовності розмагнічування керує положенням перемикача 11 таким чином, що виміряний сигнал протягом часу te розмагнічування відповідає нульовому сигналу, а протягом часу tm вимірювання - вихідному сигналу засобу сприйняття 10 струму. Засіб керування 15 виробляє послідовності розмагнічування і керує через вхід джерела 14 напруги вторинного струму напругою, що вводиться в ланцюг 4. Виміряний сигнал перемикачем 11 вводиться через суматор 12 в формувач 13 ефективного значення. Суматор 12, корелятор 16 компенсації 41 залишкового струму і генератор 17 прямокутного сигналу компенсації 41 залишкового струму видаляють при цьому з виміряного сигналу складову прямокутного змінного струму намагнічування. Для цього виміряний сигнал також подається на корелятор компенсації 16 залишкового струму, який через амплітуду основної хвилі S1 прямокутного змінного струму намагнічування визначає амплітуду прямокутного змінного струму намагнічування. Певна амплітуда подається на генератор 17 прямокутного сигналу. Він виробляє прямокутний сигнал з частотою циклу, синхронний з циклом, з амплітудою, заданої корелятором 16 компенсації 41 залишкового струму. Сигнальна характеристика на виході генератора 17 прямокутного сигналу відповідає, таким чином, характеристиці струму намагнічування у виміряному сигналі. Суматор 12 віднімає з виміряного сигналу коректуючий сигнал, сформований таким чином генератором 17 прямокутного сигналу, і подає результат на формувач 13 ефективного значення. Генератор 9 віконної функції, помножувач 8, корелятор 7 пилкоподібного сигналу, регулятор 6 компенсації 40 опору і двополюсник 5 компенсації 40 опору служать для компенсації опору Rcu котушки і регулювання компенсації опору. Для цього на входи помножувача 8 компенсації опору також подається виміряний сигнал і синусоїдальний сигнал з частотою циклу і синхронний з циклом від генератора 9 компенсації опору, і, тим самим, на виміряний сигнал накладається віконна функція. Вироблення обох сигналів подається на корелятор 7 пилкоподібного сигналу. Корелятор 7 пилкоподібного сигналу визначає по амплітуді гармоніки S2, яка в помножувачі 8 утворюється з гармоніки С1 у виміряному сигналі, амплітуду і полярність сигналу подвійної пилкоподібної форми у виміряному сигналі. Регулятор 6 компенсації опору керує негативним опором двополюсника 5 таким чином, що визначена корелятором 7 пилкоподібного сигналу амплітуда стає такою, що дорівнює нулю, таким чином, негативний опір двополюсника 5 компенсує омічний опір Rcu вторинної котушки. Корелятор 22, регулятор 23 і кероване джерело 24 напруги компенсації 42 зміщення служать для компенсації напруги зміщення в ланцюгу 4 вторинного струму і регулювання цієї компенсації. Корелятор 22 визначає по амплітуді гармоніки S2 у виміряному сигналі амплітуду пилкоподібної складової у виміряному сигналі. Регулятор 23 керує керованим джерелом 24 напруги так, що амплітуда стає такою, що дорівнює нулю, тобто напруга зміщення ланцюга вторинного струму компенсується напругою керованого джерела 24 напруги. На фіг. 14 показана інша переважна форма виконання винаходу. Сигнал. який одержується засобом сприйняття 10 струму, через фільтр 18 накладання спектрів і аналогово-цифровий перетворювач 19 подається на обчислювач 20. Обчислювач 20 керує через цифровоаналоговий перетворювач 21 і джерело 25 напруги введеним в ланцюг 4 вторинного струму напругою. Протягом інтервалів вимірювання обчислювач 20 керує джерелом 25 напруги таким чином, що послідовне з'єднання з засобу виявлення 10 струму і джерела 25 напруги утворює двополюсник з негативним омічним опором -Rcu. Обчислювач 20 виробляє також послідовності 12 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 60 розмагнічування і вводить через джерело 25 напруги необхідні напруги в ланцюг 4 вторинного струму. Крім того, він визначає залишковий струм і регулює компенсацію опору і компенсацію зміщення. Ця форма виконання може переважним чином застосовуватися для того, щоб визначати необхідні для способу параметри відповідно застосовуваного перетворювача струму. Вихідне значення для омічного опору визначається тим, що через джерело 25 напруги стала напруга вводиться в ланцюг 4 вторинного струму, і засобом виявлення 10 струму вимірюється встановлюваний постійний струм. Температурно-залежні зміни омічного опору вторинної котушки потім, як описано в способі, розпізнаються, і регулюється компенсація опору. Крім того, визначається потік насичення, при цьому обчислювач 20 за допомогою джерела 25 напруги вводить в ланцюг 4 вторинного струму прямокутну змінну напругу. При цьому обчислювач 20 завжди змінює полярність напруги, коли він за допомогою засобу виявлення 10 струму розпізнає типовий для насичення стрибкоподібний підйом вторинного струму. За рахунок цього осердя коливається між своїми двома потоками насичення. З тривалості періоду коливання, що виходить, і амплітуди змінної напруги потім обчислюється потік насичення. Переважним в цій формі виконання є те, що необхідна для способу вимірювання обробка сигналу згідно з фіг. 13 значною мірою реалізовується за допомогою програмного забезпечення. Витрати на електроніку незначні, що приводить до дуже низьких витрат і відповідає поставленій задачі. Мале необхідне місце для розміщення електронних компонентів полегшує конструювання багатоканальних пристроїв для виконання способу, до яких можуть бути підключені декілька перетворювачів струму. Декілька каналів, таким чином, спільно використовують обчислювач, електроживлення і електроніку зв'язку. Витрати на створення електричного обладнання, які доводяться на кожний канал контролю, за рахунок цього додатково знижуються. Далі з посиланням на фіг. 15 як приклад детальніше описується можливе виконання компенсації опору з активним двополюсником. У показаній тут формі виконання ланцюг 4 вторинного струму має послідовне з'єднання вторинної котушки 3, двополюсника 5, який утворює негативний опір двополюсника, з підсилювачами V1 і V2. Підсилювач V1 працює як перетворювач струм-напруга з коефіцієнтом передачі F1=U1/Is=R1. V2 підключений як інвертуючий підсилювач з F2=Us/U1=-R3/R2. Для R2=R3 як коефіцієнт передачі для двополюсника виходить F1*F2=-R1. Якщо, таким чином, представлена схема обтікається позитивним вторинним струмом, то встановлюється негативне падіння напруги Us=-R1*Is. Схема утворює негативний омічний опір. Для точної компенсації опору опір R1 встановлюється на значення Rcu. При будь-якому вторинному струмі Is тоді виходить для падіння напруги Ui на індуктивності котушки Ui=Ucu+Us=0. При точній компенсації опору ланцюг 4 вторинного струму не допускає ніякої напруги Ui індукції, тобто ніякої зміни магнітного потоку в осерді. Найменша напруга індукції привела б на омічному повному опорі ланцюга вторинного струму, що дорівнює нулю, негайно до високого вторинного струму, який протидіє зміні магнітного потоку. У ще одній формі виконання, крім того, застосовуються довгі часи кореляції, так що загалом здійснюється лише інерційна реакція на результати кореляції. Переважним чином, за рахунок кореляції по багатьох циклах вимірювань і за рахунок низької частоти циклу близько 0,3 Гц досягається мала ширина смуги вимірювання амплітуди. Частотний діапазон, в якому частотна складова диференціального струму може привести до помилок вимірювання, стає вузьким. Також передбачається, що раптові зміни в результаті кореляції оцінюються як перешкода, для якої результати кореляції відкидаються і, при необхідності, частота циклу і, тим самим, чутливий частотний діапазон змінюється. За рахунок цього переважним чином досягається те, що спосіб вимірювання може в меншій мірі піддаватися перешкоді через небажані частотні складові в диференціальному струмі. Це має особливе значення при визначенні залишкового струму і при регулюванні компенсації опору і при регулюванні компенсації зміщування, де амплітуди певних, синхронних з циклом частотних складових у виміряному сигналі вимірюються за допомогою кореляції (S1, C1, S2). Якщо диференціальний струм сам містить ці частоти, то саме при цьому можуть в принципі виникнути помилки вимірювання. Тому відповідно до винаходу використовується той факт, що зміни залишкового струму і омічного опору вторинної котушки виникають через температурні зміни, тобто є повільними процесами. При цьому швидкі зміни результатів кореляції вказують на перешкодну частотну складову в диференціальному струмі. Тому також переважно, що в провідниках, які охоплюються осердям, не індукується перешкодна напруга. Описаний в рівні техніки мультивібратор прикладає до вторинної котушки 13 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 60 прямокутну, з крутими фронтами змінну напругу. Хоча частота мультивібратору звичайно лежить нижче 1 кГц, гармоніки досягають до 150 кГц і тому релевантні для оцінки електромагнітної сумісності пристрою. Позначення в формулах А сигнал вирізки В магнітна густина потоку Bs густина потоку насичення Cn косинусні коефіцієнти Фур'є F віконна функція F1 коефіцієнт передачі F2 коефіцієнт передачі Ф зчеплений магнітний потік Фs потік насичення Н напруга магнітного поля Ib максимальне значення вторинного струму Ic коерцитивний струм Id сигнал подвійної пилкоподібної форми Ir залишковий струм Is вторинний струм Is0 вихідне значення вторинного постійного струму Iz сигнал пилкоподібної форми Ls індуктивність котушки R1 опір R2 опір R3 опір Rcu омічний опір Rg омічний повний опір ланцюга вторинного струму Rz опір двополюсника Sn синусні коефіцієнти Фур'є Т стала часу U1 вихідна напруга підсилювача Ucu напруга на омічному опорі Ue напруга розмагнічування Ui напруга індукції Us напруга котушки В напівширина пропуску в дуговій мірі Fz частота циклу n кратне частоти циклу t час t1 тривалість першого імпульсу напруги t2 тривалість другого імпульсу напруги te час розмагнічування tm час вимірювання tz час циклу Uo напруга зміщення А прямокутний сигнал вирізки Wie прямокутний змінний струм намагнічування Перелік посилальних позицій 1 площа напруга-час 2 первинний провідник 3 вторинна котушка 4 ланцюг вторинного струму 5 двополюсник 6 регулятор компенсації опору 7 корелятор сигналу пилкоподібної форми 8 помножувач компенсації опору 9 генератор віконної функції 10 виявлення струму 11 перемикач 14 UA 115653 C2 5 10 15 20 12 суматор компенсації залишкового струму 13 формувач ефективного значення 14 джерело напруги послідовності розмагнічування 15 керування частотою розмагнічування 16 корелятор компенсації залишкового струму 17 генератор прямокутного сигналу 18 фільтр накладання спектрів 19 аналогово-цифровий перетворювач 20 обчислювач 21 цифрово-аналоговий перетворювач 22 корелятор компенсації зміщення 23 регулятор компенсації зміщення 24 джерело напруги компенсації зміщення 25 джерело напруги V1 операційний підсилювач V2 операційний підсилювач R1 опір R2 опір R3 опір 40 компенсація опору 41 компенсація залишкового струму 42 компенсація зміщення 43 осердя перетворювача 44 імпульс напруги 25 ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 1. Спосіб вимірювання електричних струмів за допомогою перетворювача струму, в якому - в ланцюгу (4) вторинного струму перетворювача струму омічний опір (Rcu) вторинної котушки (3) компенсують за допомогою активного двополюсника (5), який утворює негативний омічний опір (Rz), для підтримки постійної складової струму вторинного струму (Is), індукованого первинним струмом у вторинній котушці, причому величина негативного опору активного двополюсника (5) відповідає омічному опору (Rcu) вторинної котушки (3) і причому вимірюють вторинний струм (Is) перетворювача струму для реєстрації відповідного змішаному струму первинних провідників вторинного постійного струму і/або протидіючого струму, - для створення певного магнітного потоку в осерді перетворювача через магнітну котушку в осердя перетворювача вводять попередньо визначену послідовність імпульсів, причому осердя перетворювача намагнічують до потоку (Фs) насичення шляхом прикладання першого імпульсу напруги або струму до котушки перетворювача і потім за допомогою прикладання другого імпульсу напруги зворотної полярності і певної площі (1) напруга-час магнітний потік знову зменшують. 2. Спосіб за п. 1, в якому площу (1) "напруга-час" другого імпульсу напруги вибирають так, що після другого імпульсу напруги певний третій імпульс напруги прикладають з полярністю, протилежною другому імпульсу напруги, так, що в перетворювачі досягається робоча точка, в якій при струмі намагнічування, малому відносно струму насичення, диференціальна індуктивність перетворювача є якомога більшою. 3. Спосіб за п. 1 або 2, в якому струм намагнічування, який відповідає створеному певному магнітному потоку у вторинній котушці (3), визначають за рахунок того, що генерують змінний струм намагнічування, послідовність імпульсів прикладають із заданою частотою навперемінно, з відповідно зворотним знаком, для обох полярностей насичення. 4. Спосіб за п. 3, в якому формують цикли вимірювання з часом (tz) циклу, який має в кожному періоді часовий інтервал з часом (te) розмагнічування і часовий інтервал з часом (tm) вимірювання. 5. Спосіб за п. 3 або 4, в якому визначають амплітуду виникаючого змінного струму намагнічування і генерують сигнал корекції, який відповідає ходу і амплітуді прямокутного змінного струму намагнічування, і виміряний сигнал відповідно коректують на певний сигнал корекції. 15 UA 115653 C2 5 10 15 20 25 30 35 40 45 50 55 6. Спосіб за будь-яким з попередніх пунктів, в якому виміряний сигнал для подальшої обробки регулюють так, що всі часові інтервали (te) у виміряному сигналі, які відповідають часовому інтервалу імпульсу напруги попередньо визначеної послідовності імпульсів однієї полярності, забезпечуються попередньо визначеним сталим значенням, зокрема нульовим значенням. 7. Спосіб за п. 6, в якому відрегульований виміряний сигнал, крім того, множать на віконну функцію, зокрема на синусоїдальний сигнал, який має частоту циклу і синхронний з циклом. 8. Спосіб за будь-яким з попередніх пунктів, в якому величину генерованого негативного омічного опору (Rz) регулюють на основі певної неповної компенсації або перекомпенсації омічного опору (Rcu) вторинної котушки (3). 9. Спосіб за п. 8, в якому визначають неповну компенсацію або перекомпенсацію омічного опору (Rcu) вторинної котушки (3), при цьому з виміряного сигналу визначають амплітуду гармоніки, яка виникає при відхиленні змінного струму намагнічування від прямокутної форми сигналу. 10. Спосіб за будь-яким з попередніх пунктів, в якому визначають і потім компенсують напругу зміщення, виникаючу у вторинному ланцюгу, зокрема, через застосовувані електронні компоненти. 11. Спосіб за п. 10, в якому значення напруги зміщення визначають за допомогою кореляції за рахунок того, що з виміряного сигналу визначають амплітуду гармоніки, за допомогою якої простий сигнал (Iz) пилкоподібної форми відрізняється від сигналу (Id) подвійної пилкоподібної форми або прямокутного сигналу. 12. Спосіб за будь-яким з попередніх пунктів, що застосовується для вимірювання диференціальних струмів або струмів несправності в електричному пристрої, які, нарівні зі змінною складовою, також містять сталу складову струму. 13. Спосіб за будь-яким з попередніх пунктів, в якому магнітна котушка для видачі попередньо заданої послідовності імпульсів в осердя перетворювача є вторинною котушкою (3) перетворювача. 14. Пристрій для вимірювання електричних струмів, який містить щонайменше один перетворювач струму і виконаний з можливістю здійснення способу вимірювання за будь-яким з пп. 1-13. 15. Пристрій за п. 14, причому пристрій містить щонайменше одне кероване джерело (25) напруги і щонайменше один засіб виявлення (10) струму, які з'єднані з засобом керування. 16. Пристрій за п. 15, який містить активний двополюсник (5), який через перший регулятор з'єднаний з засобом виявлення (10) струму так, що утворюється ланцюг регулювання для певних частотних складових виміряного сигналу, згенерованого за допомогою засобу виявлення (10) струму. 17. Пристрій за п. 15 або 16, який додатково містить другий регулятор (6) для узгодження негативного опору (Rz) двополюсника з температурно-залежним омічним опором котушки. 18. Пристрій за п. 17, в якому другий регулятор виконаний з можливістю підстроювання негативного опору (Rz) двополюсника через коефіцієнти Фур'є і за допомогою компенсації небажаних частотних складових виміряного сигналу. 19. Пристрій за будь-яким з пп. 15-18, в якому засіб керування реалізований мікроконтролером. 20. Система для вимірювання електричних струмів, що містить індуктивний перетворювач струму і пристрій згідно з будь-яким з пп. 15-19. 21. Спосіб вимірювання електричних струмів за допомогою перетворювача струму, що включає в себе наступні етапи: розширення схеми вторинного ланцюга (4) перетворювача струму електричним пристроєм, так що утворюючий негативний омічний опір (Rz) активний двополюсник (5) і засіб виявлення (10) струму у вторинному ланцюзі (4) перетворювача з'єднані послідовно, і джерело (25) напруги включене послідовно в ланцюг струму вторинної котушки (3) перетворювача, і блок керування з'єднаний з засобом виявлення (10) струму і джерелом (25) напруги; зчитування засобу виявлення (10) струму і керування джерелом (25) напруги за допомогою блока керування для виконання способу за будь-яким з пп. 1-13; і видача вихідного сигналу від блока керування, який містить складову постійного струму і складову змінного струму електричного первинного струму перетворювача. 16 UA 115653 C2 17 UA 115653 C2 18 UA 115653 C2 19 UA 115653 C2 20 UA 115653 C2 21 UA 115653 C2 Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 22
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for measuring electric currents by means of a current transformer
Автори англійськоюRathsmann, Stefan
Автори російськоюРатсманн Штэфан
МПК / Мітки
МПК: G01R 15/18, H02H 3/32
Мітки: струмів, електричних, спосіб, перетворювача, допомогою, вимірювання, пристрій, струму
Код посилання
<a href="https://ua.patents.su/24-115653-sposib-i-pristrijj-dlya-vimiryuvannya-elektrichnikh-strumiv-za-dopomogoyu-peretvoryuvacha-strumu.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для вимірювання електричних струмів за допомогою перетворювача струму</a>
Пристрій для вимірювання струмів в обмотках високовольтних маслонаповнених трансформаторів, автотрансформаторів або електричних реакторів
Номер патенту: 120752
Опубліковано: 10.11.2017
Автор: Конторович Леонід Нісонович
МПК: H01F 27/42, H01F 38/28
Мітки: вимірювання, високовольтних, трансформаторів, електричних, струмів, реакторів, автотрансформаторів, пристрій, обмотках, маслонаповнених
Формула / Реферат:
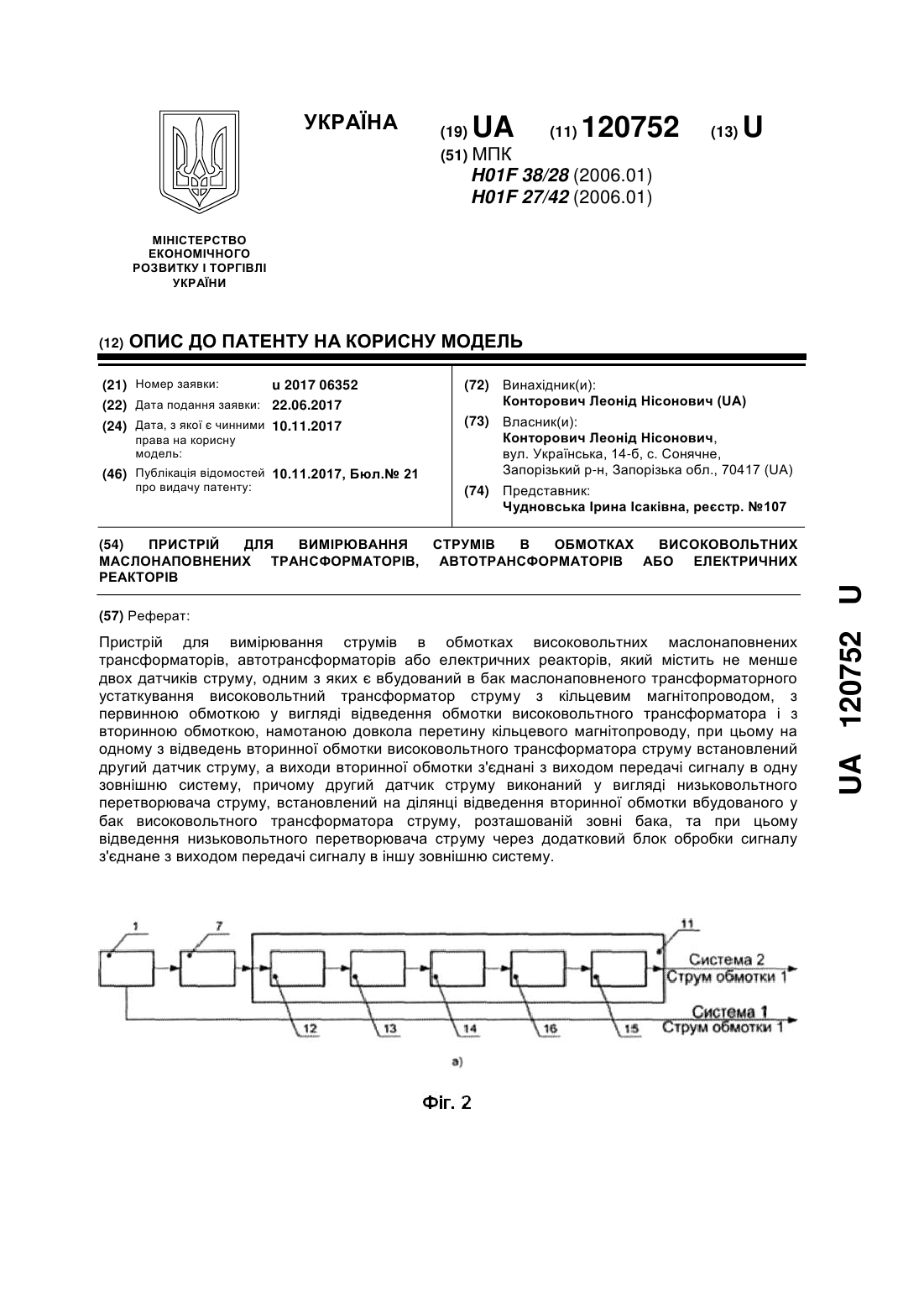
1. Пристрій для вимірювання струмів в обмотках високовольтних маслонаповнених трансформаторів, автотрансформаторів або електричних реакторів, який містить не менше двох датчиків струму, одним з яких є вбудований в бак маслонаповненого трансформаторного устаткування високовольтний трансформатор струму з кільцевим магнітопроводом, з первинною обмоткою у вигляді відведення обмотки високовольтного трансформатора і з вторинною обмоткою, намотаною...
Пристрій для вимірювання величини струму тягових електричних машин тепловозів
Номер патенту: 60715
Опубліковано: 25.06.2011
Автори: Кислий Дмитро Миколайович, Дацьков Василь Юрійович, Коренюк Роман Олександрович, Пономарьов Дмитро Андрійович, Сердюк Володимир Никандрович
МПК: G01R 19/25
Мітки: величини, машин, пристрій, тепловозів, вимірювання, тягових, струму, електричних
Формула / Реферат:
Пристрій для вимірювання величини струму тягових електричних машин тепловозів, що складається з провідника, по якому проходить струм, який відрізняється тим, що додатково містить датчик Холла, до якого підключено аналого-цифровий перетворювач, який з'єднаний з вихідним буферним регістром.
Спосіб обмеження струмів коротких замикань у електричних мережах змінного струму нелінійними обмежуючими елементами
Номер патенту: 115635
Опубліковано: 27.11.2017
Автори: Мухін Станіслав Олексійович, Шеметуха Віктор Тимофійович
МПК: H02H 3/16, H02H 7/04, H02H 9/06, H02H 9/04, H02H 9/02
Мітки: мережах, обмежуючими, змінного, струму, нелінійними, коротких, спосіб, обмеження, замикань, елементами, струмів, електричних
Формула / Реферат:
Спосіб обмеження струмів коротких замикань у електричних мережах змінного струму нелінійними обмежуючими елементами, який полягає у тому, що до лінії електропередачі (ЛЕП) приєднують нелінійні обмежуючі елементи з реактивними ємнісним та індуктивним імпедансами, який відрізняється тим, що принаймні один нелінійний обмежуючий елемент з реактивним ємнісним імпедансом (ємнісний НОЕ), одну ЛЕП та один нелінійний обмежуючий елемент з реактивним...
Спосіб багатофазового вимірювання діючого значення напруги в електричних мережах змінного струму
Номер патенту: 86183
Опубліковано: 25.12.2013
Автор: Хорошок Сергій Вікторович
МПК: G01R 19/02
Мітки: значення, спосіб, вимірювання, багатофазового, струму, напруги, мережах, електричних, змінного, діючого
Формула / Реферат:
Спосіб вимірювання діючого значення напруги в електричних мережах змінного струму, який відрізняється тим, що вимірювання діючого значення напруги виконується багатофазово - одночасно декілька вимірювачами інтеграла квадрата поточного значення напруги за час, дорівнюючий періоду, з різних моментів фазового кута вимірюваної напруги з наступним діленням отриманих результатів на тривалість цього періоду та витягом квадратного кореня.
Спосіб вимірювання електричного струму і пристрій для його реалізації
Номер патенту: 58603
Опубліковано: 15.08.2003
Автори: Іменохоєв Іван Володимирович, Фішман Петро Вікторович, Ходак Ілля Якович
МПК: G01R 19/25
Мітки: струму, електричного, вимірювання, спосіб, реалізації, пристрій
Формула / Реферат:
1. Спосіб вимірювання електричного струму, при якому здійснюють трансформацію вимірюваного струму трансформатором струму, аналогово-цифрове перетворення вторинного струму, математичну обробку миттєвих поточних значень вимірюваного струму і видавання результатів до пристрою вимірювання та релейного захисту, який відрізняється тим, що вимірювання миттєвих значень вторинного струму здійснюють через малі рівні проміжки часу, миттєві поточні...
Попередній патент: Сполука, що містить модифікований олігонуклеотид, комплементарна mir-21
Наступний патент: Пристрій, системи та способи моніторингу врожайності
Випадковий патент: Спосіб хвильової обробки привибійної зони структурованого нафтоносного пласта