Пристрій, системи та способи моніторингу врожайності
Формула / Реферат
1. Пристрій для вимірювання врожаю, що збирається збиральним комбайном, включаючи елеватор очищеного зерна, який переносить зернову масу; при цьому елеватор очищеного зерна має кожух, верхню зірочку і нижню зірочку; при цьому верхня зірочка і нижня зірочка визначають площину елеватора, який включає в себе:
поверхню датчика, розташовану над верхньою зірочкою; при цьому зазначена поверхня датчика має передній кінець і задній кінець; при цьому зазначені передній кінець і задній кінець розташовані суміжно з площиною елеватора;
жорстку опору, що має передню частину і задню частину; при цьому зазначена передня частина жорстко підтримує зазначений передній кінець зазначеної поверхні датчика, зазначена задня частина жорстко підтримує зазначений задній кінець зазначеної поверхні датчика; і
пружно-гнучкий елемент, який має перший кінець і другий кінець; при цьому зазначений перший кінець жорстко приєднаний до зазначеної опори і зазначений другий кінець приєднаний до кожуха елеватора очищеного зерна;
в якому зазначена жорстка опора і зазначений пружно-гнучкий елемент взаємодіють, щоб утримувати зазначену поверхню датчика в першому положенні, коли сила зерна не діє на зазначену поверхню датчика;
в якому зазначена жорстка опора і зазначений пружно-гнучкий елемент взаємодіють, щоб дозволити зазначеній поверхні датчика відхилятися у друге положення, коли сила зерна від зернової маси, що викидається елеватором, діє на зазначену поверхню датчика;
в якому зазначений передній кінець зазначеної поверхні датчика переміщується вгору на першу відстань відносно елеватора очищеного зерна у міру того, як зазначена поверхня датчика відхиляється від зазначеного першого положення у зазначене друге положення;
в якому зазначений задній кінець зазначеної поверхні датчика переміщується вгору на другу відстань відносно елеватора очищеного зерна у міру того, як зазначена поверхня датчика відхиляється від зазначеного першого положення у зазначене друге положення; і
в якому зазначена перша відстань дорівнює зазначеній другій відстані таким чином, що зазначене перше положення є паралельним зазначеному другому положенню.
2. Пристрій за п. 1, в якому зерно у зерновій масі, що контактує із зазначеною поверхнею датчика, має складову горизонтальної швидкості, паралельну поверхні датчика безпосередньо перед контактуванням з поверхнею датчика.
3. Пристрій за п. 2, в якому зернова маса має складову горизонтальної швидкості, паралельну поверхні датчика при контактуванні з поверхнею датчика.
4. Пристрій за п. 1, який додатково включає в себе поверхню перед датчиком, що прилягає до поверхні датчика; при цьому зазначена поверхня перед датчиком розташована таким чином, щоб забезпечити безперервний потік зерна від зазначеної поверхні перед датчиком до зазначеної поверхні датчика, так щоб складова горизонтальної швидкості зберігала той же напрямок у міру того, як зерно переміщується від переднього кінця зазначеної поверхні перед датчиком до зазначеного заднього кінця зазначеної поверхні перед датчиком.
5. Пристрій за п. 4, в якому вертикальне зміщення між зазначеною поверхнею перед датчиком і зазначеною поверхнею датчика є меншим ніж десять сотих часток дюйма.
6. Пристрій за п. 4, який додатково включає в себе поверхню після датчика, що прилягає до поверхні датчика; при цьому зазначена поверхня після датчика розташована таким чином, щоб забезпечити безперервний потік зерна від зазначеної поверхні датчика до зазначеної поверхні після датчика, так щоб складова горизонтальної швидкості зерна зберігала той же напрямок у міру того, як зерно переміщується від зазначеного переднього кінця зазначеної поверхні датчика до заднього кінця зазначеної поверхні після датчика.
7. Пристрій за п. 1, в якому зазначена поверхня датчика відхиляється за допомогою переміщення при контакті з зерновою масою.
8. Пристрій за п. 7, в якому зазначена поверхня датчика відхиляється менше ніж на десять сотих часток дюйма.
9. Пристрій за п. 7, який додатково включає в себе:
датчик переміщення, розташований для вимірювання відхилення зазначеної поверхні датчика.
10. Пристрій за п. 9, в якому зазначена поверхня датчика є недеформованою при контакті з зерновою масою.
11. Пристрій за п. 1, в якому зазначена зернова маса є безперервною при контактуванні із зазначеною поверхнею датчика, і в якому зазначена зернова маса є одночасно суміжною із зазначеними переднім кінцем і зазначеним заднім кінцем при переміщенні вздовж зазначеної поверхні датчика.
12. Пристрій за п. 1, який додатково включає в себе:
першу пружину; і
другу пружину, де зазначена перша пружина і зазначена друга пружина пружно утримують поверхню датчика у невідхиленому положенні.
13. Пристрій за п. 1, в якому пристрій має власну частоту, вищу ніж 400 Гц.
Текст
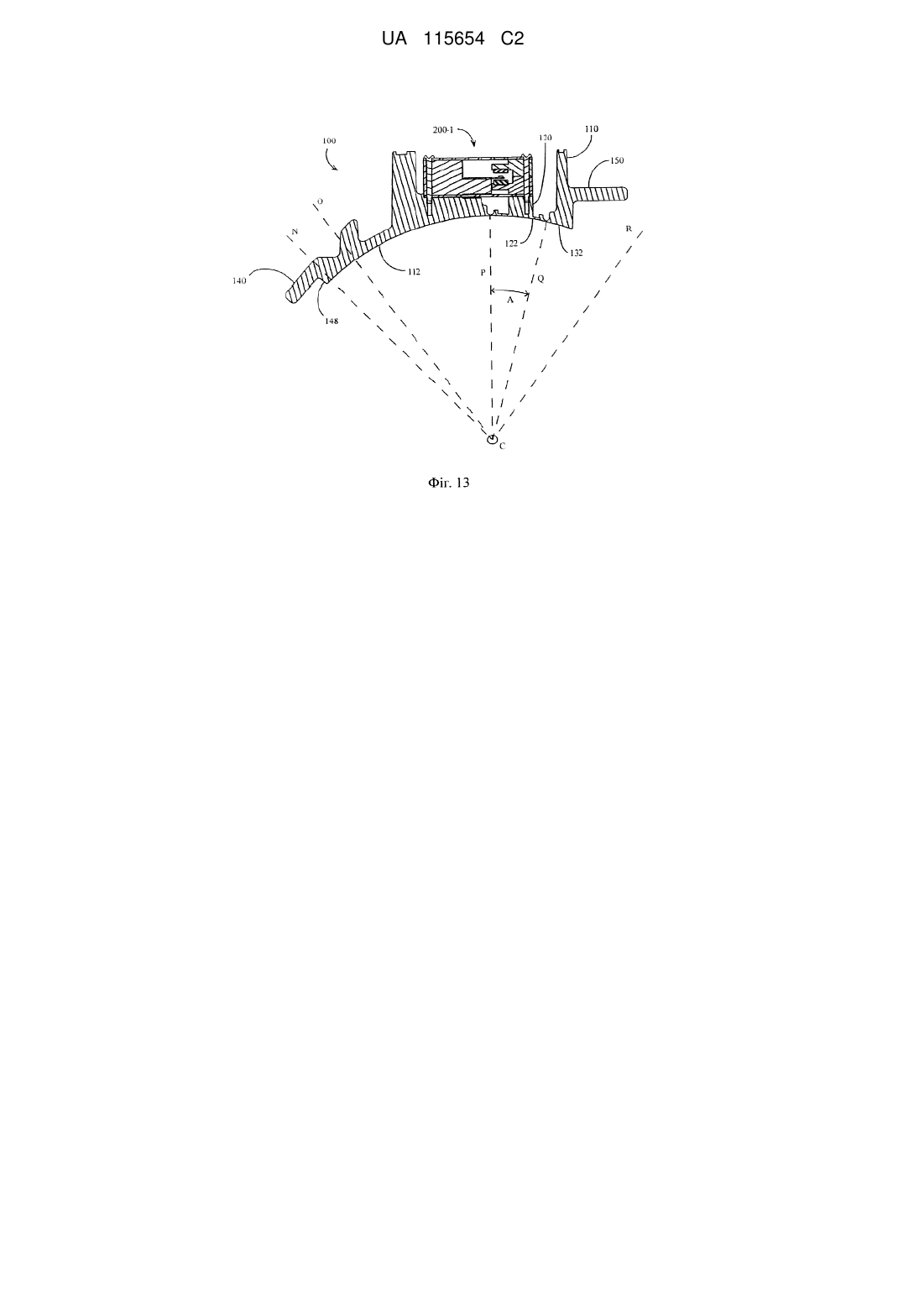
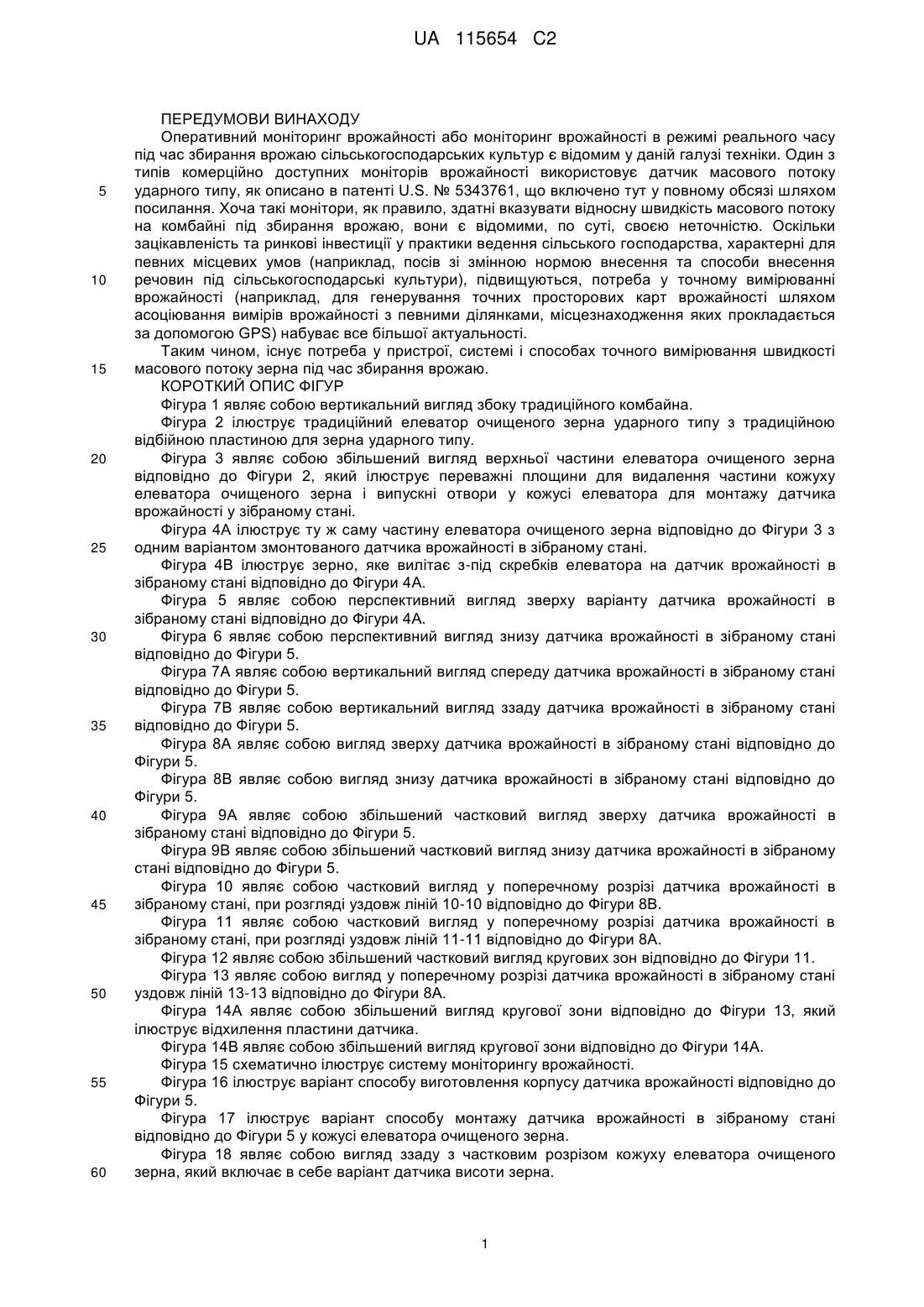
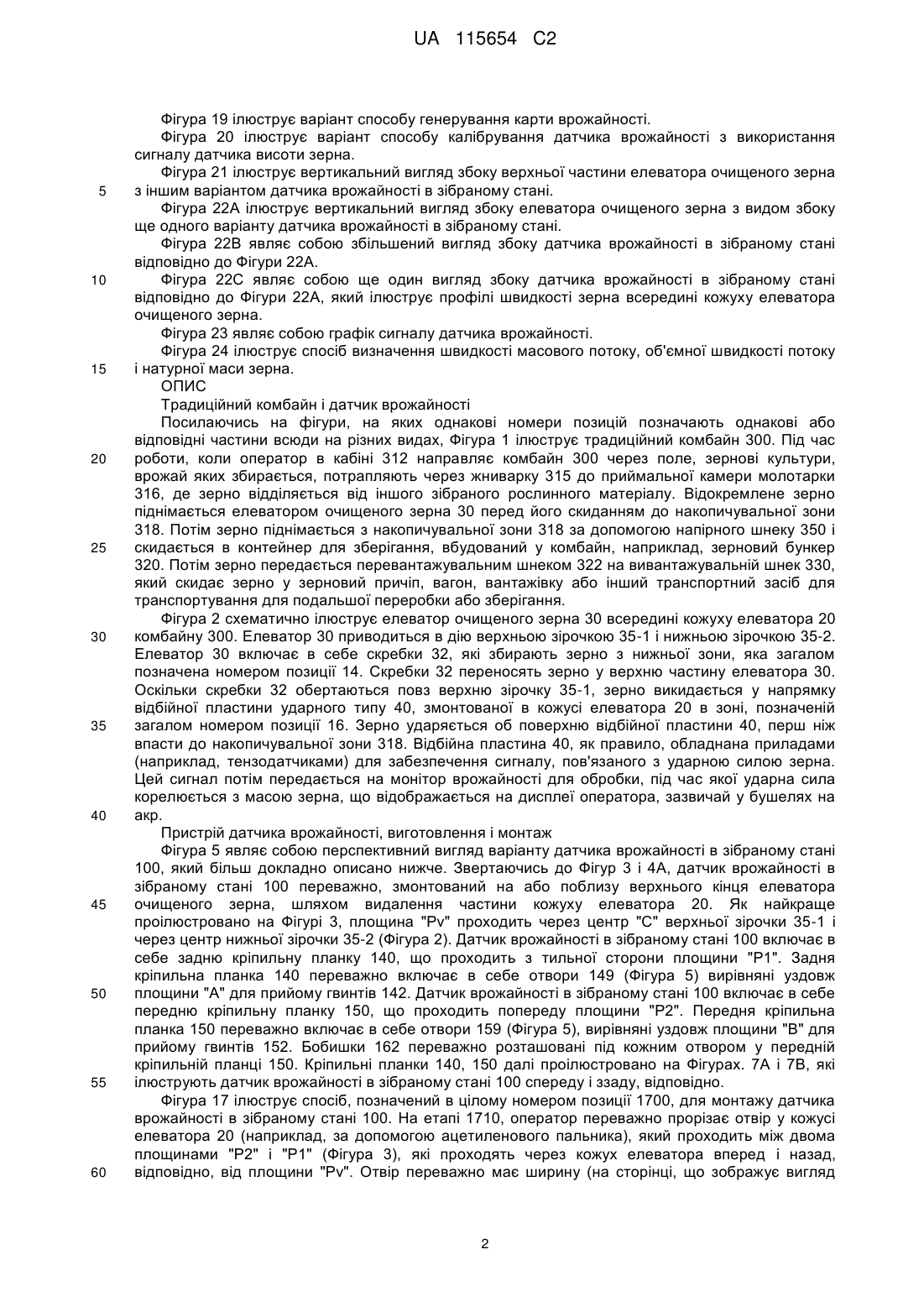
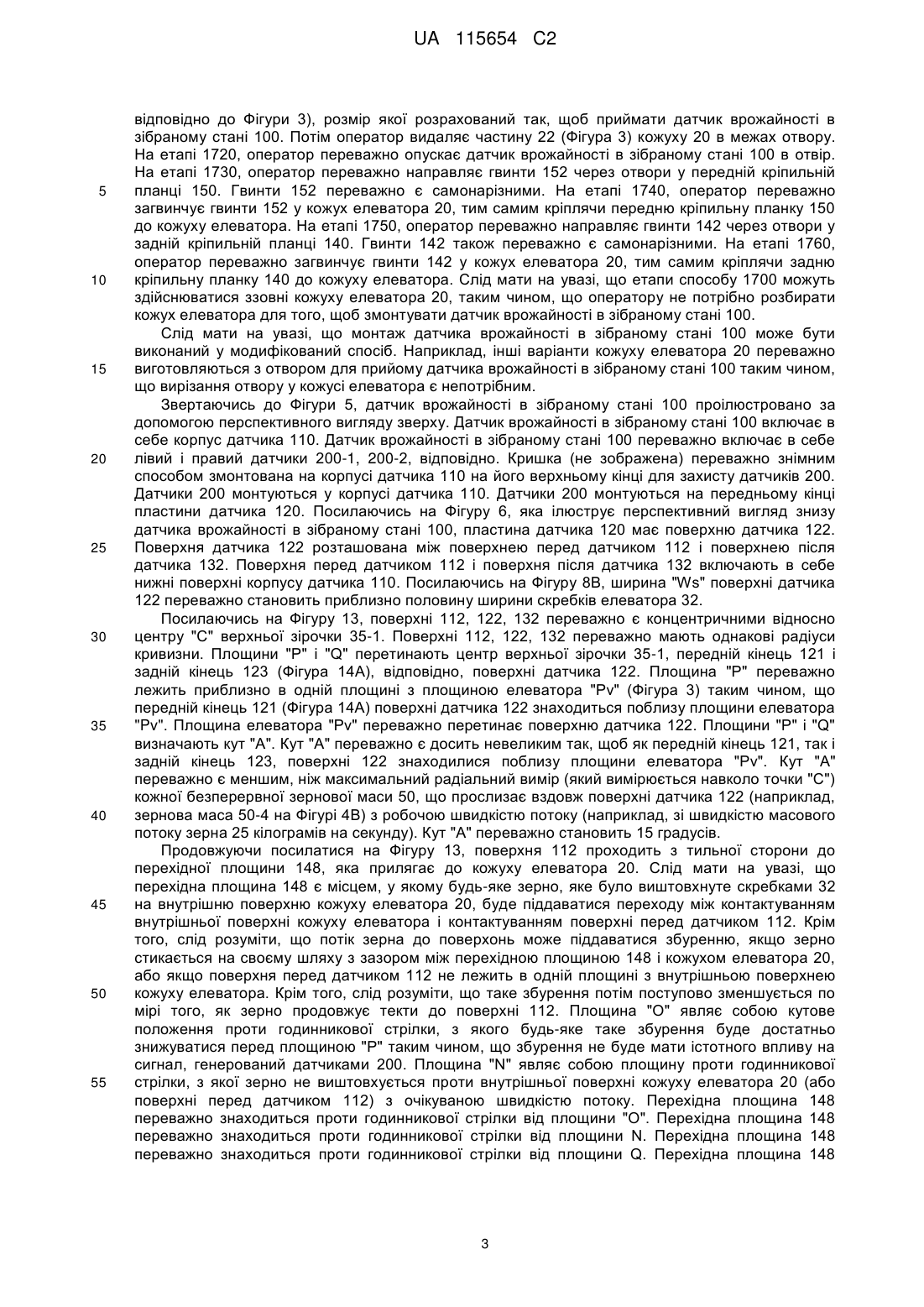
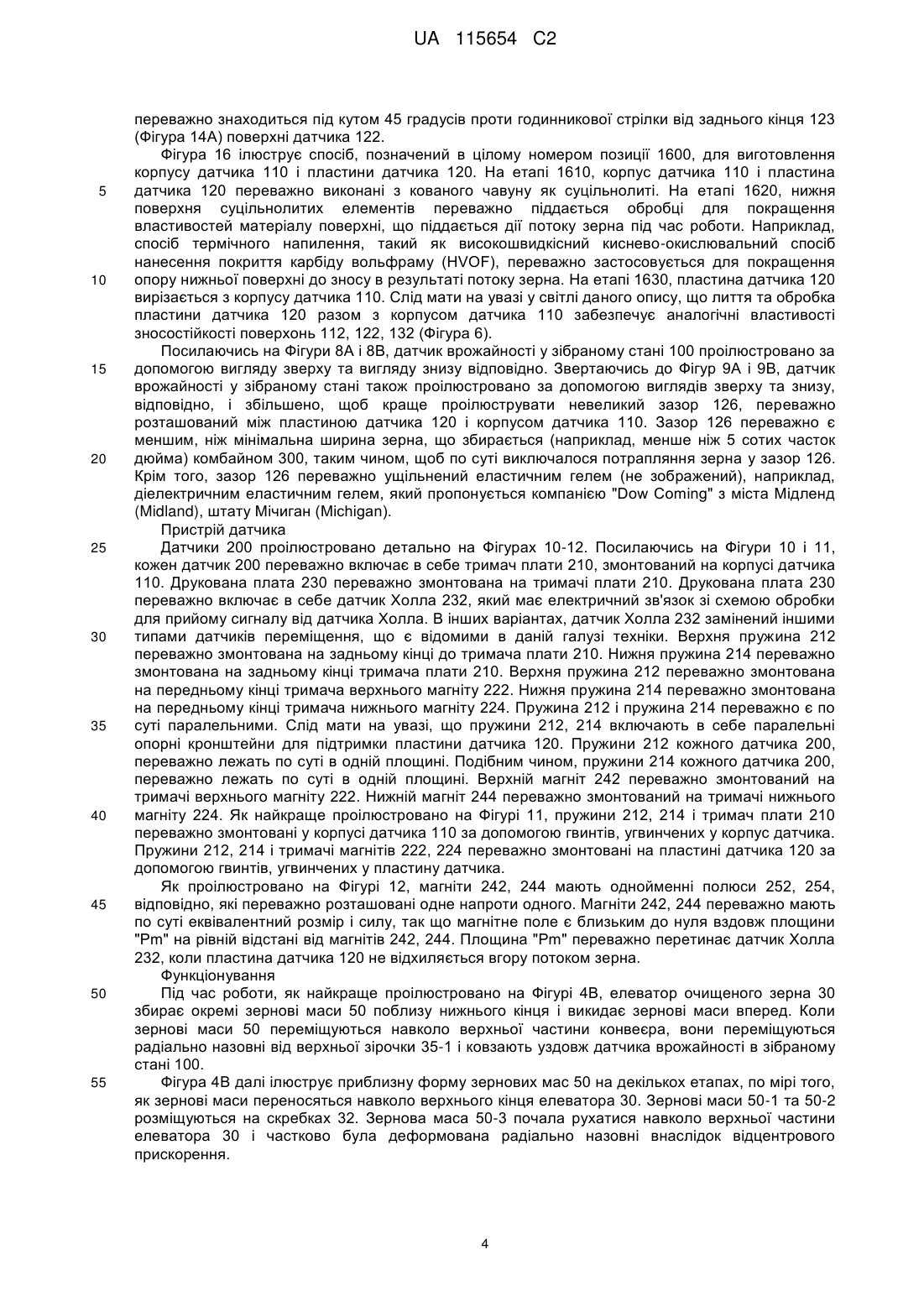
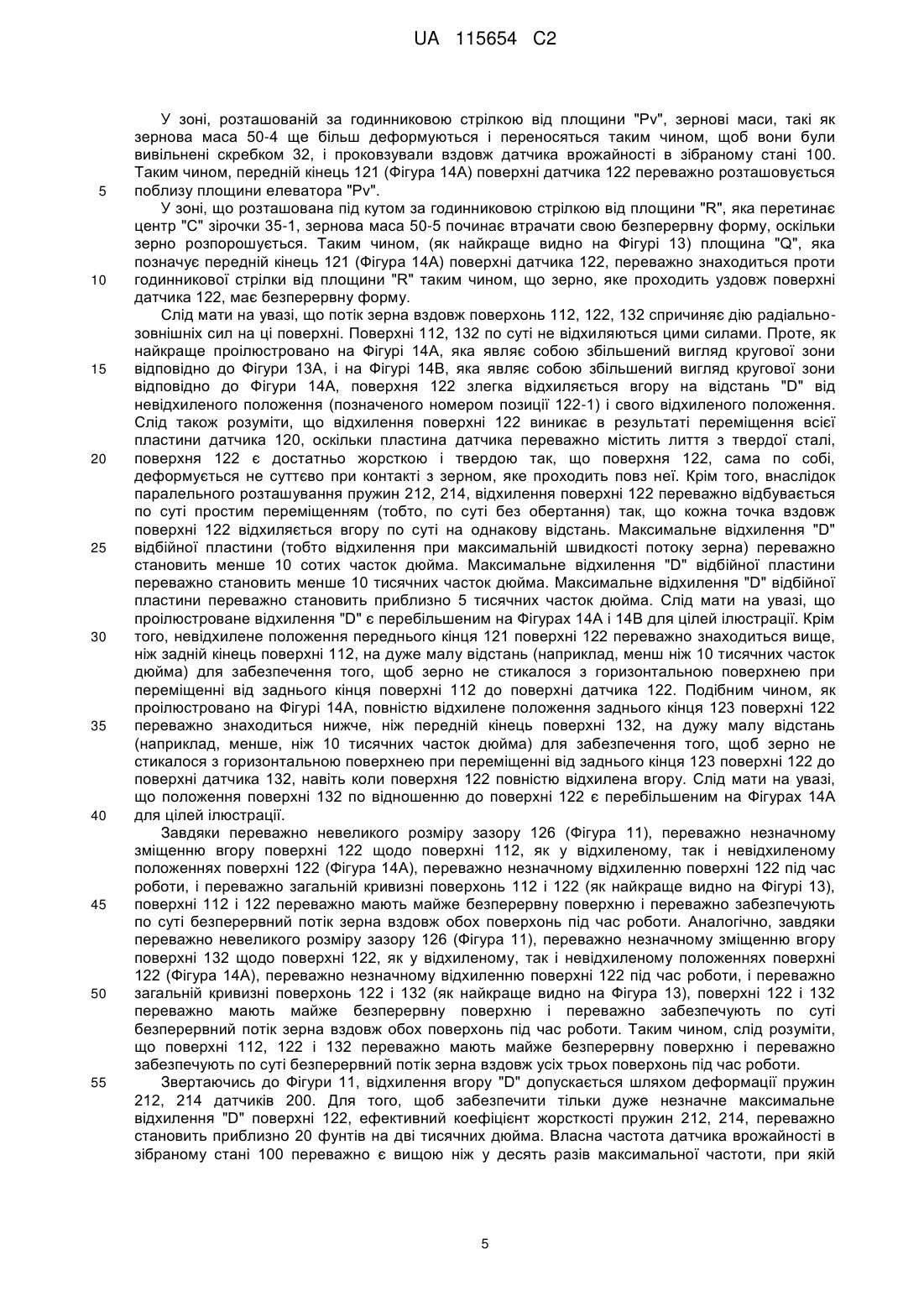
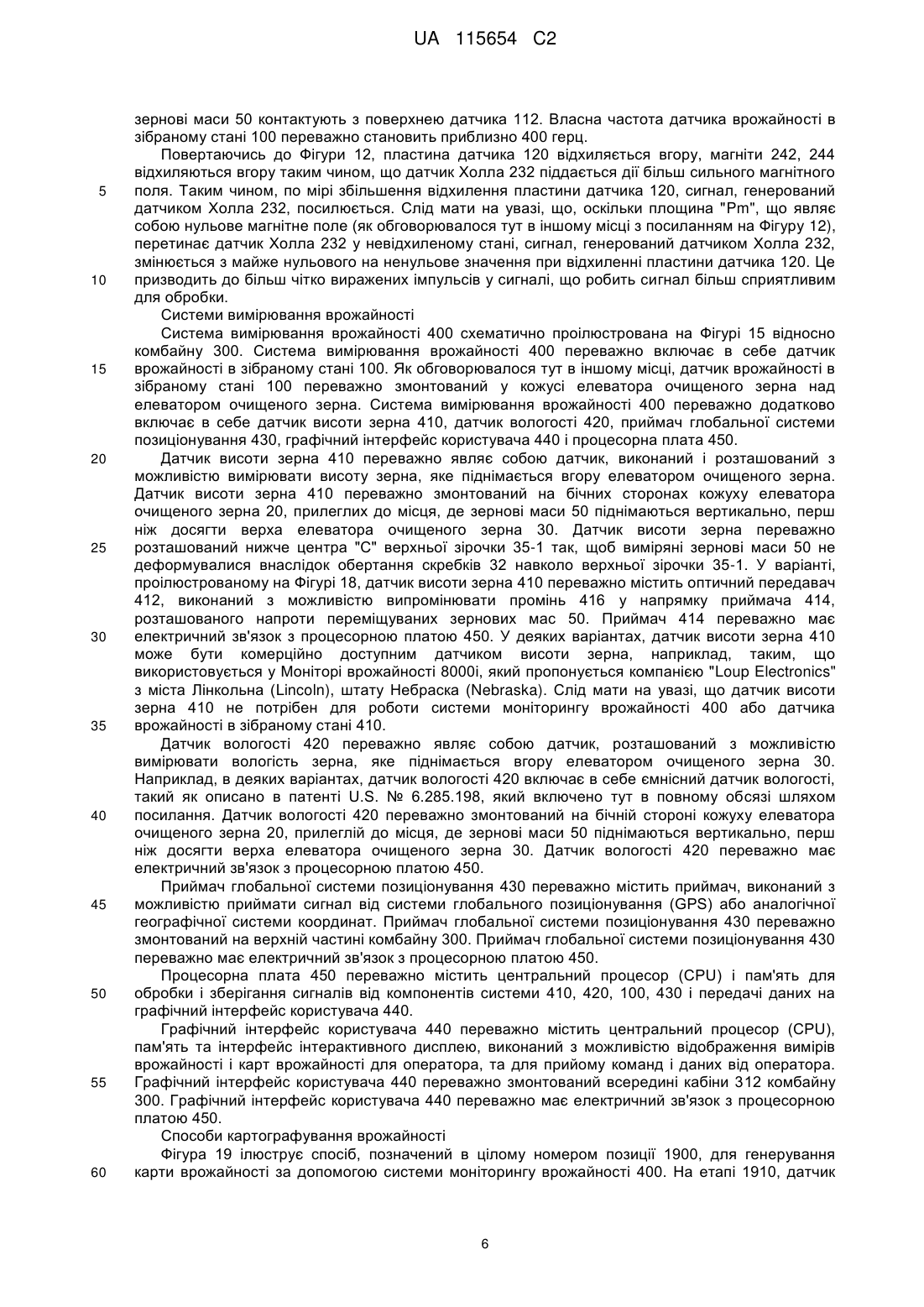
Реферат: Пропонуються пристрій, системи і способи моніторингу врожайності під час збирання врожаю зернових сільськогосподарських культур. UA 115654 C2 (12) UA 115654 C2 UA 115654 C2 5 10 15 20 25 30 35 40 45 50 55 60 ПЕРЕДУМОВИ ВИНАХОДУ Оперативний моніторинг врожайності або моніторинг врожайності в режимі реального часу під час збирання врожаю сільськогосподарських культур є відомим у даній галузі техніки. Один з типів комерційно доступних моніторів врожайності використовує датчик масового потоку ударного типу, як описано в патенті U.S. № 5343761, що включено тут у повному обсязі шляхом посилання. Хоча такі монітори, як правило, здатні вказувати відносну швидкість масового потоку на комбайні під збирання врожаю, вони є відомими, по суті, своєю неточністю. Оскільки зацікавленість та ринкові інвестиції у практики ведення сільського господарства, характерні для певних місцевих умов (наприклад, посів зі змінною нормою внесення та способи внесення речовин під сільськогосподарські культури), підвищуються, потреба у точному вимірюванні врожайності (наприклад, для генерування точних просторових карт врожайності шляхом асоціювання вимірів врожайності з певними ділянками, місцезнаходження яких прокладається за допомогою GPS) набуває все більшої актуальності. Таким чином, існує потреба у пристрої, системі і способах точного вимірювання швидкості масового потоку зерна під час збирання врожаю. КОРОТКИЙ ОПИС ФІГУР Фігура 1 являє собою вертикальний вигляд збоку традиційного комбайна. Фігура 2 ілюструє традиційний елеватор очищеного зерна ударного типу з традиційною відбійною пластиною для зерна ударного типу. Фігура 3 являє собою збільшений вигляд верхньої частини елеватора очищеного зерна відповідно до Фігури 2, який ілюструє переважні площини для видалення частини кожуху елеватора очищеного зерна і випускні отвори у кожусі елеватора для монтажу датчика врожайності у зібраному стані. Фігура 4А ілюструє ту ж саму частину елеватора очищеного зерна відповідно до Фігури 3 з одним варіантом змонтованого датчика врожайності в зібраному стані. Фігура 4B ілюструє зерно, яке вилітає з-під скребків елеватора на датчик врожайності в зібраному стані відповідно до Фігури 4А. Фігура 5 являє собою перспективний вигляд зверху варіанту датчика врожайності в зібраному стані відповідно до Фігури 4А. Фігура 6 являє собою перспективний вигляд знизу датчика врожайності в зібраному стані відповідно до Фігури 5. Фігура 7А являє собою вертикальний вигляд спереду датчика врожайності в зібраному стані відповідно до Фігури 5. Фігура 7B являє собою вертикальний вигляд ззаду датчика врожайності в зібраному стані відповідно до Фігури 5. Фігура 8А являє собою вигляд зверху датчика врожайності в зібраному стані відповідно до Фігури 5. Фігура 8В являє собою вигляд знизу датчика врожайності в зібраному стані відповідно до Фігури 5. Фігура 9А являє собою збільшений частковий вигляд зверху датчика врожайності в зібраному стані відповідно до Фігури 5. Фігура 9В являє собою збільшений частковий вигляд знизу датчика врожайності в зібраному стані відповідно до Фігури 5. Фігура 10 являє собою частковий вигляд у поперечному розрізі датчика врожайності в зібраному стані, при розгляді уздовж ліній 10-10 відповідно до Фігури 8B. Фігура 11 являє собою частковий вигляд у поперечному розрізі датчика врожайності в зібраному стані, при розгляді уздовж ліній 11-11 відповідно до Фігури 8А. Фігура 12 являє собою збільшений частковий вигляд кругових зон відповідно до Фігури 11. Фігура 13 являє собою вигляд у поперечному розрізі датчика врожайності в зібраному стані уздовж ліній 13-13 відповідно до Фігури 8А. Фігура 14А являє собою збільшений вигляд кругової зони відповідно до Фігури 13, який ілюструє відхилення пластини датчика. Фігура 14В являє собою збільшений вигляд кругової зони відповідно до Фігури 14А. Фігура 15 схематично ілюструє систему моніторингу врожайності. Фігура 16 ілюструє варіант способу виготовлення корпусу датчика врожайності відповідно до Фігури 5. Фігура 17 ілюструє варіант способу монтажу датчика врожайності в зібраному стані відповідно до Фігури 5 у кожусі елеватора очищеного зерна. Фігура 18 являє собою вигляд ззаду з частковим розрізом кожуху елеватора очищеного зерна, який включає в себе варіант датчика висоти зерна. 1 UA 115654 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фігура 19 ілюструє варіант способу генерування карти врожайності. Фігура 20 ілюструє варіант способу калібрування датчика врожайності з використання сигналу датчика висоти зерна. Фігура 21 ілюструєвертикальний вигляд збоку верхньої частини елеватора очищеного зерна з іншим варіантом датчика врожайності в зібраному стані. Фігура 22А ілюструє вертикальний вигляд збоку елеватора очищеного зерна з видом збоку ще одного варіанту датчика врожайності в зібраному стані. Фігура 22B являє собою збільшений вигляд збоку датчика врожайності в зібраному стані відповідно до Фігури 22А. Фігура 22С являє собою ще один вигляд збоку датчика врожайності в зібраному стані відповідно до Фігури 22А, який ілюструє профілі швидкості зерна всередині кожуху елеватора очищеного зерна. Фігура 23 являє собою графік сигналу датчика врожайності. Фігура 24 ілюструє спосіб визначення швидкості масового потоку, об'ємної швидкості потоку і натурної маси зерна. ОПИС Традиційний комбайн і датчик врожайності Посилаючись на фігури, на яких однакові номери позицій позначають однакові або відповідні частини всюди на різних видах, Фігура 1 ілюструє традиційний комбайн 300. Під час роботи, коли оператор в кабіні 312 направляє комбайн 300 через поле, зернові культури, врожай яких збирається, потрапляють через жниварку 315 до приймальної камери молотарки 316, де зерно відділяється від іншого зібраного рослинного матеріалу. Відокремлене зерно піднімається елеватором очищеного зерна 30 перед його скиданням до накопичувальної зони 318. Потім зерно піднімається з накопичувальної зони 318 за допомогою напірного шнеку 350 і скидається в контейнер для зберігання, вбудований у комбайн, наприклад, зерновий бункер 320. Потім зерно передається перевантажувальним шнеком 322 на вивантажувальній шнек 330, який скидає зерно у зерновий причіп, вагон, вантажівку або інший транспортний засіб для транспортування для подальшої переробки або зберігання. Фігура 2 схематично ілюструє елеватор очищеного зерна 30 всередині кожуху елеватора 20 комбайну 300. Елеватор 30 приводиться в дію верхньою зірочкою 35-1 і нижньою зірочкою 35-2. Елеватор 30 включає в себе скребки 32, які збирають зерно з нижньої зони, яка загалом позначена номером позиції 14. Скребки 32 переносять зерно у верхню частину елеватора 30. Оскільки скребки 32 обертаються повз верхню зірочку 35-1, зерно викидається у напрямку відбійної пластини ударного типу 40, змонтованої в кожусі елеватора 20 в зоні, позначеній загалом номером позиції 16. Зерно ударяється об поверхню відбійної пластини 40, перш ніж впасти до накопичувальної зони 318. Відбійна пластина 40, як правило, обладнана приладами (наприклад, тензодатчиками) для забезпечення сигналу, пов'язаного з ударною силою зерна. Цей сигнал потім передається на монітор врожайності для обробки, під час якої ударна сила корелюється з масою зерна, що відображається на дисплеї оператора, зазвичай у бушелях на акр. Пристрій датчика врожайності, виготовлення і монтаж Фігура 5 являє собою перспективний вигляд варіанту датчика врожайності в зібраному стані 100, який більш докладно описано нижче. Звертаючись до Фігур 3 і 4А, датчик врожайності в зібраному стані 100 переважно, змонтований на або поблизу верхнього кінця елеватора очищеного зерна, шляхом видалення частини кожуху елеватора 20. Як найкраще проілюстровано на Фігурі 3, площина "Pv" проходить через центр "С" верхньої зірочки 35-1 і через центр нижньої зірочки 35-2 (Фігура 2). Датчик врожайності в зібраному стані 100 включає в себе задню кріпильну планку 140, що проходить з тильної сторони площини "P1". Задня кріпильна планка 140 переважно включає в себе отвори 149 (Фігура 5) вирівняні уздовж площини "А" для прийому гвинтів 142. Датчик врожайності в зібраному стані 100 включає в себе передню кріпильну планку 150, що проходить попереду площини "Р2". Передня кріпильна планка 150 переважно включає в себе отвори 159 (Фігура 5), вирівняні уздовж площини "B" для прийому гвинтів 152. Бобишки 162 переважно розташовані під кожним отвором у передній кріпильній планці 150. Кріпильні планки 140, 150 далі проілюстровано на Фігурах. 7A і 7B, які ілюструють датчик врожайності в зібраному стані 100 спереду і ззаду, відповідно. Фігура 17 ілюструє спосіб, позначений в цілому номером позиції 1700, для монтажу датчика врожайності в зібраному стані 100. На етапі 1710, оператор переважно прорізає отвір у кожусі елеватора 20 (наприклад, за допомогою ацетиленового пальника), який проходить між двома площинами "P2" і "P1" (Фігура 3), які проходять через кожух елеватора вперед і назад, відповідно, від площини "Pv". Отвір переважно має ширину (на сторінці, що зображує вигляд 2 UA 115654 C2 5 10 15 20 25 30 35 40 45 50 55 відповідно до Фігури 3), розмір якої розрахований так, щоб приймати датчик врожайності в зібраному стані 100. Потім оператор видаляє частину 22 (Фігура 3) кожуху 20 в межах отвору. На етапі 1720, оператор переважно опускає датчик врожайності в зібраному стані 100 в отвір. На етапі 1730, оператор переважно направляє гвинти 152 через отвори у передній кріпильній планці 150. Гвинти 152 переважно є самонарізними. На етапі 1740, оператор переважно загвинчує гвинти 152 у кожух елеватора 20, тим самим кріплячи передню кріпильну планку 150 до кожуху елеватора. На етапі 1750, оператор переважно направляє гвинти 142 через отвори у задній кріпильній планці 140. Гвинти 142 також переважно є самонарізними. На етапі 1760, оператор переважно загвинчує гвинти 142 у кожух елеватора 20, тим самим кріплячи задню кріпильну планку 140 до кожуху елеватора. Слід мати на увазі, що етапи способу 1700 можуть здійснюватися ззовні кожуху елеватора 20, таким чином, що оператору не потрібно розбирати кожух елеватора для того, щоб змонтувати датчик врожайності в зібраному стані 100. Слід мати на увазі, що монтаж датчика врожайності в зібраному стані 100 може бути виконаний у модифікований спосіб. Наприклад, інші варіанти кожуху елеватора 20 переважно виготовляються з отвором для прийому датчика врожайності в зібраному стані 100 таким чином, що вирізання отвору у кожусі елеватора є непотрібним. Звертаючись до Фігури 5, датчик врожайності в зібраному стані 100 проілюстровано за допомогою перспективного вигляду зверху. Датчик врожайності в зібраному стані 100 включає в себе корпус датчика 110. Датчик врожайності в зібраному стані 100 переважно включає в себе лівий і правий датчики 200-1, 200-2, відповідно. Кришка (не зображена) переважно знімним способом змонтована на корпусі датчика 110 на його верхньому кінці для захисту датчиків 200. Датчики 200 монтуються у корпусі датчика 110. Датчики 200 монтуються на передньому кінці пластини датчика 120. Посилаючись на Фігуру 6, яка ілюструє перспективний вигляд знизу датчика врожайності в зібраному стані 100, пластина датчика 120 має поверхню датчика 122. Поверхня датчика 122 розташована між поверхнею перед датчиком 112 і поверхнею після датчика 132. Поверхня перед датчиком 112 і поверхня після датчика 132 включають в себе нижні поверхні корпусу датчика 110. Посилаючись на Фігуру 8B, ширина "Ws" поверхні датчика 122 переважно становить приблизно половину ширини скребків елеватора 32. Посилаючись на Фігуру 13, поверхні 112, 122, 132 переважно є концентричними відносно центру "С" верхньої зірочки 35-1. Поверхні 112, 122, 132 переважно мають однакові радіуси кривизни. Площини "P" і "Q" перетинають центр верхньої зірочки 35-1, передній кінець 121 і задній кінець 123 (Фігура 14А), відповідно, поверхні датчика 122. Площина "Р" переважно лежить приблизно в одній площині з площиною елеватора "Pv" (Фігура 3) таким чином, що передній кінець 121 (Фігура 14А) поверхні датчика 122 знаходиться поблизу площини елеватора "Pv". Площина елеватора "Pv" переважно перетинає поверхню датчика 122. Площини "P" і "Q" визначають кут "A". Кут "А" переважно є досить невеликим так, щоб як передній кінець 121, так і задній кінець 123, поверхні 122 знаходилися поблизу площини елеватора "Pv". Кут "А" переважно є меншим, ніж максимальний радіальний вимір (який вимірюється навколо точки "С") кожної безперервної зернової маси 50, що прослизає вздовж поверхні датчика 122 (наприклад, зернова маса 50-4 на Фігурі 4B) з робочою швидкістю потоку (наприклад, зі швидкістю масового потоку зерна 25 кілограмів на секунду). Кут "А" переважно становить 15 градусів. Продовжуючи посилатися на Фігуру 13, поверхня 112 проходить з тильної сторони до перехідної площини 148, яка прилягає до кожуху елеватора 20. Слід мати на увазі, що перехідна площина 148 є місцем, у якому будь-яке зерно, яке було виштовхнуте скребками 32 на внутрішню поверхню кожуху елеватора 20, буде піддаватися переходу між контактуванням внутрішньої поверхні кожуху елеватора і контактуванням поверхні перед датчиком 112. Крім того, слід розуміти, що потік зерна до поверхонь може піддаватися збуренню, якщо зерно стикається на своєму шляху з зазором між перехідною площиною 148 і кожухом елеватора 20, або якщо поверхня перед датчиком 112 не лежить в одній площині з внутрішньою поверхнею кожуху елеватора. Крім того, слід розуміти, що таке збурення потім поступово зменшується по мірі того, як зерно продовжує текти до поверхні 112. Площина "O" являє собою кутове положення проти годинникової стрілки, з якого будь-яке таке збурення буде достатньо знижуватися перед площиною "Р" таким чином, що збурення не буде мати істотного впливу на сигнал, генерований датчиками 200. Площина "N" являє собою площину проти годинникової стрілки, з якої зерно не виштовхується проти внутрішньої поверхні кожуху елеватора 20 (або поверхні перед датчиком 112) з очікуваною швидкістю потоку. Перехідна площина 148 переважно знаходиться проти годинникової стрілки від площини "О". Перехідна площина 148 переважно знаходиться проти годинникової стрілки від площини N. Перехідна площина 148 переважно знаходиться проти годинникової стрілки від площини Q. Перехідна площина 148 3 UA 115654 C2 5 10 15 20 25 30 35 40 45 50 55 переважно знаходиться під кутом 45 градусів проти годинникової стрілки від заднього кінця 123 (Фігура 14А) поверхні датчика 122. Фігура 16 ілюструє спосіб, позначений в цілому номером позиції 1600, для виготовлення корпусу датчика 110 і пластини датчика 120. На етапі 1610, корпус датчика 110 і пластина датчика 120 переважно виконані з кованого чавуну як суцільнолиті. На етапі 1620, нижня поверхня суцільнолитих елементів переважно піддається обробці для покращення властивостей матеріалу поверхні, що піддається дії потоку зерна під час роботи. Наприклад, спосіб термічного напилення, такий як високошвидкісний киснево-окислювальний спосіб нанесення покриття карбіду вольфраму (HVOF), переважно застосовується для покращення опору нижньої поверхні до зносу в результаті потоку зерна. На етапі 1630, пластина датчика 120 вирізається з корпусу датчика 110. Слід мати на увазі у світлі даного опису, що лиття та обробка пластини датчика 120 разом з корпусом датчика 110 забезпечує аналогічні властивості зносостійкості поверхонь 112, 122, 132 (Фігура 6). Посилаючись на Фігури 8А і 8В, датчик врожайності у зібраному стані 100 проілюстровано за допомогою вигляду зверху та вигляду знизу відповідно. Звертаючись до Фігур 9А і 9В, датчик врожайності у зібраному стані також проілюстровано за допомогою виглядів зверху та знизу, відповідно, і збільшено, щоб краще проілюструвати невеликий зазор 126, переважно розташований між пластиною датчика 120 і корпусом датчика 110. Зазор 126 переважно є меншим, ніж мінімальна ширина зерна, що збирається (наприклад, менше ніж 5 сотих часток дюйма) комбайном 300, таким чином, щоб по суті виключалося потрапляння зерна у зазор 126. Крім того, зазор 126 переважно ущільнений еластичним гелем (не зображений), наприклад, діелектричним еластичним гелем, який пропонується компанією "Dow Coming" з міста Мідленд (Midland), штату Мічиган (Michigan). Пристрій датчика Датчики 200 проілюстровано детально на Фігурах 10-12. Посилаючись на Фігури 10 і 11, кожен датчик 200 переважно включає в себе тримач плати 210, змонтований на корпусі датчика 110. Друкована плата 230 переважно змонтована на тримачі плати 210. Друкована плата 230 переважно включає в себе датчик Холла 232, який має електричний зв'язок зі схемою обробки для прийому сигналу від датчика Холла. В інших варіантах, датчик Холла 232 замінений іншими типами датчиків переміщення, що є відомими в даній галузі техніки. Верхня пружина 212 переважно змонтована на задньому кінці до тримача плати 210. Нижня пружина 214 переважно змонтована на задньому кінці тримача плати 210. Верхня пружина 212 переважно змонтована на передньому кінці тримача верхнього магніту 222. Нижня пружина 214 переважно змонтована на передньому кінці тримача нижнього магніту 224. Пружина 212 і пружина 214 переважно є по суті паралельними. Слід мати на увазі, що пружини 212, 214 включають в себе паралельні опорні кронштейни для підтримки пластини датчика 120. Пружини 212 кожного датчика 200, переважно лежать по суті в одній площині. Подібним чином, пружини 214 кожного датчика 200, переважно лежать по суті в одній площині. Верхній магніт 242 переважно змонтований на тримачі верхнього магніту 222. Нижній магніт 244 переважно змонтований на тримачі нижнього магніту 224. Як найкраще проілюстровано на Фігурі 11, пружини 212, 214 і тримач плати 210 переважно змонтовані у корпусі датчика 110 за допомогою гвинтів, угвинчених у корпус датчика. Пружини 212, 214 і тримачі магнітів 222, 224 переважно змонтовані на пластині датчика 120 за допомогою гвинтів, угвинчених у пластину датчика. Як проілюстровано на Фігурі 12, магніти 242, 244 мають однойменні полюси 252, 254, відповідно, які переважно розташовані одне напроти одного. Магніти 242, 244 переважно мають по суті еквівалентний розмір і силу, так що магнітне поле є близьким до нуля вздовж площини "Pm" на рівній відстані від магнітів 242, 244. Площина "Pm" переважно перетинає датчик Холла 232, коли пластина датчика 120 не відхиляється вгору потоком зерна. Функціонування Під час роботи, як найкраще проілюстровано на Фігурі 4В, елеватор очищеного зерна 30 збирає окремі зернові маси 50 поблизу нижнього кінця і викидає зернові маси вперед. Коли зернові маси 50 переміщуються навколо верхньої частини конвеєра, вони переміщуються радіально назовні від верхньої зірочки 35-1 і ковзають уздовж датчика врожайності в зібраному стані 100. Фігура 4B далі ілюструє приблизну форму зернових мас 50 на декількох етапах, по мірі того, як зернові маси переносяться навколо верхнього кінця елеватора 30. Зернові маси 50-1 та 50-2 розміщуються на скребках 32. Зернова маса 50-3 почала рухатися навколо верхньої частини елеватора 30 і частково була деформована радіально назовні внаслідок відцентрового прискорення. 4 UA 115654 C2 5 10 15 20 25 30 35 40 45 50 55 У зоні, розташованій за годинниковою стрілкою від площини "Pv", зернові маси, такі як зернова маса 50-4 ще більш деформуються і переносяться таким чином, щоб вони були вивільнені скребком 32, і проковзували вздовж датчика врожайності в зібраному стані 100. Таким чином, передній кінець 121 (Фігура 14А) поверхні датчика 122 переважно розташовується поблизу площини елеватора "Pv". У зоні, що розташована під кутом за годинниковою стрілкою від площини "R", яка перетинає центр "С" зірочки 35-1, зернова маса 50-5 починає втрачати свою безперервну форму, оскільки зерно розпорошується. Таким чином, (як найкраще видно на Фігурі 13) площина "Q", яка позначує передній кінець 121 (Фігура 14А) поверхні датчика 122, переважно знаходиться проти годинникової стрілки від площини "R" таким чином, що зерно, яке проходить уздовж поверхні датчика 122, має безперервну форму. Слід мати на увазі, що потік зерна вздовж поверхонь 112, 122, 132 спричиняє дію радіальнозовнішніх сил на ці поверхні. Поверхні 112, 132 по суті не відхиляються цими силами. Проте, як найкраще проілюстровано на Фігурі 14A, яка являє собою збільшений вигляд кругової зони відповідно до Фігури 13А, і на Фігурі 14В, яка являє собою збільшений вигляд кругової зони відповідно до Фігури 14А, поверхня 122 злегка відхиляється вгору на відстань "D" від невідхиленого положення (позначеного номером позиції 122-1) і свого відхиленого положення. Слід також розуміти, що відхилення поверхні 122 виникає в результаті переміщення всієї пластини датчика 120, оскільки пластина датчика переважно містить лиття з твердої сталі, поверхня 122 є достатньо жорсткою і твердою так, що поверхня 122, сама по собі, деформується не суттєво при контакті з зерном, яке проходить повз неї. Крім того, внаслідок паралельного розташування пружин 212, 214, відхилення поверхні 122 переважно відбувається по суті простим переміщенням (тобто, по суті без обертання) так, що кожна точка вздовж поверхні 122 відхиляється вгору по суті на однакову відстань. Максимальне відхилення "D" відбійної пластини (тобто відхилення при максимальній швидкості потоку зерна) переважно становить менше 10 сотих часток дюйма. Максимальне відхилення "D" відбійної пластини переважно становить менше 10 тисячних часток дюйма. Максимальне відхилення "D" відбійної пластини переважно становить приблизно 5 тисячних часток дюйма. Слід мати на увазі, що проілюстроване відхилення "D" є перебільшеним на Фігурах 14А і 14В для цілей ілюстрації. Крім того, невідхилене положення переднього кінця 121 поверхні 122 переважно знаходиться вище, ніж задній кінець поверхні 112, на дуже малу відстань (наприклад, менш ніж 10 тисячних часток дюйма) для забезпечення того, щоб зерно не стикалося з горизонтальною поверхнею при переміщенні від заднього кінця поверхні 112 до поверхні датчика 122. Подібним чином, як проілюстровано на Фігурі 14А, повністю відхилене положення заднього кінця 123 поверхні 122 переважно знаходиться нижче, ніж передній кінець поверхні 132, на дужу малу відстань (наприклад, менше, ніж 10 тисячних часток дюйма) для забезпечення того, щоб зерно не стикалося з горизонтальною поверхнею при переміщенні від заднього кінця 123 поверхні 122 до поверхні датчика 132, навіть коли поверхня 122 повністю відхилена вгору. Слід мати на увазі, що положення поверхні 132 по відношенню до поверхні 122 є перебільшеним на Фігурах 14А для цілей ілюстрації. Завдяки переважно невеликого розміру зазору 126 (Фігура 11), переважно незначному зміщенню вгору поверхні 122 щодо поверхні 112, як у відхиленому, так і невідхиленому положеннях поверхні 122 (Фігура 14А), переважно незначному відхиленню поверхні 122 під час роботи, і переважно загальній кривизні поверхонь 112 і 122 (як найкраще видно на Фігурі 13), поверхні 112 і 122 переважно мають майже безперервну поверхню і переважно забезпечують по суті безперервний потік зерна вздовж обох поверхонь під час роботи. Аналогічно, завдяки переважно невеликого розміру зазору 126 (Фігура 11), переважно незначному зміщенню вгору поверхні 132 щодо поверхні 122, як у відхиленому, так і невідхиленому положеннях поверхні 122 (Фігура 14А), переважно незначному відхиленню поверхні 122 під час роботи, і переважно загальній кривизні поверхонь 122 і 132 (як найкраще видно на Фігура 13), поверхні 122 і 132 переважно мають майже безперервну поверхню і переважно забезпечують по суті безперервний потік зерна вздовж обох поверхонь під час роботи. Таким чином, слід розуміти, що поверхні 112, 122 і 132 переважно мають майже безперервну поверхню і переважно забезпечують по суті безперервний потік зерна вздовж усіх трьох поверхонь під час роботи. Звертаючись до Фігури 11, відхилення вгору "D" допускається шляхом деформації пружин 212, 214 датчиків 200. Для того, щоб забезпечити тільки дуже незначне максимальне відхилення "D" поверхні 122, ефективний коефіцієнт жорсткості пружин 212, 214, переважно становить приблизно 20 фунтів на дві тисячних дюйма. Власна частота датчика врожайності в зібраному стані 100 переважно є вищою ніж у десять разів максимальної частоти, при якій 5 UA 115654 C2 5 10 15 20 25 30 35 40 45 50 55 60 зернові маси 50 контактують з поверхнею датчика 112. Власна частота датчика врожайності в зібраному стані 100 переважно становить приблизно 400 герц. Повертаючись до Фігури 12, пластина датчика 120 відхиляється вгору, магніти 242, 244 відхиляються вгору таким чином, що датчик Холла 232 піддається дії більш сильного магнітного поля. Таким чином, по мірі збільшення відхилення пластини датчика 120, сигнал, генерований датчиком Холла 232, посилюється. Слід мати на увазі, що, оскільки площина "Pm", що являє собою нульове магнітне поле (як обговорювалося тут в іншому місці з посиланням на Фігуру 12), перетинає датчик Холла 232 у невідхиленому стані, сигнал, генерований датчиком Холла 232, змінюється з майже нульового на ненульове значення при відхиленні пластини датчика 120. Це призводить до більш чітко виражених імпульсів у сигналі, що робить сигнал більш сприятливим для обробки. Системи вимірювання врожайності Система вимірювання врожайності 400 схематично проілюстрована на Фігурі 15 відносно комбайну 300. Система вимірювання врожайності 400 переважно включає в себе датчик врожайності в зібраному стані 100. Як обговорювалося тут в іншому місці, датчик врожайності в зібраному стані 100 переважно змонтований у кожусі елеватора очищеного зерна над елеватором очищеного зерна. Система вимірювання врожайності 400 переважно додатково включає в себе датчик висоти зерна 410, датчик вологості 420, приймач глобальної системи позиціонування 430, графічний інтерфейс користувача 440 і процесорна плата 450. Датчик висоти зерна 410 переважно являє собою датчик, виконаний і розташований з можливістю вимірювати висоту зерна, яке піднімається вгору елеватором очищеного зерна. Датчик висоти зерна 410 переважно змонтований на бічних сторонах кожуху елеватора очищеного зерна 20, прилеглих до місця, де зернові маси 50 піднімаються вертикально, перш ніж досягти верха елеватора очищеного зерна 30. Датчик висоти зерна переважно розташований нижче центра "С" верхньої зірочки 35-1 так, щоб виміряні зернові маси 50 не деформувалися внаслідок обертання скребків 32 навколо верхньої зірочки 35-1. У варіанті, проілюстрованому на Фігурі 18, датчик висоти зерна 410 переважно містить оптичний передавач 412, виконаний з можливістю випромінювати промінь 416 у напрямку приймача 414, розташованого напроти переміщуваних зернових мас 50. Приймач 414 переважно має електричний зв'язок з процесорною платою 450. У деяких варіантах, датчик висоти зерна 410 може бути комерційно доступним датчиком висоти зерна, наприклад, таким, що використовується у Моніторі врожайності 8000i, який пропонується компанією "Loup Electronics" з міста Лінкольна (Lincoln), штату Небраска (Nebraska). Слід мати на увазі, що датчик висоти зерна 410 не потрібен для роботи системи моніторингу врожайності 400 або датчика врожайності в зібраному стані 410. Датчик вологості 420 переважно являє собою датчик, розташований з можливістю вимірювати вологість зерна, яке піднімається вгору елеватором очищеного зерна 30. Наприклад, в деяких варіантах, датчик вологості 420 включає в себе ємнісний датчик вологості, такий як описано в патенті U.S. № 6.285.198, який включено тут в повному обсязі шляхом посилання. Датчик вологості 420 переважно змонтований на бічній стороні кожуху елеватора очищеного зерна 20, прилеглій до місця, де зернові маси 50 піднімаються вертикально, перш ніж досягти верха елеватора очищеного зерна 30. Датчик вологості 420 переважно має електричний зв'язок з процесорною платою 450. Приймач глобальної системи позиціонування 430 переважно містить приймач, виконаний з можливістю приймати сигнал від системи глобального позиціонування (GPS) або аналогічної географічної системи координат. Приймач глобальної системи позиціонування 430 переважно змонтований на верхній частині комбайну 300. Приймач глобальної системи позиціонування 430 переважно має електричний зв'язок з процесорною платою 450. Процесорна плата 450 переважно містить центральний процесор (CPU) і пам'ять для обробки і зберігання сигналів від компонентів системи 410, 420, 100, 430 і передачі даних на графічний інтерфейс користувача 440. Графічний інтерфейс користувача 440 переважно містить центральний процесор (CPU), пам'ять та інтерфейс інтерактивного дисплею, виконаний з можливістю відображення вимірів врожайності і карт врожайності для оператора, та для прийому команд і даних від оператора. Графічний інтерфейс користувача 440 переважно змонтований всередині кабіни 312 комбайну 300. Графічний інтерфейс користувача 440 переважно має електричний зв'язок з процесорною платою 450. Способи картографування врожайності Фігура 19 ілюструє спосіб, позначений в цілому номером позиції 1900, для генерування карти врожайності за допомогою системи моніторингу врожайності 400. На етапі 1910, датчик 6 UA 115654 C2 5 10 15 20 25 30 35 40 45 50 55 врожайності в зібраному стані 100 генерує сигнал для монітору врожайності, який переважно записується із позначкою часу на платі монітору врожайності 450. На етапі 1915, приймач глобальної системи позиціонування 430 (або датчик швидкості, такий як датчик швидкості Холла, змонтований на вісі, що є відомим в даній області техніки) переважно надсилає дані про швидкість збирання врожаю комбайном 300 на плату монітору врожайності 450, яка переважно записує із позначкою часу дані про швидкість. На етапі 1920, плата монітору врожайності 450 переважно обчислює локальну врожайність, наприклад, шляхом розрахунку швидкості масового потоку зерна та виведення локальної врожайності на основі швидкості масового потоку зерна з використанням, наприклад, швидкості комбайну 300 та ширини жниварки 315. На етапі 1930, приймач глобальної системи позиціонування 430 переважно надсилає дані про місцезнаходження (наприклад, координати глобального позиціонування), які відповідають положенню комбайну 300, на плату монітору врожайності 450, яка переважно записує із позначкою часу дані про місцезнаходження. На етапі 1940, датчик вологості 420 переважно надсилає дані про поточну вологість зерна на плату монітору врожайності 450, яка переважно обчислює скориговану локальну врожайність на основі вологості зерна. На етапі 1945, плата монітору врожайності 420 переважно асоціює записані місцеположення із даними про скореговану локальну врожайність, записаними у відповідний час. На етапі 1950, плата монітору врожайності 450 переважно надсилає дані про локальну врожайність і відповідне місцеположення на графічний інтерфейс користувача 440, і графічний інтерфейс користувача 440 генерує карту, що містить графічне зображення скоригованої локальної врожайності у певному місцеположенні. Способи калібрування монітору врожайності Фігура 20 ілюструє спосіб, позначений в цілому номером позиції 2000, для калібрування датчика врожайності з датчиком висоти зерна 410. На етапі 2010, датчик висоти зерна 410 генерує сигнал, що відноситься до кількості зерна на скребках 32, який переважно реєструється платою монітору врожайності 450. В інших варіантах, етап 2010 здійснюється за допомогою іншого датчика, виконаного з можливістю вимірювання кількості зерна, яке переробляється комбайном 300. На етапі 2020, датчик врожайності в зібраному стані 100 генерує сигнал для монітору врожайності, пов'язаний з силою зерна, що діє на поверхню датчика, при цьому сигнал переважно реєструється платою монітору врожайності 450. У деяких варіантах, етап 2020 здійснюється за допомогою датчика врожайності в зібраному стані, наприклад, такого як датчик врожайності в зібраному стані 100. В інших варіантах, етап 2020 здійснюється за допомогою відбійної пластини датчика врожайності ударного типу (наприклад, відбійної пластина ударного типу 40, як проілюстровано на Фігурі 2). На етапі 2030, плата монітору врожайності 450 переважно застосовує зсув у часі, або щодо сигналу монітору врожайності, або щодо сигналу висоти зерна, який відповідає часу між вимірюваннями датчика висоти зерна і датчика врожайності в зібраному стані. На етапі 2040, плата монітору врожайності 450 переважно порівнює характеристику сигналу датчика врожайності з такою ж характеристикою сигналу висоти зерна (наприклад, шляхом порівняння суми сигналу датчика врожайності із сумою сигналу висоти зерна за відповідні періоди). На етапі 2050, плата монітору врожайності 450 переважно визначає поправочний коефіцієнт на основі порівняння (наприклад, шляхом ділення суми сигналу висоти зерна на суму сигналу датчика врожайності за відповідні періоди). На етапі 2060, плата монітору врожайності 450 переважно застосовує поправочний коефіцієнт до сигналу датчика врожайності (наприклад, шляхом множення поправочного коефіцієнта на сигнал датчика врожайності) і надсилає скорегований сигнал датчика врожайності до графічного інтерфейсу користувача 440. Способи вимірювання натурної маси і об'ємної швидкості потоку зерна Системи вимірювання врожайності, які описано тут, переважно виконані з можливістю визначення об'ємної швидкості потоку зерна через елеватор очищеного зерна 30 на основі сигналу, що генерується датчиком врожайності під час операцій зі збирання врожаю. Звертаючись до Фігури 23, репрезентативний графік 2300 ілюструє сигнал 2310, генерований датчиком врожайності, коли зернові маси 50 ударяються об поверхню датчика. Базова напруга "Vb" являє собою сигнал, який видається, коли жодне зерно не контактує з поверхнею датчика. Середнє значення сигналу з плином часу представлене середньою напругою "Vave". Період сигналу "Тр" може визначатися шляхом вимірювання часової затримки між моментами першого перетину середньої напруги "Vave". Тривалість імпульсу "Pw" сигналу може визначатися шляхом вимірювання часової затримки між першим і другим перетинами середньої напруги "Vave". Слід мати на увазі у світлі даного опису, що, оскільки зернові маси на кожному скребку стиснуті по суті у дискретну, безперервну форму по відношенню до датчика 7 UA 115654 C2 5 10 15 20 25 30 35 40 45 50 55 врожайності, сигнал 2310 включає в себе дискретні імпульси, що мають вимірну тривалість імпульсу "Pw". Тривалість імпульсу "Pw" пов'язана із об'ємною швидкістю потоку зерна. Звертаючись до Фігури 24, проілюстровано спосіб 2400 для визначення швидкості масового потоку, об'ємної швидкості потоку та натурної маси зерна. На етапі 2405, зерно стискається у дискретну форму (наприклад, як проілюстровано на Фігурі 4В) шляхом зміни його напрямку уздовж поверхні (наприклад, внутрішньої поверхні кожуху 20 і поверхні датчика 122). На етапі 2410, етап етапу 2405 повторюється з дискретними, рознесеними інтервалами. На етапі 2415, дія сили зерна на поверхню вимірюється протягом періоду вибірки, в результаті чого формується сигнал, такий як сигнал 2310 на Фігурі 23. На етапі 2417, робоча швидкість конвеєра 30 переважно визначається, або окремим датчиком, таким як датчик положення валу, або шляхом його обчислення на основі періоду "Тр" сигналу, який є обернено пропорційним швидкості конвеєра. На етапі 2420, сили зерна інтегруються або підсумовуються за період вибірки шляхом множення суми напруги "V" на емпіричну постійну "k1", що пов'язує напругу зі швидкістю масового потоку. На етапі 2425, швидкість масового потоку "m" зерна визначається шляхом ділення суми сил зерна за період вибірки на тривалість "Т" періоду вибірки, наприклад, використовуючи співвідношення: Де: k2 є емпіричним зміщенням. На етапі 2427, вимір швидкості масового потоку, отриманий на етапі 2425 переважно коригується шляхом порівняння швидкості конвеєра з розрахунковою швидкістю і застосування поправочного коефіцієнта, пов'язаного із зазначеним порівнянням. На етапі 2430, швидкість масового потоку зерна переважно відображається на графічному інтерфейсі користувача 440. На етапі 2435, переважно вимірюють тривалість імпульсу "Pw" сигналу. На етапі 2440, об'ємна швидкість потоку F переважно обчислюється на основі тривалості імпульсу "Pw", наприклад, з використанням наступного співвідношення: Де: k3 і k4 є емпіричним множником і зміщенням, відповідно. На етапі 2445, натурна маса зерна переважно визначається шляхом ділення швидкості масового потоку зерна на об'ємну швидкість потоку і виконання будь-яких додаткових математичних операцій, необхідних для отримання стандартизованої натурної маси. Слід мати на увазі, що стандартна натурна маса (наприклад, кукурудзи) являє собою вагу у фунтах бушеля (1,244 кубічних футів) зернової культури. На етапі 2450, натурна маса переважно відображається для оператора на моніторі. Альтернативні варіанти датчика врожайності Фігура 21 ілюструє альтернативний датчик врожайності 2195. Датчик врожайності 2195 містить деформований лист 2110, що має закріплений кінець, змонтований у кожусі 20 вище вершини елеватора 30, і вільний кінець, розташований нижче закріпленого кінця у напрямку потоку зерна. Деформований лист 2110 обладнаний вимірювальним приладом 2120 (наприклад, тензодатчиками або датчиком тиску), що мають електричний зв'язок з монітором врожайності. Вимірювальний прилад 2120 переважно змонтований на верхній стороні листа 2110. Під час роботи, послідовні шари зерна переміщуються вздовж поверхні деформованого листа 2110 таким чином, що вільний кінець деформованого листа відхиляється вгору під дією відцентрових сил, які передаються до зерна елеватором. Фігура 22А ілюструє інший альтернативний датчик врожайності 2200, розташований у переважному місці над вершиною елеватора 30. Звертаючись до Фігури 22В, датчик врожайності 2200 включає в себе монтажний кронштейн 2220, встановлений на верхній стороні кожуху 20. Датчик врожайності 2200 включає в себе корпус датчика 2210, який проходить через отвір у монтажному кронштейні 2220 і через отвір, передбачений у кожусі 12, так що поверхня датчика 2250 корпусу датчика 2210 принаймні частково вирівняна з внутрішньою поверхнею кожуху 20. Поверхня датчика 2250 переважно спускається вздовж напрямку потоку зерна. Поверхня датчика 2250 переважно є дугоподібною. У деяких варіантах, поверхня датчика 2250 має кривизну, що по суті дорівнює кривизні внутрішньої поверхні кожуху 20 у місцеположенні, що примикає до поверхні датчика 130 (зліва на вигляді, зображеному на Фігурі 22В). Продовжуючи посилатися на Фігуру 22В, корпус датчика 2210 містить верхню частину 2218, з'єднану зі нерухомою опорою 116 за допомогою верхнього і нижнього важелів зміщення 2214, 2212. Нижній важіль зміщення 2212 переважно являє собою тонкий лист металу (наприклад, 8 UA 115654 C2 5 10 15 20 25 30 35 40 45 50 55 який має товщину від 0,01 дюйма до 0,02 дюймів), який кріпиться на першому кінці до нерухомої опори 116 і, який кріпиться на другому кінці до верхньої частини 2218 корпусу датчика 110. Верхній важіль зміщення 2214 переважно є товщім, ніж нижній важіль зміщення 2212. Верхній і нижній тензодатчики 2230-1, 2230-2 переважно кріпляться до верхньої і нижньої поверхонь, відповідно, верхнього важеля зміщення 2214. Тензодатчики 2230-1, 2230-2 переважно мають електричний зв'язок з графічним інтерфейсом користувача, розташованим у кабіні комбайну. Нерухома опора 116 кріпиться до монтажного кронштейну 2220. Під час роботи, послідовні шари зерна переміщуються вздовж поверхні датчика 2250, зміщуючи корпус датчика 2210 вгору і спричиняючи напруження на тензодатчики 2230-1, 2230-2 таким чином, що сигнал, генерований тензодатчиками, є пов'язаним з переміщенням вгору корпусу датчика. Звертаючись до Фігури 22С, профілі швидкості 2272 поперечних розрізів зернових мас 50 варіюються між кількома зонами 2270. У зоні 2270-1, швидкість зерна по суті є однорідною і по суті є вертикальною. У зоні 2270-2, величина швидкості зерна, а також відносна величина вертикальної складової швидкості зерна, зростає із збільшенням відстані від конвеєра 20. У зоні 2270-3, величина швидкості зерна продовжує зростати зі збільшенням відстані від конвеєра 20, але зерно в межах зони 2270-3 переважно має швидкість по суті паралельну поверхні датчика. У зоні 2270-4, швидкість зерна є неузгодженою за величиною і напрямком. Поверхня датчика 2250 датчика врожайності 2200 переважно розташована так, щоб контактувати із зерном у зоні 2270-3. Слід мати на увазі, що під час роботи датчику врожайності 100, що описаний тут раніше, зерно контактує з поверхнею датчика 122 в зоні 2270-3 так, що швидкість зерна безпосередньо перед контактом з поверхнею датчика 122 по суті є паралельною поверхні датчика; швидкість зернової маси 50 також переважно є по суті паралельною поверхні датчика 122, коли частина зернової маси знаходиться у контакті з поверхнею датчика. Таким чином, сила, прикладена зерном, що контактує з поверхнею датчика в датчику врожайності 100 і датчику врожайності 2200, переважно складається по суті з відцентрової сили, а не ударної сили. Вищенаведений опис представлено для того, щоб дозволити будь-якому середньому фахівцеві в даній галузі техніки втілити і використовувати даний винахід, і надається в контексті патентної заявки та її вимог. Різні модифікації переважного варіанту виконання пристрою, і загальні принципи та ознаки системи і способів, описаних тут, будуть очевидно вираженими для фахівців в даній галузі техніки. Таким чином, даний винахід не обмежується варіантами пристрою, системи і способів, описаними вище і проілюстрованими на фігурах, але має відповідати найширшому обсягу відповідно до сутності та обсягу пунктів формули винаходу, що додається. ФОРМУЛА ВИНАХОДУ 1. Пристрій для вимірювання врожаю, що збирається збиральним комбайном, включаючи елеватор очищеного зерна, який переносить зернову масу; при цьому елеватор очищеного зерна має кожух, верхню зірочку і нижню зірочку; при цьому верхня зірочка і нижня зірочка визначають площину елеватора, який включає в себе: поверхню датчика, розташовану над верхньою зірочкою; при цьому зазначена поверхня датчика має передній кінець і задній кінець; при цьому зазначені передній кінець і задній кінець розташовані суміжно з площиною елеватора; жорстку опору, що має передню частину і задню частину; при цьому зазначена передня частина жорстко підтримує зазначений передній кінець зазначеної поверхні датчика, зазначена задня частина жорстко підтримує зазначений задній кінець зазначеної поверхні датчика; і пружно-гнучкий елемент, який має перший кінець і другий кінець; при цьому зазначений перший кінець жорстко приєднаний до зазначеної опори і зазначений другий кінець приєднаний до кожуха елеватора очищеного зерна; в якому зазначена жорстка опора і зазначений пружно-гнучкий елемент взаємодіють, щоб утримувати зазначену поверхню датчика в першому положенні, коли сила зерна не діє на зазначену поверхню датчика; в якому зазначена жорстка опора і зазначений пружно-гнучкий елемент взаємодіють, щоб дозволити зазначеній поверхні датчика відхилятися у друге положення, коли сила зерна від зернової маси, що викидається елеватором, діє на зазначену поверхню датчика; в якому зазначений передній кінець зазначеної поверхні датчика переміщується вгору на першу відстань відносно елеватора очищеного зерна у міру того, як зазначена поверхня датчика відхиляється від зазначеного першого положення у зазначене друге положення; 9 UA 115654 C2 5 10 15 20 25 30 35 40 в якому зазначений задній кінець зазначеної поверхні датчика переміщується вгору на другу відстань відносно елеватора очищеного зерна у міру того, як зазначена поверхня датчика відхиляється від зазначеного першого положення у зазначене друге положення; і в якому зазначена перша відстань дорівнює зазначеній другій відстані таким чином, що зазначене перше положення є паралельним зазначеному другому положенню. 2. Пристрій за п. 1, в якому зерно у зерновій масі, що контактує із зазначеною поверхнею датчика, має складову горизонтальної швидкості, паралельну поверхні датчика безпосередньо перед контактуванням з поверхнею датчика. 3. Пристрій за п. 2, в якому зернова маса має складову горизонтальної швидкості, паралельну поверхні датчика при контактуванні з поверхнею датчика. 4. Пристрій за п. 1, який додатково включає в себе поверхню перед датчиком, що прилягає до поверхні датчика; при цьому зазначена поверхня перед датчиком розташована таким чином, щоб забезпечити безперервний потік зерна від зазначеної поверхні перед датчиком до зазначеної поверхні датчика, так щоб складова горизонтальної швидкості зберігала той же напрямок у міру того, як зерно переміщується від переднього кінця зазначеної поверхні перед датчиком до зазначеного заднього кінця зазначеної поверхні перед датчиком. 5. Пристрій за п. 4, в якому вертикальне зміщення між зазначеною поверхнею перед датчиком і зазначеною поверхнею датчика є меншим ніж десять сотих часток дюйма. 6. Пристрій за п. 4, який додатково включає в себе поверхню після датчика, що прилягає до поверхні датчика; при цьому зазначена поверхня після датчика розташована таким чином, щоб забезпечити безперервний потік зерна від зазначеної поверхні датчика до зазначеної поверхні після датчика, так щоб складова горизонтальної швидкості зерна зберігала той же напрямок у міру того, як зерно переміщується від зазначеного переднього кінця зазначеної поверхні датчика до заднього кінця зазначеної поверхні після датчика. 7. Пристрій за п. 1, в якому зазначена поверхня датчика відхиляється за допомогою переміщення при контакті з зерновою масою. 8. Пристрій за п. 7, в якому зазначена поверхня датчика відхиляється менше ніж на десять сотих часток дюйма. 9. Пристрій за п. 7, який додатково включає в себе: датчик переміщення, розташований для вимірювання відхилення зазначеної поверхні датчика. 10. Пристрій за п. 9, в якому зазначена поверхня датчика є недеформованою при контакті з зерновою масою. 11. Пристрій за п. 1, в якому зазначена зернова маса є безперервною при контактуванні із зазначеною поверхнею датчика, і в якому зазначена зернова маса є одночасно суміжною із зазначеними переднім кінцем і зазначеним заднім кінцем при переміщенні вздовж зазначеної поверхні датчика. 12. Пристрій за п. 1, який додатково включає в себе: першу пружину; і другу пружину, де зазначена перша пружина і зазначена друга пружина пружно утримують поверхню датчика у невідхиленому положенні. 13. Пристрій за п. 1, в якому пристрій має власну частоту, вищу ніж 400 Гц. 10 UA 115654 C2 11 UA 115654 C2 12 UA 115654 C2 13 UA 115654 C2 14 UA 115654 C2 15 UA 115654 C2 16 UA 115654 C2 17 UA 115654 C2 18 UA 115654 C2 19 UA 115654 C2 20 UA 115654 C2 21 UA 115654 C2 Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 22
ДивитисяДодаткова інформація
Назва патенту англійськоюYield monitoring apparatus, systems, and methods
Автори англійськоюStrnad, Michael, D., Koch, Justin, L.
Автори російськоюСтрнад Майкл Д., Кох Джастин Л.
МПК / Мітки
МПК: G01G 19/12, G06M 11/04, A01D 41/127, G01D 1/04, G01F 1/20
Мітки: врожайності, способи, моніторингу, системі, пристрій
Код посилання
<a href="https://ua.patents.su/24-115654-pristrijj-sistemi-ta-sposobi-monitoringu-vrozhajjnosti.html" target="_blank" rel="follow" title="База патентів України">Пристрій, системи та способи моніторингу врожайності</a>
Пристрій системи керування та моніторингу споживачів електричної енергії
Номер патенту: 72128
Опубліковано: 10.08.2012
Автори: Соколенко Богдан Валентинович, Дячук Владислав Сергійович, Полєтаєв Дмитро Олександрович, Таратухін Олександр Олександрович
МПК: G01R 19/25, H02J 3/00, G01R 11/00
Мітки: моніторингу, енергії, системі, споживачів, керування, пристрій, електричної
Формула / Реферат:
Пристрій системи керування та моніторингу споживачів електричної енергії, що містить блок керування, який відрізняється тим, що додатково містить пристрій комутації споживачів електричної енергії, датчики струму та фази, датчик напруги, додаткові датчики, модуль прийому/передачі даних, енергонезалежну пам'ять, причому блок керування підключений до пристрою комутації споживачів електричної енергії, модуля прийому/передачі даних та...
Пристрій для моніторингу місця доступу до судинної системи та устаткування для екстракорпорального лікування крові із пристроєм для моніторингу місця доступу до судинної системи
Номер патенту: 103474
Опубліковано: 25.10.2013
Автор: Коппершмідт Паскаль
МПК: A61M 1/36
Мітки: системі, екстракорпорального, судинної, пристрій, устаткування, місця, крові, пристроєм, доступу, моніторингу, лікування
Формула / Реферат:
1. Пристрій для моніторингу місця доступу до судинної системи у складі устаткування для проведення екстракорпорального лікування крові, призначеного для екстракорпорального лікування крові, коли кров витікає від місця доступу до судинної системи через артеріальний сегмент контуру екстракорпоральної циркуляції крові до елемента лікування крові та від елемента лікування крові через венозний сегмент повертається назад до місця доступу до...
Пристрій системи персонального моніторингу
Номер патенту: 55263
Опубліковано: 10.12.2010
Автори: Джужа Олександр Миколайович, Золотухін Костянтин Семенович, Орлов Юрій Юрійович, Гончар Валентин Кирилович, Кухаренко Сергій Вікторович
Мітки: персонального, пристрій, системі, моніторингу
Формула / Реферат:
Пристрій системи персонального моніторингу, до якого входять блоки датчиків положення і сигналізації, який відрізняється тим, що містить систему контролю та попередження про вихід особи за межі контрольної зони, в якій приймач з'єднаний з виходами антени та джерела живлення, вихід приймача з'єднаний з входом дешифратора системи сигналізації, перший вихід дешифратора системи сигналізації з'єднаний з аудіопристроєм з гучномовцем, а другий...
Пристрій, системи та способи подачі насіння
Номер патенту: 114300
Опубліковано: 25.05.2017
Автори: Ходел Джеремі Дж., Радтке Іан Р.
МПК: A01C 7/16
Мітки: подачі, пристрій, системі, насіння, способи
Формула / Реферат:
1. Пристрій подачі насіння для внесення насіння на посівну поверхню, який включає в себе:дозатор насіння, виконаний з можливістю захоплення і вивільнення насіння з висівного диска у місці для випуску насіння;зерновий конвеєр, розміщений для прийому насіння після вивільнення насіння із зазначеного висівного диска на верхньому кінці зазначеного зернового конвеєра, при цьому зазначений зерновий конвеєр включає в себе стрічку,...
Пристрій, системи і способи регулювання притискної сили рядного висівного апарата

Номер патенту: 110988
Опубліковано: 10.03.2016
Автори: Радтке Іан Р., Саудер Дерек Е., Столлер Джейсон Дж.
МПК: A01B 63/111, A01B 13/08, A01C 5/06, A01B 63/114, A01C 7/18
Мітки: способи, регулювання, апарата, висівного, пристрій, сили, притискної, системі, рядного
Формула / Реферат:
1. Система для застосування притискної сили до сільськогосподарського начіпного знаряддя, яке має багаторядні висівні апарати, що включає в себе:перший привід, при цьому зазначений перший привід призначений для застосування сили до першого рядного висівного апарата, при цьому зазначений перший привід включає в себе першу притискну камеру і першу підйомну камеру, при цьому тиск у зазначеній першій притискній камері має тенденцію...