Спосіб демонтажу і монтажу (заміни) лопаті ротора промислової вітроелектричної установки та пристрої, які застосовуються при цьому
Формула / Реферат
1. Спосіб демонтажу і монтажу (заміни) лопаті ротора промислової вітроелектричної установки (ВЕУ), який характеризується тим, що при демонтажі лопаті:
лопать, що демонтується, встановлюють у верхнє вертикальне положення, провертаючи ротор ВЕУ, фіксують ротор від провертання, а також фіксують лопать від провертання навколо поздовжньої осі лопаті;
після цього виконують зняття і транспортування лопаті, які здійснюють за допомогою вертольота, обладнаного підвісною системою для транспортування вантажів на зовнішній підвісці, а також пристроєм захоплення і підйому лопаті (ПЗПЛ), що включає утримувальне кільце, з'єднувальні троси, розподільники тросів з кільцем і каскадами тросів, що закінчуються петлями, а також хомут;
для цього на циліндричній поверхні лопаті біля фланця збирають і закріплюють хомут ПЗПЛ, на якому є вушка;
демонтують більшу частину кріпильних елементів кріплення лопаті до втулки ротора;
далі плавно знижують вертоліт таким чином, щоб кільце з розподільників тросів і утримувальне кільце послідовно вдяглися на лопать, а петлі тросів досягли вушок хомута; після чого забезпечують зависання вертольота;
петлі тросів каскадів тросів з'єднують з вушками хомута;
за допомогою повільного підйому вертольота вертикально вгору доводять підвісну систему і ПЗПЛ до стану натягу, і підтримують натяг за допомогою зависання вертольота;
потім під час зависання вертольота демонтують елементи кріплення лопаті, які залишилися на втулці ротора;
далі збільшують натяг ПЗПЛ понад вагу лопаті, направляючи вертоліт вертикально вгору і від'єднують лопать від втулки ротора;
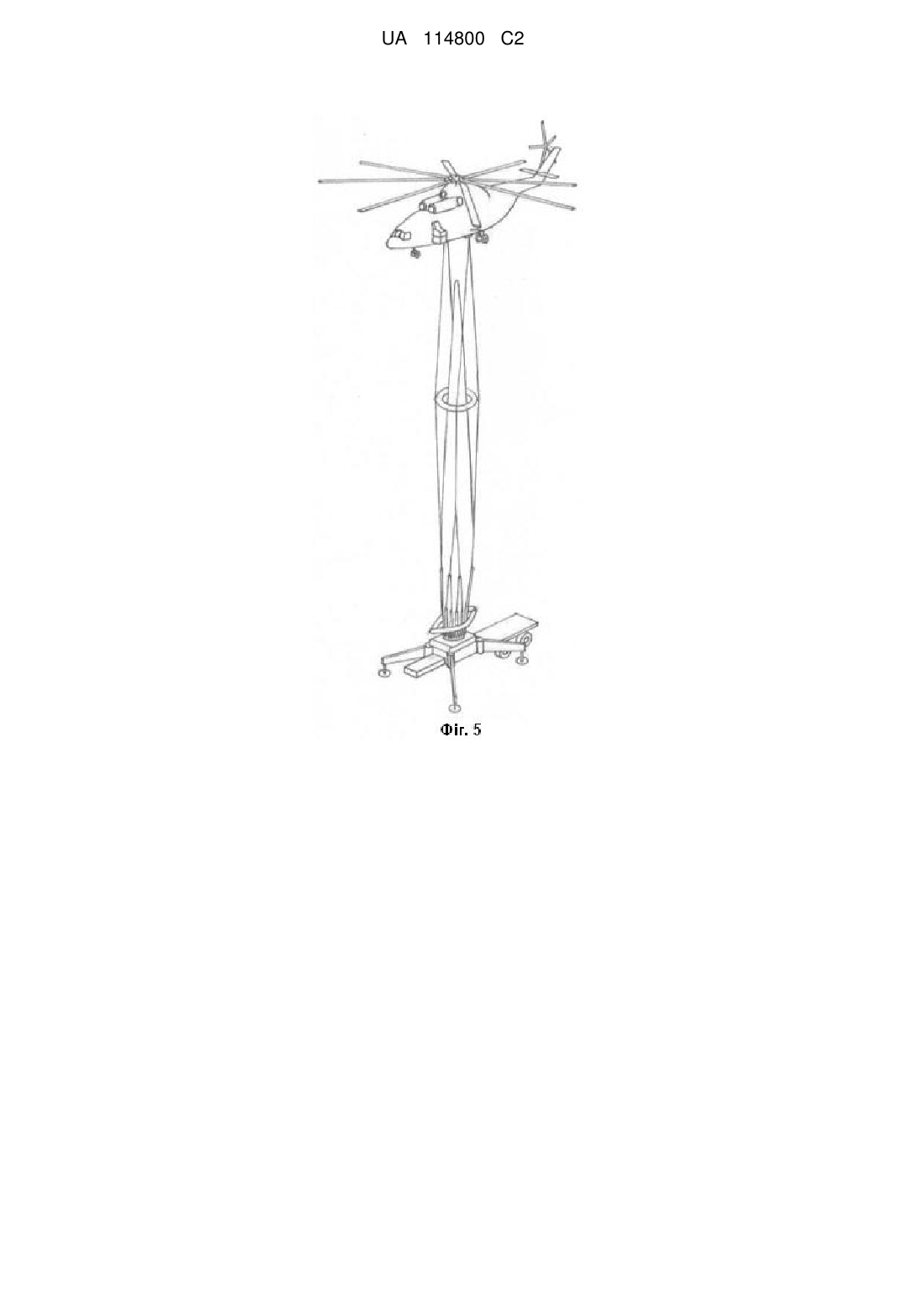
демонтовану лопать транспортують вертольотом у вертикальному положенні фланцем донизу до майданчика вантаження з розташованим на ній пристроєм для підняття та опускання лопаті (ППОЛ), що містить основну раму з поворотною плитою, фланцем, уловлювачами, розташованими по колу фланця поворотної плити, і допоміжну раму з ложементом;
доставлену лопать плавно опускають вертикально шляхом зниження вертольота до моменту потрапляння фланця лопаті між уловлювачами до зіткнення фланця лопаті з поворотною плитою;
після чого вертоліт переводять в режим висіння і, утримуючи його в цьому положенні, встановлюють частково кріпильні елементи кріплення лопаті до поворотної плити;
потім, плавно переміщаючи вертоліт в горизонтальній площині і одночасно його знижуючи, опускають лопать в горизонтальне положення за допомогою провертання поворотної плити і укладають лопать на ложемент, з можливістю зняття утримуючого кільця з лопаті;
далі відчіплюють петлі канатів підвісної системи вертольота від вушок утримуючого кільця і вертоліт з підчепленою підвісною системою відлітає;
з лопаті знімають хомут, утримуюче кільце, розподільники тросів з каскадами тросів, і приводять (упорядковують) ці вузли до робочого стану для встановлення їх на лопать, призначену до монтажу на ВЕУ замість знятої;
потім, використовуючи підйомний пристрій, піднімають хвостовик лопаті за поворотну плиту до від'єднання поворотної плити від основної рами і переміщують його до місця розташування наземного транспортного засобу, опускають і закріплюють плиту на наземному транспортному засобі;
транспортний засіб із закріпленою на ньому лопаттю відвозять від місця розташування основної рами ППОЛ на майданчику;
лопать, призначену для монтажу на втулку ротора ВЕУ замість знятої, підвозять на транспортному засобі на майданчик на місце розташування знятої лопаті, і за допомогою згаданих вище пристроїв надають їй положення, аналогічне до знятої лопаті;
подальшу установку лопаті на втулку ротора ВЕУ здійснюють у порядку, зворотному зняттю лопаті.
2. Спосіб за п. 1, в якому використовують хомут ПЗПЛ, який виконаний з можливістю збільшення сили тиску хомута на поверхню лопаті при збільшенні сили, прикладеної до хомута вздовж циліндричної поверхні лопаті.
3. Спосіб за п. 1, в якому перед від'єднанням лопаті демонтують 3/4 кріпильних елементів кріплення лопаті до фланця втулки ротора, або залишають мінімальну кількість кріпильних елементів, необхідну для підтримки лопаті у вертикальному положенні протягом короткого часу до підчеплення підвісної системи вертольота до лопаті;
при фіксації лопаті на ППОВ встановлюють рівномірно по колу 1/4 кріпильних елементів кріплення фланця лопаті до фланця поворотної плити, або встановлюють мінімальну кількість кріпильних елементів, необхідну для утримання лопаті під час наземного транспортування;
під час зняття кріпильних елементів кріплення лопаті на втулці ротора ВЕУ, натяг підвісної системи доводять до рівня від 1/2 до 3/4 від ваги лопаті.
4. Пристрій для захоплення і підйому лопаті промислової ВЕУ вертольотом при здійсненні способу за будь-яким із пп. 1-3, який містить:
хомут, що затягується, виконаний у вигляді концентрично розташованих рядів внутрішніх і зовнішніх клиновидних вставок, що утримуються такелажною стрічкою, намотаною в кілька шарів по колу зовнішнього ряду вставок, при цьому ряд внутрішніх клиновидних вставок утворює кільце з діаметром, рівним діаметру циліндричного хвостовика лопаті, а ряд зовнішніх клиновидних вставок утворює кільце з діаметром, рівним зовнішньому діаметру кільця, утвореного внутрішнім рядом клиновидних вставок, крім того, внутрішні і зовнішні вставки мають клиновидний профіль перерізу в напрямку вздовж циліндричної поверхні лопаті, причому вставки внутрішнього ряду виконані з пружного полімерного матеріалу, а вставки зовнішнього ряду виконані з твердого полімерного матеріалу або легкого металу;
утримуюче кільце, виконане у вигляді заповненого повітрям торовидного елемента і оснащене елементами для кріплення до підвісної системи вертольота;
розподільники тросів, виконані у вигляді заповнених повітрям циліндричних елементів, з'єднаних кінцями в кільце і оснащених елементами для їх кріплення до каскадів тросів і з'єднувальних тросів;
каскади тросів, виконані з декількох ярусів, при цьому кінці тросів нижнього ярусу з'єднані з вушками на зовнішніх клиновидних вставках хомута;
з'єднувальні троси, що з'єднують згадані утримуюче кільце, розподільники тросів і каскади тросів в єдину конструкцію.
5. Пристрій, за п. 4, в якому обидва кінці такелажної стрічки закріплені на вставках зовнішнього ряду, перешкоджаючи її розмотуванню.
6. Пристрій за п. 4, в якому поверхня внутрішніх клиновидних вставок, яка стикається з лопаттю, виконана увігнутою з радіусом, рівним радіусу циліндричної поверхні хвостовика лопаті, а поверхні внутрішніх і зовнішніх клиновидних вставок, які стикаються одна з одною, виконані плоскими.
7. Пристрій за п. 4 або п. 6, в якому поверхня внутрішніх клиновидних вставок, яка стикається з лопаттю, покрита абразивною пастою, а поверхні внутрішніх і зовнішніх клиновидних вставок, які стикаються одна з одною, покриті мастилом, що сприяє ковзанню вставок одна щодо одної.
8. Пристрій за п. 4, в якому утримуюче кільце і розподільники тросів виконані з герметичного гнучкого матеріалу, і оснащені кранами для наповнення їх повітрям під підвищеним тиском і випуску повітря.
9. Пристрій за п. 4 або п. 8, в якому внутрішня поверхня утримуючого кільця, яка звернена до поверхні лопаті, а також зовнішня поверхня по периметру посилені такелажними стрічками, при цьому на внутрішній поверхні утримуючого кільця до такелажної стрічки рівномірно по колу прикріплені металеві кільця і петлі для закріплення з'єднувальних тросів рівномірно по периметру утримуючого кільця, а поверхні розподільників тросів, які звернені до поверхні лопаті, посилені такелажними стрічками, до яких прикріплені металеві кільця і петлі, призначені для закріплення з'єднувальних тросів і каскадів тросів.
10. Пристрій за п. 4, в якому кріплення розподільників тросів між собою виконані швидкороз'ємними.
11. Пристрій за пп. 4, 8 або 9, в якому поверхні утримуючого кільця і розподільників тросів, які стикаються з поверхнею лопаті, покриті захисним м'яким матеріалом.
12. Пристрій за п. 4, в якому кожен кінець троса нижнього ярусу каскадів тросів з'єднаний з вушком одної зовнішньої клиноподібної вставки хомута, при цьому в середній частині трос перекинутий через блок, який прикріплений до кінця троса вищерозташованого ярусу, при цьому кожен трос вищерозташованого ярусу обома кінцями з'єднаний з блоками, а в середній частині трос перекинутий через блок, який з'єднаний з тросом наступного ярусу над вищерозташованим ярусом, при цьому каскади містять два яруси тросів, перекинутих через блоки.
13. Пристрій за п. 4, в якому розподільники тросів розміщені по висоті лопаті в місці стику сполучних тросів з верхнім ярусом каскадів тросів.
14. Пристрій підйому та опускання лопаті при здійсненні способу за будь-яким із пп. 1-3, який містить:
опорну раму для закріплення хвостовика лопаті ВЕУ, виконану з висувними елементами і регульованими упорами з вузлами контакту з ґрунтом, поворотну знімну плиту з фланцем, встановлену на опорній рамі з можливістю повороту плити навколо горизонтальної осі, фіксації плити в горизонтальному положенні від провертання, і можливістю швидкого від'єднання плити від опорної рами і швидкого під'єднання плити до опорної рами у вертикальному положенні плити;
допоміжну раму з ложементом для закріплення пера лопаті, при цьому опорна і допоміжна рами виконані з можливістю їх установки на транспортувальний засіб.
15. Пристрій за п. 14, в якому поворотна знімна плита оснащена отворами для входження в них кріпильних елементів, встановлених на фланці лопаті.
16. Пристрій за п. 14 або п. 15, в якому поворотна знімна плита оснащена напрямними елементами - "уловлювачами" для орієнтації хвостовика лопаті.
17. Пристрій за п. 14, в якому опорна рама пристрою виконана з можливістю регулювання та фіксування її положення відносно поверхні ґрунту за допомогою висувних елементів і регульованих упорів з вузлами контакту з ґрунтом.
Текст
Реферат: Група винаходів належить до вітроенергетики і дозволяє робити заміну лопатей вітроелектричних установок за допомогою вертольота без використання наземного підйомного крана. Пропонований спосіб включає використання пристрою для захоплення і підйому лопаті у вертикальному положенні, а також пристрій для підйому та опускання лопаті, які є винаходами. Спосіб і пристрої дозволяють виконувати заміни лопатей більшості моделей вітроустановок вагою до 15 тонн. Доробки лопатей перед демонтажем і нових лопатей не потрібно. Спосіб дозволяє скоротити обсяг і тривалість виконання робіт по заміні лопаті. Спосіб дозволяє виконувати заміни в умовах, несприятливих для наземних транспортних операцій - бездоріжжя, засніженості. Спосіб дозволяє виконувати будівництво нових вітроелектричних установок в місцях з більш високим вітровим потенціалом, що знаходяться у більш важкодоступних місцях для доставки довгомірних лопатей. При цьому транспортування лопатей вздовж важкодоступній частини маршруту здійснюють вертольотом в рамках єдиної безперервної операції демонтажу або монтажу. UA 114800 C2 (12) UA 114800 C2 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 60 Група винаходів "Спосіб демонтажу і монтажу (заміни) лопаті ротора промислової вітроелектричної установки і пристрої, які застосовуються при цьому", включає винаходи "Спосіб демонтажу та монтажу лопаті вітроелектричної установки (ВЕУ)", "Пристрій для захоплення і підйому лопаті" (далі в тексті - ПЗПЛ) і "Пристрій для піднімання і опускання лопаті" (далі в тексті - ППОЛ). Область техніки. Група винаходів належить до промислової вітроенергетики, в якій при експлуатації промислових вітроелектричних установок (далі в тексті - ВЕУ) виникає необхідність заміни великовагових вузлів ВЕУ у зв'язку з їх поломкою, а також при модернізації ВЕУ. Група винаходів відноситься також до монтажу нових ВЕУ, при якому вузли ВЕУ, включаючи лопаті, послідовно встановлюють і закріплюють на фундаменті і один на одному. Переважною областю техніки, до якої належить запропонована група винаходів, є заміна лопатей на промислових ВЕУ, що знаходяться в експлуатації. Рівень техніки. Аналоги запропонованого способу заміни лопатей промислових ВЕУ за допомогою вертольота невідомі. Однак, запропонований спосіб є аналогічним способу виконання монтажних робіт вертольотом на інших об'єктах, крім ВЕУ. Наприклад, способу монтажу опор ліній електропередач, опор канатних доріг, вишок телевізійної та інших видів зв'язку. Запропонований спосіб також є аналогічним відомому способу заміни лопатей промислових ВЕУ, який виконується за допомогою наземних підйомних кранів. Заміна лопаті ВЕУ включає транспортування знятої лопаті від місця демонтажу до майданчика навантаження на транспортний засіб, а також транспортування нової лопаті до місця монтажу. Відомі способи транспортування вантажів по місцевості, на якій відсутні дороги, у повітрі, апаратами легше повітря - повітряними кулями, аеростатами та дирижаблями. З патенту DE10210540A1 відомий спосіб транспортування вантажів за допомогою транспортного засобу легше повітря, який прив'язаний зафіксованими на землі тросами, довжина яких може змінюватись за рахунок наземних лебідок. При цьому транспортний засіб обладнано кранової лебідкою і тросом з гаком для підчеплення вантажу. У патенті DE10226868A1 описаний спосіб транспортування вантажів по територіях зі слабо розвиненою інфраструктурою за допомогою транспортного засобу легше повітря - аеростата, який з'єднаний з транспортним засобом підвищеної прохідності. Аеростат обладнаний кранової лебідкою та тросом, на якому підвішений вантаж, а також тросами, призначеними для переміщення аеростата. З патенту RU2451634C2 відомий удосконалений спосіб транспортування довгомірних великогабаритних вантажів, зокрема, лопатей ВЕУ, в якому апарат легше повітря прив'язується і прямує керованими лебідками, які змонтовані на тягачах підвищеної прохідності. Тягачі з активно керованими лебідками забезпечують маневреність по землі. Наведені способи транспортування вантажів мають такі суттєві недоліки: дані способи не можна використовувати на місцевості, по якій не можуть проїхати наземні транспортні засоби з встановленими на них лебідками, за допомогою яких переміщують транспортний засіб легше повітря; дані способи мають малу швидкість транспортування вантажу; транспортний засіб легше повітря має велику парусність і в умовах вітру має нестійке положення в просторі, що ускладнює точне маневрування транспортного засобу та утримання його в заданій точці при демонтажі і монтажі вантажу; троси від наземних транспортних засобів до апарата легше повітря мають прогин і слабину, що ускладнює переміщення апарата з вантажем і погіршує точність переміщення транспортних засобів для потрапляння в задану точку, а також точність утримання апарата в точці, необхідного для демонтажу/монтажу вантажу. Відомий спосіб монтажу конструкцій та обладнання на відкритій місцевості за допомогою вертольотів [1], [2]. Відомі вертольоти, здатні нести вантаж на зовнішній підвісці та виконувати монтажні роботи на відкритій місцевості: Sikorsky S-64 (США), Мі-10К, Ка-32, Мi-26Т (СРСР, Російська Федерація) [3], [4], [5], [6]. Серед способів монтажу конструкцій вертольотами, найбільш близьким по технічній сутності аналогом до заявленого винаходу є відомий спосіб монтажу опор ліній електропередач у важкодоступній місцевості за допомогою вертольота Sikorsky S-64 [7] і монтаж телевежі за допомогою вертольота Мi-26Т [8]. Спосіб монтажу конструкцій вертольотами включає основні операції: конструкцію, призначену до монтажу, підвішують на зовнішніх точках кріплення до фюзеляжу вертольота; 1 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 60 конструкцію, призначену до монтажу, переміщують вертольотом в точку над місцем монтажу і зупиняють вертоліт в режим зависання; вертоліт, з'єднаний підвісною системою з вантажем, утримують в режимі зависання і плавно опускають конструкцію на стик відповідної частини конструкції; вертоліт, з'єднаний підвісною системою з вантажем, утримують в режимі зависання до тих пір, поки монтажники закріплять вантаж з відповідною частиною конструкції; підвісну систему від'єднують від закріпленої конструкції і відводять вертоліт від місця монтажу. Аналоги способу монтажу лопатей ВЕУ за допомогою вертольота невідомі. Крім того, вертоліт має недостатньо високу точність маневрування в горизонтальній і вертикальній площинах в режимі малих швидкостей і недостатню стійкість в режимі висіння. Це призводить до додаткового маневрування для точного досягнення точки зависання, збільшення числа спроб попадання фланця лопаті у відповідний фланець на втулці ротора, ускладнення утримання вертольота в режимі висіння при закріпленні лопаті на втулці ротора в горизонтальному положенні, і, відповідно, збільшення загальної тривалості процесу монтажу [7]. При цьому в існуючих способах монтажу лопатей ВЕУ за допомогою наземного підйомного крана, для утримання лопаті при стикуванні та закріпленні лопаті на відповідному фланці на втулці ротора, використовується підвісний пристрій, в якому лопать розташована горизонтально. Прототипом для запропонованого винаходу вибраний відомий спосіб заміни лопатей ВЕУ в експлуатації, а також відомий спосіб установки лопатей при монтажі нових ВЕУ, за допомогою гусеничних і колісних підйомних кранів, наприклад, таких фірм, як Liebherr (ФРН), Demag (ФРН), Sarens (Бельгія), Manitowoc (США) [9], [10], [11]. Відомий спосіб монтажу лопатей на ВЕУ моделі Е-82 компанії Enercon (ФРН) [11], моделі V90-3MW компанії Vestas (Данія) [12], за допомогою наземного підйомного крана. Спосіб заміни лопаті на ВЕУ в умовах експлуатації включає наступні дії: підйомний кран доставляють, збирають і розгортають в робочий стан на майданчику біля башти ВЕУ [13]; демонтаж лопаті з втулки ротора виконують при горизонтальному положенні лопаті; або виконують демонтаж ротора цілком з опусканням його на майданчик біля башти ВЕУ, потім на землі знімають лопать з втулки ротора; зняту лопать перевозять від башти ВЕУ до місця ремонту або утилізації; перевезення лопаті здійснюють на спеціальному транспортному засобі для перевезення довгомірних конструкцій [14]; нову лопать встановлюють при горизонтальному положенні лопаті, як на втулку ротору, встановлену на гондолі на висоті, так і на втулку ротору, що лежить горизонтально на майданчику перед ВЕУ, а потім піднімають ротор цілком і встановлюють його на гондолу ВЕУ на башті; після завершення роботи підйомний кран розбирають на вузли, які вантажать на транспортні засоби для перевезення до наступного місця роботи крана. Однак, відомий спосіб заміни лопатей ВЕУ за допомогою наземних підйомних кранів має недоліки, які включають: тривалий період підготовки доріг та площадки для роботи крана - вирівнювання, трамбування ґрунту, відсипання покриття, та інших робіт [15], [16], [17]; тривалий період часу і складність доставки і збирання підйомного крана [18], [19], [20], [21]; тривалий період часу утримування лопаті підйомним краном на протязі відгвинчування всіх гайок на фланці кріплення лопаті до втулки, при знятті лопаті, а також утримування лопаті на протязі нагвинчування всіх гайок на фланці, при установці лопаті [22]; відстрочення та обмеження у виконанні замін лопатей або монтажу ВЕУ після випадіння атмосферних опадів (дощу, снігу) і погіршення умов для проїзду транспортних засобів (при негоді, ожеледі) по під'їзних дорогах до ВЕУ; тривалий період часу, який потрібен для розбирання крана після виконання робіт та підготовки до його транспортування до місця роботи на інших ВЕУ. Результатом перерахованих вище недоліків є високий рівень накладних витрат при заміні лопаті ВЕУ, викликаних тим, що для заміни однієї лопаті необхідно виконати великий обсяг підготовчих робіт, а також робіт з розбирання крана після заміни лопаті. Запропонований спосіб заміни лопаті ВЕУ за допомогою вертольота знижує и частково усуває перераховані вище недоліки способу-прототипу. Перевагами запропонованого способу заміни лопаті ВЕУ за допомогою вертольота, в порівнянні з заміною лопаті наземним підйомним краном, є: 2 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 60 відсутність доставки великогабаритного та великовагового підйомного крана або його вузлів до місця заміни, а також відсутність збирання підйомного крана та його розбирання; відсутність складної наземної доставки нової і знятої лопатей по спеціальних дорогах, прокладених від доріг загального призначення до фундаменту ВЕУ; відсутність використання великогабаритного підйомного крана; мінімальний вплив транспортних засобів на ґрунт і екосистему в районі розташування ВЕУ, а також мінімальний обсяг відновлення ландшафту та екосистеми після виконання заміни. Запропонований спосіб заміни лопаті ВЕУ включає використання пристрою ПЗПЛ промислових ВЕУ вертольотом у вертикальному положенні хвостовиком (фланцем) донизу. Аналоги запропонованого пристрою для захоплення і підйому лопатей промислових ВЕУ за допомогою вертольота невідомі. Відомо пристрій для транспортування довгомірних великогабаритних вантажів, переважно лопатей ВЕУ, за патентом RU 2451634, що містить вантажозахватний пристрій, поєднаний з мобільно керованою лебідкою за допомогою тягового троса, а з підйомним тілом за допомогою несучого тросу так, що великогабаритний вантаж, натягнутий в центрі ваги у вантажозахватному пристрої, під час транспортування може самостійно обертатися за вітром та зберігати горизонтальне положення. Недоліком відомого пристрою є неможливість захоплення і транспортування лопатей промислових ВЕУ у вертикальному положенні, що робить неможливим його застосування для демонтажу та монтажу лопатей ВЕУ у вертикальному положенні. Відомо також пристрій для транспортування і монтажу вантажу літальним апаратом за патентом RU 2350511С1, вибраний як прототип, що містить зовнішню підвіску, що включає траверсу з вантажними канатами, забезпечену вантажозахватами, і сполучену за допомогою двох збіжних зв'язків із вантажним замком вертольота, і систему орієнтації вантажу за азимутом, що містить два приводи, закріплених на фюзеляжі. Пристрій додатково містить важелі з пружними пристроями, встановленими на фюзеляжі. Пристрій забезпечує автоматичний натяг гнучких тяг у процесі розгону при транспортуванні вантажу вертольотом Мі-26 до швидкості 120 км/год. і гасінні швидкості до нуля. Пристрій забезпечує виконання монтажних робіт. Експлуатація пристрою не вимагає постійного контролю натягу гнучких тяг і регулювання їх довжини залежно від прискорення розгону або гальмування вертольота, парусності вантажу та швидкості зустрічного потоку повітря. Недоліками цього пристрою є те, що він не призначений для захоплення і транспортування лопаті ВЕУ у вертикальному положенні, конструкція якої не містить спеціальних елементів для підчеплення лопаті, а також наявність станини в складі пристрою, що призводить до додаткової ваги зв'язки "станина-вантаж". Для виконання заміни лопаті ВЕУ і монтажу нової лопаті вертольотом при будівництві ВЕУ необхідно забезпечити опускання лопаті, що транспортується вертольотом у вертикальному положенні, в горизонтальне положення на транспортувальний автомобільний причіп. Необхідно також забезпечити підйом лопаті з горизонтального положення на транспортувальному засобі у вертикальне положення для підчеплення до вертольота. Запропонований спосіб заміни лопаті ВЕУ включає використання Пристрою для підйому та опускання лопатей (далі - ППОЛ) промислових ВЕУ з горизонтального положення у вертикальне і з вертикального положення в горизонтальне, за допомогою вертольота. Аналоги запропонованого пристрою для підйому та опускання лопатей промислових ВЕУ за допомогою вертольота невідомі. Відомий пристрій для підйому довгомірної конструкції у вертикальне положення за патентом RU 2106296C1, що включає монтажний шарнір, систему блоків, що огинаються гнучкими тягами. Пристрій призначений для підйому довгомірної конструкції в обмежених умовах з найменшими витратами часу. Перед підйомом до конструкції, що лежить на землі і встановлена на монтажному шарнірі, в напрямку від нижньої частини до верхньої частини прикріплюють гнучкі тяги, кожна з яких пропущена через блок, що відхиляє. Першу гнучку тягу підчіплюють до вантажопідйомного пристрою, переважно вертольота, за допомогою каната, натягують систему гнучких тяг з блоками і піднімають конструкцію у вертикальне положення. Недоліком пристрою є те, що його складно застосувати для зворотного завдання опускання довгомірної конструкції з вертикального положення в горизонтальне при демонтажі конструкції. Складність полягає в складанні і натягу гнучких тяг з блоками до підчеплення до вертольота, а також в збиранні під час висіння вертольота. Іншим недоліком пристрою є складність його застосування для піднімання чи опускання гладких оболонкових конструкцій, наприклад лопатей ВЕУ, на поверхні яких відсутні елементи кріплення підвісного пристрою. 3 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 60 Відомо пристрій для підйому довгомірної оболонкової конструкції, що транспортується на багатовісному транспортному засобі, у вертикальне положення, за патентом RU 93378U1. Пристрій дозволяє передавати зусилля, що виникає при підйомі або опусканні конструкції, прикладене до оболонкової конструкції, без необхідності наявності конструктивних елементів кріплення на зовнішній поверхні конструкції, шляхом постановки клиновидного затиску, який зчленований шарнірно з рамою транспортного засобу та болтовим з'єднанням з ложементом. Недоліком пристрою є відсутність можливості регулювання положення рами відносно поверхні майданчика для того, щоб при піднятому положенні вантаж встановився строго вертикально і не створював перекидний момент для пристрою з закріпленим на рамі вантажем. Іншим недоліком пристрою є необхідність зняття клиновидного затиску після підняття вантажу у вертикальне положення. Довжина оболонкової конструкції, наприклад, лопаті ВЕУ, може становити 50 метрів і більше, тому клиновидний затиск може бути розташований на висоті більше 20 метрів від шарнірного з'єднання з рамою. Відповідно, після підняття конструкції у вертикальне положення, необхідно зняти затискач на висоті більше 20 метрів, для чого потрібен спеціальний підйомник. Відомий пристрій "адаптер для лопаті ВЕУ", призначений для переміщення лопаті ВЕУ в просторі і транспортування лопаті, без опори пера лопаті на другий колісний візок, згідно заявці DE102010042783. Даний пристрій є прототипом для запропонованого пристрою ППОЛ. Пристрій "адаптер для лопаті ВЕУ" дозволяє закріпити лопать консольно за фланець на поворотній плиті, підняти лопать під кутом до 40 градусів від площини розташування коліс на грунті, і транспортувати лопать в такому положенні по дорозі, прокладеній в пересіченій місцевості, по якій транспортувати цю лопать звичайним способом на напівпричепі з заднім візком, на який спирається перо лопаті, не представляється можливим. Однак, пристрій "адаптер для лопаті ВЕУ" має недоліки. Пристрій не дозволяє встановити лопать у вертикальному положенні відносно грунту. Також не передбачено регулювання положення пристрою відносно грунту. Запропонований пристрій для підйому та опускання лопаті ВЕУ усуває перераховані вище недоліки прототипу. В основу групи винаходів поставлено задачу удосконалення способу заміни лопатей ВЕУ в експлуатації, а також способу монтажу лопатей при будівництві нових ВЕУ, з урахуванням таких вимог: спосіб повинен забезпечити заміну лопатей і монтаж лопатей більшості моделей промислових ВЕУ, встановлених як на суші, так і в прибережній і шельфовій зоні; спосіб повинен забезпечити захоплення та утримання лопатей більшості моделей промислових ВЕУ без додаткової доробки лопатей перед зняттям, а також без доробки лопатей, призначених до установки; спосіб повинен забезпечити заміну лопатей і монтаж лопатей більшості моделей промислових ВЕУ протягом коротшого періоду часу, ніж виконується заміна та монтаж відомими способами за допомогою підйомних кранів; спосіб повинен забезпечити мінімальний вплив на навколишній ландшафт при здійсненні заміни лопатей і монтажу лопатей; спосіб повинен забезпечити заміну лопатей і монтаж лопатей в будь-яку пору року, з мінімальними обмеженнями за погодними умовами; спосіб повинен в мінімальному ступені залежати від відстані між ВЕУ і дорогами загального користування, від стану під'їзних доріг до ВЕУ, від місця розташування ВЕУ на важкодоступній місцевості; спосіб повинен забезпечити можливість будівництва ВЕУ в місцях з більш високим вітровим потенціалом, що знаходяться у важкодоступних умовах бездоріжжя, включаючи на схилах і вершинах пагорбів, на перевалах в гірській місцевості, в лісовій місцевості, на островах і півостровах берегової зони; спосіб повинен передбачати мінімальну модифікацію конструкції нових моделей лопатей ВЕУ, які проектуються і будуть проектуватися. Задача включає забезпечення реалізації удосконаленого способу шляхом розробки необхідних технічних рішень і пристроїв. В основу винаходу "Пристрій для захоплення і підйому лопаті ВЕУ" поставлено задачу забезпечити захоплення і підйом лопаті промислової ВЕУ за допомогою пристрою, підчепленого до вертольота. При цьому лопать розташована у вертикальному положенні і закріплена хвостовиком на втулці ротора ВЕУ. Пристрій повинен забезпечити підйом і утримання лопаті при її транспортуванні вертольотом у повітрі у вертикальному положенні, при виконанні замін лопатей промислових ВЕУ при експлуатації ВЕУ, а також при будівництві нових ВЕУ. 4 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 В основу винаходу "Пристрій для підйому та опускання лопаті ВЕУ" поставлено задачу створення пристрою, що дозволяє опускати вертольотом лопать промислової ВЕУ з вертикального положення в горизонтальне і закріплювати її на засобі для наземного транспортування, а також піднімати вертольотом лопать з горизонтального положення у вертикальне для подальшого транспортування лопаті вертольотом у повітрі. Технічним результатом винаходу "Спосіб демонтажу і монтажу (заміни) лопаті ротора промислової вітроелектричної установки" є: скорочення обсягів робіт та строків заміни лопаті ВЕУ; виконання заміни лопатей на ВЕУ, розташованих у важкодоступних місцях для доставки довгомірних лопатей і великовагових кранів, а також виконання монтажу лопатей при будівництві ВЕУ в місцях, недоступних для доставки лопатей і кранів. Технічним результатом винаходу "Пристрій для захоплення і підйому лопаті ВЕУ" є: можливість виконання захоплення, підйому і переміщення у повітрі лопатей більшості моделей ВЕУ, у вертикальному положенні, за допомогою вертольота, без доробки лопаті перед зняттям або установкою; мала вага, легкість збирання та встановлення вузлів пристрою на лопать і підчеплення до вертольота, що дозволяє виконати роботу силами двох пар монтажників без використання великогабаритних підйомних засобів; скорочення тривалості заміни лопатей ВЕУ. Технічним результатом винаходу "Пристрій для підйому та опускання лопаті ВЕУ" є: можливість встановлення лопаті у вертикальному положенні відносно ґрунту для підчеплення її вертольотом і транспортування в такому положенні; забезпечення зміни положення лопатей ВЕУ у вертикальне положення фланцем донизу, а також у зворотному напрямку, для забезпечення можливості підчеплення лопаті вертольотом і її транспортування у вертикальному положенні; можливість зміни положення лопаті і переміщення хвостовика лопаті на майданчику для різних моделей лопатей ВЕУ. Технічний результат винаходу "Спосіб заміни лопаті ротора промислової вітроелектричної установки за допомогою вертольота" досягається тим, що лопать, що демонтується, встановлюють у верхнє вертикальне положення, провертаючи ротор ВЕУ, фіксують ротор від провертання, а також фіксують лопать від провертання навколо поздовжньої осі лопаті, після цього виконують зняття і транспортування лопаті, які здійснюють за допомогою вертольота, обладнаного підвісною системою для транспортування вантажів на зовнішній підвісці, а також пристроєм захоплення і підйому лопаті (далі - ПЗПЛ), що включає утримувальне кільце, з'єднувальні троси, розподільники тросів з кільцем і каскадами тросів, що закінчуються петлями, а також хомут, для цього на циліндричній поверхні лопаті біля фланця збирають і закріплюють хомут ПЗПЛ, на якому є вушка, демонтують більшу частину кріпильних елементів кріплення лопаті до втулки ротора, далі плавно знижують вертоліт таким чином, щоб кільце з розподільників тросів і утримувальне кільце послідовно вдяглися на лопать, а петлі тросів досягли вушок хомута, після чого вертоліт зависає, петлі тросів каскадів тросів з'єднують з вушками хомута, за допомогою повільного підйому вертольота вертикально вгору доводять підвісну систему і ПЗПЛ до стану натягу, і підтримують натяг за допомогою зависання вертольота, потім під час зависання вертольота демонтують елементи кріплення лопаті, які залишилися на втулці ротора, далі збільшують натяг ПЗПЛ понад вагу лопаті, направляючи вертоліт вертикально вгору і від'єднують лопать від втулки ротора, демонтовану лопать транспортують вертольотом у вертикальному положенні фланцем донизу до майданчика вантаження з розташованим на ній пристроєм для підняття та опускання лопаті (далі - ППОЛ), що містить основну раму з поворотною плитою, фланцем, уловлювачами, розташованими по колу фланця поворотної плити, і допоміжну раму з ложементом, доставлену лопать плавно опускають вертикально шляхом зниження вертольота до моменту потрапляння фланця лопаті між уловлювачами до зіткнення фланця лопаті з поворотною плитою, після чого вертоліт переводять в режим висіння і, утримуючи його в цьому положенні, встановлюють частково кріпильні елементи кріплення лопаті до поворотної плити, потім, плавно переміщаючи вертоліт в горизонтальній площині і одночасно його знижуючи, опускають лопать 5 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 в горизонтальне положення за допомогою провертання поворотної плити і укладають лопать на ложемент, з можливістю зняття утримуючого кільця з лопаті, далі відчіплюють петлі канатів підвісної системи вертольота від вушок утримуючого кільця і вертоліт з підчепленою підвісною системою відлітає, з лопаті знімають хомут, що утримує кільце, розподільники тросів з каскадами тросів, і призводять (упорядковують) ці вузли до робочого стану для постановки їх на лопать, призначену до монтажу на ВЕУ замість знятої, потім, використовуючи підйомний пристрій, піднімають хвостовик лопаті за поворотну плиту до від'єднання поворотної плити від основної рами і переміщують його до місця розташування наземного транспортного засобу, опускають і закріплюють плиту на наземному транспортному засобі, транспортний засіб із закріпленою на ньому лопаттю відвозять від місця розташування основної рами ППОЛ на майданчику, лопать, призначену для монтажу на втулку ротора ВЕУ замість знятої, підвозять на транспортному засобі на майданчик на місце розташування знятої лопаті, і за допомогою згаданих вище пристроїв надають їй положення, аналогічне до знятої лопаті, подальшу установку лопаті на втулку ротора ВЕУ здійснюють у порядку, зворотному зняттю лопаті. Технічний результат другого винаходу досягається тим, що пристрій ПЗПЛ містить хомут, що затягується, виконаний у вигляді концентрично розташованих рядів внутрішніх і зовнішніх клиновидних вставок, що утримуються такелажною стрічкою, намотаною в кілька шарів по колу зовнішнього ряду вставок, при цьому ряд внутрішніх клиновидних вставок утворює кільце з діаметром, рівним діаметру циліндричного хвостовика лопаті, а ряд зовнішніх клиновидних вставок утворює кільце з діаметром, рівним зовнішньому діаметру кільця, утвореного внутрішнім рядом клиновидних вставок, крім того, внутрішні і зовнішні вставки мають клиновидний профіль перерізу в напрямку вздовж циліндричної поверхні лопаті, причому вставки внутрішнього ряду виконані з пружного полімерного матеріалу, а вставки зовнішнього ряду виконані з твердого полімерного матеріалу або легкого металу; утримуюче кільце, виконане у вигляді заповненого повітрям торовидного елемента і забезпечене елементами для кріплення до підвісної системи вертольота, розподільники тросів, виконані у вигляді заповнених повітрям циліндричних елементів, з'єднаних кінцями в кільце і забезпечених елементами для їх кріплення до каскадів тросів і з'єднувальних тросів, каскади тросів, виконані з декількох ярусів, при цьому кінці тросів нижнього ярусу з'єднані з вушками на зовнішніх клиновидних вставках хомута, з'єднувальні троси, що з'єднують згадані утримуюче кільце, розподільники тросів і каскади тросів в єдину конструкцію. Найкращим варіантом фіксування такелажної стрічки хомута є закріплення її кінців на зовнішньому ряді клиновидних вставок, що забезпечує її намотування і перешкоджає розмотуванню. Оптимальним варіантом виконання хомута є виконання клиновидних вставок, які стикаються з лопаттю, увігнутими з радіусом, що дорівнює радіусу циліндричної поверхні хвостовика лопаті, а поверхні внутрішніх і зовнішніх клиновидних вставок, які стикаються одна з одною, виконані плоскими. Переважним варіантом виконання хомута є покриття поверхонь внутрішніх клиновидних вставок, які стикаються з лопаттю, пастою з абразивним порошком, а покриття поверхонь внутрішніх і зовнішніх клиновидних вставок, які стикаються одна з одною, мастилом, що сприяє ковзанню вставок одна щодо одної. Конкретна форма виконання утримуючого кільця передбачає використання герметичного гнучкого матеріалу. Для заповнення повітрям і відведення повітря утримуюче кільце і розподільники тросів забезпечені кранами. Конструкція утримуючого кільця передбачає посилення по периметру внутрішньої і зовнішньої поверхонь такелажними стрічками. Основним варіантом закріплення утримуючого кільця на підвісній системі вертольота передбачено розміщення металевих кілець і петель на такелажній стрічці вздовж зовнішнього периметра кільця і кріплення до них з'єднувальних тросів. 6 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 60 Переважним варіантом виконання розподільників тросів передбачено роз'єми на кінцях розподільників, які дозволяють швидко з'єднати розподільники в кільцеподібну конструкцію, а також швидко їх роз'єднати. Для захисту поверхні лопаті при контакті з утримуючим кільцем, внутрішня поверхня окружності утримуючого кільця може бути покрита захисним шаром з м'якого тканого або нетканого матеріалу. Для рівномірного розподілу сил тяги, які відчувають з'єднувальні троси, між зовнішніми клиноподібними вставками хомута, в кращому варіанті використання винаходу, кожен кінець троса нижнього ярусу каскадів тросів з'єднаний з однією зовнішньою клиноподібною вставкою хомута, при цьому в середній частині трос перекинутий через блок, який прикріплений до кінця троса вище розташованого ярусу, при цьому кожен трос вище розташованого ярусу обома кінцями з'єднаний з блоками, а в середній частині трос перекинутий через блок, який з'єднаний з тросами наступного над вище розташованим ярусом, при цьому каскади містять два яруси тросів, перекинутих через блоки. Найкращим місцем розміщення розподільників тросів по висоті лопаті для запобігання заплутуванню тросів в повітряному потоці від несучого гвинта вертольота є місце біля стику з'єднувальних тросів і каскадів тросів. Технічний результат третього винаходу досягається тим, що ППОЛ містить опорну раму для закріплення хвостовика лопаті ВЕУ, виконану з висувними упорами і вузлом контакту з ґрунтом, поворотну знімну плиту з фланцем, встановлену на опорній рамі з можливістю повороту навколо горизонтальної осі і фіксації її в горизонтальному положенні від провертання, допоміжну раму з ложементом для закріплення пера лопаті, при цьому опорна і допоміжна рами виконані з можливістю їх установки на зовнішній транспортувальний пристрій. Найкращим варіантом виконання пристрою є швидкознімне кріплення поворотної плити до опорної рами в положенні, коли плита розташована перпендикулярно площині опорної рами. У переважному варіанті виконання пристрою, поворотна плита виконана з можливістю закріплення на ній фланців декількох різних моделей лопатей ВЕУ. Поворотна плита може бути забезпечена напрямними елементами для орієнтації хвостовика лопаті при опусканні лопаті на місце контакту з поверхнею плити. Для забезпечення вертикальності осі лопаті при закріпленні її на опорній рамі, рама виконана з можливістю регулювання та фіксування її положення відносно поверхні ґрунту за допомогою висувних упорів і вузлів контакту з ґрунтом. Скорочення обсягів робіт та строків заміни лопаті ВЕУ досягається за рахунок виконання заміни лопаті за допомогою вертольота і застосування при цьому технічних рішень, які істотно скорочують кількість виконуваних операцій і кількість використовуваного наземного устаткування. Перевагою способу при заміні лопаті у важкодоступних місцях розташування ВЕУ є значно більша швидкість транспортування лопаті у повітрі в порівнянні з наземним транспортуванням. Виконання маніпуляцій з лопаттю, що знаходиться у вертикальному положенні, попередній демонтаж більшої частини кріпильних елементів кріплення лопаті до початку операції зняття лопаті з відповідного фланця, а також монтаж мінімального числа кріпильних елементів під час операції з установки лопаті на відповідний фланець, дозволяє виконувати мінімальний обсяг операцій під час режиму висіння вертольота і призводить до мінімальної тривалості висіння вертольота. Суттєво впливають на технічний результат використання простих, легких і легко монтованих і демонтованих пристроїв і засобів, які можна пристосувати на місці під різну довжину лопаті, різний діаметр хвостової частини лопаті, різні кількість і розміри елементів кріплення лопаті до відповідного фланця. Додатковою перевагою способу є те, що всі операції на місці демонтажу та монтажу лопаті проводяться без використання наземних великогабаритних підйомних кранів, а також опускання і піднімання лопаті з вертикального положення при транспортуванні у повітрі в горизонтальне положення на пристрій для наземного розміщення, піднімання з горизонтального положення з пристрою для наземного розміщення у вертикальне положення для транспортування у повітрі, проводяться без використання наземних підйомних засобів. Захоплення та утримання лопаті вертольотом досягається за рахунок використання затискаючого хомута - вузла у складі ПЗПЛ, який дозволяє утримувати вагу лопаті за рахунок сил тертя. Суттєво впливає на технічний результат використання технічних рішень, які гарантують рівномірний розподіл сил тертя по площі поверхонь контакту, а також відсутність прослизання хомута при захопленні і переміщенні лопаті. 7 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 60 Перевагою пристрою є можливість захоплення лопаті без доробки лопаті перед зняттям, а також без доробки існуючих моделей лопатей ВЕУ, призначених для монтажу. Ключовою перевагою пристрою є можливість регулювання габаритних і приєднувальних розмірів вузлів ПЗПЛ щодо різних моделей ВЕУ. Додатковою перевагою ПЗПЛ є мала вага деталей вузлів, які можуть зібрати дві пари монтажників - одна пара знаходиться на майданчику перевалки, друга пара знаходиться біля лопаті, що демонтується, без додаткових підйомних засобів, а також простота їх складання в єдину конструкцію і розбирання після використання. Зміна положення лопаті ВЕУ, підчепленої до вертольота, з горизонтального у вертикальне, і в зворотному напрямку, шляхом маневрування вертольота, досягається за рахунок використання ППОЛ, шляхом закріплення хвостовика лопаті на поворотній плиті пристрою, яка закріплена на рамі, встановленої на ґрунті, а плита повертається навколо горизонтальної осі. Перевагою пристрою є наявність регульованих упорів на рамі, які дозволяють встановлювати лопать строго у вертикальному положенні. Істотною перевагою пристрою є можливість використання змінних поворотних плит, кожна з яких виконана з розмірами посадочних поверхонь фланця конкретної моделі лопаті ВЕУ. Група винаходів пояснюється наступними схемами: Фіг. 1 - вигляд лопаті, встановленої у вертикальному верхньому положенні на втулці ротору ВЕУ; Фіг. 2 - вигляд фланцевої частини лопаті з встановленим на неї вузлом "хомут" ПЗПЛ; Фіг. 3 - вигляд вертольота з підчепленим ПЗПЛ на підльоті до ВЕУ; Фіг. 4 - вигляд вертольота з підчепленим ПЗПЛ, який приєднаний до лопаті; Фіг. 5 - опускання лопаті вертольотом вертикально на поворотний фланець ППОЛ; Фіг. 6 - опускання лопаті вертольотом в горизонтальне положення; Фіг. 7 - вигляд утримуючого кільця ПЗПЛ; Фіг. 8 - вигляд розподільників тросів і хомута ПЗПЛ; Фіг. 9 - вигляд на розподільники тросів перпендикулярно поздовжній осі лопаті; Фіг. 10 - розміщення каскадів тросів навколо лопаті і розгортка каскадів тросів; Фіг. 11 - вигляд хомута, зібраного на лопаті і переріз хомута; Фіг. 12 - вигляд хомута і натяг такелажної стрічки; Фіг. 13 - вигляд ППОЛ в розгорнутому положенні перед опусканням на нього лопаті; Фіг. 14 - вигляд ППОЛ з опущеною на нього лопаттю; Фіг. 15 - перекладка хвостовика лопаті на напівпричіп для транспортування. Для виконання заміни та монтажу лопатей вертольотом необхідно забезпечити захоплення лопаті і її утримання підвісною системою вертольота. Для цього використовується запропонований Пристрій для захоплення і підйому лопаті ВЕУ вертольотом (ПЗПЛ). Для виконання заміни та монтажу лопатей вертольотом необхідно забезпечити опускання лопаті, що транспортується вертольотом у вертикальному положенні, в горизонтальне положення на пристрій для наземного розміщення. Також необхідно забезпечити підйом лопаті з горизонтального у вертикальне положення для підчеплення до вертольота. Для цього використовується запропонований Пристрій для підйому та опускання лопаті ВЕУ вертольотом (ППОЛ). Пристрій для захоплення і підйому лопаті ВЕУ (100) складається з вузлів - хомута (110), утримуючого кільця (120), розподільників тросів (130), каскадів тросів (140) і з'єднувальних тросів (150), як показано на фіг. 3 і 4. Хомут (110) складається з двох рядів клиновидних вставок - ряду внутрішніх вставок (111) і ряду зовнішніх вставок (112), утримуваних концентрично такелажною стрічкою (113), намотаною по колу зовнішнього ряду вставок за допомогою важеля (114), як показано на фіг. 11. Внутрішній ряд клиновидних вставок (111) розташований по окружності циліндричного хвостовика лопаті (400). Вставки виконані з пружного полімерного матеріалу і мають клиновидний профіль перерізу в напрямку вздовж циліндричної поверхні лопаті. Поверхня внутрішніх вставок, яка стикається з лопаттю, виконана увігнутою з радіусом, рівним радіусу циліндричної поверхні лопаті, і містить вкраплення абразивного порошку. На поверхню подано пастоподібний матеріал з властивостями, що клеять, а також з включенням абразивного порошку. Поверхня внутрішніх вставок, яка стикається із зовнішніми вставками, виконана плоскою. Зовнішній ряд клиновидних вставок (112) розташований із зовнішнього боку кола внутрішнього ряду клиновидних вставок. Кожна вставка зовнішнього ряду виконана з твердого полімерного матеріалу або легкого металу і має клиновидний профіль перерізу в напрямку вздовж циліндричної поверхні лопаті. На торцевій поверхні кожної зовнішньої вставки з боку 8 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 тонкої частині розташовано вушко. Зовнішні вставки мають виступи у нижній і верхній частинах, які утворюють в окружному напрямку обід, на який намотується такелажна стрічка. У верхній частині зовнішніх вставок є виступи, за допомогою яких вставки утримуються у просторі на внутрішніх вставках під час збирання хомута на хвостовику лопаті. Поверхні зовнішніх і внутрішніх вставок, які стикаються одна з одною, покриті мастилом, що сприяє ковзанню вставок одна по одній. Комплект хомута містить 64 зовнішніх вставки і 64 внутрішніх вставки. Такелажна стрічка (113) виконана з тканого матеріалу і має довжину, що дозволяє намотати кілька шарів стрічки концентрично один на одний. Кінці такелажної стрічки містять елементи, що дозволяють закріпити стрічку на зовнішньому ряді вставок. По довжині такелажної стрічки розташовані елементи (114), що дозволяють скріпити шари стрічки між собою. У зібраному вигляді зовнішній ряд клиновидних вставок з намотаною на них такелажної стрічкою утворює кільцевий хомут. Хомут збирають на хвостовику лопаті шляхом встановлення внутрішніх вставок по периметру циліндричної поверхні хвостовика, потім встановлюють на них зовнішні вставки і обмотують отримане кільце такелажною стрічкою. Завдяки клеючим властивостям покриття, нанесеного на поверхню внутрішніх вставок, яка контактує з лопаттю, ці вставки фіксуються на хвостовику лопаті при збиранні хомута, коли лопать розташована у вертикальному положенні хвостовиком донизу. Такелажну стрічку намотують навколо хвостовика лопаті в декілька шарів з натягом. Натяг забезпечують за допомогою важеля (115), який закріплюють у паз, виконаний на кожній зовнішній вставці. Натяг такелажної стрічки забезпечує силу F1, з якою кожна внутрішня вставка притискається до циліндричної поверхні хвостовика лопаті. Абразивний порошок, який вкраплений в поверхню контакту внутрішніх вставок з лопаттю, а також який входить до складу пастоподібного матеріалу, що знаходиться між поверхнями контакту, перешкоджає зрушенню внутрішніх вставок по поверхні хвостовика лопаті при додатку тягнучої сили F2 від каскадів тросів до зовнішніх вставок вздовж циліндричної поверхні лопаті. Утримуюче кільце (120) являє собою оболонку і виконано з герметичної тканини, просоченої гумополімерним матеріалом, у формі круглого або овального тору (121), забезпеченого клапаном (122) для заповнення повітрям, і заповнено повітрям під підвищеним тиском. Найкраща форма кільця в плані - овальна, як показано на фіг.7. Утримуюче кільце розташоване на рівні від 2/3 до 3/4 висоти лопаті, як показано на фіг.4. Для під'єднання з'єднувальних тросів на утримуючому кільці є вушка (123). Для перенесення і розкладання кільця в робоче положення по його периметру виконані ручки (124). Внутрішня поверхня кільця призначена для контакту з лопаттю і покрита захисним шаром (125) з м'якого матеріалу. При підготовці до роботи оболонку розкладають і наповнюють повітрям під підвищеним тиском, під дією якого вона приймає форму тора і стає пружною. Розподільники тросів (130) виконані з герметичної тканини, просоченої гумополімерним матеріалом, у формі циліндричних елементів (131), забезпечені клапаном (132) для заповнення повітрям, і заповнені повітрям під підвищеним тиском. Найкраща форма розподільників тросів, з'єднаних кінцями в кільцеподібну конструкцію, в плані - у вигляді сочевиці, як показано на фіг 8. З боку обох кінців розподільників тросів на ділянці А внутрішня порожнина відокремлена від центральної частини герметичною перегородкою для можливості відведення повітря тільки з ділянок А, як показано на фіг. 9. Для перенесення і збирання розподільників тросів на них виконані ручки (133). Для з'єднання розподільників тросів між собою на кінцях розподільників є з'єднувальні елементи (134). Для під'єднання до розподільників тросів каскадів тросів, внутрішня поверхня циліндричних елементів розподільників посилена такелажної стрічкою (135), до якої прикріплені вертикальні з'єднувальні елементи (136), виконані також із стрічки. Верхні кінці елементів закінчуються кільцями (137), до нижніх кінців закріплені ролики каскадів тросів. Внутрішня поверхня циліндричних елементів розподільників тросів, яка може контактувати з лопаттю, покрита захисним шаром з м'якого матеріалу (138). Каскади тросів (140) виконані у формі двох ярусів, при цьому вершиною верхнього ярусу є верхній блок (141), який закріплений на сполучному елементі (136) на розподільнику тросів, а кінці тросів нижнього ярусу (142) з'єднані з вушками зовнішніх вставок хомута (112) за допомогою швидкознімних карабінів (143), як показано на фіг. 8 і 9. 9 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 У середній частині троси нижнього ярусу перекинуті через нижні блоки (144), які прикріплені до кінців троса верхнього ярусу (145), при цьому троси верхнього ярусу в середній частині пропущені і перекинуті через верхній блок (141), який закріплений на розподільнику тросів. Каскади з двох ярусів тросів, перекинутих через блоки, забезпечують передачу тягнучого зусилля F3, прикладеного до лопаті, від сполучних тросів до хомута у вигляді рівномірно розподіленого навантаження на всі троси нижнього ярусу і всі зовнішні вставки хомута. З'єднувальні троси (150) виконані з неметалічних канатів, верхнім кінцем (151) приєднані до утримуючого кільця, а нижніми кінцями (152) приєднані до каскадів тросів. У середній частині з'єднувальні троси розділені на два кінці рівної довжини (153), кожен з яких також розділений на два кінці рівної довжини (154), як показано на фіг. 10. Пристрій для підйому та опускання лопаті ВЕУ (200) містить опорну раму (210) і допоміжну раму (220). Опорна рама виконана з висувними елементами (211) і вузлами контакту з ґрунтом (212) для можливості регулювання положення опорної рами відносно ґрунту та забезпечення горизонтального положення площини поворотною плити (213), до якої кріпиться фланець лопаті і, відповідно, забезпечення вертикального положення поздовжньої осі лопаті. У переважному варіанті виконання висувні упори і вузли контакту з ґрунтом управляються автономною гідравлічною системою. Поворотна плита виконана з можливістю повороту навколо горизонтальної осі. Для фіксації плити в горизонтальному положенні від провертання на рамі є фіксатор. Одним з варіантів виконання опорної рами можливе виконання провертання плити гідравлічними домкратами, без участі вертольота в опусканні або підніманні лопаті. Поворотна плита (213) містить отвори для закріплення через них хвостовика лопаті. Розміри поверхні контакту фланця лопаті з поворотною плитою, розташування і кількість отворів є індивідуальними для конкретної моделі лопаті ВЕУ, при цьому елементи кріплення плити до передньої рамі виконані однаковими для всіх плит, призначених для закріплення на них лопатей різних моделей ВЕУ. На плиті встановлено знімні елементи - "уловлювачі" (214) для направлення хвостовика лопаті до поверхні контакту на поворотній плиті при опусканні лопаті на плиту. Вузол кріплення поворотної плити на опорній рамі виконаний з можливістю забезпечення швидкого роз'єднання плити від рами при вертикальному положенні плити. Поворотна плита містить проушину (215) для кріплення троса вантажопідйомного засобу для зняття плити з опорної рами і переміщення її вантажопідйомним засобом. Допоміжна рама містить змінний ложемент (221) для підтримки та фіксування пера лопаті на рамі. Поворотна плита і допоміжна рама виконані з елементами для установки та закріплення їх на зовнішньому транспортному засобі, наприклад, автомобільному причепі. Лопать ВЕУ, призначену до демонтажу, встановлюють у верхнє вертикальне положення на роторі, провертаючи його. Потім фіксують ротор від провертання, а також фіксують лопать від провертання навколо поздовжньої осі лопаті. На циліндричній поверхні хвостовика лопаті, призначеної до заміни, і встановленої вертикально хвостовиком вниз, встановлюють хомут ПЗПЛ шляхом постановкикільцевого ряду внутрішніх вставок, потім на них встановлюють ряд зовнішніх вставок, далі по периметру зовнішніх вставок намотують такелажну стрічку і закріплюють її від розмотування, як показано на фіг. 1. Після цього демонтують 3/4 кріпильних елементів кріплення лопаті до втулки ротора. На майданчику розкладають утримуюче кільце і розподільники тросів ПЗПЛ і через клапан заповнюють їх повітрям під підвищеним тиском. Потім утримуюче кільце з'єднують з розподільниками тросів за допомогою з'єднувальних тросів. Далі до розподільників тросів приєднують каскади тросів. Розподільники тросів з'єднують один з одним в єдину конструкцію у формі кільця за допомогою з'єднувальних елементів. Вертоліт підлітає в точку над розкладеним на майданчику утримуючим кільцем і монтажники приєднують троси підвісної системи вертольота до утримуючого кільця. Вертоліт піднімається і разом з підйомом вертольота пристрій приймає вертикальне положення, як показано на фіг. 3. Далі вертоліт підлітає до точки над вертикально розташованою лопаттю ВЕУ і починає опускатися таким чином, щоб кільце з розподільників тросів наділося на верхній кінець лопаті. Вертоліт опускається до тих пір, щоб утримуюче кільце також наділося на верхній кінець лопаті. Вертоліт продовжує опускатися до тих пір, поки нижні троси каскадів тросів досягнуть зовнішніх вставок хомута, змонтованого на хвостовику лопаті. Вертоліт зависає. Монтажники випускають повітря з кінцевих секцій розподільників тросів (А), з'єднують підсилюючі такелажні стрічки одну 10 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 60 з одною і закріплюють кінці тросів нижнього ярусу на зовнішніх вставках хомута. Пристрій готовий до захоплення лопаті, як показано на фіг.4. Вертоліт починає підніматись, вибирає слабину тросів і призводить підвісну систему пристрою в стан натягу. При збільшенні підйомної сили вертольота ця сила F2 передається до зовнішніх вставок, і під дією цієї сили зовнішні вставки ковзають по внутрішнім вставкам уздовж поверхні контакту, як показано на фіг.11. Ковзанню сприяє мастило, нанесене на поверхні контакту. Кільце з зовнішніх вставок, обмотаних такелажної стрічкою, дещо збільшується в діаметрі і розтягує пружну такелажну стрічку ПЗПЛ. У результаті ковзання кільце із зовнішніх вставок незначно переміщується вгору по внутрішніх вставках. Такелажна стрічка додатково розтягується і з більшою силою тисне на зовнішні вставки, які з більшою силою притискають внутрішні вставки до поверхні лопаті. Сила тертя між внутрішніми вставками і поверхнею лопаті збільшується, збільшуючи зчеплення внутрішніх вставок з поверхнею лопаті. Таким чином, при збільшенні сили тяги, яка додається до з'єднувальних тросів, виникає ефект затискання хомута, який перешкоджає зрушенню внутрішніх вставок по поверхні лопаті. Рівномірність сил F2, прикладених до зовнішніх вставок, забезпечується шляхом ділення сили тяги, яка додається до з'єднувальних тросів з боку вертольота, на велике число однакових сил, рівномірно прикладених до зовнішніх вставок по колу хвостовика лопаті, як показано на фіг. 11. Розподіл відбувається за рахунок розгалуження кожного з'єднувального троса спочатку на два кінці однакової довжини, а потім кожного кінця ще на два кінці однакової довжини. Подальший розподіл сили тяги, прикладеної до нижнього кінця з'єднувального троса, відбувається в каскаді тросів, що складається з двох ярусів і трьох блоків. Розподіл відбувається за рахунок ефекту самоустановки блока під навантаженням. У двох ярусах каскаду сила тяги, прикладена до верхнього блока каскаду, ділиться на 4 рівні частини, які прикладені до кінців тросів нижнього ярусу. У кожному з 4-х з'єднувальних тросів, до якого приєднаний каскад тросів, сила тяги, що йде від утримуючого кільця, ділиться на 16 рівних складових сил, кожна з яких прикладена до однієї зовнішньої вставці хомута. Таким чином, сумарне тягнуче зусилля від всіх сполучних тросів, прикріплених до утримуваючого кільця, передається на хвостовик лопаті рівномірно через 64 внутрішні вставки. Коли тягнуче зусилля підвісної системи вертольота досягне 1/2 ваги лопаті, оператор вертольота призупиняє підйом і переводить вертоліт в режим зависання. Монтажники демонтують частину кріпильних елементів кріплення лопаті до втулки ротора, що залишилися. Потім оператор вертольота збільшує підйомну силу вертольота. Коли тягнуче зусилля підвісної системи вертольота перевищить вагу лопаті, лопать буде висіти за рахунок сили тертя між внутрішніми вставками і кільцевою поверхнею контакту вставок з хвостовиком лопаті. Таким чином, за допомогою з'єднувальних тросів, каскадів тросів і затискаючого хомута, можливо підняти і транспортувати у вертикальному положенні лопаті різних моделей ВЕУ, хвостова частина яких виконана у вигляді циліндричної поверхні. Утримуюче кільце знаходиться на рівні від 2/3 до 3/4 висоти лопаті. Кільце охоплює лопать і утримує її в вертикальному положенні від нахилу і розгойдування при підйомі лопаті і транспортуванні її у повітрі. Далі вертоліт транспортує лопать у вертикальному положенні до перевалочного майданчику з розташованим на ній пристроєм ППОЛ. При підготовці пристрою ППОЛ до роботи з лопаттю конкретної моделі ВЕУ, на опорну раму встановлюють поворотну плиту з розмірами кріплення фланця лопаті цієї моделі, а на допоміжну раму встановлюють змінний ложемент з розмірами і формою пера цієї моделі лопаті. На поворотній плиті встановлюють елементи - "уловлювачі". Опорну раму за допомогою висувних елементів (211) і регульованих вузлів контакту з ґрунтом (212) встановлюють у положення, при якому поверхня плити, до якої закріплюється фланець лопаті, займає горизонтальне положення. Поворотну плиту (213) фіксують у горизонтальному положенні від провертання. На певній відстані від опорної рами, яка дорівнює від 2/3 до 3/4 висоти лопаті, в напрямку опускання лопаті, встановлюють допоміжну раму з ложементом (220). Вертоліт з підчепленою лопаттю підлітає до перевалочного майданчика і плавно опускає лопать на поворотну плиту ППОЛ таким чином, щоб елементи кріплення лопаті увійшли в отвори плити. Для цього монтажники направляють нижню частину лопаті за допомогою "уловлювачів" у створ відповідного фланця на поворотній плиті. Після контакту лопаті з плитою вертоліт переводять в режим висіння, встановлюють і закріплюють рівномірно по колу 1/4 кріпильних елементів кріплення лопаті до поворотної плити. 11 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 60 Потім знімають фіксатор поворотною плити від провертання. Плавно переміщаючи вертоліт в горизонтальній площині і одночасно його знижуючи, опускають лопать в горизонтальне положення шляхом провертання поворотної плити, щоб лопать лягла на ложемент допоміжної рами. У міру збільшення кута відхилення лопаті від вертикального положення, утримуюче кільце ПЗПЛ сприймає збільшене навантаження від ваги лопаті F3, яке прагне розірвати кільце і досягає свого максимального значення при горизонтальному положенні лопаті перед контактом лопаті з ложементом допоміжної рами, як показано на фіг.6. Завдяки пружним властивостям утримуючого кільця, наповненого повітрям, а також шару захисного матеріалу на внутрішній поверхні кільця, за підтримки лопаті, на поверхню лопаті діє розподілене навантаження, яке передається на вушка хомута і далі на підвісну систему вертольота. Таким чином, контакт утримуючого кільця з поверхнею лопаті не приводить до пошкоджень поверхні лопаті. Після досягнення лопаттю горизонтального положення підвісну систему вертольота відчіплюють і вертоліт відлітає. Утримуюче кільце, з'єднувальні троси, розподільники тросів з каскадами тросів і хомут залишаються на лопаті. Завдяки швидкороз'ємних з'єднань ПЗПЛ розбирають по вузлах. З утримуючого кільця і розподільників тросів випускають повітря. Вузли знімають з лопаті. Потім за допомогою вантажопідйомного засобу піднімають хвостовик лопаті за вушко в поворотній плиті (213) до від'єднання поворотної плити від основної рами і переміщають хвостовик до місця розташування наземного транспортного засобу, призначеного для транспортування лопаті, і опускають плиту на вузол кріплення до транспортного засобу. Демонтаж лопаті закінчено. Транспортний засіб відвозить лопать з перевалочною майданчика. При монтажі лопаті на ВЕУ операції виконуються в порядку, зворотному демонтажу. Опорну раму ППОЛ розміщують на майданчику, пристосованому для перевалки лопаті ВЕУ. Транспортний засіб доставляє лопать до місця розташування опорної рами ППОЛ на перевалочному майданчику. Наземний вантажопідйомний засіб піднімає фланцеву частину лопаті за вушко в поворотній плиті (213), яка закріплена на фланці лопаті, до від'єднання поворотної плити від транспортного засобу. Потім вантажопідйомний засіб переносить хвостову частину лопаті до опорної рами і опускає її на поворотну плиту до зачеплення поворотної плити з віссю опорної рами. На хвостовик лопаті встановлюють хомут ПЗПЛ (110). Далі з'єднують два розподільники тросів (130), заводять їх навколо лопаті і з'єднують у кільце, як показано на фіг. 8 і 9. Для зручності маніпуляцій розподільники тросів перебувають з випущеним з них повітрям. Після цього з'єднують кінці тросів нижнього ярусу (142) з вушками зовнішніх вставок (112) по периметру хомута навколо хвостовика лопаті. Потім розкладають утримуюче кільце (120) на майданчику і наповнюють його повітрям до прийняття кільцем форми тора і досягнення кільцем пружного стану. Далі утримуюче кільце надягають на лопать з боку периферійного кінця лопаті і розташовують його на відстані 2/3 від хвостовика лопаті. З'єднувальними тросами (150) з'єднують вушка утримуючого кільця (123) з кільцями (137) на розподільниках тросів. Далі підлітає вертоліт і опускається до висоти, при якій троси підвісної системи вертольота досягають вушок утримуючого кільця (123). Вертоліт зависає, при цьому троси підвісної системи закріплюють у вушках утримуючого кільця. Потім вертоліт починає підйом. Через підвісну систему вертольота і утримуюче кільце (120) вертоліт починає піднімати периферійну частину лопаті. Плита, на якій закріплений фланець лопаті, починає провертатися навколо осі, що проходить в місці з'єднання поворотної плити з опорною рамою, і переходить з вертикального в горизонтальне положення. Відповідно, лопать переходить з горизонтального положення у вертикальне. Після досягнення лопаттю вертикального положення поворотну плиту фіксують в горизонтальному положенні. Вертоліт натягує підвісну систему з ПЗПЛ і зависає. Монтажники відгвинчують елементи кріплення лопаті на поворотній плиті. Після відгвинчування всіх елементів кріплення вертоліт піднімається і піднімає лопать вертикально вгору. Після виходу елементів кріплення лопаті з отворів в поворотній плиті, лопать вивільняється. Вертоліт відлітає з підчепленою лопаттю до місця її монтажу на ВЕУ. Основною перевагою способу заміни лопаті ВЕУ за допомогою вертольота є скорочення обсягів робіт за рахунок виключення використання великогабаритного підйомного крана і, відповідно, підготовки майданчика, доставки і збирання крана, а також розбирання крана після виконання заміни. 12 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 60 Перевагою способу також є незалежність процесу від стану дороги після опадів, від засніженій і обледенілій дорозі до ВЕУ, по якій складно, довго або неможливо транспортувати лопаті і великогабаритний підйомний кран. Істотною перевагою заміни лопаті за допомогою вертольота є можливість транспортування лопаті у повітрі замість наземного транспортування по дорозі зі складним рельєфом, на значну відстань до зручного майданчика біля дороги загального призначення. Додатковою перевагою способу є знімання і встановлення лопаті у вертикальному положенні фланцем донизу, що дозволяє використовувати менш складний спосіб монтажу вертольотом типу "опустив стійкий вантаж у створ уловлювачів, відчепився і полетів", з мінімальним обсягом зворотно-поступальних маневрів вертольота і мінімальною тривалістю режиму висіння. Використання надувних пружних пристосувань - утримуючого кільця і розподільників тросів дозволяє зберегти пристроям форму під навантаженням і забезпечити технічний результат, при цьому пристрої мають малі розміри у складеному стані і вагу. Використовувані пристрої дозволяють гнучко налаштувати і скомплектувати їх деталями для заміни або монтажу різних лопатей з різними габаритами і приєднувальними розмірами. Джерела інформації: [1] Відомчі будівельні норми Мінмонтажспецбуду СРСР "Монтаж будівельних конструкцій із застосуванням вертольотів", ВСН 463-85, 1986. [2] Барон P.M., Макаров К.Н. Виробництво монтажних робіт за допомогою вертольотів. М. Стройиздат, 1984. [3] Вертольоти, що виконують монтажні роботи з вантажем http://ru.wikipedia.org/wiki/Летающий кран [4] Характеристики вертольота-крана Sikorsky S-64 http://en.wikipedia.orq/wiki/Sikorskv S-64 Skycrane [5] Характеристики вертольота МІ-26Т з кабіною оператора монтажних робіт http://www.airwar.ru/enc/ch/mi26t.html http://www.enqine-market.ua/articles/vertolet-mi-26-qordost-i-mosch/ [6] Опис модернізованого вертольота МІ-26Т2 http://www.mi-helicopter.ru [7] Монтаж опори лінії електропередачі в горах за допомогою вертольота S-64 http://www.youtube.com/watch?v=iTfx9n2lmMc&feature=relmfu - частина 1 http://www.youtube.com/watch?v=YdynKxCloUQ&feature=related - частина 2 http://www.youtube.com/watch?v=HaPVnXEII_Y&feature=relmfu - частина 3 [8] Монтаж телевежі заввишки 256м в м. Москва вертольотом МІ-26Т, 2006 р. http://www.youtube.com/watch?v=uwslbxKke-l [9] Монтаж ротора ВЕУ http://www.youtube.com/watch?v=53q c45tDUM [10] Монтаж ротора ВЕУ моделі Е82 фірми Enercon http://www.youtube.com/watch?NR=1&v=6HMulMVdMpc&feature=endscreen [11] Монтаж ВЕУ моделі Е-82 краном Demag/Теrех ТС2800-1 http://www.youtube.com/watch?v=8TXLIda qcs [12] Монтаж ВЕУ моделі Vestas V90-3MW http://www.youtube.com/watch?v=YF8dYG7dPPs http://www.youtube.com/watch?v=IZWREtovY3s&feature http://www.voutube.com/watch?v=sNkma5h Sbl http://www.youtube.com/watch?v=67glaBjXi E фото [13] Перевезення крана фірми Manitowoc-16000 і збірка на майданчику біля ВЕУ http://forums.dhsdiecast.com/default.aspx?q=posts&t=128817 [14] Складність доставки лопаті ВЕУ http://www.youtube.com/watch?v=dou4QDRKTVc&feature=related [15] Доставка вузлів ВЕУ і монтаж установки http://www.youtube.com/watch?v=r0DZUDQyw 0&feature=related [16] Вимоги до транспортування вузлів ВЕУ V90-3.0MW "Transport Manual V90-3.0MW. Guiding Information on Minimum Requirements of Transport". [17] Необхідність рівної площадки для роботи крана, збирання ротора на землі, монтаж ВЕУ 1.5MW http://www.youtube.com/watch?v=tjATpb6hr7A&feature=related [18] Складність доставки крана і вузлів ВЕУ до місця монтажу (фото) http://www.youtube.com/watch?v=C316Edfaqs 13 UA 114800 C2 5 10 [19] Вимоги до доріг для транспортування вузлів і майданчиків для крана для збирання ВЕУ Enercon Е-82 "Access Roads and Crane Platforms E-82/77m steel tower» [20] Розгортання крана фірми Sarens http://www.youtube.com/watch?v=eZmhmRI703E&feature=related http://www.youtube.com/watch?v=ESOiJ ILX9c&feature=related [21] Розгортання крана фірми Liebherr http://www.youtube.com/watch?v=ir9nzqVXUWU&feature=fvwrel http://www.youtube.com/watch?v=L Wb8Y OGzU&feature=related [22] Монтаж ВЕУ моделі Nordex N100/2500 http://www.youtube.com/watch?v=hM6mr1RYKkl ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 50 55 1. Спосіб демонтажу і монтажу (заміни) лопаті ротора промислової вітроелектричної установки (ВЕУ), який характеризується тим, що при демонтажі лопаті: лопать, що демонтується, встановлюють у верхнє вертикальне положення, провертаючи ротор ВЕУ, фіксують ротор від провертання, а також фіксують лопать від провертання навколо поздовжньої осі лопаті; після цього виконують зняття і транспортування лопаті, які здійснюють за допомогою вертольота, обладнаного підвісною системою для транспортування вантажів на зовнішній підвісці, а також пристроєм захоплення і підйому лопаті (ПЗПЛ), що включає утримувальне кільце, з'єднувальні троси, розподільники тросів з кільцем і каскадами тросів, що закінчуються петлями, а також хомут; для цього на циліндричній поверхні лопаті біля фланця збирають і закріплюють хомут ПЗПЛ, на якому є вушка; демонтують більшу частину кріпильних елементів кріплення лопаті до втулки ротора; далі плавно знижують вертоліт таким чином, щоб кільце з розподільників тросів і утримувальне кільце послідовно вдяглися на лопать, а петлі тросів досягли вушок хомута; після чого забезпечують зависання вертольота; петлі тросів каскадів тросів з'єднують з вушками хомута; за допомогою повільного підйому вертольота вертикально вгору доводять підвісну систему і ПЗПЛ до стану натягу, і підтримують натяг за допомогою зависання вертольота; потім під час зависання вертольота демонтують елементи кріплення лопаті, які залишилися на втулці ротора; далі збільшують натяг ПЗПЛ понад вагу лопаті, направляючи вертоліт вертикально вгору і від'єднують лопать від втулки ротора; демонтовану лопать транспортують вертольотом у вертикальному положенні фланцем донизу до майданчика вантаження з розташованим на ній пристроєм для підняття та опускання лопаті (ППОЛ), що містить основну раму з поворотною плитою, фланцем, уловлювачами, розташованими по колу фланця поворотної плити, і допоміжну раму з ложементом; доставлену лопать плавно опускають вертикально шляхом зниження вертольота до моменту потрапляння фланця лопаті між уловлювачами до зіткнення фланця лопаті з поворотною плитою; після чого вертоліт переводять в режим висіння і, утримуючи його в цьому положенні, встановлюють частково кріпильні елементи кріплення лопаті до поворотної плити; потім, плавно переміщаючи вертоліт в горизонтальній площині і одночасно його знижуючи, опускають лопать в горизонтальне положення за допомогою провертання поворотної плити і укладають лопать на ложемент, з можливістю зняття утримуючого кільця з лопаті; далі відчіплюють петлі канатів підвісної системи вертольота від вушок утримуючого кільця і вертоліт з підчепленою підвісною системою відлітає; з лопаті знімають хомут, утримуюче кільце, розподільники тросів з каскадами тросів, і приводять (упорядковують) ці вузли до робочого стану для встановлення їх на лопать, призначену до монтажу на ВЕУ замість знятої; потім, використовуючи підйомний пристрій, піднімають хвостовик лопаті за поворотну плиту до від'єднання поворотної плити від основної рами і переміщують його до місця розташування наземного транспортного засобу, опускають і закріплюють плиту на наземному транспортному засобі; транспортний засіб із закріпленою на ньому лопаттю відвозять від місця розташування основної рами ППОЛ на майданчику; 14 UA 114800 C2 5 10 15 20 25 30 35 40 45 50 55 60 лопать, призначену для монтажу на втулку ротора ВЕУ замість знятої, підвозять на транспортному засобі на майданчик на місце розташування знятої лопаті, і за допомогою згаданих вище пристроїв надають їй положення, аналогічне до знятої лопаті; подальшу установку лопаті на втулку ротора ВЕУ здійснюють у порядку, зворотному зняттю лопаті. 2. Спосіб за п. 1, в якому використовують хомут ПЗПЛ, який виконаний з можливістю збільшення сили тиску хомута на поверхню лопаті при збільшенні сили, прикладеної до хомута вздовж циліндричної поверхні лопаті. 3. Спосіб за п. 1, в якому перед від'єднанням лопаті демонтують 3/4 кріпильних елементів кріплення лопаті до фланця втулки ротора, або залишають мінімальну кількість кріпильних елементів, необхідну для підтримки лопаті у вертикальному положенні протягом короткого часу до підчеплення підвісної системи вертольота до лопаті; при фіксації лопаті на ППОВ встановлюють рівномірно по колу 1/4 кріпильних елементів кріплення фланця лопаті до фланця поворотної плити, або встановлюють мінімальну кількість кріпильних елементів, необхідну для утримання лопаті під час наземного транспортування; під час зняття кріпильних елементів кріплення лопаті на втулці ротора ВЕУ, натяг підвісної системи доводять до рівня від 1/2 до 3/4 від ваги лопаті. 4. Пристрій для захоплення і підйому лопаті промислової ВЕУ вертольотом при здійсненні способу за будь-яким із пп. 1-3, який містить: хомут, що затягується, виконаний у вигляді концентрично розташованих рядів внутрішніх і зовнішніх клиновидних вставок, що утримуються такелажною стрічкою, намотаною в кілька шарів по колу зовнішнього ряду вставок, при цьому ряд внутрішніх клиновидних вставок утворює кільце з діаметром, рівним діаметру циліндричного хвостовика лопаті, а ряд зовнішніх клиновидних вставок утворює кільце з діаметром, рівним зовнішньому діаметру кільця, утвореного внутрішнім рядом клиновидних вставок, крім того, внутрішні і зовнішні вставки мають клиновидний профіль перерізу в напрямку вздовж циліндричної поверхні лопаті, причому вставки внутрішнього ряду виконані з пружного полімерного матеріалу, а вставки зовнішнього ряду виконані з твердого полімерного матеріалу або легкого металу; утримуюче кільце, виконане у вигляді заповненого повітрям торовидного елемента і оснащене елементами для кріплення до підвісної системи вертольота; розподільники тросів, виконані у вигляді заповнених повітрям циліндричних елементів, з'єднаних кінцями в кільце і оснащених елементами для їх кріплення до каскадів тросів і з'єднувальних тросів; каскади тросів, виконані з декількох ярусів, при цьому кінці тросів нижнього ярусу з'єднані з вушками на зовнішніх клиновидних вставках хомута; з'єднувальні троси, що з'єднують згадані утримуюче кільце, розподільники тросів і каскади тросів в єдину конструкцію. 5. Пристрій за п. 4, в якому обидва кінці такелажної стрічки закріплені на вставках зовнішнього ряду, перешкоджаючи її розмотуванню. 6. Пристрій за п. 4, в якому поверхня внутрішніх клиновидних вставок, яка стикається з лопаттю, виконана увігнутою з радіусом, рівним радіусу циліндричної поверхні хвостовика лопаті, а поверхні внутрішніх і зовнішніх клиновидних вставок, які стикаються одна з одною, виконані плоскими. 7. Пристрій за п. 4 або п. 6, в якому поверхня внутрішніх клиновидних вставок, яка стикається з лопаттю, покрита абразивною пастою, а поверхні внутрішніх і зовнішніх клиновидних вставок, які стикаються одна з одною, покриті мастилом, що сприяє ковзанню вставок одна щодо одної. 8. Пристрій за п. 4, в якому утримуюче кільце і розподільники тросів виконані з герметичного гнучкого матеріалу, і оснащені кранами для наповнення їх повітрям під підвищеним тиском і випуску повітря. 9. Пристрій за п. 4 або п. 8, в якому внутрішня поверхня утримуючого кільця, яка звернена до поверхні лопаті, а також зовнішня поверхня по периметру посилені такелажними стрічками, при цьому на внутрішній поверхні утримуючого кільця до такелажної стрічки рівномірно по колу прикріплені металеві кільця і петлі для закріплення з'єднувальних тросів рівномірно по периметру утримуючого кільця, а поверхні розподільників тросів, які звернені до поверхні лопаті, посилені такелажними стрічками, до яких прикріплені металеві кільця і петлі, призначені для закріплення з'єднувальних тросів і каскадів тросів. 10. Пристрій за п. 4, в якому кріплення розподільників тросів між собою виконані швидкороз'ємними. 11. Пристрій за пп. 4, 8 або 9, в якому поверхні утримуючого кільця і розподільників тросів, які стикаються з поверхнею лопаті, покриті захисним м'яким матеріалом. 15 UA 114800 C2 5 10 15 20 25 12. Пристрій за п. 4, в якому кожен кінець троса нижнього ярусу каскадів тросів з'єднаний з вушком одної зовнішньої клиноподібної вставки хомута, при цьому в середній частині трос перекинутий через блок, який прикріплений до кінця троса вищерозташованого ярусу, при цьому кожен трос вищерозташованого ярусу обома кінцями з'єднаний з блоками, а в середній частині трос перекинутий через блок, який з'єднаний з тросом наступного ярусу над вищерозташованим ярусом, при цьому каскади містять два яруси тросів, перекинутих через блоки. 13. Пристрій за п. 4, в якому розподільники тросів розміщені по висоті лопаті в місці стику сполучних тросів з верхнім ярусом каскадів тросів. 14. Пристрій підйому та опускання лопаті при здійсненні способу за будь-яким із пп. 1-3, який містить: опорну раму для закріплення хвостовика лопаті ВЕУ, виконану з висувними елементами і регульованими упорами з вузлами контакту з ґрунтом, поворотну знімну плиту з фланцем, встановлену на опорній рамі з можливістю повороту плити навколо горизонтальної осі, фіксації плити в горизонтальному положенні від провертання, і можливістю швидкого від'єднання плити від опорної рами і швидкого під'єднання плити до опорної рами у вертикальному положенні плити; допоміжну раму з ложементом для закріплення пера лопаті, при цьому опорна і допоміжна рами виконані з можливістю їх установки на транспортувальний засіб. 15. Пристрій за п. 14, в якому поворотна знімна плита оснащена отворами для входження в них кріпильних елементів, встановлених на фланці лопаті. 16. Пристрій за п. 14 або п. 15, в якому поворотна знімна плита оснащена напрямними елементами - "уловлювачами", для орієнтації хвостовика лопаті. 17. Пристрій за п. 14, в якому опорна рама пристрою виконана з можливістю регулювання та фіксування її положення відносно поверхні ґрунту за допомогою висувних елементів і регульованих упорів з вузлами контакту з ґрунтом. 16 UA 114800 C2 17 UA 114800 C2 18 UA 114800 C2 19 UA 114800 C2 20 UA 114800 C2 21 UA 114800 C2 22 UA 114800 C2 23 UA 114800 C2 Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 24
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64D 9/00, B64D 1/22, F03D 13/40, B64D 1/08, B66F 11/00, F03D 13/10
Мітки: пристрої, монтажу, ротора, цьому, заміни, застосовуються, спосіб, установки, лопати, демонтажу, вітроелектричної, промислової
Код посилання
<a href="https://ua.patents.su/26-114800-sposib-demontazhu-i-montazhu-zamini-lopati-rotora-promislovo-vitroelektrichno-ustanovki-ta-pristro-yaki-zastosovuyutsya-pri-comu.html" target="_blank" rel="follow" title="База патентів України">Спосіб демонтажу і монтажу (заміни) лопаті ротора промислової вітроелектричної установки та пристрої, які застосовуються при цьому</a>
Пристрій для монтажу і демонтажу лопаті робочого колеса поворотно-лопатевої гідротурбіни

Номер патенту: 63050
Опубліковано: 26.09.2011
Автори: Зудочкин Ігор Степанович, Колганенко Вячеслав Іванович, Сіренко Олег Володимирович, Шилов Валерій Павлович, Веремеєнко Ігор Степанович
МПК: F03B 11/00
Мітки: лопати, гідротурбіни, робочого, демонтажу, поворотно-лопатевої, колеса, пристрій, монтажу
Формула / Реферат:
Пристрій для монтажу і демонтажу лопаті робочого колеса поворотно-лопатевої гідротурбіни, що містить дві групи елементів, встановлені в двох отворах фланця лопаті, і одну групу елементів, встановлену в отворі пера лопаті, які сполучені з краном за допомогою тросів, який відрізняється тим, що група елементів, встановлена в отворі фланця лопаті, містить розрізну втулку з внутрішньою конусною поверхнею, що встановлена в отворі фланця і виконана...
Спосіб демонтажу ушкодженої промислової установки, об’єкт укриття ушкодженої промислової установки та спосіб його зведення
Номер патенту: 83462
Опубліковано: 25.07.2008
Автори: Александрофф Грегуар, Александрофф Жорж
МПК: G21F 7/00
Мітки: промислової, укриття, зведення, установки, об`єкт, ушкодженої, демонтажу, спосіб
Формула / Реферат:
1. Спосіб демонтажу ушкодженої частини промислової установки (10), що представляє небезпеку для людей, яка примикає до неушкодженої частини промислової установки (28), що має захисні властивості від впливу небезпечних речовин, який відрізняється тим, що включає укриття ушкодженої частини (10) об'єктом укриття (30), який закриває її практично герметично, і дезактивацію ушкодженої частини (10) шляхом доступу до неї через неушкоджену частину...
Спосіб роботи вітроелектричної установки
Номер патенту: 76039
Опубліковано: 25.12.2012
Автор: Сафонов Володимир Олександрович
МПК: F03D 11/02
Мітки: спосіб, установки, вітроелектричної, роботи
Формула / Реферат:
1. Спосіб роботи вітроелектричної установки, що містить ротор з лопатями і електрогенератор, що включає дію повітряного потоку на її лопаті і перетворенні енергії вітрового потоку в механічну енергію, а потім в електричну енергію, який відрізняється тим, що в лопаті подають паливо і спалюють його в реактивному пальнику у фазі підняття лопаті, і створюючи переміщення реактивного пальника у напрямі осі лопаті, забезпечують підведення повітря з...
Спосіб монтажу багатолопатевого ротора вітродвигуна із міцним зовнішнім кільцем аеродинамічної форми
Номер патенту: 84787
Опубліковано: 25.11.2008
Автор: Ізосімов Євген Сергійович
МПК: F03D 1/06
Мітки: зовнішнім, спосіб, ротора, міцним, монтажу, форми, аеродинамічної, вітродвигуна, кільцем, багатолопатевого
Формула / Реферат:
1. Спосіб монтажу багатолопатевого ротора вітродвигуна, що перетворює енергію вітрового потоку в енергію обертання вала електрогенератора, з віссю обертання, паралельною вітровому потоку, радіально розташованими лопатями з регульованими кутами установки, з міцним зовнішнім кільцем з хордою, паралельною повітряному потоку, при якому почергово підняті краном лопаті гвинтами закріплюють до розташованої на башті втулки ротора, який відрізняється...
Спосіб автоматичного складання, збереження та відновлення інформації в телефонних адресних книгах у безпровідному пристрої зв’язку та у sim-карті, яка використовується в цьому пристрої
Номер патенту: 6801
Опубліковано: 16.05.2005
Автор: Бірюков Сергій Олександрович
МПК: H04M 1/247, H04M 3/487, H04M 1/274, H04M 3/42
Мітки: sim-карті, безпровідному, використовується, яка, складання, цьому, пристрої, збереження, інформації, автоматичного, відновлення, спосіб, книгах, телефонних, адресних, зв'язку
Формула / Реферат:
1. Спосіб автоматичного складання, збереження і відновлення інформації в телефонних адресних книгах у безпровідному пристрої зв'язку та у sim-карті, яка використовується в цьому пристрої, що включає в себе активацію функції, шляхом відправлення з безпровідного пристрою зв'язку за допомогою безпровідної технології зв'язку активаційного запиту до віддаленого сховища інформації, яке після активації послуги приймає від безпровідного пристрою...
Попередній патент: Реактор газифікації
Наступний патент: Пристрій та спосіб контролю гостроти різальної крайки
Випадковий патент: Опалубний щит