Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Войченко Оксана Олександрівна
Формула / Реферат
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку демпфірування подовжньої кутової швидкості за умови збігу напрямку вектора поперечної кутової швидкості з напрямком однієї з поперечних осей після демпфірування подовжньої кутової швидкості, забезпечують демпфірування подовжньої кутової швидкості за рахунок включення керуючих двигунів у подовжньому каналі, потім включають двигуни, що створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, чим забезпечують демпфірування поперечних кутових швидкостей.
Текст
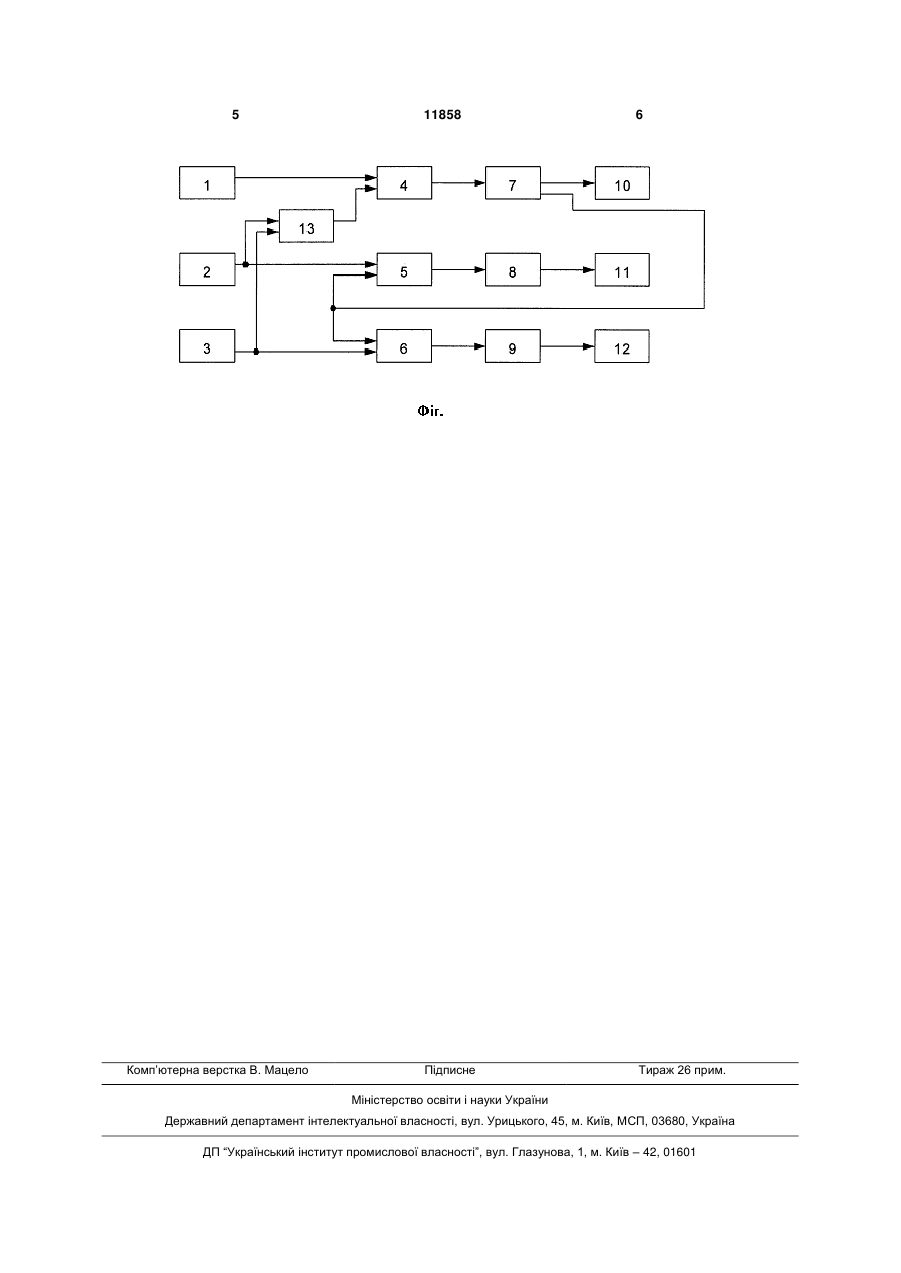
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для 3 11858 4 мічного літального апарата з реактивними викодкості змінюються в часі від 0 до r0. Коли напрямок навчими органами. поперечної кутової швидкості збігається з віссю Y, Система містить датчик подовжньої кутової тоді у=r0, z=0, а якщо з віссю Z- у=0, z=r0. В цей швидкості 1, датчик першої поперечної кутової час необхідно демпфірувати подовжню кутову швидкості 2, датчик другої поперечної кутової швидкість, тоді поперечна кутова швидкість не швидкості 3, блок 4 підключення датчика 1, блок 5 змінюється і збігається з віссю Y чи віссю Z. При підключення датчика 2, блок 6 підключення датчицьому при демпфіруванні поперечної кутової швика 3, блок 7 керування виконавчими органами подкості мінімізується витрата робочого тіла через довжнього каналу, блок 8 керування виконавчими коллинеарність векторів поперечної кутової швидорганами першого поперечного каналу, блок 9 кості і керуючого моменту. керування виконавчими органами другого попереСистема функціонує в такий спосіб: за допочного каналу, виконавчі органи подовжнього канамогою датчиків 1, 2, 3 виміряють три складові кулу 10, виконавчі органи першого поперечного катової швидкості, що через блоки підключення 4, 5, налу 11, виконавчі органи другого поперечного 6 з'єднані з блоками керування 7, 8, 9. Блоки керуканалу 12, блок 13 визначення початку демпфірування 7, 8, 9 виробляють керуючі сигнали на виковання подовжньої швидкості. навчі органи 10, 11, 12. Одночасно складові попеПісля відділення космічного апарата від носія речної кутовий швидкості з датчиків 2, 3 надходять виникають початкові кутові швидкості, які необхідна входи блока визначення початку гасіння кутоно демпфірувати. Запропонований спосіб дозвових швидкостей 13, вихід якого підключений до ляє вирішити цю задачу, забезпечуючи мінімізацію другого входу блока 4. Сигнал про момент закінвитрат робочого тіла. чення демпфірування подовжньої кутової швидкоРівняння руху для осесиметричного космічного сті з другого виходу блока 7 надходять на другі апарата в зв'язаній системі координат OXYZ входи блоків 5, 6. (приймемо, що віссю симетрії є вісь X) записуютьРозглянемо процеси управління при демпфіся в наступному вигляді (збурюючі моменти перуванні подовжньої х і поперечних кутових швидредбачаються малими і не враховуються) [див. костей. У блоці 13 визначаються необхідні значенАлексеев К.Б., Бебенин Г.Г. Управление космичесня поперечних кутових швидкостей, при яких кими летательными аппаратами. М., "Машиностнеобхідно починати демпфірування подовжньої роение", 1974. 340с.]: кутової швидкості, щоб забезпечити після демпфірування подовжньої кутової швидкості збіг напряX mX ; мку вектора поперечної кутової швидкості з наX a Z X mY ; прямком однієї з поперечних осей Z чи Y. З врахуванням цього витримують паузу без керуZ a Y X mZ , (1) вання до моменту, поки обмірювані поперечні куде X, Y, Z - проекції кутової швидкості костові швидкості з датчиків 2, 3 не збіжаться з необмічного апарата на осі зв'язаної системи коордихідними, після чого блок 13 через блоки 4 і 7 нат: включає виконавчі органи подовжнього каналу 10, X - подовжня кутова швидкість; що потім виключаються блоком 7 після демпфіруY - перша поперечна кутова швидкість; вання подовжньої кутової швидкості ( X=0). У реZ - друга поперечна кутова швидкість; зультаті подовжня й одна з поперечних кутових mX, mY, mZ - проекції приведеного керуючого швидкостей будуть дорівнювати нулю, а друга моменту; поперечна швидкість буде дорівнювати r0. а - константа. Потім по інформації з другого виходу блока 7 Вважаємо, що в початковий момент часу через блоки 5 і 8 включаються виконавчі органи складові кутової швидкості задовольняють співвід11, якщо напрямок вектора поперечної кутової ношенню = i0, i=X,Y,Z. Знайдемо вільний рух швидкості збігається з віссю Y, і через блоки 6, 9 апарата шляхом інтегрування системи (1) при включаються виконавчі органи 12, якщо напрямок mi=0: вектора поперечної кутової швидкості збігається з X X0 ; віссю Z. Виконавчі органи 11 виключаються блоr0 sin ; r0 cos , (2) Y Z 2 Y0 тової швидкості; де r0 2 Z0 - модуль поперечної ку Y0 - кут між напрямком X0 t arctg Z0 поперечної кутової швидкостіі віссю Z. Згідно з формулою (2) поперечна кутова швидкість перерозподіляється між проекціями на осі Y і Z, при цьому перша і друга поперечні кутові швиa ком 8 після демпфірування поперечної кутової швидкості ( Y=0), а виконавчі органи 12 виключаються блоком 9 після демпфірування поперечної кутової швидкості ( Z=0). В результаті поперечні кутові швидкості будуть дорівнювати нулю. Таким чином, запропонований спосіб дозволяє забезпечити демпфірування початкових кутових швидкостей космічного літального апарата навколо трьох осей за допомогою реактивних виконавчих органів з мінімальною витратою робочого тіла. 5 Комп’ютерна верстка В. Мацело 11858 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of damping the angular velocities of axially symmetrical space vehicle
Автори англійськоюBandura Ivan Mykolaiovych
Назва патенту російськоюСпособ демпфирования угловых скоростей осесимметричного космического летательного аппарата
Автори російськоюБандура Иван Николаевич
МПК / Мітки
МПК: B64G 1/24
Мітки: кутових, вісесиметричного, апарата, космічного, спосіб, демпфірування, швидкостей, літального
Код посилання
<a href="https://ua.patents.su/3-11858-sposib-dempfiruvannya-kutovikh-shvidkostejj-visesimetrichnogo-kosmichnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата</a>
Спосіб розвантаження системи силових гіроскопів космічного апарата
Номер патенту: 62147
Опубліковано: 15.12.2003
Автори: Успенський Валерій Борисович, Голоскоков Євген Григорович, Кузнєцов Юрій Олексійович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: розвантаження, гіроскопів, системі, спосіб, силових, космічного, апарата
Формула / Реферат:
Спосіб розвантаження системи силових гіроскопів космічного апарата, який полягає в тому, що вимірюють вектор нагромадженого кінетичного моменту системи силових гіроскопів, вимірюють вектор абсолютної кутової швидкості космічного апарата, визначають сумарний вектор кінетичного моменту космічного апарата, виконують розвантаження за допомогою реактивних двигунів орієнтації, який відрізняється тим, що фіксують момент досягнення допустимого...
Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу
Номер патенту: 63285
Опубліковано: 15.01.2004
Автори: Пашков Дмитро Павлович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 11/00
Мітки: вимірювання, частотно-часового, модернізованого, апаратів, основі, канал, кутових, швидкостей, літальних, методу
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод, передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд, підсилювачі у вигляді фільтрів сигналів похибок та виконавчі пристрої керування кутами азимута і місця, який відрізняється тим, що додатково після...
Спосіб формування керуючого моменту для космічного апарата
Номер патенту: 65322
Опубліковано: 15.03.2004
Автори: Кузякін Юрій Петрович, ТРОНЬ ЮРІЙ ОПАНАСОВИЧ
МПК: B64G 1/28
Мітки: моменту, керуючого, формування, спосіб, апарата, космічного
Формула / Реферат:
Спосіб формування керуючого моменту для космічного апарата шляхом використання кінетичного моменту, що створюється двигуном-маховиком, який відрізняється тим, що вимірюють кутову швидкість першого електроприводу, отримане значення масштабують, алгебраїчно сумують з сигналом завдання та формують сигнал управління другим електроприводом пропорційно отриманій різниці, вимірюють сигнал другого електроприводу, отримане значення масштабують та...
Спосіб нейтралізації електростатичного заряду поверхні космічного апарата та його частин
Номер патенту: 73462
Опубліковано: 15.07.2005
Автор: Хитько Андрій Володимирович
МПК: F03H 1/00
Мітки: електростатичного, поверхні, частин, заряду, космічного, апарата, нейтралізації, спосіб
Формула / Реферат:
Спосіб нейтралізації електростатичного заряду поверхні космічного апарата та його часток, що включає перенесення електростатичного заряду у кулонах, який відрізняється тим, що перенесення електростатичного заряду здійснюють по стаціонарному мосту квазінейтральної плазми, який утворюють між космічним апаратом і плазмою космічного простору або між окремими електрично ізольованими одна від одної частками космічного апарата.
Датчик кутових швидкостей
Номер патенту: 64585
Опубліковано: 16.02.2004
Автори: Лещенко Олена Володимирівна, Гордін Олександр Григорович, Кулік Анатолій Степанович
МПК: G01C 19/00
Мітки: кутових, швидкостей, датчик
Формула / Реферат:
1. Датчик кутових швидкостей, що складається з вимірника кутових швидкостей, що містить гіромотор із твердотільним швидкообертовим ротором як носій кінетичного моменту, і вимірника кутових прискорень, що являє собою збалансовану щодо осі підвісу інерційну масу, виконаних у вигляді двох поплавкових камер із двома датчиками вихідної інформації і датчиками моменту, що розміщені усередині відповідної поплавкової камери і кожний з яких...
Попередній патент: Спосіб визначення днк збудників хламідійних інфекцій у мультиплексній полімеразній ланцюговій реакції
Наступний патент: Пристрій управління пресом для виготовлення багатошарових печатних та монтажних плат
Випадковий патент: Пристрій очищення газоповітряного середовища ізольованого приміщення від твердої фази диму при пожежі