Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу
Номер патенту: 63285
Опубліковано: 15.01.2004
Автори: Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Пашков Дмитро Павлович
Формула / Реферат
Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод, передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд, підсилювачі у вигляді фільтрів сигналів похибок та виконавчі пристрої керування кутами азимута і місця, який відрізняється тим, що додатково після селектора подовжніх мод послідовно введений блок дефлекторів, керування яким здійснюється введеними блоком керування дефлекторами та керуючим елементом, після фотодетектора послідовно введений широкосмуговий підсилювач за яким , для отримання інформації про кутові швидкості ![]() і
і ![]() , послідовно введені резонансні підсилювачі, які настроєні на відповідні частоти міжмодового биття
, послідовно введені резонансні підсилювачі, які настроєні на відповідні частоти міжмодового биття ![]() ,
,![]() ,
,![]() ,
,![]() по каналах кутових швидкостей
по каналах кутових швидкостей ![]() і
і ![]() ,
, ![]() оп -введення опорних сигналів з частотами
оп -введення опорних сигналів з частотами ![]() оп,
оп, ![]() оп,
оп,![]() оп,
оп,![]() оп від передавального лазера, формувачі імпульсів, 1|0 - тригери, схеми “і”, реверсивні лічильники, схеми порівняння, електронно-цифрові обчислювальні машини та блоки відображення вимірювальної інформації по каналах кутових швидкостей
оп від передавального лазера, формувачі імпульсів, 1|0 - тригери, схеми “і”, реверсивні лічильники, схеми порівняння, електронно-цифрові обчислювальні машини та блоки відображення вимірювальної інформації по каналах кутових швидкостей ![]() і
і ![]() .
.
Текст
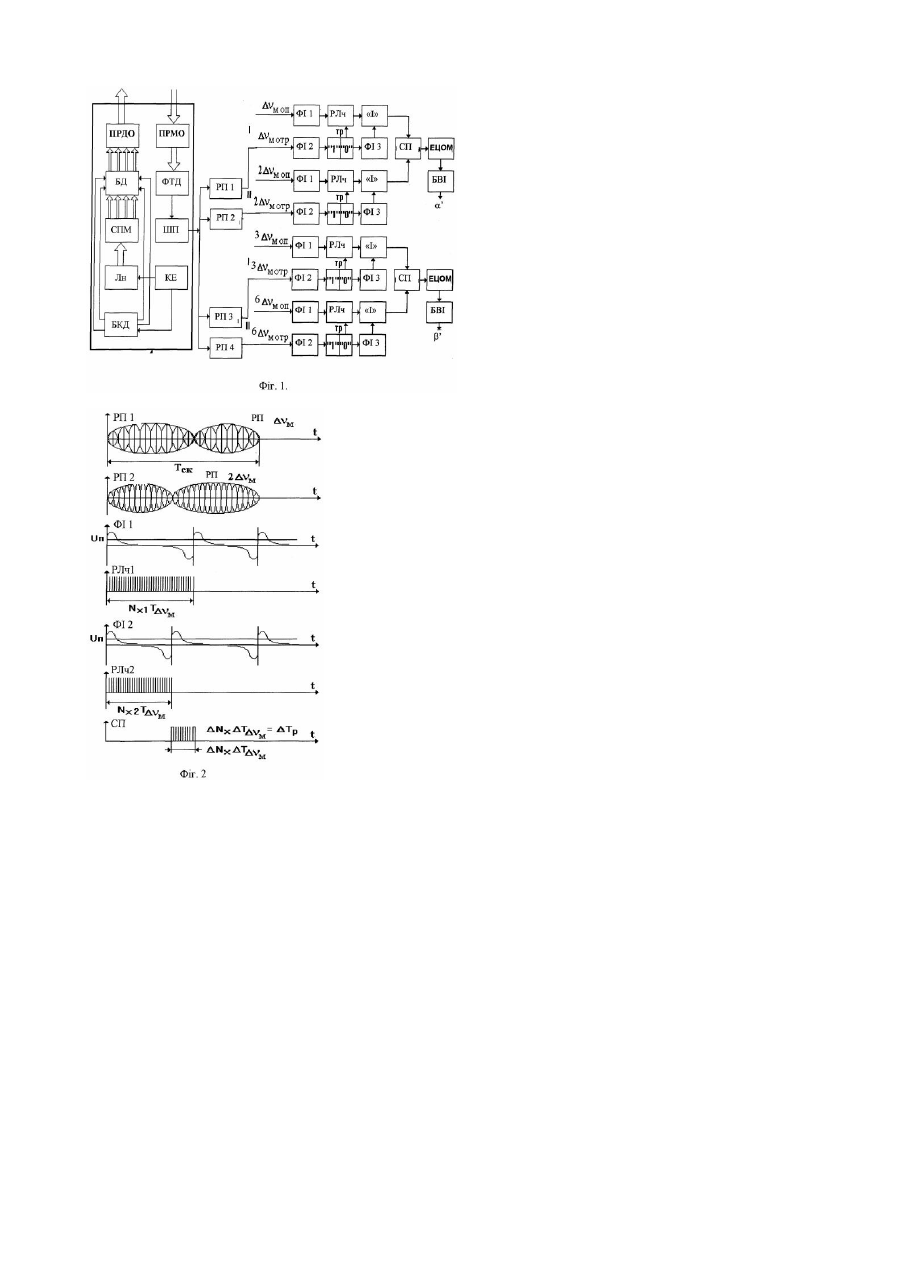
Запропонований винахід відноситься до галузі лазерних систем і може бути використаний для побудови шестипараметричної лазерної вимірювальної системи (ЛВС), яка забезпечить високі точностні характеристики вимірювання параметрів руху (ВПР) і стійке кутове автосупроводження літального апарата (ЛА) за умовами використання модернізованого частотно-часового методу (ЧЧМ) вимірювання та вимірювальної інформації від каналу кутови х швидкостей у фільтрі нижніх частот (ФНЧ) каналу автоматичного супроводження ЛА за напрямком (АСН). Відома квантово-оптична система «Сажень» [1], яка включає канали вимірювання похилої дальності R та кутів азимута a і міста b . У цієї системі забезпечується вимірювання похилої дальності, неоперативне вимірювання кутів азимута і міста по зіркам при супроводженні космічного апарату (КА) за програмою по телевізійним каналам. Недоліками системи „Сажень" є мала точність вимірювання дальності на великій відстані до КА та кутів азимута і міста, неоперативність супроводження та неможливість вимірювання кутових швидкостей (тангенціальної складової швидкості) і радіальної швидкості КА. Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є „Система автоматичного супроводження ЛА за напрямком на багатомодових лазерах" [2], яка вміщує послідовно з'єднанні лазер з блоком лазерної накачки, селектор подовжніх мод (СПМ), передавальну оптику, прийомну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП), пристрій сигналу похибки (ПСП), виконавчій пристрій (ВП) та додатково може бути доповнена каналами вимірювання похилої дальності R і радіальної швидкості R'. Система забезпечує автосупроводження ЛА за напрямком при одночасному вимірюванні R, R' та кутів азимута і міста. Недоліком системи-прототипу є те, що вона не вимірює кутову швидкість ЛА, не використовує цю інформацію для оптимальної фільтрації слабих сигналів відбитих від ЛА з великої дальності, тобто для підвищення стійкості (астатизму) каналу АСН. В основу винаходу поставлена задача створити канал вимірювання кутових швидкостей літальних апаратів на підставі модернізованого частотно-часового методу вимірювання, завдяки використання високоточної вимірювальної інформації від якого, у складі шестипараметричної ЛВС [4], у низькочастотному фільтрі каналу АСН з'явиться можливість здійснювати високоточне і стійке кутове автосупроводження ЛА, що підвисить точність вимірювання інших параметрів руху ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту [3]. Поставлена задача вирішується за рахунок того, що у відому систему-прототип [2], з метою високоточного вимірювання кутови х швидкостей та підвищення стійкості кутового автосупроводження ЛА, у складі шестипараметричної ЛВС, додатково після СПМ послідовно введен блок дефлекторів, керування яким здійснюється введеними блоком керування дефлекторами та керуючим елементом, після фотодетектору послідовно введен широкосмуговий підсилювач, а замість СП, ПСП та ВП для отримання інформації о кутових , , швидкостях a і b послідовно введено резонансні підсилювачі, настроєні на відповідні частоти міжмодових , , ( Dn м , 2 Dn м , 3 Dn м , 6 Dn м ) Dn м оп биттів по каналах кутових швидкостей a і b , - введення опорних сигналів з ( Dn м оп , 2 Dn м оп , 3 Dn м оп, 6 Dn м оп ) частотами від передаючого лазера, формувачі імпульсів, „1"|„0" - тригери, схеми „і", реверсивні лічильники, схеми порівняння, електронно-цифрові обчислювальні машини та блоки відображення , , вимірювальної інформації по каналах a і b . Побудова каналу вимірювання кутових швидкостей пов'язана з використанням модернізованого ЧЧМ вимірювання, який дозволяє вимірювати всі шість параметрів руху ЛА. Пропонуємий канал вимірювання кутових швидкостей може бути доповнений каналами АСН з вимірюванням кутів азимута a і міста b , похилої дальності R та радіальної швидкості R'. Суть модернізованого ЧЧМ вимірювання, полягає в тому, що із синхронізованого спектра випромінювання одномодового багаточастотного лазера за допомогою селектора подовжніх мод виділяються необхідні пари частот для „підфарбування" ДС, для створення рівносигнального напрямку (РСН) у виді 4-х частково перетинаючихся парціальних ДС («підфарбованих» різницевими частотами міжмодових биттів), які на відміну прототипу тепер попарно зустрічно сканують у кожній із двох ортогональних площин [3], завдяки використання блока дефлекторів. Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин приводить до зрушення огинаючих періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування. Це зрушення дає похибки супроводження по кутам [3], а різниця в тривалості огинаючих - дає похибки кутових швидкостей. Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин дозволяє також вимірювати з високою точністю похилую дальність до ЛА по запізнюванню частот міжмодових биттів і його радіальну швидкість допплерівським методом, оскільки найкращий режим сканування забезпечується при напівперекритті ДС. Високоточні вимірювання кутових швидкостей ЛА можливі завдяки формуванню стабільних ДС. Інтерференційні провали згладжуються при обробці сигналів. Модернізований ЧЧМ вимірювання припускає обробку результатів вимірів у цифровій формі. Технічний результат, який може бути отриманий при здійсненні винаходу полягає в високоточному вимірюванні кутових швидкостей ЛА. Цю інформацію, у складі шестипараметричної ЛВС [4], можливо використовува ти для вузькосмугової фільтрації в каналі АСН та підвищення стійкості кутового автосупроводження ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту при понадвузьких ДС. Такий канал може бути доповнений каналами АСН з вимірюванням кутів a і b , похилої дальності R та радіальної швидкості R'. На фіг.1 приведена узагальнена структурна схема запропонованого каналу вимірювання кутових швидкостей літальних апаратів на підставі модернізованого частотно-часового методу вимірювання. На фіг.2 приведені епюри напруг з виходів блоків пропонуємого каналу вимірювання кутови х швидкостей. Запропонований канал вимірювання кутових швидкостей літальних апаратів на підставі модернізованого частотно-часового методу включає КЕ - керуючий елемент, БКД - блок керування дефлекторами, Лн - лазер з накачкою, СПМ - селектор подовжніх мод, БД - блок дефлекторів, ПРДО - передаючу оптику, ПРМО - приймаючу оптику, ФТД - фотодетектор, ШП - широкосмуговий підсилювач, РП - резонансні підсилювачі настроєні на відповідні частоти міжмодових биттів, ФІ - формувачі імпульсів, „1"|„0" – тригери 1½0, «І» - схеми «і», РЛч резонансні лічильники, СП - схеми порівняння, ЕЦОМ - електронно-цифрові обчислювальні машини та БВІ Dn м оп блоки відображення інформації, - введення опорних сигналів з частотами міжродових биттів ( Dn м оп , 2 Dn м оп , 3 Dn м оп, 6 Dn м оп ) від передаючого лазера. У запропонованому каналі вимірювання кутових швидкостей літальних апаратів на підставі модернізованого частотно-часового методу вимірювання всі блоки виконано по відомим схемам [2, 3]. Робота запропонованого каналу полягає в наступному. Зі синхронізованого одномодового багаточастотного спектра випромінювання YAG:Nd3+ - лазера (Лн) за допомогою СПМ виділяються необхідні пари частот для створення РСН завдяки формуванню сумарної ДС у виді 4-х частково перетинаючихся парціальних ДС ( Dn м , 2 Dn м , 3 Dn м , 6 Dn м ) («підфарбованих» різницевими частотами міжмодових биттів: , що попарно зустрічно сканують у кожній із двох ортогональних площин блоком дефлекторів. При цьому період сканування задається блоком керування дефлекторів, який разом з Лн забезпечується необхідним живленням від керуючого елемента. Проходячи через передаючу оптику, лазерний імпульсний сигнал фокусується в скануєми крапки простору, оскільки здійснюється зустрічне сканування двома парами ДС у кожній із двох ортогональних площин ( a і b чи Х і У). Прийняті прийомною оптикою відбиті від ЛА в процесі сканування чотирьох ДС лазерні імпульсні сигнали і огинаючи сигнали ДС за допомогою фотодетектора перетворюються в електричні імпульсні сигнали на різницевих частотах міжмодових биттів, посилювані широкосмуговим підсилювачем, і розподіляються по резонансних підсилювачах, побудованим на відповідні частоти: Dn м , 2Dn м , 3D nм , 6Dn м . При цьому імпульсні , сигнали радіочастоти, що надходять з РП 1 і РП 2 (РПD n м і РП 2Dn м ) - формують сигнал кутової швидкості a , а , РП 3 і РП 4 (РП3Dn м і РП6D nм ) - по кутової швидкості b . , Формування сигналу кутової швидкості a , полягає в наступному. Виділені імпульси ФІ 1 першої І лінії від Dn м оп опорної частоти , надходять на реверсивний лічильник (РЛч 1). У цей же час відбитий від ЛА оптичний Dn м отр сигнал частоти міжмодових биттів, який перетворюється ФТД у радіочастоту міжмодових биттів , змінюється по закону руху ДС лазера, перетворюється у другої лінії II ФІ 2 у крапках переходів півперіодів сканування в імпульси (один імпульс за півперіод сканування) та надходить на тригер "1", запускає його першим імпульсом. Надходячий першим імпульс від тригера відкриває РЛч для рахування імпульсів від ФІ 1 і схему "І" для перезапису на схему порівняння. Другий імпульс від тригера надходить на реверсивний вхід того ж РЛч, який здійснює зворотній рахунок надходячих через його імпульсів. Надходячий на тригер третій імпульс і т. ін. працюють аналогічно першому. Др угий імпульс не надходить на схему "І", а третій імпульс надходить, як і перший на ФІ 3, на схему "І", пропускає різностне число на схему порівняння і т. ін. Таким чином, в РЛч записується число імпульсів, порівнянне різності подовженого та покороченого (руху ДС) півперіоду сканування. Півперіод сканування подовжується тоді, коли швидкість руху ЛА співпадає з швидкістю руху ДС, а коли не співпадає покорочується. , Формування сигналу кутової швидкості b , відбувається аналогічним образом. Отримання інформації о , , кутови х швидкостей a і b відбувається в ЕЦОМ, а відображення на БВІ. Джерела інформації 1. Тюрін С.В., Шостко І.С., Романюк В.А., Пономарьов В.В., Павлович Р.В. Полігонні лазерні та оптикоелектронні вимірювальні засоби. Конспект лекцій. Частина II. - X.: ХВУ. -1998p. - 174с. 2. Рондин Ю.П., Коломийцев А.В. Система автоматического сопровождения объекта по направлению на многомодовых лазерах. //Информационные системы. Вып. - 1(5). - X.: НАНУ, П АНИ, ХВУ. - 1997.-С. 35-39. 3. Альошин Г.В., Рондін Ю.П., Коломійцев О.В. Принцип підвищення стійкості кутового автосупроводження літальних апаратів у лазерних вимірювальних системах. //Радіотехніка та оптоелектроніка. Зб. наук. праць. Вип. 7(37). - X.: ХВУ. - 2001. - С. 79 - 80. 4. Алешин Г.В., Коломийцев А.В., Боровик А.В. Проблемы создания высокоточной лазерной шестипараметрической системы нового поколения на основе модернизированного частотно-временного метода измерений. //Системи обробки інформації. Вип. - 4(20). - X.: Н АНУ, ПАНИ, ХВУ. - 2002. -С. 145-149.
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for measuring angular velocity of an aircraft by the improved frequency-time method
Автори англійськоюAlioshyn Hennadii Vasyliovych, Kolomiitsev Oleksii Volodymyrovych, Pashkov Dmytro Pavlovych
Назва патенту російськоюСистема для измерения угловой скорости летательного аппарата с помощью усовершенствованного частотно-временного метода
Автори російськоюАлешин Геннадий Васильевич, Коломийцев Алексей Владимирович, Пашков Дмитрий Павлович
МПК / Мітки
МПК: G01S 11/00, G01S 17/42
Мітки: основі, кутових, літальних, модернізованого, апаратів, методу, вимірювання, швидкостей, канал, частотно-часового
Код посилання
<a href="https://ua.patents.su/3-63285-kanal-vimiryuvannya-kutovikh-shvidkostejj-litalnikh-aparativ-na-osnovi-modernizovanogo-chastotno-chasovogo-metodu.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу</a>
Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу вимірювання
Номер патенту: 61680
Опубліковано: 17.11.2003
Автори: Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Пашков Дмитро Павлович
МПК: G01S 17/42
Мітки: канал, основі, радіальної, вимірювання, швидкості, апаратів, модернізованого, літальних, частотно-часового, методу
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, підсилювачі (фільтри) сигналів похибок (ПСП) та виконавчі пристрої (ВП) керування кутами азимута і місця, який відрізняється тим, що з метою...
Канал автоматичного супроводження літальних апаратів за напрямком на підставі модернізованого частотно-часового методу вимірювання
Номер патенту: 59115
Опубліковано: 15.08.2003
Автори: Пашков Дмитро Павлович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович
МПК: G01S 17/66, G01S 17/42
Мітки: літальних, напрямком, супроводження, канал, апаратів, вимірювання, модернізованого, методу, підставі, автоматичного, частотно-часового
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів (ЛА) за напрямком на підставі модернізованого частотно-часового методу, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимута і місця, який відрізняється тим, що ...
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового метода вимірювання
Номер патенту: 58392
Опубліковано: 15.07.2003
Автори: Пашков Дмитро Павлович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович
МПК: G01S 17/66, G01S 17/42
Мітки: високоточна, лазерна, модернізованого, метода, шестипараметрична, частотно-часового, система, вимірювання, основі
Формула / Реферат:
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового методу вимірювання, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд (СП), фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимуту і місця, яка відрізняється тим, що додатково після СПМ...
Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів
Номер патенту: 56943
Опубліковано: 15.05.2003
Автори: Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Пашков Дмитро Павлович
МПК: H03G 5/00
Мітки: частот, автосупроводження, кутового, точності, фільтр, літальних, апаратів, стійкості, підвищення, нижніх
Формула / Реферат:
Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів, що включає блоки віднімання, додавання, множення і інтегрування, який відрізняється тим, що на вході фільтра встановлений блок віднімання з вхідним зв'язком С введення значення прогнозованої динамічної похибки на підставі інформації з каналу кутової швидкості, а між виходом блока додавання та входом блока інтегрування послідовно включений...
Комбінована рушійна установка для літальних апаратів
Номер патенту: 49039
Опубліковано: 16.09.2002
Автор: Яшін Александр Євгеньєвич
МПК: F02K 9/28
Мітки: комбінована, установка, літальних, апаратів, рушійна
Формула / Реферат:
1. Комбінована двигунова установка для літальних апаратів, що складається із зовнішнього і внутрішнього корпусів з повітрозабірниками і соплами, між якими розташована камера згоряння з паливними форсунками, і повітряно-реактивного двигуна, розташованого у внутрішньому корпусі установки, в якому виконаний повітряний тракт, що має кільцевий вихід в камеру згоряння і забезпечений пристроєм формування повітряного потоку, крім того на внутрішньому...
Попередній патент: Спосіб побічного кількісного дослідження всмоктування глюкози у шлунково-кишковому тракті
Наступний патент: Хопер-вагон
Випадковий патент: Щитове перекриття для щитового рудникового кріплення