Пристрій для збудження скомпенсованого синхронного генератора
Номер патенту: 18439
Опубліковано: 15.11.2006
Автори: Новогрецький Сергій Миколайович, Подимако Валерій Іванович
Формула / Реферат
Пристрій для збудження скомпенсованого синхронного генератора, що містить датчик положення ротора, трансформатор струму та фільтри нижніх частот, який відрізняється тим, що додатково приєднано блок формування напруги керування в подовжній осі, з'єднаний входом з датчиком відхилення напруги якоря та датчиком реактивного струму якоря, а виходом - через підсилювач потужності з подовжньою обмоткою збудження, додатково приєднано блок формування напруги керування в поперечній осі, з'єднаний входом з датчиком активного струму якоря, датчиком кута вильоту ротора та датчиком похідної частоти обертання, а виходом - через підсилювач потужності з поперечною обмоткою збудження.
Текст
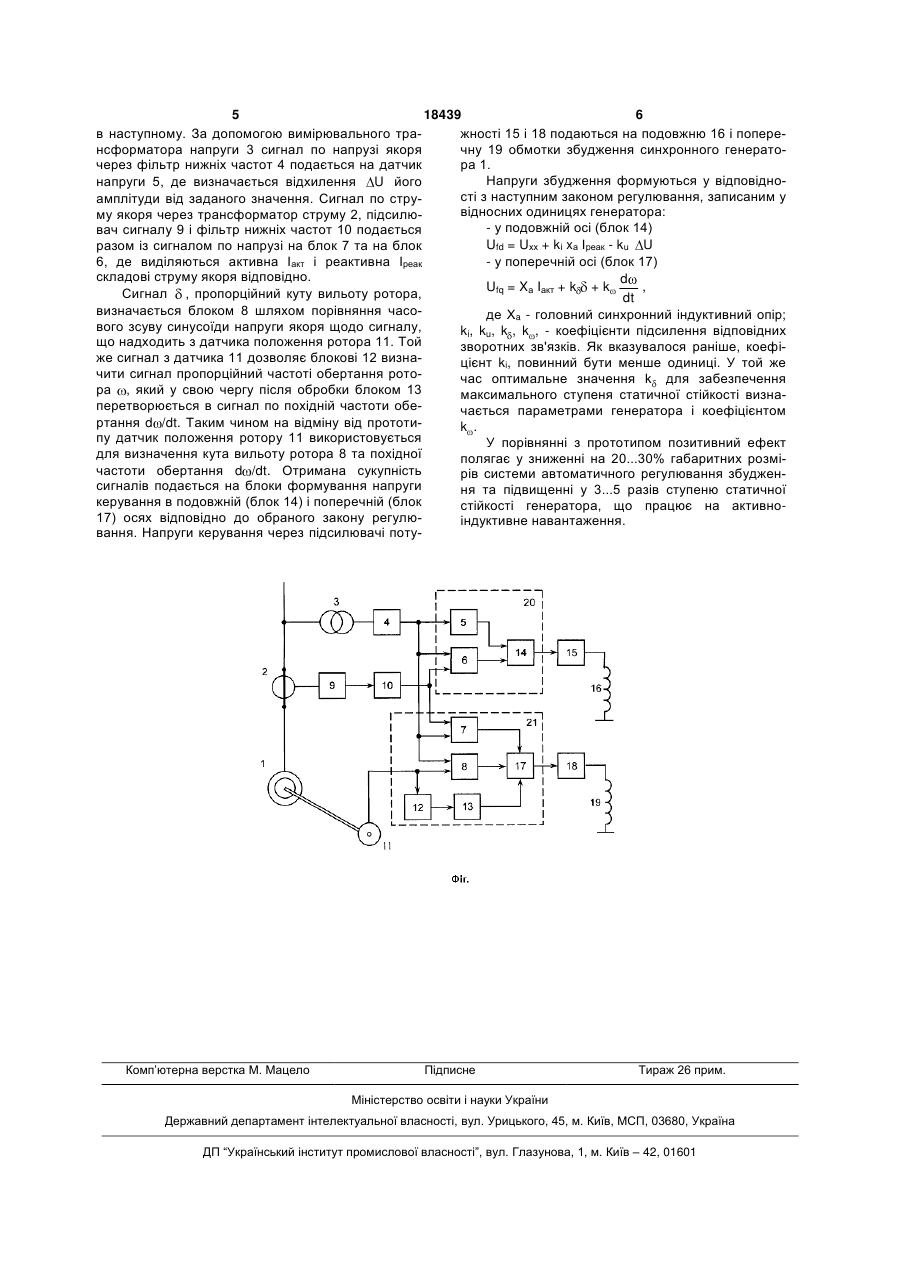
Пристрій для збудження скомпенсованого синхронного генератора, що містить датчик положення ротора, трансформатор струму та фільтри нижніх частот, який відрізняється тим, що додат 3 18439 4 кутовимірювальний генератор, ЕРС фаз якого потакож за рахунок відмови від використання обмотвинні бути обов'язково синфазні відповідним ЕРС ки збудження холостого ходу дозволяє знизити на машини. З іншого боку, з метою зменшення впливу 20...30% габаритні розміри системи збудження. подовжньої компенсаційної обмотки на обмотку Разом з тим зворотні зв'язки по напрузі, куту вихолостого ходу синхронна машина має трансфорльоту і похідній частоти обертання дозволяють у матор з повітряним зазором, обмотки якого вклюпорівнянні з прототипом підвищити у 3...5 разів чені послідовно з відповідними обмотками збуступінь статичної стійкості, під якою розуміється дження. Крім зазначених складностей здатність системи самостійно відновлювати вихідконструктивного виконання запропонованого регуний усталений режим роботи при малому коротколятора необхідно відзначити наявність у каналі часному збурюванні. регулювання зворотного зв'язку тільки по струму На фігурі представлено функціональну схему якоря, у той час як відсутність стабілізуючих звопристрою для збудження скомпенсованого синхротних зв'язків (наприклад, по напрузі) приводить ронного генератора. до погіршення електромеханічних перехідних проУ коло якірної обмотки трифазного синхронноцесів і стійкості системи в цілому. го генератора 1 включені трансформатор струму 2 В основу корисної моделі поставлено задачу та трансформатор напруги 3. Трансформатор наудосконалення пристрою для збудження скомпенпруги З через фільтр нижніх частот 4 має зв'язок з сованого синхронного генератора, у якого нова датчиком напруги 5, датчиками реактивного 6 та сукупність функціональних блоків забезпечує активного 7 струмів, а також з датчиком кута виспрощення конструктивної реалізації та високий льоту ротора 8. Трансформатор струму 2 підклюступінь стійкості роботи генератора в складі авточений через підсилювач сигналу 9 до фільтра ниномної енергосистеми. жніх частот 10, який з'єднаний з датчиком Поставлена задача вирішується тим, що у реактивного струму 6 та активного струму 7. На пристрої для збудження скомпенсованого синхвалу синхронного генератора 1 знаходиться датронного генератора, який містить датчик положенчик положення ротора 11, який має зв'язок з датня ротора, трансформатор струму та фільтри нижчиком кута вильоту ротора 8 та датчиком частоти ніх частот, згідно з корисною моделлю додатково обертання 12, що підключений до входу датчика приєднано блок формування напруги керування в похідної частоти обертання 13. Блоки 5 та 6 підкподовжній осі, з'єднаний входом з датчиком відхилючені до блоку формування напруги керування в лення напруги якоря та датчиком реактивного подовжній осі 14, який через підсилювач потужноструму якоря, а виходом - через підсилювач потусті 15 з'єднаний з подовжньою обмоткою збудженжності з подовжньою обмоткою збудження; також ня 16. Блоки 7, 8 та 13 підключені до блоку фордодатково приєднано блок формування напруги мування напруги керування в поперечній осі 17, керування в поперечній осі, з'єднаний входом з який через підсилювач потужності 18 з'єднаний з датчиком активного струму якоря, датчиком кута поперечною обмоткою збудження 19. Сукупність вильоту ротора та датчиком похідної частоти обеблоків 5, 6 та 14 поєднана у блок регулятора збуртання, а виходом - через підсилювач потужності з дження в подовжній осі 20. Сукупність блоків 7, 8, поперечною обмоткою збудження. 12, 13 та 17 поєднана у блок регулятора збудженВ усталеному скомпенсованому режимі кут ня в поперечній осі 21. вильоту ротора (кут між поперечною оссю індуктоЩоб не створювати додаткове зрушення по ра і зображуючим вектором напруги) дорівнює фазі між сигналами по напрузі і струму якоря, блоприблизно нулю за рахунок повної компенсації ки 4 і 10 повинні бути ідентичні (у випадку достатпоперечної складової реакції якоря поперечною ньо малих вищих гармонік у складі відповідних обмоткою збудження. У зв'язку з тим, що в цьому сигналів можливе повне виключення цих блоків із випадку подовжня і поперечна складові струму пристрою). У якості блоків 4 і 10 може бути викоякоря є одночасно його реактивною й активною ристаний фільтр нижніх частот з малою добротнісскладовими відповідно, то для забезпечення устатю. Як датчик положення ротора може бути виколеного режиму роботи регулювання в поперечній ристаний синхронний тахогенератор такий самий, осі впроваджено по активній складовій струму якощо і у прототипі. Блоки 20 та 21 можуть бути реаря, а в подовжній - по реактивній складовій. Сиглізовані на основі мікропроцесорної техніки, нанал по струму в поперечній осі повністю компенсує приклад, на базі мікроконтролерів фірми "Atmel" поперечну реакцію якоря, а в подовжній - забезпе[Евстифеев А. В. Микроконтроллеры AVR семейсчує часткову компенсацію подовжньої реакції якотва Classic фирмы Atmel.- М.: Издательский дом ря, визначаючи статизм зовнішньої характеристи«Додэка-XXI».- 2004.- с. 272 – 274]. Що стосується ки. При цьому струмова перекомпенсація живлення підсилювачів потужності, то воно може неприпустима (особливо в подовжній осі) для заздійснюватися як від незалежного джерела живбезпечення стійкої паралельної роботи декількох лення, так і безпосередньо від самого генератора. синхронних генераторів. Поліпшення динамічних При широтно-імпульсному керуванні блоки 15 і 18 властивостей генератора досягається введенням можуть бути побудовані на основі потужних біпоу подовжній осі негативного зворотного зв'язку по лярних з ізольованим затвором транзисторах, навідхиленню напруги, а в поперечній осі позитивноприклад, на базі IGBT-модулей фірми "Mitsubishi го зворотного зв'язку по куту вильоту ротора і сигElectric" [Воронин П.А. Силовые полупроводниконалу по похідній частоти обертання. Зазначений вые ключи: семейства, характеристики, применепристрій для збудження за рахунок заміни датчиків ние.- М.: Издательский дом «Додэка-XXI».-2001.подовжнього та поперечного струмів якоря на датc.356]. чики реактивного та активного струмів якоря, а Принцип дії пропонованого пристрою полягає 5 18439 6 в наступному. За допомогою вимірювального тражності 15 і 18 подаються на подовжню 16 і поперенсформатора напруги 3 сигнал по напрузі якоря чну 19 обмотки збудження синхронного генераточерез фільтр нижніх частот 4 подається на датчик ра 1. Напруги збудження формуються у відповіднонапруги 5, де визначається відхилення U його сті з наступним законом регулювання, записаним у амплітуди від заданого значення. Сигнал по струвідносних одиницях генератора: му якоря через трансформатор струму 2, підсилю- у подовжній осі (блок 14) вач сигналу 9 і фільтр нижніх частот 10 подається Ufd = Uхх + kі xа Іреак - ku U разом із сигналом по напрузі на блок 7 та на блок 6, де виділяються активна Iакт і реактивна Іреак - у поперечній осі (блок 17) складові струму якоря відповідно. d Ufq = Xа Iакт + k + k , Сигнал , пропорційний куту вильоту ротора, dt визначається блоком 8 шляхом порівняння часоде Хa - головний синхронний індуктивний опір; вого зсуву синусоїди напруги якоря щодо сигналу, ki, ku, k , k , - коефіцієнти підсилення відповідних що надходить з датчика положення ротора 11. Той зворотних зв'язків. Як вказувалося раніше, коефіже сигнал з датчика 11 дозволяє блокові 12 визнацієнт ki, повинний бути менше одиниці. У той же чити сигнал пропорційний частоті обертання роточас оптимальне значення k для забезпечення ра , який у свою чергу після обробки блоком 13 максимального ступеня статичної стійкості визнаперетворюється в сигнал по похідній частоти обечається параметрами генератора і коефіцієнтом ртання d /dt. Таким чином на відміну від прототиk . пу датчик положення ротору 11 використовується У порівнянні з прототипом позитивний ефект для визначення кута вильоту ротора 8 та похідної полягає у зниженні на 20...30% габаритних розмічастоти обертання d /dt. Отримана сукупність рів системи автоматичного регулювання збудженсигналів подається на блоки формування напруги ня та підвищенні у 3...5 разів ступеню статичної керування в подовжній (блок 14) і поперечній (блок стійкості генератора, що працює на активно17) осях відповідно до обраного закону регулюіндуктивне навантаження. вання. Напруги керування через підсилювачі поту Комп’ютерна верстка М. Мацело Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for exciting a compensated synchronous generator
Назва патенту російськоюУстройство для возбуждения компенсированного синхронного генератора
МПК / Мітки
МПК: H02P 9/10
Мітки: генератора, синхронного, скомпенсованого, пристрій, збудження
Код посилання
<a href="https://ua.patents.su/3-18439-pristrijj-dlya-zbudzhennya-skompensovanogo-sinkhronnogo-generatora.html" target="_blank" rel="follow" title="База патентів України">Пристрій для збудження скомпенсованого синхронного генератора</a>
Спосіб збудження електричного генератора з обмоткою збудження
Номер патенту: 35448
Опубліковано: 15.03.2001
Автори: Щур Микола Іванович, Ленчевський Евген Анатоліевич, Борсук Евген Павлович, Туваржіев Валентин Карпович, Богомол Володимир Іванович
МПК: H02K 23/02
Мітки: спосіб, генератора, обмоткою, електричного, збудження
Формула / Реферат:
Спосіб збудження електричного генератора з обмоткою збудження, який полягає в живленні кола збудження, що приєднано паралельно навантаженню, від обмотки якоря генератора, який відрізняється тим, що від обмотки якоря генератора електрична енергія низької напруги перетворюється вольтозбільшуючим пристроєм, що приєднано паралельно навантаженню, в електричну енергію з підвищеною напругою і подається для живлення його кола збудження.
Спосіб отримання постійної частоти синхронного генератора
Номер патенту: 10632
Опубліковано: 15.11.2005
Автори: Ревенко Ганна Генадієвна, Чашко Марк Васильович
Мітки: генератора, постійної, синхронного, спосіб, частоти, отримання
Формула / Реферат:
Спосіб отримання постійної частоти синхронного генератора при змінній швидкості обертання привідного двигуна, який включає зміну частоти обертання магнітного поля збудження, створюваного ротором генератора для усунення відхилення частоти напруги, що генерується, від номінальної, який відрізняється тим, що в роторі синхронного генератора створюють магнітне поле збудження, що обертається відносно ротора, вимірюють частоту обертання ротора...
Спосіб регулювання напруги синхронного генератора
Номер патенту: 38469
Опубліковано: 15.05.2001
Автори: Зонтов Роман Миколайович, Шоцький Олександр Миколайович, Алаєв Віктор Васильович
МПК: H03L 5/00
Мітки: генератора, регулювання, спосіб, напруги, синхронного
Текст:
...при значному зменшенні напруга СГ від номінального значення напруга живлення постійно підключена до обмотки збудження, струм збудження зростає, напруга СГ відновлюється. Навпаки, при значному збільшенні напруги СГ від номінального значення напруга живлення відключена від обмотки збудження, струм збудження зменшується, напруга СТ відновлюється. Реальними параметрами способу є: 1. Кількість тактів випрямлення напруги СГ і, отже, частота подачі...
Спосіб регулювання напруги синхронного генератора з високочастотним збудником
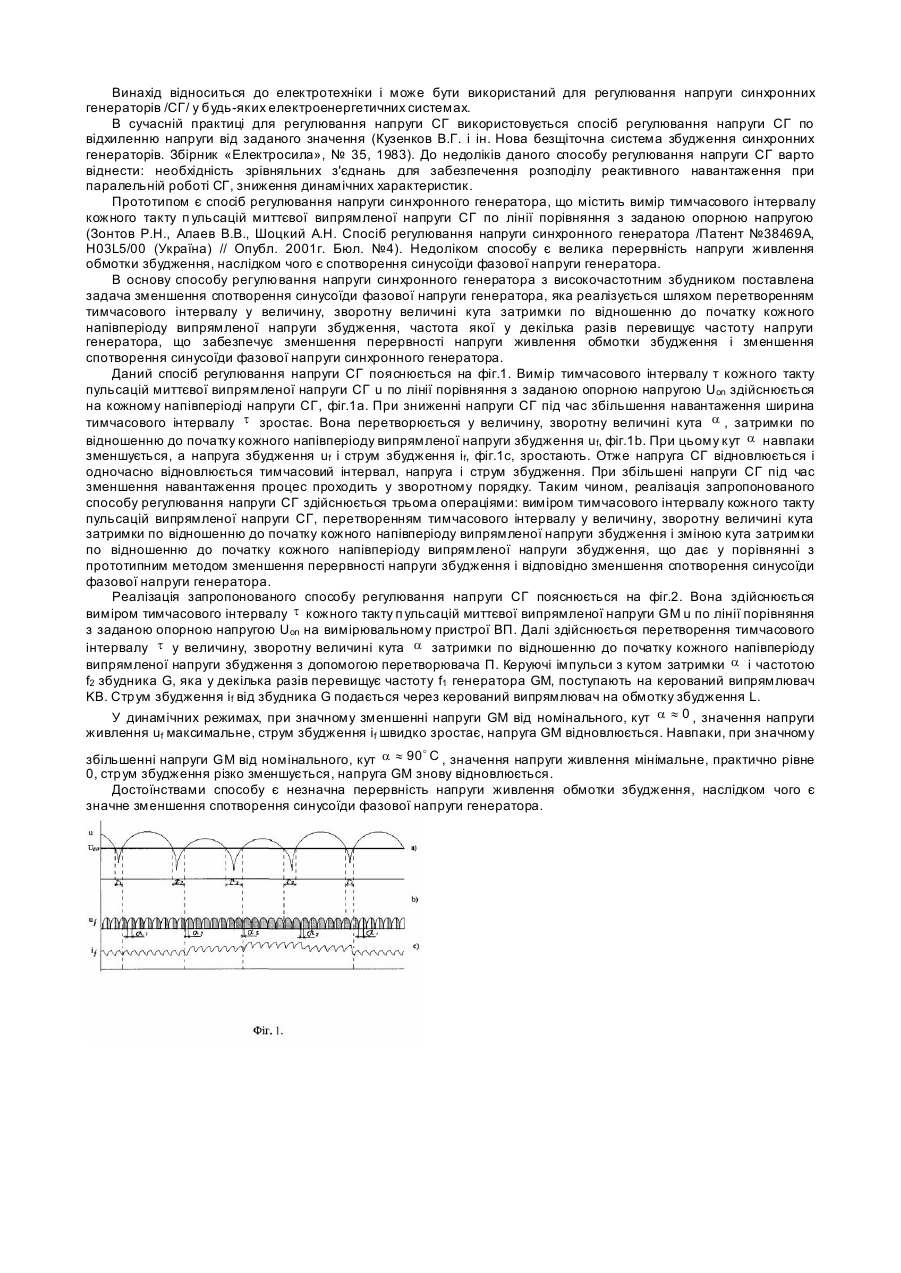
Номер патенту: 65910
Опубліковано: 15.04.2004
Автори: Березовенко Олександр Валентинович, Шайтор Микола Михайлович
МПК: H03L 5/00
Мітки: синхронного, напруги, генератора, високочастотним, збудником, регулювання, спосіб
Формула / Реферат:
Спосіб регулювання напруги синхронного генератора з високочастотним збудником, що включає вимір часового інтервалу кожного такту пульсацій миттєвої випрямленої напруги синхронного генератора по лінії порівняння з заданою опорною напругою, який відрізняється тим, що перетворюють часовий інтервал у величину, зворотну величині кута затримки по відношенню до початку кожного напівперіоду випрямленої напруги збудження, частота якої у декілька разів...
Спосіб форсування струму збудження синхронного двигуна та пристрій для його реалізації
Номер патенту: 60652
Опубліковано: 15.10.2003
Автори: Сторожко Вадим Станіславович, Нізімов Віктор Борисович, Нізімов Родіон Вікторович
Мітки: збудження, реалізації, синхронного, пристрій, форсування, спосіб, струму, двигуна
Формула / Реферат:
1. Спосіб форсування струму збудження синхронного двигуна, при якому регулюють струм обмотки збудження пропорційно обмірюваної електромагнітної потужності двигуна, контролюють струм і напругу статора і при перевищенні струмом наперед заданого значення або при короткочасному глибокому зниженні напруги в електромережі нижче допустимого рівня, знімають керуючі імпульси з мостового випрямляча, включають попередньо заряджений від незалежного...
Попередній патент: Гідрореактивний судновий двигун
Наступний патент: Спосіб зниження мікробної забрудненості повітря закритих приміщень
Випадковий патент: Суміш для рідкого утеплювача