Цифровий гідравлічний привод
Формула / Реферат
Цифровий гідравлічний привод, що містить гідроциліндр з робочими камерами, вихідний шток якого з’єднаний з розмикачем датчика зворотного зв’язку, цифровий гідродвигун внутрішньокрокового поділу, шток якого з’єднаний з корпусом датчика зворотного зв’язку, керуючі гідророзподільники, електричний дешифратор і програмний блок, який відрізняється тим, що датчик зворотного зв’язку виконаний у вигляді розміщених в корпусі з рівномірним кроком П-подібних пружних контактів з можливістю розмикання та замикання їх кінцем розмикача і трьох паралельних струмопровідних шин, дві із яких з’єднані з котушками електромагнітів трипозиційного чотирилінійного реверсивного гідророзподільника, а третя шина з’єднана з контактом котушки електромагніта двопозиційного трилінійного гальмуючого гідророзподільника, другі контакти котушок електромагнітів гідророзподільників з’єднані з вихідним каналом дешифратора, вихідні контакти якого з’єднані з П-подібними контактами, вхідний канал гальмуючого гідророзподільника з’єднаний з тиском живлення, а вихідні канали один через дросель, а другий безпосередньо з’єднаний з вихідним каналом реверсивного гідророзподільника, вихідні канали якого з’єднані з робочими камерами гідроциліндра.
Текст
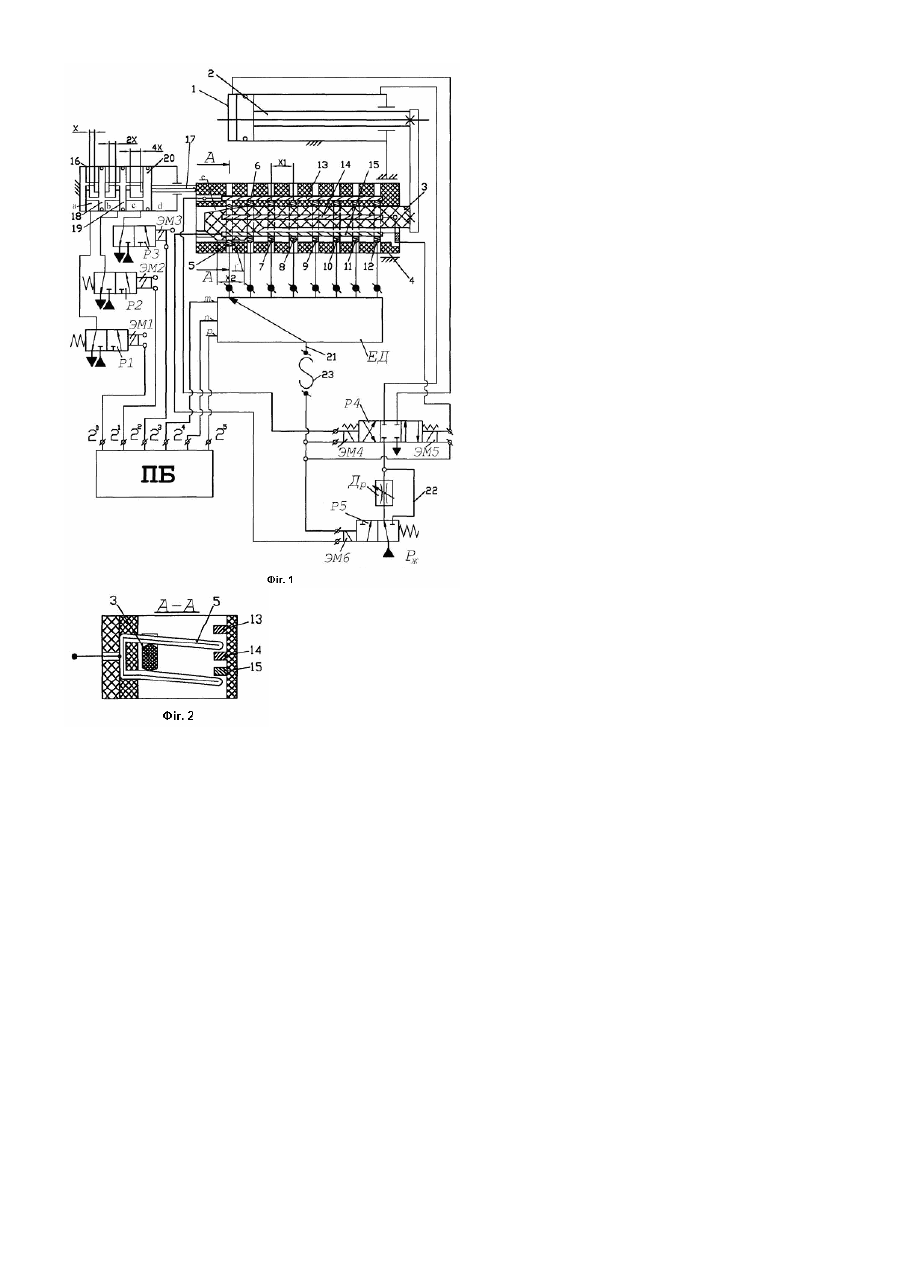
Корисна модель відноситься до систем автоматичного керування і регулювання і може бути використана в якості пристрою для дискретного позиціювання робочих органів металорізальних верстатів та промислових роботів. Відома конструкція гідравлічного цифрового приводу [1], що містить гідроциліндр, камери якого з’єднані з торцевими камерами дросилюючого розподільника з осьовими каналами, з’єднуючими одну із торцевих камер з міжпоясковими камерами через одну і гільзи з робочими вікнами, з’єднаними з виходами електрогідравлічного дешифратора. Недоліком такого приводу є складність конструкції гідравлічного дешифратора і дроселюючого розподільника, осьовий габаритний розмір якого перевищує хід гідроциліндра. Недоліком є також те, що максимальна величина переміщення вихідного штока циліндра від циклу до цикла не перевищує при трирозрядному дешифраторі семи дискрет, що значно понижає його швидкодію і систему керування при значних переміщеннях вихідного штока. Найбільш близьким аналогом. Обрано пневмогідравлічний позиційний пристрій з програмним керуванням [2], що містить програмний блок з’єднаний з першим входом логічного блоку і перетворювачем цифрового коду в переміщення і через регулятор тиску з одним із входів пневмогідроперетворювача, вихідний канал якого з’єднаний з другим входом логічного блоку і гідроприводом, сполученим з робочим органом, на якому закріплена заслінка, яка розміщена між вхідними і вихідними соплами датчика зворотного зв’язку, закріпленого на штоці перетворювача цифровою коду в переміщення, другий вхід пневмогідроперетворювача з’єднаний з вихідним каналом елемента «або», вхідні канали якого з’єднані з виходами елементів "і", прямі виходи яких з’єднані з відповідними виходами блока завдання програми і вихідними соплами датчика, а інвересні канали з’єднані з вихідними соплами датчика зворотного зв’язку. Недоліком найближчого аналога є те, що він складний, складність такого пристрою обумовлюється включенням в його структуру пневмогідроперетворювача, логічного блоку, логічних елементів «і», які викопані па базі пневматичних клапанів. Точність позиціювання вихідного штоку невисока, тому що вона залежить як від відношення рівнів опорного сигналу і сигналу від датчика зворотного зв’язку, так і від коефіцієнта жорсткості пружин дволінійних клапанів. В такому приводі внаслідок відсутності гальмуючого пристрою час затухання коливального процесу залежить від швидкості руху робочого органу, що обумовлює його невисоку швидкодію. В основу корисної моделі поставлено задачу спрощення конструкції і підвищення швидкодії приводу. Рішення поставленої задачі досягається тим, що в цифровому гідравлічному приводі, що містить гідроциліндр з робочими камерами, вихідний шток якого з’єднаний з розмикачем датчика зворотного зв’язку, цифровий гідродвигун внутрішньо-крокового поділу, шток якого з’єднаний з корпусом датчика зворотного зв’язку, керуючі гідророзподільники, електричний дешифратор і програмний блок. Новим є те, що датчик зворотного зв’язку викопаний у вигляді розміщених в корпусі з рівномірним кроком "П”-подібних пружних контактів з можливістю розмикання та замикання їх кінцем розмикача і трьох паралельних струмопровідних шин, дві із яких з’єднані з котушками електромагнітів трипозиційного чотирилінійного реверсивного гідророзподільника, а третя шина з’єднана з контактом котушки електромагніта двопозиційного трилінійного гальмуючого гідророзподільника, другі контакти котушок електромагнітів гідророзподільників з’єднані з вихідним каналом дешифратора, вихідні контакти якого з’єднані з "П”-подібними контактами, вхідний канал гальмуючого гідророзподільника з’єднаний з тиском живлення, а вихідні капали один через дросель, а другий безпосередньо з’єднаний з вихідним каналом реверсивного гідророзподільника, вихідні капали якого з’єднані з робочими камерами гідроциліндра. Суть корисної моделі пояснюється кресленням, де на Фіг.1 показана схема цифрового гідравлічного приводу. На Фіг.2 показаний поперечний перетин датчика по А-А. Цифровий гідравлічний привод містить гідроциліндр 1 (Фіг.1) з вихідним штоком 2, який жорстко з’єднаний з рухомим розмикачем 3 зі скосом «е» і прямолінійним участком «f». Розмикач 3 розміщений в корпусі датчика зворотного зв’язку 4. В корпусі датчика 4 також з кроком х1=8Х розміщені „П”-подібні контакти 5...12, де X дискрета цифрового гідродвигуна внутрікрокового поділу 16. Струмопровідні шипи 13, 14 і 15 підключені відповідно до котушок електромагнітів ЕМ4, ЕМ5 і ЕМ6 реверсивного гідророзподільників Р4 і гальмуючого розподільника Р5. Шток 17 цифрового гідродвигуна внутрікрокового ділення 16 жорстко скріплений з корпусом датчика зворотного зв’язку 4. В корпусі цифрового двигуна 16 послідовно розміщені поршні 18, 19 і 20 з утворенням розрядних камер а, b, с і камери повернення d. Камери цифрового двигуна 16 а, b і с з’єднані трубопроводами з вихідними каналами розрядних розподільників P1, Р2, і Р3. Камера d з’єднана з джерелом гідравлічного живлення. "П"-подібні контакти 5...12 з’єднані з вихідними контактами електричного дешифратора ЕД, вхідний контакт 21 якого підключений до клеми джерела струму 23. Друга клема джерела живлення 23 підключена до обмоток електромагнітів ЕМ4, ЕМ5, ЕМ6. Робоча рідина від гальмуючого розподільника Р5 підводиться через дросель Др або трубопровід 22 до реверсивною розподільника Р4, вихідні канали якого з’єднані з робочими камерами гідроциліндра 1. Керування здійснюється програмним блоком ПБ, вихідні канали якого з’єднані з котушками електромагнітів EM1, ЕM2, ЕМ3 розрядних розподільників P1, P2 і Р3 і керуючими каналами m, n і р електричного дешифратора ЕД. Принцип дії цифрового гідравлічного приводу полягає в наступному. У вихідному положенні (Фіг.1 і Фіг.2) електромагніти EM1, KM2, ЕМ3, ЕМ4 і ЕМ5 знеструмлені, тиск живлення рж постійно підведено до камери d двигуна 16 і до розподільників Р5 і Р4. Контакти 6...12 притиснені до шип 13 і 15, а контакт 5 (Фіг. 2) відтиснений від шин 13 і 15. Розрядні камери а, b і с цифрового двигуна 16 з’єднані зі зливом, а робочі камери циліндра 1 замкнені. При цьому вихідний шток 2 циліндра 1 знаходиться у вихідному положенні. Вихідне положення пристрою відповідає кодовій комбінації керуючих сигналів 000000. При опрацюванні кодової комбінації, наприклад, 000001, яка видасться програмним блоком ПБ, включається розподільник Р1 і тиск живлення від нього поступає в камеру а цифрового двигуна 16. Під дією цього тиску корпус датчика 4 переміщується вправо (по кресленню) на величину X. При цьому замикається верхній кінець контакту 5 з шиною 13 і ланцюг живлення електромагніта EМ4 розподільника Р4, який переключається вправо і тиск живлення від нього поступає в поршневу камеру, а штокова камера циліндра 1 з’єднується з атмосферою. Під дією перепадів тиску поршень зі штоком 2 і розмикачем 3 перемішується вправо на величину Х до розмикання верхнього кінця контакту 5 з шиною 13. При цьому знеструмлюється електромагніт ЕМ4, розподільник Р4 переключається в середнє положення і замикає поршневу і штокову камери циліндра 1, що забезпечує надійну фіксацію вихідного штока 2. В процесі переміщення штока 2 на величину X нижній кінець контакту 5 прямолінійним участком «f» розмикача 3 відтиснутий від шини 15, при цьому електромагніт ЕМ6 гальмуючого розподільника Р5 знеструмлений. Тиск живлення в поршневу камеру циліндра 1 поступає через дросель Др, яким регулюється гальмівна швидкість. При опрацюванні, наприклад, комбінації керуючих сигналів 001000, що відповідає тому, що сигнал керування від програмного блоку ПБ подається тільки на вхід т електричного дешифратора ЕД. Дешифратор ЕД переключається і з’єднує вхідний контакт 21 з "П"-подібним контактом 6. При цьому напруга підводиться до шин 13 і 15, від яких включаються електромагніти ЕМ4 і ЕМ6 розподільників Р4 і Р5. При такому включенні розподільників рідина від джерела живлення поступає у штокову камеру циліндра 1 від гальмуючого розподільника через трубопровід 22 минаючи дросель Др, що забезпечує швидкий рух поршня циліндра 1. В процесі переміщення вихідного штоку 2 з розмикачем 3 спочатку нижній кінець контакту 6 відтискується кулачком від шини 15, при цьому відключається гальмуючий розподільник Р5 і рідина в поршневу камеру циліндра 1 поступає через дросель Др, яким регулюється швидкість гальмування. При подальшому русі поршня розмикається верхній кінець контакту 6 з шиною 13, що приводить до знеструмлення розподільника Р4, який переключається в середнє положення і замикає робочі камери циліндра 1. При цьому величина переміщення вихідного штоку 2 дорівнює Х1. При опрацюванні кодової комбінації керуючих сигналів, наприклад 011111, що відповідає тому, що сигнали керування від програмного блоку ПБ подаються як на електричний дешифратор (канали m і n) так і на електромагніти EM1, EM2 і ЕМ3 розподільників P1, P2 і Р3. При цьому включаються розрядні розподільники P1, P2 і Р3 і тиск живлення поступає у камери a, b і с двигуна 16. Одночасно з цим переключається дешифратор ЕД, яким з’єднується канал 21 з "П"-подібним контактом 8 датчика 4. Від контакту 8 напруга через шини 13 і 15 підводиться до електромагнітів ЕМ4 і ЕМ6 розподільників Р4 і Р5,які включаються і рідина від них минаючи дросель Др поступає у поршневу камеру циліндра 1. Під дією перепаду тисків, що діє па поршень його шток 2 з розмикачем 3 переміщується вправо. Одночасно з цим під дією тисків в камерах а, b і с цифрового двигуна 16 корпус 4 також переміщається вправо на величину Х+2Х+4X=7X. В кінці переміщення штока 2 кулачком розмикача 3 відтискується нижній кінець контакту 8 від шини 15, при цьому відключається розподільник Р5 і гальмується швидкість руху штока 2. При подальшому русі штока 2 на гальмівній швидкості верхній кінець контакту 8 притискується за рахунок пружної сили до скоса "e" розмикача 3, при цьому контакт 8 роз’єднується з шиною 13 і знеструмлюється електромагніт ЕМ4, що приводить до включання розподільника Р4, і замиканню робочих камер циліндра 1 і зупинки його штока. Величина переміщення штока 2 при опрацюванні кодової комбінації керуючих сигналів дорівнює: X+2Х+3Х1=7Х+3.8Х=31Х. Якщо вхідний шток по інерції переміститься на більшу величину контакт 8 замкнеться з шиною 14 (Фіг.1 і Фіг.2), при цьому включається електромагніт ЕМ5 і тиск живлення підводиться до штокової камери циліндра 1, а поршнева камера з’єднується з атмосферою. Під дією тиску в штоковій камері вихідний шток 2 переміщується вліво до розмикання верхнього контакту 8 з шиною 14. При відключенні контакту 8 від шипи 14 знеструмлюється електромагніт ЕМ5, розподільник Р4 переключається в середнє положення і замикає робочі камери циліндра 1. При опрацюванні кодової комбінації керуючих сигналів 000000 відключаються від напруги електромагніти ЕМ1, ЕМ2, ЕМ3 розподільників P1, P2 і Р3, при цьому камери a, b і с двигуна 16 з’єднуються з атмосферою і шток 17 разом з корпусом датчика 4 переміщуються вліво у вихідне положення. Одночасно з цим електричний дешифратор ЕД теж переключається у вихідне положення і з’єднує вхідний контакт 21 з контактом 5 датчика 4. При цьому через шину 15 подасться напруга на електромагніт ЕМ6 розподільника Р5, а від шини 14 - на електромагніт ЕМ5 розподільника Р4. Розподільники Р5 і Р6 включаються і тиск живлення поступає в штокову камеру циліндра 1. Під дією тиску в штоковій камері шток 2 з розмикачем 3 переміщується вліво. В кіпці переміщення кулачком розмикача 3 розмикається нижній кінець контакту 5 з шиною 15, при цьому відключається розподільник Р5, внаслідок чого гальмується швидкість руху штока 2 циліндра 1. При подальшому русі на гальмівній швидкості верхній кінець контакту 5 відтискується скосом "е" кулачка розмикача 3 від шини 14. При цьому відключається електромагніт ЕМ5 і розподільник Р4 переключається в середнє положення камери циліндра 1 замикаються і вихідний шток 2 зупиняється у вихідному положенні. Аналогічно привод опрацьовує і інші кодові комбінації керуючих сигналів. Величина гальмівного шляху Х2 визначається довжиною прямолінійного участку "f" розмикача 3. Запропонований цифровий гідравлічний привод в порівнянні з відомими мас простішу конструкцію, невеликий осьовий розмір гідроциліндра і більш високу швидкодію. Більш висока швидкодія приводу обумовлена включенням у його структуру гальмуючого пристрою, який автоматично забезпечує гальмування, вихідного штока при опрацюванні любої комбінації керуючих сигналів. Джерела інформації: 1. Авторское свидетельство СССР №748042 Цифровой гидравлический привод. Кл. F15B11/12, 1978. 2. Авторское свидетельство СССР №602920 Пневмогидравлическое позиционное устройство для программного управления Кл. F15B19/44; F15B21/02, 1976.
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital hydraulic drive
Автори англійськоюNovik Mykola Andriiovych
Назва патенту російськоюЦифровой гидравлический привод
Автори російськоюНовик Николай Андреевич
МПК / Мітки
МПК: F15B 11/00
Мітки: гідравлічний, цифровий, привод
Код посилання
<a href="https://ua.patents.su/3-32252-cifrovijj-gidravlichnijj-privod.html" target="_blank" rel="follow" title="База патентів України">Цифровий гідравлічний привод</a>
Гідравлічний привод ротора
Номер патенту: 4861
Опубліковано: 28.12.1994
Автори: Зайденко Анатолій Михайлович, Шишов Валерій Володимирович
МПК: F15B 11/00
Мітки: гідравлічний, ротора, привод
Формула / Реферат:
1. Гидравлический привод ротора, содержащий поворотный блок цилиндров и распределитель, гидравлически связанный с блоком цилиндров и с управляющими золотниками поступательного перемещения, размещенными в корпусе с возможностью взаимодействия с копиром, а также осевые и радиальные каналы для соединения с источником рабочей жидкости и сливом, отличающийся тем, что, с целью повышения надежности и расширения диапазона применения, в нем каждый...
Гідравлічний верхній привод бурової установки
Номер патенту: 34632
Опубліковано: 15.03.2001
Автори: Густілін Віктор Генадійович, Лапицький Яків Юрійович, Филь Володимир Григорович, Ценципер Адольф Ісаакович
МПК: F03B 13/02, E21B 3/02
Мітки: бурової, привод, гідравлічний, верхній, установки
Формула / Реферат:
1. Гідравлічний верхній привід бурової установки, що містить корпус, порожній ведучий вал, з'єднаний із гідромотором, який відрізняється тим, що гідромотор виконаний радіально-поршневим багатократної дії з внутрішнім розташуванням напрямної котків поршневих груп, а на циліндрах гідромотора встановлені розподільники, з'єднані з кулачком, закріпленим на напрямній, з'єднаній із ведучим валом.2. Гідравлічний привід за п. 1, який...
Гідравлічний привод механізму повороту екскаватора
Номер патенту: 3209
Опубліковано: 26.12.1994
Автори: Сліденко Віктор Михайлович, Семененко Ігор Олександрович, Ханох Петро Мойсейович, Пивовар Павло Миколайович, Захаров Борис Миколайович
МПК: E02F 9/22
Мітки: привод, механізму, повороту, гідравлічний, екскаватора
Формула / Реферат:
Гидравлический привод механизма поворота экскаватора, включающий цилиндр двустороннего действия, в котором установлены шатун и поршень, образующие торцевую полость, шток-рейку, связанную с валом-шестерней, установленным в цилиндре, поршневые полости которого через обратные и переливные клапаны соединены с распределителем управления, отличающийся тем, что торцевая полость соединена с поршневыми полостями цилиндра двустороннего действия...
Багатопозиційний пневмогідравлічний привод
Номер патенту: 27812
Опубліковано: 12.11.2007
Автор: Новік Микола Андрійович
МПК: F15B 7/00
Мітки: привод, багатопозиційний, пневмогідравлічний
Формула / Реферат:
1. Багатопозиційний пневмогідравлічний привод, що містить циліндр з розміщеними в ньому поршнем і штоком з утворенням гідравлічної поршневої та пневматичної штокової камер з каналами живлення, гідравлічні розрядні дозатори з гідравлічними і пневматичними камерами, утвореними їх поршнями, який відрізняється тим, що привод додатково містить двопозиційні дволінійні розподільники, вхідні канали яких з'єднані з гідравлічними дозаторами, а вихідні...
Багатоканальний адаптивний гідравлічний привод
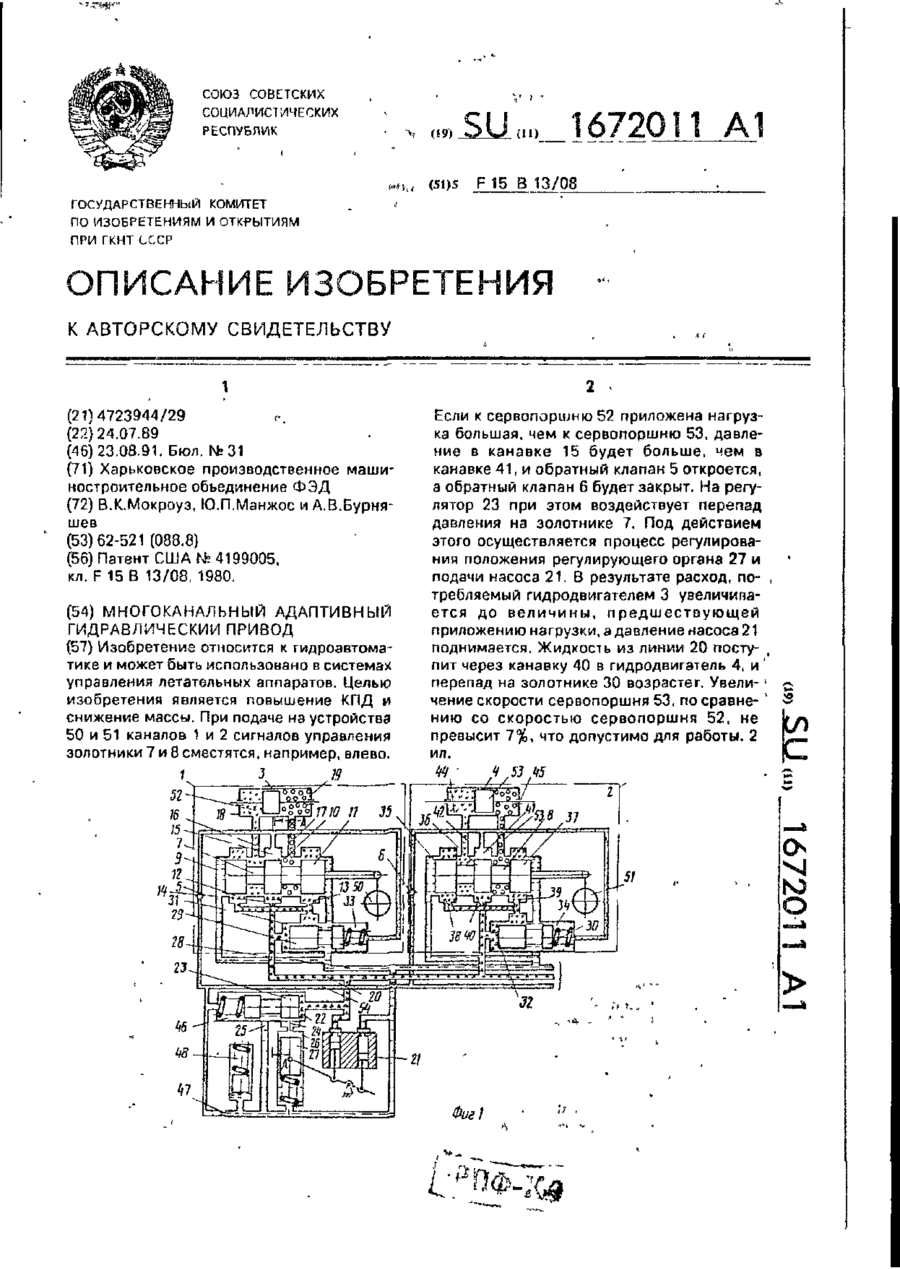
Номер патенту: 16580
Опубліковано: 29.08.1997
Автори: Бурняшев Аркадій Васильович, Мокроуз Василь Климентьйович, Манжос Юрій Петрович
МПК: F15B 13/08
Мітки: гідравлічний, багатоканальний, адаптивний, привод
Формула / Реферат:
Многоканальный адаптивный гидравлический привод, содержащий независимые исполнительные каналы, каждый из которых включает гидродвигатель, обратный клапан и распределительный золотник с поясками, сливными и нагнетательной канавками в корпусе и рабочими камерами, соединенными с полостями гидродвигателя и размещенными по обе стороны центрального пояска, взаимодействующего с нагнетательной канавкой, подключенной к линии нагнетания общего...
Попередній патент: Віброекструдер для формування фібробетонних виробів
Наступний патент: Пристрій для гідродинамічної дії на привибійну зону пласта
Випадковий патент: Пристрій для ін'єктування м'ясної сировини