Спосіб контролювання вивантаження сміття

Формула / Реферат
Спосіб контролювання вивантаження сміття, що включає використання установленої в ємності індивідуальної системи розпізнавання з датчиком перевертання ємності для сміття на кут a, огляд порожнини ємності на предмет наявності сміття, який відрізняється тим, що спосіб у постійному режимі забезпечує здатність отримувати на ємності інформацію про час та дату останнього вибирання сміття з ємності та за допомогою вбудованої на ємності системи з відповідними датчиками здійснити візуальний контроль часу та дати перевертання ємності з сміттям на кут a - можливість вивантаження з ємності сміття, візуально спостерігати на ємності для сміття показники реєстрації дати та часу останнього перевертання ємності, при цьому сигнал про вивантаження сміття з ємності надходить в систему розпізнавання при значеннях кута a в межах 180°£a³90°.
Текст
Спосіб контролювання вивантаження сміття, що включає використання установленої в ємності індивідуальної системи розпізнавання з датчиком перевертання ємності для сміття на кут a, огляд порожнини ємності на предмет наявності сміття, який відрізняється тим, що спосіб у постійному режимі забезпечує здатність отримувати на ємно 3 34178 Спосіб згідно з прототипом передбачає ідентифікацію контейнера з засипаним сміттям з можливістю його зважування на розвантажуваному чи засипному пристрої до і після процесу випорожнення для визначення ваги сміття, його дію з застосуванням опитуваного приймача, що розташований на автомобілі, системи ідентифікації. Наведений спосіб забезпечує ідентифікацію належності вказаного контейнера до автомобіля-сміттєзбірника та зважування сміття, що буде вивантаженим з контейнера. Тобто, згідно з відомими способами прибирання та способом згідно з прототипом дійсно покращується прибирання сміття, але в той же час відомими способами не забезпечується можливість контролювання часу і дати вилучення сміття з ємності, що є недоліком і прототипу. Проте це необхідно для забезпечення санітарних норм, щоб сміття не залежувалось, щоб визначити в який саме час подати транспорт для прибирання з конкретного контейнера сміття, бо на цей час він вже буде достатньо наповненим в залежності від конкретної дати та часу, щоб підприємство, яке вибирає сміття не вводило в оману, що сміття своєчасно вибирається та вивозиться. Основним завданням заявленої корисної моделі на спосіб контролювання вивантаження сміття є розширення функціональних можливостей додержання санітарно-технічних норм, забезпечення можливості систематизації даних щодо періодичності забирання та вивезення сміття з ємностей (сміттєзбірників та контейнерів), усунення спірних моментів щодо періодичності вивантаження та вивезення сміття сміттєзбиральними підприємствами та користувачами послуг. В основу створення корисної моделі покладена оптимізація технології вивезення побутового сміття з контейнерів та інших ємностей, шляхом перевантаження з ємності сміття в спеціальні автомобілі-сміттєзбірники в межах кута a, а в системі розпізнавання здійснення обробляння сигналу від датчика перевертання в сигнали індикації часу та дати здійснення перевертання ємності і вивантаження з неї сміття в спеціальні автомобілісміттєзбірники, і зберігається ця інформація до моменту наступного перевертання ємності і вивантаження сміття в спеціальні автомобілісміттєзбірники. Поставлене завдання досягається тим, що заявлений спосіб контролювання вивантаженім сміття, який включає в себе установлену в ємності індивідуальну систему розпізнавання з датчиком перевертання ємності для сміття на кут a, огляд порожнини ємності на предмет наявності сміття, в постійному режимі забезпечує здатність отримувати на ємності (сміттєзбірнику) інформацію про час та дату останнього вибирання сміття з ємності та за допомогою вбудованої на ємності системи з відповідними датчиками здійснити візуальний контроль часу та дати перевертання ємності з сміттям на кут a - можливість вивантаження з ємності сміття, візуально спостерігати на ємності для сміття показників реєстрації дати та часу перевертаній ємності, при цьому сигнал про вивантаження сміття з ємності поступає в систему розпізнавання при значеннях кута a в межах 180°£a³90°. 4 Заявлений спосіб передбачає технологічні процедури, котрі забезпечують контролювати вивантаження сміття з роботою установленої в конструкції ємності (сміттєзбірників та контейнерів) індивідуальної системи розпізнавання, по меншій мірі, з датчиком перевертання ємності для сміття на кут a, огляд порожнини ємності на предмет наявності сміття, і в постійному режимі забезпечується здатність отримувати на ємності інформацію про час та дату останнього вибирання сміття з ємності та за допомогою вбудованої на ємності системи з відповідними датчиками здійснити візуальний контроль часу та дати перевертання ємності з сміттям на кут a - можливість вивантаження з ємності сміття, візуально спостерігати (без безпосереднього огляду самої порожнини ємності) на ємності для сміття показників реєстрації дати та часу перевертання ємності до моменту наступного вивантаження (перевертання сміттєзбірника чи контейнера на кут a) з ємності сміття, при цьому сигнал про вивантаження сміття з ємності поступає в систему розпізнавання при значеннях кута a в межах 180°£a³90° незалежно від втручання людини, а контролювання вивантаження сміття можна здійснювати в будь-який момент. Відповідно до заявленого способу спільними з прототипом суттєвими ознаками є можливість контролювання вивантаження сміття за допомогою ємності індивідуальну систему розпізнавання з датчиком перевертання ємності для сміття на кут a, огляд порожнини ємності на предмет наявності сміття. Суттєвими відмінними ознаками відповідно заявленому способу контролювання вивантаження сміття є те, що контролювання способу контролювання вивантаження сміття здійснюється в постійному режимі, тобто забезпечується здатність отримувати в будь-який час людині на ємності інформацію про час та дату останнього вибирання сміття з ємності та за допомогою вбудованої на ємності системи з відповідними датчиками здійснити візуальний контроль часу та дати перевертання ємності з сміттям на кут a - можливе вірогідне вивантаження з ємності сміття, візуально спостерігати на ємності для сміття (а не всередині самої ємності) показників реєстрації дати та часу останнього перевертання ємності в період до здійснення наступного перевертання сміттєзбірника, при цьому заявлений спосіб контролювання вивантаження сміття передбачає, що сигнал про вивантаження сміття з ємності поступає в систему розпізнавання тільки при значеннях кута a в межах 180°£a³90° і незалежно від втручання людини. Суттєві відмінні ознаки технічного рішення, що заявляється, разом із спільними ознаками з прототипу, забезпечують досягнення технічного результату, а саме: порівняно з відомими способами вивантаження сміття досягнуто розширення функціональних можливостей додержання санітарно-технічних норм, тобто, забезпечена можливість систематизації даних щодо періодичності (фіксується час та дата) забирання та вивезення сміття з ємностей (сміттєзбірників та контейнерів), усунення спірних моментів щодо періодичності вивантаження та вивезення сміття сміттєзбираль 5 34178 ними підприємствами та користувачами послуг. В підсумку досягнуто виключення спірних питань щодо часу та дати вивантаження та вивезення сміття відповідними організаціями, що відповідають за таку те хнологічну процедуру. Вказане досягається шляхом вдосконалення та оптимізації відомих способів контролювання вивантаження сміття до кузовів сміттєзбиральних машин, можливість в будь-який час перевірити інформацію про час та дату останнього перевертання ємності контейнера, тобто, доведенням якості контролювання до незалежної від втр учання людини в процес вивантаження сміття з ємностей відповідними організаціями та спеціалізованим транспортом, спрощенням операцій контролювання, переважно тих, котрі можна здійснювати в будь-який час вподовж від одного вивантаження до наступного. В результаті заявлений спосіб забезпечує можливість контролювати роботу сміттєзбиральних машин, систематизувати періодичність робіт по збиранню та вивезенню сміття з сміттєвих ємностей (контейнерів, сміттєзбирачів тощо), що загалом дозволяє забезпечити визначитись і оптимізувати необхідну кількість контейнерів на даній дільниці, та упорядити періодичність роботи сміттєзбиральних машин, виключити “холості” виїзди сміттєзбиральних машин. У відповідності з заявленим способом контролювання вивантаження сміття сміттєзбиральна машина здійснює в будь-який момент під'їзд та вивантаження з контейнера сміття, а при цьому весь процес контролювання спустошення ємності контейнера здійснюється шляхом обробки сигналу від датчика перевертання в індивідуальній для кожного окремо взятого контейнера системі, яка Комп’ютерна в ерстка Н. Лисенко 6 виробляє і переробляє отримані сигнали в індикацію часу та дати тільки після здійснення перевертання ємності і вивантаження сміття в спеціальні автомобілі-сміттєзбірники. При цьому отримана інформація зберігається і може будь-якою особою в будь-який час бути перевіреною без огляду самої ємності (тобто ззовні на інформаційному табло) до моменту наступного перевертання ємності і вивантаження сміття в спеціальні автомобілісміттєзбірники. Заявлений спосіб забезпечує високий рівень санітарії, зменшену тр удоємність обслуговування, високий рівень вдосконалення контролювання вивантаження сміття в сміттєзбиральні машини, не зв'язує обов'язкову присутність людей, що відповідальні за контролювання процесів вивантаження та вивезення сміття, додержання санітарнотехнічних норм очищення територій від сміття. Заявлений спосіб може найти використання в комунальному господарстві, переважно в густозаселених містах, технологічний в процесі його застосування, надійний і гігієнічний, може бути використаним в умовах підви щених вимог до забезпечення сучасного дотримання рівня санітарно-технічного обслуговування територій. Використані витоки інформації: 1. Патент України №30844 В65F1/14, 2000 аналог; 2. Патент України №51680 В65F1/16, 2002 аналог; 3. Заявка DE №3332059, кл. В65F1/14, 1985 аналог; 4. Патент Російської Федерації №2040452 В65F1/14,1995 - прототип. Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of unloading of waste
Автори англійськоюOvod Ihor Mykhailovych
Назва патенту російськоюСпособ контролирования выгрузки мусора
Автори російськоюОвод Игорь Михайлович
МПК / Мітки
Мітки: сміття, вивантаження, контролювання, спосіб
Код посилання
<a href="https://ua.patents.su/3-34178-sposib-kontrolyuvannya-vivantazhennya-smittya.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролювання вивантаження сміття</a>
Контейнер для збору сміття з рекламоносіями та підсвіткою “лайт-бін”
Номер патенту: 2591
Опубліковано: 15.06.2004
Автори: Морква Руслан Борисович, Кашуба Ігор Ігорович
Мітки: сміття, лайт-бін, рекламоносіями, збору, підсвіткою, контейнер
Формула / Реферат:
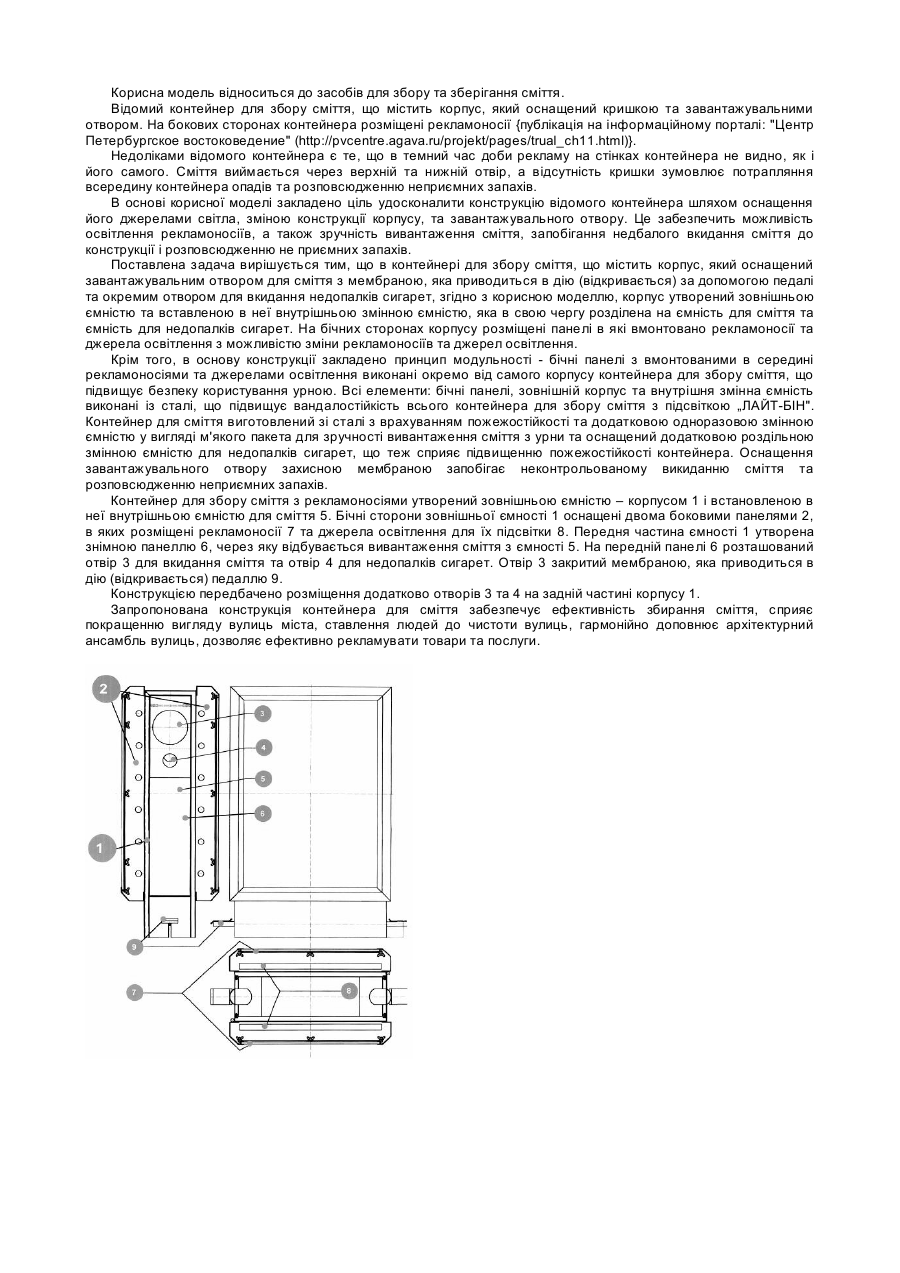
1. Контейнер для збору сміття з рекламоносіями, що містить корпус, оснащений завантажувальним отвором для сміття з мембраною з можливістю приведення в дію (відкривання) за допомогою педалі та окремим отвором для вкидання недопалків сигарет, який відрізняється тим, що корпус утворений зовнішньою ємністю і вставленою в ній внутрішньою змінною ємністю, яка, в свою чергу, розділена на ємність для сміття та ємність для недопалків сигарет, а на...
Контейнер для збору сміття з рекламоносіями “лайт-бін”
Номер патенту: 2574
Опубліковано: 15.06.2004
Автори: Єрмаков Кирило Юрійович, Кашуба Ігор Ігорович, Морква Руслан Борисович
МПК: B65F 1/00
Мітки: збору, рекламоносіями, сміття, лайт-бін, контейнер
Формула / Реферат:
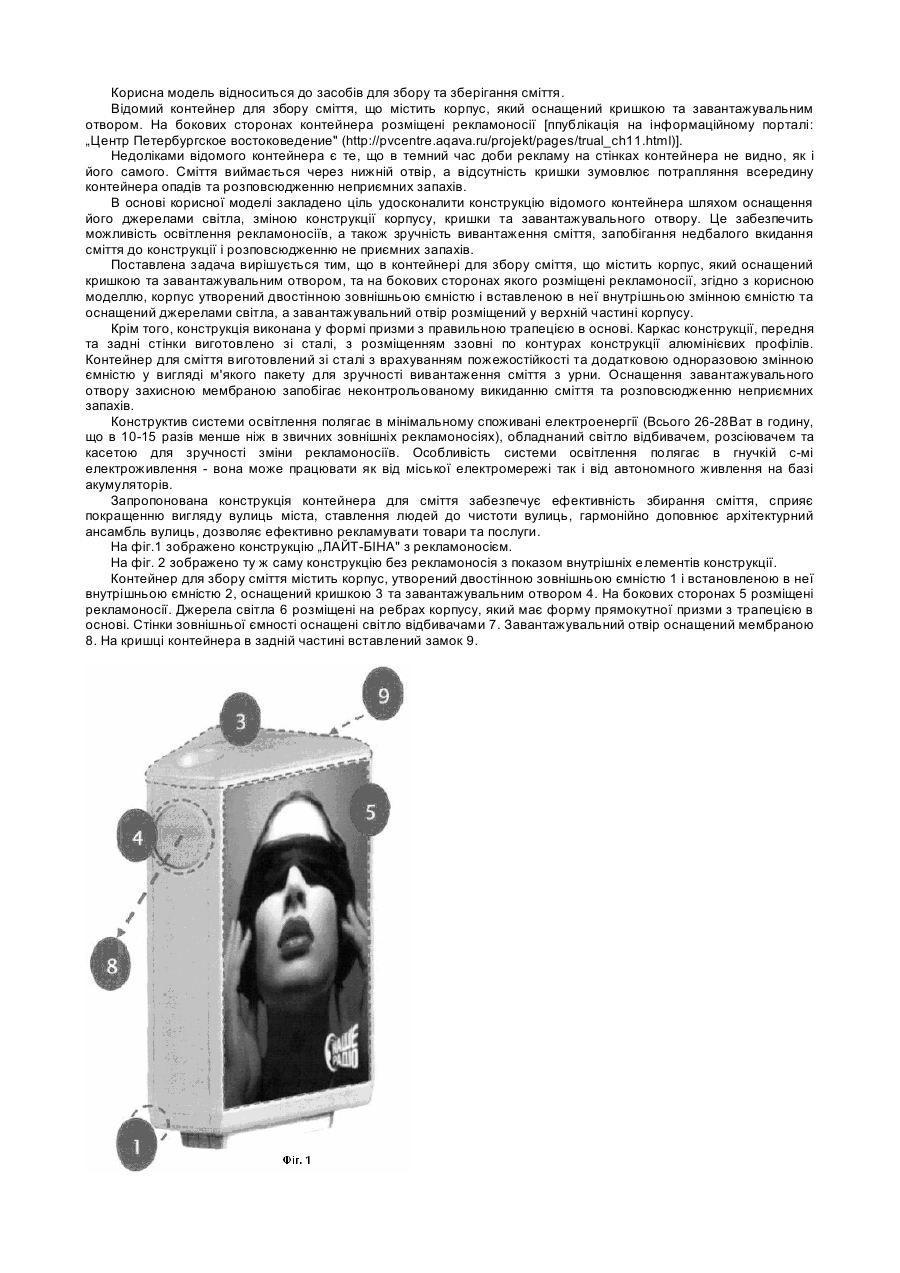
1. Контейнер для сміття, що містить корпус, який оснащений кришкою та завантажувальним отвором, та на бокових сторонах якого розміщені рекламоносії, який відрізняється тим, що корпус утворений двостінною зовнішньою ємністю і вставленою в неї внутрішньою знімною ємністю та оснащений джерелами світла, а завантажувальний отвір розміщений у верхній частині корпусу.2. Контейнер за п. 1, який відрізняється тим, що зовнішня ємність виконана у...
Урна для сміття
Номер патенту: 30768
Опубліковано: 11.03.2008
Автор: Найдорф Віктор Аркадійович
МПК: B65F 1/00
Формула / Реферат:
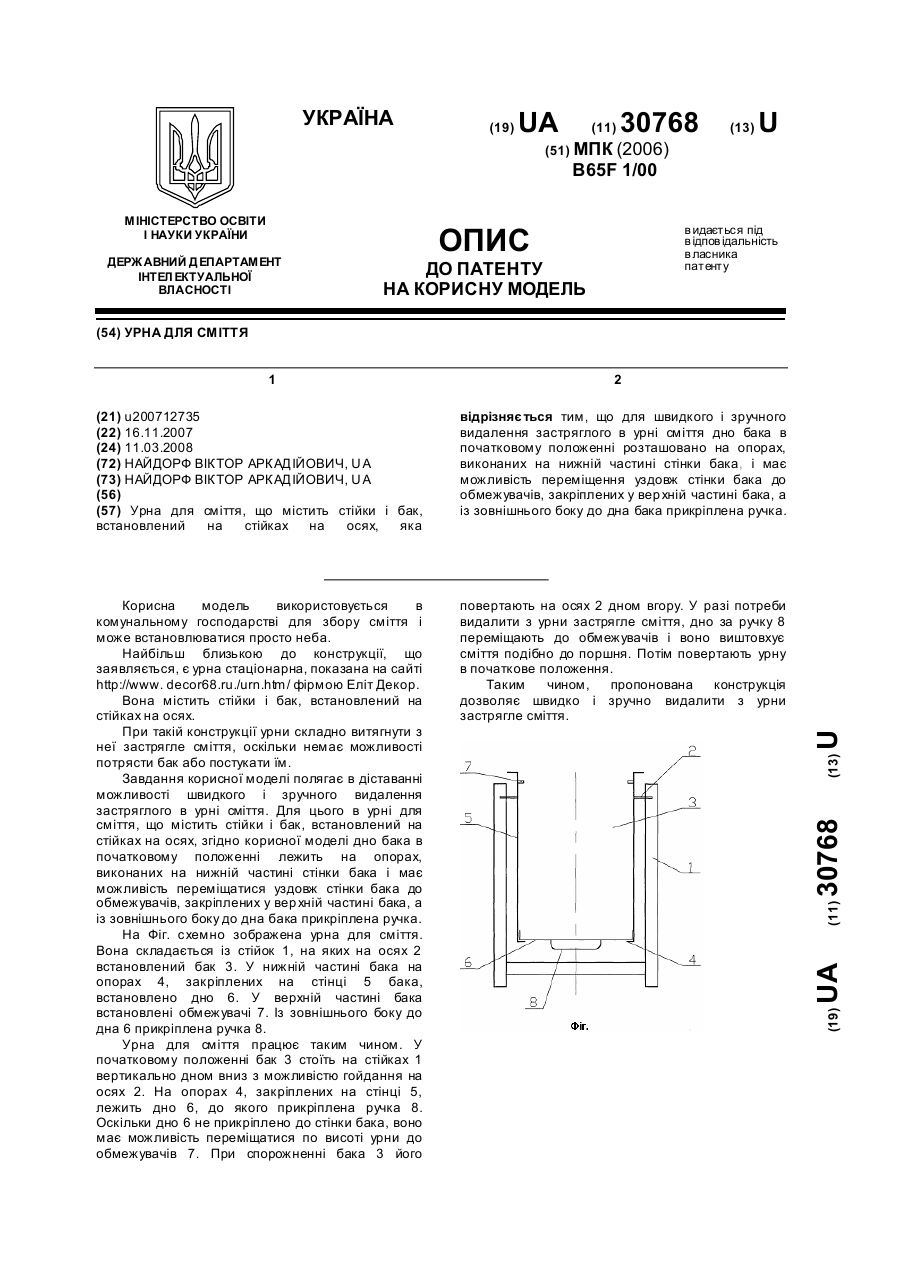
Урна для сміття, що містить стійки і бак, встановлений на стійках на осях, яка відрізняється тим, що для швидкого і зручного видалення застряглого в урні сміття дно бака в початковому положенні розташовано на опорах, виконаних на нижній частині стінки бака, і має можливість переміщення уздовж стінки бака до обмежувачів, закріплених у верхній частині бака, а із зовнішнього боку до дна бака прикріплена ручка.
Спосіб спалювання сміття
Номер патенту: 34013
Опубліковано: 15.02.2001
Автори: Родіонов Володимир Іванович, Носач Вільям Григорович, Скляренко Євген Валентинович
МПК: F23B 80/00, F23G 5/04
Мітки: спосіб, спалювання, сміття
Текст:
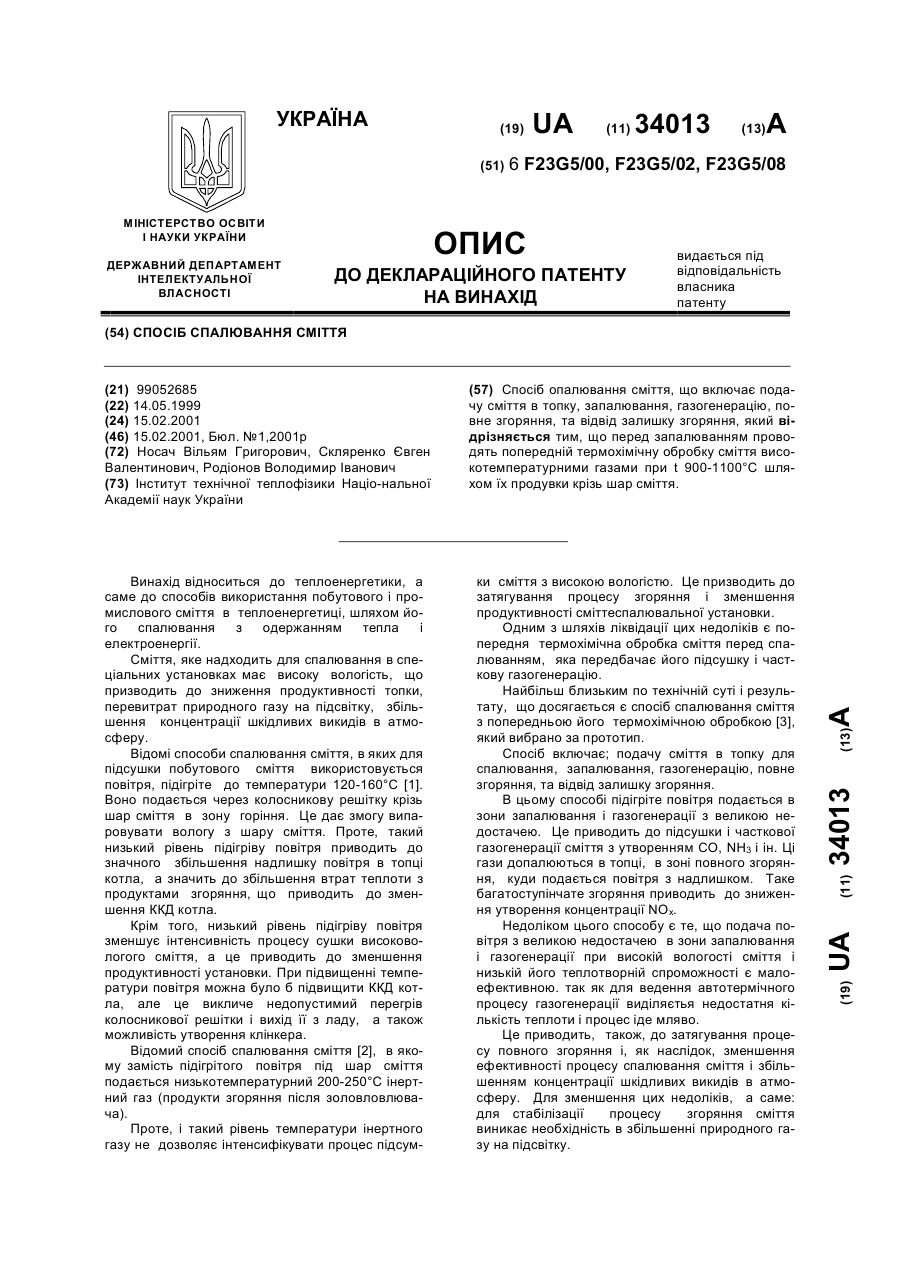
...ефективність спалювання сміття, зменшити витрати природного газу на підсвітку і зменшити концентрацію шкідливих викидів в атмосферу. На фіг. представлена принципова схема реалізації способу спалювання сміття, що заявляється, де 1 - конвейєр подачі сміття, 2 – конвейєр термохімічної обробки сміття, 3 конвейєр запалювання, 4 конвейєр газогенерації, 5 - конвейєр повного згоряння, 6 конвейєр відводу залишка згоряння. Реалізація способу...
Пневмогідравлічний прес, спосіб контролювання тиску стисненого газу та спосіб контролювання обсягу робочої рідини в ньому
Номер патенту: 83037
Опубліковано: 10.06.2008
Автори: Кириченко Євген Олексійович, Чеберячко Іван Михайлович, Євтєєв Володимир Васильович, Шворак Віталій Григорович
МПК: B30B 15/16, B30B 1/00
Мітки: стисненого, прес, тиску, ньому, газу, контролювання, пневмогідравлічний, рідини, спосіб, робочої, обсягу
Формула / Реферат:
1. Пневмогідравлічний прес, що містить змонтовані в станині робочий циліндр з встановленим в ньому поршнем зі штоком, насос зі всмоктувальним та нагнітальним трубопроводами, додатковий циліндр з відповідним поршнем зі штоком, сполучену з поршневими та штоковими порожнинами робочого та додаткового циліндрів гідромагістраль, акумулятор, гідророзподілювачі, керовані заслінки, зворотні клапани, зливний резервуар та датчик визначення тиску -...
Попередній патент: Спосіб експлуатації підземного сховища газу
Наступний патент: Спосіб одержання риборослинної кормової суміші
Випадковий патент: Композиція альтернативного рідкого рослинного палива для дизельних, турбореактивних та газотурбінних двигунів