Спосіб визначення інерційних характеристик об’єкта
Формула / Реферат
1. Способ определения инерционных характеристик объекта, включающий приложение к объекту вращающих моментов и измерение параметров его углового движения, отличающийся тем, что вращающие моменты прикладывают по меньшей мере дважды, в различные моменты времени и при ненулевых проекциях абсолютной угловой скорости на связанные координатные оси, фиксируя каждый раз проекции вращающих моментов на указанные оси, измеряя проекции на эти оси абсолютной угловой скорости и углового ускорения объекта, а также - текущего кинетического момента маховичных двигателей, после чего по совокупности зафиксированных и измеренных параметров вычисляют осевые и центробежные моменты инерции объекта.
2. Способ по п. 1, отличающийся тем, что вращающие моменты к объекту прикладывают при помощи реактивных двигателей, поддерживая кинетический момент маховичных двигателей нулевым.
3. Способ по п. 1, отличающийся тем, что вращающие моменты прикладывают при помощи маховичных двигателей, при нулевом вращающем моменте от реактивных двигателей.
4. Способ по пп. 1 и 3, отличающийся тем, что маховичным двигателям сообщают фиксированный кинематический момент, а измерение параметров углового движения объекта производят при отключенных маховичных двигателях.
5. Способ по пп. 1 и 3, отличающийся тем, что проекции кинетического момента маховичных двигателей на связанные координатные оси поддерживают постоянными в процессе измерений параметров углового движения объекта.
Текст
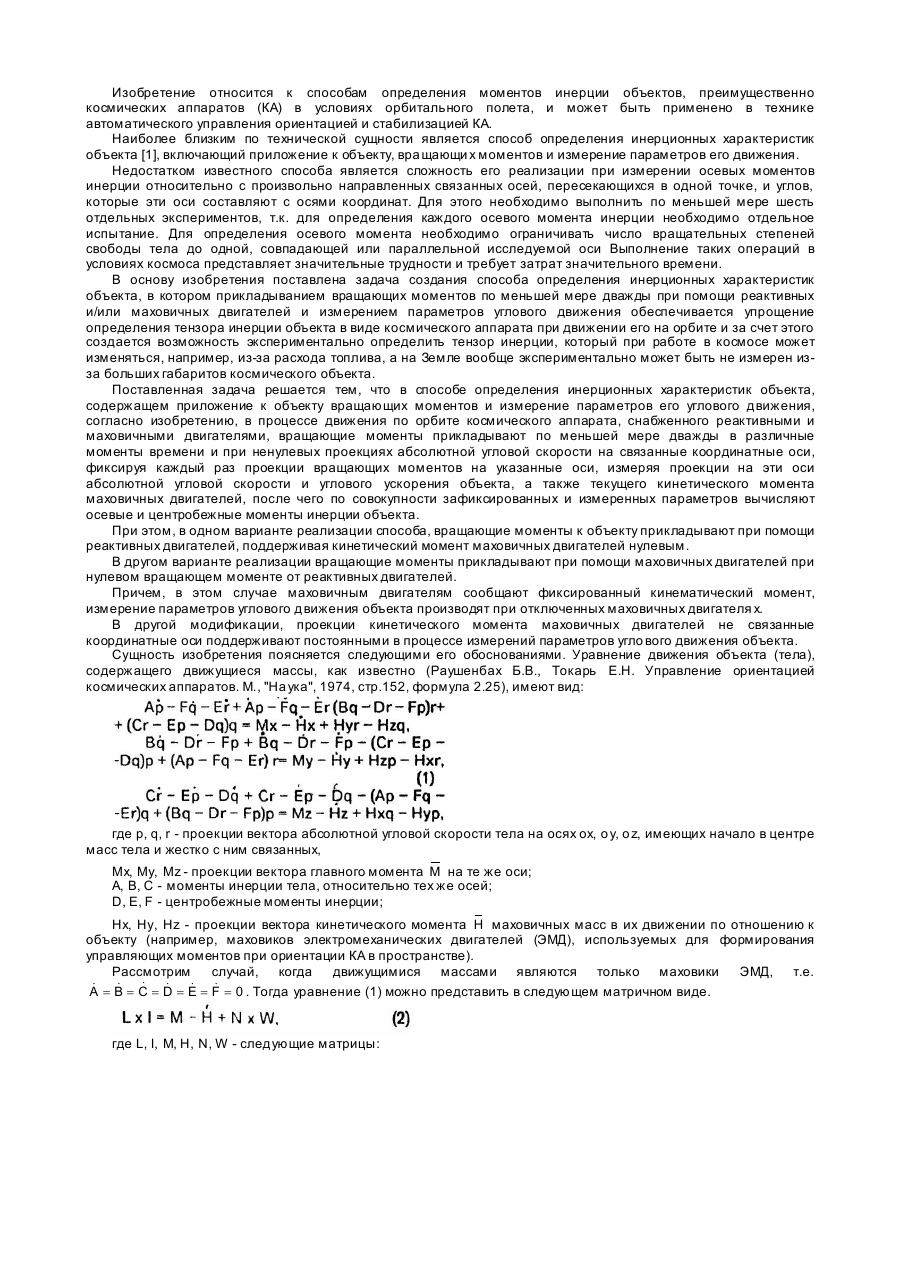
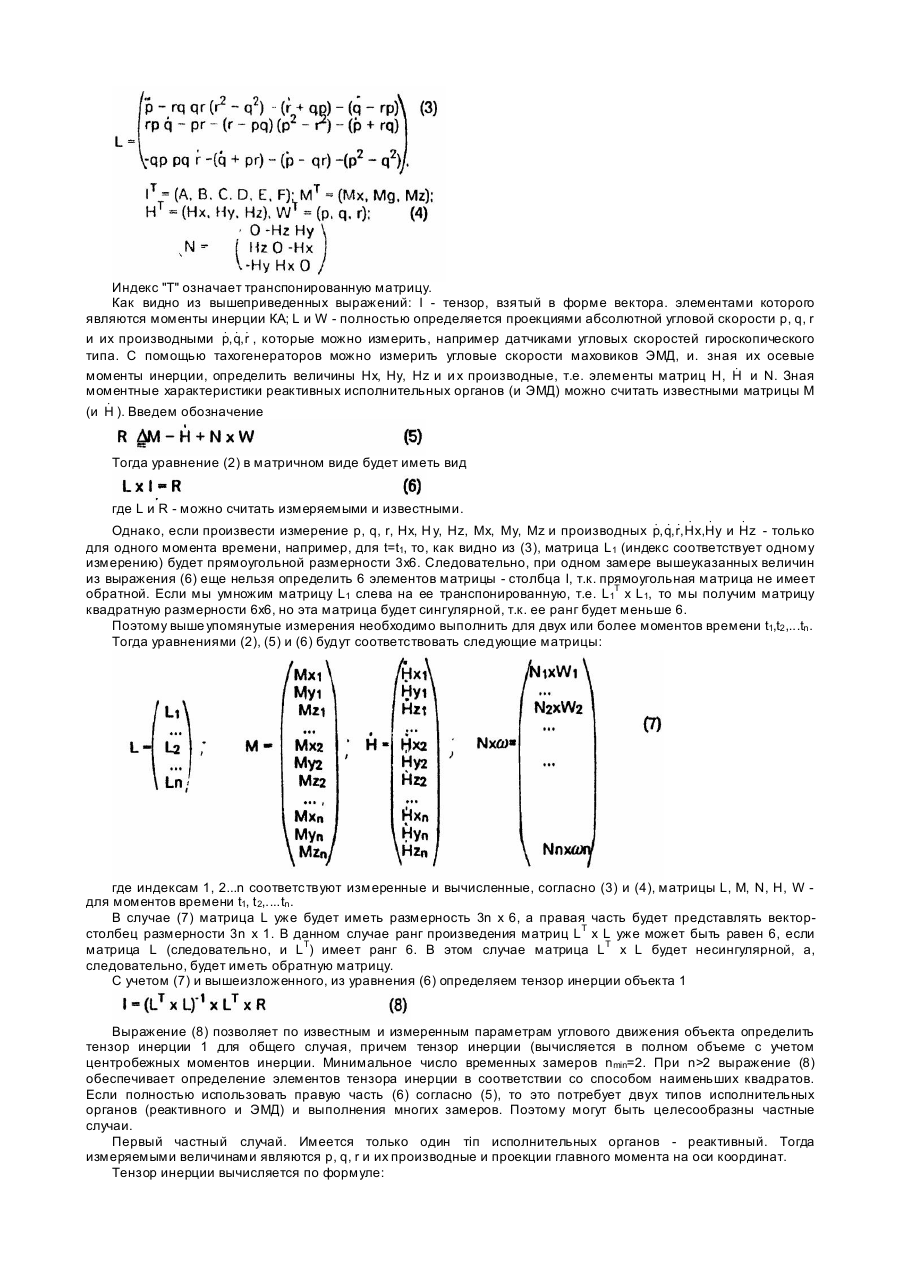
Изобретение относится к способам определения моментов инерции объектов, преимущественно космических аппаратов (КА) в условиях орбитального полета, и может быть применено в технике автоматического управления ориентацией и стабилизацией КА. Наиболее близким по технической сущности является способ определения инерционных характеристик объекта [1], включающий приложение к объекту, вра щающи х моментов и измерение параметров его движения. Недостатком известного способа является сложность его реализации при измерении осевых моментов инерции относительно с произвольно направленных связанных осей, пересекающихся в одной точке, и углов, которые эти оси составляют с осями координат. Для этого необходимо выполнить по меньшей мере шесть отдельных экспериментов, т.к. для определения каждого осевого момента инерции необходимо отдельное испытание. Для определения осевого момента необходимо ограничивать число вращательных степеней свободы тела до одной, совпадающей или параллельной исследуемой оси Выполнение таких операций в условиях космоса представляет значительные трудности и требует затрат значительного времени. В основу изобретения поставлена задача создания способа определения инерционных характеристик объекта, в котором прикладыванием вращающих моментов по меньшей мере дважды при помощи реактивных и/или маховичных двигателей и измерением параметров углового движения обеспечивается упрощение определения тензора инерции объекта в виде космического аппарата при движении его на орбите и за счет этого создается возможность экспериментально определить тензор инерции, который при работе в космосе может изменяться, например, из-за расхода топлива, а на Земле вообще экспериментально может быть не измерен изза больших габаритов космического объекта. Поставленная задача решается тем, что в способе определения инерционных характеристик объекта, содержащем приложение к объекту вращающих моментов и измерение параметров его углового движения, согласно изобретению, в процессе движения по орбите космического аппарата, снабженного реактивными и маховичными двигателями, вращающие моменты прикладывают по меньшей мере дважды в различные моменты времени и при ненулевых проекциях абсолютной угловой скорости на связанные координатные оси, фиксируя каждый раз проекции вращающих моментов на указанные оси, измеряя проекции на эти оси абсолютной угловой скорости и углового ускорения объекта, а также текущего кинетического момента маховичных двигателей, после чего по совокупности зафиксированных и измеренных параметров вычисляют осевые и центробежные моменты инерции объекта. При этом, в одном варианте реализации способа, вращающие моменты к объекту прикладывают при помощи реактивных двигателей, поддерживая кинетический момент маховичных двигателей нулевым. В другом варианте реализации вращающие моменты прикладывают при помощи маховичных двигателей при нулевом вращающем моменте от реактивных двигателей. Причем, в этом случае маховичным двигателям сообщают фиксированный кинематический момент, измерение параметров углового движения объекта производят при отключенных маховичных двигателя х. В другой модификации, проекции кинетического момента маховичных двигателей не связанные координатные оси поддерживают постоянными в процессе измерений параметров угло вого движения объекта. Сущность изобретения поясняется следующими его обоснованиями. Уравнение движения объекта (тела), содержащего движущиеся массы, как известно (Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. М., "Ha ука", 1974, стр.152, формула 2.25), имеют вид: где p, q, r - проекции вектора абсолютной угловой скорости тела на осях ox, o y, o z, имеющих начало в центре масс тела и жестко с ним связанных, Мх, My, Mz - проекции вектора главного момента M на те же оси; А, В, С - моменты инерции тела, относительно тех же осей; D, Е, F - центробежные моменты инерции; Hx, Нy, Hz - проекции вектора кинетического момента H маховичных масс в их движении по отношению к объекту (например, маховиков электромеханических двигателей (ЭМД), используемых для формирования управляющих моментов при ориентации КА в пространстве). Рассмотрим случай, когда движущимися массами являются только маховики ЭМД, т.e. &= & & &= & & A B C D E F 0 . Тогда уравнение (1) можно представить в следующем матричном виде. = = = = где L, I, М, Н, N, W - следующие матрицы: Индекс "Т" означает транспонированную матрицу. Как видно из вышеприведенных выражений: I - тензор, взятый в форме вектора. элементами которого являются моменты инерции КА; L и W - полностью определяется проекциями абсолютной угловой скорости p, q, r & & & и их производными p, q, r , которые можно измерить, например датчиками угловых скоростей гироскопического типа. С помощью тахогенераторов можно измерить угловые скорости маховиков ЭМД, и. зная их осевые & моменты инерции, определить величины Нх, Ну, Hz и и х производные, т.е. элементы матриц Н, H и N. Зная моментные характеристики реактивных исполнительных органов (и ЭМД) можно считать известными матрицы М & (и H ). Введем обозначение Тогда уравнение (2) в матричном виде будет иметь вид где L и R - можно считать измеряемыми и известными. & & & & & & Однако, если произвести измерение р, q, r, Нх, Н у, Hz, Mx, My, Mz и производных p, q, r, Hx,Hy и Hz - только для одного момента времени, например, для t=t1, то, как видно из (3), матрица L1 (индекс соответствует одному измерению) будет прямоугольной размерности 3х6. Следовательно, при одном замере вышеуказанных величин из выражения (6) еще нельзя определить 6 элементов матрицы - столбца I, т.к. прямоугольная матрица не имеет обратной. Если мы умножим матрицу L1 слева на ее транспонированную, т.е. L1T x L1, то мы получим матрицу квадратную размерности 6х6, но эта матрица будет сингулярной, т.к. ее ранг будет меньше 6. Поэтому выше упомянутые измерения необходимо выполнить для двух или более моментов времени t1,t2 ,...tn . Тогда уравнениями (2), (5) и (6) будут соответствовать следующие матрицы: где индексам 1, 2...n соответствуют измеренные и вычисленные, согласно (3) и (4), матрицы L, М, N, Н, W для моментов времени t1, t 2,....tn . В случае (7) матрица L уже будет иметь размерность 3n х 6, а правая часть будет представлять векторстолбец размерности 3n х 1. В данном случае ранг произведения матриц LT x L уже может быть равен 6, если матрица L (следовательно, и LT) имеет ранг 6. В этом случае матрица LT x L будет несингулярной, а, следовательно, будет иметь обратную матрицу. С учетом (7) и вышеизложенного, из уравнения (6) определяем тензор инерции объекта 1 Выражение (8) позволяет по известным и измеренным параметрам углового движения объекта определить тензор инерции 1 для общего случая, причем тензор инерции (вычисляется в полном объеме с учетом центробежных моментов инерции. Минимальное число временных замеров nmin=2. При n>2 выражение (8) обеспечивает определение элементов тензора инерции в соответствии со способом наименьших квадратов. Если полностью использовать правую часть (6) согласно (5), то это потребует двух типов исполнительных органов (реактивного и ЭМД) и выполнения многих замеров. Поэтому могут быть целесообразны частные случаи. Первый частный случай. Имеется только один тіп исполнительных органов - реактивный. Тогда измеряемыми величинами являются р, q, r и их производные и проекции главного момента на оси координат. Тензор инерции вычисляется по формуле: Сам способ состоит в том, что к объекту прикладывают момент М, так, чтобы происходило одновременное изменение р, q и r. Измеряют р, q и r и их производные для конкретных временных моментов, определяют матрицу LI согласно (3) для каждого 1-го момента времени, затем определяют ее ранг. Если ранг равен 3, то такие матрицы LI используют для составления матрицы L, согласно (7); одновременно для каждой LI, входящей в L, запоминают клетку (MxI, MyI, MzI) для матрицы-столбца М согласно (7). Затем вычисляют I, согласно (9). Неудобством этого частного случая являются трудности в точном фиксировании проекций момента Мх, My и Mz, т.к. моменты реактивного исполнительного органа зависят от многих причин и могут изменяться с течением времени. Второй частный случай. Имеется только один тип исполнительных органов - электромаховичные двигатели. При их включении и отключении появляется изменение собственного кинетического момента Н - или из-за электромагнитных моментов ЭМД или из-за моментов сопротивления вращению. Если измерять угловые скорости вращения каждого j-го ЭМД Wj , то можно определять составляющие кинетического момента, & направленные по осям вращения маховиков ЭМД следующим образом: Hj = Ij W j и Hj = IjW j , где Ij - момент инерции маховика j-того ЭМД. В частности, могут использоваться три ЭМД, установленные потрем взаимно перпендикулярным осям, параллельным осям координат. В этом случае (ЭМД)х, (Э МД)у, (ЭМД)z - будут & & & соответствова ть Нх, Н у, Hz и Hx, Hy и Hz . Необходимо отметить, что, как известно, величины Wj легко доступны измерению (при необходимости весьма точному) и в силу больших различий по величине между моментами инерции КА и моментами инерции маховиков, имеют значительно больший масштаб, чем проекции абсолютной угловой скорости самого КА. Для рассматриваемого частного случая, как и в предыдущем, при использовании матрицы-столбца М, измеряют р, q, r и их производные, измеряют Wj и определяют необходимые матрицы, согласно (4), для конкретных временных моментов, при этом управляют'изменением кинетического момента ЭМД таким образом, чтобы происходило одновременное изменение р, q и r, определяют матрицу (3), ее ранг, и если ранг равен 3, то набор таких матриц используют для составления матриц (7), после чего определяют I как: Третий частный случай. Оставляют в правой части (2) только одно слагаемое NxW. Для этого с помощью ЭМД создают кинетические моменты (HxI, HyI, H zI), где I=1,2,...,n, выключают ЭМД. измеряют pI, qI, rI и их производные, определяют LI-матрицу, ее ранг и если ранг равен 3, то набор таких матриц используют для составления матрицы (7), а затем определяют с учетом (4), тензор инерции Четвертый частный случай. Отличается от третьего частного случая тем, что составляющие полного кинетического момента поддерживают постоянными во все периоды измерений. Во всех выше рассмотренных случаях, как было ранее показано, должно выполняться условие n>>2, где n максимальное число операций по определению параметров углового движения КА.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of inertial characteristics of object
Автори англійськоюAnuprienko Hennadii Yefremovych
Назва патенту російськоюСпособ определения инерционных характеристик объекта
Автори російськоюАнуприенко Геннадий Ефремович
МПК / Мітки
Мітки: інерційних, об'єкта, характеристик, визначення, спосіб
Код посилання
<a href="https://ua.patents.su/3-3847-sposib-viznachennya-inercijjnikh-kharakteristik-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення інерційних характеристик об’єкта</a>
Спосiб сарчука в.м. фiксування електромагнiтних хвильових характеристик об’єктiв, що тестуються
Номер патенту: 601
Опубліковано: 15.12.1993
Автор: Сарчук Віктор Миколайович
МПК: A61H 39/00
Мітки: спосіб, в.м, сарчука, електромагнітних, фіксування, об'єктів, тестуються, хвильових, характеристик
Формула / Реферат:
1 .Способ фиксации электромагнитных волновых характеристик тестируемых объектов путем взаимодействия тестируемого объекта и носителя информации, отличающийся тем, что, с целью повышения точности записи волновых характеристик при этиологической диагностике заболеваний, вещество — носитель информации расплавляют, заливают в металлическую емкость и устанавливают ее вместе с тестируемым объектом на металлическую пластину.2. Способ по...
Акустоелектронний спосіб визначення переміщень об’єкта
Номер патенту: 3040
Опубліковано: 26.12.1994
Автори: Скрипник Вікторія Іосифівна, Жовнір Микола Федорович, Скрипник Юрій Олексійович, Довгополий Анатолій Степанович
МПК: G01B 17/00
Мітки: об'єкта, переміщень, спосіб, визначення, акустоелектронний
Формула / Реферат:
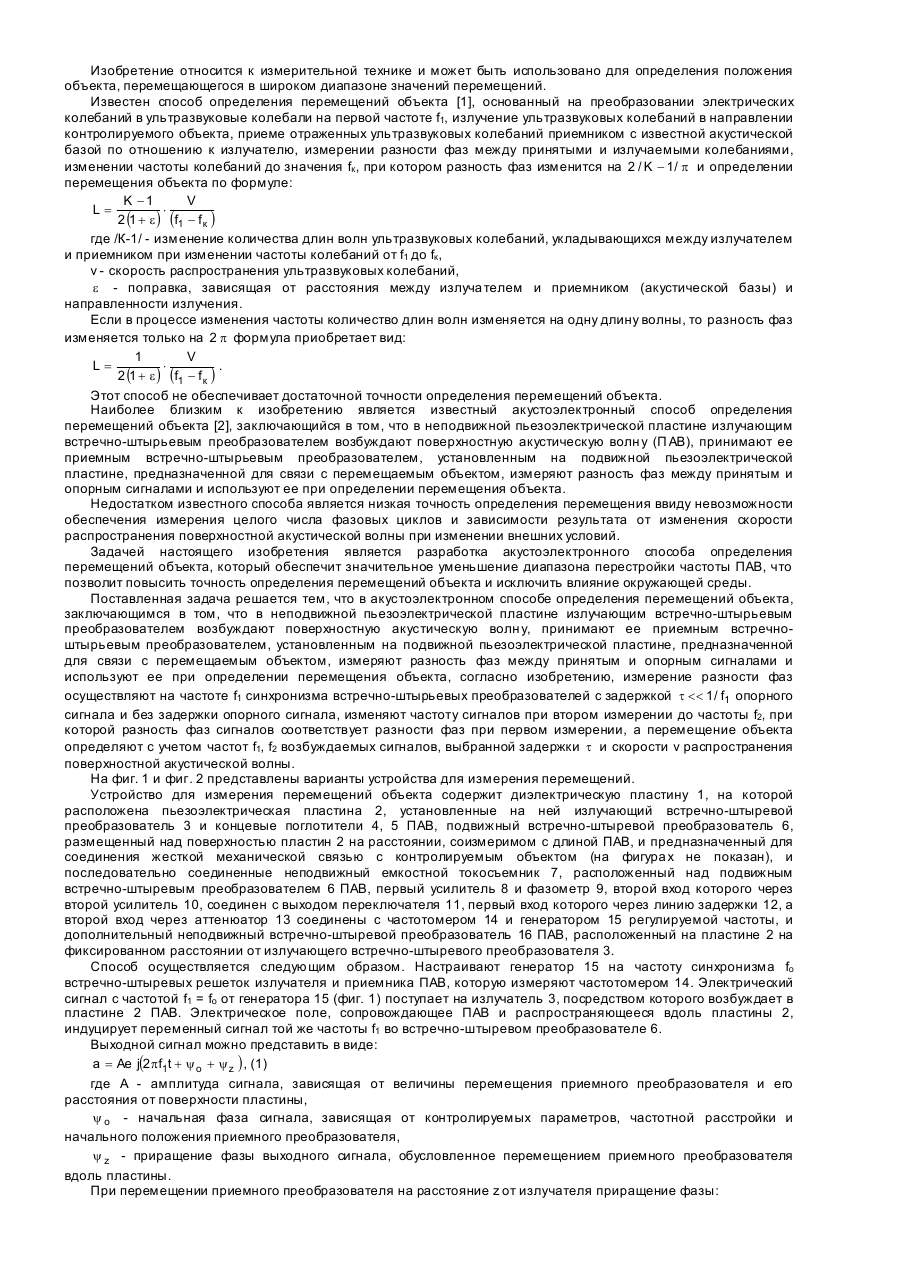
Акустоэлектронный способ определения перемещений объекта, заключающийся в том, что в неподвижной пьезоэлектрической пластине излучающим встречно-штыревым преобразователем возбуждают поверхностную акустическую волну, принимают ее приемным встречно-штыревым преобразователем, установленным на подвижной пьезоэлектрической пластине, предназначенной для связи с перемещаемым объектом, измеряют разность фаз между принятым и опорным сигналами и...
Спосіб визначення больової чутливості зубів
Номер патенту: 105
Опубліковано: 30.04.1993
Автор: Гришанін Геннадій Григорович
МПК: A61B 5/01
Мітки: визначення, зубів, больової, спосіб, чутливості
Формула / Реферат:
(57) Способ определения болевой чувствительности зубов после рефлекторной аналгезии путем нанесения электрического раздражения, отличающийся тем, что, с целью снятия болевых воздействий при электрическом раздражении, измеряют температуру кожи лица в местах проекции инфраорбитального и ментального отверстий до рефлекторной анальгезии и после нее через каждые 10 мин и при повышении температуры на 1,5-2,5°С определяют повышение порога болевой...
Спосіб визначення нижнього порогового значення коефіцієнта інтенсивності напружень
Номер патенту: 2913
Опубліковано: 26.12.1994
Автори: Андрейків Олександр Євгенович, Сергієнко Олег Миколайович, Скальський Валентин Романович, Лисак Микола Васильович
МПК: G01N 17/00, B23P 25/00
Мітки: визначення, напружень, спосіб, значення, нижнього, інтенсивності, порогового, коефіцієнта
Формула / Реферат:
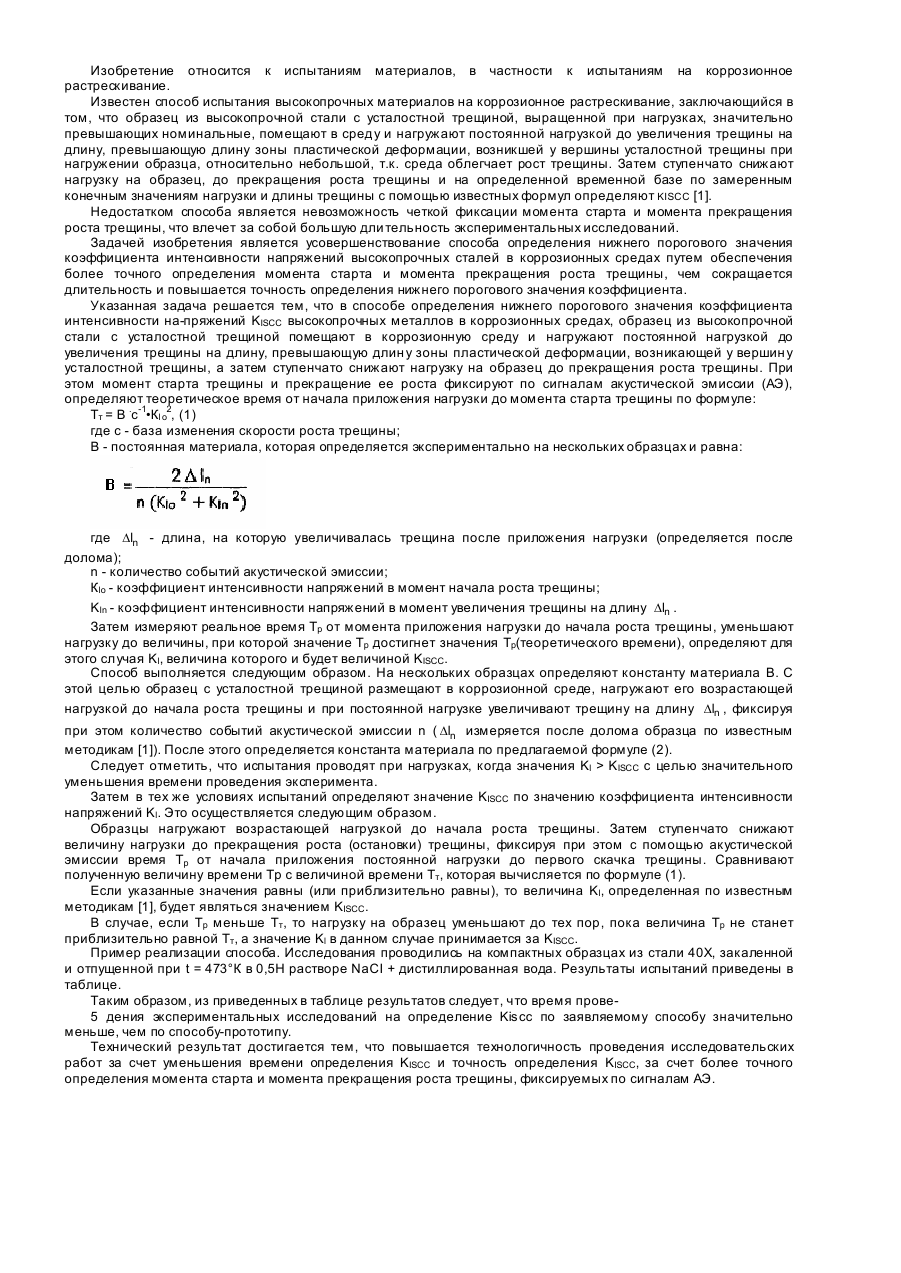
Способ определения нижнего порогового значения коэффициента интенсивности напряжений kiscc высокопрочных сталей в коррозионных средах, по которому используют образцы из исследуемого материала, один из образцов нагружают постоянной нагрузкой до увеличения трещины на длину, превышающую зону пластической деформации у вершины трещины, затем снижают нагрузку до прекращения роста трещины, определяют усилие, при котором трещина прекращает рост,...
Спосіб вимірювання теплофізичних характеристик матеріалів
Номер патенту: 3122
Опубліковано: 26.12.1994
Автори: Шведов Леонід Константинович, Золотухін Олександр Віталійович
МПК: G01N 25/18
Мітки: вимірювання, спосіб, матеріалів, характеристик, теплофізичних
Формула / Реферат:
Способ измерения теплофизических характеристик материалов, заключающийся в одновременном нагреве образца по линейному закону и периодическими импульсами, измерений приращения его температуры во времени, отличающийся тем, что, с целью повышопш производительности и информативности процесса измерения теплофизических характеристик материалов, особенно при значительных тепловых потерях, нагревают периодическими импульсами переднюю поверхность...
Попередній патент: Оптичний вимірювальний пристрій
Наступний патент: Спосіб формування кісетного шва
Випадковий патент: Пристрій для розселення комах, наприклад трихограми