Нашоломна система цілевказування
Номер патенту: 44009
Опубліковано: 15.07.2004
Автори: Черняк Сергій Іванович, Попов Віктор Гаврилович, Бузанов Віктор Іванович
Формула / Реферат
Нашоломна система цілевказування, що містить формувач візирної лінії, світловипромінювачі, які розташовані на шоломі, оптико-локаційні блоки, що містять оптичні вимірювальні канали зі скануючими обертальними призмами і датчиками кутів повороту призм, а також обчислювальний пристрій, який відрізняється тим, що оптико-локаційні блоки виконані як оптико-локаційний моноблок із заданою відстанню між скануючими призмами й можливістю їх синхронного обертання, а датчик кутів повороту призм є загальним для оптичних вимірювальних каналів.
Текст
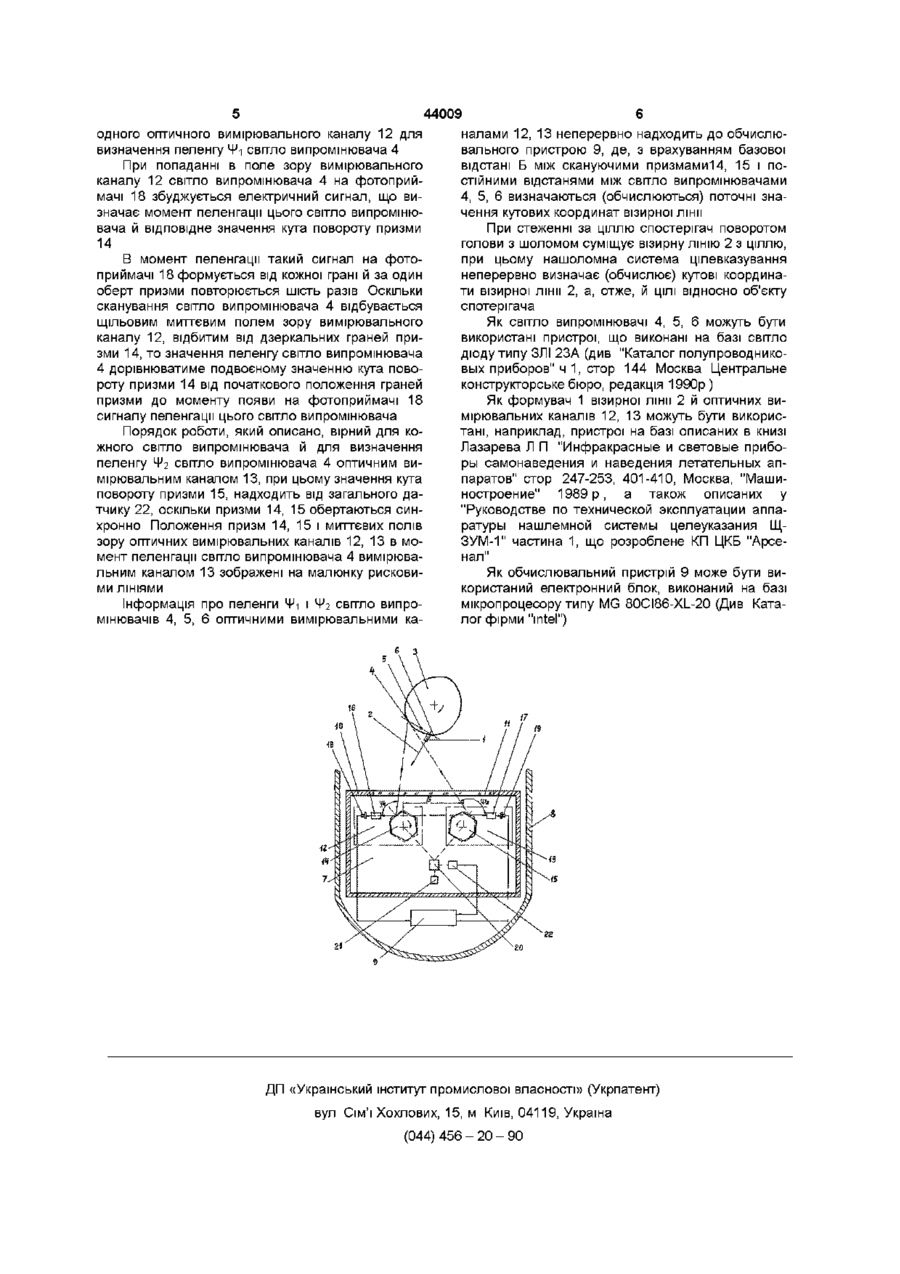
Нашоломна система цілевказування, що містить в собі формувач візирної лінії, світло випромінювачі, які розташовані на шоломі, оптико локаційні блоки, що містять в собі оптичні вимірювальні канали зі скануючими призмами, що обертаються, й датчиками кутів повороту призм, а також обчислювальний пристрій, який відрізняється тим, що оптико-локаційні блоки виконані у вигляді оптико-локаційного моноблока із заданою відстанню між скануючими призмами й можливістю їх синхронного обертання, а датчик кутів повороту призм виконаний як загальний для оптичних вимірювальних каналів Винахід стосується галузі будування нашоломних систем цілевказування, що визначають координати об'єкта, що спостерігається відносно об'єкта спостерігача, зокрема, проектуванню малогабаритних авіаційних систем цілевказування з використанням формувача візирної лінії, розташованого на шоломі (касці) льотчика й може бути застосований в авіації, космонавтиці, тренажеробудуванні та інших галузях техніки Відома велика КІЛЬКІСТЬ нашоломних систем цілевказування, що використовують різноманітні фізичні принципи побудови магнітні, оптичні, акустичні і т п Винахід стосується систем, що використовують принцип оптичної локації До таких нашоломних систем цілевказування належать, наприклад, системи за патентами США №3375375, МКІ HOIJ 3/14, опубл 1968р, Великобританії №1520154, МКИ G01C 21/00, опубл 1978р, Франції №2657154, МКІ F41G 3/02, опубл 1991р , яка описана в "Руководстве по технической эксплуатации аппаратуры нашлемной системы целеуказания Щ-ЗУМ-1" частина 1, що розроблено "КП ЦКБ "Арсенал", які в загальному випадку містять формувач візирної лінії, що розташований на шоломі, світло випромінювачі (датчики інфрачервоного випромінювання), що розташовані на шоломі чи борту об'єкта спостерігача, оптиколокаційні блоки (приймачі інфрачервоного випромінювання), що розташовані ВІДПОВІДНО на борту чи шоломі, а також обчислювальний пристрій Всі ВІДОМІ нашоломні системи цілевказування мають досить складні й громіздкі конструкції, що ускладнює їх регулювання при виготовленні, компановку та регулювання на борту об'єкта спостерігача Найближчою за технічною сутністю до запропонованого рішення є нашоломна система цілевказування, що обрана прототипом і описана в "Руководстве по технической эксплуатации аппаратуры нашлемной системы целеуказания ЩЗУМ-1", частина 1, що розроблено "КП ЦКБ "Арсенал" Ця система цілевказування містить формувач візирної лінії, що розташований на шоломі і являє собою коллімуючий оптичний пристрій з прицільною маркою, три інфрачервоні світло випромінювачі, що фіксують положення візирої лінії й розташовані в лобовій частині шолома, два оптиколокаційних блока, що пеленгують положення світло випромінювачів й розташовані в передній частині борта об'єкта спостерігача з можливістю сканування лобової частини шолома з розташованими на ній світло випромінювачами, а також обчислювальний пристрій, що визначає кутові координати ЦІЛІ за інформацією, що отримується від оптико-локаційних блоків Кожний оптико-локаційний блок містить в собі оптичний вимірювальний канал з багатогранною скануючою призмою, що обертається, та датчиком кутів повороту призми В цій системі встановлювальна відстань між оптико-локаційними блоками на об'єкті є базовою, тому вона має бути точною і стабільною при експлуатації Ця система цілевказування має ті ж недоліки, що й ІНШІ ВІДОМІ системи, а саме вони складні за конструкцією, виготовленням, розміщенням на о о 44009 борту об'єкта спостерігача, а також за регулюванням і контролем взаємного положення оптиколокаційних блоків при експлуатації Перед авторами стояла задача створення системи простішої за конструкцією, виготовленням і розміщенням на борту об'єкта, а також в обслуговуванні при експлуатації Поставлена задача досягається тим, що в нашоломній системі цілевказування, що містить в собі формувач візирної лінії, світло випромінювачі, які розташовані на шоломі, оптико-локаційні блоки, що містять в собі оптичні вимірювальні канали зі скануючими призмами, що обертаються й датчиками кутів повороту призм, а також обчислювальний пристрій, оптико-локаційні блоки виконані у вигляді оптико-локаційного моноблоку із заданою відстанню між скануючими призмами й можливістю їх синхронного обертання, а датчик кутів повороту призм виконаний як загальний для оптичних вимірювальних каналів Відстань між скануючими призмами є вихідним базовим параметром для обчислення кутових координат ЦІЛІ Вона може бути легко забезпечена при виготовленні моноблоку Синхронізація обертання призм забезпечується використанням загального приводу для їх обертання й дозволяє застосувати загальний датчик кутів повороту призм Вже саме розміщення одного моноблока на борту об'єкта є менш трудомістким, ніж двох оптиколокаційних блоків Усе, що перераховано вище, дозволяє створити компактнішу нашоломну систему цілевказування з меншою масою й об'ємом за рахунок зменшення КІЛЬКОСТІ конструктивних елементів, а також зменшити трудомісткість системи при виготовленні, монтажі на об'єкті й обслуговуванні при експлуатації КІЛЬКІСТЬ СВІТЛО випромінювачів, що фіксують положення візирної лінії, та їх положення на шоломі визначає положення оптико-локаційного моноблока на борту об'єкта спостерігача Сутність винаходу ілюструється на кресленні, що виконано для випадку розташування трьох світло випромінювачів на лобовій частиш шолому, Де 1 - формувач візирної лінії, 2 - візирна ЛІНІЯ, 14, 15, 3 - шолом, 4, 5, 6 - світло випромінювачі, 8 - борт об'єкта спостерігача, 9 - обчислювальний пристрій, 10 - корпус оптичного моноблока, 11 - захисне скло, 12, 13 - оптичні вимірювальні канали, 14, 15-скануючі призми, 16, 17 - оптичні коллімуючі пристрої, 18, 19-фотоприймачі, 20 - привід, 21 -електродвигун, 22 - датчик кута повороту призм, Б - базова відстань між призмами, 4*1 - пеленг світло випромінювача 4 призмою ^2 - пеленг світло випромінювача 4 призмою Нашоломна система цілевказування склада ється з формувача 1 візирної лінії 2, що встановлений на шоломі 3, інфрачервоних світловипромінювачів 4, 5, 6, що фіксують положення візирної лінії 2 й встановлені на шоломі так, щоб площина, яка переходить через світло випромінювачі 4, 5, 6 була перпендикулярна до візирної лінії 2, оптиколокаційного моноблока 7, що встановлений на борту 8 об'єкта спостерігача з боку світло випромінювачів 4, 5, 6, а також обчислювального пристрою 9, що встановлений на борту 8 об'єкта спостерігача й електрично пов'язаний з іншими частинами нашоломної системи цілевказування й бортовим обладнанням (на кресленні не вказані) Кожний зі світло випромінювачів 4, 5, 6 з метою відрізнити їх один від одного живиться імпульсною напругою, зсунутою в часі Оптико-локаційний моноблок 7 складається з корпусу 10 з захисним склом 11 Всередині корпусу 10 встановлено два оптичні вимірювальні канали 12, 13, кожен з яких складається з скануючої призми 14 (15), оптичного коллімуючого пристрою 16 (17) та фотоприймача 18 (19) Призма 14 (15) містить в собі шість дзеркальних відбиваючих граней, має вісь обертання й призначена для сканування полів випромінювання світло випромінювачів 4, 5, 6 Призми 14, 15 оптичних вимірювальних каналів 12 (13) обертаються синхронно від одного привода (редуктора) 20 за допомогою електродвигуна 21 Взаємне розташування призм 14, 15 визначається їх початковим встановленням та базовою відстанню Б Оптичний коллімуючий пристрій 16 (17) являє собою колліматор, що формує миттєве щільове поле зору шириною менше від 1°, і сфокусований в площину фотоприймача 18 (19) (див МІ Апенко та ш "Оптические приборы в машиностроении Справочник "Москва, "Машиностроение" 1974р Crop 168-169 ) Всередині корпусу 10 також встановлено датчик 22 кута повороту призм 14, 15, що підключений до загального приводу 20 Датчик 22 кута повороту призм являє собою кутовимірювальний пристрій з будь-яким принципом дії, що вимірює кути повороту з заданою точністю (див А С Елизаренко и др «Проектирование оптикоэлектронных приборов», Москва, «Машиностроение», 1981 г стр 128-138) Обчислювальний пристрій 9 призначений для обчислення кутових координат візирної лінії (або ЦІЛІ у випадку її супроводження візирною ЛІНІЄЮ) І може бути виконаний на базі мікропроцесору Нашоломна система цілевказування працює таким чином Кожен зі світло випромінювачів 4, 5, 6, що розташовані на шоломі 3, створює пульсуюче інфрачервоне світлове поле Ці ПОЛЯ скануються вузьким полем зору оптичних вимірювальних каналів 12, 13 оптико-локаційного моноблоку 7 за допомогою скануючих призм 14, 15 Одночасно за допомогою датчика 22 неперервно вимірюються поточні значення кутів повороту призм 14, 15 відносно початкового положення їх граней За початкове положення відбиваючих граней приймається, наприклад, положення їх перпендикулярності до осі оптичних колімуючих пристроїв 16, 17 Розглянемо зображену на кресленні роботу 44009 одного оптичного вимірювального каналу 12 для визначення пеленгу Ч^ світло випромінювача 4 При попаданні в поле зору вимірювального каналу 12 світло випромінювача 4 на фотоприймачі 18 збуджується електричний сигнал, що визначає момент пеленгації цього світло випромінювача й відповідне значення кута повороту призми 14 В момент пеленгації такий сигнал на фотоприймачі 18 формується від кожної грані й за один оберт призми повторюється шість разів Оскільки сканування світло випромінювача 4 відбувається щільовим миттєвим полем зору вимірювального каналу 12, відбитим від дзеркальних граней призми 14, то значення пеленгу світло випромінювача 4 дорівнюватиме подвоєному значенню кута повороту призми 14 від початкового положення граней призми до моменту появи на фотоприймачі 18 сигналу пеленгації цього світло випромінювача Порядок роботи, який описано, вірний для кожного світло випромінювача й для визначення пеленгу ^2 світло випромінювача 4 оптичним вимірювальним каналом 13, при цьому значення кута повороту призми 15, надходить від загального датчику 22, оскільки призми 14, 15 обертаються синхронно Положення призм 14, 15 і миттєвих полів зору оптичних вимірювальних каналів 12, 13 в момент пеленгації світло випромінювача 4 вимірювальним каналом 13 зображені на малюнку рисковими ЛІНІЯМИ Інформація про пеленги Ч^ і Ч^ світло випромінювачів 4, 5, 6 оптичними вимірювальними ка налами 12, 13 неперервно надходить до обчислювального пристрою 9, де, з врахуванням базової відстані Б між скануючими призмами14, 15 і постійними відстанями між світло випромінювачами 4, 5, 6 визначаються (обчислюються) поточні значення кутових координат візирної лінії При стеженні за ціллю спостерігач поворотом голови з шоломом суміщує візирну ЛІНІЮ 2 з ціллю, при цьому нашоломна система цілевказування неперервно визначає (обчислює) кутові координати візирної лінії 2, а, отже, й ЦІЛІ ВІДНОСНО об'єкту спотерігача Як світло випромінювачі 4, 5, 6 можуть бути використані пристрої, що виконані на базі світло діоду типу ЗЛІ 23А (див "Каталог полупроводниковых приборов" ч 1, crop 144 Москва Центральне конструкторське бюро, редакція 1990р) Як формувач 1 візирної лінії 2 й оптичних вимірювальних каналів 12, 13 можуть бути використані, наприклад, пристрої на базі описаних в книзі Лазарева Л П "Инфракрасные и световые приборы самонаведения и наведения летательных аппаратов" стор 247-253, 401-410, Москва, "Машиностроение" 1989 р, а також описаних у "Руководстве по технической эксплуатации аппаратуры нашлемной системы целеуказания ЩЗУМ-1" частина 1, що розроблене КП ЦКБ "Арсенал" Як обчислювальний пристрій 9 може бути використаний електронний блок, виконаний на базі мікропроцесору типу MG 80CI86-XL-20 (Див Каталог фірми "mtel") ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90
ДивитисяДодаткова інформація
Назва патенту англійськоюHelmet targeting system
Автори англійськоюBuzanov Viktor Ivanovych, Cherniak Serhii Ivanovych, Popov Viktor Havrylovych
Назва патенту російськоюНашлемная система целеуказания
Автори російськоюБузанов Виктор Иванович, Черняк Сергей Иванович, Попов Виктор Гаврилович
МПК / Мітки
МПК: F41G 3/22
Мітки: нашоломна, система, цілевказування
Код посилання
<a href="https://ua.patents.su/3-44009-nasholomna-sistema-cilevkazuvannya.html" target="_blank" rel="follow" title="База патентів України">Нашоломна система цілевказування</a>
Нашоломна система цілевказування
Номер патенту: 59434
Опубліковано: 15.09.2003
Автори: Бузанов Віктор Іванович, Попов Віктор Гаврилович, Черняк Сергій Іванович
МПК: F41G 3/22
Мітки: цілевказування, нашоломна, система
Формула / Реферат:
Нашоломна система цілевказування, яка містить формувач візирної лінії і світловипромінювачі, розташовані на шоломі, оптико-локаційні блоки і з’єднаний з ними обчислювальний пристрій, причому оптико-локаційні блоки жорстко з’єднані та встановлені з можливістю сканування бокової поверхні шолома з розташованими на ній світловипромінювачами, яка відрізняється тим, що щонайменше два світловипромінювачі закріплені на першій загальній жорсткій...
Нашоломна система цілевказування та індикації
Номер патенту: 50587
Опубліковано: 15.10.2002
Автори: Михайлик Олександр Костянтинович, Писарець Володимир Олексійович, Таранушко Георгій Іванович, Терещук Антоній Олексійович, Кравченко Володимир Йосипович, Прибилов Георгій Якович
МПК: G02B 23/02, G02B 27/30
Мітки: нашоломна, система, цілевказування, індикації
Формула / Реферат:
1. Нашоломна система цілевказування та індикації містить нашоломний візирний пристрій, оптико-електронні скануючі блоки та електронний блок, нашоломний візирний пристрій розташований на шоломі оператора, його вхід під'єднаний до виходу електронного блока, входи якого під'єднані до виходів скануючих блоків, розташованих таким чином, що випромінювачі, розташовані на шоломі оператора, знаходяться постійно в полі зору обох скануючих блоків, при...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказування для його реалізації
Номер патенту: 47969
Опубліковано: 15.09.2003
Автори: Черняк Сергій Іванович, Кадочніков Сергій Михайлович, Ліпунова Валентина Григорівна
МПК: F41G 3/22
Мітки: цілевказування, візира, визначення, нашоломна, орієнтації, осі, система, реалізації, спосіб
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Система цілевказування
Номер патенту: 36943
Опубліковано: 15.04.2003
Автори: Борисюк Анатолій Олексійович, ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: G01B 11/26, F41G 1/00
Мітки: система, цілевказування
Формула / Реферат:
1. Система цілевказування оператора, яка містить розміщені на шоломі оператора реперні елементи, які формують дані орієнтації шолому, та блок індикації з оптичним вузлом виведення зображення індикації в поле зору оператора, а також розміщені поза шоломом засіб оптичної локації, блок синхронізації та блок формування сигналів цілевказування, яка відрізняється тим, що реперні елементи, не менше трьох, розміщені в єдиній конструктивній збірці з...
Оптико-електронна система огляду та цілевказування
Номер патенту: 35913
Опубліковано: 17.02.2003
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: F41G 3/22
Мітки: оптико-електронна, цілевказування, огляду, система
Формула / Реферат:
1. Оптико-електронна система огляду та цілевказування, яка містить прилад нічного бачення, до складу якого входять послідовно з'єднані об'єктив, блок перетворення вхідного зображення та блок візуалізації зображення, реперний вузол, виконаний у вигляді набору реперних елементів, а також пристрій дистанційного визначення орієнтації реперного вузла та блок формування кутів цілевказування, яка відрізняється тим, що реперний вузол конструктивно...
Попередній патент: Спосіб кріплення привибійної зони пласта
Випадковий патент: Спосіб і пристрій для відновлення залізооксидовмісної вихідної сировини у відновному реакторі високого тиску