Ваги вагонні з визначенням відхилень центра ваги вагона

Формула / Реферат
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, встановлені по кутах платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, введені чотири суматори, чотири аналого-цифрових перетворювачі, клавіатура та індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний зі входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, при цьому відхилення центра ваги вагона відносно повздовжньої осі вираховується мікропроцесорним контролером за формулою
![]() ,
,
а відхилення центра ваги вагона відносно поперечної осі вираховується мікропроцесорним контролером за формулою
![]() ,
,
причому в цих формулах:
L - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії; Б - база вагона; Gлб, Gпб - маса лівого та правого бортів вагона, відповідно, які вираховуються за формулами:
Gлб = G1лб + G2лб,
Gпб = G1пб + G2пб,
Gm1, Gm2 - маса першого та другого візків, відповідно, які вираховуються за формулами:
Gm1 = G1лб + G1пб,
Gm2 = G2лб + G2пб,
де G1лб, G1пб, G2лб, G2пб - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка,
при цьому вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора.
Текст
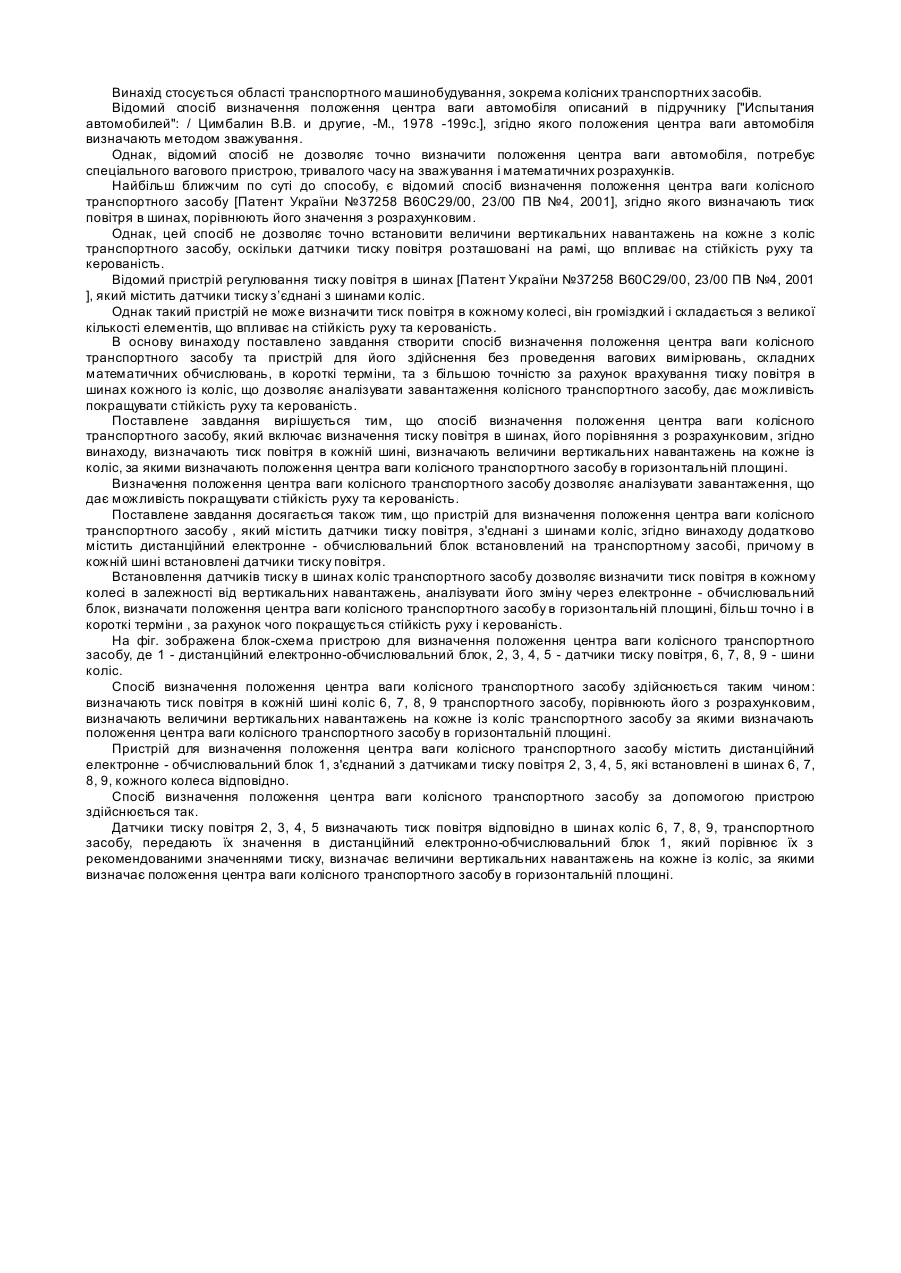
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, встановлені по кутах платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, введені чотири суматори, чотири аналого-цифрових перетворювачі, клавіатура та індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний зі входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, при цьому відхилення центра ваги вагона відносно повздовжньої осі вираховується мікропроцесорним контролером за формулою 2 3 риймальних платформ, кожна з яких спирається на чотири ваговимірювальні датчики, які встановлені по кутам платформи, та мікропроцесорного контролеру, який має в своєму складі енергонезалежну пам'ять для зберігання результатів зважувань, інтерфейс для підключення принтеру, інтерфейс для підключення ПСОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, введені чотири суматори, при чому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний зі входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, при цьому відхилення центра тяжіння вагона відносно повздовжньої осі вираховується по формулі L (G лб Gпб) y 2Gв , а відхилення центра тяжіння вагона відносно поперечної осі вираховується по формулі x Б (Gm1 Gm 2 ) 2Gв , при чому в цих формулах: L – відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії мм; Б - база вагону, мм; Gлб, Gпб - маса лівого та правого бортів вагона, відповідно, які вираховується по формулах: Gлб = G1лб + G2лб Gпб = G1nб + G2пб Gm1, Gm2 - маса першого та другого возків, відповідно, які вираховується по формулах: Gm1 = G1лб + G1пб Gm2 = G2лб + G2пб G1лб. G1лб, G2лб. G2лб - маса лівого борту першого візка, маса правого борту першого візка, маса лівого борту другого візка, маса правого борту другого візка, відповідно, сигнали про які з'являються на виходах відповідних суматорів. Таким чином, в результаті роботи пристрою на індикаторі виникає інформація про фактичне відхилення центра тяжіння вагону відносно кожної з осей, а це дає можливість оператору ваг скорегувати процес завантаження вагону таким чином, щоб допуски, які вимагає залізниця, були виконані. Дана сукупність суттєвих ознак дозволяє, в порівнянні з найближчим аналогом, забезпечити відповідність вимогам залізниці кожного вагона, який зважується на цих вагах та уникати штрафів за некоректне положення вантажу у вагоні. Структурна схема ваг, що пропонується, відображена на фіг. 1. Пристрій, що пропонується, має дві вантажоприймальні платформи 1 та 2, кожна з яких спирається на чотири ваговимірювальні датчики 3.1, 3.2, 3.3, 3.4 на першій платформі, та на чотири ваговимірювальні датчики 4.1, 4.2, 4.3, 4.4 другій платформі, мікропроцесорного контролера 5, який має в енергонезалежну пам'ять 6 для зберігання результатів зважувань, інтерфейс 7 для підключення принтеру, інтерфейс 8 для підключення ПЄОМ, 47685 4 інтерфейс 9 для підключення виносного інформаційного табло, інтерфейс 10 для підключення каналів телеметрії, а також чотири суматори 11.1, 11.2, 11.3, 11.4 сигналів датчиків ваговимірювальних, чотири аналого-цифрових перетворювача 12.1, 12.2,12.3, 12.4, клавіатуру 13 та індикатор 14. Пристрій працює таким чином. Кожен возок вагона розміщується на своїй платформі, а сигнали від датчиків ваговимірювальних складаються попарно кожним суматором. Таким чином, на виході суматора 11.1 виникає сигнал, який є сумою сигналів датчиків 3.1 та 3.2. Ця сума пропорційна масі лівої сторони першого візка. На виході суматора 11.2 виникає сигнал, який є сумою сигналів датчиків 3.3 та 3.4. Ця сума пропорційна масі правої сторони першого візка. На виході суматора 11.3 виникає сигнал, який є сумою сигналів датчиків 3.5 та 3.6. Ця сума пропорційна масі лівої сторони другого візка. На виході суматора 11.4 виникає сигнал, який є сумою сигналів датчиків 3.7 та 3.8. Ця сума пропорційна масі правої сторони другого візка. Мікропроцесорний контролер 5 сумує сигнали з виходів суматорів 11.1 та 11.2 в результаті чого получає сигнал Gm1, пропорційній масі першого возка, а сума сигналів від виходів суматорів 11.3 та 11.4 дає масу Gm2 другого возка. Мікропроцесорний контролер 5 сумує також сигнали з виходів суматорів 11.1 та 11.3, в результаті чого получає сигнал Gлб пропорційній масі лівого боку вагона, а сума сигналів від виходів суматорів 11.2 та 11.4 дає масу Gnб правого боку вагона. Мікропроцесорний контролер 5 вираховує відхилення y центру тяжіння вагону відносно повздовжньої осі по формулі: L (Gлб Gпб ) L (Gлб Gпб ) y 2 (Gm1 Gm 2 ) 2Gв Мікропроцесорний контролер 5 вираховує відхилення x центру тяжіння вагону відносно поперечної осі по формулі: Б (G m1 G m2 ) Б (G m1 G m2 ) x 2 (G m1 G m2 ) 2G в В цих формулах: L - ширина колії вагону (мм) та Б - база вагону (мм) - параметри, які вводяться до мікропроцесорного контролеру 5 з клавіатури 13; Gлб, Gпб - маса лівого та правого бортів вагону, відповідно, які вираховуються мікропроцесорним контролером 5 по формулах: Gлб = G1лб + G2лб Gпб = G1пб + G2пб; Gm1, Gm2 - маса першого та другого возків, відповідно, які вираховуються мікропроцесорним контролером 5 по формулах: Gm1 = G1лб + G1пб Gm2 = G2лб + G2пб тут G1лб. G1лб, G2лб. G2лб - маса лівого борту першого візка, маса правого борту першого візка, маса лівого борту другого візка, маса правого борту другого візка, відповідно, сигнали про які з'являються на виходах суматорів 11.1, 11.2, 11.3 та 11.4, відповідно, та через аналого-цифрові перет 5 47685 ворювачі 12.1, 12.2, 12.3 ти 12.4, відповідно, поступають на входи мікропроцесорного контролера 5. Всі результати вирахування передаються мікропроцесорним контролером до індикатора 14 та відображаються на ньому, що дає можливість оператору контролювати процес завантаження вагону та впливати, при необхідності, на нього. Викладене вище підтверджує наявність причинно-наслідкових зв'язків між сукупністю суттєвих ознак винаходу, що заявляється, та технічним результатом, що досягається. Комп’ютерна верстка І.Скворцова 6 Дана сукупність суттєвих ознак дозволяє, в порівнянні з найближчим аналогом, визначити відхилення центра тяжіння вагона відносно повздовжньої та поперечної осей що, в свою чергу, дає можливість вдоволення потреб залізниці у центруванні вантажу вагонів при їх відвантаженні. Пропонований пристрій введений в експлуатацію на вагонних вагах, які працюють на ВАТ «Кіровоградграніт» та ВАТ «Маріупольский металургійний комбінаті імені Ілліча». Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCar scales with determination of deflection of center of weight of the car
Автори англійськоюBuhaienko Heorhii Yakovych
Назва патенту російськоюВесы вагонные с определением отклонений центра тяжести вагона
Автори російськоюБугаенко Георгий Яковлевич
МПК / Мітки
МПК: G01G 19/00
Мітки: центра, ваги, вагона, відхилень, вагонні, визначенням
Код посилання
<a href="https://ua.patents.su/3-47685-vagi-vagonni-z-viznachennyam-vidkhilen-centra-vagi-vagona.html" target="_blank" rel="follow" title="База патентів України">Ваги вагонні з визначенням відхилень центра ваги вагона</a>
Спосіб визначення положення центра ваги колісного транспортного засобу і пристрій для його здійснення
Номер патенту: 69620
Опубліковано: 15.09.2004
Автори: Мальнов Сергій Іванович, Козлинський Мирослав Петрович, Денис Василь Володимирович, Плешкановський Олег Валентинович
МПК: B60C 23/00
Мітки: ваги, транспортного, колісного, положення, засобу, центра, визначення, спосіб, пристрій, здійснення
Формула / Реферат:
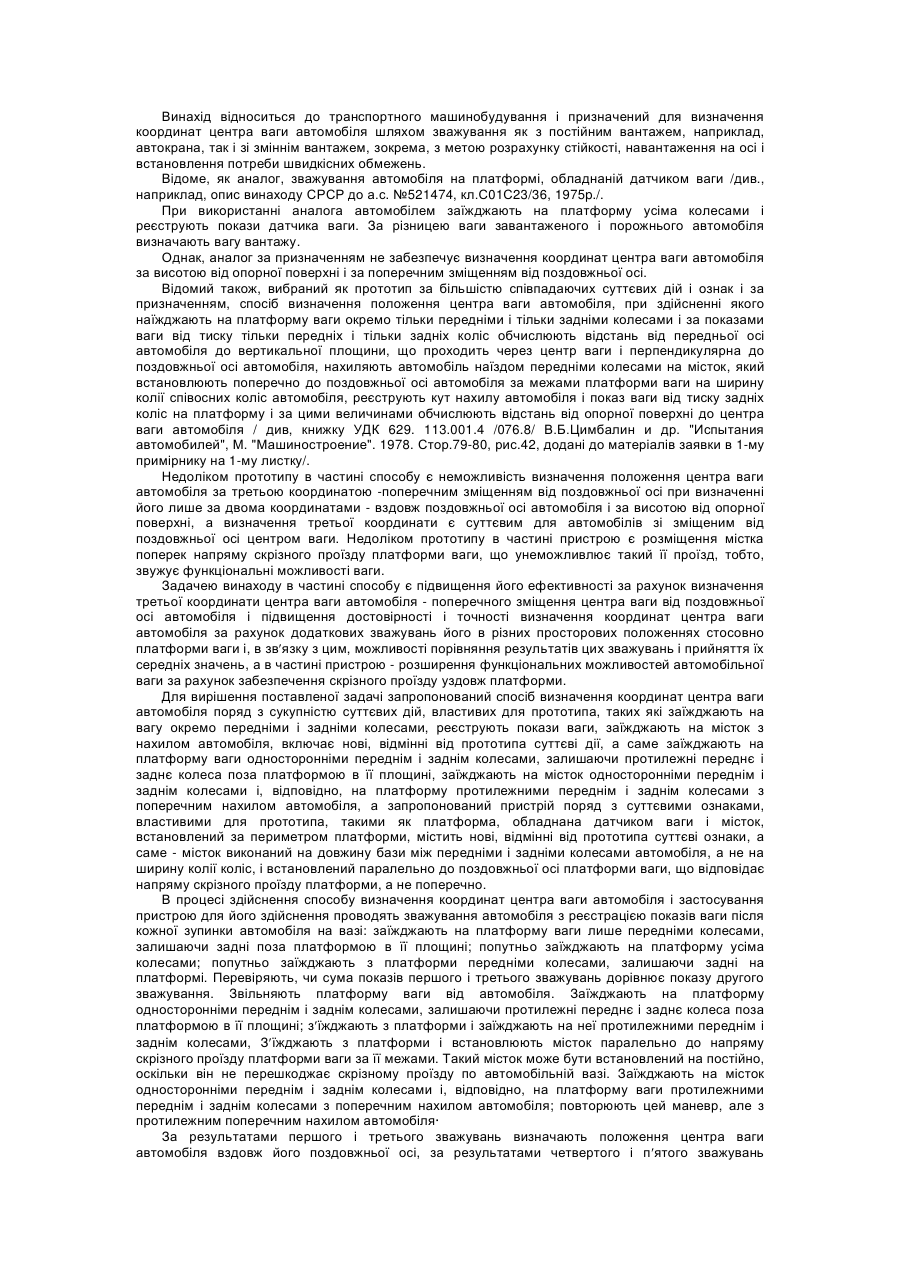
1. Спосіб визначення положення центра ваги колісного транспортного засобу, що включає визначення тиску повітря в шинах, його порівняння з розрахунковим, який відрізняється тим, що визначають тиск повітря в кожній шині коліс, визначають величини вертикальних навантажень на кожне із коліс, за якими визначають положення центра ваги колісного транспортного засобу в горизонтальній площині.2. Пристрій для визначення положення центра ваги...
Спосіб визначення координат центра ваги автомобіля і пристрій для його здійснення
Номер патенту: 71950
Опубліковано: 17.01.2005
Автори: Кобільник Микола Степанович, Швідлер Олександр Петрович, Хом'як Роман Ілліч, Коваленко Володимир Ілліч
МПК: G01G 9/00, G01G 19/02, G01M 1/12
Мітки: ваги, центра, визначення, автомобіля, спосіб, здійснення, пристрій, координат
Формула / Реферат:
1. Спосіб визначення координат центра ваги автомобіля, при здійсненні якого заїжджають автомобілем на ваги окремо передніми і задніми колесами, реєструють покази ваг, заїжджають одночасно на ваги і на місток з нахилом автомобіля, який відрізняється тим, що заїжджають на платформу ваг односторонніми переднім і заднім колесами, залишаючи протилежні переднє і заднє колеса поза платформою, заїжджають на місток односторонніми переднім і заднім...
Спосіб визначення положення центра ваги колісного транспортного засобу
Номер патенту: 19716
Опубліковано: 15.12.2006
Автори: Козлинський Мирослав Петрович, Палюх Володимир Михайлович, Слюсаренко Олександр Іванович, Бурковський Анатолій Сергійович, Білодід Володимир Петрович, Житенко Олександр Вікторович
МПК: B60C 23/00
Мітки: положення, засобу, транспортного, колісного, центра, ваги, визначення, спосіб
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим та визначення величини вертикальних навантажень на кожне із коліс, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс та величини вертикальних навантажень на кожне із коліс при прямолінійному русі під час розгону, за якими визначають положення центра ваги у...
Пристрій для визначення положення центра ваги колісного транспортного засобу
Номер патенту: 19719
Опубліковано: 15.12.2006
Автори: Палюх Володимир Михайлович, Козлинський Мирослав Петрович, Білодід Володимир Петрович, Бурковський Анатолій Сергійович, Житенко Олександр Вікторович, Іванов Олександр Миколайович
МПК: B60C 23/00
Мітки: транспортного, колісного, визначення, центра, положення, пристрій, ваги, засобу
Формула / Реферат:
Пристрій для визначення положення центра ваги колісного транспортного засобу, що містить датчики тиску повітря, з'єднані з шинами коліс та дистанційним електронно-обчислювальним блоком, який відрізняється тим, що додатково містить датчик прискорення, встановлений на рамі транспортного засобу та з'єднаний з дистанційним електронно-обчислювальним блоком.
Пристрій для визначення положення центра ваги колісного транспортного засобу у вертикальній площині

Номер патенту: 22054
Опубліковано: 10.04.2007
Автори: Денис Василь Володимирович, Козлинський Мирослав Петрович
МПК: B60C 23/00
Мітки: транспортного, пристрій, колісного, площині, ваги, положення, засобу, центра, вертикальний, визначення
Формула / Реферат:
Пристрій для визначення положення центра ваги колісного транспортного засобу у вертикальній площині, який містить датчики тиску повітря, з'єднані з шинами коліс, дистанційний електронно-обчислювальний блок, який відрізняється тим, що додатково містить датчик прискорення, з'єднаний дистанційно з електронно-обчислювальним блоком.
Попередній патент: Теплообмінний апарат
Наступний патент: Двері
Випадковий патент: Задній кріпильний пристрій для авіаційного двигуна