Спосіб розпізнавання плоских геометричних фігур
Формула / Реферат
Спосіб розпізнавання плоских геометричних фігур, що полягає у перетворенні зображення фігури в набір сигналів, який відрізняється тим, що проектують зображення фігури на фоточутливий елемент, виділяють вершини фігури і визначають відстані між сусідніми вершинами, визначають площу та периметр фігури шляхом підрахунку точок, що належать контуру та площині зображення фігури, формують вектор ознак, до якого входять величини площини, периметра, кількості вершин та величин відстаней між сусідніми вершинами, порівнюють значення отриманого вектора із значеннями еталонних векторів, за ступенем співпадання векторів визначають фігуру, що розпізнають.
Текст
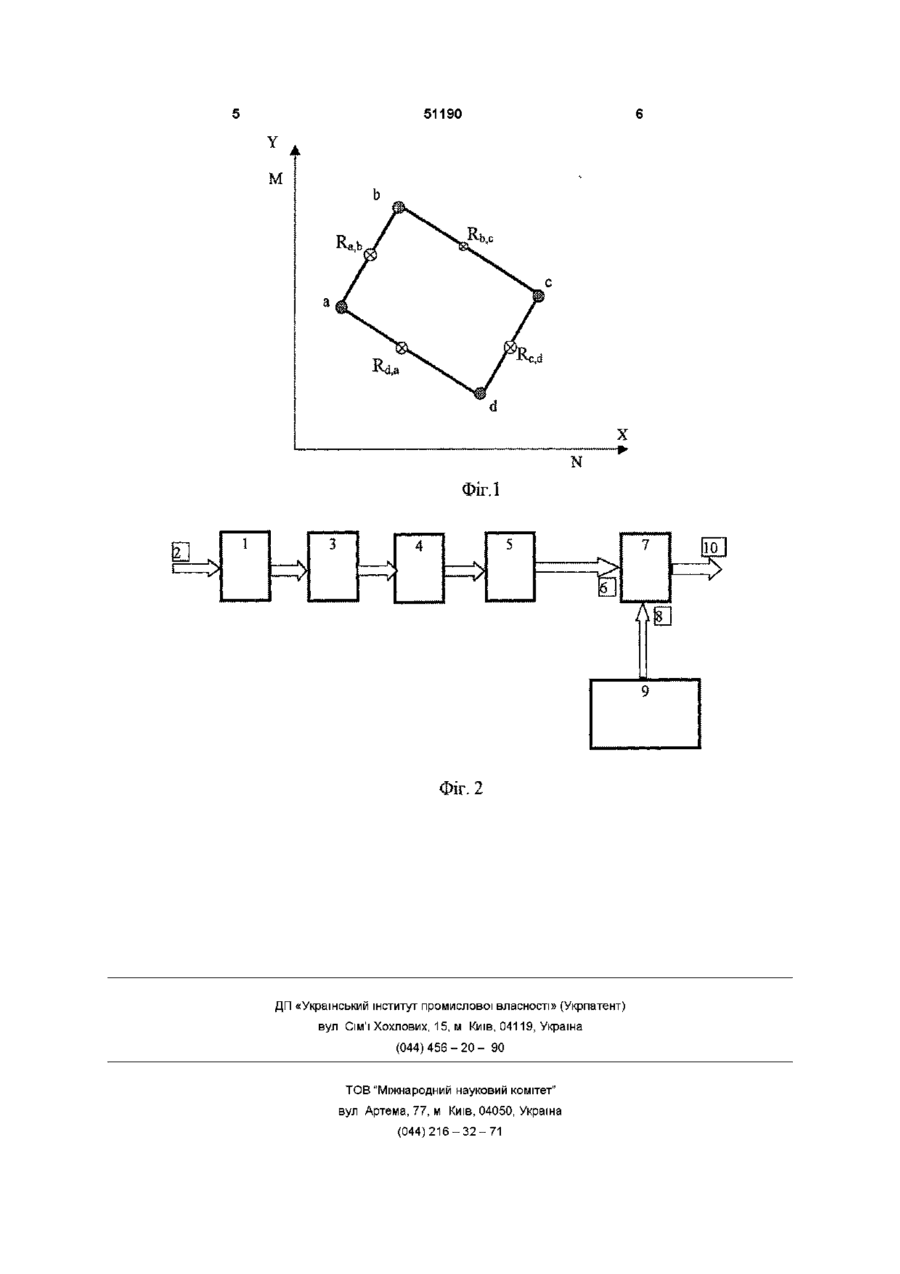
Спосіб розпізнавання плоских геометричних фігур, що полягає у перетворенні зображення фігури в набір сигналів, який відрізняється тим, що проектують зображення фігури на фоточутливий Винахід відноситься до автоматики і обчислювальної техніки і може бути використаний при розпізнаванні плоских фігур в роботехніці, в системах технічного зору, при аналізі мікробіологічних препаратів і рентгенограм і т п Відомо спосіб розпізнавання геометричних фігур (А С СССР №446087, 1974р), заснований на скануванні і перетворенні зображення фігури в ПОСЛІДОВНІСТЬ широтномодульованих імпульсів, построково сканують участки зображення об'єкта з наступним перетворенням у відеосигнали з одночасним формуванням сумарних сигналів і порівнянням з еталонними сигналами Недоліком даного способу є обмежена галузь використання, в зв'язку з нешваріантністю або частковою інваріантністю до афінних перетворень об'єктів, що досліджуються в полі аналізу, а також низька швидкодія Відомо спосіб розпізнавання геометричних фігур (А С СССР №1020840, БИ №20, 1983г), який заснований на скануванні і перетворенні зображення фігури в ПОСЛІДОВНІСТЬ широтномодульованих імпульсів, сканують зображення фігури при безперервній ЗМІНІ кута сканування, перетворюють для кожного кута сканування ПОСЛІДОВНІСТЬ широтноімпульсних сигналів в інтегральні сигнали, виділяють в інтегральних сигналах ПОСЛІДОВНІСТЬ екстремальних рівнів, фіксують КІЛЬКІСТЬ екстремальних рівнів і глобальний екстремальний рівень у виділеній ПОСЛІДОВНОСТІ, по яких судять про фігуру, що розпізнається Недоліком даного способу є вузька галузь ви елемент, виділяють вершини фігури і визначають відстані між сусідніми вершинами, визначають площу та периметр фігури шляхом підрахунку точок, що належать контуру та площині зображення фігури, формують вектор ознак, до якого входять величини площини, периметра, КІЛЬКОСТІ вершин та величин відстаней між сусідніми вершинами, порівнюють значення отриманого вектора із значеннями еталонних векторів, за ступенем співпадання векторів визначають фігуру, що розпізнають користання за рахунок неможливості розпізнавання будь-яких фігур, змінивших свою орієнтацію в полі аналізу, а також низька швидкодія в зв'язку з необхідністю сканування зображення в багатьох напрямках Найбільш близьким за змістом є спосіб розпізнавання геометричних фігур (А С СССР №1376109, БИ №7, 1988г) в якому, згідно способу по А С СССР № 1020840, підчас появи експериментальних рівнів інтегральних сигналів формують сигнали тимчасового відрахунку, формують результуючі сигнали, пропорційні ВІДПОВІДНИМ сигналам тимчасового відрахунку і оберненопропор О ЦІЙНІ ВІДПОВІДНИМ експериментальним рівням інте гральних сигналів, і по отриманій ПОСЛІДОВНОСТІ результуючих сигналів визначають фігуру, що розпізнається Недоліком даного способу є низька швидкодія за рахунок необхідності сканування фігури в багатьох напрямках, а також вузька галузь використання за рахунок розпізнавання будь-яких фігур, змінивших свою орієнтацію в полі аналізу В основу винаходу поставлена задача створення способу для розпізнавання плоских фігур, який дозволяє за невеликий об'єм часу розпізнати будь-яку плоску фігуру, змінивши свою орієнтацію в полі аналізу Це досягається за рахунок формування вектору ознак, до якого входять величини площі, периметру, КІЛЬКОСТІ вершин та відстаней між сусідніми вершинами Для визначення даних величин не використовується сканування поля аналізу в багатьох напрямках, що підвищує швид ю 51190 кодію способу, а також розширює галузь його виеталонних векторів, враховуючи ПОСЛІДОВНІСТЬ користання відношень у векторі За степенем співпадання коПоставлена задача вирішується тим, що спожної ознаки визначають фігуру, що розпізнається сіб розпізнавання плоских геометричних фігур, що Пристрій, що реалізує запропонований спосіб полягає в перетворенні зображення фігури в набір (фіг 2) містить блок 1 вводу (БВ), вхід якого є вхід сигналів, проецирують зображення фігури на фо2 пристрою, а вихід під'єднаний до входу блоку З точутливий елемент, виділяють вершини фігури і виділення країв і вершин (БВКВ), вихід якого з'єдвизначають відстані між сусідніми вершинами, наний з входом блоку 4 формування відношень визначають площу та периметр фігури шляхом між вершинами (БФВ), вихід якого з'єднаний з вхопідрахунку точок, що належать контуру та площині дом блоку 5 формування і суміщення векторів зображення фігури, формують вектор ознак, до (БФСВ), вихід якого підключений до першого входу якого входять величини площини, периметра, КІЛЬ6 блоку 7 порівняння (БП), другий вхід 8 якого підКОСТІ вершин та величин відстаней між сусідніми ключений до виходу блоку 9 еталонів (БЕ), вихід вершинами, порівнюють значення отриманого векдо виходу 10 пристрою тору із значеннями еталонних векторів, со степеЗапропонований спосіб реалізується в принем співпадання векторів визначають фігуру, що строї наступним чином розпізнають Геометрична фігура, що досліджується, подається на вхід 2 пристрою і поступає на БВ1, який На фіг 1 представлено графічне пояснення перетворює зображення фігури на вході в сукупспособу, а на фіг 2 - структурно-функціональна ність сигналів, найбільш зручних для обробки Зосхема пристрою, що реалізує даний спосіб браження на виході БВ1 подає з себе масив 0-івта Сутність винаходу полягає в наступному На 1-ць, в якому 1 кодує належність точки фігурі, а 0 початку зображення фігури наносять на рецепторналежність фону не поле системи розпізнавання В отриманій фігурі виділяють її вершини На фіг 1 показано чотирикуБВКВЗ виділяє вершини та краї фігури, врахотник з виділеними вершинами а, в, с, d Між данивуючи ступеневий ефект Після БВКВЗ зображенми сусідніми по периметру вершинами визначають ня надходить на БФВ4, в якому обчислюються відстані, які подаються в вигляді КІЛЬКОСТІ ТОЧОК відстані між виділеними вершинами і довжина пе(пікселів), які належать контуру на даному проміжриметру БФВ4 також обчислює площу фігури, ку На фіг 1 відстані позначені Ra ь, Rb о, Re сі, Rci a шляхом підрахунку КІЛЬКОСТІ ОДИНИЦЬ (ТОЧОК фігури) з урахуванням площини одного точкового дисКрім того, визначають площу та периметр фікрета зображення гури, які подаються також КІЛЬКІСТЮ пікселів, при цьому враховуються геометричні параметри кожВ БФСВ5 дані з блоку 4 формуються у вектор ного пікселя Якщо площа залежить від площини ознак, який поступає на перший вхід 6 БП7, на одного пікселя, то величина периметру залежить другий вхід 8 БП7 подаються еталонні вектори з від напрямку відрізку і структури мозаїки самого виходу БЕ9 і порівнюються з отриманими По степікселя В даному випадку враховується розташупені наближеності до вектору еталону оцінюється вання сусідніх пікселів, що належать контуру і фігура на вході пристрою Результат оцінювання обирається або довжина діагоналі пікселя або подається на вихід 10 довжини його сторін, які можуть мати різні значенВиділення вершин, країв та обчислення площі ня Це також враховується і при визначенні велифігури здійснюється за 1 такт, а час обчислення чини Ry відстаней між вершинами залежить від найбільшої довжини Використовуючи отримані величини формується вектор ознак, який подається наступним виТаким чином, запропонований спосіб дозволяє глядом розширити галузь його використання, за рахунок V = , розпізнавання будь-яких двомірних фігур, які змінили своє місце розташування в полі аналізу вхідде S - площа фігури, Р - периметр, К - КІЛЬКІСТЬ ної апертури системи При цьому підвищується вершин, а, - і-та вершина, Ru+i - відношення між і-ю швидкодія розпізнавання за рахунок усунення нета (і+1)-ю вершинами обхідності сканування поля зображення в багатьох ПОСЛІДОВНІСТЬ вершин і відношення між ними у напрямках Крім того, спосіб дозволяє нарощувати векторі повинна починатись з першої обраної веКІЛЬКІСТЬ еталонів за рахунок подання на вхід норшини і закінчуватись відношенням Rki між останвих зображень ньою та першою вершинами Отриманий вектор порівнюють із значенням 51190 Y M R; h •e X N Фіг.1 Фіг. 2 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for identifying planar geometric figures
Автори англійськоюBilan Stepan Mykolaiovych
Назва патенту російськоюСпособ распознавания плоских геометрических фигур
Автори російськоюБилан Степан Николаевич
МПК / Мітки
Мітки: геометричних, фігур, плоских, розпізнавання, спосіб
Код посилання
<a href="https://ua.patents.su/3-51190-sposib-rozpiznavannya-ploskikh-geometrichnikh-figur.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання плоских геометричних фігур</a>
Спосіб розпізнавання плоских геометричних фігур
Номер патенту: 48903
Опубліковано: 15.08.2002
Автори: Домбровська Наталія Валентинівна, Білан Степан Миколайович, Бендерук Ірина Миколаївна, Южаков Сергій Васильович
Мітки: геометричних, спосіб, плоских, фігур, розпізнавання
Формула / Реферат:
Спосіб розпізнавання плоских геометричних фігур, який полягає в тому, що сканують і перетворюють зображення в послідовність сигналів, який відрізняється тим, що визначають функцію площі перетину вхідної фігури та її копії, паралельно зсувають копію фігури і на кожному кроці зсуву визначають площу перетину вхідної фігури та її копії, проводять зсув до отримання площі перетину, яка дорівнює нулю, що відповідає максимальному зсуву у відповідному...
Оптична система з виділенням рухомих фігур
Номер патенту: 28745
Опубліковано: 16.10.2000
Автор: Чугуй Володимир Леонідович
МПК: G02B 23/00
Мітки: виділенням, фігур, рухомих, система, оптична
Формула / Реферат:
Оптична система з виділенням рухомих фігур, яка вміщує канал візира, в якому розміщені об’єктив, обертальна система, окуляр, яка відрізняється тим, що в канал візира додатково залучені перший світлоділильний куб, прозора пластина з рисками у вигляді сітки, другий світлоділильний куб, перший світлоділильний куб, розміщений по ходу променів між об’єктивом і обертальною системою, пластина, розміщена між першим світлоділильним кубом і...
Спосіб розпізнавання зображень
Номер патенту: 39442
Опубліковано: 15.06.2001
Автори: Русин Богдан Павлович, Остап Володимир Петрович, Остап Олег Петрович
МПК: G06K 9/68
Мітки: зображень, спосіб, розпізнавання
Формула / Реферат:
1. Спосіб розпізнавання зображень, згідно з яким формують вхідне оцифроване растрове зображення, порівнюють з еталонними оцифрованими растровими зображеннями, вхідне і еталонні зображення подають на блок двомірного прямого швидкого дискретного перетворення Фур'є, на виході отримують масиви просторових спектрів вхідного і еталонних зображень, який відрізняється тим, що масиви просторових спектрів вхідного і еталонних зображень подають на вхід...
Спосіб автоматичного розпізнавання номера тварини по його коду

Номер патенту: 33370
Опубліковано: 15.02.2001
Автори: Березюк Сергій Вікторович, Версаль Віктор Олександрович, Ващенко Борис Іванович, Кислун Олег Андрійович
МПК: A01K 29/00
Мітки: спосіб, автоматичного, коду, номера, тварини, розпізнавання
Текст:
...параметра і формуванні кода номера тварини, згідно винаходу завдання значення порогів г\ь визначається окремо для кожної к-ї фіксованої частоти та виконується шляхом запам'ятовування їх значень після обчислення ча формулою' flk=Kk-M(Ak|H0), (1) де Кк - коефіцієнт, що визначається конструктивною особливістю джерела електромагнітного поля, та встановлюється окремо для кожної фіксованої частоти; M(AiJHo) - математичне чекання...
Спосіб розпізнавання об’єкта за зональними інфрачервоними аерознімками
Номер патенту: 32212
Опубліковано: 15.12.2000
Автор: Станкевич Сергій Арсенійович
МПК: G01S 17/00
Мітки: об'єкта, інфрачервоними, спосіб, розпізнавання, аерознімками, зональними
Текст:
...розпізнавання об'єкта за зональними інфрачервоними аерознімками [3], який грунтується на апроксимації залежності 6^(Л) експонентою вигляду є( = Єо ехр( ~ щ А() , (5) де єо і CCQ - невідомі параметри апроксимації, та включає сприймання теплового випромінювання не менш ніж в трьох довільно розташованих спектральних діапазонах з різними значеннями ефективної довжини хвилі, визначення істинної температури Т о і коефіцієнтів теплового...
Попередній патент: Пристрій для повороту візка вантажного вагона
Наступний патент: Кінцевий перетворювач окремих мод
Випадковий патент: Поверхневий теплообмінник для конденсування водяної пари та ефірної олії