Пристрій для вимірювання параметрів транспортних потоків
Номер патенту: 60154
Опубліковано: 10.06.2011
Автори: Денисенко Олег Васильович, Левтеров Андрій Іванович, Ярута Антон Миколайович
Формула / Реферат
Пристрій для вимірювання параметрів транспортних потоків, що складається з датчика лазерного випромінювання інфрачервоного діапазону, оптичного модулятора, генератора розгортки, лічильника-дешифратора, підсилювачів, дискретного сканера, задавального генератора, елемента визначення частоти доплерівського зсуву сигналу, перетворювача частоти зсуву сигналу і фотоприймача, причому генератор розгортки через лічильник-дешифратор, що послідовно сполучений з підсилювачами, підключений до дискретного сканера, задавальний генератор через резонансний підсилювач підключений до оптичного модулятора, датчик лазерного випромінювання оптично з'єднаний через оптичний модулятор з дискретним сканером, який відрізняється тим, що фотоприймач виконано з можливістю повороту синхронно з поворотом датчика лазерного випромінювання, елемент визначення частоти доплерівського зсуву сигналу виконано в вигляді двократного перетворювача частоти, перетворювач частоти зсуву сигналу виконано у вигляді вимірювача частоти, причому двократний перетворювач частоти підключений першим входом до виходу задавального генератора, а другим входом - до виходу фотоприймача, вихід двократного перетворювача частоти підключений до вимірювача частоти та високочастотного детектора,
Текст
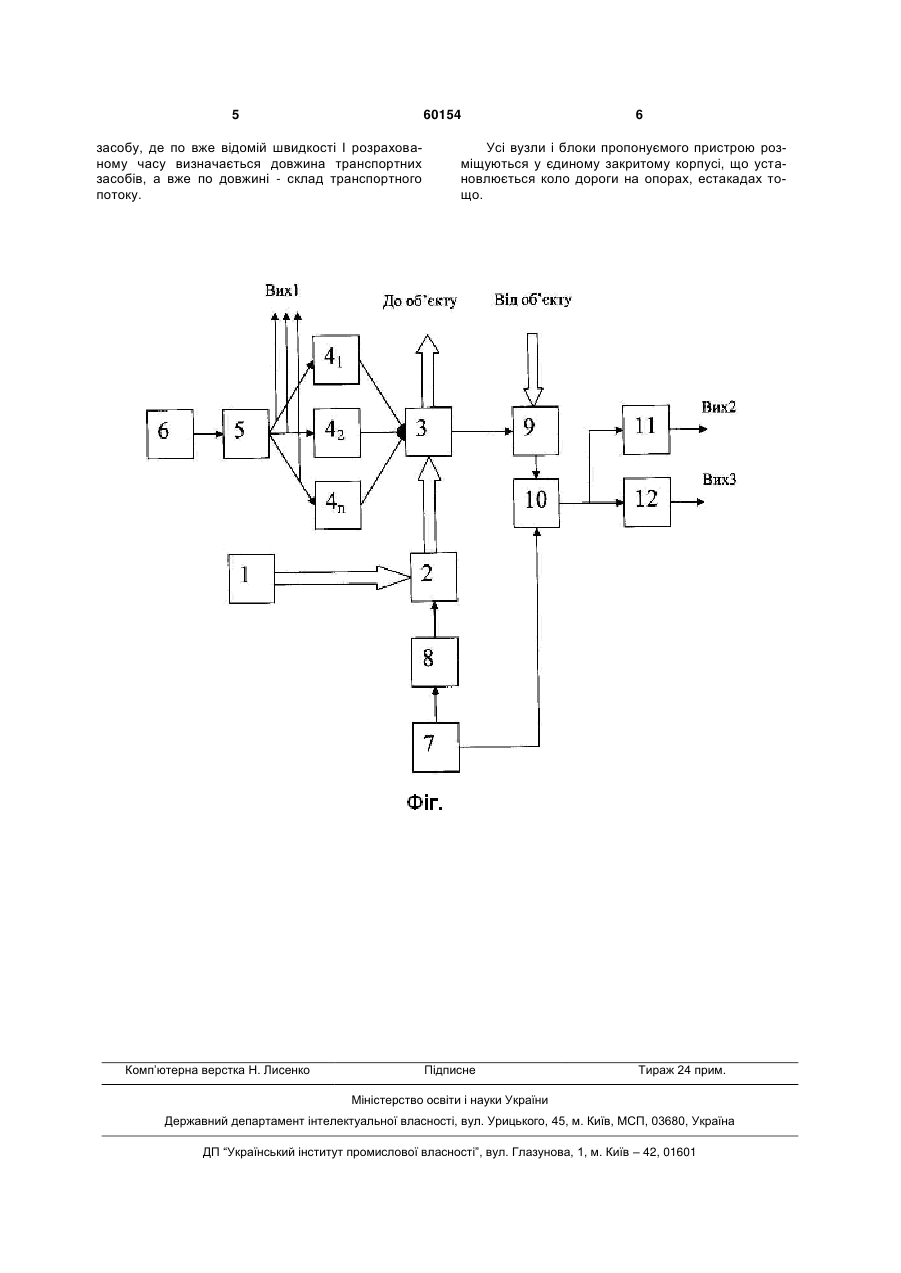
Пристрій для вимірювання параметрів транспортних потоків, що складається з датчика лазерного випромінювання інфрачервоного діапазону, оптичного модулятора, генератора розгортки, лічильника-дешифратора, підсилювачів, дискретного сканера, задавального генератора, елемента визначення частоти доплерівського зсуву сигналу, перетворювача частоти зсуву сигналу і фотоприймача, причому генератор розгортки через лічильник-дешифратор, що послідовно сполучений з 3 перевищує смугу змін доплерівської частоти сигналу. Тому у відомому пристрої потужність шуму темнових фотонів та інших флуктуаційних завад на декілька порядків більша, ніж могла би бути при фільтрації на більш низькій частоті. Але, якщо знизити частоту задавального генератору і, відповідно, смугу пропускання фільтру, то точність виміру швидкості зменшується вже за рахунок зниження діапазону доплерівської частоти. У зв'язку з цим присутні у аналогу частотний дискримінатор І резонансний підсилювач не виконують покладених на них функцій виміру доплерівської частоти. В основу корисної моделі поставлено задачу удосконалення пристрою для вимірювання параметрів транспортних потоків шляхом розширення кількості охоплених смуг руху транспортних засобів та підвищення надійності його роботи за рахунок синхронізації кутів повороту датчика лазерного випромінювання і фотоприймача, а також підвищення точності визначення параметрів транспортного потоку за рахунок зменшення смуги пропускання пристрою. Поставлена задача вирішується тим, що у відомий пристрій, що вміщує датчик лазерного випромінювання інфрачервоного діапазону, оптичний модулятор, генератор розгортки, лічильникдешифратор, підсилювачі, дискретний сканер, задавальний генератор, елемент визначення частоти доплерівського зсуву сигналу, перетворювач частоти зсуву сигналу і фотоприймач, причому генератор розгортки через лічильник-дешифратор, що послідовно сполучений з підсилювачами, підключений до дискретного сканера, задавальний генератор через резонансний підсилювач підключений до оптичного модулятора, датчик лазерного випромінювання оптично з'єднаний через оптичний модулятор з дискретним сканером, відповідно до корисної моделі, фотоприймач виконано з можливістю повороту синхронно з поворотом датчика лазерного випромінювання, елемент визначення частоти доплерівського зсуву сигналу виконано в вигляді двократного перетворювача частоти, перетворювач частоти зсуву сигналу виконано у вигляді вимірювача частоти, причому двократний перетворювач частоти підключений першим входом до виходу задавального генератора, а другим входом - до виходу фотоприймача, вихід двократного перетворювача частоти підключений до вимірювача частоти та високочастотного детектора. На Фіг. приведена структурна схема пристрою для вимірювання параметрів транспортних потоків, де 1 - датчик лазерного випромінювання інфрачервоного діапазону, 2 - оптичний модулятор, 3 - дискретний сканер, 41,42,...4n - підсилювачі, 5 лічильник-дешифратор, 6 - генератор розгортки, 7 - задавальний генератор , 8 - резонансний підсилювач, 9 - фотоприймач, 10 - двократний перетворювач частоти, 11 - вимірювач частоти та 12 високочастотний детектор. Генератор розгортки 6 через лічильник-дешифратор 5, який послідовно сполучений з підсилювачами 41,42,...4n, підключений до дискретного сканера 3; до першого входу двократного перетворювача частоти 10 підключений задавальний генератор 7, а до другого входу фотоприймач 9, вихід двократного перетворювача 60154 4 частоти 10 підключений до вимірювача частоти 11 та високочастотного детектора 12; задавальний генератор 7 через резонансний підсилювач 8 підключений до оптичного модулятора 2, датчик лазерного випромінювання 1 оптично сполучений через модулятор з дискретним сканером 3, а фотоприймач 9, конструктивно з'єднаний з дискретним сканером 3. Потік оптичного випромінювання виходить з датчика 1 лазерного випромінювання інфрачервоного діапазону у вигляді квазіпаралельного пучка, проходить через оптичний модулятор 2, де модулюється за гармонічним законом. Потім пучок проходить через дискретний сканер 3, на входи якого через підсилювачі 41,42,...4n , де n - кількість смуг руху транспортних засобів, подається комбінація напруг з лічильника-дешифратора 5, складена із імпульсів генератора 6 розгортки. Кожній комбінації керуючих напруг відповідає певне кутове положення модульованого пучка після сканера. При цьому синхронно з дискретним сканером 3 кожній комбінації керуючих напруг з підсилювачів 41,42,...4n відповідає те ж кутове положення фотоприймача 9, конструктивно з'єднаного і синхронно працюючого з дискретним сканером 3. Таким чином, передаюча частина, куди, крім перерахованих вузлів, входять також задавальний генератор 7 і резонансний підсилювач 8, формує на дорозі скануючу пляму випромінювання, яка періодично ряд за рядом оглядає усі смуги руху дороги. При цьому у блок обробки інформації поступає інформація про те, яка смуга дороги аналізується у даний момент часу (вих.1). Оптичний сигнал відбивається від об'єкту або покриття дороги і частина його поступає у фотоприймач 9, орієнтований як і оптичний сигнал після дискретного сканера на відповідну смугу дороги. Електричний сигнал з інформацією про доплерівську частоту з фотоприймача 9 подається на двократний перетворювач частоти 10, на другий вхід якого підводиться напруга з задавального генератора 7. При співпадінні частот на обох входах двократного перетворювача частоти 10 на його виході напруга буде рівна нулю (транспортний засіб відсутній). При розсогласуванні частот на входах двократного перетворювача частоти (транспортний засіб виявлений) діапазон частоти доплеру переноситься до більш низької частоти, де можлива фільтрація допплерівської частоти у смузі, що на декілька порядків менша частоти задавального генератора 7. Сигнал з виходу двократного перетворювача частоти 10 поступає на вимірювач частоти 11 і на високочастотний детектор 12. Вимірювач частоти 11 перетворює доплерівський частотний зсув, що характеризує швидкість транспортного засобу, у імпульсно-цифровий код для вводу у блок обробки інформації (вих.2). Після детектування (вих.3) імпульсний сигнал поступає у блок обробки інформації для визначеності інтенсивності транспортного потоку. Для визначення довжини транспортного засобу в блоці обробки інформації обчислюється час від моменту розузгодження частот до моменту збігу частот на виході двократного перетворювача частоти 10 по кожній смузі руху транспортного 5 60154 засобу, де по вже відомій швидкості І розрахованому часу визначається довжина транспортних засобів, а вже по довжині - склад транспортного потоку. Комп’ютерна верстка Н. Лиcенко 6 Усі вузли і блоки пропонуємого пристрою розміщуються у єдиному закритому корпусі, що установлюється коло дороги на опорах, естакадах тощо. Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for traffic measurement parameters
Автори англійськоюLevterov Andrii Ivanovych, Denysenko Oleh Ivanovych, Yaruta Anton Mykolaiovych
Назва патенту російськоюУстройство для измерения параметров транспортных потоков
Автори російськоюЛевтеров Андрей Иванович, Денисенко Олег Васильевич, Ярута Антон Николаевич
МПК / Мітки
МПК: G08G 1/09
Мітки: транспортних, параметрів, пристрій, вимірювання, потоків
Код посилання
<a href="https://ua.patents.su/3-60154-pristrijj-dlya-vimiryuvannya-parametriv-transportnikh-potokiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання параметрів транспортних потоків</a>
Пристрій для безконтактного вимірювання параметрів механічних коливань
Номер патенту: 35110
Опубліковано: 15.03.2001
Автор: Хлопов Григорій Іванович
МПК: G01N 22/00, G01H 9/00
Мітки: вимірювання, параметрів, безконтактного, механічних, коливань, пристрій
Формула / Реферат:
1. Пристрій для безконтактного вимірювання параметрів механічних коливань, який містить генератор НВЧ, передавальну та приймальну антени і аналого-цифровий перетворювач, вихід якого з'єднаний з входом, обчислювального пристрою, який відрізняється тим, що введені задавальний генератор, фазовий модулятор, міст НВЧ, перетворювач НВЧ. підсилювач, вимірювач рівня відбитого сигналу та індикатор, вихід генератора НВЧ і вихід приймальної антени...
Спосіб вимірювання параметрів потоків рідин і газів

Номер патенту: 76157
Опубліковано: 17.07.2006
Автори: Гайський Павло Вітальович, Гайскій Віталій Олександрович
МПК: G01P 5/10
Мітки: параметрів, спосіб, рідин, вимірювання, газів, потоків
Формула / Реферат:
Спосіб вимірювання параметрів потоків рідин і газів, що полягає в установці локально в потоку декількох ідентичних терморезисторних елементів з підігріванням - охолоджуванням керованими джерелами різної змінної потужності, що контролюються, вимірюванні опорів терморезисторних елементів у часі, який відрізняється тим, що використовують три терморезисторных елементи, визначають миттєві значення температури терморезисторних елементів і їх...
Пристрій для роздільного вимірювання параметрів нелінійних електричних двополюсників
Номер патенту: 49980
Опубліковано: 15.10.2002
Автори: Бурбело Михайло Йосипович, Кравчук Павло Леонідович, Левицький Сергій Михайлович
МПК: G01R 27/02, H03K 5/00
Мітки: роздільного, нелінійних, параметрів, вимірювання, пристрій, двополюсників, електричних
Формула / Реферат:
Пристрій для роздільного вимірювання параметрів нелінійних електричних двополюсників, що містить генератор синусоїдної напруги, перший вимірювальний перетворювач, який складається з операційного підсилювача із зразковим резистором в колі від'ємного зворотного зв'язку і вимірюваним двополюсником у вхідному колі, два вузли вибірки-зберігання, два аналого-цифрових перетворювачі одновібратор і два блоки індикації, причому вихід генератора...
Пристрій для вимірювання та контролю параметрів кодів в рейкових колах
Номер патенту: 69059
Опубліковано: 16.08.2004
Автори: Профатилов Володимир Іванович, Сердюк Тетяна Миколаївна
МПК: B61L 23/00
Мітки: параметрів, вимірювання, кодів, колах, контролю, пристрій, рейкових
Формула / Реферат:
Пристрій для вимірювання та контролю параметрів кодів в рейкових колах, що містить локомотивні приймальні котушки, які ввімкнуті послідовно-зустрічно, програмний таймер, вихід якого з'єднаний з першим входом аналого-цифрового перетворювача, який відрізняється тим, що в нього введено аналого-цифровий перетворювач, другий вхід якого з'єднаний з виходом підсилювача-обмежувача, вхід підсилювача-обмежувача з'єднаний з виходом подільника напруги,...
Пристрій для вимірювання механічних параметрів електромагнітного реле
Номер патенту: 7850
Опубліковано: 15.07.2005
Автори: Безрукавий Дмитро Анатолійович, Разгонов Адам Пантелійович, Бондаренко Борис Маврович, Андреєвських Олександр Вікторович
МПК: G01B 7/02, G05B 23/02
Мітки: параметрів, пристрій, вимірювання, механічних, реле, електромагнітного
Формула / Реферат:
Пристрій для вимірювання механічних параметрів електромагнітного реле, що містить джерело опорного живлення, з'єднаного з кнопкою пуску та обмоткою реле, випромінювач світлового потоку, фотоприймач, реєстратор моменту зупинки якоря, елементи пам'яті і блок зрівняння, який відрізняється тим, що елементи пам'яті, блок зрівняння функціонально виконані сумісно в системному блоці комп'ютера, до якого підключена звуко- та світлонепроникна чарунка,...
Попередній патент: Пристрій для оцінювання залишкового робочого ресурсу силового масляного трансформатора
Наступний патент: Циліндр для охолодження рулонного полотна при намотуванні
Випадковий патент: Спосіб корекції психосоматичних розладів у дітей