Спосіб та пристрій для вимірювання кутової швидкості
Номер патенту: 61044
Опубліковано: 15.10.2003
Автори: Леоненко Костянтин Миколайович, Мурзаханов Олександр Валентинович, Шервашидзе Володимир Варламович
Формула / Реферат
1. Спосіб для вимірювання кутової швидкості (![]() ), який полягає у тому, що подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для подачі напруги, необхідної для розкручування гіромотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють величину напруги при даному напрямку обертання ротора гіромотора (U+), подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для зміни черговості фаз, що призводить до реверса вектора кінетичного моменту ротора гіромотора, на виході датчика вимірюють напругу при даному реверсованому напрямку обертання ротора гіромотора (U-), який відрізняється тим, що подають керуючі сигнали на блок живлення гіроскопічного датчика кутової швидкості для розкручування гіромотора, та зміни черговості фаз для його реверса, контролюють час вимірювання напруги на виході датчика до та після реверса гіромотора, а також розраховують значення корисної (К) та/або похибкової (П) складових вихідного сигналу по формулах: К=(U+-U-)/2 та П=(U++U-)/2 за допомогою електронно-обчислювальної машини з мікропроцесором та інтегрованим аналого-цифровим перетворювачем.
), який полягає у тому, що подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для подачі напруги, необхідної для розкручування гіромотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють величину напруги при даному напрямку обертання ротора гіромотора (U+), подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для зміни черговості фаз, що призводить до реверса вектора кінетичного моменту ротора гіромотора, на виході датчика вимірюють напругу при даному реверсованому напрямку обертання ротора гіромотора (U-), який відрізняється тим, що подають керуючі сигнали на блок живлення гіроскопічного датчика кутової швидкості для розкручування гіромотора, та зміни черговості фаз для його реверса, контролюють час вимірювання напруги на виході датчика до та після реверса гіромотора, а також розраховують значення корисної (К) та/або похибкової (П) складових вихідного сигналу по формулах: К=(U+-U-)/2 та П=(U++U-)/2 за допомогою електронно-обчислювальної машини з мікропроцесором та інтегрованим аналого-цифровим перетворювачем.
2. Пристрій для реалізації способу для вимірювання кутової швидкості, що складається із блока живлення гіроскопічного датчика кутової швидкості та гіроскопічного датчика кутової швидкості з чутливим елементом із гіромотором, який відрізняється тим, що містить гіроскопічний датчик кутової швидкості, у якому чутливий елемент з гіромотором підвішений у корпусі за допомогою гнучкого підвісу таким чином, що вісь обертання гіромотора є направленою перпендекулярно до осі, по якій згинається підвіс, і паралельно до осі симетрії чутливого елемента, причому гіроскопічний датчик кутової швидкості з’єднаний з електронно-обчислювальною машиною, що містить мікропроцесор та інтегрований аналогово-цифровий перетворювач.
Текст
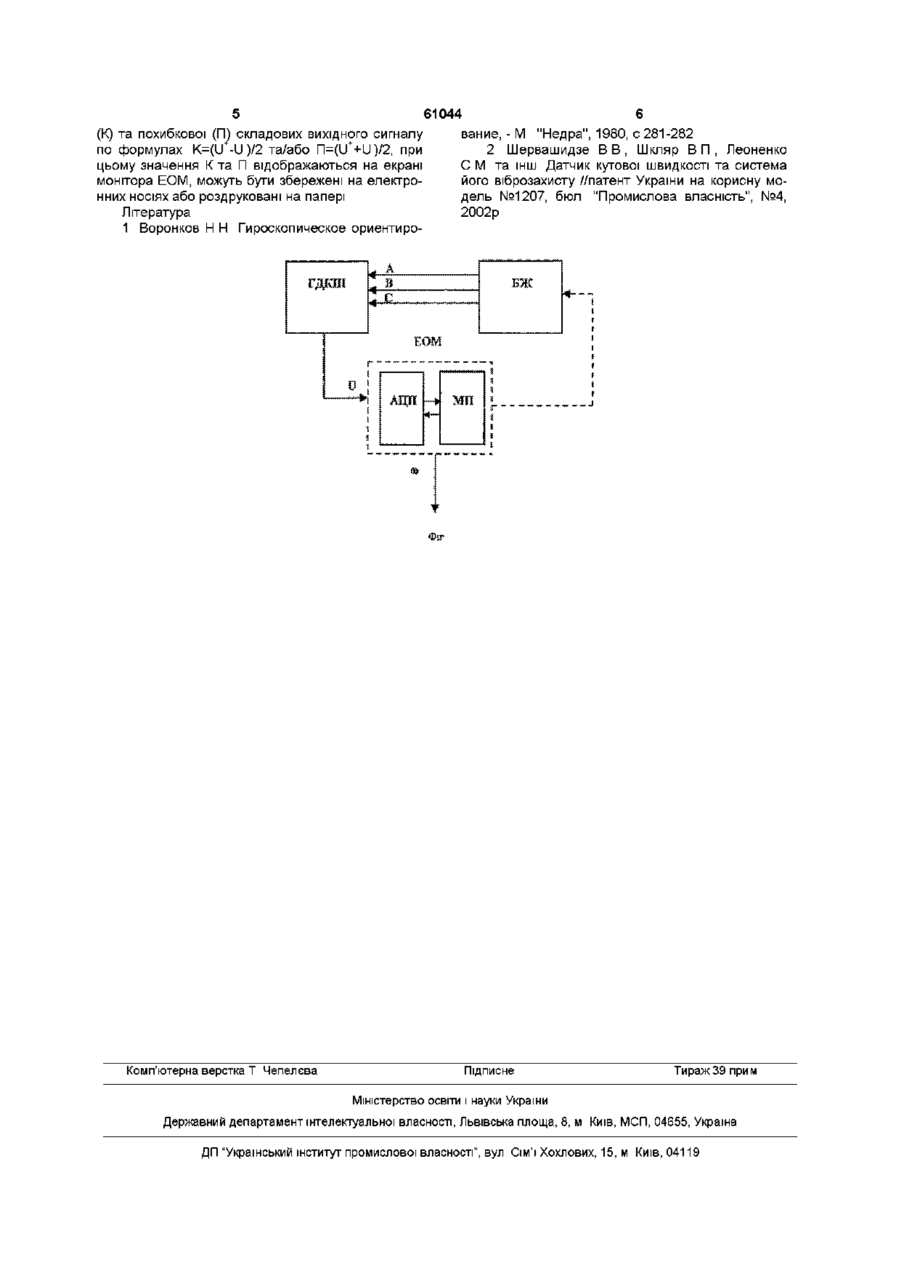
1 Спосіб для вимірювання кутової швидкості (со), який полягає у тому, що подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для подачі напруги, необхідної для розкручування промотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють величину напруги при даному напрямку обертання ротора промотора (U+), подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для зміни черговості фаз, що призводить до реверса вектора кінетичного моменту ротора промотора, на виході датчика вимірюють напругу при даному реверсованому напрямку обертання ротора промотора (U ), який відрізняється тим, що подають керуючі сигнали на блок живлення гіроскопічного датчика кутової швидкості для розкручування промотора, та зміни черговості фаз для його реверса, контролюють час вимірювання напруги на виході датчика до та після реверса промотора, а також розраховують значення корисної (К) та/або похибкової (П) + складових вихідного сигналу по формулах K=(U U )/2 та П=(ІІ + +ІІ)/2 за допомогою електроннообчислювальної машини з мікропроцесором та інтегрованим аналого-цифровим перетворювачем 2 Пристрій для реалізації способу для вимірювання кутової швидкості, що складається із блока живлення гіроскопічного датчика кутової швидкості та гіроскопічного датчика кутової швидкості з чутливим елементом із промотором, який відрізняється тим, що містить гіроскопічний датчик кутової швидкості, у якому чутливий елемент з промотором підвішений у корпусі за допомогою гнучкого підвісу таким чином, що вісь обертання промотора є направленою перпендекулярно до осі, по якій згинається ПІДВІС, І паралельно до осі симетрії чутливого елемента, причому гіроскопічний датчик кутової швидкості з'єднаний з електроннообчислювальною машиною, що містить мікропроцесор та інтегрований аналогово-цифровий перетворювач О Винахід стосується способу і пристрою для вимірюванні кутової швидкості (со) та відноситься до галузі приладобудування, зокрема до гіроскопічних датчиків кутової швидкості обертання об'єктів і може бути використаний в різноманітних інерційних приладах та системах для автономного орієнтування, навігації транспортних засобів, у об'єктах робототехніки, для топогеодезичного забезпечення будівництва тунелів, шахт, при укладці трубопроводів, бурінні свердловин, для оцінки стану гальмівних систем різноманітних транспортних засобів, залізничних колій, а також у інших сферах промисловості, в тому числі при роботі приладів та систем на основі ГДКШ в умовах з високим рівнем радіації, температури та навантажень тощо Загальновідомо, що при вимірюванні кутової швидкості за допомогою гіроскопічних датчиків кутової швидкості (ГДКШ), вихідний сигнал містить як корисну складову так і постійну та/або таку що змінюється у часі складову, що характеризує зсув нуля датчика кутової швидкості Ця величина зсуву нуля датчика кутової швидкості, вносить похибку під час вимірювань і у деяких випадках може сягати досить високих значень Саме тому при конструюванні систем на основі ГДКШ залишається актуальною задача виділення корисного сигналу при вимірюванні кутової швидкості Найближчим аналогом запропонованого винаходу є відомий з літератури [1] спосіб вимірювання кутової швидкості та пристрій для його реалізації, який складається із гіроскопічного датчика кутової швидкості, з'єднаного з слідкуючим рухливим корпусом (СРК), що має привод, блока живлення, датчика кута та індикатора (О 61044 У пристрої, що реалізує даний спосіб, викорис(U ), подають керуючий сигнал на блок живлення товується ГДКШ з'єднаний із слідкуючим рухливим ГДКШ для зміни черговості фаз, що призводить до корпусом та блоком живлення ГДКШ, наприклад, реверсу вектору кінетичного моменту ротора протакий, що описаний у [1], який, зокрема, складамотора, на виході датчика вимірюють напругу при ється з чутливого елемента із промотором, підвісу даному реверсованому напрямку обертання ротота датчика моменту ру промотору (U) При чому подають керуючі сигнали на блок живлення ГДКШ для розкручування Суть даного способу полягає утому, що після промотору, та зміни черговості фаз для його ревепопередньої орієнтації осі чутливості ГДКШ на зарсу, контролюють час вимірювання напруги до та даний напрямок та запуску промотора, датчик мопісля реверса промотора, а також розраховують менту виробляє сигнал пропорційний куту відхизначення корисної (К) та/або похибкової (П) склалення осі чутливості ГДКШ від попередньо + дових вихідного сигналу по формулах K=(U -U)/2 заданого напрямку За допомогою приводу розгор+ та П=(ІІ +ІІ)/2 за допомогою ЕОМ з мікропроцесотають слідкуючий рухливий корпус, з котрим пов'яром та інтегрованим аналогово-цифровим перезаний один з елементів датчика кута, до тих пір творювачем поки сигнал у ланцюгу зворотного зв'язку, що контролюється за допомогою індикатору, не буде доТакож запропонований пристрій для реалізації рівнювати нулю Після ЧОГО ПО шкалі привода виданого що складається із блока живлення ГДКШ та значають кутове положення приладу Для ГДКШ конструкції [2] в якому чутливий елемент з підвищення точності вимірювання здійснюють репромотором підвішений у корпусі за допомогою версування вектору кінетичного моменту гіроскогнучкого підвісу таким чином, що вісь обертання па Процес вимірювань повторюють у тій же самій промотору є направленою перпендикулярно до ПОСЛІДОВНОСТІ При цьому напівсума значень кутоосі, по якій згинається ПІДВІС, І паралельно до осі вих положень пристрою при прямому та реверсосиметрії чутливого елемента, причому ГДКШ з'єдваному векторі кінетичного моменту гіроскопу віднаний з ЕОМ, що містить мікропроцесор та інтегповідає більш точному значенню кутової рований аналогово-цифровим перетворювач ШВИДКОСТІ Технічним результатом запропонованих способу та пристрою є зменшення часу необхідного До основних недоліків даних способу та прина вимірювання кутової швидкості, збільшення строю можна віднести точності вимірювань, а також можливість викорисвідсутність у пристрої ЕОМ для управління тання запропонованого пристрою при створенні етапами вимірювання та розрахунку вихідних пабезплатформних навігаційних систем раметрів є причиною істотного зменшення точності та швидкості вимірювань, а значить і їх оперативНа фігурі зображена схема пристрою, що реаності, що призводить до збільшення вартості робіт лізує спосіб вимірюванні кутової швидкості (со) за у яких використовують ВІДПОВІДНИЙ спосіб та придопомогою ГДКШ і складається з електроннострій, обчислювальної машини (ЕОМ), яка містить мікропроцесор (МП) та інтегрований аналого-цифровий використання у складі пристрою слідкуючого перетворювач (АЦП), послідовно з'єднаної з блорухливого корпусу з'єднаного з ГДКШ збільшує час ком живлення гіроскопічного датчика кутової вимірювань, а також робить неможливим вклюшвидкості (БЖ) та гіроскопічним датчиком кутової чення описаного пристрою до деяких приладів, швидкості (ГДКШ) наприклад, інклінометрів, призначених для роботи в умовах з високим рівнем температур, радіації та Пристрій, що реалізує спосіб для виділення навантажень, що обумовлюється складною електкорисного сигналу при вимірюванні кутової швидромеханічною будовою СРК Крім того розміри кості за допомогою ГДКШ працює наступним числідкуючого рухливого корпусу не дозволяють вином користовувати описаний пристрій у приладах, що За допомогою ЕОМ з мікропроцесором та інтемають ВІДПОВІДНІ обмеження за габаритами грованим аналогово-цифровим перетворювачем З літератури [2] відомий ГДКШ в якому чутлиподають керуючий сигнал на блок живлення ГДКШ вий елемент з промотором підвішений у корпусі за для подачі напруги необхідної для розкручування допомогою гнучкого підвісу таким чином, що вісь промотору ГДКШ до його виходу на стаціонарний обертання промотору є направленою перпендикурежим обертання, знімають з ГДКШ величину налярно до осі, по якій згинається ПІДВІС, І паралельпруги, що є пропорційною вихідному сигналу, при но до осі симетрії чутливого елемента даному напрямку обертання ротору промотору (U+), подають керуючий сигнал на блок живлення Основною задачею запропонованого винаходу ГДКШ для зміни черговості фаз таким чином ревеє створення способу та пристрою для ефективнорсуючи вектор кінетичного моменту ротора го, оперативного, а також точного вимірювання промотора, знімають з ГДКШ величину напруги, кутової швидкості та широкого використання при що є пропорційною вихідному сигналу, при даному створення безплатформних навігаційних систем напрямку обертання ротору промотору (U) При Поставлена задача реалізується шляхом цьому, час вимірювання напруги до та після ревестворення способу вимірювання кутової швидкості рса ротора промотора (не враховуючи час самого (со) який полягає у тому, що подають керуючий реверса) повинен бути однаковим, що також контсигнал на блок живлення гіроскопічного датчика ролюється за допомогою ЕОМ з мікропроцесором кутової швидкості (ГДКШ) для подачі напруги нета інтегрованим аналогово-цифровим перетворюобхідної для розкручування промотору ГДКШ до вачем Після ЧОГО використовуючи ЕОМ з мікройого виходу на стаціонарний режим обертання, на процесором та інтегрованим аналогово-цифровим виході датчика вимірюють величину напруги при перетворювачем розраховують значення корисної даному напрямку обертання ротору промотору 61044 (К) та похибкової (П) складових вихідного сигналу вание, - М "Недра", 1980, с 281-282 + + по формулах K=(U -U)/2 та/або П=(11 +11)/2, при 2 Шервашидзе В В , Шкляр В П , Леоненко цьому значення К та П відображаються на екрані С М та інш Датчик кутової швидкості та система монітора ЕОМ, можуть бути збережені на електройого віброзахисту //патент України на корисну монних носіях або роздруковані на папері дель №1207, бюл "Промислова власність", №4, 2002р Література 1 Воронков Н Н Гироскопическое ориентиро Комп'ютерна верстка Т Чепелєва Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01P 9/00
Мітки: спосіб, кутової, швидкості, пристрій, вимірювання
Код посилання
<a href="https://ua.patents.su/3-61044-sposib-ta-pristrijj-dlya-vimiryuvannya-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для вимірювання кутової швидкості</a>
Пристрій для вимірювання кутової швидкості
Номер патенту: 55791
Опубліковано: 15.04.2003
Автори: Кухарчук Василь Васильович, Білинська Марина Йосипівна
МПК: G01P 3/36
Мітки: кутової, швидкості, пристрій, вимірювання
Формула / Реферат:
Пристрій для вимірювання кутової швидкості, що містить освітлювач, об'єктив, багатоелементний фотоприймальний пристрій, який відрізняється тим, що в нього введена багатогранна насадка на контрольований вал, виконана у вигляді правильного багатогранника, обчислювальний пристрій, при цьому освітлювач виконаний у вигляді імпульсного лазера, а багатоелементний фотоприймальний пристрій виконаний у вигляді матриці світлочутливих елементів, оптичний...
Пристрій для вимірювання кутової швидкості та прискорення
Номер патенту: 56722
Опубліковано: 15.05.2003
Автори: Білинська Марина Йосипівна, Білинський Йосип Йосипович, Кухарчук Василь Васильович
МПК: G01C 19/00, G01P 3/36
Мітки: прискорення, кутової, пристрій, швидкості, вимірювання
Формула / Реферат:
Пристрій для вимірювання кутової швидкості та кутового прискорення, який містить освітлювач, контрольований вал, об'єктив, оптично зв'язаний з входом багатоелементного фотоприймального пристрою, який відрізняється тим, що в нього введена насадка на контрольованому валу, виконана у вигляді Архімедової спіралі, оптично зв'язана з освітлювачем, що являє собою напівпровідниковий лазер, об'єктивом і обчислювальним пристроєм, вхід якого зв'язаний з...
Спосіб вимірювання кутової швидкості та пристрій для його здійснення
Номер патенту: 10840
Опубліковано: 25.12.1996
Автори: Жовнір Микола Федорович, Скрипник Вікторія Іосиповна, Довгополий Анатолій Степанович, Дубовенко Олександр Валентинович, Скрипник Юрій Олексійович
МПК: G01P 9/00
Мітки: вимірювання, спосіб, кутової, швидкості, здійснення, пристрій
Формула / Реферат:
1. Способ измерения угловой скорости, заключающийся в том, что в кольцевом волноводе, вращающемся с угловой скоростью Wх, возбуждают поверхностные акустические волны, преобразуют поверхностные акустические волны в электрический сигнал приемником, механически развязанным с кольцевым волноводом, и определяют угловую скорость по частоте сигнала на выходе приемника, отличающийся тем, что вначале направление распространения поверхностных...
Спосіб вимірювання кутової швидкості та пристрій для його здійснення
Номер патенту: 10897
Опубліковано: 25.12.1996
Автори: Довгополий Анатолій Степанович, Скрипник Юрій Олексійович, Ільєнко Анатолій Миколайович, Фадєєв Олексій Валерієвич
МПК: G01C 19/64
Мітки: вимірювання, швидкості, здійснення, кутової, спосіб, пристрій
Формула / Реферат:
(57) 1. Способ измерения угловой скорости, включающий разделение оптического монохроматического когерентного излучения на две волны, распространение их в катушке волоконного световода во встречных направлениях, сдвиг частоты одной из волн до ее вхождения в катушку волоконного световода, а частота другой волны - после прохождения ею катушки волоконного световода, совмещение встречно распространяющихся волн, образующих интерференционную...
Спосіб вимірювання кутової швидкості і пристрій для його здійснення
Номер патенту: 22597
Опубліковано: 17.03.1998
Автори: Ільєнко Анатолій Миколайович, Скрипник Юрій Олексійович
МПК: G01C 19/64
Мітки: здійснення, швидкості, пристрій, кутової, вимірювання, спосіб
Формула / Реферат:
1. Способ измерения угловой скорости, включающий разделение оптического излучения на две волны, распространяющиеся в катушке волоконного световода во встречных направлениях, сдвиг частоты одной из волн до ее вхождения в катушку волоконного световода, а частоту другой волны сдвигают на то же значение после прохождения ею катушки волоконного световода, совмещение встречно распространяющихся волн, образующих интерференционную картину,...
Попередній патент: Пристрій для зонної плавки
Наступний патент: Пристрій для контролювання наїзником часових характеристик ходу кінного екіпажа
Випадковий патент: Аміди 5-феноксиметил-1,3,4-оксадіазол-2-іл-тіоацетатної кислоти, які виявляють протисудомну активність