Спосіб позиціонування вузлів у бездротових сенсорних мережах
Номер патенту: 65765
Опубліковано: 12.12.2011
Автори: Зеленін Анатолій Миколайович, Іваненко Вікторія Олександрівна
Формула / Реферат
Спосіб позиціонування вузлів у бездротових сенсорних мережах, заснований на визначенні дальності між вузлами і базовими станціями, точні глобальні координати яких відомі, шляхом визначення величини загасання прийнятого пілот-сигналу, при відомому рівні переданого, який відрізняється тим, що при (n+1) базових станцій, де n - мінімально необхідна для позиціонування кількість базових станцій, кожна базова станція оснащена мотом - вузлом бездротової сенсорної мережі, однотипним використовуваним в сенсорній мережі, при цьому при широкомовній передачі пілот-сигналів з базових станцій визначається рівень прийнятого сигналу не тільки мотами мережі, але й додатковими мотами, встановленими на базових станціях, причому визначені за технологією RSSI відстані до інших базових станцій порівнюються з відомими глобальними і знаходяться поправочні коефіцієнти, на які помножуються отримані мотами мережі відстані відповідно до їх перебування у секторах мережі, які визначають околиці базової станції.
Текст
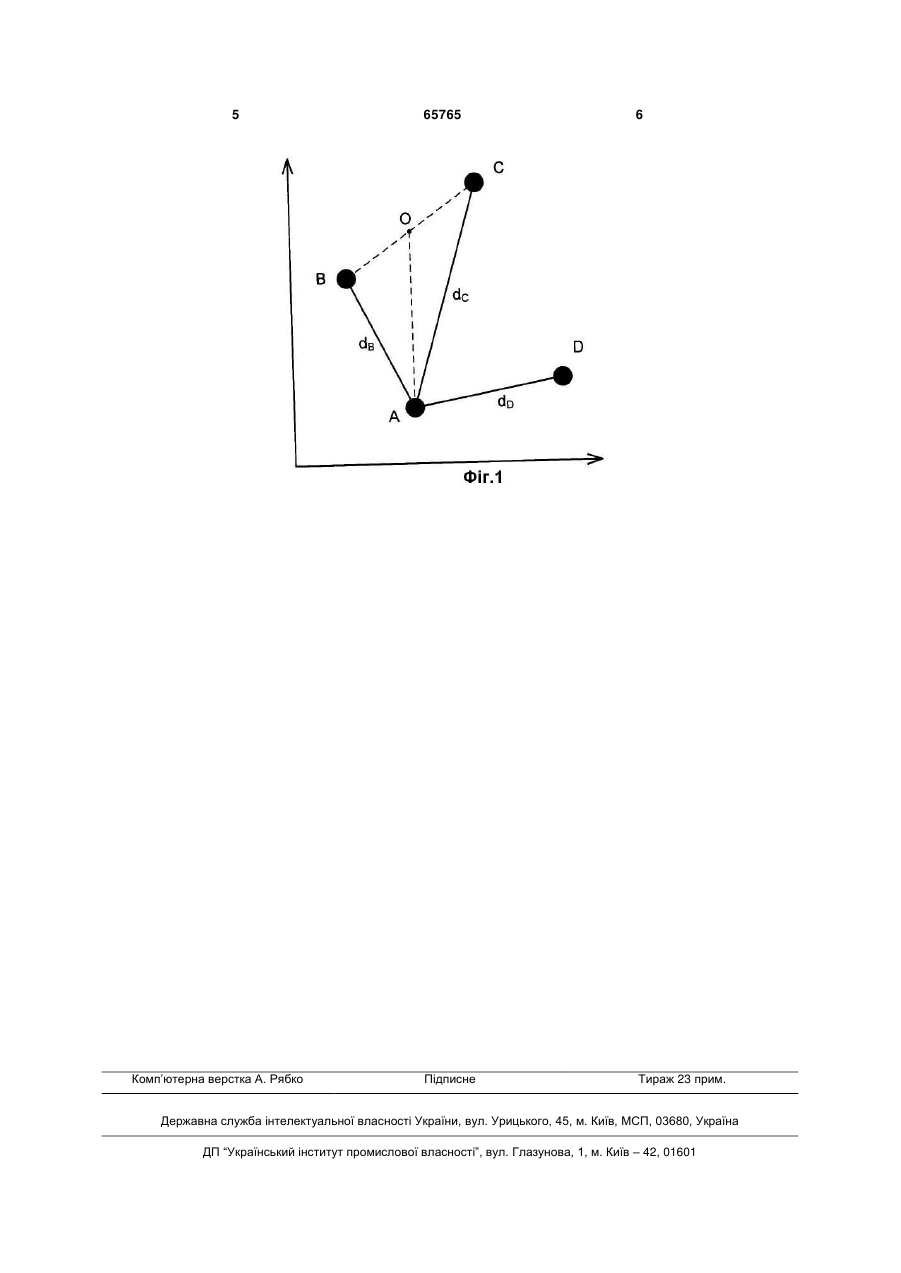
Спосіб позиціонування вузлів у бездротових сенсорних мережах, заснований на визначенні дальності між вузлами і базовими станціями, точні глобальні координати яких відомі, шляхом визначення величини загасання прийнятого пілотсигналу, при відомому рівні переданого, який відрізняється тим, що при (n+1) базових станцій, де 3 му розміщенні об'єктів невеликих габаритів, що характерно для БСМ. Підвищення точності позиціонування технології RSSI дозволить не ускладнювати апаратну і програмну частини мота, а, отже, і його вартість, що є критичним в БСМ виходячи з великої кількості вузлів. Технічною задачею пропонованого способу є підвищення точності визначення місця розташування вузлів бездротової сенсорної мережі. Ця задача вирішена наступним чином. У способі позиціонування вузлів у бездротових сенсорних мережах, що заснований на визначенні дальності між вузлами і базовими станціями (БС), точні глобальні координати яких відомі, шляхом визначення величини загасання прийнятого пілотсигналу, при відомому рівні переданого, згідно запропонованому технічному рішенню, при (n+1) БС, де n - мінімально необхідна для позиціонування кількість БС, кожна БС оснащена мотом - вузлом БСМ, однотипним використовуваним в сенсорній мережі, при цьому при широкомовній передачі пілот-сигналів з БС визначається рівень прийнятого сигналу не тільки мотами мережі, але й додатковими мотами, встановленими на БС, причому визначені за технологією RSSI відстані до інших БС порівнюються з відомими глобальними і знаходяться поправочні коефіцієнти, на які помножуються отримані мотами мережі відстані відповідно до їх перебуванням у секторах мережі, які визначають околиці БС. На Фіг.1 зображено орієнтовне розміщення БС - А, В, С і D, відстані між БС, що позиціонується А, та БС, що позиціонують - В, С і D та поділ мережі на сектори, які визначають околиці БС. В основу корисної моделі покладено метод підвищення точності позиціонування технології RSSI за рахунок застосування (n+1) БС (де n - мінімально необхідна кількість БС), в яких додатково встановлені моти, однотипні тим, що використовуються в мережі. Завдяки цьому істотно зменшується похибка внаслідок різнорідності характеристик приймачів. Аналогічно позиціонуванню мотів за технологією RSSI проводиться взаємне позиціонування БС: по черзі n БС у широкомовному режимі розсилають пілот-сигнали, а і-а БС приймає сигнали на встановлений у ній мот, який оцінює відстані до кожної БС по (2) (Фіг.1). Використання на БС, що позиціонується, додаткового мота, який аналогічний мотам мережі, виключає появу помилки (розбіжності у рівнях прийнятого пілот-сигналу) через відмінності характеристик приймачів мота і БС. Порівняння глобальних d (точних, від GPS) і локальних d Л (що визначаються за технологією 65765 4 RSSI) відстаней від n БС до і-ої дозволяє визначити коригуючий коефіцієнт для кожної БС: d k Л . (4) d Отриманий коефіцієнт (4) дозволяє компенсувати похибку визначення відстані від мота в напрямку до найближчої БС шляхом помноження отриманих мотами мережі відстаней в секторі мережі поблизу БС. Інформація про місцезнаходження мотів, що передають інформацію до БС А і В та знаходяться в секторі В АО (Фіг.1), коректується коригуючим d коефіцієнтом k Л , а до БС А і С у секторі d ОАС k C dЛC dC . Тобто моти, що визначили свої локальні координати за технологією RSSI (хi,уi) сортуються відповідно до нерівностей k для y ах + b , (5) k C для y ах + b де рівняння прямої АО у=ах+b є рішенням системи рівнянь: y O axO b , (6) y ax b xO, yO - глобальні координати точки О (у простому випадку - середина відрізка), xA, yA - глобальные координаты точки А. У зв'язку з тим, що передбачається, що всі особливості поширення радіохвиль у напрямку від і-ої БС до решти рівномірні у секторах, отриманих шляхом розбиття мережі на околиці БС, то доцільно коригування локальних координат мотів коригуючими коефіцієнтами, що розраховані для відповідного сектору. Аналогічно і для решти БС. Суть корисної моделі пояснюється тим, що локальне позиціонування кожної БС відносно інших БС за технологією RSSI за допомогою додаткових мотів, однотипних використовуваним в мережі, і порівняння з глобальним позиціонуванням від GPS дозволяє виявити і зменшити систематичну похибку розрахунку відстаней до БС, яка виникає внаслідок поширення радіохвиль в реальному фізичному середовищі, шляхом введення коригуючого коефіцієнта. Таким чином, автори досягли рішення поставленої технічної задачі шляхом створення способу позиціонування вузлів у бездротових сенсорних мережах. 5 Комп’ютерна верстка А. Рябко 65765 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for positioning nodes in wireless sensor network
Автори англійськоюZelenin Anatolii Mykolaiovych, Ivanenko Viktoria Oleksandrivna
Назва патенту російськоюСпособ позиционирования узлов в беспроводных сенсорных сетях
Автори російськоюЗеленин Анатолий Николаевич, Иваненко Виктория Александровна
МПК / Мітки
МПК: H04W 64/00
Мітки: позиціонування, мережах, сенсорних, бездротових, спосіб, вузлів
Код посилання
<a href="https://ua.patents.su/3-65765-sposib-pozicionuvannya-vuzliv-u-bezdrotovikh-sensornikh-merezhakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб позиціонування вузлів у бездротових сенсорних мережах</a>
Спосіб позиціонування абонентів в мережі gsm
Номер патенту: 52369
Опубліковано: 25.08.2010
Автори: Бибка Олександр Іванович, Зеленін Анатолій Миколайович, Дереєв Олександр В'ячеславович
МПК: H04B 7/02
Мітки: мережі, спосіб, абонентів, позиціонування
Формула / Реферат:
Спосіб позиціонування абонентів в мережі GSM, що включає радіолокаційну технологію вимірювань часу проходження радіосигналу від мобільної станції до найближчих трьох базових станцій, після чого розраховують відстань до відповідних базових станцій і радіусами, відповідними до розрахованих відстаней, проводять кола з центрами, які співпадають з базовими станціями, причому точка перетину цих кіл характеризує місцезнаходження абонента (мобільної...
Спосіб і пристрій для розв’язання проблем сліпого вузла у бездротових мережах
Номер патенту: 94368
Опубліковано: 26.04.2011
Автори: Нанда Санджив, Нандагопалан Саішанкар, Ванг Сяофей, Абрахам Сантош
Мітки: розв'язання, проблем, пристрій, спосіб, сліпого, бездротових, вузла, мережах
Формула / Реферат:
1. Спосіб бездротового зв'язку, який включає етапи:прийом пакета, що містить щонайменше один заголовок і інформацію незаголовка;декодування згаданого щонайменше одного заголовка з метою визначити, чи потрібно обробляти інформацію незаголовка;в якому прийом пакета відбувається на приймальному вузлі, і декодування згаданого щонайменше одного заголовка включає:визначення адресата пакета; іповернення до...
Спосіб і пристрій для вироблення нового ключа при передачі обслуговування в бездротових мережах
Номер патенту: 93791
Опубліковано: 10.03.2011
Автор: Вандервін Мікаела
МПК: H04W 12/04, H04L 12/22, H04W 92/10, H04Q 5/00
Мітки: спосіб, передачі, пристрій, мережах, бездротових, нового, ключа, вироблення, обслуговування
Формула / Реферат:
1. Спосіб, який діє в точці доступу, який включає етапи, на яких:приймають перший запит від термінала доступу на встановлення захищеного сеансу зв'язку через точку доступу;відправляють повідомлення із запитом ключа пристрою аутентифікації, де повідомлення із запитом ключа включає в себе локально отриманий ідентифікатор першої точки доступу і прийнятий ідентифікатор термінала доступу; іприймають перший головний сеансовий...
Пакетна синхронізація з відкладеним підтвердженням в бездротових мережах
Номер патенту: 84285
Опубліковано: 10.10.2008
Автор: Сумро Амджад
МПК: H04L 1/16
Мітки: відкладеним, мережах, синхронізація, бездротових, пакетна, підтвердженням
Формула / Реферат:
1. Спосіб передавання пакетів із першого пристрою (101), підключеного до бездротової локальної мережі (WLAN) (100), у другий пристрій (102), підключений до WLAN, який включає такі операції: передавання від першого пристрою у другий пристрій першого пакета (200), що містить вказівник (205) першої передачі, який вказує на те, що інтервал обслуговування повинен початися в певний момент часу; передавання з другого пристрою в перший пристрій...
Вимірювання та моніторинг якості обслуговування (qоs) у бездротових мережах із диференційованими послугами
Номер патенту: 92478
Опубліковано: 10.11.2010
Автори: Сумро Амджад, Чжон Чжунь
МПК: H04L 12/28
Мітки: обслуговування, диференційованими, мережах, бездротових, qоs, якості, вимірювання, послугами, моніторинг
Формула / Реферат:
1. Бездротова мережа (100), яка включає в себе множину бездротових станцій (102) та точку доступу (101), яка відрізняється тим, що точка доступу та/або щонайменше одна бездтротова станція має засіб моніторингу для вимірювання даних стосовно затримки, яка відповідає проміжку часу між потраплянням блока даних МАС-рівня у точку доступу до послуги на МАС-рівні та отриманням МАС-рівенем підтвердження завершення передавання від фізичного рівня,...
Попередній патент: Пристрій для генерування резонансноімпульсних депресійних коливань на привибійну ділянку нафтової свердловини
Наступний патент: Спосіб експрес-визначення змін фізико-хімічних властивостей мембран тромбоцитів у хворих з судинною патологією головного мозку
Випадковий патент: Препарат для обробки посівного матеріалу зернових культур