Спосіб збудження механічного руху і пристрій для його реалізації
Номер патенту: 75997
Опубліковано: 15.06.2006
Автори: Мацелевич Павло Михайлович, Малянов Микола Іванович, Боровський Євген Павлович
Формула / Реферат
1. Спосіб збудження механічного руху, який включає дію тиску текучого енергоносія на рухливий елемент, який відрізняється тим, що на рухливий елемент діють біжучою хвилею деформації, що створюють шляхом подачі текучого енергоносія під тиском у щонайменше одну еластичну робочу камеру, яка взаємодіє з рухливим елементом таким чином, що геометричним місцем прикладання діючого зусилля біжучої хвилі є криволінійна поверхня рухливого елемента.
2. Спосіб за п. 1, який відрізняється тим, що текучий енергоносій подають поперемінно в лінійну сукупність не пов'язаних гідравлічно між собою робочих камер, взаємодіючих з рухливим елементом, причому подачу і скидання тиску енергоносія в сусідніх камерах суміщають у часі.
3. Пристрій для здійснення способу за пп. 1 або 2, який містить статор з еластичними робочими камерами, рухливий елемент, встановлений на осі, жорстко пов'язаній з ротором, і канали підведення і зливу текучого енергоносія, який відрізняється тим, що на внутрішній поверхні статора розміщені щонайменше дві робочі камери, які виконані у вигляді замкнених еластичних панчох з нульовим початковим об'ємом, гідравлічно порізно з'єднаних із джерелом енергоносія і зливальною каналізацією, а рухливий елемент виконаний у вигляді ролика, який вільно обкочує зовнішню поверхню робочих камер.
4. Пристрій за п. 3, який відрізняється тим, що ротор містить щонайменше два ролики, при цьому кількість робочих камер дорівнює подвоєному числу роликів.
5. Пристрій за пп. 3 або 4, який відрізняється тим, що висота біжучої хвилі деформації робочих камер не перевищує радіуса ролика (-ів).
6. Пристрій за пп. 3 або 4, який відрізняється тим, що ролики притиснуті до робочих камер.
7. Пристрій за п. 3, який відрізняється тим, що сполучення сусідніх робочих камер виконано східчастим, при цьому сходини в плані перекривають одна одну, каналізація робочих камер виконана в сходинах, причому канал напору наступної робочої камери розташований поруч з каналом зливу попередньої, а лінійна подовжня міжцентрова відстань між зазначеними каналами вибирається за умови
![]() ,
,
де ![]() -радіус ролика.
-радіус ролика.
Текст
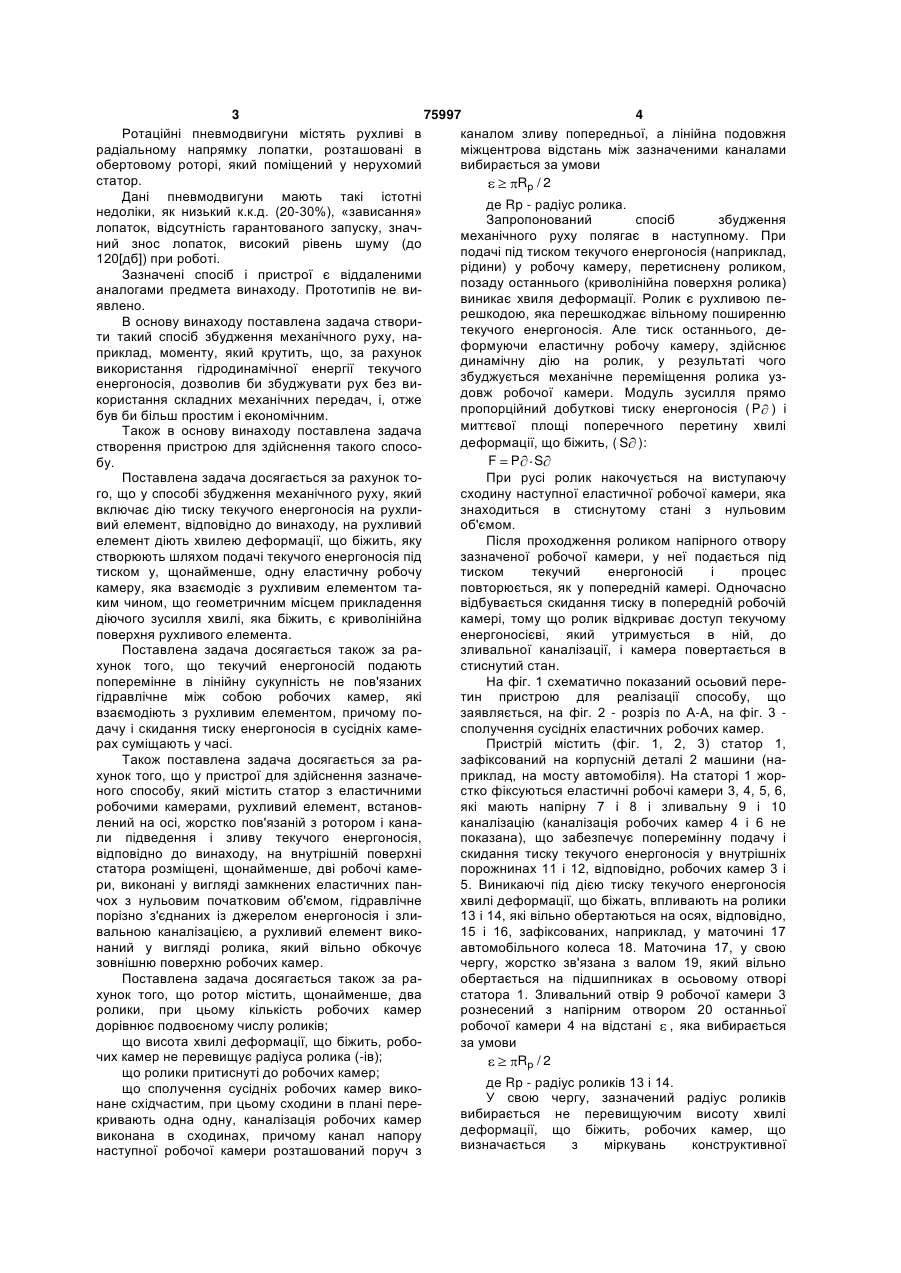
1. Спосіб збудження механічного руху, який включає дію тиску текучого енергоносія на рухливий елемент, який відрізняється тим, що на рухливий елемент діють біжучою хвилею деформації, що створюють шляхом подачі текучого енергоносія під тиском у щонайменше одну еластичну робочу камеру, яка взаємодіє з рухливим елементом таким чином, що геометричним місцем прикладання діючого зусилля біжучої хвилі є криволінійна поверхня рухливого елемента. 2. Спосіб за п. 1, який відрізняється тим, що текучий енергоносій подають поперемінно в лінійну сукупність не пов'язаних гідравлічно між собою робочих камер, взаємодіючих з рухливим елементом, причому подачу і скидання тиску енергоносія в сусідніх камерах суміщають у часі. 3. Пристрій для здійснення способу за пп. 1 або 2, який містить статор з еластичними робочими камерами, рухливий елемент, встановлений на осі, жорстко пов'язаній з ротором, і канали підведення C2 2 75997 1 3 75997 4 Ротаційні пневмодвигуни містять рухливі в каналом зливу попередньої, а лінійна подовжня радіальному напрямку лопатки, розташовані в міжцентрова відстань між зазначеними каналами обертовому роторі, який поміщений у нерухомий вибирається за умови статор. Rp / 2 Дані пневмодвигуни мають такі істотні де Rp - радіус ролика. недоліки, як низький к.к.д. (20-30%), «зависання» Запропонований спосіб збудження лопаток, відсутність гарантованого запуску, значмеханічного руху полягає в наступному. При ний знос лопаток, високий рівень шуму (до подачі під тиском текучого енергоносія (наприклад, 120[дб]) при роботі. рідини) у робочу камеру, перетиснену роликом, Зазначені спосіб і пристрої є віддаленими позаду останнього (криволінійна поверхня ролика) аналогами предмета винаходу. Прототипів не вивиникає хвиля деформації. Ролик є рухливою пеявлено. решкодою, яка перешкоджає вільному поширенню В основу винаходу поставлена задача створитекучого енергоносія. Але тиск останнього, дети такий спосіб збудження механічного руху, наформуючи еластичну робочу камеру, здійснює приклад, моменту, який крутить, що, за рахунок динамічну дію на ролик, у результаті чого використання гідродинамічної енергії текучого збуджується механічне переміщення ролика узенергоносія, дозволив би збуджувати рух без видовж робочої камери. Модуль зусилля прямо користання складних механічних передач, і, отже пропорційний добуткові тиску енергоносія ( P ) і був би більш простим і економічним. миттєвої площі поперечного перетину хвилі Також в основу винаходу поставлена задача деформації, що біжить, ( S ): створення пристрою для здійснення такого спосоF P S бу. Поставлена задача досягається за рахунок тоПри русі ролик накочується на виступаючу го, що у способі збудження механічного руху, який сходину наступної еластичної робочої камери, яка включає дію тиску текучого енергоносія на рухлизнаходиться в стиснутому стані з нульовим вий елемент, відповідно до винаходу, на рухливий об'ємом. елемент діють хвилею деформації, що біжить, яку Після проходження роликом напірного отвору створюють шляхом подачі текучого енергоносія під зазначеної робочої камери, у неї подається під тиском у, щонайменше, одну еластичну робочу тиском текучий енергоносій і процес камеру, яка взаємодіє з рухливим елементом таповторюється, як у попередній камері. Одночасно ким чином, що геометричним місцем прикладення відбувається скидання тиску в попередній робочій діючого зусилля хвилі, яка біжить, є криволінійна камері, тому що ролик відкриває доступ текучому поверхня рухливого елемента. енергоносієві, який утримується в ній, до зливальної каналізації, і камера повертається в Поставлена задача досягається також за рахунок того, що текучий енергоносій подають стиснутий стан. поперемінне в лінійну сукупність не пов'язаних На фіг. 1 схематично показаний осьовий перегідравлічне між собою робочих камер, які тин пристрою для реалізації способу, що взаємодіють з рухливим елементом, причому позаявляється, на фіг. 2 - розріз по А-А, на фіг. 3 дачу і скидання тиску енергоносія в сусідніх камесполучення сусідніх еластичних робочих камер. рах суміщають у часі. Пристрій містить (фіг. 1, 2, 3) статор 1, Також поставлена задача досягається за разафіксований на корпусній деталі 2 машини (нахунок того, що у пристрої для здійснення зазначеприклад, на мосту автомобіля). На статорі 1 жорного способу, який містить статор з еластичними стко фіксуються еластичні робочі камери 3, 4, 5, 6, робочими камерами, рухливий елемент, встановякі мають напірну 7 і 8 і зливальну 9 і 10 лений на осі, жорстко пов'язаній з ротором і канаканалізацію (каналізація робочих камер 4 і 6 не ли підведення і зливу текучого енергоносія, показана), що забезпечує поперемінну подачу і відповідно до винаходу, на внутрішній поверхні скидання тиску текучого енергоносія у внутрішніх статора розміщені, щонайменше, дві робочі камепорожнинах 11 і 12, відповідно, робочих камер 3 і ри, виконані у вигляді замкнених еластичних пан5. Виникаючі під дією тиску текучого енергоносія чох з нульовим початковим об'ємом, гідравлічне хвилі деформації, що біжать, впливають на ролики порізно з'єднаних із джерелом енергоносія і зли13 і 14, які вільно обертаються на осях, відповідно, вальною каналізацією, а рухливий елемент вико15 і 16, зафіксованих, наприклад, у маточині 17 наний у вигляді ролика, який вільно обкочує автомобільного колеса 18. Маточина 17, у свою зовнішню поверхню робочих камер. чергу, жорстко зв'язана з валом 19, який вільно Поставлена задача досягається також за раобертається на підшипниках в осьовому отворі хунок того, що ротор містить, щонайменше, два статора 1. Зливальний отвір 9 робочої камери 3 ролики, при цьому кількість робочих камер рознесений з напірним отвором 20 останньої дорівнює подвоєному числу роликів; робочої камери 4 на відстані , яка вибирається що висота хвилі деформації, що біжить, робоза умови чих камер не перевищує радіуса ролика (-ів); Rp / 2 що ролики притиснуті до робочих камер; де Rp - радіус роликів 13 і 14. що сполучення сусідніх робочих камер викоУ свою чергу, зазначений радіус роликів нане східчастим, при цьому сходини в плані перевибирається не перевищуючим висоту хвилі кривають одна одну, каналізація робочих камер деформації, що біжить, робочих камер, що виконана в сходинах, причому канал напору визначається з міркувань конструктивної наступної робочої камери розташований поруч з 5 75997 6 доцільності. Дійсно, якщо висота хвилі деформації 3-4 і 5-6, внутрішні порожнини камер 3 і 5 сполубуде більше радіуса ролика, то в цьому випадку чаються з каналізацією зливу 9 і 10. Тиск у камебуде мати місце марна витрата текучого рах 3 і 5 падає, останні стискаються, а тиск у каенергоносія. мерах 4 і 6 формує вже хвилі деформації, що Працює пристрій для реалізації способу збудбіжать, в камерах 4 і 6, тобто забезпечується безження механічного руху в такий спосіб. При подачі перервне обертання маточини 17 колеса 18. Далі тиску текучого енергоносія у внутрішні порожнини має місце скидання тиску текучого енергоносія в 11 і 12 еластичних робочих камер 3 і 5, хвилі робочих камерах 4 і 6 і знову подається тиск у кадеформації, що біжать, які виникають у зазначених мери 3 і 5 і т.д. камерах, чинять неврівноважений динамічний Запропоновані спосіб і пристрій дають вплив на ролики 13 і 14, викликаючи рух останніх можливість ліквідувати складні механічні передачі (напрямок руху зазначений стрілками на фіг. 2). для передачі моменту, що крутить, об'єктові руху. Ролики рухаються від каналів напору 7 і 8 до Зокрема, з'являється можливість створення вбуканалів зливу 10 і 9 робочих камер 3 і 5. У цей час дованого привода різних машин, що істотно тиск енергоносія в робочих камерах 4 і 6 відсутній і спрощує конструкцію і компонування машини в останні мають нульовий об'єм. Як тільки ролики цілому, знижує її вагу і металоємність, а також виявляються на місцях сполучення робочих камер зменшує собівартість. Комп’ютерна верстка М. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for excitation of mechanical motion and appliance for its realization
Автори англійськоюMatselevych Pavlo Mykhailovych
Назва патенту російськоюСпособ возбуждения механического движения и устройство для его реализации
Автори російськоюМацелевич Павел Михайлович
МПК / Мітки
МПК: F03C 5/00
Мітки: механічного, реалізації, спосіб, руху, збудження, пристрій
Код посилання
<a href="https://ua.patents.su/3-75997-sposib-zbudzhennya-mekhanichnogo-rukhu-i-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб збудження механічного руху і пристрій для його реалізації</a>
Спосіб форсування струму збудження синхронного двигуна та пристрій для його реалізації
Номер патенту: 60652
Опубліковано: 15.10.2003
Автори: Нізімов Родіон Вікторович, Сторожко Вадим Станіславович, Нізімов Віктор Борисович
Мітки: пристрій, струму, реалізації, двигуна, форсування, збудження, синхронного, спосіб
Формула / Реферат:
1. Спосіб форсування струму збудження синхронного двигуна, при якому регулюють струм обмотки збудження пропорційно обмірюваної електромагнітної потужності двигуна, контролюють струм і напругу статора і при перевищенні струмом наперед заданого значення або при короткочасному глибокому зниженні напруги в електромережі нижче допустимого рівня, знімають керуючі імпульси з мостового випрямляча, включають попередньо заряджений від незалежного...
Спосіб ультразвукового вимірювання параметрів руху і пристрій для його реалізації
Номер патенту: 67829
Опубліковано: 15.07.2004
Автори: Гірник Сергій Арнольдович, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, Волохов Володимир Олексійович
МПК: A61B 8/00
Мітки: руху, вимірювання, параметрів, реалізації, спосіб, ультразвукового, пристрій
Формула / Реферат:
1. Спосіб ультразвукового імпульсного вимірювання параметрів руху суцільних середовищ, який містить задання напрямку зондування досліджуваного середовища, періодичне випромінювання вздовж заданого напрямку зондування послідовності зондуючих ультразвукових хвильових імпульсів, прийом ультразвукових хвиль, відбитих від досліджуваного середовища, перетворення відбитих ультразвукових хвиль в електричний сигнал відгуку, його підсилення,...
Спосіб гальмування механічних систем і пристрій для його реалізації
Номер патенту: 74496
Опубліковано: 15.12.2005
Автори: Мацелевич Павло Михайлович, Малянов Микола Іванович, Боровський Євген Павлович
МПК: B60T 1/00
Мітки: механічних, спосіб, гальмування, систем, пристрій, реалізації
Формула / Реферат:
1. Спосіб гальмування механічних систем, який включає використання гідродинамічного опору робочої рідини, який відрізняється тим, що як гальмівний елемент використовують порожнисту еластичну стрічку, яка містить щонайменше дві гідравлічно сполучені між собою камери, робочу рідину подають щонайменше в одну з камер, збільшуючи її об'єм, і створюють рухому перешкоду у вигляді хвилі, що біжить перед рухомим елементом, жорстко зв'язаним з об'єктом...
Спосіб навантаження генераторів постійного струму незалежного збудження і пристрій для реалізації способу
Номер патенту: 49281
Опубліковано: 16.09.2002
Автори: Родькін Дмитро Йосипович, Бялобржеський Олексій Володимирович, Кривонос Сергій Анатолійович, Чорний Олексій Петрович, Величко Тетяна Володимирівна
МПК: G01R 31/24
Мітки: постійного, незалежного, навантаження, способу, струму, реалізації, збудження, генераторів, спосіб, пристрій
Формула / Реферат:
1. Спосіб навантаження генератора постійного струму незалежного збудження, який полягає в тому, що якір електричної машини підключають до керованого силового перетворювача через датчик струму якоря і датчик напруги, обмотку збудження підключають до збудника через датчик струму збудження і напруги збудження, контролюють параметри режиму навантаження, струм якоря, струм збудження, напругу якоря, напругу збудження, швидкість обертання, який...
Спосіб одержання характеристик генераторів постійного струму незалежного збудження і пристрій для реалізації способу
Номер патенту: 62493
Опубліковано: 15.12.2003
Автори: Родькін Дмитро Йосипович, Ломонос Андрій Іванович, Бялобржеський Олексій Володимирович, Величко Тетяна Володимирівна, Кривонос Сергій Анатолійович
МПК: G01R 31/24, G01R 31/00
Мітки: незалежного, одержання, струму, генераторів, реалізації, пристрій, збудження, характеристик, спосіб, постійного, способу
Формула / Реферат:
1. Спосіб одержання характеристик генератора постійного струму незалежного збудження, за яким якір електричної машини підключають до керованого силового перетворювача через датчик струму якоря і датчик напруги, обмотка збудження підключається до збудника через датчик струму збудження, і контролюються параметри режиму, струм якоря, струм збудження, напруга якоря, швидкість обертання, який відрізняється тим, що задають закони зміни напруги...
Попередній патент: Спосіб керування огрудкуванням шихти
Наступний патент: Гідробурова головка
Випадковий патент: Рухомий стіл гідравлічного преса