Лазерний висок
Формула / Реферат
Лазерний висок, що містить корпус, установлений на порожнистій осі обертання, лазер з оптичним колімуючим об'єктивом, розташований в основі корпусу, компенсаційний блок, установлений по ходу проходження променя, який виконаний у вигляді підвіски, несучої чутливий елемент, який відрізняється тим, що нижня база підвіски виконана у вигляді підвішеної на схрещених нитках платформи, на нижній і верхній площині якої встановлені лазерні діоди з оптичними колімуючими випромінювання об'єктивами, осі випромінювання лазерів установлені перпендикулярно один до одного і мають горизонтальний, вертикальний і стрімкий напрямок, а сам лазерний висок приводиться в обертальний рух за допомогою електроприводу, що керується, наприклад, програмуючим таймером.
Текст
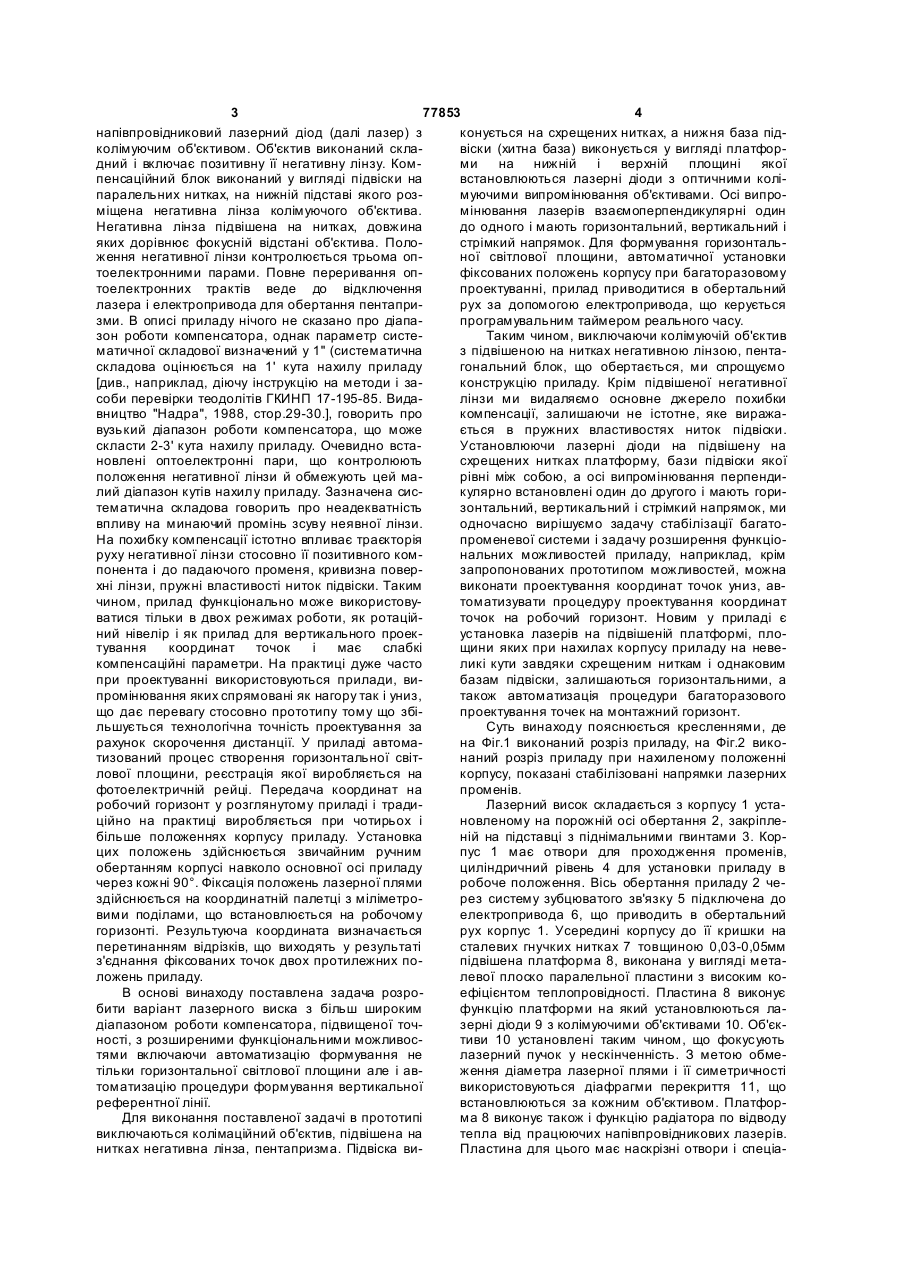
Лазерний висок, що містить корпус, установлений на порожнистій осі обертання, лазер з опти 3 77853 4 напівпровідниковий лазерний діод (далі лазер) з конується на схрещених нитках, а нижня база підколімуючим об'єктивом. Об'єктив виконаний склавіски (хитна база) виконується у вигляді платфордний і включає позитивну її негативну лінзу. Комми на нижній і верхній площині якої пенсаційний блок виконаний у вигляді підвіски на встановлюються лазерні діоди з оптичними коліпаралельних нитках, на нижній підставі якого розмуючими випромінювання об'єктивами. Осі випроміщена негативна лінза колімуючого об'єктива. мінювання лазерів взаємоперпендикулярні один Негативна лінза підвішена на нитках, довжина до одного і мають горизонтальний, вертикальний і яких дорівнює фокусній відстані об'єктива. Полострімкий напрямок. Для формування горизонтальження негативної лінзи контролюється трьома опної світлової площини, автоматичної установки тоелектронними парами. Повне переривання опфіксованих положень корпусу при багаторазовому тоелектронних трактів веде до відключення проектуванні, прилад приводитися в обертальний лазера і електропривода для обертання пентаприрух за допомогою електропривода, що керується зми. В описі приладу нічого не сказано про діапапрограмувальним таймером реального часу. зон роботи компенсатора, однак параметр систеТаким чином, виключаючи колімуючій об'єктив матичної складової визначений у 1" (систематична з підвішеною на нитках негативною лінзою, пентаскладова оцінюється на 1' кута нахилу приладу гональний блок, що обертається, ми спрощуємо [див., наприклад, діючу інструкцію на методи і законструкцію приладу. Крім підвішеної негативної соби перевірки теодолітів ГКИНП 17-195-85. Видалінзи ми видаляємо основне джерело похибки вництво "Надра", 1988, стор.29-30.], говорить про компенсації, залишаючи не істотне, яке виражавузький діапазон роботи компенсатора, що може ється в пружних властивостях ниток підвіски. скласти 2-3' кута нахилу приладу. Очевидно встаУстановлюючи лазерні діоди на підвішену на новлені оптоелектронні пари, що контролюють схрещених нитках платформу, бази підвіски якої положення негативної лінзи й обмежують цей марівні між собою, а осі випромінювання перпендилий діапазон кутів нахилу приладу. Зазначена сискулярно встановлені один до другого і мають горитематична складова говорить про неадекватність зонтальний, вертикальний і стрімкий напрямок, ми впливу на минаючий промінь зсуву неявної лінзи. одночасно вирішуємо задачу стабілізації багатоНа похибку компенсації істотно впливає траєкторія променевої системи і задачу розширення функціоруху негативної лінзи стосовно її позитивного комнальних можливостей приладу, наприклад, крім понента і до падаючого променя, кривизна поверзапропонованих прототипом можливостей, можна хні лінзи, пружні властивості ниток підвіски. Таким виконати проектування координат точок униз, авчином, прилад функціонально може використовутоматизувати процедуру проектування координат ватися тільки в двох режимах роботи, як ротаційточок на робочий горизонт. Новим у приладі є ний нівелір і як прилад для вертикального проекустановка лазерів на підвішеній платформі, плотування координат точок і має слабкі щини яких при нахилах корпусу приладу на невекомпенсаційні параметри. На практиці дуже часто ликі кути завдяки схрещеним ниткам і однаковим при проектуванні використовуються прилади, вибазам підвіски, залишаються горизонтальними, а промінювання яких спрямовані як нагору так і униз, також автоматизація процедури багаторазового що дає перевагу стосовно прототипу тому що збіпроектування точек на монтажний горизонт. льшується технологічна точність проектування за Суть винаходу пояснюється кресленнями, де рахунок скорочення дистанції. У приладі автомана Фіг.1 виконаний розріз приладу, на Фіг.2 викотизований процес створення горизонтальної світнаний розріз приладу при нахиленому положенні лової площини, реєстрація якої виробляється на корпусу, показані стабілізовані напрямки лазерних фотоелектричній рейці. Передача координат на променів. робочий горизонт у розглянутому приладі і традиЛазерний висок складається з корпусу 1 устаційно на практиці виробляється при чотирьох і новленому на порожній осі обертання 2, закріплебільше положеннях корпусу приладу. Установка ній на підставці з піднімальними гвинтами 3. Корцих положень здійснюється звичайним ручним пус 1 має отвори для проходження променів, обертанням корпусі навколо основної осі приладу циліндричний рівень 4 для установки приладу в через кожні 90°. Фіксація положень лазерної плями робоче положення. Вісь обертання приладу 2 чездійснюється на координатній палетці з міліметрорез систему зубцюватого зв'язку 5 підключена до вими поділами, що встановлюється на робочому електропривода 6, що приводить в обертальний горизонті. Результуюча координата визначається рух корпус 1. Усередині корпусу до її кришки на перетинанням відрізків, що виходять у результаті сталевих гнучких нитках 7 товщиною 0,03-0,05мм з'єднання фіксованих точок двох протилежних попідвішена платформа 8, виконана у вигляді металожень приладу. левої плоско паралельної пластини з високим коВ основі винаходу поставлена задача розроефіцієнтом теплопровідності. Пластина 8 виконує бити варіант лазерного виска з більш широким функцію платформи на який установлюються ладіапазоном роботи компенсатора, підвищеної точзерні діоди 9 з колімуючими об'єктивами 10. Об'єкності, з розширеними функціональними можливостиви 10 установлені таким чином, що фокусують тями включаючи автоматизацію формування не лазерний пучок у нескінченність. З метою обметільки горизонтальної світлової площини але і авження діаметра лазерної плями і її симетричності томатизацію процедури формування вертикальної використовуються діафрагми перекриття 11, що референтної лінії. встановлюються за кожним об'єктивом. ПлатфорДля виконання поставленої задачі в прототипі ма 8 виконує також і функцію радіатора по відводу виключаються колімаційний об'єктив, підвішена на тепла від працюючих напівпровідникових лазерів. нитках негативна лінза, пентапризма. Підвіска виПластина для цього має наскрізні отвори і спеціа 5 77853 6 льні камери, заповнені рідким охолоджувачем. го корпусу приводиться в робоче положення. Точки кріплення ниток підвісу 7 установлені на Включається необхідний для роботи лазерний спеціальних гвинта х 12 що дозволяють горизонтуканал (випромінюванням нагору, випромінюванвати платформу 8 відповідно напрямку випроміням униз, випромінюванням в горизонт). За допонювання встановлених лазерів 9. Самі лазерні могою таймера 14 програмуються тимчасові устадіоди мають самостійні елементи коректування вки (tоберт., tз упин.), запускається електропривід 6, що положення свого корпусу. Для виключення розвовідпрацьовує програму, встановлену оператором. роту платформи 8 при обертальному русі в корпусі Наприклад для проектування координат нагору приладу встановлені упори 13. Усі вихідні отвори в оператором виставляються тимчасові уставки, що корпусі 1 прикриті плоскопаралельними захисними зупиняють обертовий корпус приладу через кожні стеклами 14. Керування електроприводом 6 може 90°, (чи 45°) на визначений період часу tз упин.. Сам здійснюватися універсальним мікропроцесорним оператор піднімається на робочий горизонт і фікпрограмувальним таймером 15, наприклад універсує 4 чи 8 положень лазерної плями на координасальним таймером реального часу УТ-1 виробнитній палетці, потім фіксовані положення геометричого об'єднання "ОВЕН" чи TS-ED1 польського чно осереднюються і остаточно визначається виробництва. Один і інший мають енергонезалежточка передачі координат на робочий горизонт. ну пам'ять для збереження складеної програми Процедура компенсації невеликих нахилів прилаобертання електропривода 6. Мінімальний діападу ε=±20', наприклад у результаті коливань, чи зон уставки за часом складає від 0.1с і більше. Як вібрацій, грубо встановленого в робоче положення електропривід може бути використаний ДСОР32приладу, автоматично виключаються підвіскою на 2УХЛ4 - електропривід з редуктором, напругою схрещених нитках 7, що у результаті нахилу при220В-50Гц. Електроживлення лазерів, електроладу в одну сторону нахиляє платформу 8 на той привода, таймера може здійснюватися від акумуже кут у протилежну сторону, зберігаючи її площиляторної батареї 16 чи від зовнішньої мережі. Пони в первісному положенні, а якщо це положення дача живлення лазерів виконується через сталеві первісно було сгоризонтовано, то вона збереже нитки підвісу платформи 7. цей стан, а разом з нею вертикально і горизонтаЛазерний висок працює такий чином. Корпус 1 льно встановлені осі випромінювання лазерів. приладу за допомогою рівня 4 і обертанням само Комп’ютерна в ерстка Т. Чепелев а Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLaser plumb
Автори англійськоюSafarian Valerii Amaiakovych
Назва патенту російськоюЛазерный отвес
Автори російськоюСафарян Валерий Амаякович
МПК / Мітки
МПК: G01C 9/00
Код посилання
<a href="https://ua.patents.su/3-77853-lazernijj-visok.html" target="_blank" rel="follow" title="База патентів України">Лазерний висок</a>
Лазерний висок
Номер патенту: 11188
Опубліковано: 15.12.2005
Автор: Сафарян Валерій Амаякович
МПК: G01C 9/00
Формула / Реферат:
1. Лазерний висок, що містить корпус з рівнем, встановлений на порожнистій осі обертання і закріплений у підставці з піднімальними гвинтами, лазер з блоком живлення й оптичним колімуючим об'єктивом, блок стабілізації положення променя і призми, встановлені по ходу проходження променя і відхиляючі його у вертикальному напрямку, який відрізняється тим, що сам лазер разом з об'єктивом і блоком живлення підвішений до корпуса приладу за допомогою...
Оптичний висок
Номер патенту: 9968
Опубліковано: 17.10.2005
Автор: Сафарян Валерій Амаякович
МПК: G01C 9/00
Формула / Реферат:
1. Оптичний висок, що містить корпус з рівнем, установлений на порожнистій осі обертання і закріплений у підставці з піднімальними гвинтами, оптичну систему візування, в якій об'єктив виконаний з негативної і позитивної лінзи, перша жорстко закріплена в корпусі приладу, а інша підвішена на карданному підвісі чи нитках, який відрізняється тим, що оптична система візування виконана двоканальною і може бути переключена поворотом пентапризми на...
Лазерний аналізатор газового середовища
Номер патенту: 52972
Опубліковано: 15.01.2003
Автори: Теленкова Оксана Григорівна, Гамалій Володимир Федорович, Якорева Марія Володимирівна
МПК: G01N 21/25
Мітки: аналізатор, лазерний, газового, середовища
Формула / Реферат:
1. Лазерний аналізатор газового середовища, який містить пристрій управління, лазер накачки, активне середовище, кювету з досліджуваною речовиною, спектральний пристрій, фоточутливий прилад, який відрізняється тим, що як активне середовище використовують кристал Al2O3+Ti+3, як реєстратор спектрів та обробки результатів застосована електронна схема з можливістю керування персональним комп'ютером.2. Лазерний газоаналізатор по п. 1, який...
Лазерний скануючий пристрій змінної потужності

Номер патенту: 13734
Опубліковано: 17.04.2006
Автор: Шевченко Віктор Леонідович
МПК: A61N 5/00
Мітки: змінної, пристрій, скануючий, лазерний, потужності
Формула / Реферат:
1. Лазерний скануючий пристрій змінної потужності, що містить лазер, оптичну систему формування паралельного пучка, електронний затвор, поворотне дзеркало, вузол юстирування, дефлектор, світловод, ендосканер, блок вимірювальних приладів, персональний комп'ютер, який відрізняється тим, що на шляху лазерних променів під кутом, що не дорівнює 90 град., встановлені один або декілька дзеркальних екранів.2. Лазерний пристрій за п. 1,...
Лазерний пристрій для транспупілярної термотерапії
Номер патенту: 55335
Опубліковано: 17.03.2003
Автори: Риков Сергій Олександрович, Пасєчнікова Наталія Володимирівна, Король Андрій Ростиславович, Науменко Володимир Олександрович, Гаєвська Надія Сергіївна
МПК: A61F 9/007
Мітки: транспупілярної, лазерний, термотерапії, пристрій
Формула / Реферат:
Лазерний пристрій для транспупілярної термотерапії, що складається з блока живлення та керування, а також встановлених на спільній основі генератора лазерного випромінювання, офтальмологічного мікроскопа та щілинного освітлювача, при цьому виходи генератора лазерного випромінювання та щілинного освітлювача через напівпрозорі призми оптично зв'язані з об'єктивом офтальмологічного мікроскопа, який відрізняється тим, що на відстані
Попередній патент: Спосіб захисту людини від ураження електричним струмом в мережах з ізольованою нейтраллю
Наступний патент: Лікувально-ортопедична устілка
Випадковий патент: Спосіб одержання германату вісмуту