Введення лікарських засобів з вимірюванням тиску і переривчастим потоком для ідентифікації наповнених текучим середовищем анатомічних просторів і для забезпечення в них ін’єкції



















Формула / Реферат
1. Апарат для введення текучого середовища в наповнений текучим середовищем анатомічний простір, виконаний з можливістю приймання текучого середовища при тиску, який менше тиску тканин, що оточують анатомічний простір, який містить:
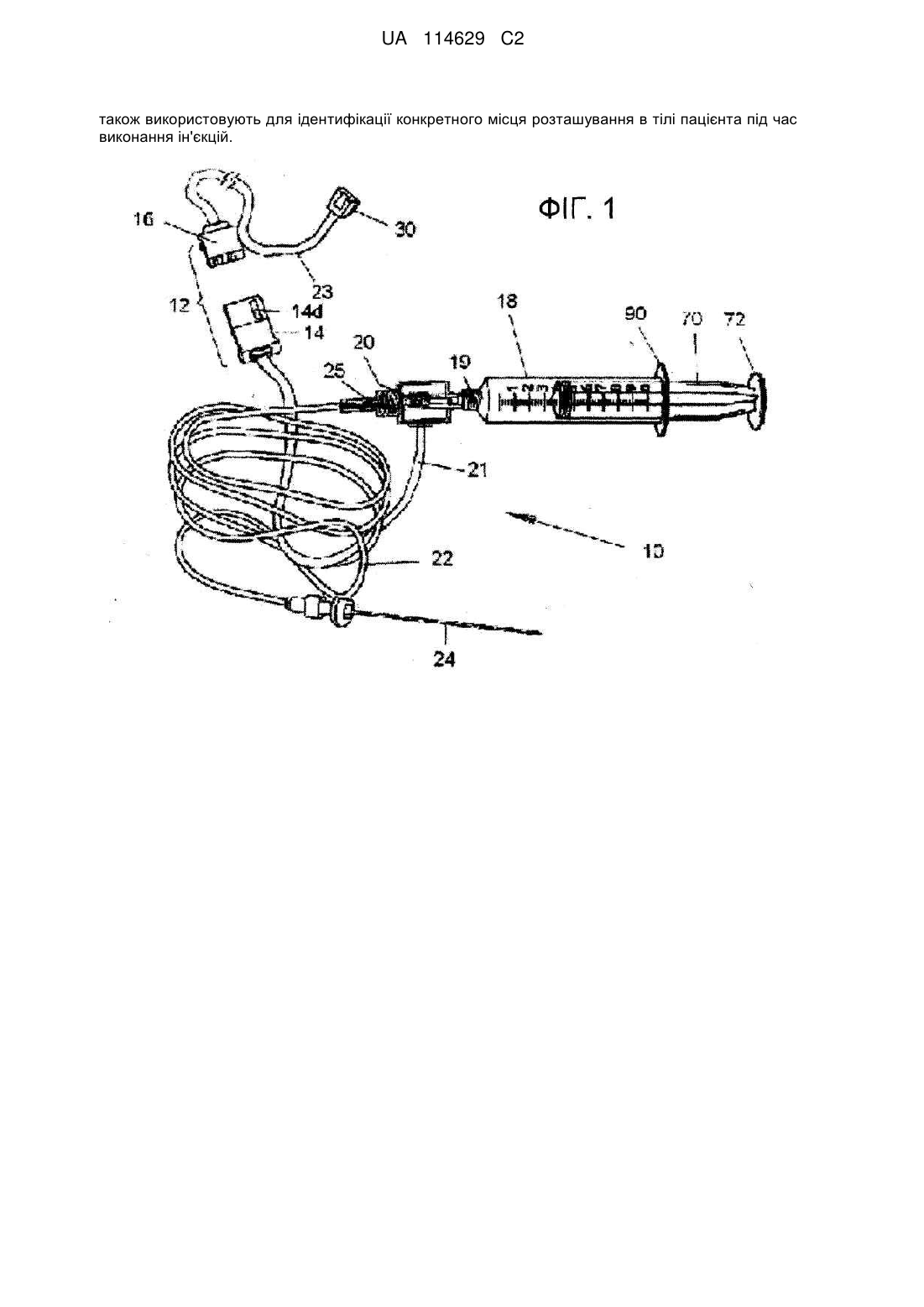
- вузол одноразових елементів, що містить: шприц, що має основну частину для розміщення текучого середовища, призначений для введення шляхом ін'єкції в анатомічний простір і що містить поршень, виконаний з можливістю переміщення в одному кінці основної частини для дозованої подачі текучого середовища з протилежного кінця основної частини, трубки, які нерознімно з'єднані з протилежним кінцем основної частини, голку, з'єднану з трубками, яка має кінчик, виконаний з можливістю введення у пацієнта та з можливістю переміщення через тканини, що оточують анатомічний простір, для пошуку цього анатомічного простору, та вбудований у лінію датчик тиску для створення сигналу, що відповідає миттєвому значенню тиску на кінчику голки,
- привідний блок, механічно з'єднаний зі шприцом й електрично з'єднаний з датчиком тиску, причому привідний блок містить керуючий пристрій з комп'ютером, запам'ятовувальний пристрій для зберігання першого вибраного тиску (Р1), який вибрано таким чином, що він відповідає ін'єкції текучого середовища в наповнений текучим середовищем анатомічний простір, і другого вибраного тиску (Р2), який нижче, ніж перший вибраний тиск (Р1) на першу вибрану величину, двигун, з'єднаний з комп'ютером і керований ним, і арматуру шприца, з'єднану з двигуном і механічно з'єднану зі шприцом для переміщення поршня в основну частину та з неї відповідно для ін'єкції й аспірації текучого середовища на кінчику голки із забезпеченням ін'єкції текучого середовища у пацієнта й аспірації текучого середовища з пацієнта, і
- комп'ютер запрограмований з можливістю керування двигуном для переміщення поршня із забезпеченням переривчастого потоку текучого середовища у пацієнта доти, поки перший вибраний тиск (Р1) не буде зареєстровано датчиком тиску, після чого двигун припиняє роботу для зупинки потоку додаткового текучого середовища у пацієнта доти, поки миттєве значення тиску на кінчику голки не зменшиться до значення, яке менше першого вибраного тиску, після чого програма відновлює роботу двигуна для поновлення потоку текучого середовища у пацієнта, так що у міру переміщення голки у тканинах пацієнта, оточуючих наповнений текучим середовищем анатомічний простір, потік текучого середовища в тканині припиняється при миттєвих значеннях тиску, що перевищують перший вибраний тиск (Р1), і відновлюється, коли миттєве значення тиску зменшується до значення другого вибраного тиску (Р2), для наступного поновлення ін'єкції текучого середовища в зазначений анатомічний простір.
2. Апарат за п. 1, у якому запам'ятовувальний пристрій також зберігає третій вибраний тиск (Р3), значення якого менше значення першого вибраного тиску (Р1) і більше значення другого вибраного тиску (Р2), а комп'ютер запрограмований з можливістю повторної зупинки двигуна для припинення переміщення поршня із забезпеченням повторної зупинки потоку текучого середовища до кінчика голки, коли миттєве значення тиску досягає значення третього вибраного тиску (Р3) після досягнення ним значення другого вибраного тиску (Р2).
3. Апарат за п. 1, у якому керуючий пристрій містить засоби введення для одержання щонайменше одного параметра, включаючи щонайменше перший вибраний тиск(Р1).
4. Апарат за п. 2, у якому керуючий пристрій містить засоби введення для одержання множини параметрів, що містять щонайменше один із першого, другого та третього вибраних тисків (P1, P2, Р3).
5. Апарат за п. 1, у якому перший вибраний тиск (Р1) становить від приблизно 25 мм рт. ст. до приблизно 300 мм рт. ст.
6. Апарат за п. 1, у якому другий вибраний тиск (Р2) становить від приблизно 25 мм рт. ст. до приблизно 100 мм рт. ст.
7. Апарат за п. 2, у якому третій вибраний тиск (Р3) становить від приблизно 80 мм рт. ст. до приблизно 180 мм рт. ст. в залежності від анатомічного простору, перший вибраний тиск (Р1) становить від приблизно 80 мм рт. ст. до приблизно 300 мм рт. ст. залежно від анатомічного простору, а другий вибраний тиск (Р2) становить від приблизно 20 мм рт. ст. до приблизно 100 мм рт. ст. залежно від анатомічного простору.
8. Апарат за п. 3, у якому зазначений щонайменше один параметр вибраний з групи, що складається з: довжини ін'єкційних трубок, внутрішнього діаметра ін'єкційних трубок, в'язкості текучого середовища для ін'єкції, складу текучого середовища для ін'єкції та температури текучого середовища для ін'єкції.
9. Апарат за п. 1, у якому датчик тиску вбудований у лінію з нероз'ємним з'єднанням між протилежним кінцем шприца та трубками.
10. Апарат за п. 1, у якому привідний блок містить корпус із порожниною для шприца для втримання основної частини шприца в зафіксованому осьовому положенні на корпусі та з можливістю знімання з корпусу, і виїмку для поршня, який виконаний з можливістю вільного переміщення, арматуру шприца, що містить платформу, виконану з можливістю переміщення вздовж виїмки для поршня, причому поршень містить упор для великого пальця руки, платформа містить щонайменше один установлений з можливістю повороту пружинний зачіп для зчеплення з упором для великого пальця руки, коли платформа переміщена для зчеплення з упором для великого пальця руки, із забезпеченням осьового з'єднання платформи з упором для великого пальця руки таким чином, що переміщення платформи у протилежних напрямках забезпечує переміщення поршня у протилежних напрямках, арматура шприца містить датчик для вимірювання величини переміщення платформи для зчеплення з упором для великого пальця руки, а комп'ютер запрограмований з можливістю зупинки переміщення платформи під впливом датчика, коли платформа приведена у зчеплення з упором для великого пальця руки.
11. Апарат за п. 1, що містить спеціальний з'єднувач, який електрично та механічно приєднаний між датчиком тиску і керуючим пристроєм для забезпечення роботи керуючого пристрою тільки у випадку, якщо штатний вузол одноразових елементів з'єднаний з датчиком тиску.
12. Апарат за п. 1, у якому кінчик голки виконаний з можливістю введення в один з наступного: простір в епідуральній тканині, міжсуглобний простір; внутрішньоочну рідину очного яблука; судину тіла та простір у тканині, що складається в основному з біологічних текучих середовищ.
13. Апарат за п. 12, у якому голка являє собою голку катетера.
14. Апарат за п. 1, у якому текуче середовище для ін'єкції містить лікарські засоби.
15. Апарат за п. 1, що додатково містить візуальний сигнал, який керований керуючим пристроєм і вказує на кожний запуск або зупинку потоку текучого середовища.
16. Апарат за п. 1, що додатково містить генератор звукового сигналу, який керований керуючим пристроєм і створює звукове оповіщення при кожному пуску або зупинці потоку текучого середовища.
17. Апарат за п. 1, у якому вузол одноразових елементів містить тверду подовжену рукоятку, нерознімно з'єднану з трубками для забезпечення з'єднання з голкою, причому рукоятка має довжину від приблизно 10 до 20 см.
Текст
Реферат: Автоматичний ін'єкційний апарат використовує переривчастий потік лікарських засобів для ідентифікації передбачуваної ділянки ін'єкції і містить привідний механізм, датчик і керуючий пристрій для забезпечення потоку текучого середовища і тиску та запобігання потоку текучого середовища доти, поки тиск не зменшиться до значення, яке менше попередньо визначеного граничного значення. Граничне значення тиску визначають на підставі внутрішнього тиску, створюваного під час здійснення ін'єкції, причому додаткове текуче середовище не буде текти доти, поки значення внутрішнього тиску не зменшиться до значення, яке менше попередньо визначеного значення тиску. Ін'єкцію здійснюють для визначення первісного граничного значення тиску і для наступної зупинки потоку текучого середовища в пацієнта доти, поки значення тиску не зменшиться до значення, яке менше попередньо визначеного значення тиску, що забезпечує можливість поновлення потоку текучого середовища, що у свою чергу забезпечує ідентифікацію наповненого текучим середовищем простору в тканині. Первісне граничне значення тиску використовують як параметр керування для мікропроцесора, причому при значеннях тиску нижче граничного мікропроцесор керує швидкістю ін'єкції текучого середовища. Потік текучого середовища при тиску, який менше конкретних значень тиску, UA 114629 C2 (12) UA 114629 C2 також використовують для ідентифікації конкретного місця розташування в тілі пацієнта під час виконання ін'єкцій. UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 ОБЛАСТЬ ТЕХНІКИ і РІВЕНЬ ТЕХНІКИ Даний винахід у цілому відноситься до вдосконалень в області доставки лікарських засобів, зокрема до систем для підшкірної ін'єкції/аспірації в наповнений текучим середовищем простір тіла. Зокрема, даний винахід пропонує спосіб і обладнання для ідентифікації наповненого текучим середовищем простору в тканинах тіла шляхом зупинки потоку текучого середовища на підставі попередньо визначеного результату вимірювання тиску і шляхом поновлення потоку текучого середовища після зменшення тиску до значення, яке менше за попередньо визначений результат вимірювання тиску. Відомо, що проведена з місцевою анестезією блокада простору в епідуральній тканині забезпечує ефективне тимчасове знеболювання нижніх кінцівок тіла. Вона може бути успішно використана при проведенні цілого ряду інвазивних процедур в організмі, включаючи, без обмеження, процес пологів, заміщення тазостегнового суглоба протезом, і ряд інших хірургічних процедур, при проведенні яких необхідна анестезія нижньої половини тіла. Вона також може бути успішно використана при лікуванні хронічних і гострих болів, включаючи, наприклад, біль у спині, ураження хребців і стискання додаткових нервів хребетного стовпа. Для забезпечення ефективної місцевої анестезії і блокування нервової трансмісії в ЦНС, у безпосередній близькості від спинного мозку на певному рівні хребетного стовпа, на анатомічній ділянці, що має назву епідуральний "простір", має бути розміщений достатній обсяг розчину місцевих анастетичних засобів. Епідуральний простір являє собою частину хребетного каналу, не зайняту твердою мозковою оболонкою і її вмістом. Епідуральний простір розташований між оболонкою і окістям, що вистилає внутрішню поверхню хребетного каналу. Епідуральний простір проходить від великого потиличного отвору до крижової щілини. Передні і задні корінці нервів, покриті оболонкою, проходять через епідуральний простір і сходяться в міжхребетних тілах і міжхребетних дисках. Збоку епідуральний простір обмежений окістям ніжок дуг хребців і міжхребетними отворами. Обмежуючими епідуральний простір позаду конструкцій є окістя передньої поверхні пластинок дуг хребців, суглобні відростки і їх сполучні зв'язки, окістя основи остистих відростків, і простору між пластинками, наповнені жовтим зв'язкам. Простір містить венозні сплетення і жирову тканину, безперервно зв'язану з жировою тканиною в навколохребетному просторі. Наповнений текучим середовищем епідуральний простір (задній епідуральний простір) являє собою обмежену анатомічну ділянку неправильної форми площею в кілька квадратних міліметрів відносно поперечного переріза хребців і хребетного стовпа. Наповнений текучим середовищем простір є вкрай вузьким і розташований в безпосередній близькості від оболонки хребетного стовпа, причому жовта зв'язка розташоване в безпосередній близькості від нього. Відповідно, необхідно точно визначити положення наповненого текучим середовищем простору при виході зрізу або кінчика голки з жовтої зв'язки, тому що при подальшому проникненні голки буде проколота оболонка. Стандартний прийом виявлення місця розташування наповненого текучим середовищем епідурального простору являє собою прийом "втрати опору". У даному прийомі використовують шприц із низьким коефіцієнтом тертя, виконаний із пластику або скла і з'єднаний з епідуральною голкою Туохі (16-18 калібру). Блокада може бути виконана, коли пацієнт перебуває в сидячому положенні або лежачи на боці. Пацієнтові потрібно запропонувати прийняти "позу ембріона", тому що при цьому відкриваються простори між остистими відростками і таким чином легше визначити міжхребетний простір. Епідуральні ін'єкції можуть бути виконані на будь-якому рівні поперекового і грудного відділів хребта, що дозволяє використовувати їх при виконанні різних процедур: від торакальної хірургії до процедур, що проводяться на нижніх кінцівках. Лікар пальпує хребетний стовп на відповідному рівні хребетного стовпа між хребцями. Здійснюють місцеву анестезію в поверхневих тканинах, що приводить до місцевого знеболювання тканин даної ділянки. Потім дерму проколюють за допомогою голки Туохі, а голку просувають, причому лікар одночасно натискає на поршень шприца. Передаваємий на поршень тиск ненавмисно приводить до безперервного виходу обсягу текучого середовища з голки усередину тканин. Уведення епідуральної голки триває, і голку проводять через надосну зв'язку, причому голка спрямована в злегка краніальному напрямку. Голку просувають у міжостисту зв'язку, що лежить на глибині 2-3 см, доти, поки лікар суб'єктивно не відчує збільшення опору при проходженні голки усередину жовтої зв'язки. Голку проводять далі доти, поки суб'єктивне "відчуття" опору, випробовуване хірургом, не приведе до вираженого "зворотнього тиску" на поршень. Лікар повинен суб'єктивним чином розпізнати "зворотній тиск" або виявлений опір для визначення місця розташування анатомічної структури жовтої зв'язки. Наконечник голки проникає в 1 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 наповнений текучим середовищем епідуральний простір після проходження голки через жовту зв'язку. Відомий недолік зазначеного прийому полягає у втраті текучого середовища, що витікає в тканини, коли наконечник голки розташований у міжостистої зв'язки, внаслідок того, що тканини на зазначеній ділянці не мають значної щільності. Глибина переміщення голки Туохі від моменту проколювання дерми до моменту визначення жовтої зв'язки може значно варіюватися залежно від фізичних розмірів тіла пацієнта. При роботі з пацієнтами, що страждають від надмірної ваги, використання даного підходу ускладнене, а при роботі з пацієнтами, що страждають від патологічного ожиріння, зазначений підхід може бути непридатним внаслідок обмежень, що накладаються суб'єктивною сутністю даного підходу. Додатковим обмежувальним фактором є вік пацієнта внаслідок ускладнень, пов'язаних з меншим розміром простору в епідуральній тканині. У результаті, маленьким дітям найчастіше проводять більш небезпечну процедуру - загальну анестезію. На жаль, при неправильному проведенні епідуральної процедури, додаткове текуче середовище безладно вводиться в тканини при спробах визначення місця розташування наповненого текучим середовищем епідурального простору. Додаткове текуче середовище, що уведене в зазначені тканини, може додатково ускладнити процес визначення наповненого текучим середовищем простору. Крім того, при переміщенні голки Туохі після виявлення епідурального простору (внаслідок видалення шприца або випадкового руху руки пацієнта або лікаря), голка може бути випадково виведена за межі простору в епідуральній тканині або (у найгіршому разі) просунута у тверду оболонку спинного мозку з її супутньою перфорацією, яка може нести за собою довгострокові наслідки для здоров'я пацієнта. Навіть у випадку, якщо спочатку епідуральний простір виявлений вірно, при подальшому просуванні голки під час уведення анестетичного розчину, у спинний мозок може бути введена доза анестетичного розчину, що приводить до тимчасового або необоротного ушкодження нервів. У медицині широко відомі обладнання і системи насосів для введення, що використовуються для доставки або для дозованої подачі запропонованих лікарських засобів до пацієнта. Було проведено безліч спроб адаптувати зазначені обладнання для виконання епідуральної ін'єкції. З рівня техніки відомі спроби використання вимірювального перетворювача тиску для вимірювання тиску в шприці (див. патент США № 5,295,967, Rondelet і ін.). Суттєвий недолік цих систем полягає у відсутності можливості регулювання витрати і/або тиску текучого середовища для компенсації змін опору у всій системі. У патенті США № 7,922,689 (Lechner) розкрите обладнання для виявлення анатомічної порожнини, що покладається на використання оповіщення (тобто звукового або візуального попереджувального сигналу), що вимагає ручної модуляції системи доставки лікарських засобів оператором під час процедури ін'єкції. Зазначене обладнання вимагає наявності безперервного потоку текучого середовища для визначення епідуральних тканин, подібно з ручним прийомом "втрати опору" шприца. Крім того, обладнання засноване на відносній зміні звуку, пов'язаній зі зменшенням тиску, для визначення епідуральних тканин. Обладнання вимагає суб'єктивної інтерпретації подій, на які повинен відреагувати оператор. Крім того, обладнання забезпечує безперервну доставку текучого середовища для ін'єкції і намагається виробити тиск, достатній для виконання вищевказаної процедури за допомогою автоматичного обладнання насоса шприца. Однак, обладнання не забезпечує засобів автоматичного керування тиском ін'єкції доставки текучого середовища або засобів аспірації доставки лікарських засобів під час використання. Відповідно, обладнання за патентом США № 7,922,689 підтримує витрати для ін'єкції, незважаючи на надмірний тиск текучого середовища, яке може привести до болючих відчуттів і/або ушкодження тканини. Принцип використання тиску як вимірювального показника для виконання безпечної і ефективної епідуральної ін'єкції широко відомий у медичній літературі. Тиск використовували для визначення епідурального простору, а важливість тиску усередині епідурального простору була описана рядом дослідників, що використовували ряд різних експериментальних систем, протягом багатьох років. Усубіага (Usubiaga) і ін. описали взаємовідношення тиску і епідурального простору при виконанні ін'єкції в епідуральний простір і тканини (Anesth. Analg., 46: 440-446, 1967 р.). Гузенмейєр і Уайт описали прийом виконання поперекової епідуральної ін'єкції і взаємовідношення з тиском при проведенні ін'єкцій вагітним пацієнтам (Br. J. Anaesth., 52:55-59, 1980 р.). Інші дослідники, включаючи Пола (Paul) і Уайлдсміта (Wildsmith) (Br. J. Anaesth., 62:368-372, 1989 р.) і Хірабаясі (Hirabayashi) і ін. (Br. J. Anaesth., 1990 р., 65:508-513), також оцінювали взаємовідношення між тиском і впливом опору на проведення епідуральної 2 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 ін'єкції. Лакшмі Вас (Lakshmi Vas) зі співробітниками використовував зазначені принципи в області педіатричної медицини (Pediatric. Anesth. 11:575-583, 2001 р.). Лехнер і ін. описали систему епідуральних ін'єкцій з ручними маніпуляціями на основі зворотного зв'язку тиску (Anesthesia, 57:768-772, 2002 р.; Anesth. Analg. 96:1183-1187, 2002 р.; Euro. J. Anaestheol. 21:694-699, 2004 р.). Розкритий в даному описі винахід дозволяє підвищити надійність і безпеку виконання епідуральної ін'єкції шляхом обмеження обсягу текучого середовища, необхідного для визначення епідурального простору. Винахід також дозволяє вдосконалити відомі прийоми шляхом забезпечення заданої границі тиску і заданого поновлення потоку текучого середовища при значеннях тиску нижчого зазначеної границі тиску. Крім того, при поновленні системою потоку текучого середовища забезпечена подача звукового і/або візуального сигналу, що дозволяє визначити момент уведення голки в наповнений текучим середовищем простір епідуральної ділянки. У патенті США № 6,200,289 (Хохман і ін.) за співавторством заявника даної заявки, включеної до даної заявки шляхом посилання, розкрито автоматичне ін'єкційне обладнання, що містить приводний механізм, що забезпечує потік терапевтичного текучого середовища з касети, що опирається на тримач касети, трубку і рукоятку з голкою для ін'єкції. Приводний механізм з'єднаний з електродвигуном і датчиком, розташованим на виході двигуна, що і вимірює зусилля, що прикладається двигуном до приводного механізму. Зазначене зусилля потім використовують для визначення внутрішньої характеристики, такої як сила внутрішнього тиску, вироблена під час процесу виконання ін'єкції. Потім мікропроцесор або керуючий пристрій використовує цю характеристику в якості керуючого параметра і виробляє відповідні команди для приводного механізму. У найбільш переважному прикладі реалізації зазначену характеристику використовують для розрахунків вихідного тиску, з яким обладнання виводить текуче середовище по подовженій трубці. Потім електродвигуном керують таким чином, що вихідний тиск підтримується на заданому рівні для запобігання болючих відчуттів і/або ушкодження тканин тіла пацієнта. Опублікована патентна заявка US2011/0120566 (Омі і ін.) відноситься до несуміжної області техніки: способів подачі небіологічного текучого середовища для виготовлення напівпровідників на об'єктах хімічної і медичної промисловості. Посилання на зазначену заявку зроблено внаслідок того, що вона містить ідею переривчастої зміни витрати текучого середовища з використанням заснованого на тиску обладнання керування витратою. Зондування анатомічного простору в зазначеній заявці не розглянуте, і фахівцеві в області розробки апаратів і способів медичного лікування не потрібно розглядати зазначений несуміжний рівень техніки. В опублікованій патентній заявці US2011/0301500 (Мегуайєр і ін.) розкрито автоматизоване обладнання для проколювання посудини з одержанням тривимірного зображення в близькому інфрачервоному діапазоні і голка з роботизованим приводом для забезпечення одночасних діагностичних випробувань у реальному часі. У заявці зазначено, що венопункція являє собою процес одержання проби венозної крові для виконання різних випробувань. Навчений персонал бере проби вручну з вени або органа, розташованого поблизу від поверхні шкіри, але зазначені процеси мають ряд специфічних недоліків. У зазначеному посиланні використовують одержання інфрачервоного зображення і голку з роботизованим приводом для вирішення проблеми, але не використовують значення тиску текучого середовища для сприяння визначенню наявності вени або органа. Незважаючи на те, що в заявці розглянуто тиск, дане згадування відноситься до механічного тиску, що перешкоджає переміщенню голки з механічним приводом для запобігання ушкодження тіла пацієнта, а не до тиску текучого середовища в голці. Також див. опубліковану патентну заявку США US2006/0122555 (Хохман), включену в дану заявку за допомогою посилання, у якій розкрито вбудований датчик тиску текучого середовища, що розташований між шприцом і трубками, з'єднаними з голкою для ін'єкції текучого середовища. Інші патенти, у яких розкрито використання зусилля попередньої механічної напруги (замість вимірювального перетворювача) для виявлення і керування потоком текучого середовища, включають патенти США №№ 8,197,443 і 8,137,312, у яких розкриті апарати і способи виявлення. Також див. патент США № 8,142,414, у якому описані способи ін'єкції текучих середовищ у суглоби з використанням ручного вузла, патент США № 8,079,976, у якому описана ін'єкційна система для суглобних ін'єкцій, і опубліковану патентну заявку US2006/0122555, у якій описано 3 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 обладнання для введення лікарських засобів для ідентифікації тканини цереброспинальної осі і периферичної нервової тканини з використанням визначення вихідного тиску. Додаткова, більш свіжа робота Лехнера також розкрита в його патентних заявках US2012/0101410 на блок, вузол, обладнання і спосіб випробування вимірювальних засобів, виконаних у медичному обладнанні визначення місця розташування, і US2012/0022407 на обладнання для визначення місця розташування конструкції усередині тіла. Як і раніше існує необхідність у створенні апарата і способу, що забезпечують можливість точного керування введенням голки в наповнений текучим середовищем анатомічний простір, що має менший тиск у порівнянні з навколишніми його тканинами, такими як епідуральний простір поблизу хребта, міжсуглобний простір у суглобах, і наповнені текучим середовищем судини тіла, причому апарат і спосіб виконані з можливістю керування введенням текучого середовища в епідуральний простір і аспірацією текучого середовища з епідурального простору, а також апарат і спосіб відповідають вимогам підтримки стерильного поля і стерильних умов. СУТНІСТЬ ВИНАХОДУ Завдання даного винаходу полягає в створенні способу і апарату або обладнання, що дозволяють лікареві точно і відтворено здійснювати ін'єкцію в необхідну ділянку наповненим текучим середовищем тканини тіла пацієнта. Обладнання і спосіб обмежують больові відчуття і ушкодження тканини, пов'язані з ін'єкцією, ризик ускладнень внаслідок неправильної ін'єкції і, що надзвичайно важливо, значно зменшують обсяг текучого середовища для ін'єкції, що вводиться в нецільові тканини. Обладнання використовує специфічні відмінності в щільності тканини або опорі наповненого текучим середовищем простору в тканинах, а також супутніх значень тиску, значно більш низьких у порівнянні з навколишнімиорганами, сполучною тканиною або іншими тканинами тіла. Відомо, що сполучні тканини тіла створюють тиск понад 200 мм рт. ст. при ін'єкції в них текучого середовища зі швидкістю 0,07 мл/с. Кожна тканина має індивідуальні характеристики тиску і щільності, які представлені у вигляді вимірюваних тисків, які можуть бути виявлені в заданому виді тканини. Щільність або опір тканини вимірюють із використанням тиску текучого середовища, уведення якого проводять за допомогою керованої комп'ютером системи доставки лікарських засобів, виконаної з можливістю виявлення опору тиску під час уведення. Також варто відзначити, що наповнені текучим середовищем простори, такі як епідуральні тканини, міжсуглобний простір суглобів або судини тіла, мають тиск, що вимірюється під час ін'єкції і складає значно менше 200 мм рт. ст. По суті, було виявлено, що наповнені текучим середовищем простори мають значно більш низький опір тиску потоку текучого середовища, наближений до 0 мм рт. ст, при введенні в зазначені ділянки наповненим текучим середовищем тканини. На підставі сучасного розуміння ін'єкції із заданою цільовою ділянкою наповненою текучим середовищем простору в тканини, цільову ділянку може бути визначено за допомогою системи введення текучого середовища під тиском текучого середовища, що запобігає потоку, до проникнення голки в наповнений текучим середовищем простір у тканині, що дозволяє тиску зменшуватися до значення нижче заданого тиску в тканинах. При використанні заданого максимального значення тиску, що автоматично унеможливлює безперервний потік лікарських засобів у навколишні тканини, що і відновлює потік лікарських засобів лише після зменшення тиску до значення нижче іншого заданого значення, обладнання дозволяє забезпечити визначення наповненого текучим середовищем простору на підставі поновлення потоку текучого середовища під час здійснення ін'єкції. В обладнанні може бути використано один або два різні задані тиски (наприклад, перший і третій тиск) для зупинки потоку текучого середовища, і інший (наприклад, другий) заданий тиск для поновлення потоку текучого середовища під час здійснення ін'єкції. Також можливий варіант, у якому перший заданий тиск використовують для зупинки потоку текучого середовища, а другий заданий тиск вибирають таким чином, що він відновлює потік текучого середовища після успішного визначення наповненого текучим середовищем простори. Обоє варіанти дозволяють по суті обмежити влучення текучого середовища в нецільові тканини шляхом усунення необхідності безперервного потоку текучого середовища при розміщенні голки, і забезпечити визначення наповненого текучим середовищем простору після поновлення потоку текучого середовища в тканинах пацієнта. Також може бути використаний третій заданий тиск, виконаний з можливістю зупинки потоку текучого середовища по досягненню заданої границі тиску, меншої в порівнянні із границею вищеописаного першого заданого тиску. Зазначений варіант забезпечує ще більшу безпеку при здійсненні ін'єкції текучого середовища у випадку зсуву голки із цільової ділянки під час здійснення ін'єкції пацієнтові. 4 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 Відповідно, ін'єкційне обладнання згідно із даним винаходом містить резервуар для текучого середовища (обладнання для зберігання текучого середовища), текуче середовище для ін'єкції, нагнітальний механізм, кінець, що сполучений за допомогою текучого середовища з резервуаром і виконаний з можливістю його вставки в тіло пацієнта, датчик, виконаний з можливістю визначення результату вимірювання опору текучого середовища для ін'єкції, і керуючий пристрій, виконаний з можливістю приймання результату вимірювання опору від датчика, з можливістю розрахунків тиску і з можливістю регулювання витрат текучого середовища для ін'єкції. Датчик може являти собою вбудований датчик, розміщений між нагнітальним механізмом і кінцем, однак переважно датчик розміщений між нагнітальним механізмом або шприцом і переднім кінцем набору трубок, що вимірює тиск текучого середовища для ін'єкції. В іншому варіанті датчик може бути розміщений усередині механічної руки маніпулятора. Датчик, такий як вимірювальний перетворювач, використовують для вимірювання зусилля або тиску, створюваного двигуном і, поршнем що прикладається в обладнанні для зберігання текучого середовища. Відповідно одному з аспектів винаходу, вимірювальний перетворювач вимірює силу між адаптером карпули і іншою частиною корпуса обладнання. Згідно з іншим аспектом винаходу, вимірювальний перетворювач містить обладнання для визначення розміру що визначає зміну розмірів елемента обладнання, причому зазначена зміна вказує на силу тиску лікарських засобів усередині обладнання і на тиск. Наприклад, зміна розміру трубок може бути використана в якості показника зазначеної сили тиску. В іншому прикладі реалізації тиск усередині трубки вимірюють зовні і використовують у якості засобів визначення тиску текучого середовища. Передбачено, що керуючий пристрій виконаний з можливістю приймання параметрів, що вводяться користувачем, що включають, наприклад, заданий максимальний тиск, заданий тиск поновлення і задану витрату. Керуючий пристрій також виконаний з можливістю регулювання витрати, включаючи зменшення витрати по суті до нульового значення. Керування витратою може бути двійковим (тобто може бути забезпечена задана витрата, коли вимірюваний тиск менше заданого максимального тиску, і потік може бути зупинений, коли вимірюваний тиск текучого середовища менше заданого максимального тиску) або витрата може залежати від тиску (тобто витрата збільшується при зменшенні вимірюваних значеннях тиску нижче заданого максимального тиску). В останньому випадку витрата при необхідності може мати задане значення максимально допустимої витрати. Аналогічним чином, залежність витрати і вимірюваного тиску текучого середовища також може бути задана користувачем. У корисних прикладах реалізації заданий максимальний тиск становить від приблизно 50 мм рт. ст. до приблизно 300 мм рт. ст., або від приблизно 100 мм рт. ст. до приблизно 250 мм рт. ст. При необхідності, вимірюване значення опору тиску беззупинно перетворять у візуальний і звуковий сигнал. Потім результати вимірювання надають лікареві, у результаті чого лікар може визначити або підтвердити, чи здійснена доставка ін'єкції в належні тканини. Крім того, результати вимірювання також зберігають для наступного розгляду і складання документації, що відноситься до клінічної процедури. Верхні границі тиску і керування витратою можуть бути задані заздалегідь щоб уникнути використання надмірного тиску і/або витрати під час зазначеного процесу. Відповідно, даний винахід пропонує спосіб уведення ін'єкції пацієнтові шляхом забезпечення резервуара для текучого середовища, текучого середовища для ін'єкції, нагнітального механізму і кінця, виконаного з можливістю введення в тіло пацієнта; нагнітання текучого середовища з резервуара в тіло пацієнта; розрахунків тиску текучого середовища на границі між кінцем і тканиною зазначеного пацієнта, і керування витратою текучого середовища для ін'єкції таким чином, що тиск не перевищує заданого максимального тиску, після чого витрати текучого середовища відновлюють після зменшення тиску до значення нижче заданого значення тиску. В одному із прикладів реалізації обладнання і способів по даному винаходу використовують для здійснення епідуральної ін'єкції. У другому прикладі реалізації обладнання і спосіб по даному винаходу використовують для здійснення ін'єкції в наповнений текучим середовищем міжсуглобний простір. В обох прикладах реалізації текуче середовище для ін'єкції містить, наприклад, анестетичний засіб, а кінець виконаний з можливістю введення в наповнене текучим середовищем епідуральний або міжсуглобний простір у тканинах. Передбачено, що для визначення наповненого текучим середовищем простору в тканинах під час фази розміщення голки використовують утримуюче фармацевтичні засоби або не утримуюче фармацевтичні засоби текуче середовище. Підходящі текучі середовища, що не містять фармацевтичні засоби, включають, наприклад, фізіологічний розчин, фізіологічний розчин з фосфатним буфером, 5 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 штучну цереброспинальну рідину, розчин Рінгера, 5 % розчин декстрози або відфільтроване повітря. Після визначення наповненого текучим середовищем простору в тканинах за допомогою способу різниці тисків, текуче середовище для ін'єкції заміняють (тобто, потрібна наявність безлічі резервуарів для текучого середовища) на текуче середовище, що містить фармацевтичні засоби. Використання текучого середовища, що не містить фармацевтичні засоби, під час фази розміщення голки дозволяє мінімізувати або запобігти введенню фармацевтичних засобів у нецільові тканини. Найчастіше процедури, що вимагають проведення епідуральної ін'єкції анестетичних засобів, є тривалими і, на додаток до первісної (навантажувальної) дози, потрібне введення однієї або більшої кількості наступних (підтримуючих) доз. Зазвичай для введення безлічі доз використовують постійний катетер. В іншому прикладі реалізації винахід забезпечує спосіб здійснення епідуральної ін'єкції, що вимагає проведення безлічі ін'єкцій, у якому, при введенні другої (і наступних) доз, тиск текучого середовища на границі між кінцем і тканиною зазначеного пацієнта розраховують, а витратою текучого середовища для ін'єкції під час зазначеної другої ін'єкції керують таким чином, що тиск не перевищує заданого максимального тиску. Подібним чином, зазначений прийом може бути використаний для обслуговування постійного катетера (тобто для визначення, чи перебуває катетер у цільовій тканині, такій як простір в епідуральній тканині), незалежно від того, передбачена або бажана на той момент додаткова ін'єкція. Також передбачено, що ін'єкційне обладнання може бути використане для аспірації наповненого текучим середовищем простору в тканинах після його визначення. Аспірація може бути використана для витягу проби тканини або позаклітинного текучого середовища (тобто цереброспинальної рідини, міжсуглобної рідини, крові і т.д.) або для визначення правильного розміщення голки для ін'єкції. Під час процедури аспірації "вхідний тиск" вимірюють ідентично до вимірювання тиску усередині наповненого текучим середовищем простору в тканинах, для якого характерне зменшення тиску. Подібним чином, неправильне зменшення тиску також визначають за допомогою процедури аспірації внаслідок того, що структура внутрішньої тканини (тобто кісти) швидко втрачає свій вміст, а вхідний тиск збільшується до значення, що перевищує граничне значення вхідного тиску. Двигун, з'єднання, що пов'язане із двигуном, і електронний керуючий пристрій, розкриті в нижчеподаному описі, щонайменше частково розміщені в корпусі апарата для захисту зазначених елементів. Заповнюють обладнання для зберігання текучого середовища і починають процес підготовки, під час якого лікар розміщає попередньо заповнений шприц у приймачі для шприца, розташований на верхній частині інструмента. Лікар може змінити витрати і піковий тиск текучого середовища, призначений для дозованої подачі. Потім лікар використовує засоби керування (сенсорний екран або пневматичні засоби, такі як ножна педаль) і ініціює потік текучого середовища. В іншому варіанті лікар може давати електронні або голосові команди. Під час дозованої подачі текучого середовища, одержувані від вимірювального перетворювача дані використовують для розрахунків поточного тиску текучого середовища. При наближенні зазначеного тиску до заданого порога, потік текучого середовища автоматично зупиняють для запобігання надмірного введення лікарських засобів у нецільові тканини, що дозволяє переконатися, що пацієнт не відчуває непотрібних больових відчуттів або ушкодження тканин внаслідок надмірного потоку текучого середовища. Також забезпечена численна кількість необов'язкових ознак, включаючи аспірацію, продувку або зарядку середовища з використанням повітря або без його використання. Під час усього процесу, лікар має постійний доступ до поточних даних, що стосуються поточного процесу, з візуальним і звуковим оповіщенням, включаючи поточну витрату, загальний виведений або аспірований обсяг, значення тиску тканини, вхідні тиски і інші параметри. Підпорядкований мікропроцесор одержує команди від провідного обладнання обробки даних і виробляє приводні сигнали, необхідні для роботи двигуна. В іншому прикладі реалізації забезпечена можливість виконання двох окремих приводів для забезпечення розміщення численної кількості шприців на одному обладнанні. У подібному прикладі реалізації, розкритому в даному описі, перший привід використовують із окремим шприцом, набором трубок і голкою для доставки перших лікарських засобів, а другий привід містить окремий шприц, вимірювальний перетворювач тиску, набір трубок і голку для других лікарських засобів. Кожний із приводів виконаний з можливістю виконання вищеописаних функцій. Крім того, один або два приводи можуть також бути використані без можливості визначення тиску і можуть бути використані винятково для доставки лікарських засобів при певній витраті. Цей привід може бути використаний для доставки місцевого анестетика перед 6 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 використанням другого приводу, у якому реалізована зазначена можливість обмеження заданого тиску для визначення наповненого текучим середовищем простору в тканинах. З урахуванням вищеописаних переваг обмеження введення лікарських засобів у нецільову ділянку сполучної тканини, існує необхідність забезпечення адекватної місцевої анестезії і уведення інших лікарських засобів у зазначені тканини без обмеження можливості введення терапевтичного засобу, такого як місцевий анестетик, для забезпечення поверхневої анестезії м'яких тканин перед здійсненням спроби визначення наповненого текучим середовищем простору в тканинах, такого як епідуральний простір, міжсуглобний простір або інші наповнені текучим середовищем простори тіла. Відповідно, інструмент із двома приводами дозволяє розв'язати зазначені завдання. Різні інноваційні ознаки винаходу розкриті в супутній формулі винаходу, що є частиною справжнього винаходу. З метою кращого розуміння винаходу, його робочих переваг і конкретних завдань, розв'язуваних при його використанні, зроблено посилання на супутні креслення і докладний опис, у яких проілюстровано і описано переважний приклад реалізації винаходу. КОРОТКИЙ ОПИС КРЕСЛЕНЬ На кресленнях: На фіг. 1 показаний вид авторизованого вузла одноразових елементів згідно із даним винаходом; На фіг. 1A показаний вид одного із прикладів реалізації спеціального з'єднувача згідно із даним винаходом; На фіг. 1B показаний вид другого прикладу реалізації спеціального з'єднувача згідно із даним винаходом; На фіг. 2 показаний вид зверху корпуса керованого комп'ютером блоку доставки лікарських засобів з вузлом одноразових елементів у місці використання; На фіг. 3 показаний подібний до фіг. 2 вид блоку без вузла одноразових елементів; На фіг. 4 показане схематичне зображення іншого прикладу реалізації керованої комп'ютером системи доставки лікарських засобів згідно із даним винаходом; На фіг. 5A показаний збільшений вид платформи поршня і верхнього кінця поршня циліндра згідно із даним винаходом; На фіг. 5B показаний подібний до фіг. 5A вид платформи, що наближається до упору для великого пальця руки або фланцю шприца для великого пальця руки; На фіг. 5C показаний подібний до фіг. 5A вид зачепів або засувок платформи, взаємодіючих з упором шприца для великого пальця руки; На фіг. 5D показаний подібний до фіг. 5A вид платформи, що переміщається у зворотному напрямку, на якому показані зачепи, що тягнуть назад упор для великого пальця руки; На фіг. 6 показаний частковий вид приводного блоку і його бічної панелі; На фіг. 7 показані одноразові компоненти, з'єднані в складанні, і ID-з'єднувач, уведений у бічну частину приводного блоку і, що передає дані на ЦП у приводному блоці, що і приймає дані від нього; На фіг. 8A-8G показані різні знімки сенсорного екрана приводного блоку під час різних фаз роботи винаходу; На фіг. 9 показаний схематичний вид у розрізі ділянки хребта пацієнта, що зазнає епідуральної ін'єкції, причому показані тканини, через які буде проходити голка, з кореляцією відносно установок тиску згідно із даним винаходом; і На фіг. 10 показаний вид із частковим рознесенням частин вузла одноразових елементів із трубками і голкою, а також з подовженою голкою для забезпечення з'єднання між трубками і голкою для поліпшення керування і рухових можливостей при здійсненні ін'єкції будь-якого виду, особливо корисної для покращень при здійсненні ін'єкцій у нижню альвеолярну артерію. РОЗКРИТТЯ ВИНАХОДУ З посиланням на креслення, на яких ідентичні або подібні елементи позначені аналогічними посилальними номерами, на фіг. 1 показаний вузол 10 одноразових елементів, що скаладається з різних частин, нерознімно з'єднаних один з одним, що і поставляється в стерильному впакуванні для одиничного використання разом з керованим комп'ютером інструментом доставки лікарських засобів або приводним блоком 50, показаним на фіг. 2 і 3, причому зазначені елементи разом формують систему, схематично показану на фіг. 4. Даний винахід відноситься до системи для визначення місця розташування і доставки лікарських засобів у наповнені текучим середовищем тканини, такі як епідуральний простір, міжсуглобний простір, очне яблуко, кісти, судини і інші наповнені текучим середовищем простори в тілі пацієнта. Ін'єкцію подібних лікарських засобів, таких як, без обмеження, місцеві анестетичні розчини, кортикостероїди, гідроксиапатит, засобу для відновлення суглобів, 7 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 склерозируючі агенти і інші засоби, у терапевтичних цілях зазвичай здійснюють шляхом уведення в наповнений текучим середовищем простір у тканинах. Важливо відзначити, що внаслідок ряду факторів, уведене текуче середовище поширюється по тканині з різною швидкістю, що приводить до варіювання тиску текучого середовища. Заявник виявив, що зазначений тиск (або внутрішній тиск, що пов'язаний з опором тиску тканини) вказує на різні види тканин і може бути використаний для їхньої ідентифікації. Даний винахід забезпечує спосіб і обладнання, що дозволяють лікареві точно виявляти наповнений текучим середовищем простір у тканинах і обмежити проникнення лікарських засобів у нецільові тканини. Зазначений процес виконують у рамках діагностичної і терапевтичної процедури. Дане обладнання використовує тиск текучого середовища з голки або катетера ("інжектора") після розміщення голки або катетера в тканині для вірного визначення точності розміщення і для контролю (вірного) розміщення під час здійснення ін'єкції або аспірації. Зокрема, дане обладнання використовує заданий перший тиск для запобігання потоку лікарських засобів на нецільовій (першій) ділянці тканини і для поновлення потоку текучого середовища після зменшення тиску до значення нижче заданого значення тиску. У додатковому прикладі реалізації обладнання може використовувати перший заданий перший тиск для запобігання потоку лікарських засобів і другий відмінний заданий тиск, до значення якого тиск повинен дійти для поновлення потоку. Використання заданого тиску забезпечує точне розміщення голки або катетера під час фази введення, фази виконання ін'єкції і фази обслуговування процедури. Спочатку тиск використовують під час уведення голки або катетера для визначення анатомічних структур і забезпечення можливості точного визначення лікарем моменту, коли порожнина інжектора розташовується усередині наповненого текучим середовищем простором в тканинах. Отже, переривчастий потік лікарських засобів використовують для визначення заданої цільової тканини. Заданий тиск також використовують для запобігання потоку лікарських засобів при визначеному значенні, а потім забезпечують поновлення потоку текучого середовища у випадку, якщо задане значення тиску нижче зазначеного значення. Зазначений процес може бути виконаний під час фази обслуговування процедури для того, щоб впевнитися, що інжектор розташований у цільових тканинах, таких як простір в епідуральній тканині. Під час виконання медичних процедур існує певний ризик, що вимагає виконання первісної епідуральної ін'єкції (тобто, навантажувальної дози) з наступними періодичними підтримуючими дозами для підтримки необхідного рівня знеболювання. Зазвичай в епідуральний простір уводять постійний катетер, що залишається прикріпленим до ін'єкційного обладнання протягом усієї процедури. Найчастіше в проміжку між навантажувальною дозою і однією або більшою кількістю підтримуючим дозами пацієнта переміщають. У результаті зазначеного переміщення правильно розміщений катетер може зміщатися із простору в епідуральній тканині в нецільову тканину. Дане обладнання відслідковує тиск при введенні всіх періодичних доз (тобто, навантажувальної дози і усіх наступних підтримуючих доз). Отже, лікарські засоби не вводять у нецільові тканини і у тканини, уведення лікарських засобів у які не має терапевтичного значення. Крім того, у випадку зсуву катетера у фазі обслуговування лікар одержує сигнал, що сповіщає. Дане обладнання використовує переривчастий потік текучого середовища і задані значення тиску для точного визначення вірного розміщення постійного катетера, і обмежує потік лікарських засобів у нецільові тканини. Таким чином, переваги даного обладнання в порівнянні з рівнем техніки включають: (i) засоби для ідентифікації наповненого текучим середовищем простори в тканинах, такого як епідуральний простір, міжсуглобний простір, очне яблуко, кісти і кровоносні або інші судини для текучого середовища, але не обмеженого зазначеними структурами, з використанням незначного обсягу утримуючого лікарські засоби розчину, (ii) засоби для ідентифікації нецільових тканин шляхом обмеження потоку лікарських засобів від першої границі заданого тиску, (iv) засоби контролю розміщення голки або катетера протягом усієї процедури катетеризації (тобто під час фаз обслуговування введення лікарських засобів) шляхом контролю потоку лікарських засобів у наповненому текучим середовищем просторі. Згідно із принципами даного винаходу, тиск вимірюють із використанням тиску або сили текучого середовища, ін'єкцію або введення якої проводять за допомогою керованої комп'ютером системи доставки лікарських засобів, виконаної з можливістю виявлення опору тиску під час уведення. Обмірюване значення опору тиску безупинно перетворять у візуальний і звуковий сигнал, причому потік лікарських засобів є переривчастим. Керовану комп'ютером систему доставки лікарських засобів безупинно регулюють на підставі вироблюваного тиску із забезпеченням переривчастого потоку текучого середовища. Відповідно, витрата варіюється і 8 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 залежить від тиску системи. Передбачено, що тиск являє собою головну керуючу змінну системи. Відповідно, витрата стає вторинною змінною, регульованої в рамках заданого діапазону для підтримки необхідного потоку текучого середовища. В одному із прикладів реалізації, потік текучого середовища зупиняють при значеннях тиску, що перевищують заданий поріг (максимальний тиск). Витрата, що представляє собою вторинну змінну, може бути обмежена, у результаті чого ін'єкції текучого середовища не є небажано швидкими в умовах низького тиску. Передбачено, що взаємовідношення між тиском і витратою текучого середовища може бути двійковим або безперервним. Двійкове взаємовідношення присутнє у випадку, якщо ін'єкційне обладнання виконане з можливістю доставки текучого середовища з однією заданою витратою при будь-якому тиску, меншому відносно заданого максимуму. Відповідно, потік текучого середовища або зупинено, або дозволено незалежно від того, чи перевищує тиск граничне значення. В іншому варіанті витрата може регулюватися у вигляді функції тиску. У цьому випадку витрата зменшується при наближенні до максимального значення тиску, і зростає в міру зменшення тиску. При необхідності, витрата може бути обмежена першим заданим максимальним тиском, причому витрату відновлюють при другому окремому заданому тиску. Також передбачено, що ін'єкційне обладнання при необхідності може містити засоби запису і/або відображення значимих даних про ін'єкцію, включаючи, наприклад, миттєве значення витрати, значення тиску і обсяг ін'єкції. Усі результати вимірів і дані можуть бути надані лікареві в реальному часі, у результаті чого лікар може визначити, чи відбувається доставка ін'єкції в задану ділянку і/або цільові тканини, і може відповідним чином змінити прийом введення ін'єкції. Крім того, результати вимірювання також можуть бути збережені для наступного розгляду і складання документації, що відноситься до клінічної процедури. Також передбачена можливість використання безлічі шприців, що приводяться окремими поршнями шприців, для забезпечення можливості введення безлічі лікарських засобів, а також можливість використання другого приводу шприца, що не вимагає досягнення заданого значення тиску для кожної із зазначених цілей. Другий привід може бути запрограмований на використання конкретної витрати для забезпечення введення лікарських засобів, таких як місцевий анестетик і інші терапевтичні засоби, у ряд тканин. В іншому прикладі реалізації обладнання може містити два окремі приводи шприців, причому обоє приводи виконані з можливістю регулювання на підставі тиску текучого середовища згідно з вищенаведеним описом. Авторизований вузол одноразових елементів Винахід включає інноваційну конструкцію вузла одноразових елементів або вузла одноразового користування, що складається зі шприца, вимірювального перетворювача, набору трубок і голки, а також одного з ряду унікальних спеціальних сполучних адаптерів (називаних у даному описі "ID-з'єднувачами"), що закріплюються і використовуваними в якості частини вузла одноразового користування, використовуваного разом з керованою комп'ютером системою доставки лікарських засобів. На фіг. 1 показано один із прикладів реалізації вузла одноразового користування згідно із даним винаходом. Керована комп'ютером система доставки лікарських засобів згідно із даним винаходом, показана на фіг. 2, 3 і 4, забезпечує безліч корисних переваг для пацієнтів внаслідок забезпечення більш точних ін'єкцій. Винахід також забезпечує безліч клінічних переваг для лікарів внаслідок забезпечення кращих результатів. Інструменти, що здійснюють винахід, показані на кресленнях для забезпечення більш точного і безпечного введення лікарських засобів у ряді областей, таких як епідуральні ін'єкції, міжсуглобні ін'єкції і інші підшкірні ін'єкції. Використання винятково авторизованих одноразових компонентів надзвичайно важливо для забезпечення належної роботи зазначених інструментів. Застосування неправильних компонентів може привести до ряду небажаних результатів, включаючи: 1. Уведення неправильних обсягів. 2. Невірні результати вимірювання витрати і тиску. 3. Використання невідповідних компонентів, що приводить до помилок. 4. Використання неадекватно сконструйованих неавторизованих замінних компонентів. Для забезпечення того, що належні одноразові компоненти використовуються разом з керованою комп'ютером системою доставки лікарських засобів згідно із даним винаходом, забезпечена наявність спеціального з'єднувача 12 (за фіг. 1. З'єднувач 12 має першу і другу деталі, що сполучаються, 14 і 16 і виконаний з можливістю забезпечення унікального з'єднання і/або з'єднання електричної схеми і/або передачі необхідних даних перед використанням. З'єднувач 12 виконує функцію керуючого елемента між частинами 10 вузла одноразових елементів, що складаються зі шприца 18, вимірювального перетворювача 20 тиску, набору 22 9 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 трубок і голки 24, а вузол з'єднаний з керованим комп'ютером інструментом 50 доставки лікарських засобів за фіг. 2 за допомогою штекера 30. На даний момент не існує конструктивних засобів для забезпечення підтвердження вибору одноразових компонентів, використовуваних разом з керованим комп'ютером інструментом доставки лікарських засобів. Спеціальне адаптерне з'єднання 12 згідно із даним винаходом дозволяє переконатися, що в комбінації з інструментом використовують винятково авторизовані, вірно настроєні правильні розміри, що мають, і стерилізовані вузли 10 одноразових елементів. Зазначене завдання вирішене за допомогою нижчеподаних конструктивних рішень. З'єднання 12 електронним чином з'єднує вбудований електронний вимірювальний перетворювач 20 тиску з керованим комп'ютером інструментом 50 доставки лікарських засобів за допомогою зовнішнього кабелю 21 передачі даних від вимірювального перетворювача 20 на першу сполучену деталь 14, підключену до другої сполученої деталі 16 і з'єднану за допомогою другого кабелю 23 і штекера 30, підключеного до інструмента 50. Вимірювальний перетворювач 20 тиску виконаний вбудованим, тобто з'єднаний безпосередньо між кінцем 19 циліндра шприца 18 і одним кінцем 25 трубок 22, наприклад, за допомогою з'єднання типу Люер, нерознімно закріпленої згідно з нижчеподаним описом, у результаті чого інструмент визначає і використовує миттєві фактичні тиски текучого середовища на лінії доставки лікарських засобів, що забезпечує точне наближення фактичного миттєвого тиску текучого середовища на кінчику або наконечнику голки 24, і відповідно, на ділянці в тілі пацієнта, на якій розташований наконечник. Електронний перетворювач тиску або датчик 20 видає дані про тиск по електронному кабелю передачі даних і з'єднувачу 21-12-23, з'єднаному безпосередньо із блоком 50 для збору таких результатів вимірювання тиску. Підтвердження або точка авторизації може бути забезпечена шляхом включення спеціального проміжного з'єднання 12 між електронним вимірювальним перетворювачем 20 тиску і керованим комп'ютером інструментом 50 доставки лікарських засобів. Спеціальне з'єднання 12 використовують для ідентифікації і підтвердження з'єднаних компонентів. Одноразові компоненти 10 надані у вигляді авторизованого одноразового нероз'ємного набору, у якому всі компоненти склеєно один з одним, тобто шприц 18 нерознімно з'єднано з набором 22 трубок, а електронний датчик тиску або електронний перетворювач 20 тиску нерознімно з'єднаний між ними, і всі елементи аж до першої деталі, що сполучається, 14, нерознімно з'єднані один з одним. Вузол 10 одноразових елементів використовують і утилізують у вигляді єдиного блоку. Вузол також з'єднано із приводним блоком 50 за допомогою другої деталі, що сполучається, 16, яка може бути з'єднана винятково з першою спеціальною деталлю, що сполучається, 14 для забезпечення винятково одноразового використання винятково авторизованих вузлів 10 одноразових елементів. Електронний вимірювальний перетворювач 20 тиску може являти собою, наприклад, будьякий з різних п'єзоелектричних датчиків тиску, надаваних компанією Merit Medical Systems, Inc., таких як виріб Meritrans® Pressure Transducer MER212. Спеціальне з'єднання 12, що розкрите в даному описі, називають "ID-з'єднувачем". IDз'єднувач 22 складається із двох компонентів: штекера 14 ID-з'єднувача і індивідуального приймача 16 ID-з'єднувача. Внаслідок того, що функції "штекера" і "приймача" можуть бути взаємно змінені, або кожний з елементів може мати ознаки штекера і приймача, зазначені деталі в даному описі також називають першою і другою деталями, що сполучаються, 14 і 16. Система ID-з'єднувача 12 виконана у вигляді електронного фізичного мосту між інструментом 50 і авторизованим, склеєним, одноразовим набором або вузлом 10 одноразових елементів. Штекер 14 ID-з'єднувача містить дві протилежні функціональні сторони 14a і 14b згідно фіг. 1A, уведені один у одного і нерознімно з'єднані один з одним. Одна зі сторін 14a являє собою стандартний штекер або розетку, що забезпечує з'єднання зі стандартним компонентом, таким як існуючий електронний вимірювальний перетворювач тиску (тобто, виріб Meritrans Pressure Transducer MER212) з одноразовими компонентами. Протилежна сторона 14b ID-з'єднувача 14 являє собою індивідуальну сторону штекера ID-з'єднувача і має один стандартний кінець, що вводиться убік 14a, і спеціальну протилежну сторону. Згідно з вищенаведеним описом, сторони 14a і 14b нерознімно з'єднано одна з одною. Сторона 14b індивідуального штекера ID-з'єднувача з'єднана за допомогою своєї спеціальної сторони, що сполучається, тобто індивідуального набору 14c виступів і поглиблень, із другим компонентом або приймачем 16 ID-з'єднувача за допомогою його спеціальної сторони, що сполучається, тобто відповідного набору 16a виступів і поглиблень. Дане з'єднання між 14c і 16a виконано рознімним, у результаті чого можуть бути використані замінюючі набори 10 одноразового користування. Частину 16 з'єднано із приводним блоком 50 за допомогою електронного кабелю 10 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 23 і штекера 30 згідно фіг. 1 і 2. Система ID-з'єднувача або з'єднувач 12 виконаний у вигляді безлічі різних унікальних конфігурацій для забезпечення додаткових комбінацій "розеткаштепсель" згідно фіг. 1В для забезпечення спеціального з'єднання власної розробки, що забезпечує унікальну характерну ознаку системи, що забезпечує підтвердження перед використанням. Згідно фіг. 1, інша схема авторизації винаходу включає комп'ютерний мікрочип, СИМ-схему або іншу схему 14d з унікальним кодом, яка також електрично з'єднана із приводним блоком 50 за допомогою кабелю 23 при сполученні частин 14 і 16, і зчитується програмою або схемою авторизації в блоці 50. Якщо кодована схема 14d є істинною, блок 50 працює в нормальному режимі; у інакшому випадку, блок вимикається, а на екран блоку виводиться попередження, таке як "Виявлений Неавторизований Шприц", а також при необхідності, генерується попереджуючий звуковий сигнал, включаючи, без обмеження, голосову версію повідомлення, попереджуючий звуковий сигнал, або інший попереджуючий сигнал або будь-яку комбінацію сигналів. Кодована схема 14d також запрограмована на одиничне використання, причому програма або схема авторизації виконана з можливістю визначення використання певного одноразового набору 10 раніше, і в такому разі, схема також виключає блок 20 і виводить попередження. Кодована схема 14d може також бути запрограмована з врахуванням фізичних (наприклад, трубки, голки і калібру шприца) і хімічних (наприклад, умісту шприца) властивостей одноразового вузла 10, які також зчитуються схемою або програмою в блоці 50. У такому разі кодована схема встановлює, примусово змінює або модифікує будь-які установки, вручну введені в блок 50, з урахуванням властивостей вузла одноразового користування для забезпечення належної і безпечної роботи блоку. Кодована схема 14d також може бути забезпечена з використанням або без використання спеціальних механічних ознак по фіг. 1A і 1B, але використання обох елементів збільшує надійність системи. У кожному разі, невдала спроба розпізнавання належного зв'язку (фізичного, електричного або цифрового) запобігає роботі інструмента 50. Таким чином, винахід передбачає інноваційне штепсельне з'єднання системи 12 IDз'єднувача для замикання необхідного ланцюга і забезпечення роботи інструмента по підтвердженню, визначенню дійсності і зчитуванню даних з належного набору одноразових елементів, обраного для зазначеного інструмента. Електронне з'єднання в системі IDз'єднувача забезпечує цифрові дані за допомогою запам'ятовувального пристрою в схемі 14d елемента 12 з'єднувача. Інноваційне штепсельне з'єднання ID-з'єднувача може також забезпечувати унікальний зв'язок інтерфейсу "ключ-замок", у такий спосіб підтверджуючи компоненти, використовувані в комбінації з інструментом 50. Одна або більша кількість із вищеописаних заходів безпеки можуть бути використані окремо або в будь-якій комбінації. Унікальна система 12 ID-з'єднувача розташована між поточним електронним вимірювальним перетворювачем 20 тиску і приводним блоком 50, однак передбачається, що система ID-з'єднувача може бути зв'язана, склеєна або з'єднана з іншими компонентами, використовуваними із зазначеним інструментом, наприклад, винятково зі шприцом або винятково з набором трубок. У переважному прикладі реалізації ID-з'єднувач розміщений між зазначеними двома зв'язками, однак передбачається, що зазначена система ID-з'єднувача може бути з'єднана на цілому ряді різних ділянок інтерфейсу і може зберігати функції, призначені для підтвердження і ідентифікації унікального одноразового набору. Насадка 12 працює у такий спосіб: систему ID-з'єднувача вручну прикріплюють на стику інтерфейсу рядом різних способів; і у переважному прикладі реалізації система ID-з'єднувача являє собою частину повного набору 10 одноразових елементів, що містить шприц, вимірювальний перетворювач, набір трубок і голку. У переважному прикладі реалізації нероз'ємне прикріплення голки може бути необов'язковим, у результаті чого лікар може вибрати переважну голку для вирішення певного завдання. Компоненти збирають окремо або, у переважному прикладі реалізації, їх склеюють (наприклад, за допомогою адгезива) один з одним і надають у вигляді єдиного одноразового набору, що дозволяє переконатися у виборі належних одноразових компонентів. Переважний приклад реалізації являє собою одноразовий набір із прикріпленим за допомогою адгезива ID-з'єднувачем. Передбачено, що в комбінації з інструментом 50 може бути використаний ряд конфігурацій. Зазначені конфігурації складаються з компонентів різного розміру, тобто голки, шприца, набору трубок і вимірювальних перетворювачів тиску. Інтеграція системи ID-з'єднувача дозволяє забезпечити авторизований набір, а також забезпечує можливість взаємодії з інструментом 50 для підтвердження і ідентифікації використовуваного одноразового набору. Зазначений етап важливий для підтвердження справжності компонентів 11 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 системи. Зазначений етап забезпечує використання належних компонентів і/або лікарських засобів. Передбачено, що заздалегідь наповнений шприц 18 з лікарськими засобами може бути наданий разом із системою 12 ID-з'єднувача і набором 10 одноразових елементів, або шприц може бути наданий порожнім і може бути заповнений необхідними лікарськими засобами, фізіологічним розчином або іншим текучим середовищем на місці. У випадку використання заздалегідь наповнених шприців 18 ID-з'єднувач 12 (у мікрочипі 14d) містить дані, що відносяться до зазначених лікарських засобів, розміщених у шприці і наданим для використання в інструменті. Удосконалення відносно рівня техніки включають ID-з'єднувач для підтвердження використання належних компонентів доставки лікарських засобів у комбінації з керованою комп'ютером системою доставки лікарських засобів. Система ID-з'єднувача також дозволяє вирішити безліч недоліків одноразової ін'єкційної системи. Важливо відзначити, що система не змінює трудовий процес під час підготовки інструмента, але забезпечує використання зазначеного інноваційного компонента. Система ID-з'єднувача не додає додаткових етапів, і забезпечує підтвердження справжності компонентів, використовуваних у загальній системі, і т.д. Використання системи ID-з'єднувача також забезпечує зменшення матеріальних витрат при забезпеченні підтвердження справжності. На фіг. 10 показані частини вузла одноразових елементів згідно з іншим прикладом реалізації винаходу, зокрема, трубки 22 з кінцем 22 нерознімно з'єднані із вбудованим датчиком тиску, не показаним на фіг. 10. Даний приклад реалізації містить тверду і стерильну пластикову рукоятку 27, прикріплену до протилежного кінця трубок 22, і містить з'єднання типу Люер для знімного з'єднання з обраною голкою 24 для здійснення певного виду ін'єкції на обраній анатомічній ділянці. Подовжена рукоятка 27 по зазначеному прикладу реалізації поліпшує ручне керування і рухові можливості при розміщенні голки, зокрема внаслідок наявності поворотного керування. Зазначена конфігурація особливо важлива при здійсненні ін'єкцій у нижню альвеолярну артерію, але також дозволяє поліпшити здійснення епідуральних ін'єкцій і інших видів ін'єкцій. Переважно, довжина подовженої рукоятки 27 становить приблизно 15 см (приблизно 6 дюймів), або перебуває в переважних межах від приблизно 10 до 20 см, причому трубки 22 мають довжину приблизно 122 см (приблизно 48 дюймів). Кероване тиском ін'єкційне обладнання Згідно з вищенаведеним описом, ін'єкційне обладнання, приклад якого представлений у вигляді приводного блоку 50 на фіг. 2, 3 і 4, використовує переривчастий потік текучого середовища для безперервного контролю тиску за допомогою електронного вимірювального перетворювача 20 тиску, причому зазначений тиск переважно являє собою тиск текучого середовища під час здійснення ін'єкції. На підставі заданого тиску, установленого лікарем і збереженого в запам'ятовувальному пристрої 80 мікропроцесора або комп'ютера 82 електронної частини в блоці 50, потік текучого середовища зупиняють, а на підставі заданого тиску потік текучого середовища відновлюють. Можливий варіант, у якому для обох зазначених режимів використовують один заданий тиск. У такому разі тиск росте до заданого рівня при первісному проникненні текучого середовища в тканину, після чого потік текучого середовища припиняється при зменшенні тиску нижче зазначеного заданого рівня. Потім потік текучого середовища відновлюється з утворенням переривчастого потоку текучого середовища. Винахід має задані рівні тиску для забезпечення потоку текучого середовища в цільові ділянки тканин і обмеження потоку лікарських засобів у нецільові тканини. Це дозволяє лікареві вибірково вводити лікарські засоби на певні ділянки і у цільові тканини при здійсненні діагностичних і терапевтичних процедур. Заздалегідь обрані максимально припустимі границі тиску і/або витрати збережено в запам'ятовувальному пристрої 80 і задають максимальні рекомендовані значення тиску, які пацієнти здатні витримати, або інші критерії. При наближенні тиску до зазначеного приграничного значення, виробляється візуальний і/або звуковий сигнал, що сповіщає лікаря, тобто на екрані 62 і за допомогою динаміка 84, активізуємих при одержанні даних від мікропроцесора 82. Крім того, описові дані всього процесу здійснення ін'єкції зберігають для наступного аналізу в запам'ятовувальному пристрої 80, згідно з вищенаведеним описом. Спосіб здійснення ін'єкцій у наповнений текучим середовищем простір У нижченаведеному описі наведено зразковий спосіб здійснення епідуральної ін'єкції. Зазначені принципи і способи можуть бути легко адаптовані для здійснення ін'єкцій в інші тканини і анатомічні ділянки, крім епідурального простору. Лікар задає першу задану верхню границю тиску. Зазвичай перша задана верхня границя тиску не перевищує 200 мм рт. ст. Передбачено, що при використанні зазначеного параметра 12 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 ін'єкційна система вводить незначний обсяг лікарських засобів у сполучні тканини, а потім шляхом вибору другого заданого тиску нижче 50 мм рт. ст., при якому потік текучого середовища відновлюється. Отже, голка правильно розміщена в наповненому текучим середовищем просторі епідурального простору тканини внаслідок того, що тиск усередині епідурального простору тканини приблизно становить від приблизно +15 мм рт. ст. до -15 мм рт. ст., у той час як тиск, властивий жовтому зв'язуванню, становить вище 200 мм рт. ст. Результати вимірів відомого тиску усередині позазв'язкових тканин зазвичай становлять приблизно 100-200 мм рт. ст. Внаслідок того, що ін'єкційне обладнання 50 має другий заданий тиск, при якому потік текучого середовища відновлюється, тобто 50 мм рт. ст. або нижче, після проникнення голки в підшкірні тканини значного потоку текучого середовища не спостерігають внаслідок того, що тиск швидко росте і зберігається на високому рівні при знаходженні голки в підшкірних тканинах (позазв'язкових тканинах). У відповідності зі стандартним методом здійснення епідуральної ін'єкції, лікар просуває голку Туохі і доводить її до жовтої зв'язки. Потік текучого середовища як і раніше відсутній внаслідок того, що, згідно з вищенаведеним описом, жовта зв'язка тисне понад 100 мм рт. ст. Після проходження через жовту зв'язку (тобто при вході голки в наповнений текучим середовищем епідуральний простір), тиск миттєво зменшується до значення нижче 50 мм рт. ст., що при необхідності приводить до візуального відображення і/або звукового сигналу і/або голосового повідомлення, такого як "Виявлено епідуральний простір", а утримуюче лікарські засоби текуче середовище починає витікати на задану цільову ділянку. Отже, переривчастий потік текучого середовища використовують для визначення цільових тканин. Можливий варіант, у якому перше і друге значення заданого тиску задані ідентичними для забезпечення потоку текучого середовища лише після зменшення тиску до значень нижче заданого значення тиску. Датчик 20 тиску або безліч датчиків тиску ін'єкційного обладнання 50 забезпечують автоматичну функцію безпеки у випадку виходу голки для ін'єкції з епідурального простору тканини (наприклад, внаслідок помилки лікаря або переміщення пацієнта) або у випадку порушення прохідності обладнання. У випадку, якщо голка 24 виходить із епідурального простору тканини шляхом відведення через жовту зв'язку або зіткнення із твердою оболонкою, тиск негайно зростає до значення першого обраного тиску P1, що приводить до вповільнення і підсумковій зупинці потоку текучого середовища при значеннях тиску текучого середовища, що перевищують 200 мм рт. ст. Було виявлено, що зазначений процес займає приблизно 2 секунди (див. Ghelber-Regional Anesthesia and Pain Medicine, том 33, № 4, 2008 р., стор. 349, фіг. 2). При необхідності зазначена зміна тиску від менше 50 мм рт. ст. до понад 200 мм рт. ст. знову приводить до подачі візуального або звукового оповіщення для оповіщення лікаря про некоректне розміщення голки. Потік знову відновлюється автоматично після повторного розміщення голки в епідуральному просторі тканини і зменшення миттєвого значення тиску на кінчику голки до значень нижче P1 або, в іншому прикладі реалізації винаходу, після зменшення тиску до другого обраного значення тиску P1 (рівного або меншого 50 мм рт. ст.). Зазначена автоматична функція безпеки ін'єкційного обладнання допомагає запобігти введенню анестетичного розчину в спинний мозок. На фіг. 9 показана ділянка хребта пацієнта для здійснення епідуральної ін'єкції. Починаючи із зовнішньої ділянки для ін'єкції для кінчика голки 24 ліворуч на фіг. 9, тканини на зазначеній ділянці включають різні шари шкіри, жирової і сполучної тканин 110, за якими розташовано епідуральний простір 112, що є анатомічним простором, що цікавить, у переважному прикладі реалізації винаходу. За епідуральним простором 112 розташована тверда оболонка 114 спинного мозку 116. Очевидно, важливо, щоб переміщення наконечника голки 24 праворуч (згідно із кресленням) через тканини припинялося до досягнення спинного мозку, і зазначена задача вирішена в даному винаході. Також показані поперечні перерізи кісток хребта на зазначеній ділянці. Згідно з винаходом, мікропроцесор 82 і запам'ятовувальний пристрій 80 запрограмовані з першим тиском P1, що становить, наприклад, приблизно 200 мм рт. ст., і обраним таким чином, що воно дорівнює або перевищує миттєве значення тиску текучого середовища на кінчику голки при її проникненні і переміщенні по тканині 110. При тиску, рівному або перевищуючим тиск P1, двигун 96 зупиняють, і потік текучого середовища до кінчика голки припиняється. При проникненні кінчика голки в епідуральний простір, миттєвий тиск текучого середовища зменшується до значення нижче P1, і мікропроцесор заново запускає двигун для поновлення потоку текучого середовища, тепер в епідуральний простір 112 відповідно до одного із прикладів реалізації винаходу. Згідно із другим прикладом реалізації винаходу, для поновлення потоку текучого середовища необхідно, щоб було досягнуто друге обране значення тиску P2, збережене в запам'ятовувальному пристрої 80. У третьому прикладі реалізації винаходу, при 13 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 досягненні збереженого в запам'ятовувальному пристрої 80 третього обраного значення тиску P3, що перевищує значення P2, але меншого відносно значення P1, потік текучого середовища знову зупиняють. Досягнення зазначеного третього значення тиску P3 вказує на те, що кінчик голки вперся у тверду оболонку 114 або іншим чином покинув цільовий анатомічний простір. Простори або шари, через які проходить кінчик голки, корелюють із установками тиску P1, P2 і P3 згідно з винаходом по фіг. 9. Перший обраний тиск P1 для зупинки потоку текучого середовища переважно становить приблизно 200 мм рт. ст. для епідуральної ін'єкції, але може перебувати в межах від приблизно 25 до приблизно 300 мм рт. ст. залежно від тканини, що спочатку проколюється кінчиком голки. Тиск P2 для поновлення потоку текучого середовища переважно становить приблизно 50 мм рт. ст. для епідуральної ін'єкції, але може перебувати в межах від приблизно 20 до приблизно 150 мм рт. ст. залежно від анатомічного простору, що цікавить. Третій обраний тиск P3 для повторної зупинки потоку текучого середовища переважно становить приблизно 125 мм рт. ст. для епідуральної ін'єкції, але може перебувати в межах від приблизно 80 до приблизно 180 мм рт. ст. залежно від анатомічного простору, що цікавить. Використання трьох заданих значень тиску поліпшує керування по типу "потік/немає потоку" у міру переміщення кінчика голки через тканини різних видів для будь-якого наповненого текучим середовищем анатомічного простору, виконаного з можливістю приймання текучого середовища при меншому значенні тиску в порівнянні із тканинами, що оточують анатомічний простір. Ознакою даного ін'єкційного обладнання і супутнього способу є можливість швидко і точно визначити "неправильну втрату опору" або "хибнопозитивний результат" (зазвичай протягом 2-4 секунд). Неправильна втрата опору зазвичай відбувається при використанні стандартного ручного прийому введення шприца з відчуттям втрати опору, а зменшення опору відбувається при проникненні епідуральної голки в кісту або менш щільний простір поза епідурального простору тканини. Відомо, що зв'язка на зазначеній ділянці є менш щільною, і неправильна втрата опору виникає нерідко. Найчастіше суб'єктивна природа зазначеного анатомічного місця розташування може привести лікаря до неправильного переконання в успішному виявленні епідурального простору тканини. При використанні керованої комп'ютером системи доставки лікарських засобів з керуванням тиском, після проникнення голки в подібний простір, голка швидко заповнює простір або натискає на менш щільну тканину за допомогою текучого середовища, і записуваний тиск збільшується до значень вище 200 мм рт. ст., що об'єктивно вказує на "неправильну втрату опору". Подібного результату зазвичай неможливо досягти при використанні стандартного ручного прийому введення шприца або системи, що передбачає безперервний потік лікарських засобів з насоса шприца. У подібних випадках, при виявленні первісної втрати опору, шприц переміщають, і оператор доставляє дозу текучого середовища (уже припинивши суб'єктивний пошук "втрати опору"), відповідно вводячи анестетичний розчин в анатомічне місце розташування поза цільовим епідуральним простором тканини (знову див. Ghelber-Regional Anesthesia and Pain Medicine, том 33, № 4, 2008 р., стор. 350, фіг. 3 являє собою лінійний графік, що демонструє неправильну втрату опору на тимчасовій оцінці приблизно 250 с). Зазначений результат швидше за все пов'язаний із тканиною зв'язок, обмірюваної під час здійснення епідуральної ін'єкції. Структура невірної тканини була швидко піддана впливу тиску з відображенням обмірюваного значення тиску текучого середовища понад 200 мм рт. ст. Введення катетера в епідуральний простір і наступна ін'єкція текучого середовища не приводять до значного і швидкого росту тиску, що вказує на правильне розташування катетера. Передбачено, що для визначення епідурального простору тканини під час фази розміщення голки процедури епідуральної ін'єкції використовують текуче середовище, що не містить фармацевтичні засоби. Підходящі текучі середовища, що не містять фармацевтичні засоби, включають, наприклад, стерильний фізіологічний розчин, штучну цереброспинальну рідину, розчин Рінгера, 5 % розчин декстрози або відфільтроване повітря. Після визначення епідурального простору тканини за допомогою різниці тисків, текуче середовище для ін'єкції заміняють текуче середовище, що містить фармацевтичні засоби. Використання текучого середовища, що не містить фармацевтичні засоби, під час фази розміщення голки дозволяє мінімізувати або запобігти введенню фармацевтичних засобів у нецільові тканини. Іншою ознакою справжнього обладнання і методології є об'єктивна сутність тиску, що вимірюється керованим комп'ютером обладнанням доставки лікарських засобів, причому контроль тиску здійснюють під час усіх фаз процесу здійснення ін'єкції. Відповідно, лікар більше не покладається на суб'єктивне "відчуття", а одержує об'єктивні дані абсолютних значень при виконанні кожної з фаз зазначеного найважливішого прийому. 14 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 Переваги при виконанні кожної з фаз прийому забезпечені завдяки можливості безперервного контролю тиску при використанні переривчастого потоку лікарських засобів, що дозволяє вносити зміни, що забезпечують кращу безпеку і ефективність виконання ін'єкції. В іншому прикладі лікар може заново встановлювати задане максимально припустиме значення тиску після проникнення голки в наповнений текучим середовищем простір і початку здійснення ін'єкції. Згідно з вищенаведеним описом, до проникнення голки в епідуральний простір тиск текучого середовища становить понад 200 мм рт. ст., у результаті чого доставляється незначний обсяг текучого середовища (або не доставляється зовсім). Після проникнення голки в наповнений текучим середовищем простір тиск зменшується до значень нижче нуля і поступово росте до значень в 1-10 мм рт. ст. Зменшення тиску запускає потік текучого середовища з ін'єкційного обладнання. На цьому етапі максимальне задане значення тиску може бути змінене на нове, менше максимальне значення. Наприклад, заданий максимальний тиск, при якому потік текучого середовища припиняється, може бути зменшений до 25 мм рт. ст., що забезпечує додатковий рівень безпеки для пацієнта у випадку контакту голки для ін'єкції із твердою оболонкою або відведення голки з епідурального простору. Новий (менший) заданий максимальний тиск приводить до більш ранньої зупинки потоку текучого середовища з меншим об'ємом текучого середовища, що вводиться в нецільові тканини, у порівнянні з вихідним заданим значенням. Зміна заданого максимального тиску, що зупиняє потік текучого середовища, може бути здійснена лікарем вручну або автоматично за допомогою керуючого елемента в ін'єкційному обладнанні. Слід розуміти, що приклад значення в 200 мм рт. ст. у якості заданого максимального тиску для зупинки потоку текучого середовища наведений винятково в ілюстративних цілях, і може бути обраний більший або менший заданий тиск на розсуд лікаря. Крім того, друге задане значення тиску в 50 мм рт. ст., при якому потік текучого середовища відновлюється, наведено винятково в ілюстративних цілях, і може бути обраний більший або менший заданий тиск на розсуд лікаря. Принципи і прийоми можуть бути модифіковані для здійснення ін'єкції в майже будь-яке анатомічне місце розташування. Особливо важливим фактором у даному прикладі реалізації способу і обладнання є можливість задавати і вибирати задані значення тиску для забезпечення переривчастого потоку лікарських засобів для здійснення діагностичного або терапевтичного введення засобів. Розкриті в даному описі прийоми рівною мірою застосовні до тканин людини і тварин. Переривчастий потік текучого середовища з однією або більшою кількістю окремих границь тиску в комбінації з автоматичним визначенням аспірації текучого середовища При підготовці до використання блоку 50, і з посиланням на фіг. 1, 2 і 3, вузол 10 одноразових елементів по фіг. 1 виймають зі стерильного впакування, а заздалегідь наповнений корпус 18 шприца втискають у напівциліндричне гніздо 52 для шприца, виконане у верхній поверхні корпуса блоку 50 згідно фіг. 2 і 3. Корпус 18 шприца щільно і нерухомо втримують у гнізді 52 за допомогою двох пружинних затискачів 54, а осьове переміщення корпуса шприца обмежене за допомогою пальцевого фланця 90, що проходить до верхнього кінця шприца 18 і взаємодіючого з виступом 55 для пальцевого фланця відповідної форми. Поршень 70 шприца 18, що перебуває в повністю витягнутому положенні, у якому шприц повністю заповнений (див. фіг. 2), розміщено у вижолобку 56 для поршня у верхній поверхні корпуса блоку, причому вижолобок має достатню довжину, ширину і глибину для розміщення і підвішування поршня 70 без зіткнення з ним, у результаті чого поршень може бути безперешкодно вжатий у корпус шприца. Рухлива платформа 58 із трьома пружинними фланцевими засувками або зачепами 60, установленими на платформі 58 з можливістю повороту, виконана з можливістю переміщення під управлінням комп'ютера уздовж вижолобка 56 для поршня. Відповідно нижчеподаному більш докладному опису, платформу 58 переміщають вправо на фіг. 2 і 3 доти, поки платформа 58 не буде розташована досить близько до фланця 72 шприца 18, для забезпечення взаємодії звернених скошених поверхонь трьох зачепів 60 із фланцем 72 знизу і з його протилежних сторін, для розширення під впливом триваючого переміщення платформи 58, і наступного защеплювання на ділянці під фланцем 72. Потім датчик у блоці 50 вимірює опір подальшому переміщенню платформи 58, а платформа зупиняється. Внаслідок того, що в цім положенні поршень 70 по суті прикріплений в осьовому напрямкові до платформи 58 внаслідок зачеплення засувок 60 за фланець 72, будь-яке подальше переміщення платформи 58 уліво або вправо також приводить до переміщення поршня 70 вправо, тобто для виведення текучого середовища з корпуса шприца, або вліво для аспірації текучого середовища назад у корпус шприца. Датчик 20 тиску вузла 10 підключено до спеціального з'єднувача 12, а з'єднувач 12 підключено до блоку 50 за допомогою штекера 30. 15 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 Згідно з вищенаведеним описом, даний винахід відноситься до системи виявлення цільової ділянки і ведення з використанням переривчастого потоку текучого середовища з однією або більшою кількістю (або " більш ніж з однією") границь значень тиску і до системи автоматичного визначення аспірації. Система складається із приводного блоку 50 і компонентів 10 одноразового користування. Приводний блок 50 містить мікропроцесор або центральний блок 82 обробки даних (CPU), електронну друковану плату 92, джерело 94 живлення і електронний двигун або двигуни 96 (внаслідок того, що в прикладі реалізації по фіг. 4 можуть бути використано два шприци). Кожний електронний двигун 96 повертає спіральний вал 98, що переміщає арматури 100 шприца в напрямку вперед і назад. Арматура 100 шприца містить тензодатчик для виявлення зусилля. Арматуру 100 з'єднано із платформою 50 для її переміщення в кожному із зазначених напрямків. Крім того, згідно з вищенаведеним описом, одноразовий набір 10 містить інноваційний компонент 12 ідентифікації і зв'язки, шприц 18, вбудований вимірювальний перетворювач 20 тиску, набір трубок 22 і голку 24. Докладний опис послідовності робочих операцій На виді зверху інструмента показана порожнина 52 і вижолобок 56, у комбінації називані гніздом шприца, що забезпечують правильне розміщення в ньому стандартного шприца 18 3 об'ємом 20 см . Усередині вижолобка 56 для поршня розташована рухлива арматури 100 і платформа 58, взаємодіюча з упором або фланцем 72 для великого пальця руки одноразового шприца 18. Механізм, що зачіпає упор шприца, містить ряд пружинних зачепів 60, показаних у збільшеному виді на фіг. 5A і автоматично захоплюючих упор шприца для великого пальця руки. Згідно фіг. 5B, при зачепленні упору 72 для великого пальця руки пружинні зачепи 60 переміщаються назовні, поверх, і потім зачіпають упор для великого пальця руки у вигляді зачепу. Зазначена дія дозволяє зафіксувати упор для великого пальця руки згідно фіг. 5C, що дозволяє платформі 58 здійснювати механічне переміщення поршня 70 шприца в кожному із зазначених напрямків (переміщення назад показане на фіг. 5D), забезпечуючи можливість здійснення аспірації. Крім того, у конструкцію арматури 100 шприца вбудований датчик зусилля. Арматура 100 шприца використовує оптичні і механічні ознаки для ідентифікації положення шприца і може розрахувати об'єм текучого середовища, що присутній усередині шприца. Етап 1: Приводний блок 50 приводять у положення "Вкл" за допомогою окремої бічної панелі 64, найкраще показаної на фіг. 6 і містить кнопки "Вкл/Викл", "Старт/Стоп", "Прочищення" і "Аспірація Вкл/Викл", а також індикатори заряду батареї. Кнопка "Вкл/Викл" забезпечує енергією приводного блоку і інтерфейс 62 сенсорного РК-дисплея. Подача потужності автоматично переводить механізм 100 арматури шприца в "вихідне" положення по фіг. 3. Згідно фіг. 3, арматура 100 шприца з рухливою платформою 58 шприца із приймачем упору 52, 56 для великого пальця руки для автоматичного запуску аспірації з'єднана з рухливою арматурою шприца, розташованою на верхній частині приводного блоку. На верхній частині приводного блоку показана конструкція, тобто гніздо для шприца, виконане з фіксаторами або затисками 54 на поверхні. Зазначені фіксатори 54 взаємодіють із поверхнею циліндра шприца 18 з інтерфейсом при розміщенні шприца усередині гнізда для шприца для забезпечення тимчасового запирання шприца в гнізді для шприца. Етап 2: Приводний блок 50 вимагає використання ряду одноразових компонентів. Згідно з вищенаведеним описом, одноразовий набір 10 по фіг. 1 містить нижчеописані компоненти системи. Шприц 18 - у переважному прикладі реалізації використаний стандартний шприц об'ємом 20 3 см виробництва Becton Dickinson, Inc. Конструкція не обмежена можливістю використання шприца зазначеного розміру або об'єму. Оператор заповнює шприц текучим середовищем з відповідного стерильного контейнера, такого як багатодозний флакон або одноразова скляна ампула. Оператор може повністю заповнити шприц або частково заповнити шприц, причому функція автоматичного визначення визначає обсяг лікарських засобів, що міститься в шприці. У переважному прикладі реалізації використано вбудований вимірювальний перетворювач 20 тиску, такий як вбудований вимірювальний перетворювач тиску "Meritrans®» компанії Merit Medical, Саут-Джордан, Юта. Передбачено, що датчик зусилля в арматурах шприца може надавати дані про тиск текучого середовища, у результаті чого немає необхідності у використанні вторинного датчика тиску. Підшкірна порожня голка 24 - у переважному прикладі реалізації використана голка Туохі, така як голка Туохі Becton Dickinson 20G x 3.5" від компанії Becton Dickinson, Франклін Лейкс, Нью-Джерсі. 16 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 Набір 22 стерильних трубок - 48-дюймові трубки для вимірювання артеріального тиску від ICU Medical, Inc., Сан-Клементе, Каліфорнія. Одноразовий з'єднувач (ID-з'єднувач) 12 для ідентифікації - ID-з'єднувач являє собою спеціальний компонент і є частиною розкритого в даному описі винаходу. ID-з'єднувач підтверджує, що із приводним блоком зв'язані належні і рекомендовані виготовлювачем шприц, набір трубок, вбудований датчик тиску і голка. У переважному прикладі реалізації ID-з'єднувач нерознімно прикріплений до датчика тиску і набору трубок, і наданий у вигляді єдиного компонента. Також можливий варіант, у якому винахід містить усі одноразові елементи, надані у вигляді індивідуального набору, що дозволяє операторові з'єднувати ID-з'єднувач із окремими компонентами для використання обладнання. Потім ID-з'єднувач з'єднують із приводним блоком за допомогою знімного сполучного штепселя 30, такого як штепсель RJ-11 по фіг. 1 і фіг. 7. Передбачена можливість використання електричного з'єднання, відмінного від штепселя RJ-11. Може бути виготовлений оригінальний електронний штепсель. Передбачена можливість використання в ID-з'єднувачі будь-яких і всіх інших засобів передачі і з'єднання зі ЦП приводного блоку, включаючи, без обмеження, інфрачервоний зв'язок, зв'язок Wi-Fi, зв'язок по протоколу Bluetooth або інші бездротові засоби. Передбачено, що підтвердження одноразового вузла може також бути виконане з використанням маркування, включаючи штрих-код і зчитувач штрих-коду або будь-які інші оптичні засоби виявлення. ID-з'єднувач з'єднаний зі ЦП приводного блоку для передачі даних, пов'язаних з одноразовими елементами. У переважному прикладі реалізації ID-з'єднувач обмежує кількість циклів можливої роботи приводного блоку з одноразовим набором. Зазначена функція може обмежувати використання на підставі фізичного циклу приводного блоку і/або на підставі виміряного часу. Крім того, функція запобігає повторному використанню раніше використаних або нестерильних одноразових елементів, забезпечуючи безпеку пацієнта. ID-з'єднувач також забезпечує належний вибір одноразових компонентів. У переважному прикладі реалізації IDз'єднувач нерознімно з'єднаний з найбільшою можливою кількістю одноразових компонентів, тобто за допомогою клею, термічного зв'язку або хімічного зв'язку, із вбудованим датчиком тиску і набором трубок. Проте, зазначена конфігурація не є необхідною для належної роботи блоку. Передбачена можливість шифрування додаткових даних в ID-з'єднувачі, таких як, без обмеження: Дані про лікарські засоби, такі як назва засобу і технологія приготування, виробник засобу, номер партії; Дані, що стосуються вузлів одноразових елементів; Дані, що стосуються строку зберігання лікарських засобів; Дані, що стосуються стерильності одноразового набору; і Дата і час використання ID-з'єднувача. 3 У переважному прикладі реалізації шприц 18 об'ємом 20 див з'єднано з вимірювальним перетворювачем 20 Meritans із прикріпленим ID-з'єднувачем і набором 22 48-дюймових трубок для вимірювання артеріального тиску. На дистальному кінці набору трубок приєднана голка 24 Туохі (порожня) згідно фіг. 1, 2 і 7. Етап 3: Після введення шприца 18 у приймач для шприца, оператор переглядає початковий екран 62 з повідомленням "Завантажте шприц і натисніть "Продовжити"" на приводному блоці 50. Інтерфейс 62 сенсорного екрана дозволяє операторові нажати на кнопку "Продовжити", що забезпечує зіткнення приймача аспірації автоматичного зачеплення з упором шприца для великого пальця руки. Див. фіг. 8B. Приводний блок може виявляти і підтверджувати введення належних одноразових елементів в інструмент за допомогою ряду ознак. Конструктивні ознаки підтвердження включають: 1. Унікальний детектор-з'єднувач ідентифікації (ID-з'єднувач), виконаний з можливістю з'єднання з ЦП для підтвердження вибору і прикріплення до приводного блоку належного вузла одноразових елементів. У випадку виявлення ID-з'єднувачем невірного вибору одноразового вузла або спроби повторного використання одноразового вузла, приводний блок запобігає подальшій роботі і відображає попереджувальне повідомлення і/або видає звуковий сигнал. IDз'єднувач також виконаний з можливістю обмеження кількості циклів, виконуваних з використанням одного одноразового набору. ID-з'єднувач керує системою і працює безпосередньо і/або опосередковано через ЦП. Дані передають на з'єднувач або від нього в обох напрямках, і отже, ЦП може зберігати або змінювати вміст і дані на ID-з'єднувачі під час роботи. 17 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 2. Ознака автоматичного виявлення шприца використовує утримуючі зачепи приймача аспірації автоматичного зачеплення для підтвердження вибору шприца належного розміру. Підтвердження встановлюють на основі розміру упору шприца для великого пальця руки і діаметра між зачепами приймача аспірації автоматичного зачеплення. У випадку, якщо розмір шприца і розмір приймача не збігаються, зачепи не здатні зачіпати упор для великого пальця руки. Завантажений шприц спочатку виявляють за допомогою арматури шприца приводного блоку, що містить тензодатчик. Переміщення арматури шприца наперед автоматично зупиняють при виявленні опору на упорі шприца для великого пальця руки. Після зачеплення зачепами, що приводяться пружинами, упору шприца для великого пальця руки, арматури шприца змінює напрямок руху на протилежний. У переважному прикладі реалізації при використанні упору для великого пальця руки меншого діаметра для шприца розміру, відмінного 3 від шприца об'ємом 20 см , зачіпляючі зачепи не зачіпають упор для великого пальця руки, і шприц не буде виявлено. Система відображає попереджувальне повідомлення або видає звуковий сигнал, і запобігає подальшому використанню приводного блоку. Передбачена можливість включення різних заданих розмірів шприців у конкретні конструкції, наприклад, 3 3 шприца об'ємом 10 см або шприца об'ємом 5 см . Ознака автоматичного виявлення шприца також визначає об'єм текучого середовища усередині шприца за допомогою оптичного і/або механічного датчика. Об'єм відображають на дисплеї. Після завершення і підтвердження виявлення шприца, система може автоматично промивати набір трубок відповідним об'ємом текучого середовища для повної зарядки одноразового елемента. 3. У переважному прикладі реалізації ознаку автоматичного прочищення активізують після виконання ознаки автоматичного виявлення шприца. Зазначена операція дозволяє переконатися в тому, що в приймач шприца встановлений належний шприц. Забезпечена можливість зміни глобальної установки, у результаті якого автоматичне прочищення не виконується, і в цьому випадку може бути використана опція ручного прочищення, доступна за допомогою сенсорного дисплея. Також може бути забезпечений варіант, у якому етап прочищення опущений. Процес "автоматичного прочищення" або "ручного прочищення" може бути опущений у випадку, якщо набір одноразових елементів шприца використовують багаторазово для здійснення ін'єкції одному пацієнтові, і в цьому випадку набір трубок уже заряджений у результаті виконаного першого циклу прочищення. Див. фіг. 8A. На правому краї сенсорного дисплея по фіг. 8C показаний ряд сенсорних закладок, доступ до яких може бути отриманий у будь-який момент під час роботи. 1 - Екран "Пацієнт": Дозволяє вводити дані про пацієнта або лікаря. 2 - Екран "Виявлення": Активний екран ін'єкції, на якому показано візуальне відображення витрати і тиску текучого середовища протягом процесу здійснення ін'єкції, що дозволяють операторові виявити мету. На екрані також показані значення P1 і P2. 3 - Екран "Установки": Дозволяє змінювати значення витрати і тиску, значення P1 і значення P2 тиску. Може бути обрана яскравість екрана і гучність звуку. Додаткові установки включають "Калібрування Екрана" (регулювання чутливості сенсорного дисплея), установку дати і часу і установку "Автоматичне прочищення Вкл/Викл". 4 - Екран "Дані": Забезпечує можливість огляду, електронної передачі і печатки даних, зібраних під час попередніх операцій по виявленню простору для здійснення ін'єкції. Доступ до екрана пацієнта одержують шляхом натискання на закладку "Пацієнт" на правій стороні екрана. Слід зазначити, що оператор може перемикатися між будь-якими з екранів під час роботи за допомогою простого натискання на закладку на правій стороні екрана. При натисканні на закладку "Пацієнт" система відображає екран (показаний на фіг. 8C), на якому оператор може вводити дані про пацієнта і лікаря, які будуть збережені з відміткою дати і часу для пацієнта. Див. фіг. 8C і фіг. 8D. Згідно фіг. 8E, екран установок відображає наступні установки, які може регулювати користувач: 1. "Яскравість" дозволяє збільшувати або зменшувати яскравість екрана. Після здійснення вибору зазначене значення відтворюється надалі за замовчуванням. 2. Коректування гучності звуку для регулювання гучності звуку під час роботи. 3. Калібрування екрана дозволяє регулювати чутливість сенсорного дисплея для зручності операторів, що використовують захисну плівку і/або працюючих у рукавичках. 4. Установка дати і часу для регулювання дати і часу. 5. Значення витрати для регулювання обраної швидкості. 18 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 55 60 6. Границя тиску - значення P1. Значення P1 являє собою тиск, при якому потік текучого середовища припиняється, але результати вимірів тиску як і раніше записуються, відображаються і озвучуються. 7. Границя тиску - Старт - значення P1. Значення P2 являє собою тиск, при досягненні якого потік текучого середовища відновлюється. У переважному прикладі реалізації значення P1 і значення P2 різні. Значення P2 має бути менше значення P2, що дозволяє забезпечити тиск (значення P1), при якому потік текучого середовища припиняється після досягнення первісної границі значення тиску. Потік текучого середовища відновлюється при визначенні тиском другого, більш низького значення тиску, заданого у вигляді значення P2. Проте, можливий варіант, у якому значення P2 може також бути вище значення P1, і в цьому випадку потік текучого середовища відновлюється лише при збільшенні тиску до значення нової границі тиску. Оператор може вибрати однакове значення P1 і P2. На фіг. 8F показаний екран з даними, що відображає дані про пацієнта і дані про лікаря і, що зберігає запис місця розташування і події ін'єкції. Зазначені дані можуть бути збережені на знімному носії і/або безпосередньо роздруковані на принтері із приводного блоку. Екран виявлення забезпечує надзвичайно важливу інформацію під час процесу виявлення і здійснення ін'єкції при проведенні процедури, і показаний на фіг. 8G. На кресленні показаний активний екран режиму "Виявлення", розглянутий під час роботи. Безпосередньо із зазначеного екрана може бути здійснений доступ до нижченаведених функцій сенсорного дисплея: 1. Кнопка "Старт"/"Стоп" для запуску потоку і зупинки потоку текучого середовища вручну. 2. Функція "Перерахування тиску": Дозволяє системі відняти невірний результат вимірювання тиску внаслідок невідповідностей по висоті над рівнем моря або по висоті між пацієнтом або інструментом. 3. "Завершення лікування" переводить користувача до вікна прочищення для завантаження нового набору шприца для нового пацієнта або забезпечення використання другого шприца для першого пацієнта. 4. "Залишок об'єму" представлений у вигляді графічного зображення шприца. У міру виведення текучого середовища зі шприца графічне зображення змінюється, відбиваючи зміну об'єму текучого середовища в шприці. 5. "Тиск" представлений в міліметрах ртутного стовпа в реальному часі під час операції. 6. Використовувана об'ємна витрата. 7. Графік, що відображає результати вимірів тиску у вигляді графіка. 8. Чутний звуковий сигнал, що відбиває значення тиску і потоку текучого середовища. 9. Значення P1, P2 (якщо використане) і P3 (якщо використане) представлені на графіку на екрані. P2 відзначене як нижня границя тиску, представлена у вигляді виділеної кольором горизонтальної лінії на графіку. 10. "Печатка" - оператор може роздрукувати дані і супутній графік з даного екрана. 11. На екрані відображені час і дата. 12. Графік, що біжить - займає більшу частину екрана і являє собою візуальне відображення записуваних даних про витрату і тиск. Ці дані видаються користувачеві у вигляді звукового оповіщення або сигналу, у результаті чого оператор не має необхідності постійно дивитися на екран. Клінічний задум переривчастого потоку текучого середовища з безліччю окремих значень границі тиску Важливо встановити окрему першу верхню границю тиску, задану у вигляді першого обраного тиску P1, для зупинки потоку текучого середовища. Це дозволяє обмежити об'єм текучого середовища, що вводиться, під час процесу визначення наповненого текучим середовищем простору в тканині. Зазначена ознака є перевагою щодо рівня техніки внаслідок того, що вона дозволяє запобігти безперервному потоку текучого середовища в тканині, який може привести до небажаних наслідків. Для виявлення наповненого текучим середовищем анатомічного простору, такого як епідуральний простір або міжсуглобний простір, у рівні техніки була використана система з безперервним потоком текучого середовища: у патентах, виданих Тімо Лехнеру (Timo Lechner) (патент США № 7,922,689) і Тіму Патрику (Tim Patrick) (патент США № 8,002,736). При використанні зазначених інструментів оператор повинен уводити текуче середовище в тканині на безперервній основі для визначення тканин на підставі тиску. Недолік зазначених патентів полягає в необхідності безперервного потоку текучого середовища під час безперервного процесу визначення тиску і ідентифікації анатомічної ділянки або структури. Безперервний потік 19 UA 114629 C2 5 10 15 20 текучого середовища здатний: 1) викликати ушкодження тканин у результаті надання надмірного тиску на тканині; 2) підвищити тиск у тканині, що приводить до виникнення помилкового фактора і помилок при вимірюванні тиску в тканинах, результатом чого є невдале виконання необхідної дії; 3) викликати надмірні болючі відчуття під час операції і після операції; 4) при надмірному використанні лікарських засобів і текучих середовищ у тканині, можуть виникати небажані реакції пацієнтів на зазначені засоби. Відповідно, система, у якій використана система переривчастого потоку текучого середовища, виконана з можливістю зворотного зв'язку і передачі даних про тиск у реальному часі, відмінна від відомих з рівня техніки винаходів. Можливість установки безлічі заданих значень тиску, відмінних від P1, забезпечує засобу виявлення мети з низьким тиском на анатомічній ділянці без уведення додаткового текучого середовища. У зазначеному процесі потік текучого середовища використовують як параметри виявлення для визначення заданої анатомічної ділянки в тілі пацієнта. Даний винахід дозволяє виконати обладнання для виявлення, що використовує систему для текучого середовища під тиском і з переривчастим потоком текучого середовища на підставі безлічі значень границі тиску. Даний винахід відмінний від технології CompuFlo, раніше представленої в патенті США № 7,449,008, Хохман (Hochman). Незважаючи на те, що даний винахід описаний з посиланням на безліч конкретних прикладів реалізації, слід розуміти, що зазначені приклади реалізації наведені винятково в якості ілюстрації принципів винаходу. Відповідно, описані приклади реалізації повинні вважатися наведеними винятково як приклад і такими, що не обмежують обсяг винаходу, заданий у нижченаведеній формулі винаходу. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 60 1. Апарат для введення текучого середовища в наповнений текучим середовищем анатомічний простір, виконаний з можливістю приймання текучого середовища при тиску, який менше тиску тканин, що оточують анатомічний простір, який містить: - вузол одноразових елементів, що містить: шприц, що має основну частину для розміщення текучого середовища, призначений для введення шляхом ін'єкції в анатомічний простір і що містить поршень, виконаний з можливістю переміщення в одному кінці основної частини для дозованої подачі текучого середовища з протилежного кінця основної частини, трубки, які нерознімно з'єднані з протилежним кінцем основної частини, голку, з'єднану з трубками, яка має кінчик, виконаний з можливістю введення у пацієнта та з можливістю переміщення через тканини, що оточують анатомічний простір, для пошуку цього анатомічного простору, та вбудований у лінію датчик тиску для створення сигналу, що відповідає миттєвому значенню тиску на кінчику голки, - привідний блок, механічно з'єднаний зі шприцом й електрично з'єднаний з датчиком тиску, причому привідний блок містить керуючий пристрій з комп'ютером, запам'ятовувальний пристрій для зберігання першого вибраного тиску (Р1), який вибрано таким чином, що він відповідає ін'єкції текучого середовища в наповнений текучим середовищем анатомічний простір, і другого вибраного тиску (Р2), який нижче, ніж перший вибраний тиск (Р1) на першу вибрану величину, двигун, з'єднаний з комп'ютером і керований ним, і арматуру шприца, з'єднану з двигуном і механічно з'єднану зі шприцом для переміщення поршня в основну частину та з неї відповідно для ін'єкції й аспірації текучого середовища на кінчику голки із забезпеченням ін'єкції текучого середовища у пацієнта й аспірації текучого середовища з пацієнта, і - комп'ютер запрограмований з можливістю керування двигуном для переміщення поршня із забезпеченням переривчастого потоку текучого середовища у пацієнта доти, поки перший вибраний тиск (Р1) не буде зареєстровано датчиком тиску, після чого двигун припиняє роботу для зупинки потоку додаткового текучого середовища у пацієнта доти, поки миттєве значення тиску на кінчику голки не зменшиться до значення, яке менше першого вибраного тиску, після чого програма відновлює роботу двигуна для поновлення потоку текучого середовища у пацієнта, так що у міру переміщення голки у тканинах пацієнта, оточуючих наповнений текучим середовищем анатомічний простір, потік текучого середовища в тканині припиняється при миттєвих значеннях тиску, що перевищують перший вибраний тиск (Р1), і відновлюється, коли миттєве значення тиску зменшується до значення другого вибраного тиску (Р2), для наступного поновлення ін'єкції текучого середовища в зазначений анатомічний простір. 2. Апарат за п. 1, у якому запам'ятовувальний пристрій також зберігає третій вибраний тиск (Р3), значення якого менше значення першого вибраного тиску (Р1) і більше значення другого вибраного тиску (Р2), а комп'ютер запрограмований з можливістю повторної зупинки двигуна 20 UA 114629 C2 5 10 15 20 25 30 35 40 45 50 для припинення переміщення поршня із забезпеченням повторної зупинки потоку текучого середовища до кінчика голки, коли миттєве значення тиску досягає значення третього вибраного тиску (Р3) після досягнення ним значення другого вибраного тиску (Р2). 3. Апарат за п. 1, у якому керуючий пристрій містить засоби введення для одержання щонайменше одного параметра, включаючи щонайменше перший вибраний тиск (Р1). 4. Апарат за п. 2, у якому керуючий пристрій містить засоби введення для одержання множини параметрів, що містять щонайменше один із першого, другого та третього вибраних тисків (P1, P2, Р3). 5. Апарат за п. 1, у якому перший вибраний тиск (Р1) становить від приблизно 25 мм рт. ст. до приблизно 300 мм рт. ст. 6. Апарат за п. 1, у якому другий вибраний тиск (Р2) становить від приблизно 25 мм рт. ст. до приблизно 100 мм рт. ст. 7. Апарат за п. 2, у якому третій вибраний тиск (Р3) становить від приблизно 80 мм рт. ст. до приблизно 180 мм рт. ст. в залежності від анатомічного простору, перший вибраний тиск (Р1) становить від приблизно 80 мм рт. ст. до приблизно 300 мм рт. ст. залежно від анатомічного простору, а другий вибраний тиск (Р2) становить від приблизно 20 мм рт. ст. до приблизно 100 мм рт. ст. залежно від анатомічного простору. 8. Апарат за п. 3, у якому зазначений щонайменше один параметр вибраний з групи, що складається з: довжини ін'єкційних трубок, внутрішнього діаметра ін'єкційних трубок, в'язкості текучого середовища для ін'єкції, складу текучого середовища для ін'єкції та температури текучого середовища для ін'єкції. 9. Апарат за п. 1, у якому датчик тиску вбудований у лінію з нероз'ємним з'єднанням між протилежним кінцем шприца та трубками. 10. Апарат за п. 1, у якому привідний блок містить корпус із порожниною для шприца для втримання основної частини шприца в зафіксованому осьовому положенні на корпусі та з можливістю знімання з корпусу, і виїмку для поршня, який виконаний з можливістю вільного переміщення, арматуру шприца, що містить платформу, виконану з можливістю переміщення вздовж виїмки для поршня, причому поршень містить упор для великого пальця руки, платформа містить щонайменше один установлений з можливістю повороту пружинний зачіп для зчеплення з упором для великого пальця руки, коли платформа переміщена для зчеплення з упором для великого пальця руки, із забезпеченням осьового з'єднання платформи з упором для великого пальця руки таким чином, що переміщення платформи у протилежних напрямках забезпечує переміщення поршня у протилежних напрямках, арматура шприца містить датчик для вимірювання величини переміщення платформи для зчеплення з упором для великого пальця руки, а комп'ютер запрограмований з можливістю зупинки переміщення платформи під впливом датчика, коли платформа приведена у зчеплення з упором для великого пальця руки. 11. Апарат за п. 1, що містить спеціальний з'єднувач, який електрично та механічно приєднаний між датчиком тиску і керуючим пристроєм для забезпечення роботи керуючого пристрою тільки у випадку, якщо штатний вузол одноразових елементів з'єднаний з датчиком тиску. 12. Апарат за п. 1, у якому кінчик голки виконаний з можливістю введення в один з наступного: простір в епідуральній тканині, міжсуглобний простір; внутрішньоочну рідину очного яблука; судину тіла та простір у тканині, що складається в основному з біологічних текучих середовищ. 13. Апарат за п. 12, у якому голка являє собою голку катетера. 14. Апарат за п. 1, у якому текуче середовище для ін'єкції містить лікарські засоби. 15. Апарат за п. 1, що додатково містить візуальний сигнал, який керований керуючим пристроєм і вказує на кожний запуск або зупинку потоку текучого середовища. 16. Апарат за п. 1, що додатково містить генератор звукового сигналу, який керований керуючим пристроєм і створює звукове оповіщення при кожному пуску або зупинці потоку текучого середовища. 17. Апарат за п. 1, у якому вузол одноразових елементів містить тверду подовжену рукоятку, нерознімно з'єднану з трубками для забезпечення з'єднання з голкою, причому рукоятка має довжину від приблизно 10 до 20 см. 21 UA 114629 C2 22 UA 114629 C2 23 UA 114629 C2 24 UA 114629 C2 25 UA 114629 C2 26 UA 114629 C2 27 UA 114629 C2 28
ДивитисяДодаткова інформація
Назва патенту англійськоюDrug infusion with pressure sensing and non-continuous flow with indentification of and injection into fluid-filled anatomic spaces
Автори англійськоюHochman, Mark, N.
Автори російськоюХохман Марк Н.
МПК / Мітки
МПК: A61M 5/00, A61M 31/00, A61M 5/145
Мітки: лікарських, ін'єкції, ідентифікації, вимірюванням, тиску, анатомічних, потоком, забезпечення, переривчастим, середовищем, наповнених, засобів, них, текучим, введення, просторів
Код посилання
<a href="https://ua.patents.su/31-114629-vvedennya-likarskikh-zasobiv-z-vimiryuvannyam-tisku-i-pererivchastim-potokom-dlya-identifikaci-napovnenikh-tekuchim-seredovishhem-anatomichnikh-prostoriv-i-dlya-zabezpechennya-v-ni.html" target="_blank" rel="follow" title="База патентів України">Введення лікарських засобів з вимірюванням тиску і переривчастим потоком для ідентифікації наповнених текучим середовищем анатомічних просторів і для забезпечення в них ін’єкції</a>
Пристрій і спосіб спорожнювання й промивання наповнених текучим середовищем ємностей
Номер патенту: 110832
Опубліковано: 25.02.2016
Автори: Губер Роберт, Вегкамп Хайнц-Герд
Мітки: ємностей, пристрій, спосіб, спорожнювання, середовищем, текучим, промивання, наповнених
Формула / Реферат:
1. Пристрій для спорожнювання й промивання наповнених текучим середовищем ємностей (1), який має:- приймальний вузол (4) для приймання ємностей (1), при цьому приймальний вузол (4) містить поворотний пристрій, за допомогою якого ємність (1) після установки в приймальний вузол (4) можна повертати на заданий кут,- розвантажувальний вузол, що містить розвантажувальну лінію (9), з'єднану з розвантажувальною лінією (9) муфту (8) для...
Спосіб інтраартикулярного введення лікарських засобів у скронево-нижньощелеповий суглоб
Номер патенту: 66162
Опубліковано: 26.12.2011
Автори: Мигович Ігор Мирославович, Пішковці Ярослав Ярославович, Пішковці Марта Ярославівна, Мигович Мирослав Іванович
МПК: A61C 7/00, A61K 31/00, A61M 5/00
Мітки: суглоб, лікарських, скронево-нижньощелеповий, інтраартикулярного, спосіб, засобів, введення
Формула / Реферат:
Спосіб інтраартикулярного введення лікарських засобів у скронево-нижньощелеповий суглоб, що включає визначення положення суглобової головки, на відстані 1 см допереду від козелка вуха, здійснення проколу голкою до поверхні суглобової головки, який відрізняється тим, що після визначення положення суглобової головки та точки уколу по трагоорбітальній лінії, на відстані 1 см до переду від козелка вуха, при напіввідкритому роті, який фіксують...
Зонд для промивання порожнистих органів і введення лікарських засобів
Номер патенту: 10321
Опубліковано: 15.11.2005
Автори: Вільцанюк Ірина Олександрівна, Кляритська Ірина Львівна
МПК: A61M 27/00
Мітки: зонд, лікарських, засобів, промивання, порожнистих, введення, органів
Формула / Реферат:
Зонд для промивання порожнистих органів і введення лікарських засобів, який складається з трубки зовнішньої аспірації та трубки внутрішньої іригації, який відрізняється тим, що на трубці зовнішньої аспірації виконано отвори, які сполучають її з зовнішнім середовищем, а в її стінці утворено канал внутрішньої іригації, який розташований спірально з отворами по зовнішній поверхні трубки, причому кінці трубки та каналу мають вихідні отвори.
Пристрій для введення лікарських засобів з автоматичним відведенням шприца після ін’єкції
Номер патенту: 103228
Опубліковано: 25.09.2013
Автори: Мейсон Брайан Джозеф, Джеймс Адріан Бентон, Макелані Крістін Вей Хсієн
МПК: A61M 5/32
Мітки: автоматичним, шприца, ін'єкції, введення, лікарських, засобів, пристрій, відведенням
Формула / Реферат:
1. Пристрій для введення лікарських засобів, який включає в себе корпус, що простягається між дистальним кінцем та проксимальним кінцем, каретку шприца, закріплену з можливістю обертання та пересування у аксіальному напрямку всередині згаданого корпусу між першим положенням та другим положенням, утримуваний всередині згаданої каретки шприц, заповнений лікарським засобом, який включає в себе голку, яка має проксимальний кінець, при цьому...
Спосіб введення лікарських засобів до заднього полюса ока
Номер патенту: 44703
Опубліковано: 12.10.2009
Автори: Сук Св'ятослав Анатолійович, Кузнецова Тетяна Олексіївна, Пасєчнікова Наталя Володимирівна, Саксонов Станіслав Геннадійович, Романова Тетяна Олександрівна
МПК: A61F 9/007
Мітки: заднього, полюса, лікарських, засобів, введення, спосіб, ока
Формула / Реферат:
Спосіб введення лікарських засобів до заднього полюса ока, що включає пункцію зони верхнього склепіння кон'юнктиви ока та введення препарату, який відрізняється тим, що перед пункцією фіксують кон'юнктиву ока з прилеглою теноновою оболонкою і в залежності від локалізації патологічного процесу за 10-12 мм від лімба пунктують голкою внутрішньовенної канюлі з ін'єкційним клапаном, після чого голку виймають, а канюлю проводять в задній...
Попередній патент: Армуючий імплантат для подовженої кістки, зокрема стегнової кістки
Наступний патент: Теплопровідні прутки, призначені для використання в аерозолеутворювальних виробах
Випадковий патент: Планетарна коробка передач