Спосіб (варіанти) і пристрій (варіанти) для підтримки позиціонування для терміналів в бездротовій мережі
Формула / Реферат
1. Спосіб для бездротового зв'язку, який включає:
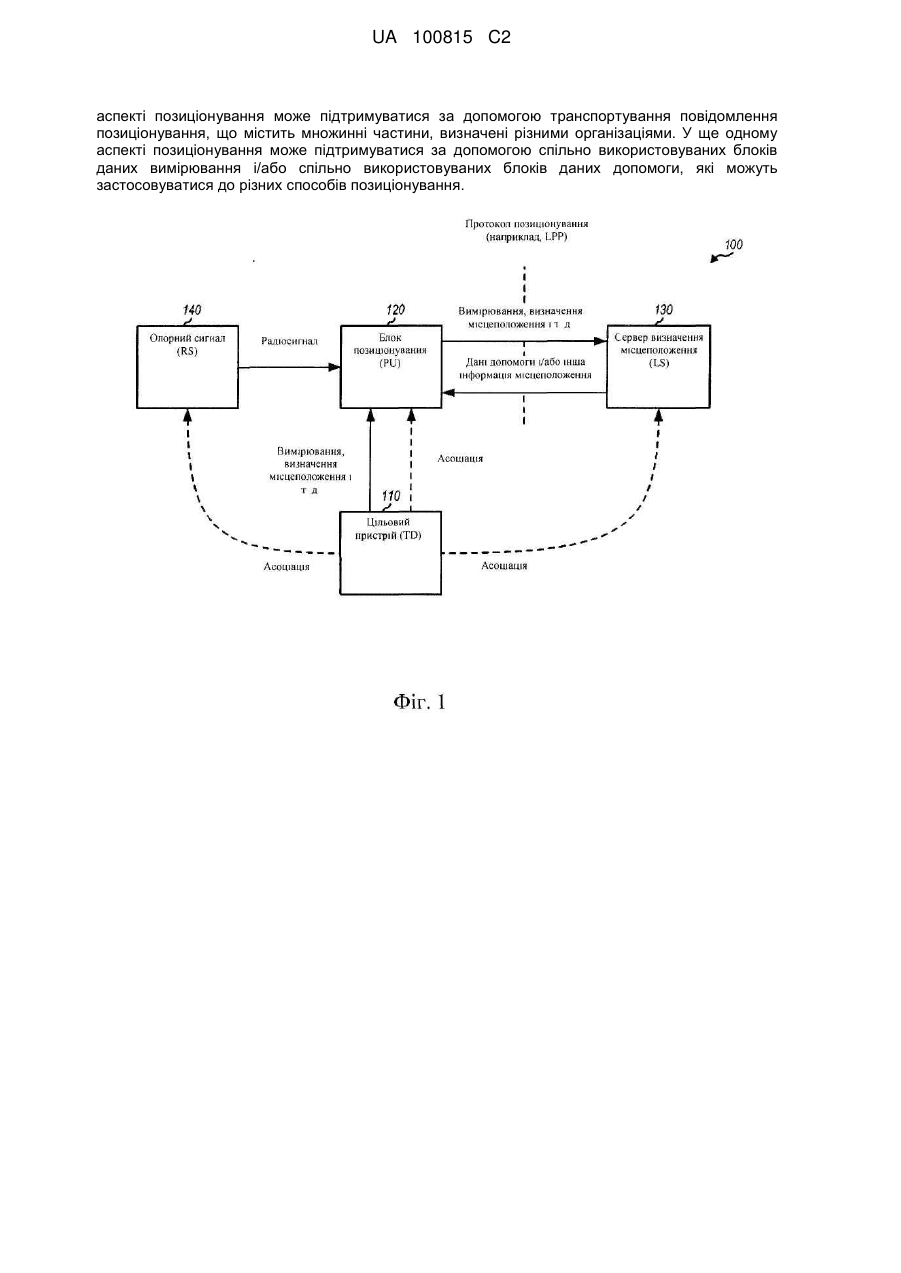
отримання інформації позиціонування для цільового пристрою за допомогою сервера визначення місцеположення за допомогою загального протоколу позиціонування, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, і цільовий пристрій є одним з множини можливих об'єктів; і
визначення інформації місцеположення для цільового пристрою за допомогою сервера визначення місцеположення.
2. Спосіб за пунктом 1, в якому інформація позиціонування містить вимірювання для щонайменше одного джерела опорного сигналу, і в якому інформація місцеположення містить оцінку місцеположення для цільового пристрою, визначену сервером визначення місцеположення на основі вимірювань.
3. Спосіб за пунктом 1, в якому інформація позиціонування вказує місцеположення цільового пристрою, і в якому інформація місцеположення містить дані допомоги, визначені сервером визначення місцеположення на основі інформації позиціонування.
4. Спосіб за пунктом 1, в якому інформація позиціонування містить вимірювання джерел опорного сигналу, які можуть бути прийняті в місцеположенні цільового пристрою, і в якому інформація місцеположення містить дані допомоги, визначені сервером визначення місцеположення на основі інформації позиціонування.
5. Спосіб за пунктом 1, в якому інформація місцеположення містить дані допомоги, і в якому інформація позиціонування містить вимірювання, отримані на основі даних допомоги.
6. Спосіб за пунктом 1, в якому інформація позиціонування для цільового пристрою містить вимірювання для щонайменше одного сигналу від щонайменше одного супутника або щонайменше однієї базової станції, або щонайменше одного термінала, або цільового пристрою, або їх комбінації.
7. Спосіб за пунктом 1, в якому сервер визначення місцеположення постійно знаходиться в мережевому об'єкті.
8. Спосіб за пунктом 1, в якому сервер визначення місцеположення спільно розташований з цільовим пристроєм.
9. Спосіб за пунктом 1, в якому інформація позиціонування для цільового пристрою отримана блоком позиціонування, що постійно знаходиться в одному з другої множини можливих об'єктів, причому цільовий пристрій є одним з другої множини можливих об'єктів.
10. Спосіб за пунктом 9, який додатково включає здійснення зв'язку з блоком позиціонування за допомогою сервера визначення місцеположення за допомогою загального протоколу позиціонування.
11. Спосіб за пунктом 9, який додатково включає виконання обміну можливостями або даними допомоги, або інформацією місцеположення, або їх комбінацією з блоком позиціонування за допомогою загального протоколу позиціонування.
12. Пристрій для бездротового зв'язку, який містить:
засіб для отримання інформації позиціонування для цільового пристрою за допомогою сервера визначення місцеположення за допомогою загального протоколу позиціонування, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, і цільовий пристрій є одним з множини можливих об'єктів; і
засіб для визначення інформації місцеположення для цільового пристрою за допомогою сервера визначення місцеположення.
13. Пристрій за пунктом 12, в якому інформація позиціонування для цільового пристрою отримується блоком позиціонування, що постійно знаходиться в одному з другої множини можливих об'єктів, причому цільовий пристрій є одним з другої множини можливих об'єктів.
14. Пристрій за пунктом 13, який додатково містить засіб для обміну можливостями або даними допомоги, або інформацією місцеположення, або їх комбінацією з блоком позиціонування за допомогою загального протоколу позиціонування.
15. Пристрій для бездротового зв'язку, який містить:
щонайменше один блок обробки, сконфігурований для отримання інформації позиціонування для цільового пристрою за допомогою сервера визначення місцеположення за допомогою загального протоколу позиціонування, і для визначення інформації місцеположення для цільового пристрою за допомогою сервера визначення місцеположення, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, і цільовий пристрій є одним з множини можливих об'єктів.
16. Пристрій за пунктом 15, в якому інформація позиціонування для цільового пристрою отримується блоком позиціонування, що постійно знаходиться в одному з другої множини можливих об'єктів, причому цільовий пристрій є одним з другої множини можливих об'єктів.
17. Пристрій за пунктом 16, в якому щонайменше один блок обробки сконфігурований для обміну можливостями або даними допомоги, або інформацією місцеположення, або їх комбінацією з блоком позиціонування за допомогою загального протоколу позиціонування.
18. Комп'ютерозчитуваний носій, який містить:
код для того, щоб спонукати щонайменше один комп'ютер отримувати інформацію позиціонування для цільового пристрою за допомогою сервера визначення місцеположення за допомогою загального протоколу позиціонування, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, і цільовий пристрій є одним з множини можливих об'єктів, і
код для того, щоб спонукати щонайменше один комп'ютер визначати інформацію місцеположення для цільового пристрою за допомогою сервера визначення місцеположення.
19. Спосіб для бездротового зв'язку, який включає:
передачу інформації позиціонування для цільового пристрою на сервер визначення місцеположення за допомогою загального протоколу позиціонування, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, цільовий пристрій є одним з множини можливих об'єктів; і
прийом інформації місцеположення для цільового пристрою від сервера визначення місцеположення.
20. Спосіб за пунктом 19, в якому передача інформації позиціонування і прийом інформації місцеположення виконуються цільовим пристроєм.
21. Спосіб за пунктом 19, в якому передача інформації позиціонування і прийом інформації місцеположення виконуються блоком позиціонування, зовнішнім відносно цільового пристрою.
22. Спосіб за пунктом 19, який додатково включає вимірювання щонайменше одного сигналу від щонайменше одного джерела опорного сигналу в цільовому пристрої, щоб отримати вимірювання для цільового пристрою, причому згадане щонайменше одне джерело опорного сигналу містить щонайменше один супутник або щонайменше одну базову станцію, або щонайменше один термінал, або їх комбінацію та інформація позиціонування містить вимірювання.
23. Спосіб за пунктом 19, який додатково включає вимірювання сигналу від цільового пристрою в блоці позиціонування, щоб отримати вимірювання для цільового пристрою, причому блок позиціонування є зовнішнім відносно цільового пристрою та інформація позиціонування містить вимірювання.
24. Пристрій для бездротового зв'язку, який містить:
засіб для посилання інформації позиціонування для цільового пристрою на сервер визначення місцеположення за допомогою загального протоколу позиціонування, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, причому цільовий пристрій є одним з множини можливих об'єктів; і
засіб для прийому інформації місцеположення для цільового пристрою від сервера визначення місцеположення.
25. Пристрій за пунктом 24, який додатково містить засіб для вимірювання щонайменше одного сигналу від щонайменше одного джерела опорного сигналу в цільовому пристрої, щоб отримати вимірювання для цільового пристрою, причому щонайменше одне джерело опорного сигналу містить щонайменше один супутник або щонайменше одну базову станцію, або щонайменше один термінал, або їх комбінацію та інформація позиціонування містить вимірювання.
26. Пристрій за пунктом 24, який додатково містить:
засіб для вимірювання сигналу від цільового пристрою в блоці позиціонування, щоб отримати вимірювання для цільового пристрою, причому блок позиціонування є зовнішнім відносно цільового пристрою та інформація позиціонування містить вимірювання.
27. Спосіб для бездротового зв'язку, який включає:
обмін множиною повідомлень позиціонування, що транспортуються разом в одній транзакції повідомлення; і
виконання позиціонування на основі множини повідомлень позиціонування.
28. Спосіб за пунктом 27, в якому обмін множиною повідомлень позиціонування включає передачу множини повідомлень позиціонування як пов'язаних повідомлень або в єдиному контейнерному повідомленні.
29. Спосіб за пунктом 27, в якому обмін множиною повідомлень позиціонування включає прийом множини повідомлень позиціонування, відісланих як пов'язані повідомлення або в єдиному контейнерному повідомленні.
30. Спосіб за пунктом 27, в якому множина повідомлень позиціонування відсилається з повідомленням вихідного від мобільного пристрою запиту визначення місцеположення (MO-LR) за допомогою цільового пристрою, щоб ініціювати позиціонування.
31. Спосіб за пунктом 27, в якому множина повідомлень позиціонування відсилається сервером визначення місцеположення і містить перше повідомлення позиціонування, що переносить дані допомоги, і друге повідомлення позиціонування, що запитує інформацію місцеположення.
32. Спосіб за пунктом 27, в якому множина повідомлень позиціонування відсилається на сервер визначення місцеположення і містить перше повідомлення позиціонування, що запитує дані допомоги, і друге повідомлення позиціонування, що переносить вимірювання.
33. Спосіб за пунктом 27, в якому кожне з множини повідомлень позиціонування є одним з множини типів повідомлення, причому множина типів повідомлень містить: тип повідомлення запиту можливостей, тип повідомлення видачі можливостей, тип повідомлення запиту даних допомоги, тип повідомлення видачі даних допомоги, тип повідомлення запиту інформації місцеположення і тип повідомлення видачі інформації місцеположення.
34. Спосіб за пунктом 27, в якому множина повідомлень позиціонування містить повідомлення позиціонування щонайменше двох типів повідомлення.
35. Пристрій для бездротового зв'язку, який містить:
засіб для обміну множиною повідомлень позиціонування, що транспортуються разом в одній транзакції повідомлення; і
засіб для виконання позиціонування на основі множини повідомлень позиціонування.
36. Пристрій за пунктом 35, в якому засіб для обміну множиною повідомлень позиціонування містить засіб для посилання множини повідомлень позиціонування як пов'язаних повідомлень або в єдиному контейнерному повідомленні.
37. Пристрій за пунктом 35, в якому засіб для обміну множиною повідомлень позиціонування містить засіб для прийому множини повідомлень позиціонування, відісланих як пов'язані повідомлення або в єдиному контейнерному повідомленні.
38. Пристрій за пунктом 35, в якому множина повідомлень позиціонування відсилається з повідомленням запиту визначення місцеположення (MO-LR), що виходить від мобільного пристрою, за допомогою цільового пристрою, щоб ініціювати позиціонування.
39. Спосіб для бездротового зв'язку, який включає:
обмін повідомленням позиціонування, що містить першу частину і другу частину для конкретного типу транзакції, причому перша частина містить першу інформацію для позиціонування, визначену першою організацією, і друга частина містить другу інформацію для позиціонування, визначену другою організацією; і
виконання позиціонування на основі повідомлення позиціонування.
40. Спосіб за пунктом 39, в якому обмін повідомленням позиціонування включає передачу повідомлення позиціонування від цільового пристрою на сервер визначення місцеположення або від сервера визначення місцеположення на цільовий пристрій.
41. Спосіб за пунктом 39, в якому обмін повідомленням позиціонування включає прийом повідомлення позиціонування сервером визначення місцеположення від цільового пристрою або цільовим пристроєм від сервера визначення місцеположення.
42. Спосіб за пунктом 39, в якому перша організація є "Проектом партнерства третього покоління" (3GPP), і в якому друга організація є "Проектом партнерства третього покоління 2" (3GPP2) або відкритим співтовариством виробників мобільного зв'язку (ОМА), або робочою групою інженерів Інтернет (IETF), або інститутом інженерів по електроніці і електротехніки (IEEE), або оператором мережі, або постачальником обладнання.
43. Пристрій для бездротового зв'язку, який містить:
засіб для обміну повідомленням позиціонування, що містить першу частину і другу частину для конкретного типу транзакції, причому перша частина містить першу інформацію для позиціонування, визначену першою організацією, і друга частина містить другу інформацію для позиціонування, визначену другою організацією; і
засіб для виконання позиціонування на основі повідомлення позиціонування.
44. Пристрій за пунктом 43, в якому засіб для обміну повідомленням позиціонування містить засіб для посилання повідомлення позиціонування від цільового пристрою на сервер визначення місцеположення або від сервера визначення місцеположення на цільовий пристрій.
45. Пристрій за пунктом 43, в якому засіб для обміну повідомленням позиціонування містить засіб для прийому повідомлення позиціонування сервером визначення місцеположення від цільового пристрою або цільовим пристроєм від сервера визначення місцеположення.
46. Спосіб для бездротового зв'язку, який включає:
обмін блоком даних вимірювання, застосовним до множини способів позиціонування, причому кожний з множини способів позиціонування асоціюється з різним набором застосовних блоків даних вимірювання; і
виконання позиціонування на основі обмінного блока даних вимірювання і відповідно до способу позиціонування, причому спосіб позиціонування є одним з множини способів позиціонування.
47. Спосіб для бездротового зв'язку, який включає:
обмін блоком даних допомоги, застосовним до множини способів позиціонування, причому кожний з множини способів позиціонування асоціюється з різним набором застосовних блоків даних допомоги; і
виконання позиціонування на основі обмінного блока даних допомоги і відповідно до способу позиціонування, причому спосіб позиціонування є одним з множини способів позиціонування.
Текст
Реферат: Описуються способи для підтримки позиціонування для терміналів в бездротовій мережі. У одному аспекті позиціонування може підтримуватися за допомогою сервера визначення місцеположення, який може постійно знаходитися в різних об'єктах. У одному виконанні сервер визначення місцеположення може отримувати інформацію позиціонування (наприклад, вимірювання) для цільового пристрою за допомогою загального протоколу позиціонування. Сервер визначення місцеположення може використовувати загальний протокол позиціонування незалежно від того, де він постійно знаходиться, і може зв'язуватися з іншими об'єктами за допомогою цього протоколу. Сервер визначення місцеположення може визначати інформацію місцеположення (наприклад, оцінку визначення місцеположення) для цільового пристрою на основі інформації позиціонування. У іншому аспекті позиціонування може підтримуватися за допомогою транспортування множинних повідомлень позиціонування разом. У ще одному UA 100815 C2 (12) UA 100815 C2 аспекті позиціонування може підтримуватися за допомогою транспортування повідомлення позиціонування, що містить множинні частини, визначені різними організаціями. У ще одному аспекті позиціонування може підтримуватися за допомогою спільно використовуваних блоків даних вимірювання і/або спільно використовуваних блоків даних допомоги, які можуть застосовуватися до різних способів позиціонування. UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 Дана заявка на патент вимагає пріоритет наступних попередніх заявок США: - Заявка №61/171,398, що називається "LPP Generic Capabilities, " подана 21 квітня 2009, - Заявка №61/172,719, що називається "LPP Stage 2" подана 25 квітня 2009, - Заявка №61/218,929, що називається "LPP", подана 20 червня 2009, - Заявка №61/234,282, що називається "LPP", подана 15 серпня 2009, і - Заявка №61/247,363, що називається "LPP", подана ЗО вересня 2009, кожна з яких передана її правонаступнику, і тим самим явно включена тут по посиланню. Галузь винаходу Даний опис загалом належить до зв'язку і, конкретніше, до способів для підтримки позиціонування для терміналів в бездротовій мережі. Попередній рівень техніки Часто бажано, а іноді необхідно, знати місцеположення термінала, наприклад, стільникового телефону. Терміни "місцеположення" і "позиція" є синонімами і використовуються взаємозамінно в даному описі. Наприклад, клієнт служб визначення місцеположення (LCS) може бажати знати місцеположення термінала і може зв'язуватися з мережевим сервером, щоб запитувати місцеположення термінала. Мережевий сервер і термінал можуть потім обмінюватися повідомленнями, якщо необхідно, щоб дістати оцінку місцеположення для термінала. Мережевий сервер може потім повертати цю оцінку місцеположення клієнту LCS. Різні термінали можуть працювати в різних сценаріях і можуть мати різні можливості відносно позиціонування. Позиціонування належить до функціональних можливостей, які визначають географічне місцеположення цільового термінала. Може бути бажано гнучко підтримувати позиціонування для терміналів з різними можливостями. Суть винаходу У даному описі описуються способи для підтримки позиціонування для терміналів в бездротовій мережі. У одному аспекті позиціонування може і підтримуватися за допомогою сервера визначення місцеположення, який може постійно знаходитися в різних об'єктах. У одному виконанні сервер визначення місцеположення може отримувати інформацію позиціонування (наприклад, вимірювання, грубу оцінку місцеположення і т. д.) для цільового пристрою за допомогою загального протоколу позиціонування. Сервер визначення місцеположення може постійно знаходитися в мережевому об'єкті або може бути спільно розташований (наприклад, може бути частиною) з цільовим пристроєм. Сервер визначення місцеположення може використовувати загальний протокол позиціонування незалежно від того, де він постійно знаходиться, і може зв'язуватися з іншими об'єктами за допомогою загального протоколу позиціонування. Сервер визначення місцеположення може визначати інформацію місцеположення (наприклад, дані допомоги, оцінку місцеположення і т. д.) для цільового пристрою на основі інформації позиціонування. У іншому аспекті позиціонування може підтримуватися за допомогою транспортування множинних повідомлень позиціонування разом, які можуть підвищити ефективність і зменшити затримку. У одному виконанні об'єкт (наприклад, сервер визначення місцеположення, блок позиціонування або цільовий пристрій) може обмінюватися (наприклад, відсилати або приймати) множиною повідомлень позиціонування, що транспортуються разом в одній транзакції повідомлення. Множина повідомлень позиціонування може бути відіслана як пов'язані повідомлення або в єдиному контейнерному повідомленні. Об'єкт може виконувати позиціонування на основі множини повідомлень позиціонування. У ще одному аспекті позиціонування може підтримуватися за допомогою транспортування повідомлення позиціонування, що містить множинні частини, визначені різними організаціями. У одному виконанні об'єкт може обмінюватися повідомленням позиціонування, що містить першу частину і другу частину для конкретного типу транзакції. Перша частина може включати в себе першу інформацію для позиціонування, визначену першою організацією, і друга частина може включати в себе другу інформацію для позиціонування, визначену другою організацією. Об'єкт може виконувати позиціонування на основі повідомлення позиціонування. Наприклад, об'єкт може визначати оцінку місцеположення на основі першої інформації (наприклад, вимірювань) в першій частині, а також другої інформації (наприклад, більшої кількості вимірювань або грубої оцінки місцеположення) у другій частині. У ще одному аспекті позиціонування може підтримуватися за допомогою спільно використовуваних блоків даних вимірювання і/або спільно використовуваних блоків даних допомоги, які можуть застосовуватися до різних способів позиціонування. У одному виконанні об'єкт може обмінюватися блоком даних вимірювання, застосовним до першої множини способів позиціонування. Кожний з першої множини способів позиціонування може бути асоційований з різним набором застосовних блоків даних вимірювання. Об'єкт може виконувати 1 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 позиціонування на основі обмінного блока даних вимірювання і відповідно до способу позиціонування, який може бути одним з першої множини способів позиціонування. Альтернативно або додатково, об'єкт може обмінюватися блоком даних допомоги, застосовним до другої множини способів позиціонування. Кожний з другої множини способів позиціонування може бути асоційований з відмінним набором застосовних блоків даних допомоги. Об'єкт може виконувати позиціонування на основі обмінного блока даних допомоги і відповідно до способу позиціонування, який може бути одним з другої множини способів позиціонування. Різні аспекти і ознаки розкриття описуються в додаткових подробицях нижче. Короткий опис креслень Фіг. 1 показує діаграму зразкового розгортання, що підтримує позиціонування. Фіг. 2А показує конфігурацію, що підтримує способи позиціонування за допомогою термінала і на основі термінала. Фіг. 2В показує конфігурацію, що підтримує основані на мережі способи позиціонування. Фіг. 2С і 2D показують дві конфігурації, що підтримують однорангове позиціонування. Фіг. З показує ієрархічну структуру для протоколу позиціонування. Фіг. 4А показує структуру повідомлення позиціонування. Фіг. 4В показує структуру повідомлення позиціонування із множинними частинами, визначеними різними організаціями. Фіг. 5 показує потік повідомлень для служби запиту місцеположення, що вихідить від мобільного пристрою. Фіг. 6 показує потік повідомлень для сеансу визначення місцеположення із множинними транзакціями. Фіг. 7-11 показують різні процеси для підтримки позиціонування. Фіг. 12 показує блок-схему цільового пристрою, базової станції і сервера визначення місцеположення. Докладний опис Фіг. 1 показує діаграму зразкового розгортання (розміщення) 100, що підтримує позиціонування. Цільовий пристрій 110 (TD) є об'єктом, місцеположення якого повинне бути визначене. Цільовий пристрій 110 може бути стаціонарним або мобільним і може також називатися терміналом, мобільною станцією, користувацьким обладнанням (UE), терміналом доступу, терміналом з дозволеним SUPL (SET) в надійному визначенні місцеположення площини користувача (SUPL) від відкритого співтовариства виробників мобільного зв'язку (ОМА), блоком абонента, станцією і т. д. Цільовий пристрій 110 може бути стільниковим телефоном, персональним цифровим асистентом (PDA), бездротовим пристроєм, бездротовим модемом, бездротовим маршрутизатором, ноутбуком, пристроєм телеметрії, пристроєм відстеження і т. д. Цільовий пристрій 110 може зв'язуватися з однією або більше базовими станціями в бездротовій мережі. Цільовий пристрій 110 може також зв'язуватися одноранговим способом з іншими терміналами. Джерело 140 опорного сигналу (RS) є об'єктом, який передає сигнал (наприклад, радіосигнал), який може бути виміряний для підтримки позиціонування. Джерело 140 опорного сигналу може бути супутником в супутниковій системі позиціонування (SPS), яка може бути глобальною системою позиціонування Сполучених Штатів (GPS), європейською системою Galileo, російською системою GLONASS або деякою іншою SPS. Джерело 140 опорного сигналу може також бути базовою станцією в бездротовій мережі. Базова станція може також називатися точкою доступу, Вузлом В, вдосконаленим Вузлом В (eNB) і т. д. Бездротова мережа може бути мережею глобальної системи мобільного зв'язку (GSM), мережею широкосмугового множинного доступу з кодовим розділенням каналів (WCDMA), мережею доступу загальної служби пакетної радіопередачі (GPRS), мережею проекту довгострокового розвитку (LTE), мережею CDMA ЇХ, мережею високошвидкісної передачі пакетних даних (HRPD), мережею передачі в ультра широкосмуговому діапазоні для мобільних пристроїв (UMB), бездротовою локальною мережею (WLAN) і т. д. GSM, WCDMA, GPRS і LTE є різними радіо-технологіями, визначеними організацією "Проект партнерства третього покоління" (З GPP). CDMA ЇХ, HRPD і UMB є різними радіо-технологіями, визначеними організацією "Проект партнерства третього покоління 2" (3GPP2). Джерело 140 опорного сигналу також може бути широкомовною радіостанцією в широкомовній мережі, яка може бути телевізійною мережею, цифровою широкомовною мережею і т. д. Джерело 140 опорного сигналу також може бути частиною термінала, наприклад, цільового пристрою 110. Загалом, один або більше сигналів від одного або більше джерел опорного сигналу можуть бути виміряні для визначення місцеположення цільового пристрою 110. Тільки одне джерело 140 опорного сигналу показане 2 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 на Фіг. 1 для простоти. Місцеположення джерела опорного сигналу може бути відоме або може бути встановлене, і може бути використане для позиціонування цільового пристрою 110. Блок 120 позиціонування (PU) є об'єктом, який може вимірювати сигнали від одного або більше джерел опорного сигналу, такі як джерело 140 опорного сигналу. Блок 120 позиціонування також може бути здатним обчислювати оцінку місцеположення для цільового пристрою 110 на основі вимірювань, отриманих блоком 120 позиціонування. Блок 120 позиціонування може бути частиною цільового пристрою 110 або окремим пристроєм, або частиною деякого іншого об'єкта. Цей інший об'єкт може бути іншим терміналом, базовою станцією, спеціалізованим блоком вимірювання місцеположення (LMU) в бездротовій мережі і т. д. Сервер 130 визначення місцеположення (LS) є об'єктом, який може приймати інформацію позиціонування для цільового пристрою і визначати інформацію місцеположення для цільового пристрою. Загалом, інформація позиціонування може бути будь-якою інформацією, що використовується для підтримки позиціонування. Наприклад, інформація позиціонування може містити вимірювання, грубу оцінку місцеположення і т. д. Інформація місцеположення може бути будь-якою інформацією, пов'язаною з місцеположенням цільового пристрою. Наприклад, інформація місцеположення може містити дані допомоги для формування вимірювань сигналів для позиціонування, остаточної оцінки місцеположення для цільового пристрою і т. д. Сервер 130 визначення місцеположення може зв'язуватися з блоком 120 позиціонування для прийому інформації позиціонування від блока 120 позиціонування і видачі інформації місцеположення (наприклад, даних допомоги) в блок 120 позиціонування. Сервер 130 визначення місцеположення може також обчислювати оцінку місцеположення для цільового пристрою 110 на основі вимірювань, прийнятих від блока 120 позиціонування, і видавати оцінку місцеположення блоку 120 позиціонування. Сервер 130 визначення місцеположення може постійно знаходитися в будь-якому з множини об'єктів. Наприклад, сервер 130 визначення місцеположення може бути обслуговуючим центром визначення місцеположення мобільних пристроїв (SMLC), автономним SMLC (SAS), вдосконаленим SMLC (E-SMLC), платформою місцеположення SUPL (SLP), об'єктом визначення позиції (PDE) і т. д. Сервер 130 визначення місцеположення також може бути частиною термінала, наприклад, частиною цільового пристрою 110. У одному виконанні сервер 130 визначення місцеположення може зв'язуватися з іншими об'єктами (наприклад, блоком 120 позиціонування) за допомогою загального протоколу позиціонування незалежно від того, де постійно знаходиться сервер 130 визначення місцеположення. Загальний протокол позиціонування може бути протоколом позиціонування LTE (LPP), що використовується в LTE або деякому іншому протоколі позиціонування. Фіг. 1 показує чотири типові об'єкти, які можуть підтримувати позиціонування для цільового пристрою 110. Різні конфігурації можуть підтримуватися об'єктами, показаними на Фіг. 1. У одному виконанні можуть бути спільно розташовані цільовий пристрій 110 і блок 120 позиціонування. У цьому виконанні цільовий пристрій 110 може вимірювати один або більше сигналів від одного або більше джерел опорного сигналу для позиціонування цільового пристрою 110. У іншому виконанні можуть бути спільно розташовані цільовий пристрій 110 і джерело 140 опорного сигналу. У цьому виконанні цільовий пристрій 110 може передавати сигнал, який може бути виміряний і використаний для позиціонування цільового пристрою. У ще одному виконанні цільовий пристрій 110 може бути спільно розташований із сервером 130 визначення місцеположення. У цьому виконанні цільовий пристрій 110 може приймати вимірювання від блока 120 позиціонування і може виконувати позиціонування для цільового пристрою 110 на основі цих вимірювань. Загалом, цільовий пристрій 110 може підтримувати блок 120 позиціонування і/або джерело 140 опорного сигналу, щоб вимірювати інші сигнали або мати свій власний виміряний сигнал. Інші конфігурації також можуть підтримуватися об'єктами, показаними на Фіг. 1. Наприклад, блок 120 позиціонування і сервер 130 визначення місцеположення можуть бути спільно розташовані. Як інший приклад, можуть бути спільно розташовані джерело 140 опорного сигналу і сервер 130 визначення місцеположення. Фіг. 2А показує конфігурацію, що підтримує способи позиціонування за допомогою терміналів і основані на терміналі. У цій конфігурації, блок 120 позиціонування спільно розташований з цільовим пристроєм 110. Блок 120 позиціонування може вимірювати сигнали від джерел опорного сигналу, таких як супутник 140а, базова станція 140Ь і т. д. Блок 120 позиціонування може відсилати вимірювання і/або іншу інформацію (наприклад, грубу або точну оцінку місцеположення) на сервер 130 визначення місцеположення. Сервер 130 визначення місцеположення може визначати інформацію місцеположення (наприклад, дані допомоги) і може відсилати цю інформацію місцеположення на блок 120 позиціонування (наприклад, допомагати блоку 120 позиціонування вимірювати сигнали і можливо діставати оцінку 3 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 місцеположення). Сервер 130 визначення місцеположення може також визначати оцінку місцеположення для цільового пристрою 110 на основі вимірювань і/або іншої інформації, прийнятої від блока 120 позиціонування. Сервер 130 визначення місцеположення може відправляти оцінку місцеположення деякому зовнішньому клієнту (не показаний на Фіг. 2А) і/або на цільовий пристрій 110. Конфігурація на Фіг. 2А може бути використана для способів позиціонування за допомогою терміналів і основаних на терміналі, таких як допоміжна GNSS (AGNSS), спостережувана різниця за часом (OTD), поліпшена спостережувана різниця за часом (E-OTD), спостережувана різниця за часом прибуття (OTDOA), вдосконалена трилатерація прямої лінії зв'язку (A-FLT) і т. д. Фіг. 2В показує конфігурацію, що підтримує основані на мережі способи позиціонування. У цій конфігурації джерело 140 опорного сигналу спільно розташоване з цільовим пристроєм 110, і блок 120 позиціонування є зовнішнім відносно пристрою 110. Блок 120 позиціонування може вимірювати сигнал від цільового пристрою 110. Блок 120 позиціонування може також приймати вимірювання, зроблені цільовим пристроєм 110, для інших джерел опорного сигналу (не показані на Фіг. 2В). Ці вимірювання від цільового пристрою 110 можуть бути використані для підтримки передачі обслуговування цільового пристрою 110 і/або в інших цілях. Блок 120 позиціонування може відсилати вимірювання і/або іншу інформацію на сервер 130 визначення місцеположення. Сервер 130 визначення місцеположення може визначати інформацію місцеположення (наприклад, дані допомоги) і може відсилати інформацію місцеположення на блок 120 позиціонування (наприклад, допомагати блоку 120 позиціонування вимірювати сигнали від джерела 140 опорного сигналу). Сервер 130 визначення місцеположення може також визначати оцінку місцеположення для цільового пристрою 110 на основі вимірювань і/або іншої інформації, прийнятої від блока 120 позиціонування. Сервер 130 визначення місцеположення може відправляти оцінку місцеположення деякому зовнішньому клієнту (не показаний на Фіг. 2В) і/або на цільовий пристрій 110. Конфігурація на Фіг. 2В може бути використана для основаних на мережі способів позиціонування, таких як поліпшена ідентифікація стільника (ECID), різниця в часі прибуття висхідної лінії зв'язку (U-TDOA) і т. д. Для простоти Фіг. 2А і 2В показують один блок 120 позиціонування і один або більше джерел 140 опорного сигналу. Загалом, будь-яка кількість блоків позиціонування може вимірювати сигнали від будь-якої кількості джерел опорного сигналу і може відсилати свої вимірювання на сервер 130 визначення місцеположення. Цільовий пристрій 110 може діяти як джерело опорного сигналу для деяких вимірювань і/або як блок позиціонування для інших вимірювань. Фіг. 2А і 2В показують дві конфігурації, що підтримують неоднорангове (Р2Р) позиціонування. Не-Р2Р позиціонування може мати місце, коли джерело 140 опорного сигналу, блок 120 позиціонування і сервер 130 визначення місцеположення спільно не розташовані (наприклад, не є частиною) з будь-яким терміналом, який не є цільовим пристроєм 110. Для неР2Р позиціонування сервер 130 визначення місцеположення може бути мережевим об'єктом або частиною цільового пристрою 110, блок 120 позиціонування може бути частиною або цільового пристрою 110, або мережевого об'єкта, і джерело 140 опорного сигналу може бути частиною або цільового пристрою 110, або зовнішнього об'єкта (наприклад, супутника, базової станції, широкомовної радіостанції і т. д.). У одному виконанні Р2Р позиціонування може підтримуватися за допомогою об'єктів, показаних на Фіг. 1. Р2Р позиціонування може мати місце, коли перший термінал приймає на себе роль сервера 130 визначення місцеположення або блока 120 позиціонування, або джерела 140 опорного сигналу, або будь-якої їх комбінації, щоб допомогти здійснити позиціонування другого термінала, який приймає на себе роль цільового пристрою 110. Різні типи Р2Р позиціонування можуть підтримуватися залежно від того, де постійно знаходяться сервер 130 визначення місцеположення, блок 120 позиціонування і джерело 140 опорного сигналу, або чи приймає на себе перший або другий термінал роль кожного сервера визначення місцеположення, блока позиціонування і джерела опорного сигналу. Фіг. 2С показує конфігурацію, що підтримує Р2Р позиціонування. У цій конфігурації перший термінал 102 є цільовим пристроєм 110 і також приймає на себе роль сервера 130 визначення місцеположення і джерела 140 опорного сигналу. Другий термінал 104 зв'язується одноранговим способом з першим терміналом 102 і приймає на себе роль блока 120 позиціонування. Блок 120 позиціонування в терміналі 104 може вимірювати сигнал від джерела 140 опорного сигналу в терміналі 102 і може відсилати ці вимірювання і, можливо, іншу інформацію на сервер 130 визначення місцеположення в терміналі 102. Сервер 130 визначення місцеположення може визначати інформацію місцеположення (наприклад, дані допомоги) і може відсилати цю інформацію місцеположення в блок 120 позиціонування (наприклад, допомагати блоку 120 позиціонування вимірювати сигнали від джерела 140 опорного сигналу). 4 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 Сервер 130 визначення, місцеположення може також визначати оцінку місцеположення для цільового пристрою 110 на основі вимірювань і/або іншої інформації, прийнятої від блока 120 позиціонування. Сервер 130 визначення місцеположення може відправляти оцінку місцеположення деякому зовнішньому клієнту (не показаний на Фіг. 2С) і/або передавати цю оцінку місцеположення на деякий об'єкт (наприклад, додаток) в цільовому пристрої 110. Для простоти Фіг. 2С показує термінал 102, що зв'язується з одним рівноправним (одноранговим) терміналом 104. Загалом, термінал 102 може зв'язуватися з будь-якою кількістю рівноправних терміналів і може запитувати вимірювання від одного або більше рівноправних терміналів. Кожний рівноправний термінал може діяти як блок позиціонування і може вимірювати сигнал від термінала 102. Кожний рівноправний термінал може відсилати вимірювання і своє місцеположення на термінал 102. Місцеположення термінала 102 може бути визначене на основі вимірювань від всіх рівноправних терміналів і їх, представлених у звіті, місцеположень. Фіг. 2D показує іншу конфігурацію, що підтримує Р2Р позиціонування. У цій конфігурації перший термінал 106 є цільовим пристроєм 110 і також приймає на себе роль блока 120 позиціонування і сервера 130 визначення місцеположення. Другий термінал 108 зв'язується одноранговим способом з першим терміналом 106 і приймає на себе роль джерела 140 опорного сигналу. Блок 120 позиціонування в терміналі 106 може вимірювати сигнал від джерела 140 опорного сигналу в терміналі 108 і може відсилати ці вимірювання і/або іншу інформацію на сервер 130 визначення місцеположення в терміналі 106. Сервер 130 визначення місцеположення може також приймати місцеположення термінала 108. Сервер 130 визначення місцеположення може визначати інформацію місцеположення (наприклад, дані допомоги) і може передавати інформацію місцеположення на блок 120 позиціонування (наприклад, допомагати блоку 120 позиціонування вимірювати сигнали від джерела 140 опорного сигналу) в терміналі 108. Сервер 130 визначення місцеположення може також визначати оцінку місцеположення для цільового пристрою 110 на основі вимірювань і/або іншої інформації, прийнятої від блока 120 позиціонування. Сервер 130 визначення місцеположення може відправляти оцінку місцеположення деякому зовнішньому клієнту (не показаний на Фіг 2D) і/або передавати оцінку місцеположення на деякий об'єкт (наприклад, додаток) в цільовому пристрої 110. Для простоти, Фіг. 2D показує термінал 106, що зв'язується з одним рівноправним терміналом 108. Загалом, термінал 106 може зв'язуватися з будь-якою кількістю рівноправних терміналів і може виконувати вимірювання для одного або більше рівноправних (однорангових) терміналів. Кожний рівноправний термінал може діяти як джерело опорного сигналу, сигнал якого може бути виміряний терміналом 106. Кожний рівноправний термінал може відсилати своє місцеположення на термінал 106. Місцеположення термінала 106 може бути визначене на основі вимірювань для всіх рівноправних терміналів і їх, представлених у звіті, місцеположень. Для Р2Р позиціонування роль блока 120 позиціонування і сервера 130 визначення місцеположення може бути прийнята різними терміналами. Щоб уникнути двозначності, термінал, що ініціює транзакцію місцеположення, може визначати, який пристрій/термінал транзакції прийме на себе роль кожного з сервера визначення місцеположення і блока позиціонування. Кожний термінал може потім приймати на себе роль, визначену терміналом ініціації. Р2Р позиціонування може бути використане для позиціонування термінала, як описано вище. Р2Р позиціонування також може бути використане, щоб допомогти здійснювати позиціонування точки доступу для фемтостільника, який може також називатися домашнім Вузлом В (HNB), домашнім eNB (HeNB) і т. д. В цьому випадку точка доступу може розглядатися як термінал. У одному виконанні типові способи позиціонування (способи GPM) можуть бути використані для підтримки позиціонування цільових пристроїв. Типовий спосіб позиціонування є способом позиціонування, який підтримує позиціонування для цільового пристрою за допомогою різних типів джерел опорного сигналу, що використовують один і той же тип вимірювань і процедуру обчислення місцеположення. 5 UA 100815 C2 Таблиця 1 Типові способи позиціонування GPM GPM, основане на різниці за часом висхідної лінії зв'язку або низхідної лінії зв'язку GPM, основане на часі поширення сигналу GPM, основане на напрямку GPM, основане на втратах на трасі GPM зіставлення шаблону RF 5 10 15 Опис Використання часу різниць прибуття між будь-яким (і) сигналом одного і того ж джерела опорного сигналу/цільового пристрою, виміряним в різних блоках позиціонування (для висхідної лінії зв'язку), або (іі) сигналами різних джерел опорного сигналу, виміряними за допомогою блока позиціонування/цільового пристрою (для низхідної лінії зв'язку). Використання способу трилатерації для обчислення місцеположення цільового пристрою. Використання вимірювань затримки поширення сигналів від джерела опорного сигналу до блока позиціонування з одним із цих об'єктів, що знаходиться у відомому місцеположенні, та іншим об'єктом, спільно розташованим з цільовим пристроєм. Використання способу трилатерації для обчислення місцеположення. Використання вимірювань напрямку сигналу від джерела опорного сигналу до блока позиціонування, де джерело опорного сигналу може бути частиною цільового пристрою, і блок позиціонування може бути частиною мережі. Використання способу трилатерації для обчислення місцеположення. Використання вимірювань рівня сигналу джерела опорного сигналу в блоці позиціонування для оцінки відстані між джерелом опорного сигналу і блоком позиціонування на основі загасання сигналу. Може використовувати спосіб трилатерації для обчислення місцеположення. Використання вимірювань рівня сигналу будь-якого (і) одного і того ж джерела опорного сигналу, спільно розташованого з цільовим пристроєм, в різних блоках позиціонування, або (іі) різних основаних на мережі джерел опорного сигналу в одному і тому ж блоці позиціонування, спільно розташованому з цільовим пристроєм. Використання заздалегідь певних шаблонів рівня РЧ сигналу в невеликих географічних областях для визначення найбільш вірогідного місцеположення цільового пристрою на основі зіставлення шаблону. Виявлення наявності конкретного джерела опорного сигналу без вимірювання сигналу від джерела опорного сигналу також може бути включене в один або більше типових способів позиціонування, перелічених в Таблиці 1, для підтримки ID стільника або основаного на WLAN позиціонування. Комбінація типових способів позиціонування також може бути використана для позиціонування, наприклад, щоб підвищити точність. У одному виконанні може бути визначений набір класів способу позиціонування (класів PMC). PMC може включати в себе набір способів позиціонування, визначених за допомогою застосування одного або більше типових способів позиціонування до заданого типу джерела опорного сигналу. Різні типи джерел опорного сигналу можуть бути використані для позиціонування і можуть включати в себе вузли eNB LTE, термінали з функцією LTE, базові станції CDMA ЇХ, термінали з функцією ЇХ і т. д. Для заданого типу джерела опорного сигналу один або більше конкретних способів позиціонування можуть бути визначені за допомогою застосування одного або більше типових способів позиціонування до цього джерела опорного сигналу. Наприклад, A-GPS може бути отримана за допомогою застосування GPM, основаного на різниці за часом низхідної лінії зв'язку, до джерел опорного сигналу GPS, U-TDOA може бути отримана за допомогою застосування GPM, основаного на різниці за часом висхідної лінії 6 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 зв'язку, до джерела опорного сигналу GSM, E-CID може бути отримана за допомогою застосування GPM, основаного на напрямку, і/або GPM зіставлення шаблону RF до джерела опорного сигналу LTE і т. д. Кожний РМС може включати в себе один або більше способів позиціонування. Способи позиціонування в кожному РМС можуть бути пов'язані, оскільки вони використовують вимірювання одного і того ж типу джерела опорного сигналу. Ці вимірювання можуть перекриватися, і одні і ті ж вимірювання можуть бути використані для різних способів позиціонування в РМС. Дані допомоги, що використовуються для того, щоб дозволити вимірювання і/або обчислення місцеположення для способів позиціонування в одному і тому ж РМС, можуть також перекриватися (наприклад, якщо вимірювання також перекриваються). Вимірювання, що перекриваються, і дані допомоги можуть бути використані для ефективнішої підтримки декількох способів позиціонування в РМС, що використовує скорочений набір даних допомоги і вимірювань. Наприклад, вимірювання і дані допомоги, які застосовуються до множинних способів позиціонування, можуть бути передані тільки один раз, замість передачі для кожного способу позиціонування. Фіг. З показує ієрархічну структуру 300 для протоколу позиціонування, яка може бути використана сервером 130 визначення місцеположення. Протокол позиціонування може підтримувати набір класів РМС, який може бути визначений для різних типів джерел опорного сигналу, як описано вище. Кожний РМС може включати в себе набір з одного або більше способів позиціонування, визначених для конкретного типу джерела опорного сигналу. Наприклад, РМС A-GNSS може включати в себе способи позиціонування A-GPS і A-Galileo, PMC LTE низхідної лінії зв'язку може включати в себе способи позиціонування OTDOA і E-CID, РМС LTE висхідної лінії зв'язку може включати в себе спосіб позиціонування E-CID і т. д. Інші класи РМС можуть бути визначені для низхідної лінії зв'язку WCDMA, висхідної лінії зв'язку WCDMA, низхідної лінії зв'язку CDMA ЇХ, висхідної лінії зв'язку CDMA ЇХ, низхідної лінії зв'язку WiMAX, висхідної лінії зв'язку WiMAX, Wi-Fi 802.11, датчиків і т. д. Спосіб позиціонування (РМ) може бути використаний для визначення місцеположення цільового пристрою і може бути асоційований з конкретним типовим способом позиціонування і/або конкретним типом джерела опорного сигналу. Кожний спосіб позиціонування може підтримувати всі або піднабір всіх вимірювань і даних допомоги, що застосовуються для його РМС. Набір вимірювань і даних допомоги, що підтримуються заданим способом позиціонування, може бути обов'язковим або необов'язковим, або умовним для будь-якого блока позиціонування або сервера визначення місцеположення, що підтримує цей спосіб позиціонування. Блок позиціонування або сервер визначення місцеположення, який підтримує заданий РМС, може підтримувати щонайменше один спосіб позиціонування в цьому РМС. Блок позиціонування або сервер визначення місцеположення, який підтримує заданий спосіб позиціонування, може підтримувати всі обов'язкові (і можливо, необов'язкові і/або умовні) вимірювання і дані допомоги для цього способу позиціонування.У одному виконанні набір блоків даних вимірювання (блоків MDU) може бути визначений для всіх способів позиціонування, що підтримуються. MDU може бути колекцією з однієї або більше груп даних, які можуть бути використані для представлення звіту про вимірювання і їх атрибути. MDU може застосовуватися до одного або більше способів позиціонування в конкретному РМС. MDU може застосовуватися до множинних способів позиціонування і може бути ефективно відісланий один раз, щоб видавати дані вимірювання в ці способи позиціонування (замість видачі окремо для кожного способу позиціонування). Наприклад, MDU 2 на Фіг. З може застосовуватися до способів позиціонування РМа і РМb і може бути відісланий один раз для цих двох способів позиціонування. MDU може застосовуватися до одного джерела опорного сигналу і може повторюватися для множинних джерел опорного сигналу одного і того ж типу, наприклад, щоб забезпечувати або запитувати псевдодіапазони для множинних супутників, різниці у часі для множинних базових станцій і т. д. Блоки MDU можуть дозволяти визначити можливості серверів визначення місцеположення і блоків позиціонування, наприклад, відносно того, які блоки MDU підтримує сервер визначення місцеположення або блок позиціонування. Блоки MDU можуть також дозволяти серверу 130 визначення місцеположення запитувати блок 120 позиціонування, щоб видавати дані вимірювання гнучким і точним способом. Сервер 130 визначення місцеположення може вказувати деякі характеристики (наприклад, точність і час відповіді) MDU при запиті його від блока 120 позиціонування. Блок 120 позиціонування може вказувати характеристики (наприклад, точність) MDU, які він здатний забезпечувати (наприклад, за допомогою своїх можливостей). 7 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 У одному виконанні набір блоків даних допомоги (блоків ADU) може бути визначений для всіх способів позиціонування, що підтримуються. ADU може бути колекцією з однієї або більше груп даних, які можуть бути використані, щоб допомогти вимірюванням. ADU може застосовуватися до одного або більше способів позиціонування в конкретному PMC. ADU може застосовуватися до множинних способів позиціонування і може бути ефективно відісланий один раз, щоб видавати дані допомоги в ці способи позиціонування (замість передачі окремо для кожного способу позиціонування). Наприклад, ADU d на Фіг. З може застосовуватися до способів позиціонування PMd і РМе і може бути відісланий один раз для цих двох способів позиціонування. ADU може застосовуватися до одного джерела опорного сигналу і може бути повторюваний для множинних джерел опорного сигналу одного і того ж типу, наприклад, щоб видавати або запитувати ефемеридні дані для множинних супутників в однієї і тієї ж SPS, різниці в реальному часі (різниць RTD) для множинних базових станцій одного і того ж типу доступу і т. д. Блоки ADU можуть дозволяти визначити можливості серверів визначення місцеположення і блоків позиціонування, наприклад, відносно того, які блоки ADU підтримує сервер визначення місцеположення або блок позиціонування. Блоки ADU можуть також дозволяти блоку 120 позиціонування запитувати сервер 130 визначення місцеположення, щоб видавати дані допомоги гнучким і точним способом. Блок 120 позиціонування може вказувати деякі характеристики ADU (наприклад, час дії або точність для ефемеридних даних GPS), при запитуванні його від сервера 130 визначення місцеположення. У одному виконанні можуть бути індивідуально ідентифіковані класи РМС, способи позиціонування, блоки MDU і/або блоки ADU. Ця ідентифікація може полегшувати можливості, конкретні вимірювання і конкретні дані допомоги, які повинні бути запитані і видані. Ідентифікація також може бути корисною, щоб ідентифікувати наявність конкретного MDU або ADU в повідомленні позиціонування, щоб ідентифікувати сегмент повідомлення, пов'язаний з конкретним способом позиціонування або РМС, і т. д. Ідентифікаційна інформація РМС може бути унікальною в протоколі позиціонування, тоді як ідентифікаційна інформація способів позиціонування, блоків MDU і блоків ADU може бути унікальною тільки для конкретного РМС. Різні діапазони ідентифікаторів можуть бути використані для ідентифікації. Наприклад, ID PMC 0 може бути зарезервований для можливої майбутньої сигналізації, що застосовується до всіх класів РМС, ідентифікатори ID PMC 1-63 можуть бути використані для основаних на мережі (висхідної лінії зв'язку) класів РМС, ідентифікатори ID PMC 64-127 можуть бути використані для класів РМС за допомогою терміналів і основаних на терміналі (низхідної лінії зв'язку), ідентифікатори ID PMC 128-191 можуть бути використані для специфічних для оператора способів позиціонування, ідентифікатори ID PMC 192-254 можуть бути використані для специфічних для постачальника способів позиціонування, і ID PMC 255 може бути використаний для вказування ідентифікаторів ID PMC більших ніж 255, якщо необхідно. Загалом, ідентифікатори ID можуть бути визначені будь-яким відповідним способом для класів РМС, способів позиціонування, блоків MDU і/або блоків ADU. У одному виконанні класи РМС калібрування можуть бути використані для видачі даних калібрування в сервер визначення місцеположення для одного або більше джерел опорного сигналу. Дане калібрування може призначатися: для (і) розподілу сигналів у часі і/або рівня сигналу для базових станцій, точок доступу і/або інших джерел опорного сигналу, (іі) даних розподілу у часі і навігації для систем GNSS і/або (ііі) інших сигналів і даних. Дане калібрування може бути використане сервером визначення місцеположення, щоб отримати дані допомоги, які можуть бути пізніше видані в блок позиціонування, щоб допомогти йому при виконанні вимірювань для визначення місцеположення цільового пристрою. Як приклад дане калібрування, яке включає в себе різниці у часі передачі між сусідніми базовими станціями, може бути використане сервером визначення місцеположення, щоб отримати дані допомоги (асистування) (наприклад, включаючи в себе приблизні різниці у часі між близькими базовими станціями, які цільовий пристрій має намір виміряти) для способів позиціонування різниці у часі низхідної лінії зв'язку, таких як OTDOA. Такі дані допомоги потім можуть бути пізніше відіслані в блок позиції, спільно розташований в цільовому пристрої. РМС калібрування (або спосіб позиціонування калібрування) може підтримувати відповідний нормальний РМС (або спосіб нормального позиціонування), як описано в прикладі вище, за допомогою надавання допомоги отриманню даних допомоги для нормального РМС (або способу нормального позиціонування) і за допомогою надавання допомоги обчисленню оцінки місцеположення для будь-якого способу позиціонування в нормальному РМС. Наприклад, РМС калібрування для вимірювання розподілу у часі зовнішнього eNB може підтримувати РМС LTE низхідної лінії зв'язку, що включає в себе способи позиціонування OTDOA і Е-CID. 8 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 Використання класів РМС калібрування як частина загального протоколу позиціонування, який також підтримує нормальні класи РМС, може дозволити використовувати загальний протокол позиціонування для калібрування джерел опорного сигналу і, таким чином, уникнути потреби в додаткових протоколах з цією метою. РМС калібрування може не безпосередньо підтримувати способи позиціонування будь-яких блоків ADU і позиціонування цільових пристроїв. РМС калібрування може підтримувати блоки MDU, які можуть бути видані за допомогою блоків позиціонування (наприклад, базових станцій або блоків LMU) для джерел опорного сигналу, застосовних до відповідного нормального РМС. Блоки MDU можуть бути використані сервером визначення місцеположення, щоб допомогти отримати блоки ADU для відповідного нормального РМС, а також допомогти обчислити оцінку місцеположення для способів позиції у відповідному нормальному РМС. У одному виконанні сервер 130 визначення місцеположення і цільовий пристрій 110 (або сервер 130 визначення місцеположення і блок 120 позиціонування) можуть бути залучені до сеансу визначення місцеположення, щоб отримати вимірювання або місцеположення для забезпечення даних допомоги і/або в інших цілях. Сеанс визначення місцеположення може також називатися сеансом LPP, сеансом позиціонування і т. д. Сеанс визначення місцеположення може включати в себе одну або більше транзакцій, які можуть також називатися транзакцією LPP і т. д. Кожна транзакція може охоплювати конкретну операцію, таку як обмін можливостями, передача даних допомоги, передача інформації місцеположення і т. д. Кожній транзакції може бути призначений ID транзакції, і всі повідомлення для цієї транзакції можуть включати в себе ID транзакції, щоб зв'язувати повідомлення з однією і тією ж транзакцією. У одному виконанні набір повідомлень позиціонування може бути визначений і використаний для зв'язку між серверами визначення місцеположення і іншими об'єктами. Повідомлення позиціонування можуть також називатися повідомленнями LPP, блоками даних протоколу LPP (блоками PDU) і т. д. Фіг, 4А показує структуру повідомлення 400 позиціонування. У цій структурі повідомлення 400 позиціонування включає в себе поле 410 версії протоколу позиціонування, поле 412 ID транзакції, поле 414 прапора кінця транзакції, поле 416 типу повідомлення і N елементів 420а420п інформації, де N може бути нулем або більше. Поле 410 може вказувати, яка версія протоколу позиціонування використовується для сеансу визначення місцеположення і може бути включене для узгодження використання однієї і тієї ж версії протоколу позиціонування двома об'єктами, залученими до сеансу визначення місцеположення. Об'єкт, що відсилає, може встановлювати поле 410 таким, що дорівнює найвищій версії, яку він підтримує. Об'єкт, що приймає, може повертати найвищу версію, яку він підтримує. Узгоджена версія може бути меншою з двох найвищих версій, що підтримуються цими двома об'єктами. Поле 412 може ідентифікувати транзакцію, до якої застосовується повідомлення позиціонування. Поле 412 може бути особливо відповідним, коли множинні транзакції мають місце одночасно під час сеансу місцеположення. Кожній транзакції може бути призначений унікальний ID транзакції. У одному виконанні породжуючий об'єкт, який ініціює транзакцію, може призначати ID транзакції для цієї транзакції. Об'єкт, що відповідає, може використовувати той же ID транзакції, відповідаючи породжуючому об'єкту. Наприклад, сервер 130 визначення місцеположення може призначати ідентифікатори ID транзакції на транзакції, ініційовані сервером 130 визначення місцеположення, і блок 120 позиціонування може призначати ідентифікатори ID транзакції транзакціям, ініційованим блоком 120 позиціонування. Коли використовується більше ніж один сервер визначення місцеположення для позиціонування цільового пристрою 110, кожному серверу визначення місцеположення може бути призначений відмінний діапазон ідентифікаторів ID транзакції, які можуть бути призначені цим сервером визначення місцеположення. Поле 414 може вказувати, чи завершив транзакцію об'єкт, що відсилає. Поле 416 може вказувати тип повідомлення, що відсилається. Набір типів повідомлення може підтримуватися, як описано нижче, і повідомлення 400 позиціонування може мати тип, позначений полем 416. Поля 420а-420п можуть включати в себе інформацію, яка може залежати від типу повідомлення. Кожне поле 420 може перенести компонент даних позиціонування (PDC) для одного РМС або способу позиціонування. Повідомлення 400 позиціонування може включати в себе множинні класи PDC, щоб ефективно передавати інформацію для більше ніж одного РМС за один раз і спричиняти об'єднане/гібридне позиціонування. Повідомлення позиціонування може також включати в себе різні і/або інші поля крім полів, показаних на Фіг. 4А. Наприклад, повідомлення позиціонування може включати в себе поле для 9 UA 100815 C2 ID сеансу, поле для вказування, чи діє відправник як сервер визначення місцеположення або блок позиціонування, і т. д. Таблиця 2 перелічує набір типів повідомлень позиціонування, які можуть підтримуватися відповідно до одного виконання. 5 Таблиця 2 Тип повідомлення позиціонування Тип повідомлення Запитати можливості Видати можливості Запитати дані допомоги Видати дані допомоги Запитати інформацію місцеположення Видати інформацію місцеположення 10 15 20 25 30 35 40 Опис Повідомлення для запиту можливостей об'єкта для протоколу позиціонування і способів позиціонування. Повідомлення для забезпечення можливостей об'єкта для протоколу позиціонування і способів позиціонування. Повідомлення для запиту даних допомоги. Повідомлення для видачі даних допомоги. Повідомлення для запиту інформації місцеположення. Повідомлення для видачі інформації місцеположення. Сервер 130 визначення місцеположення може забезпечувати (видавати) свої можливості, коли запитаний блоком 120 позиціонування або може відсилати свої можливості одностороннім способом, не приймаючи запиту. Аналогічно, блок 120 позиціонування може видавати свої можливості, коли запитаний сервером 130 визначення місцеположення або може відсилати свої можливості одностороннім способом, не приймаючи запиту. Можливості об'єкта (наприклад, сервера 130 визначення місцеположення або блока 120 позиціонування) можуть включати в себе класи РМС і способи позиціонування, що підтримуються цим об'єктом, і можливості об'єкта для кожного способу позиціонування, що підтримується, (наприклад, список блоків MDU, який може бути відісланий або прийнятий об'єктом, і/або список блоків ADU, який може бути відісланий або прийнятий об'єктом). Сервер 130 визначення місцеположення може видавати дані допомоги, коли запитані блоком 120 позиціонування або може відсилати дані допомоги одностороннім способом, не приймаючи запиту. Ці дані допомоги можуть допомогти блоку 120 позиціонування виробляти вимірювання, які можуть бути використані для позиціонування цільового пристрою 110 або для калібрування джерела 140 опорного сигналу. Сервер 130 визначення місцеположення може також видавати дані допомоги, коли дані змінюються для поточного способу позиціонування. Це автоматичне оновлення даних допомоги може дозволяти способу позиціонування повертатися в початкове положення, не маючи потреби явно блокувати і поновлювати його. Наприклад, цільовий пристрій 110 може змінювати обслуговуючий стільник (наприклад, через передачу обслуговування) під час способу позиціонування OTDOA, і сервер 130 визначення місцеположення може відсилати нові дані допомоги, застосовні до нового обслуговуючого стільника, щоб блок 120 позиціонування (в цільовому пристрої 110) отримував і передавав вимірювання різних сусідніх базових станцій, асоційованих з новим обслуговуючим стільником. Як інший приклад, блок 120 позиціонування (наприклад, LMU) може вимірювати дані і/або канали сигналізації, передані цільовим пристроєм 110 в конкретному обслуговуючому стільнику для позиціонування U-TDOA, і цільовий пристрій 110, може змінювати обслуговуючий стільник (наприклад, через передачу обслуговування). Сервер 130 визначення місцеположення може потім відсилати нові дані допомоги на блок 120 позиціонування, щоб дозволити йому вимірювати інші дані і/або канали сигналізації, асоційовані з новим обслуговуючим стільником. Наявність автоматичного оновлення може бути корисною в цих сценаріях. Блок 120 позиціонування може відсилати інформацію позиціонування на сервер 130 визначення місцеположення, щоб підтримувати позиціонування цільового пристрою 110 (наприклад, для нормального РМС) або визначення даних допомоги для майбутнього позиціонування (наприклад, для РМС калібрування). Інформація позиціонування може містити: (і) вимірювання, зроблені блоком 120 позиціонування в цільовому пристрої 110, для інших джерел опорного сигналу (наприклад, як показано на Фіг. 2А), (іі) вимірювання, зроблені блоком 120 позиціонування, зовнішнім відносно цільового пристрою 110, для джерела 140 опорного сигналу в цільовому пристрої 110 (наприклад, як показано на Фіг. 2В), (ііі) оцінку 10 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 місцеположення для цільового пристрою 110, отриману блоком 120 позиціонування, і/або (iv) іншу інформацію, пов'язану з місцеположенням цільового пристрою 110. Сервер 130 визначення місцеположення може відсилати інформацію місцеположення, що містить оцінку місцеположення для цільового пристрою 110 на блок 120 позиціонування, наприклад, якщо блок 120 позиціонування є частиною цільового пристрою 110, то цільовий пристрій 110 є призначеним кінцевим одержувачем оцінки місцеположення. Для калібрування джерела опорного сигналу інформація позиціонування може містити вимірювання, що проводяться блоком 120 позиціонування для основаних на мережі джерел опорного сигналу (наприклад, базових станцій) та інших ресурсів (наприклад, супутників). Повідомлення позиціонування може також включати в себе поле для загальних параметрів, застосовних до всіх класів РМС, що підтримуються відповідно до повідомлення позиціонування. Загальні параметри для повідомлення запиту можливостей і повідомлення видачі можливостей можуть включати в себе список ідентифікаторів, що підтримуються ID PMC, версій РМС і т. д. Ці загальні параметри для повідомлення запиту даних допомоги можуть включати в себе приблизне місцеположення цільового пристрою, індикацію того, чи запитуються або періодичні, або ініційовані дані допомоги і асоційовані параметри, первинний доступ (наприклад, ID обслуговуючого стільника), вторинні доступи (наприклад, ідентифікатори ID сусіднього стільника) і т. д. Загальні параметри для повідомлення видачі даних допомоги можуть включати в себе приблизне місцеположення цільового пристрою, поточний час і т. д. Загальні параметри для повідомлення запиту інформації місцеположення можуть включати в себе необхідну якість обслуговування (QoS) (наприклад, для місцеположення, точності вимірювання і/або часу відповіді), індикацію того, чи запитується або періодична, або ініційована інформація місцеположення і асоційовані параметри, тип місцеположення для способів позиціонування за допомогою термінала і/або основаних на терміналі, список необхідних або переважних ідентифікаторів ID PMC і версій РМС, і т. д. Загальні параметри для повідомлення видачі інформації місцеположення можуть включати в себеоцінку місцеположення і точність, час, швидкість і т. д. Фіг. 4В показує структуру повідомлення 450 позиціонування, яке включає в себе множинні частини, визначені різними організаціями. Повідомлення 450 позиціонування може включати в себе поле версії протоколу позиціонування, поле ID транзакції, поле прапора кінця транзакції, поле типу повідомлення і N елементів інформації, як описано вище відносно Фіг. 4А. В одному виконанні одна частина може бути відіслана в кожному елементі інформації. Наприклад, перша частина може містити першу інформацію для позиціонування, визначену першою організацією, друга частина може містити другу інформацію для позиціонування, визначену другою організацією, і т. д. Організація може бути 3GPP, 3GPP2, ОМА, робочою групою інженерів Інтернет IETF), інститутом інженерів по електроніці і електротехніки (IEEE), оператором мережі, постачальником обладнання і т. д. Множинні частини можуть призначатися для конкретного типу транзакції, наприклад, передачі можливостей, передачі даних допомоги, передачі інформації місцеположення і т. д. Ця структура може дозволяти зовнішній організації поліпшувати існуючий спосіб позиціонування або підтримувати нові способи позиціонування за допомогою визначення додаткових можливостей, які можуть перенестися в одній або більше додаткових частинах повідомлення позиціонування. У одному виконанні декілька пов'язаних транзакцій можуть бути викликані паралельно. Наприклад, блок 120 позиціонування може бути спільно розташований з цільовим пристроєм 110 (наприклад, як показано на Фіг. 2А) і може запитувати своє власне місцеположення від сервера 130 визначення місцеположення, запитувати дані допомоги від сервера 130 визначення місцеположення і видавати свої можливості серверу 130 визначення місцеположення, щоб дозволити серверу 130 визначення місцеположення отримати своє місцеположення. Як інший приклад, блок 120 позиціонування може бути спільно розташований з цільовим пристроєм 110 і може запитувати своє власне місцеположення від сервера 130 визначення місцеположення і може видавати вимірювання для одного або більше способів позиціонування (наприклад, E-CID і/або A-GNSS) серверу 130 визначення місцеположення, щоб дозволити серверу 130 визначення місцеположення дістати оцінку місцеположення. Повідомлення, відіслані блоком 120 позиціонування на сервер 130 визначення місцеположення в обох прикладах, описаних вище, також можуть бути об'єднані. Як інший приклад, сервер 130 визначення місцеположення може запитувати інформацію позиціонування від блока 120 позиціонування, який може бути спільно розташований з цільовим пристроєм 110, і може видавати дані допомоги в блок 120 позиціонування, щоб допомогти отримати інформацію позиціонування. 11 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 У одному виконанні множинні повідомлення позиціонування для множинних транзакцій можуть бути транспортовані разом в одній транзакції/обміні повідомленнями. У одному виконанні єдине контейнерне повідомлення може включати в себе множинні повідомлення позиціонування. Наприклад, контейнерне повідомлення може бути заздалегідь заданим повідомленням позиціонування, яке може перенести множинні повідомлення позиціонування у множинних елементах інформації, по одному елементу інформації для кожного індивідуального повідомлення позиціонування, У іншому виконанні множинні повідомлення позиціонування можуть бути пов'язані і відіслані окремо або послідовно, або паралельно. Загальний ідентифікатор може бути включений в кожне повідомлення, щоб дозволити окремим повідомленням асоціюватися в об'єкті прийому. Множинні повідомлення позиціонування також можуть бути транспортовані разом іншими способами. Формат і контент кожного повідомлення позиціонування можуть не залежати від того, чи відсилається це повідомлення позиціонування одне чи з іншими повідомленнями позиціонування. Об'єкт, що відсилає, може відсилати контейнерне повідомлення, що включає в себе множинні повідомлення позиціонування, для множинних транзакцій. Об'єкт одержувача може генерувати індивідуальні відповіді для множинних транзакцій і може використовувати асоціацію множинних повідомлень позиціонування для забезпечення більш відповідних відповідей, наприклад, використовуючи інформацію, що міститься у всіх прийнятих повідомленнях позиціонування, для генерування відповіді на кожне прийняте повідомлення. Об'єкт одержувача може повертати контейнерне повідомлення, що включає в себе множинні повідомлення позиціонування для індивідуальних відповідей. Транспортування множинних повідомлень позиціонування разом може забезпечувати різні переваги, такі як: (і) зменшення затримки і уникнення проблем через доставку повідомлень позиціонування не по порядку, якщо відсилаються окремо, і (іі) гарантія, що об'єкт, що приймає, має найбільшу кількість інформації, , необхідної для обробки і відповіді на кожне прийняте повідомлення. Фіг. 5 показує потік 500 повідомлень для служби вихідного від мобільного пристрою запиту місцеположення (MO-LR) в LTE. Клієнт LCS в UE 510 або користувач UE 510 може запитувати службу визначення місцеположення, наприклад, витягувати місцеположення UE 510 або передавати місцеположення UE третій особі. UE 510 може відсилати повідомлення запиту MOLR в об'єкт керування мобільністю (ММЕ) 540 через обслуговуючий вузол eNB 520 (етап 1). Повідомлення запиту MO-LR може бути використане як контейнерне повідомлення, щоб перенести одне або більше повідомлень позиціонування для ініціації однієї або більше процедур. Наприклад, повідомлення запиту MO-LR може включати в себе повідомлення позиціонування для забезпечення можливостей UE 510, повідомлення позиціонування для запиту даних допомоги, повідомлення позиціонування для забезпечення вимірювань і т. д. ММЕ 540 може відсилати повідомлення запиту місцеположення на E-SMLC 530 (етап 2). Повідомлення запиту місцеположення може включати в себе будь-яке повідомлення позиціонування, прийняте за допомогою ММЕ 540 на етапі 1. E-SMLC 530 і UE 510 можуть залучатися до сеансу визначення місцеположення і можуть виконувати одну або більше транзакцій (етап 3). Для цього сеансу визначення місцеположення UE 510 може бути цільовим пристроєм і блоком позиціонування, і E-SMLC 530 може бути сервером визначення місцеположення. E-SMLC 530 може ініціювати одну або більше транзакцій для отримання можливостей позиціонування UE 510, щоб видавати дані допомоги в UE 510 і/або отримувати інформацію позиціонування від UE 510. Після цього, як перше повідомлення позиціонування, прийняте від E-SMLC 530, UE 510 може ініціювати одну або більше транзакцій для запиту даних допомоги, запиту додаткових даних допомоги і т. д. E-SMLC 530 і eNB 520 можуть залучатися до сеансу визначення місцеположення і можуть виконувати одну або більше транзакцій (етап 4). Для цього сеансу визначення місцеположення eNB 520 може бути блоком позиціонування, і E-SMLC 530 може бути сервером визначення місцеположення. Е-SMLC 530 може отримувати інформацію позиціонування для UE 510 від eNB 520 за допомогою сеансу визначення місцеположення. Етапи 3 і 4 можуть мати місце в будьякому порядку або паралельно. E-SMLC 530 може повертати повідомлення відповіді місцеположення на ММЕ 540 (етап 5). Повідомлення відповіді місцеположення може включати в себе будь-яку оцінку місцеположення, отриману від етапів 3 і 4, і/або останнього повідомлення позиціонування, яке може забезпечувати оцінку місцеположення, якщо запитується за допомогою UE 510 на етапі 1. Якщо UE 510 запитало передачу місцеположення для третьої особи, то ММЕ 540 може передавати оцінку місцеположення, прийняту від E-SMLC 530, третій особі (етап 6). ММЕ 540 може відсилати на UE 510 повідомлення відповіді MO-LR, яке може перенести будь-яке останнє повідомлення позиціонування, прийняте на етапі 5, і/або окрему оцінку місцеположення (етап 7). 12 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 Для рішення місцеположення площини керування, мережевому об'єкту (наприклад, ММЕ 540) може бути необхідно запитати службу визначення місцеположення від сервера визначення місцеположення (наприклад, E-SMLC 530) до того, як сеанс визначення місцеположення зможе мати місце. Для служби MO-LR, цільовий пристрій (наприклад, UE 510) може спочатку відіслати повідомлення запиту MO-LR в мережевий об'єкт, щоб запитати службу визначення місцеположення. Цільовий пристрій може потім чекати відповідь від мережевого об'єкта і після цього може відсилати перше повідомлення позиціонування на сервер визначення місцеположення. Цієї додаткової затримки можна уникнути при наявності цільового пристрою, який включає перше повідомлення позиціонування в MO-LR повідомлення запиту, відіслане в мережевий об'єкт. Мережевий об'єкт може потім передавати це перше повідомлення позиціонування на сервер визначення місцеположення в повідомленні запиту місцеположення. Подальші повідомлення позиціонування можуть бути відіслані більш безпосередньо між цільовим пристроєм і сервером визначення місцеположення, не використовуючи рівень ярусу без надавання доступу (NAS), якому належить повідомлення запиту MO-LR. Останнє повідомлення позиціонування від сервера визначення місцеположення може бути відіслане або безпосередньо на цільовий пристрій, або за допомогою повідомлення відповіді MO-LR, яке може зменшувати загальну кількість повідомлень для передачі. Фіг. 6 показує потік 600 повідомлень для сеансу визначення місцеположення з множинними транзакціями. Потік 600 повідомлень може бути використаний для сеансу визначення місцеположення на етапі 3 і/або сеансу визначення місцеположення на етапі 4 на Фіг. 5. Цільовий пристрій 110 може відсилати повідомлення запиту MO-LR на сервер 130 визначення місцеположення (етап 1). Повідомлення запиту MO-LR може перенести одне або більше повідомлень позиціонування, щоб ініціювати одну або більше процедур. Повідомлення позиціонування може включати в себе необхідну QoS, чи запитується ініційоване або періодичне місцеположення, і/або іншу інформацію. Сервер 130 визначення місцеположення може відсилати повідомлення позиціонування для запиту можливостей позиціонування цільового пристрою 110, якщо ці можливості позиціонування не прийняті на етапі 1 (етап 2). Цільовий пристрій 110 може повертати повідомлення позиціонування зі своїми можливостями позиціонування, наприклад, способи позиціонування, що підтримуються (етап 3). Сервер 130 визначення місцеположення може відсилати повідомлення позиціонування для запиту інформації позиціонування, наприклад, пов'язаних з місцеположенням вимірювань, для способів позиціонування, що підтримуються цільовим пристроєм 110 (етап 4). Цільовий пристрій 110 може відсилати повідомлення позиціонування, щоб запитувати дані допомоги (етап 5). Сервер 130 визначення місцеположення може повертати повідомлення позиціонування із запитаними даними допомоги (етап 6). Сервер 130 визначення місцеположення може також відсилати одне або більше подальших повідомлень позиціонування з оновленими даними допомоги (не показані на Фіг. 6), наприклад, коли ініційовані за допомогою змін або з періодичним інтервалом. Цільовий пристрій 110 може отримувати інформацію позиціонування (наприклад, вимірювання) і може відсилати повідомлення позиціонування з інформацією позиціонування (етап 7). Цільовий пристрій 110 може також відсилати одне або більше подальших повідомлень позиціонування з оновленою інформацією місцеположення (не показана на Фіг. 6), наприклад, коли ініційовані за допомогою змін або з періодичним інтервалом. Сервер 130 визначення місцеположення може обчислювати оцінку місцеположення для цільового пристрою 110, використовуючи інформацію позиціонування, прийняту на етапі 7. Сервер 130 визначення місцеположення може потім відсилати повідомлення відповіді MO-LR, яке може включати в себе повідомлення позиціонування і/або оцінку місцеположення, на цільовий пристрій 110 (етап 8). Сервер 130 визначення місцеположення може також відсилати одне або більше подальших повідомлень позиціонування з оновленими оцінками місцеположення (не показані на Фіг. 6), наприклад, коли ініційовані за допомогою деяких подій або з періодичним інтервалом, або після прийому додаткової інформації позиціонування від цільового пристрою, і т. д. Фіг. 6 показує зразковий сеанс визначення місцеположення з трьома явними транзакціями А, В і С. В цілому, сеанс визначення місцеположення може включати в себе будь-яку кількість транзакцій і будь-який тип транзакції. Множинні транзакції одного і того ж типу також можуть бути виконані. Наприклад, транзакція для отримання інформації позиціонування від цільового пристрою, щоб підтримати позиціонування E-CID, може бути виконана для отримання приблизного місцеположення, і транзакція, асоційована з окремої A-GNSS, може бути виконана паралельно або послідовно для отримання точного місцеположення. 13 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 6 показує потік повідомлень для служби MO-LR. Потік повідомлень для служби завершеного мобільним пристроєм запиту місцеположення (MT-LR) може бути визначений етапами 2-7 на Фіг. 6. Як показано на Фіг. 6, може бути виконаний ряд транзакцій. Транзакція може залучати пару повідомлень позиціонування, що обмінюються між блоком позиціонування в цільовому пристрої 110 і сервером 130 визначення місцеположення, як показано на Фіг. 6. Транзакція може також залучати єдине повідомлення позиціонування, відіслане одностороннім способом за допомогою одного об'єкта. Наприклад, блок позиціонування в цільовому пристрої 110 може одностороннім способом забезпечувати свої можливості, не приймаючи запит можливостей, і сервер 130 визначення місцеположення може одностороннім способом видавати дані допомоги, не приймаючи запит даних допомоги. Множинні повідомлення позиціонування для множинних транзакцій можуть агрегуватися і передаватися разом. Наприклад, повідомлення позиціонування на етапах 2 і 4 можуть бути передані разом, повідомлення позиціонування на етапах З і 5 можуть бути передані разом, і т. д. Фіг. 7 показує структуру процесу 700 для підтримки позиціонування за допомогою сервера визначення місцеположення. Сервер визначення місцеположення може отримувати інформацію позиціонування для цільового пристрою за допомогою загального протоколу позиціонування, яким може бути LPP, або деякого іншого протоколу позиціонування (етап 712). Сервер визначення місцеположення може постійно знаходитися в одному з множини можливих об'єктів, і цільовий пристрій може бути одним з цих об'єктів. Наприклад, сервер визначення місцеположення може постійно знаходитися в мережевому об'єкті або може бути спільно розташований з цільовим пристроєм. Сервер визначення місцеположення може використовувати загальний протокол позиціонування незалежно від того, де він постійно знаходиться, і може зв'язуватися з іншими об'єктами за допомогою загального протоколу позиціонування. Загальний протокол позиціонування може просто означати, що один і той же протокол позиціонування використовується незалежно від того, де постійно знаходиться сервер визначення місцеположення. Сервер визначення місцеположення може визначати інформацію місцеположення для цільового пристрою (етап 714). У одному виконанні інформація позиціонування може містити вимірювання щонайменше для одного джерела опорного сигналу. Наприклад, сервер визначення місцеположення може отримувати вимірювання щонайменше для одного сигналу від щонайменше одного супутника, або щонайменше однієї базової станції, або щонайменше одного термінала, або цільового пристрою, або деякого іншого об'єкта, або їх комбінації. Інформація місцеположення може містити оцінку місцеположення для цільового пристрою, який може бути визначений сервером визначення місцеположення на основі вимірювань. У іншому виконанні інформація позиціонування: (і) може вказувати місцеположення цільового пристрою, наприклад, може містити грубу або точну оцінку місцеположення, або (іі) може містити вимірювання джерел опорного сигналу, які можуть бути прийняті в місцеположенні цільового пристрою. Інформація місцеположення може містити дані допомоги, визначені сервером визначення місцеположення на основі інформації позиціонування. У ще одному виконанні інформація місцеположення може містити дані допомоги, та інформація позиціонування може містити вимірювання, зроблені на основі даних допомоги. Загалом, інформація позиціонування може містити вимірювання, оцінку місцеположення і т. д. Інформація місцеположення може містити оцінку місцеположення, дані допомоги і т. д. Два етапи на Фіг. 7 можуть бути виконані в порядку, показаному на Фіг. 7. або в протилежному порядку. Інформація місцеположення може бути визначена на основі інформації позиціонування, або навпаки. У одному виконанні блок позиціонування для цільового пристрою може визначати інформацію позиціонування, наприклад, виконувати вимірювання. Блок позиціонування може постійно знаходитися в одному з другої множини можливих об'єктів, і цільовий пристрій може бути одним з цих об'єктів. Сервер визначення місцеположення може зв'язуватися з блоком позиціонування за допомогою загального протоколу позиціонування. Наприклад, сервер визначення місцеположення може обмінюватися можливостями або даними допомоги, або інформацією місцеположення, або їх комбінацією з блоком позиціонування за допомогою загального протоколу позиціонування. Фіг. 8 показує структуру процесу 800 для підтримки позиціонування за допомогою об'єкта, який може бути цільовим пристроєм або блоком позиціонування, або деяким іншим об'єктом. Об'єкт може відсилати інформацію позиціонування для цільового пристрою на сервер визначення місцеположення за допомогою загального протоколу позиціонування (етап 812). Сервер визначення місцеположення може постійно знаходитися в одному з множини можливих об'єктів і може використовувати загальний протокол позиціонування незалежно від того, де він 14 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 постійно знаходиться. Цільовий пристрій може бути одним з множини можливих об'єктів. Об'єкт може приймати інформацію місцеположення для цільового пристрою від сервера визначення місцеположення (етап 814). У одному виконанні інформація позиціонування може містити вимірювання щонайменше для одного джерела опорного сигналу, та інформація місцеположення може містити оцінку місцеположення для цільового пристрою, визначеного сервером визначення місцеположення на основі вимірювань. У іншому виконанні інформація позиціонування може містити вимірювання джерел опорного сигналу, які можуть бути прийняті в місцеположенні цільового пристрою, та інформація місцеположення може містити дані допомоги, визначені сервером визначення місцеположення на основі інформації позиціонування. У ще одному виконанні інформація місцеположення може містити дані допомоги, і інформація позиціонування може містити вимірювання, що проводяться на основі даних допомоги. У цьому виконанні етап 812 може мати місце після етапу 814. У одному виконанні об'єкт може вимірювати щонайменше один сигнал щонайменше від одного джерела опорного сигналу для отримання вимірювань. У одному виконанні щонайменше одне джерело опорного сигналу може містити щонайменше один супутник або щонайменше одну базову станцію, або щонайменше один термінал, або їх комбінацію. У цьому виконанні вимірювання можуть вироблятися в цільовому пристрої. У іншому виконанні щонайменше одне джерело опорного сигналу може містити цільовий пристрій і, можливо, інші джерела опорного сигналу. У цьому виконанні вимірювання можуть бути зроблені у блоці позиціонування, який є зовнішнім відносно цільового пристрою. Фіг. 9 показує структуру процесу 900 для підтримки позиціонування за допомогою об'єкта, який може бути сервером визначення місцеположення, блоком позиціонування, цільовим пристроєм або деяким іншим об'єктом. Об'єкт може обмінюватися (наприклад, відсилати або приймати) множиною повідомлень позиціонування, що транспортуються разом в одній транзакції повідомлення (етап 912). У одному виконанні об'єкт може відсилати множину повідомлень позиціонування як пов'язані повідомлення або в єдиному контейнерному повідомленні. У іншому виконанні об'єкт може приймати множину повідомлень позиціонування, які можуть бути відіслані як пов'язані повідомлення або в єдиному контейнерному повідомленні. Об'єкт може виконувати позиціонування на основі множини повідомлень позиціонування (етап 914). У одному виконанні множина повідомлень позиціонування може бути відіслана з повідомленням MO-LR за допомогою цільового пристрою, щоб ініціювати позиціонування. У іншому виконанні множина повідомлень позиціонування може бути відіслана за допомогою сервера визначення місцеположення і може містити: (і) перше повідомлення позиціонування, що переносить дані допомоги, і (іі) друге повідомлення позиціонування, що запитує інформацію місцеположення. У ще одному виконанні множина повідомлень позиціонування може бути відіслана на сервер визначення місцеположення (наприклад, блок позиціонування або цільовий пристрій) і може містити: (і) перше повідомлення позиціонування, що запитує дані допомоги і (іі) друге повідомлення позиціонування, що переносить вимірювання. Множина повідомлень може також включати в себе деяку іншу комбінацію повідомлень. У одному виконанні кожне з множини повідомлень позиціонування може мати один з множини типів повідомлення, які можуть включати в себе тип повідомлення запиту можливостей, тип повідомлення забезпечення можливостей, тип повідомлення запиту даних допомоги, тип повідомлення видачі даних допомоги, тип повідомлення запиту інформації місцеположення і тип повідомлення видачі інформації місцеположення. Множина повідомлень позиціонування може включати в себе повідомлення позиціонування щонайменше двох типів повідомлення. Фіг. 10 показує структуру процесу 1000 для підтримки позиціонування за допомогою об'єкта, який може бути сервером визначення місцеположення, блоком позиціонування, цільовим пристроєм або деяким іншим об'єктом. Об'єкт може обмінюватися повідомленням позиціонування, що містить першу частину і другу частину для конкретного типу транзакції (етап 1012). Перша частина може містити першу інформацію для позиціонування, визначену першою організацією, і друга частина може містити другу інформацію для позиціонування, визначену другою організацією. Наприклад, першою організацією може бути 3GPP або деяка інша організація. Другою організацією може бути 3GPP2, ОМА, IETF, IEEE, оператор мережі, постачальник обладнання або деяка інша організація. Об'єкт може виконувати позиціонування на основі повідомлення позиціонування (етап 1014). У одному виконанні етапу 1012 об'єкт може бути цільовим пристроєм, що відсилає повідомлення позиціонування на або, що приймає повідомлення позиціонування від сервера 15 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 визначення місцеположення. У іншому виконанні об'єкт може бути сервером визначення місцеположення, що відсилає повідомлення позиціонування на або, що приймає повідомлення позиціонування від цільового пристрою. У одному виконанні етапу 1014 об'єкт може визначати дані допомоги або оцінку визначення місцеположення на основі першої інформації (наприклад, вимірювань) в першій частині і другій інформації (наприклад, більшої кількості вимірювань або грубої оцінки визначення місцеположення) у другій частині. У іншому виконанні об'єкт може виконувати вимірювання на основі першої інформації (наприклад, даних допомоги для супутників) в першій частині і другій інформації (наприклад, даних допомоги для базових станцій) у другій частині. Фіг. 11 показує структуру процесу 1100 для підтримки позиціонування за допомогою об'єкта, який може бути сервером визначення місцеположення, блоком позиціонування, цільовим пристроєм або деяким іншим об'єктом. Об'єкт може обмінюватися блоком даних вимірювання, застосовним до першої множини способів позиціонування, за допомогою кожного з першої множини способів позиціонування, асоційованих з різним набором застосовних блоків даних вимірювання (етап 1112). Наприклад, обмінний блок даних вимірювання може бути MDU 2 на Фіг. З, перша множина способів позиціонування може включати в себе РМа і РМb, спосіб позиціонування РМа може бути асоційований з першим набором блоків MDU 1, 2 і 3, і спосіб позиціонування РМb може бути асоційований з другим набором блоків MDU 2 і 3. Об'єкт може виконувати позиціонування на основі обмінного блока даних вимірювання і відповідно до способу позиціонування, який може бути одним з першої множини способів позиціонування (етап 1114). Альтернативно або додатково, об'єкт може обмінюватися блоком даних допомоги, застосовним до другої множини способів позиціонування, за допомогою кожного з другої множини способів позиціонування, асоційованих з різним набором застосовних блоків даних допомоги (етап 1116). Об'єкт може виконувати позиціонування на основі обмінного блока даних допомоги і відповідно до способу позиціонування, який може бути одним з другої множини способів позиціонування (етап 1118). Загалом, можуть підтримуватися тільки спільно використовувані блоки даних вимірювання, або можуть підтримуватися тільки спільно використовувані блоки даних допомоги, або можуть підтримуватися як спільно використовувані блоки вимірювання так і даних допомоги. Якщо підтримуються тільки спільно використовувані блоки даних вимірювання, то можуть бути виконані етапи 1112 і 1114, а етапи 1116 і 1118 можуть бути опущені. Якщо підтримуються тільки спільно використовувані блоки даних допомоги, то можуть бути виконані етапи 1116 і 1118, а етапи 1112 і 1114 можуть бути опущені. Якщо підтримуються як спільно використовувані блоки вимірювання і даних допомоги, то можуть бути виконані етапи 1112-1118. Фіг. 12 показує блок-схему структури цільового пристрою 110, базової станції 122 і сервера 130 визначення місцеположення. Цільовий пристрій 110 може бути UE, SET і т. д. Сервер 130 визначення місцеположення може бути SMLC, Е-SMLC, SLP і т. д. Блок 120 позиціонування може постійно знаходитися в цільовому пристрої 110, базовій станції 122 або деякому іншому об'єкті. Джерело 140 опорного сигналу може бути частиною базової станції 122 або супутником, або деяким іншим об'єктом. Для простоти Фіг. 12 показує тільки один контролер/процесори 1220, одну пам'ять 1222 і один передавач/приймач (TMTR/RCVR) 1224 для цільового пристрою 110, тільки один контролер/процесор 1230, одну пам'ять 1232, один передавач/приймач 1234 і один блок 1236 зв'язку (Comm) для базової станції 122, і тільки один контролер/процесор 1240, одну пам'ять 1242 і один блок 1244 зв'язку для сервера визначення місцеположення 130. Загалом, кожний об'єкт може включати в себе будь-яку кількість блоків обробки (процесори, контролери і т. д.), блоків пам'яті, передавачів/приймачів, блоків зв'язку і т. д. По низхідній лінії зв'язку базова станція 122 може передавати дані, сигналізацію і пілотсигнал на термінали в своїй зоні охоплення. Ці різні типи інформації можуть оброблятися блоком 1230 обробки, приводитися до необхідних умов передавачем 1234 і передаватися по низхідній лінії зв'язку. У цільовому пристрої 110 сигнали низхідної лінії зв'язку від базової станції 122 та інших базових станцій можуть прийматися і приводитися до необхідних умов приймачем 1224 і додатково оброблятися блоком 1220 обробки, щоб отримати різні типи інформації. Блок 1220 обробки може виконувати процес 800 на Фіг. 8, процес 900 на Фіг. 9, процес 1000 на Фіг. 10, процес 1100 на Фіг. 11 і/або інші процеси для способів, описаних в даному описі. Блоки пам'яті 1222 і 1232 можуть зберігати програмні коди і дані для цільового пристрою 110 і базової станції 122 відповідно. По висхідній лінії зв'язку цільовий пристрій 110 може передавати дані, сигналізацію і пілот-сигнал на базову станцію 122. Ці різні типи інформації можуть оброблятися блоком 1220 обробки, приводитися до необхідних умов передавачем 1224 і передаватися по висхідній лінії зв'язку. У базовій станції 122 сигнали висхідної лінії зв'язку від цільового пристрою 16 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 110 та інших терміналів можуть прийматися і приводитися до необхідних умов приймачем 1234 і додатково оброблятися блоком 1230 обробки, щоб отримати різні типи інформації від терміналів. Базова станція 122 може безпосередньо або непрямо зв'язуватися із сервером 130 визначення місцеположення за допомогою блока 1236 зв'язку. У сервері 130 визначення місцеположення блок 1240 обробки може виконувати обробку для підтримки служб визначення місцеположення і позиціонування для терміналів. Наприклад, блок 1240 обробки може виконувати процес 700 на Фіг. 7, процес 800 на Фіг. 8, процес 900 на Фіг. 9, процес 1000 на Фіг. 10, процес 1100 на Фіг. 11 і/або інші процеси для способів, описаних в даному описі. Блок 1240 обробки може також обчислювати оцінки визначення місцеположення для цільового пристрою 110, видавати інформацію місцеположення і т. д. Пам'ять 1242 може зберігати програмні коди і дані для сервера визначення місцеположення 130. Блок 1244 зв'язку може дозволяти серверу 130 визначення місцеположення зв'язуватися з базовою станцією 122 і/або іншими мережевими об'єктами. Сервер 130 визначення місцеположення і цільовий пристрій 110 можуть обмінюватися повідомленнями позиціонування за допомогою базової станції 122 та інших мережевих об'єктів (не показані). Блок 120 позиціонування може постійно знаходитися в терміналі 110 або базовій станції 122, або сервері 130 визначення місцеположення. У цьому випадку обробка за допомогою блока 120 позиціонування може бути виконана блоком 1220, 1230 або 1240 обробки відповідно. Блок 120 позиціонування може також бути зовнішнім відносно об'єктів, показаних на Фіг. 12. У цьому випадку, блок 120 позиціонування може включати в себе один або більше блоків обробки (процесори, контролери і т. д.), блоків пам'яті, передавачів/приймачів, блоків зв'язку і т. д., які можуть виконувати необхідні функції. Фахівці в даній галузі техніки зрозуміють, що інформація і сигнали можуть бути представлені, використовуючи будь-яку множину різних технологій і способів. Наприклад, дані, інструкції, команди, інформація, сигнали, біти, символи і елементи сигналу, на які можна посилатися протягом усього вищезазначеного опису, можуть бути представлені напруженнями, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками, або будь-якою їх комбінацією. Фахівці в даній галузі техніки додатково оцінять, що різні ілюстративні логічні блоки, модулі, схеми і етапи алгоритму, описані спільно з розкриттям в даному описі, можуть бути реалізовані як електронне апаратне забезпечення, програмне забезпечення або їх комбінації. Щоб ясно ілюструвати цю взаємозамінність апаратного забезпечення і програмного забезпечення, різні ілюстративні компоненти, блоки, модулі, схеми і етапи були описані вище загалом відносно їх функціональних можливостей. Чи реалізовані такі функціональні можливості як апаратне забезпечення або програмне забезпечення, залежить від конкретного додатку і обмежень структури, накладених на повну систему. Фахівці в даній галузі техніки можуть реалізовувати описані функціональні можливості різними способами для кожного конкретного додатку, але такі рішення реалізації не повинні інтерпретуватися як такі, що спричиняють відхилення від об'єму даного опису. Способи визначення позиції, описані в даному описі, можуть бути реалізовані в зв'язку з різними мережами бездротового зв'язку, такими як бездротова глобальна мережа (WWAN), бездротова локальна мережа (WLAN), бездротова персональна мережа (WPAN) і т. д. Термін "мережа" і "система" часто використовується взаємозамінно. WWAN може бути мережею множинного доступу з кодовим розділенням каналів (CDMA), мережею множинного доступу з часовим розділенням каналів (TDMA), мережею множинного доступу з частотним розділенням каналів (FDMA), мережею множинного доступу з ортогональним частотним розділенням каналів (OFDMA), мережею множинного доступу з частотним розділенням каналів і єдиною несучою (SC-FDMA), мережею проекту довгострокового розвитку (LTE), мережею WiMAX (IEEE 802.16) і т. д. Мережа CDMA може реалізовувати одну або більше радіо-технологій доступу (технології RAT), такі як cdma2000, широкосмуговий CDMA (W-CDMA) і т. д. Cdma2000 включає в себе стандарти IS-95, IS-2000 і IS-856. Мережа TDMA може реалізувати глобальну систему мобільного зв'язку (GSM), цифрову розвинену мобільну телефонну службу (D-AMPS) або деяку іншу RAT. GSM і W-CDMA описуються в документах від консорціуму "Проект партнерства третього покоління" (3GPP). Cdma2000 описується в документах від консорціуму "Проект партнерства третього покоління 2" (3GPP2). Документи 3GPP і 3GPP2 є суспільно доступними. WLAN може бути мережею IEEE 802.1 їх, і WPAN може бути мережею Bluetooth, IEEE 802.15х або деяким іншим типом мережі. Способи також можуть бути реалізовані в зв'язку з будь-якою комбінацією WWAN, WLAN і/або WPAN. Супутникова система позиціонування (SPS) звичайно включає в себе систему передавачів, позиціонованих так, щоб дозволити об'єктам визначати своє місцеположення на або вище 17 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 60 Землі на основі, щонайменше частково, сигналів, прийнятих від передавачів. Такий передавач звичайно передає сигнал, -маркірований псевдовипадковим шумовим кодом, що повторюється, (PN), встановленого набору елементів, сигналу, і може бути розташований на розташованих на землі станціях керування, користувацькому обладнанні і/або космічних транспортних засобах. У конкретному прикладі такі передавачі можуть бути розташовані на супутникових транспортних засобах (засобах SV), що обертаються навколо Землі. Наприклад, SV в сукупності глобальної навігаційної супутникової системи (GNSS), такої як глобальна супутникова навігаційна система (GPS), Galileo, Glonass або Compass, можуть передавати сигнал, позначений кодом PN, який відрізняється від кодів PN, переданих іншими засобами SV в сукупності (наприклад, використовуючи різні коди PN для кожного супутника як в GPS або використовуючи один і той же код по різних частотах, як в Glonass). Відповідно до деяких аспектів, способи, представлені в даному описі, не обмежуються глобальними системами (наприклад, GNSS) для SPS. Наприклад, способи, забезпечені в даному описі, можуть бути застосовані або інакше дозволені для використання в різних регіональних системах, таких як, наприклад, квазізенітна супутникова система (QZSS) по Японії, індійська регіональна навігаційна супутникова система (IRNSS) по Індії, Beidou по Китаю і т. д., і/або різних системах збільшення (наприклад, супутниковій системі контролю і корекції (SBAS)), які можуть бути асоційовані або інакше дозволені для використання з однією або більше глобальними і/або регіональними навігаційними супутниковими системами. За допомогою прикладу, а не обмеження, SBAS може включати в себе систему(и) збільшення, яка видає інформацію цілісності, відмітні корекції і т. д… такі як, наприклад, система панорамного огляду (WAAS), європейська геостаціонарна служба навігаційного покриття (EGNOS), багатофункціональна супутникова система збільшення (MSAS), Geo збільшена навігація з функцією GPS або GPS і Geo збільшена навігаційна система (GAGAN) і/або подібне. Таким чином, як використовується в даному описі, SPS може включати в себе будь-яку комбінацію однієї або більше глобальних і/або регіональних навігаційних супутникових систем і/або систем збільшення, і сигнали SPS можуть включати в себе SPS, подібні SPS і/або інші сигнали, асоційовані з однією або більше SPS. Способи, описані в даному описі, можуть бути реалізовані різними засобами залежно від застосування. Наприклад, ці способи можуть бути реалізовані в апаратному забезпеченні, програмно-апаратному забезпеченні, програмному забезпеченні або будь-якій їх комбінації. Для реалізації, що включає апаратне забезпечення, блоки обробки можуть бути реалізовані в одній або більше спеціалізованих інтегральних схемах (схемах ASIC), цифрових сигнальних процесорах (процесорах DSP), пристроях цифрової обробки сигналів (пристроях DSPD), програмованих логічних пристроях (пристроях PLD), програмованих користувачем вентильних матрицях (матрицях FPGA), процесорах, контролерах, мікроконтролерах, мікропроцесорах, інших електронних блоках, сконструйованих для виконання функцій, описаних в даному описі, або їх комбінації. Для реалізації, що включає програмно-апаратне забезпечення і/або програмне забезпечення, способи можуть бути реалізовані модулями (наприклад, процедурами, функціями і т. д.), які виконують функції, описані в даному описі. Будь-який машинозчитуваний носій, що матеріально втілює команди, може бути використаний при реалізації способів, описаних в даному описі. Наприклад, коди програмного забезпечення можуть бути збережені в пам'яті і виконані блоком обробки. Пам'ять може бути реалізована в блоці обробки або зовні відносно блока обробки. Використовуваний в даному описі термін "пам'ять" належить до будь-якого типу довгострокової, короткострокової, енергозалежної, енергонезалежної або іншої пам'яті і не повинен бути обмежений ніяким конкретним типом пам'яті або кількістю блоків пам'яті, або типом носіїв, на яких зберігається пам'ять. Якщо реалізовуються в програмно-апаратному забезпеченні і/або програмному забезпеченні, функції можуть бути збережені як одна або більше команд або код на комп'ютерозчитуваному носії. Приклади включають в себе комп'ютерозчитувані носії, закодовані структурою даних, і комп'ютерозчитувані носії, закодовані комп'ютерною програмою. Комп'ютерозчитувані носії можуть приймати форму виробу виготовлення. Комп'ютерозчитувані носії включають в себе фізичні комп'ютерні носії даних. Запам'ятовуючий носій може бути будьяким доступним носієм, до якого може отримати доступ комп'ютер. За допомогою прикладу, а не обмеження, такі комп'ютерозчитувані носії можуть містити RAM, ROM, EEPROM, CD-ROM або інший запам'ятовуючий пристрій на оптичних дисках, запам'ятовуючий пристрій на магнітних дисках або інші магнітні запам'ятовуючі пристрої, або будь-який інший носій, який може бути використаний, щоб зберігати бажаний програмний код у формі команд або структур даних, і який може бути доступним за допомогою комп'ютера; диск (disk) і диск (disc), які використовуються в даному описі, включають в себе компакт-диск (CD), лазерний диск, 18 UA 100815 C2 5 10 15 20 оптичний диск, універсальний цифровий диск (DVD), дискету і диск blue-ray, де диски (disks) звичайно відтворюють дані магнітним способом, в той час як диски (discs) відтворюють дані оптичним чином за допомогою лазерів. Комбінації вищезазначеного також повинні бути включені в поняття комп'ютерозчитуваних носіїв. Додатково до зберігання на комп'ютерозчитуваному носії команди і/або дані можуть бути забезпечені як сигнали на носіях передачі, включених в пристрій зв'язку. Наприклад, пристрій зв'язку може включати в себе приймач-передавач, що має сигнали, які вказують команди і дані. Команди і дані конфігуруються для того, щоб спонукати один або більше блоків обробки реалізовувати функції, викладені у формулі винаходу. Таким чином, пристрій зв'язку включає в себе носії передачі з сигналами, які вказують інформацію для виконання розкритих функцій. У перший раз носії передачі, включені в пристрій зв'язку, можуть включати в себе першу частину інформації, щоб виконувати розкриті функції, в той час як у другий раз носії передачі, включені в пристрій зв'язку, можуть включати в себе другу частину інформації, щоб виконувати розкриті функції. Попередній опис розкриття забезпечується, щоб дозволити будь-якому фахівцеві в даній галузі техніки зробити або використати розкриття. Різні модифікації до розкриття будуть з готовністю очевидні для фахівців в даній галузі техніки, і типові принципи, визначені в даному описі, можуть бути застосовані до інших змін, не відступаючи від зони розкриття. Таким чином, це розкриття не призначається, щоб бути обмеженим прикладами і структурами, описаними в даному описі, але повинно отримати найширший об'єм, сумісний з принципами і новими ознаками, розкритими в даному описі. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 60 1. Спосіб для бездротового зв'язку, який включає: отримання інформації позиціонування для цільового пристрою за допомогою сервера визначення місцеположення за допомогою загального протоколу позиціонування, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, і цільовий пристрій є одним з множини можливих об'єктів; і визначення інформації місцеположення для цільового пристрою за допомогою сервера визначення місцеположення. 2. Спосіб за пунктом 1, в якому інформація позиціонування містить вимірювання для щонайменше одного джерела опорного сигналу, і в якому інформація місцеположення містить оцінку місцеположення для цільового пристрою, визначену сервером визначення місцеположення на основі вимірювань. 3. Спосіб за пунктом 1, в якому інформація позиціонування вказує місцеположення цільового пристрою, і в якому інформація місцеположення містить дані допомоги, визначені сервером визначення місцеположення на основі інформації позиціонування. 4. Спосіб за пунктом 1, в якому інформація позиціонування містить вимірювання джерел опорного сигналу, які можуть бути прийняті в місцеположенні цільового пристрою, і в якому інформація місцеположення містить дані допомоги, визначені сервером визначення місцеположення на основі інформації позиціонування. 5. Спосіб за пунктом 1, в якому інформація місцеположення містить дані допомоги, і в якому інформація позиціонування містить вимірювання, отримані на основі даних допомоги. 6. Спосіб за пунктом 1, в якому інформація позиціонування для цільового пристрою містить вимірювання для щонайменше одного сигналу від щонайменше одного супутника або щонайменше однієї базової станції, або щонайменше одного термінала, або цільового пристрою, або їх комбінації. 7. Спосіб за пунктом 1, в якому сервер визначення місцеположення постійно знаходиться в мережевому об'єкті. 8. Спосіб за пунктом 1, в якому сервер визначення місцеположення спільно розташований з цільовим пристроєм. 9. Спосіб за пунктом 1, в якому інформація позиціонування для цільового пристрою отримана блоком позиціонування, що постійно знаходиться в одному з другої множини можливих об'єктів, причому цільовий пристрій є одним з другої множини можливих об'єктів. 10. Спосіб за пунктом 9, який додатково включає здійснення зв'язку з блоком позиціонування за допомогою сервера визначення місцеположення за допомогою загального протоколу позиціонування. 19 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 11. Спосіб за пунктом 9, який додатково включає виконання обміну можливостями або даними допомоги, або інформацією місцеположення, або їх комбінацією з блоком позиціонування за допомогою загального протоколу позиціонування. 12. Пристрій для бездротового зв'язку, який містить: засіб для отримання інформації позиціонування для цільового пристрою за допомогою сервера визначення місцеположення за допомогою загального протоколу позиціонування, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, і цільовий пристрій є одним з множини можливих об'єктів; і засіб для визначення інформації місцеположення для цільового пристрою за допомогою сервера визначення місцеположення. 13. Пристрій за пунктом 12, в якому інформація позиціонування для цільового пристрою отримується блоком позиціонування, що постійно знаходиться в одному з другої множини можливих об'єктів, причому цільовий пристрій є одним з другої множини можливих об'єктів. 14. Пристрій за пунктом 13, який додатково містить засіб для обміну можливостями або даними допомоги, або інформацією місцеположення, або їх комбінацією з блоком позиціонування за допомогою загального протоколу позиціонування. 15. Пристрій для бездротового зв'язку, який містить: щонайменше один блок обробки, сконфігурований для отримання інформації позиціонування для цільового пристрою за допомогою сервера визначення місцеположення за допомогою загального протоколу позиціонування, і для визначення інформації місцеположення для цільового пристрою за допомогою сервера визначення місцеположення, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, і цільовий пристрій є одним з множини можливих об'єктів. 16. Пристрій за пунктом 15, в якому інформація позиціонування для цільового пристрою отримується блоком позиціонування, що постійно знаходиться в одному з другої множини можливих об'єктів, причому цільовий пристрій є одним з другої множини можливих об'єктів. 17. Пристрій за пунктом 16, в якому щонайменше один блок обробки сконфігурований для обміну можливостями або даними допомоги, або інформацією місцеположення, або їх комбінацією з блоком позиціонування за допомогою загального протоколу позиціонування. 18. Комп'ютерозчитуваний носій, який містить: код для того, щоб спонукати щонайменше один комп'ютер отримувати інформацію позиціонування для цільового пристрою за допомогою сервера визначення місцеположення за допомогою загального протоколу позиціонування, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, і цільовий пристрій є одним з множини можливих об'єктів, і код для того, щоб спонукати щонайменше один комп'ютер визначати інформацію місцеположення для цільового пристрою за допомогою сервера визначення місцеположення. 19. Спосіб для бездротового зв'язку, який включає: передачу інформації позиціонування для цільового пристрою на сервер визначення місцеположення за допомогою загального протоколу позиціонування, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, цільовий пристрій є одним з множини можливих об'єктів; і прийом інформації місцеположення для цільового пристрою від сервера визначення місцеположення. 20. Спосіб за пунктом 19, в якому передача інформації позиціонування і прийом інформації місцеположення виконуються цільовим пристроєм. 21. Спосіб за пунктом 19, в якому передача інформації позиціонування і прийом інформації місцеположення виконуються блоком позиціонування, зовнішнім відносно цільового пристрою. 22. Спосіб за пунктом 19, який додатково включає вимірювання щонайменше одного сигналу від щонайменше одного джерела опорного сигналу в цільовому пристрої, щоб отримати вимірювання для цільового пристрою, причому згадане щонайменше одне джерело опорного сигналу містить щонайменше один супутник або щонайменше одну базову станцію, або щонайменше один термінал, або їх комбінацію та інформація позиціонування містить вимірювання. 20 UA 100815 C2 5 10 15 20 25 30 35 40 45 50 55 23. Спосіб за пунктом 19, який додатково включає вимірювання сигналу від цільового пристрою в блоці позиціонування, щоб отримати вимірювання для цільового пристрою, причому блок позиціонування є зовнішнім відносно цільового пристрою та інформація позиціонування містить вимірювання. 24. Пристрій для бездротового зв'язку, який містить: засіб для посилання інформації позиціонування для цільового пристрою на сервер визначення місцеположення за допомогою загального протоколу позиціонування, причому сервер визначення місцеположення постійно знаходиться в одному з множини можливих об'єктів і використовує загальний протокол позиціонування незалежно від того, де постійно знаходиться сервер визначення місцеположення, причому цільовий пристрій є одним з множини можливих об'єктів; і засіб для прийому інформації місцеположення для цільового пристрою від сервера визначення місцеположення. 25. Пристрій за пунктом 24, який додатково містить засіб для вимірювання щонайменше одного сигналу від щонайменше одного джерела опорного сигналу в цільовому пристрої, щоб отримати вимірювання для цільового пристрою, причому щонайменше одне джерело опорного сигналу містить щонайменше один супутник або щонайменше одну базову станцію, або щонайменше один термінал, або їх комбінацію та інформація позиціонування містить вимірювання. 26. Пристрій за пунктом 24, який додатково містить: засіб для вимірювання сигналу від цільового пристрою в блоці позиціонування, щоб отримати вимірювання для цільового пристрою, причому блок позиціонування є зовнішнім відносно цільового пристрою та інформація позиціонування містить вимірювання. 27. Спосіб для бездротового зв'язку, який включає: обмін множиною повідомлень позиціонування, що транспортуються разом в одній транзакції повідомлення; і виконання позиціонування на основі множини повідомлень позиціонування. 28. Спосіб за пунктом 27, в якому обмін множиною повідомлень позиціонування включає передачу множини повідомлень позиціонування як пов'язаних повідомлень або в єдиному контейнерному повідомленні. 29. Спосіб за пунктом 27, в якому обмін множиною повідомлень позиціонування включає прийом множини повідомлень позиціонування, відісланих як пов'язані повідомлення або в єдиному контейнерному повідомленні. 30. Спосіб за пунктом 27, в якому множина повідомлень позиціонування відсилається з повідомленням вихідного від мобільного пристрою запиту визначення місцеположення (MO-LR) за допомогою цільового пристрою, щоб ініціювати позиціонування. 31. Спосіб за пунктом 27, в якому множина повідомлень позиціонування відсилається сервером визначення місцеположення і містить перше повідомлення позиціонування, що переносить дані допомоги, і друге повідомлення позиціонування, що запитує інформацію місцеположення. 32. Спосіб за пунктом 27, в якому множина повідомлень позиціонування відсилається на сервер визначення місцеположення і містить перше повідомлення позиціонування, що запитує дані допомоги, і друге повідомлення позиціонування, що переносить вимірювання. 33. Спосіб за пунктом 27, в якому кожне з множини повідомлень позиціонування є одним з множини типів повідомлення, причому множина типів повідомлень містить: тип повідомлення запиту можливостей, тип повідомлення видачі можливостей, тип повідомлення запиту даних допомоги, тип повідомлення видачі даних допомоги, тип повідомлення запиту інформації місцеположення і тип повідомлення видачі інформації місцеположення. 34. Спосіб за пунктом 27, в якому множина повідомлень позиціонування містить повідомлення позиціонування щонайменше двох типів повідомлення. 35. Пристрій для бездротового зв'язку, який містить: засіб для обміну множиною повідомлень позиціонування, що транспортуються разом в одній транзакції повідомлення; і засіб для виконання позиціонування на основі множини повідомлень позиціонування. 36. Пристрій за пунктом 35, в якому засіб для обміну множиною повідомлень позиціонування містить засіб для посилання множини повідомлень позиціонування як пов'язаних повідомлень або в єдиному контейнерному повідомленні. 37. Пристрій за пунктом 35, в якому засіб для обміну множиною повідомлень позиціонування містить засіб для прийому множини повідомлень позиціонування, відісланих як пов'язані повідомлення або в єдиному контейнерному повідомленні. 21 UA 100815 C2 5 10 15 20 25 30 35 40 45 38. Пристрій за пунктом 35, в якому множина повідомлень позиціонування відсилається з повідомленням запиту визначення місцеположення (MO-LR), що виходить від мобільного пристрою, за допомогою цільового пристрою, щоб ініціювати позиціонування. 39. Спосіб для бездротового зв'язку, який включає: обмін повідомленням позиціонування, що містить першу частину і другу частину для конкретного типу транзакції, причому перша частина містить першу інформацію для позиціонування, визначену першою організацією, і друга частина містить другу інформацію для позиціонування, визначену другою організацією; і виконання позиціонування на основі повідомлення позиціонування. 40. Спосіб за пунктом 39, в якому обмін повідомленням позиціонування включає передачу повідомлення позиціонування від цільового пристрою на сервер визначення місцеположення або від сервера визначення місцеположення на цільовий пристрій. 41. Спосіб за пунктом 39, в якому обмін повідомленням позиціонування включає прийом повідомлення позиціонування сервером визначення місцеположення від цільового пристрою або цільовим пристроєм від сервера визначення місцеположення. 42. Спосіб за пунктом 39, в якому перша організація є "Проектом партнерства третього покоління" (3GPP), і в якому друга організація є "Проектом партнерства третього покоління 2" (3GPP2) або відкритим співтовариством виробників мобільного зв'язку (ОМА), або робочою групою інженерів Інтернет (IETF), або інститутом інженерів по електроніці і електротехніки (IEEE), або оператором мережі, або постачальником обладнання. 43. Пристрій для бездротового зв'язку, який містить: засіб для обміну повідомленням позиціонування, що містить першу частину і другу частину для конкретного типу транзакції, причому перша частина містить першу інформацію для позиціонування, визначену першою організацією, і друга частина містить другу інформацію для позиціонування, визначену другою організацією; і засіб для виконання позиціонування на основі повідомлення позиціонування. 44. Пристрій за пунктом 43, в якому засіб для обміну повідомленням позиціонування містить засіб для посилання повідомлення позиціонування від цільового пристрою на сервер визначення місцеположення або від сервера визначення місцеположення на цільовий пристрій. 45. Пристрій за пунктом 43, в якому засіб для обміну повідомленням позиціонування містить засіб для прийому повідомлення позиціонування сервером визначення місцеположення від цільового пристрою або цільовим пристроєм від сервера визначення місцеположення. 46. Спосіб для бездротового зв'язку, який включає: обмін блоком даних вимірювання, застосовним до множини способів позиціонування, причому кожний з множини способів позиціонування асоціюється з різним набором застосовних блоків даних вимірювання; і виконання позиціонування на основі обмінного блока даних вимірювання і відповідно до способу позиціонування, причому спосіб позиціонування є одним з множини способів позиціонування. 47. Спосіб для бездротового зв'язку, який включає: обмін блоком даних допомоги, застосовним до множини способів позиціонування, причому кожний з множини способів позиціонування асоціюється з різним набором застосовних блоків даних допомоги; і виконання позиціонування на основі обмінного блока даних допомоги і відповідно до способу позиціонування, причому спосіб позиціонування є одним з множини способів позиціонування. 22 UA 100815 C2 23 UA 100815 C2 24 UA 100815 C2 25 UA 100815 C2 26 UA 100815 C2 27 UA 100815 C2 28
ДивитисяДодаткова інформація
Назва патенту англійськоюMethods and devices for supporting positioning for terminals in a wireless network
Автори англійськоюEdge, Stephen, W., Tenny, Nathan, E., Fischer, Sven
Назва патенту російськоюСпособ (варианты) и устройство (варианты) для поддержки позиционирования для терминалов в беспроводной сети
Автори російськоюЕдж Стефен В., Тенни Натан Е., Фишер Свен
МПК / Мітки
МПК: G01S 5/00
Мітки: позиціонування, підтримки, мережі, спосіб, бездротовій, варіанти, терміналів, пристрій
Код посилання
<a href="https://ua.patents.su/33-100815-sposib-varianti-i-pristrijj-varianti-dlya-pidtrimki-pozicionuvannya-dlya-terminaliv-v-bezdrotovijj-merezhi.html" target="_blank" rel="follow" title="База патентів України">Спосіб (варіанти) і пристрій (варіанти) для підтримки позиціонування для терміналів в бездротовій мережі</a>
Спосіб та пристрій керування виявленням в одноранговій бездротовій мережі
Номер патенту: 98231
Опубліковано: 25.04.2012
Автори: Хорн Гейвін Бернард, Сампатх Ашвін
МПК: H04L 12/24
Мітки: бездротовій, пристрій, спосіб, виявленням, керування, мережі, одноранговий
Формула / Реферат:
1. Пристрій бездротового зв'язку, який містить:систему обробки, виконану з можливістю підтримки широкомовної передачі множини сигналів виявлення, розділених у часі періодами мовчання, причому система обробки додатково виконана з можливістю зміни тривалості щонайменше одного з періодів мовчання залежно щонайменше від одного з поточного режиму роботи або оточення, причому система обробки додатково виконана з можливістю входу в режим...
Спосіб позиціонування абонентів в мережі gsm
Номер патенту: 52369
Опубліковано: 25.08.2010
Автори: Зеленін Анатолій Миколайович, Дереєв Олександр В'ячеславович, Бибка Олександр Іванович
МПК: H04B 7/02
Мітки: позиціонування, абонентів, мережі, спосіб
Формула / Реферат:
Спосіб позиціонування абонентів в мережі GSM, що включає радіолокаційну технологію вимірювань часу проходження радіосигналу від мобільної станції до найближчих трьох базових станцій, після чого розраховують відстань до відповідних базових станцій і радіусами, відповідними до розрахованих відстаней, проводять кола з центрами, які співпадають з базовими станціями, причому точка перетину цих кіл характеризує місцезнаходження абонента (мобільної...
Пристрій для підтримки зв’язку у мережі зв’язку навігаційної системи, елемент такої мережі, спосіб для формування даних, що стосуються щонайменше одної навігаційної системи, носій інформації та сервер для здійс
Номер патенту: 94445
Опубліковано: 10.05.2011
Автори: Вірола Лаурі, Сюрйарінн Ярі, Аланен Кіммо
Мітки: такої, стосуються, носій, системі, інформації, пристрій, зв'язку, здійс, спосіб, одної, елемент, сервер, формування, щонайменше, підтримки, мережі, даних, навігаційної
Формула / Реферат:
1. Пристрій (R) для підтримки зв'язку у мережі зв'язку навігаційної системи, який має елемент R.1.1 перевірки, призначений для аналізу прийнятих допоміжних даних,який відрізняється тим, що також включаєелемент (R.1.2) визначення, виконаний з можливістю визначати режим допоміжних даних у зазначених допоміжних даних, причому ці допоміжні дані адаптовані для використання пристроєм для здійснення позиціонування пристрою...
Спосіб та пристрій для зменшення забруднення контрольними сигналами в бездротовій мережі
Номер патенту: 100139
Опубліковано: 26.11.2012
Автори: Агравал Авніш, Горохов Алєксєй, Цзи Тінфан
МПК: H04W 40/00
Мітки: зменшення, сигналами, контрольними, мережі, пристрій, бездротовій, спосіб, забруднення
Формула / Реферат:
1. Спосіб бездротового зв'язку, який містить етапи, на яких:відправляють загальний контрольний сигнал з першою щільністю і першим рівнем потужності передачі протягом першого періоду часу;відправляють загальний контрольний сигнал з другою щільністю і другим рівнем потужності передачі протягом другого періоду часу, причому друга щільність є меншою, ніж перша щільність, або другий рівень потужності передачі є меншим, ніж перший...
Спосіб та пристрій (варіанти), призначені для визначення місцеположення безпровідної локальної мережі в глобальній мережі
Номер патенту: 97347
Опубліковано: 10.02.2012
Автори: Джаін Нікхіл, Нанда Санджив, Годжик Алєксандар, Дешпанде Манодж М.
МПК: H04W 48/00
Мітки: пристрій, глобальній, визначення, призначені, місцеположення, локальної, безпровідної, мережі, спосіб, варіанти
Формула / Реферат:
1. Безпровідний пристрій зв'язку, що міститьпам'ять, сконфігуровану з можливістю запам'ятовування інформації ідентифікаційної мітки, що належить до першої мережі зв'язку, причому інформація ідентифікаційної мітки включає у себе інформацію, що ідентифікує місцеположення, для безпровідного пристрою зв'язку в першій мережі зв'язку і інформацію, що ідентифікує місцеположення, для безпровідного пристрою зв'язку відносно однієї або...
Попередній патент: Спосіб генерації теплової енергії (варіанти) і tеплогенеруючий струминний апарат (варіанти)
Наступний патент: Спосіб визначення відсоткового вмісту води в суміші діелектрик-вода при зміні вмісту води в суміші в широких межах
Випадковий патент: Пристрій для контролю температури розплавів полімерних матеріалів в екструдері