Затримана сигналізація радіоресурсів в мобільній радіомережі
Номер патенту: 97857
Опубліковано: 26.03.2012
Автори: Роуланд Томас К., Делоч мол., Джеймс Дуглас, Барроз Кірк Аллан
Формула / Реферат
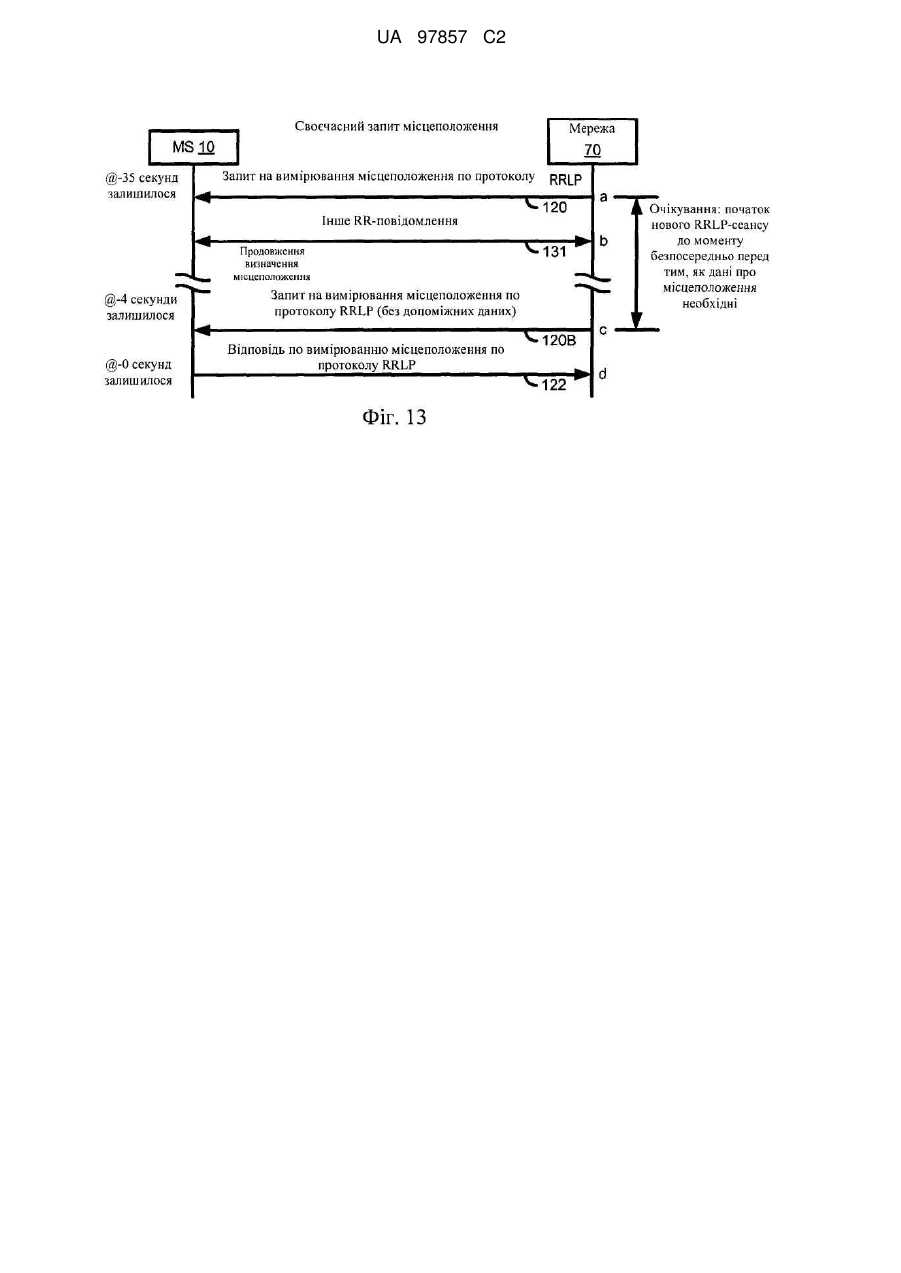
1. Спосіб зменшення числа повторних повідомлень запиту на визначення місцеположення між мережею і мобільною станцією в бездротовій мережі, спосіб містить:
- очікування до попередньо визначеного часу, причому попередньо визначений час оснований на часі, коли дані про місцеположення необхідно використовувати;
- передачу, в попередньо визначений час, повідомлення запиту на визначення місцеположення, що містить час відгуку мережі і точність мережі; і
- прийом, у час до того, як дані про місцеположення необхідно використовувати, повідомлення відповіді по визначенню місцеположення, що містить дані про місцеположення.
2. Спосіб за п. 1, в якому час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд.
3. Спосіб за п. 1, в якому точність мережі містить значення, що представляє низьку точність не менше 100 метрів.
4. Спосіб за п. 1, в якому запит на визначення місцеположення не містить допоміжних даних.
5. Спосіб за п. 1, який додатково включає:
- передачу повідомлення допоміжних даних; і
- прийом повідомлення підтвердження прийому допоміжних даних.
6. Спосіб за п. 1, в якому повідомлення запиту на визначення місцеположення містить повідомлення запиту на визначення місцеположення по протоколу визначення місцеположення.
7. Спосіб за п. 1, в якому повідомлення відповіді по визначенню місцеположення містить повідомлення відповіді по визначенню місцеположення по протоколу визначення місцеположення.
8. Спосіб зменшення числа повторних повідомлень запиту на визначення місцеположення між мережею і мобільною станцією в бездротовій мережі, спосіб включає етапи, на яких:
- передають повідомлення допоміжних даних протоколу визначення місцеположення;
- приймають повідомлення підтвердження прийому допоміжних даних протоколу визначення місцеположення;
- очікують до попередньо визначеного часу, причому попередньо визначений час оснований на часі, коли необхідно використовувати дані про місцеположення;
- передають, в попередньо визначений час, повідомлення запиту на визначення місцеположення по протоколу визначення місцеположення, що містить час відгуку мережі і точність мережі, причому час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд, причому точність мережі містить значення, що представляє низьку точність не менше 100 метрів, і причому повідомлення запиту на визначення місцеположення по протоколу визначення місцеположення не містить допоміжних даних; і
- приймають, у час до того, як дані місцеположення необхідно використовувати, повідомлення відповіді по визначенню місцеположення по протоколу визначення місцеположення, що містить дані про місцеположення.
9. Мережа для зменшення числа повторних повідомлень запиту на визначення місцеположення між мережею і мобільною станцією в бездротовій мережі, мережа містить:
- таймер, щоб очікувати до попередньо визначеного часу, причому попередньо визначений час оснований на часі, коли необхідно використовувати дані про місцеположення;
- передавальний пристрій, щоб передавати, в попередньо визначений час, повідомлення запиту на визначення місцеположення, що містить час відгуку мережі і точність мережі; і
- приймальний пристрій, щоб приймати, у час до того, як дані про місцеположення необхідно використовувати, повідомлення відповіді по визначенню місцеположення, що містить дані про місцеположення.
10. Мережа за п. 9, в якій час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд.
11. Мережа за п. 9, в якій точність мережі містить значення, що представляє низьку точність не менше 100 метрів.
12. Мережа за п. 9, в якій запит на визначення місцеположення не містить допоміжних даних.
13. Мережа за п. 9, в якій повідомлення запиту на визначення місцеположення містить повідомлення запиту на визначення місцеположення по протоколу визначення місцеположення.
14. Мережа за п. 9, в якій повідомлення відповіді по визначенню місцеположення містить повідомлення відповіді по визначенню місцеположення по протоколу визначення місцеположення.
15. Машиночитаний продукт, який містить машиночитаний носій, що містить:
- код, щоб примусити щонайменше один комп'ютер чекати до попередньо визначеного часу, причому попередньо визначений час оснований на часі, коли необхідно використовувати дані про місцеположення;
- код, щоб примусити щонайменше один комп'ютер передавати, в попередньо визначений час, повідомлення запиту на визначення місцеположення, що містить час відгуку мережі і точність мережі; і
- код, щоб примусити щонайменше один комп'ютер приймати, у час до того, як дані про місцеположення необхідно використовувати, повідомлення відповіді по визначенню місцеположення, що містить дані про місцеположення.
16. Машиночитаний продукт за п. 15, в якому час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд.
17. Машиночитаний продукт за п. 15, в якому точність мережі містить значення, що представляє низьку точність не менше 100 метрів.
18. Машиночитаний продукт за п. 15, в якому запит на визначення місцеположення не містить допоміжних даних.
19. Машиночитаний продукт за п. 15, в якому машиночитаний носій додатково містить:
- код, щоб примусити щонайменше один комп'ютер передавати повідомлення допоміжних даних; і
- код, щоб примусити щонайменше один комп'ютер приймати повідомлення підтвердження прийому допоміжних даних.
20. Машиночитаний продукт за п. 15, в якому повідомлення запиту на визначення місцеположення містить повідомлення запиту на визначення місцеположення по протоколу визначення місцеположення.
21. Машиночитаний продукт за п. 15, в якому повідомлення відповіді по визначенню місцеположення містить повідомлення відповіді по визначенню місцеположення по протоколу визначення місцеположення.
Текст
Реферат: Реалізація системи, пристрою і способу для повідомлення даних про місцеположення мобільної станції, поліпшення даних про місцеположення, оптимального повідомлення допоміжних даних і/або зменшення числа повторних повідомлень запиту на вимірювання місцеположення в бездротовій мережі. UA 97857 C2 (12) UA 97857 C2 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 Перехресне посилання на споріднені заявки Дана заявка згідно з 35 U.S.С §119 (e) вимагає пріоритет попередньої заявки на патент (США) 60/971453, озаглавленої "GSM Control Plane Positioning Preemption RRLP Implementation for MS and SMLC", поданої 11 вересня 2007 року (адвокатська виписка 072346Р1); і попередньої заявки на патент (США) 61/012039, озаглавленої "GSM Control Plane Positioning Preemption RRLP Implementation for MS and SMLC", поданої 6 грудня 2007 року (номер в реєстрі повіреного 072346Р2), розкриття суті яких в явній формі повністю містяться по посиланню в даному документі. Галузь техніки, до якої належить винахід Даний винахід, в цілому, належить до систем зв'язку, а більш конкретно, до поліпшення визначення місцеположення за допомогою глобальної навігаційної супутникової системи. Рівень техніки Часто бажано і іноді необхідно знати місцеположення мобільної станції (наприклад, стільникового телефону). Терміни "місцеположення" і "положення" синонімічні і використовуються взаємозамінно в даному документі. Наприклад, користувач може використовувати мобільну станцію (MS) для того, щоб переглядати веб-вузол, і може вибирати чутливий до місцеположення вміст. Місцеположення мобільної станції потім може бути визначене і використане для того, щоб надавати відповідний вміст користувачеві. Є багато інших сценаріїв, в яких знання місцеположення мобільної станції корисне або необхідне. Наприклад, розпорядження 911 FCC вимагає, щоб оператори зв'язку надавали вдосконалені послуги 911, в тому числі визначення географічного місцеположення мобільної станції, що виконує виклик служб екстреної допомоги 911. Мобільна станція може ініціалізувати так, що вона може отримувати послуги визначення місцеположення з власної мережі також в ході роумінгу в гостьовій мережі. Мобільна станція може здійснювати зв'язок з різними мережевими об'єктами у власній мережі, щоб визначати місцеположення мобільної станції кожний раз, коли необхідно. Передбачена множина різних типів технологій, які використовуються при обчисленні місцеположення мобільних станцій в бездротових мережах з різними рівнями успіху і точності. Способи на основі мережі включають в себе кут приходу (АОА) з використанням щонайменше двох веж, різниця часів приходу сигналів (TDOA) з використанням мультилатерації і підпис місцеположення з використанням зняття "RF-відбитків пальців" для зіставлення з RF шаблонами, які мобільні станції демонструють у відомих місцеположеннях. Різні способи на основі мобільної станції включають GPS, вдосконалену трилатерацію по прямій лінії зв'язку (AFLT), звіт по часовому випередженню/вимірюванню в мережі (TA/NMR) і/або вдосконалену відстежувану різницю часів (E-OTD). Інший спосіб на основі мобільної станції полягає в технології з використанням GPS (A-GPS), в якій сервер надає допоміжні дані в мобільну станцію, щоб вона мала малий час до першого місцевизначення (TTFF), щоб дозволити збір слабкого сигналу і оптимізувати використання живлення акумулятора мобільної станції. A-GPS використовується як технологія визначення місцеположення ізольовано або спільно з іншими технологіями визначення місцеположення, які надають вимірювання дальності. A-GPS-сервер надає в бездротову мобільну станцію дані, які є характерними для приблизного місцеположення мобільної станції. Допоміжні дані допомагають мобільній станції швидко захоплювати супутники і потенційно надають можливість телефонному апарату захоплювати слабкі сигнали. Мобільна станція потім виконує обчислення місцеположення або необов'язково повертає виміряні зсуви коду на сервер, щоб виконувати обчислення. A-GPS може застосовувати додаткову інформацію, таку як вимірювання часу повного прийому, від стільникової базової станції в мобільну станцію, щоб обчислити місцеположення, де в іншому випадку це може бути неможливим, наприклад, коли видимими є недостатнє число GPS-супутників. Прогрес в технологіях супутникової глобальної системи визначення місцеположення (GPS), часового випередження (ТА) і наземного визначення місцеположення на основі вдосконаленої відстежуваної різниці у часі (E-OTD) надає точне визначення географічного місцеположення (наприклад, широти і довготи) абонента мобільної станції. Оскільки послуги визначення географічного місцеположення розгортаються в мережах бездротового зв'язку, така інформація місцеположення може бути збережена в мережевих елементах і доставлена у вузли мережі за допомогою повідомлень сигналізування. Така інформація може зберігатися в обслуговуючому центрі визначення місцеположення мобільного термінала (SMLC), автономному SMLC (SAS), об'єкті визначення місцеположення (PDE), захищеній платформі визначення місцеположення в користувацькій площині (SLP) і спеціальних базах даних місцеположення мобільних абонентів. 1 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 Одним прикладом спеціалізованої бази даних місцеположення мобільних абонентів є SMLC, що пропонується за допомогою партнерського проекту третього покоління (3GPP). Зокрема, 3GPP точно визначив протокол сигналізації для повідомлення місцеположення мобільних абонентів в і з SMLC. Цей протокол сигналізації згадується в даному документі як протокол LCS (послуг визначення місцеположення) на основі радіоресурсів, позначений як RRLP, і точно визначає сигналізацію, що повідомляється між мобільною станцією і SMLC, які належать до місцеположення мобільного абонента. Докладний опис протоколу RRLP див. в 3GPP TS 44.031 v7.2.0 (2008-11) 3rd Generation Partnership Project; Technical Specification Group GSM Edge Radio Access Network; Location Services (LCS); Mobile Station (MS) Serving Mobile Location Center (SMLC) Radio Resource LCS Protocol (RRLP) (редакція 7). У доповнення до глобальної системи визначення місцеположення (GPS) Сполучених Штатів, інші супутникові системи визначення місцеположення (SPS), такі як російська система GLONASS або запропонована європейська система Galileo, також можуть використовуватися для визначення місцеположення мобільної станції. Проте, кожна з цих систем працює згідно з різними специфікаціями. Одним недоліком супутникової системи визначення місцеположення є час, який витрачається на те, щоб виявляти точне місцеположення. Як правило, точність місцеположення ув'язується з швидкістю виявлення і навпаки. Таким чином, більш точне визначення місцеположення займає більше часу. Відповідно, є потреба в системі зв'язку, що містить в собі глобальну навігаційну супутникову систему (GNSS), яка може визначати місцеположення для мобільної станції на основі супутникових сигналів, що відправляються від двох або більше супутників, щоб надавати додаткову ефективність і переваги для визначення місцеположення, в тому числі підвищену точність. Існує потреба в тому, щоб підвищувати точність при одночасній відсутності негативного впливу на швидкість виявлення або загальний час виявлення при виявленні місцеположення мобільної станції, наприклад, під час виклику служб екстреної допомоги (ES) або сеансу послуг доданого значення (VAS). Суть винаходу Деякі варіанти здійснення даного винаходу передбачають спосіб зменшення числа повторних повідомлень запиту на вимірювання місцеположення між мережею і мобільною станцією в бездротовій мережі, при цьому спосіб містить: передачу повідомлення допоміжних даних RRLP; прийом повідомлення підтвердження прийому допоміжних даних RRLP; очікування до попередньо визначеного часу, при цьому попередньо визначений час оснований на часі, коли необхідні дані про місцеположення; передачу, в попередньо визначений час, повідомлення запиту на вимірювання місцеположення по протоколу RRLP, що містить час відгуку мережі і точність мережі, при цьому час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд, при цьому точність мережі містить значення, що представляє низьку точність не менше 100 метрів, і при цьому повідомлення запиту на вимірювання місцеположення по протоколу RRLP не містить допоміжних даних; і прийом, у час до того, як дані місцеположення потрібні, повідомлення відповіді по вимірюванню місцеположення по протоколу RRLP, що містить дані про місцеположення. Деякі варіанти здійснення даного винаходу передбачають мережу для зменшення числа повторних повідомлень запиту на вимірювання місцеположення між мережею і мобільною станцією в бездротовій мережі, при цьому спосіб містить: таймер, щоб чекати до попередньо визначеного часу, при цьому попередньо визначений час оснований на часі, коли необхідні дані про місцеположення; передавальний пристрій, щоб передавати, в попередньо визначений час, повідомлення запиту на вимірювання місцеположення, що містить час відгуку мережі і точність мережі; і приймальний пристрій, щоб приймати, у час до того, як дані про місцеположення необхідні, повідомлення відповіді по вимірюванню місцеположення, що містить дані про місцеположення. Мережа, в якій час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд. Мережа, в якій точність мережі містить значення, що представляє низьку точність не менше 100 метрів. Мережа, в якій запит на вимірювання місцеположення не містить допоміжних даних. Мережа, в якій повідомлення запиту на вимірювання місцеположення містить повідомлення запиту на вимірювання місцеположення по протоколу RRLP. Мережа, в якій повідомлення відповіді по вимірюванню місцеположення містить повідомлення відповіді по вимірюванню місцеположення по протоколу RRLP. Деякі варіанти здійснення даного винаходу передбачають машиночитаний продукт, який містить машиночитаний носій, що містить: код, щоб примусити щонайменше один комп'ютер чекати до попередньо визначеного часу, при цьому попередньо визначений час оснований на часі, коли необхідні дані про місцеположення; код, щоб примусити щонайменше один комп'ютер передавати, в попередньо визначений час, повідомлення запиту на вимірювання 2 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 місцеположення, що містить час відгуку мережі і точність мережі; і код, щоб примусити щонайменше один комп'ютер приймати, у час до того, як дані про місцеположення необхідні, повідомлення відповіді по вимірюванню місцеположення, що містить дані про місцеположення. Машиночитаний продукт, в якому час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд. Машиночитаний продукт, в якому точність мережі містить значення, що представляє низьку точність не менше 100 метрів. Машиночитаний продукт, в якому запит на вимірювання місцеположення не містить допоміжних даних. Машиночитаний продукт, в якому машиночитаний носій, додатково містить: код, щоб примусити щонайменше один комп'ютер передавати повідомлення допоміжних даних; і код, щоб примусити щонайменше один комп'ютер приймати повідомлення підтвердження прийому допоміжних даних. Машиночитаний продукт, в якому повідомлення запиту на вимірювання місцеположення містить повідомлення запиту на вимірювання місцеположення по протоколу RRLP. Машиночитаний продукт, в якому повідомлення відповіді по вимірюванню місцеположення містить повідомлення відповіді по вимірюванню місцеположення по протоколу RRLP. Деякі варіанти здійснення даного винаходу передбачають спосіб в мережі для мінімізації повторних запитів між мережею і мобільною станцією в бездротовій мережі, при цьому спосіб містить: відправку повідомлення запиту, тим самим відкриваючи сеанс в мобільній станції; визначення, в той час коли сеанс є відкритим, того, що RR-повідомлення готове до відправки в мобільну станцію; ухиляння від припинення сеансу з RR-повідомленням; і прийом повідомлення відповіді, тим самим закриваючи сеанс. Спосіб, в якому етап ухиляння від припинення сеансу містить: очікування, щоб відправити RR-повідомлення; і відправку RR-повідомлення після того, як сеанс закритий. Спосіб, в якому етап ухиляння від припинення сеансу містить відкидання RRповідомлення. Спосіб, в якому повідомлення запиту містить повідомлення запиту на вимірювання місцеположення по протоколу RRLP. Спосіб, в якому повідомлення запиту містить повідомлення допоміжних даних RRLP. Деякі варіанти здійснення даного винаходу передбачають мережу для мінімізації повторних запитів між мережею і мобільною станцією в бездротовій мережі, при цьому мережа містить: засіб для відправки повідомлення запиту, тим самим відкриваючи сеанс в мобільній станції; засіб для визначення, в той час коли сеанс є відкритим, того, що RR-повідомлення готове до відправки в мобільну станцію; засіб для ухиляння від припинення сеансу з RR-повідомленням; і засіб для прийому повідомлення відповіді, тим самим закриваючи сеанс. Спосіб, в якому засіб для ухиляння від припинення сеансу містить: засіб для очікування, щоб відправити RRповідомлення; і засіб для відправки RR-повідомлення після того, як сеанс закритий. Спосіб, в якому засіб для ухиляння від припинення сеансу містить відкидання RR-повідомлення. Спосіб, в якому повідомлення запиту містить повідомлення запиту на вимірювання місцеположення по протоколу RRLP. Спосіб, в якому повідомлення запиту містить повідомлення допоміжних даних RRLP. Деякі варіанти здійснення даного винаходу передбачають мережу для мінімізації повторних запитів між мережею і мобільною станцією в бездротовій мережі, при цьому мережа містить: передавальний пристрій, щоб відправляти повідомлення запиту, тим самим відкриваючи сеанс в мобільній станції; логічний блок, щоб визначати, в той час коли сеанс є відкритим, то, що RRповідомлення готове до відправки в мобільну станцію; логічний блок, щоб ухилятися від припинення сеансу з RR-повідомленням; і приймальний пристрій, щоб приймати повідомлення відповіді, тим самим закриваючи сеанс. Мережа, в якій логічний блок, щоб ухилятися від припинення сеансу, містить: таймер, щоб чекати, щоб відправити RR-повідомлення; при цьому передавальний пристрій додатково повинен відправляти RR-повідомлення після того, як сеанс закритий. Мережа, в якій логічний блок, щоб ухилятися від припинення сеансу, містить логічний блок, щоб відкидати RR-повідомлення. Спосіб, в якому повідомлення запиту містить повідомлення запиту на вимірювання місцеположення по протоколу RRLP. Спосіб, в якому повідомлення запиту містить повідомлення допоміжних даних RRLP. Деякі варіанти здійснення даного винаходу передбачають машиночитаний продукт, який містить машиночитаний носій, що містить: код, щоб примусити щонайменше один комп'ютер відправляти повідомлення запиту, тим самим відкриваючи сеанс в мобільній станції; код, щоб примусити щонайменше один комп'ютер визначати, в той час коли сеанс є відкритим, то, що RR-повідомлення готове до відправки в мобільну станцію; код, щоб примусити щонайменше один комп'ютер ухилятися від припинення сеансу через RR-повідомлення; і код, щоб примусити щонайменше один комп'ютер приймати повідомлення відповіді, тим самим закриваючи сеанс. Спосіб, в якому код, щоб примусити щонайменше один комп'ютер ухилятися від припинення сеансу містить: код, щоб примусити щонайменше один комп'ютер чекати, щоб відправити RR 3 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 повідомлення; і код, щоб примусити щонайменше один комп'ютер відправляти RRповідомлення після того, як сеанс закритий. Спосіб, в якому код, щоб примусити щонайменше один комп'ютер ухилятися від припинення сеансу містить код, щоб примусити щонайменше один комп'ютер відкидати RR-повідомлення. Спосіб, в якому повідомлення запиту містить повідомлення запиту на вимірювання місцеположення по протоколу RRLP. Спосіб, в якому повідомлення запиту містить повідомлення допоміжних даних RRLP. Ці і інші аспекти, ознаки і переваги винаходу повинні стати очевидними при зверненні до варіантів здійснення, описаних нижче. Короткий опис креслень Варіанти здійснення винаходу описані далі тільки як приклад з посиланням на креслення. Фіг. 1А, 1B і 1С показують різні компоненти і інтерфейси в бездротовій мережі. Фіг. 2 показує блок-схему послідовності повідомлень типового процесу визначення місцеположення з використанням RRLP-сеансів. Фіг. 3 показує псевдосегментацію допоміжних даних. Фіг. 4 і 5 ілюструють зупинку визначення місцеположення на основі MS, що приймає додаткове RR-повідомлення. Фіг. 6 і 7 показують події, які запускають і вимикають GPS-механізм, відповідно до варіантів здійснення даного винаходу. Фіг. 8 показує блок-схему послідовності повідомлень, що ілюструє раннє визначення місцеположення, відповідно до варіантів здійснення даного винаходу. Фіг. 9 і 10 ілюструють спосіб продовження визначення місцеположення після того, як додаткове RR-повідомлення прийняте, відповідно до варіантів здійснення даного винаходу. Фіг. 11 і 12 ілюструють спосіб оптимального упорядкування завантажених допоміжних даних, відповідно до варіантів здійснення даного винаходу. Фіг. 13 і 14 показують спосіб відправки своєчасних запитів місцеположення, відповідно до варіантів здійснення даного винаходу. Фіг. 15 і 16 показують спосіб затримки (або відкидання) нових RR-повідомлень, щоб ухилятися від припинених сеансів, відповідно до варіантів здійснення даного винаходу. Фіг. 17, 18, 19, 20 і 21 ілюструють спосіб зміни параметра точності, щоб балансувати час відгуку і точність при виклику служб екстреної допомоги (ES), відповідно до варіантів здійснення даного винаходу. Фіг. 22 показує блок-схему послідовності повідомлень для власної додаткової послуги (VAS), відповідно до варіантів здійснення даного винаходу. Докладний опис винаходу У подальшому описі, виконується посилання на прикладені креслення, які ілюструють декілька варіантів здійснення даного винаходу. Потрібно розуміти, що інші варіанти здійснення можуть бути використані, і механічні, композиційні, структурні, електричні і функціональні зміни можуть бути здійснені без відступу від суті і об'єму даного розкриття. Нижченаведений докладний опис не повинен розглядатися в обмежуючому значенні. Крім того, деякі частини нижчеприведеного докладного опису представляються з точки зору процедур, етапів, логічних блоків, обробки і інших символьних представлень операцій з інформаційними бітами, які можуть виконуватися в електронних схемах або в комп'ютерному запам'ятовуючому пристрої. Процедура, машиновиконуваний етап, логічний блок, процес і т. д. передбачаються тут як самоузгоджена послідовність етапів або інструкцій, що приводить до бажаного результату. Етапи - це те, що використовує фізичну обробку фізичних величин. Ці величини можуть приймати форму електричних, магнітних або радіосигналів, що допускають збереження, перенесення, комбінування, порівняння і іншу обробку в електронних схемах або в комп'ютерній системі. Ці сигнали по контексту можуть згадуватися як біти, значення, елементи, символи, знаки, терміни, числа і т. п. Кожний етап може виконуватися за допомогою апаратних засобів, програмного забезпечення, мікропрограмного забезпечення або комбінацій вищезазначеного. При реалізації в апаратних засобах блоки обробки можуть бути реалізовані в одній або декількох спеціалізованих інтегральних схемах (ASIC), процесорах цифрових сигналів (DSP), пристроях обробки цифрових сигналів (DSPD), програмованих логічних пристроях (PLD), програмованих користувачем вентильних матрицях (FPGA), процесорах, контролерах, мікроконтролерах, мікропроцесорах, інших електронних пристроях, призначених для того, щоб виконувати описані в даному документі функції, і/або в комбінаціях вищезазначеного. По всьому даному докладному опису можуть виконуватися посилання на "один приклад", "одну ознаку", "приклад" або "ознаку", і вони означають, що конкретна ознака, структура або характеристика, описана в зв'язку з ознакою і/або прикладом, включена щонайменше в одну ознаку і/або приклад заявленого предмета винаходу. Таким чином, появи фрази "в одному 4 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 прикладі", "приклад", "в одній ознаці" або "ознака" в різних місцях по всьому даному докладному опису не обов'язково всі посилаються на одну і ту ж ознаку і/або приклад. Крім того, конкретні ознаки, структури або характеристики можуть бути комбіновані в одному або більше прикладах і/або ознаках. "Інструкції", які згадуються в даному документі, належать до виразів, які представляють одну або більше логічних операцій. Наприклад, інструкції можуть бути "машиночитаними" за допомогою інтерпретації за допомогою машини для виконання однієї або більше операції для одного або більше об'єктів даних. Проте, це просто приклад інструкцій, і заявлений предмет винаходу не обмежений в цьому відношенні. У іншому прикладі інструкції, які згадуються в даному документі, можуть належати до кодованих команд, які є такими, що виконуються за допомогою схеми обробки, що має набір команд, який містить в собі кодовані команди. Така інструкція може бути кодована в формі машинної мови, зрозумілої для схеми обробки. До того ж, це просто приклади інструкцій, і заявлений предмет винаходу не обмежений в цьому відношенні. "Носій зберігання даних", який згадується в даному документі, належить до фізичних носіїв, що допускають зберігання виразів, які сприймаються за допомогою однієї або більше машин. Наприклад, носій зберігання даних може містити один або більше пристроїв зберігання для зберігання машиночитаних інструкцій і/або інформації. Ці пристрої зберігання можуть містити будь-який з декількох типів носіїв, що включають в себе, наприклад, магнітні, оптичні або напівпровідникові носії зберігання даних. Ці запам'ятовуючі пристрої також можуть містити будьякий тип довготривалих, короткочасних, енергозалежних або енергонезалежних запам'ятовуючих пристроїв. Проте, це просто приклади носіїв зберігання даних, і заявлений предмет винаходу не обмежений в цьому відношенні. Термін "носій зберігання даних" не застосовний до вакууму. Якщо прямо не вказане інше, як очевидно з нижченаведеного пояснення, потрібно брати до уваги, що в даному докладному описі пояснення, які використовують такі терміни, як "обробка", "обчислення", "розрахунок", "вибір", "формування", "надання", "заборона", "визначення місцеположення", "завершення", "ідентифікація", "ініціалізація", "виявлення", "отримання", "надання як хост", "зберігання", "представлення", "оцінка", "прийом", "передача", "визначення" і/або т. п., згадуються як дії і/або процеси, які можуть бути виконані за допомогою обчислювальної платформи, такої як комп'ютер або аналогічний електронний обчислювальний пристрій, який обробляє і/або перетворює дані, представлені як фізичні електронні і/або магнітні величини і/або інші фізичні величини, в процесорах, запам'ятовуючих пристроях, регістрах і/або інших пристроях зберігання інформації,передачі, прийому і/або відображення обчислювальної платформи. Ці дії і/або процеси можуть бути виконані за допомогою обчислювальної платформи під керуванням машиночитаних інструкцій, збережених, наприклад, в носії зберігання даних. Ці машиночитані інструкції можуть містити, наприклад, програмне забезпечення або мікропрограмне забезпечення, збережене в носії зберігання даних, включеному як частина обчислювальної платформи (наприклад, включеному як частина схеми обробки або зовнішньому до такої схеми обробки). Додатково, якщо явно не вказане інше, процеси, описані в даному документі відносно блок-схем послідовності операцій або інших елементів, також можуть виконуватися і/або керуватися, повністю або частково, за допомогою цієї обчислювальної платформи. Технології бездротового зв'язку, описані в даному документі, можуть використовуватися в зв'язку з різними мережами бездротового зв'язку, такими як бездротова глобальна обчислювальна мережа (WWAN), бездротова локальна обчислювальна мережа (WLAN), бездротова персональна обчислювальна мережа (WPAN) і т. д. Терміни "мережа" і "система" можуть бути використані взаємозамінно в даному документі. WWAN може бути мережею з множинним доступом з кодовим розділенням каналів (CDMA), мережею з множинним доступом з часовим розділенням каналів (TDMA), мережею з множинним доступом з частотним розділенням каналів (FDMA), мережею з ортогональним множинним доступом з частотним розділенням каналів (OFDMA), мережею з множинним доступом з частотним розділенням каналів на одній несучій (SC-FDMA) мережу і т. д. CDMA-мережа може реалізовувати одну або більше технологій радіозв'язку, наприклад, cdma2000, широкосмуговий CDMA (W-CDMA) і т. д., крім інших технологій радіозв'язку. Тут cdma2000 може містити в собі технології, реалізовані згідно зі стандартами IS-95, IS-2000 і IS-856. TDMA-мережа може реалізовувати глобальну систему мобільного зв'язку (GSM), цифрову вдосконалену систему мобільного телефонного зв'язку (D-AMPS) або яку-небудь іншу RAT. GSM і W-CDMA описуються в документах від консорціуму з назвою партнерський проект третього покоління (3GPP). CDMA2000 описується в документах від консорціуму з назвою партнерський проект третього покоління 2 (3GPP2). Документи 3GPP і 3GPP2 є загальнодоступними. WLAN, 5 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 наприклад, може містити мережі IEEE 802.11х, a WPAN може містити Bluetooth-мережу, IEEE 802.15х. Реалізації бездротового зв'язку, описані в даному документі, також можуть використовуватися в зв'язку з будь-якою комбінацією WWAN, WLAN і/або WPAN. Пристрій і/або система можуть оцінювати місцеположення пристрою щонайменше частково на основі сигналів, що приймаються від супутників. Зокрема такий пристрій і/або система можуть отримувати вимірювання "псевдодальності", що містять наближення відстаней між асоційованими супутниками і навігаційним супутниковим приймальним пристроєм. У конкретному прикладі, така псевдодальність може бути визначена в приймальному пристрої, який допускає обробку сигналів з одного або більше супутників як частину супутникової системи визначення місцеположення (SPS). Ця SPS може містити, наприклад, систему глобального позиціонування (GPS), Galileo, Glonass, крім іншого, або будь-яку SPS, розроблену в майбутньому. Щоб визначати своє місцеположення, супутниковий навігаційний приймальний пристрій може отримувати вимірювання псевдодальності до трьох або більше супутників, а також свої місцеположення під час передачі. Знаючи орбітальні параметри супутників, ці місцеположення можуть бути обчислені для будь-якого моменту часу. Вимірювання псевдодальності потім може бути визначене щонайменше частково на основі часу, протягом якого сигнал проходить з супутника в приймальний пристрій, помноженого на швидкість світла. Хоч технології, описані в даному документі, можуть бути надані як реалізації визначення місцеположення в GPS типах Galileo для SPS і/або як конкретні ілюстрації, потрібно розуміти, що ці технології також можуть застосовуватися до інших типів SPS, і що заявлений предмет винаходу не обмежений в цьому відношенні. Технології, описані в даному документі, можуть використовуватися з будь-якою з декількох SPS, в тому числі, наприклад, вищезазначеною SPS. Крім того, такі технології можуть використовуватися в системах визначення місцеположення, які використовують псевдосупутники або комбінацію супутників і псевдосупутників. Псевдосупутники можуть містити наземні передавальні пристрої, які передають в широкомовному режимі код псевдовипадкового шуму (PRN) або інший код вимірювання дальності (наприклад, подібний до стільникового сигналу GPS або CDMA), модульований на несучому сигналі L-смуги (або іншої частоти), який може бути синхронізований з GPS-часом. Такому передавальному пристрою може бути призначений унікальний PRN-код, щоб дозволяти ідентифікацію за допомогою віддаленого приймального пристрою. Псевдосупутники використовуються у випадках, коли SPS-сигнали з орбітального супутника можуть бути недоступні, наприклад, в тунелях, шахтах, будівлях, міських каньйонах або інших закритих ділянках. Інша реалізація псевдосупутників відома як радіомаяки. Термін "супутник", при використанні в даному документі, має намір містити в собі псевдосупутники, еквіваленти псевдосупутників і можливо інші елементи. Термін "сигнали SPS", при використанні в даному документі, має намір містити в собі SPS-подібні сигнали від псевдосупутників або еквівалентів псевдосупутників. При використанні в даному документі, кишеньковий мобільний пристрій або мобільна станція (MS) означають пристрій, який може час від часу змінювати положення або місцеположення. Зміни положення і/або місцеположення можуть містити зміни напрямку, відстані, орієнтації і т. д., як деякі приклади. У конкретних прикладах, мобільна станція може містити стільниковий телефон, пристрій бездротового зв'язку, абонентський пристрій, портативний комп'ютер, інший пристрій по стандарту персональної системи зв'язку (PCS) і/або інший портативний пристрій зв'язку. Мобільна станція також може містити процесор і/або обчислювальну платформу, виконану з можливістю здійснювати функції, керовані за допомогою машиночитаних інструкцій. Дана заявка належить до наступних заявок, кожна з яких подана одночасно з цією заявкою і кожна з яких повністю міститься в даному документі: "Optimized Ordering of Assistance Data in the Mobile Radio Network" автора Kirk Allan Burroughs (адвокатська виписка 072346); "Improve GPS Yield For Emergency Calls in the Mobile Radio Network" автора Thomas Rowland (адвокатська виписка 080114); і "Dynamic Measure Position Request Processing in the Mobile Radio Network" автора Thomas Rowland (адвокатська виписка 080116). Фіг. 1Α, 1В і 1С показують різні компоненти і інтерфейси в бездротовій мережі. Для простоти, нижчеприведений опис використовує загальну термінологію, яка використовується в бездротових мережах, або конкретну термінологію, яка використовується відносно конкретного стандарту, хоч технології, описані в даному документі, можуть бути застосовними до декількох різних стандартів бездротової мережі. Наприклад, така бездротова мережа містить в собі систему множинного доступу з кодовим розділенням каналів (CDMA), яка є цифровою бездротовою технологією з високою пропускною здатністю, яка створена і розроблена з комерційними цілями компанією QUALCOMM Incorporated. Інша бездротова мережа містить в 6 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 собі глобальну систему мобільного зв'язку (GSM), яка використовує альтернативну цифрову бездротову технологію. Ще одна бездротова мережа містить в собі універсальну систему мобільного зв'язку (UMTS), яка є цифровою бездротовою технологією з високою пропускною здатністю наступного покоління. Фіг. 1А містить в собі мобільну станцію (MS 10), підсистему базової станції (BSS 20), яка включає в себе базову приймально-передавальну станцію (BTS 22) і контролер базової станції (BSC 24), центр комутації мобільного зв'язку (MSC 30), комутовану телефонну мережу загального користування (PSTN) і обслуговуючий центр визначення місцеположення мобільного термінала (SMLC). MS 10 є будь-яким пристроєм мобільного бездротового зв'язку, таким як стільниковий телефон, який має модем для передачі в смузі модулюючих частот для обміну даними з однією або більше базовими станціями. MS, які згадуються в цьому розкритті, включають в себе приймальний пристрій GPS або еквівалентний приймальний пристрій, щоб надавати можливості визначення місцеположення. Термін "GPS", що використовується нижче, використовується в загальному значенні для того, щоб означати супутникову або псевдосупутникову систему. MS 10 і BTS 22 здійснюють зв'язок в бездротовому режимі по RFрадіоінтерфейсу, який називається Um-інтерфейсом. Одна або більше MS 10 можуть здійснювати зв'язок з BTS 22 або BSS 20 одночасно. Внутрішньо для BSS 20, BTS 22 може виконувати передачу в BSC 24 по Abis-інтерфейсу. Один BSC 24 може підтримувати декілька BTS 22 в розгортуваній мережі. У даному документі, при посиланні на повідомлення Umрадіоінтерфейсу від мережі (низхідна лінія зв'язку) і від MS 10 (висхідна лінія зв'язку), ці повідомлення можуть згадуватися як такі, що передаються за допомогою BTS 22 або, еквівалентно, за допомогою BSS 20. Lb-інтерфейс приєднує BSC 24 з SMLC 50. При посиланні на повідомлення низхідної і висхідної ліній зв'язку Lb-інтерфейсу ці повідомлення можуть згадуватися як такі, що передаються за допомогою BSC 24 або, еквівалентно, за допомогою BSS 20. Один або більше BSC 24 і/або BSS 20 можуть бути приєднані до MSC 30 за допомогою Α-інтерфейсу. MSC 30 з'єднує комутовану лінію з PSTN 40 з MS 10, щоб надавати мовний виклик по мережі загального користування. Інші елементи мережі або компоненти мережі можуть бути підключені до BSS 20, MSC 30 і PSTN 40, щоб надавати інші послуги. Наприклад, SMLC 50 може бути приєднаний до мережі, щоб надавати послуги визначення місцеположення, і показаний підключеним до BSC 24 по Lb-інтерфейсу. SMLC 50 також може бути підключений до бездротової мережі через MSC 30 і Ls-інтерфейс. SMLC 50 надає повну координацію для знаходження мобільних станцій і також може обчислювати кінцеве оцінене місцеположення і оцінену точність, що досягається. SMLC 50 використовується, в цілому, в даному документі для того, щоб означати сервер визначення місцеположення, який також згадується як об'єкт визначення місцеположення (PDE) в рамках CDMA-мереж, обслуговуючий центр визначення місцеположення мобільного термінала (SMLC) в рамках GSM-мереж і автономному (A-GPS) SMLC (SAS) в рамках стільникових мереж WCDMA. Сервер визначення місцеположення - це системний ресурс (наприклад, сервер), типово в рамках бездротової мережі, який працює разом з одним або більше приймальними пристроями опорних GPS-сигналів, який допускає обмін пов'язаною з GPS інформацією з MS. У A-GPSсеансі з використанням MS сервер визначення місцеположення відправляє допоміжні дані GPS в MS, щоб поліпшувати процес виявлення сигналу. MS може повертати вимірювання псевдодальності назад серверу визначення місцеположення, який потім допускає обчислення місцеположення MS. Альтернативно, в основаному на MS сеансі А-GPS, MS відправляє обчислені результати місцеположення назад на сервер визначення місцеположення. Фіг. 1В показує багаторівневу модель Um- і Lb-інтерфейсів. Рівні в MS 10 (цільовий MS) включають в себе перший рівень, який називається фізичним рівнем, рівнем один або L1, другий рівень, який називається L2 (LAPDm), третій рівень, який називається рівнем радіоресурсів (RR), що моделюється згідно з технічними вимогами GSM 04.08, і, на завершення, прикладний рівень. У цьому випадку, прикладний рівень - це протокол визначення місцеположення на основі радіоресурсів (RRLP), заданий в рекомендаціях GSM 04.31 і GSM 04.35. BSS 20 (показана як BSC 24) має відповідну багаторівневу модель, що містить в собі рівні L1, L2 (LAPD) і RR, де RRLP-повідомлення проходять через BSS 20. BSS 20 ретранслює нижні рівні по мірі необхідності в SMLC 50 по Lb-інтерфейсу. Рівні включають в себе рівні МТР, SCCP BSSLAP-LE і BSSLAP, які відповідають рівням МТР, SCCP BSSLAP-LE і BSSLAP в рамках SMLC 50. Додаткову інформацію по інтерфейсах BSSAP-LE і BSSLAP див. в рекомендаціях GSM 09,21 і GSM 08.71. Повідомлення, які проходять від одного елемента мережі до іншого елемента мережі, можуть пройти через декілька різних інтерфейсів і відповідних протоколів. Наприклад, повідомлення, що проходять від SMLC сервера визначення місцеположення 50 до BSS 20 до 7 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 MS 10, повинні передаватися як перше повідомлення через Lb-інтерфейс, можливо, інше повідомлення через Abis-інтерфейс і кінцеве повідомлення через Um-інтерфейс. В цілому, в даному розкритті, для простоти повідомлення згадується по його назві прикладного рівня і радіоінтерфейсу. Наприклад, запит від SMLC сервера визначення місцеположення 50, призначений для MS 10, може згадуватися по назві прикладного рівня Um-радіоінтерфейсу запиту на вимірювання місцеположення по протоколу RRLP. Додатково, для ясності, BSS 20 і SMLC 50 можуть спільно згадуватися як мережа 70, яка може містити в собі BTS 22, BSC 24 і SMLC 50 або може містити в собі BSS 20 і SMLC 50. Фіг. 1С показує блок-схему послідовності повідомлень звичайного RRLP-сеансу. У час а, SMLC 50 відправляє повідомлення запиту 80 в BSS 20 через Lb-інтерфейс. BSS 20 повторно пакетує і перенаправляє цей запит як RRLP-запит 85, що передається через Umрадіоінтерфейс низхідної лінії зв'язку, в MS 10. Внутрішньо, MS 10 починає RRLP-сеанс і, зрештою, відповідає через Um-радіоінтерфейс висхідної лінії зв'язку з повідомленням відповіді RRLP 90. BSS 20 знов повторно пакетує і перенаправляє цю відповідь в SMLC 50 в повідомленні відповіді 95 через Lb-інтерфейс, який SMLC 50 приймає як час b. В подальшому в цьому документі, такі запити і відповіді в і від SMLC 50 згадуються як RRLP-запити і RRLPвідповіді. Прикладний рівень 3 GPP RRLP в даний момент підтримує п'ять повідомлень. Перше повідомлення - це повідомлення запиту на вимірювання місцеположення по протоколу RRLP, що використовується в низхідній лінії зв'язку. Мережа 70 використовує це повідомлення для того, щоб запитувати вимірювання місцеположення або оцінку місцеположення від MS 10. Повідомлення містить в собі інструкції для MS 10 і також може містити в собі допоміжні дані для MS 10. Допоміжні дані детальніше описуються нижче. Друге повідомлення - це повідомлення відповіді по вимірюванню місцеположення по протоколу RRLP, що використовується у висхідній лінії зв'язку, і воно доповнює повідомлення запиту на вимірювання місцеположення по протоколу RRLP. MS 10 використовує це повідомлення для того, щоб відповідати мережі 70 з інформацією про оцінку місцеположення і іншою пов'язаною з місцеположенням інформацією. Повідомлення запиту на вимірювання місцеположення по протоколу RRLP і повідомлення відповіді по вимірюванню місцеположення по протоколу RRLP працюють разом, щоб починати і закінчувати RRLP-сеанс. Третє і четверте повідомлення також працюють разом, щоб починати і закінчувати RRLPсеанс. Третє повідомлення - це інше повідомлення низхідної лінії зв'язку, що згадується як повідомлення допоміжних даних RRLP, яке мережу 70 використовує для того, щоб відправляти допоміжні дані в MS 10. Допоміжні дані необов'язково включають в себе опорну інформацію BTS згідно з вдосконаленою різницею, що відстежується у часі (E-OTD) (наприклад, сигналізацію BTS і інформацію місцеположення) і інформацію про вимірювання Е-OTD для восьми додаткових BTS. Четверте повідомлення - це повідомлення підтвердження прийому (Аск) допоміжних даних RRLP, що використовується у висхідній лінії зв'язку. Повідомлення підтвердження прийому допоміжних даних RRLP використовується за допомогою MS 10 просто для того, щоб підтверджувати, в мережу 70, прийом повідомлення допоміжних даних RRLP. П'яте повідомлення - це нетипове повідомлення, яке називається помилкою протоколу RRLP, яке може використовуватися в низхідній лінії зв'язку або у висхідній лінії зв'язку для того, щоб повідомляти звіт про помилку в протоколі. Фіг. 2 показує блок-схему послідовності повідомлень типового процесу визначення місцеположення з використанням RRLP-сеансів. MS 10 і мережа 70 можуть розглядатися як клієнт-серверна модель, де MS 10 виступає як клієнт, а мережа 70 виступає як сервер. RRLPсеанс починається із запиту від мережі 70 і типово завершується відповіддю від MS 10. У час а, процес визначення місцеположення починається з повідомлення за допомогою мережі 70 і MS 10 повідомленням 110 допоміжних даних RRLP. Таким чином, мережа 70 відправляє повідомлення 110 допоміжних даних RRLP в MS 10, і MS 10 починає новий RRLP-сеанс при прийомі повідомлення 110 допоміжних даних RRLP. Звичайно, як показано у час b, MS 10 виконує RRLP-сеанс з відповіддю по підтвердженню прийому, що називається повідомленням 112 підтвердження прийому допоміжних даних RRLP. У час с, мережа 70 відправляє повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, яке містить в собі інструкцію місцеположення і необов'язково допоміжні дані. Інструкція місцеположення від мережі 70 містить в собі максимальний час відгуку (відгук мережі), що задається за допомогою мережі (NW), і мінімальну точність (точність мережі), також що задається за допомогою мережі (NW). У відповідь на прийом повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, відома мобільна станція запускає свій GPSмеханізм. GPS використовується, в цілому, щоб означати систему визначення місцеположення 8 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 з використанням штучних супутників (SV) і/або псевдосупутників. Механізм також використовується, в цілому, як апаратні засоби і/або мікропрограмне забезпечення і/або програмне забезпечення, яке працює для того, щоб обробляти дані. MS 10 потім визначає одну або більше фіксацій місцеположення, кожна з яких має оцінену невизначеність. Якщо оцінена невизначеність менша ніж або дорівнює мінімальній точності мережі (точності мережі), яка сигналізується за допомогою мережі 70, або якщо MS 10 обчислює визначення місцеположення протягом максимально дозволеного за допомогою значення параметра часу відгуку мережі (відгуку мережі), обробка визначення місцеположення зупиняється. Як показано у час d, MS 10 повідомляє звіт про обчислене визначення місцеположення в повідомленні 122 відповіді по вимірюванню місцеположення по протоколу RRLP і також вимикає GPS-механізм. Відмінність у часі між прив'язками за часом с і d може бути істотною (наприклад, від 45 секунд до декількох хвилин). Одна мета при визначенні місцеположення полягає в тому, щоб мінімізувати цей час виявлення. Інша мета полягає в тому, щоб зменшувати невизначеність визначення місцеположення, що надається. Фіг. 3 показує псевдосегментацію допоміжних даних. Допоміжні дані можуть містити в собі дані місцеположення по одному або більше штучних супутниках (SV). Оскільки допоміжні дані типово містять інформацію про 8-12 або більше супутників, допоміжні дані розділяються на декілька блоків псевдосегментованих повідомлень допоміжних даних, при цьому кожний блок містить інформацію про один, два, три або чотири супутники. У показаному прикладі, допоміжні дані сегментують на три псевдосегменти. Перші два блоки можуть містити інформацію про три або чотири супутники, і кінцевий блок може містити інформацію про один, два або три супутники всього для семи-одинадцяти супутників в показаному прикладі. Перший блок допоміжних даних повідомляють від мережі 70 в MS 10 у час а в першому повідомленні 140 допоміжних даних RRLP. Після прийому, перший сеанс RRLP починається, але швидко закінчується, коли MS 10 відправляє повідомлення 142 підтвердження прийому допоміжних даних RRLP в мережу 70 у час b. Другий блок допоміжних даних повідомляють від мережі 70 в MS 10 у час с у другому повідомленні 144 допоміжних даних RRLP. Після прийому, другий сеанс RRLP починається. У цьому прикладі у час d, MS 10 не має часу, щоб передавати повідомлення підтвердження прийому до того, як вона приймає друге RR-повідомлення (що згадується тут як додаткове RRповідомлення 130), яке закінчує RRLP-сеанс, створений за допомогою повідомлення 144. Додаткове RR-повідомлення може бути будь-яким з декількох різних RR-повідомлень. Наприклад, RR-повідомлення з більш високим пріоритетом, таке як повідомлення передачі обслуговування, можливо, передане в MS 10. Сеанс називається перерваним по пріоритету, якщо або MS 10 приймає частину RRLPповідомлення низхідної лінії зв'язку або взагалі не приймає RRLP-повідомлення низхідної лінії зв'язку. Переривання по пріоритету здійснюється, коли повідомлення вміщується у вихідну чергу мережі для передачі. У деяких випадках, до того як передача RRLP-повідомлення низхідної лінії зв'язку може бути завершена, частина повідомлення, що залишилася, ще не переданого, очищається з черги для повідомлення з більш високим пріоритетом. У цих випадках, MS 10, можливо, прийняла частину, але не всі RRLP-повідомлення низхідної лінії зв'язку. У інших випадках, RRLP-повідомлення низхідної лінії зв'язку очищають навіть до того, як перший біт повідомлення переданий по радіоінтерфейсу. У цих випадках, сеанс також вважається перерваним по пріоритету, проте, MS 10 не має відомостей про існування сеансу. Часто переривання по пріоритету здійснюється, коли RRLP-повідомлення низхідної лінії зв'язку є довгим або коли більш довгі повідомлення знаходяться перед ним (тобто інші повідомлення, диспетчеризовані на більш ранній час передачі) в цій черзі в низхідній лінії зв'язку. З іншого боку, сеанс згадується як припинений, якщо MS 10 приймає всі RRLP-повідомлення низхідної лінії зв'язку, але ще не повністю відправила відповідь, таку як повідомлення підтвердження прийому допоміжних даних RRLP. Припинення звичайно здійснюється, коли MS 10 необхідний відносно тривалий період часу для того, щоб відповідати на RRLP-повідомлення низхідної лінії зв'язку. Як у випадках переривання по пріоритету, так і у випадках припинення, існуючий сеанс в MS 10 і/або мережі 70 закінчується. Одна мета полягає в тому, щоб MS 10 швидко відповідала на RRLP-повідомлення низхідної лінії зв'язку, тим самим мінімізуючи число припинених сеансів. Інша мета полягає в тому, щоб мережа відправляла більш короткі RRLP-повідомлення низхідної лінії зв'язку, тим самим підтримуючи чергу менш заповненою і мінімізуючи число перерваних по пріоритету сеансів. Псевдосегментація призначена для другої мети створення більш коротких RRLP-повідомлень низхідної лінії зв'язку, тим самим зменшуючи імовірність перерваного по пріоритету сеансу, але не дозволяє першу мету швидкого реагування на повідомлення 9 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 низхідної лінії зв'язку, як додатково описане нижче для обробки, асоційованої з повідомленнями запиту на вимірювання місцеположення по протоколу RRLP. Надалі в цьому документі, терміни "припинення", "припиняти" або "припинений" використовуються при посиланні на завершення сеансу, що викликається або за допомогою припинення сеансу внаслідок прийому додаткового RR-повідомлення, або за допомогою переривання по пріоритету в черзі в низхідній лінії зв'язку відповідно до повідомлення низхідної лінії зв'язку з більш високим пріоритетом. Щоб відновлюватися після припиненого сеансу, мережа 70 передає повторне повідомлення. Повторне повідомлення - це подальша передача повідомлення, раніше вміщеного в чергу в низхідній лінії зв'язку. У прикладі, показаному у час є, другий блок допоміжних даних включається в повторне повідомлення допоміжних даних RRLP 148, яке починає третій RRLPсеанс в MS 10. MS 10 підтверджує прийом з іншим повідомленням підтвердження прийому допоміжних даних RRLP 150 в мережу 70 у час f. Кінцевий блок допоміжних даних передають від мережі 70 в MS 10 у час g в повідомленні 120 запиту на вимірювання місцеположення по протоколу RRLP, яке приймають за допомогою MS 10, і починає четвертий сеанс в цьому прикладі. MS 10 тепер інструктується починати визначення місцеположення, що може займати від декількох десятків секунд до декількох хвилин. Протягом періоду від прийому інструкції до передачі відповіді сеанс є вразливим для припинення сеансу за допомогою додаткового RR-повідомлення. У цьому прикладі, кінцевий сеанс не припиняється, а замість цього MS 10 відповідає повідомленнями 122 відповіді по вимірюванню місцеположення по протоколу RRLP у час h. Фіг. 4 і 5 ілюструють зупинку визначення місцеположення на основі прийому за допомогою MS 10 додаткового RR-повідомлення. На фіг. 4 у час а, мережа 70 відправляє в MS 10 повідомлення 110 допоміжних даних RRLP, потім у час b, MS 10 відповідає з повідомленням 112 підтвердження прийому допоміжних даних RRLP. Мережа 70 і MS 10 можуть повторювати цей обмін повідомленнями декілька разів, щоб надавати ті, що залишилися з допоміжних даних в MS 10 до запуску GPS-механізму. У час с, мережа 70 відправляє MS 10 повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP з кінцевим блоком допоміжних даних. Тут, MS 10 запускає свій GPS-механізм і починає визначення місцеположення. У час d, мережа 70 відправляє в MS 10 додаткове RR-повідомлення 130 (тобто повідомлення, яке MS 10 не чекає приймати, оскільки вона знаходиться в поточному сеансі). Це додаткове RR-повідомлення 130, яке надане до того, як MS 10 може передавати повідомлення у відповідь, інструктує MS 10 припиняти поточний сеанс, запущений за допомогою повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Як частина припинення сеансу, MS 10 вимикає GPS-механізм, закінчує процес визначення місцеположення, відповідає на додаткове RR-повідомлення 130 і чекає наступного запиту від мережі 70. Після короткої затримки t у час e (де t=e-d), мережа 70 передає повтор повідомлення 120А запиту на вимірювання місцеположення по протоколу RRLP, яке інструктує MS 10 перезапускати свій GPS-механізм і починати визначення місцеположення знов. Цей процес відправки повторного повідомлення 120А, за яким йде обривання за допомогою додаткового RR-повідомлення 130, може відбуватися декілька разів до того, як MS 10 зможе визначити своє місцеположення в рамках часу відгуку мережі і параметрів точності, що надаються. У час f, MS 10 повідомляє звіт про певне місцеположення в мережу 70 в повідомленні 122 відповіді по вимірюванню місцеположення по протоколу RRLP. Фіг. 5 показує цей обмін повідомленнями в формі діаграми станів. Коли MS 10 приймає повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, MS 10 переходить в стан 200, який запускає GPS-механізм і починає визначення місцеположення. У звичайному безперервному режимі MS визначає місцеположення 220 і повідомляє звіт про місцеположення мережі за допомогою переходу в стан 230, який відправляє повідомлення 122 відповіді по вимірюванню місцеположення по протоколу RRLP. Коли місцеположення не може бути визначене в рамках часу відгуку мережі, що надається (наприклад, коли виникає тайм-аут часу відгуку), MS 10 може виходити зі стану 200 і перейти в стан 230, де MS 10 відповідає з повідомленням 122 відповіді по вимірюванню місцеположення по протоколу RRLP, що містить визначення місцеположення з точністю, меншою, ніж що запитується за допомогою мережі. Діаграма станів показує інші випадки, які можуть відбуватися. Наприклад, MS 10 виходить зі стану 200 і переходить в стан 210, коли вона приймає додаткове RR-повідомлення 130. У стані 210, MS 10 вимикає GPS-механізм і зупиняє визначення місцеположення. MS 10 виходить зі стану 210 і повторно входить в стан 200, коли вона приймає повторне повідомлення 120А запиту на вимірювання місцеположення по протоколу RRLP. Зрештою, MS 10 звичайно або 10 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 визначає місцеположення, або вичерпує ліміт часу 220 і переходить в стан 230, щоб відповідати з повідомленням 122 відповіді по вимірюванню місцеположення по протоколу RRLP. У процесі визначення місцеположення, описаному вище, MS 10 чекає до повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP перед запуском свого GPSмеханізму і вимикає свій GPS-механізм, коли вона приймає додаткове RR-повідомлення 130, тим самим мінімізуючи тривалість часу, коли GPS-механізм працює. За допомогою запуску GPS-механізму у відповідь на прийом повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, MS 10 знає, що мережі 70 потрібне визначення місцеположення. У будь-якому іншому випадку, відсутня гарантія того, що мережа 70 не буде запитувати визначення місцеположення з MS 10. Отже, за допомогою відмови від запуску до цього часу MS 10 економить живлення акумулятора. MS 10 також економить живлення акумулятора за допомогою вимкнення GPS-механізму, як тільки RRLP-сеанс завершений (наприклад, внаслідок припинення або звіту по визначенню місцеположення). Відповідно до деяких варіантів здійснення даного винаходу, переваги можуть бути реалізовані за допомогою відмови від слідування відомій процедурі і запуску замість цього GPSмеханізму в припущенні прийому повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Крім того, переваги можуть бути реалізовані за допомогою відмови від вимкнення GPS-механізму, як тільки RRLP-сеанс завершений. За рахунок витрати енергії акумулятора GPS-механізм може бути запущений раніше (тобто до того як повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP приймається) і може продовжувати процес визначення місцеположення, навіть якщо RRLP-сеанс закінчений. Фіг. 6 і 7 показують події, які запускають і вимикають GPS-механізм, відповідно до варіантів здійснення даного винаходу. Діаграма станів по фіг. 6 показує два стани: стан 800, де GPSмеханізм не працює, і стан 810, де GPS-механізм запущений, і процес визначення місцеположення початий. Може відбуватися декілька ініціюючих подій з боку користувача і сторони мережі, які ініціюють ранній запуск GPS-механізму в припущенні майбутнього прийому повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Ініціююча подія відбувається з початку робочого режиму. Тобто, ініціююча подія - це не просто увімкнення мобільної станції, яке переводить мобільну станцію в робочий режим. Деякі пристрої завжди запускають GPS-механізм, і таким чином, відсутня ініціююча подія для того, щоб запускати GPS-механізм. Ініціююча подія не є користувацькою операцією для того, щоб спеціально вмикати функцію визначення місцеположення по GPS мобільній станції. Ініціююча подія - це подія, яка в типовому варіанті не вмикає GPS-механізм. Крім того, ініціююча подія відбувається до прийому повідомлення запиту на вимірювання місцеположення по протоколу RRLP, яке є повідомленням, яке типово вмикає GPS-механізм. Спочатку на 820, якщо MS 10 виявляє ініціюючу подію, що виклик служб екстреної допомоги (ES) ініційований, MS 10 може перейти зі стану 800 в стан 810. Ініційований стороною іншого користувача перехід може здійснюватися, якщо MS 10 прийняла повідомлення від додатку мобільної станції (MS APP), яке вказує на те, що потрібне визначення місцеположення. Події сторони мережі також можуть ініціювати перехід зі стану 800 в стан 810. Наприклад, на 840, якщо MS 10 приймає ініціюючу подію нового повідомлення допоміжних даних RRLP, MS 10 може перейти зі стану 800 в стан 810. На 850, якщо MS 10 приймає ініціюючу подію в формі повідомлення додаткових платних послуг (VAS), MS 10 може перейти зі стану 800 в стан 810. Для повноти, на 860, відомий процес переходу між станами показаний за допомогою прийому повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Крім раннього запуску, як описано з посиланням на фіг. 6, вимкнення GPS-механізму може бути переважно відкладене, як показано на фіг. 7, що також містить в собі два стани. У стані 900, GPS-механізм запущений (наприклад, внаслідок однієї з подій, описаних вище). У стані 910, GPS-механізм вимикається. Декілька подій можуть ініціювати перехід зі стану 900 в стан 910, щоб вимикати GPS-механізм. Наприклад, може витягуватися місцеположення, або може виникати тайм-аут. На 920, перехід здійснюється внаслідок недавньої відправки повідомлення 122 відповіді по вимірюванню місцеположення по протоколу RRLP, коли немає іншої істотної потреби для продовження роботи механізму, наприклад, очікування за допомогою MS APP більш оптимального визначення місцеположення. Перехід також може здійснюватися, коли визначення місцеположення щойно повідомлено в звіті в MS APP, і MS 10 не передбачає повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP і не чекає відправляти повідомлення 122 відповіді по вимірюванню місцеположення по протоколу RRLP. Анормальні випадки також можуть викликати перехід. Наприклад, на 940, якщо MS 10 передбачала повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP (наприклад, внаслідок подій 820 або 840, описаних вище), але не приймала повідомлення 11 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 протягом попередньо визначеного періоду часу (наприклад, 45, 60 або 90 секунд або значення, вибираного з діапазону часів в 30-60, 30-90, 30-120, 30-180, 30-240, 60-90, 60-120, 60-180, 60240, 90-120, 90-180, 90-240, 120-180, 120-240 і т. п. як повинні розуміти фахівці в даній галузі техніки), MS 10 може вимикати свій GPS-механізм. Аналогічно на 940, якщо GPS-механізм виконувався дуже довго (наприклад, 120 або 180 секунд), MS 10 може вичерпувати ліміт часу і вимикати GPS-механізм, щоб економити енергію акумулятора. Фіг. 8 показує блок-схему послідовності повідомлень, що ілюструє раннє визначення місцеположення, відповідно до варіантів здійснення даного винаходу. Одна мета полягає в тому, щоб запускати GPS-механізм, як тільки MS 10 чекає або передбачає майбутнє повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP від мережі 70. У час a, MS 10 розпізнає цифри, що набираються для виклику служб екстреної допомоги (наприклад, "911" в США, "112" в Європі або "119" в Японії). Як тільки виклик розпізнаний як виклик служб екстреної допомоги, MS 10 може починати визначення місцеположення за допомогою запуску свого GPS-механізму в очікуванні потреби у визначенні місцеположення MS 10. У час b, мережа 70 відправляє повідомлення 110 допоміжних даних RRLP в MS 10. У відповідь, у час с, MS 10 відповідає з повідомленням 112 підтвердження прийому допоміжних даних RRLP. Цей процес відправки повідомлень 110 і 112 може повторюватися доти, поки мережа 70 не передала достатньо допоміжних даних. На завершення, у час d, мережа 70 відправляє повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP в MS 10. MS 10 продовжує визначати своє місцеположення. Потім у час e, MS 10 відповідає в мережу 70 з повідомленням 122 відповіді по вимірюванню місцеположення по протоколу RRLP, що містить її визначене місцеположення. Фіг. 9 і 10 ілюструють спосіб продовження визначення місцеположення після того, як додаткове RR-повідомлення 130 прийняте, відповідно до варіантів здійснення даного винаходу. Інша мета полягає в тому, щоб продовжувати роботу GPS-механізму через незначні анормальні події. На фіг. 9, додаткове RR-повідомлення 130 припиняє поточний сеанс вимірювання, але MS 10 продовжує обробку визначення місцеположення і не обриває роботу свого GPS-механізму. У час a, MS 10 приймає повідомлення 110 допоміжних даних RRLP від мережі 70. У відповідь у час b, MS 10 відповідає з повідомленням 112 підтвердження прийому допоміжних даних RRLP. З іншого боку, цей процес відправки повідомлень 110 і 112 може повторюватися доти, поки мережа 70 не передала достатньо допоміжних даних. У час с, мережа 70 відправляє повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP в MS 10. На цій стадії GPS-механізм вже запущений або на основі розпізнавання за допомогою MS 10 екстреного виклику, або на основі іншої ініціюючої події. У час d, до того, як мережа 70 приймає відповідь, мережа 70 обриває RRLP-сеанс, початий у час с. Відомі мобільні станції закінчують RRLP-сеанс і також вимикають GPS-механізм. Тут, MS 10 не обриває роботу GPS-механізму, щоб давати можливість йому продовжувати процес визначення місцеположення. На завершення, у час e, мережа 70 повторно відправляє повідомлення 120А запиту на вимірювання місцеположення по протоколу RRLP в MS 10 в процесі повторного запиту. З іншого боку, MS 10 не перезапускає GPS-механізм, а замість цього продовжує процес визначення місцеположення. Як указано вище, процеси припинення і повторів можуть повторюватися. Потім у час f, MS 10 відповідає в мережу 70 з повідомленням 122 відповіді по вимірюванню місцеположення по протоколу RRLP, що містить її визначене місцеположення. Фіг. 10 показує діаграму станів. MS 10 переходить в стан 300, коли відбувається ініціююча подія. Ініціюючі події включають в себе прийом повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, прийом повідомлення 110 допоміжних даних RRLP, розпізнавання ініціювання виклику служб екстреної допомоги і т. п. В стані 300, MS 10 продовжує визначення місцеположення, якщо вже працює, або починає визначення місцеположення за допомогою запуску GPS-механізму, якщо ще не запущений. Звичайно, MS 10 виходить зі стану 300 або коли місцеположення визначається, або коли час закінчується (показано як перехід 310), і переходить в стан 320. Тайм-аут може, наприклад, мати місце коли MS 10 визначає те, що мережа 70 чекає вимірювання в рамках невеликої попередньо визначеної кількості часу. У деяких випадках, MS 10 виходить зі стану 300 і переходить в стан 330, коли MS 10 приймає додаткове RR-повідомлення 130, яке припиняє поточний RRLP-сеанс до того, як MS 10 може відправляти свою відповідь. У стані 330, MS 10 припиняє поточний RRLP-сеанс, але продовжує визначення місцеположення. При прийомі повторного повідомлення 120А запиту на вимірювання місцеположення по протоколу RRLP, MS 10 переходить в стан 340, але знов продовжує процес 12 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 визначення місцеположення. Як тільки MS 10 визначає місцеположення або виникає тайм-аут (показаний як перехід 340), MS 10 виходить зі стану 340 і переходить в стан 320. У стані 320, MS 10 відправляє своє повідомлення відповіді по вимірюванню місцеположення по протоколу RRLP 320 в мережу 70. Фіг. 11 і 12 ілюструють спосіб оптимального упорядкування завантажених допоміжних даних, відповідно до варіантів здійснення даного винаходу. Допоміжні дані можуть бути передані в одному або більше (псевдосегментованих) повідомлення 110 допоміжних даних RRLP і/або в повідомленні 120 запиту на вимірювання місцеположення по протоколу RRLP. Оптимальне упорядкування передачі допоміжних даних з мережі 70 в MS 10 дає можливість MS 10 переважно починати процес визначення місцеположення раніше і активно використовувати сегменти допоміжних даних до відповідного інструктування за допомогою повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Фіг. 11 показує оптимальне упорядкування сегментованих допоміжних даних 400. Перший сегмент містить в собі опорну інформацію 410, що містить в собі супутниковий час і приблизне місцеположення 420 MS. Перший і сегменти, які залишилися, включають в себе інформацію 430 місцеположення штучного супутника (в тому числі дані альманахів і ефемерид). Інформація 430 місцеположення штучних супутників упорядковується від найбільш оптимальних 440 до наступних по оптимальності 450 і продовжується до найменше оптимальних 460. Не всі доступні супутники повинні вміщуватися в цей оптимально впорядкований список допоміжних даних. Оптимальне упорядкування супутників може брати до уваги один або більше чинників, щоб надавати в MS 10 набір супутників, видимих з найбільшою імовірністю і корисних для MS 10 в тому, щоб швидко визначати її місцеположення. Наприклад, знання приблизного місцеположення MS може використовуватися для того, щоб виконувати пошук місцеположень супутника, показаних емпірично як видимі для мобільних станцій з аналогічними приблизними місцеположеннями MS. Мережа 70 може виконувати пошук супутників, які знаходяться в області простору, показаній за допомогою спостереження або експериментування, які повинні бути доступними для мобільної станції, що має аналогічне або ідентичне приблизне місцеположення MS. Крім того, знання приблизного місцеположення MS може використовуватися для того, щоб визначати загальну характеристику оточення. Ця характеристика оточення може використовуватися для того, щоб ідентифікувати оптимальні супутники, щоб давати можливість MS 10 визначати своє місцеположення. Приблизне місцеположення MS може ідентифікувати MS 10 як розташовану, наприклад, в сільському ландшафті (наприклад, в плоскому сільському оточенні), в гірському ландшафті (наприклад, в орієнтованій з півночі на південь долині або вздовж західного схилу гори) або в міському ландшафті (наприклад, в щільному центрі міста з висотними будівлями). Якщо приблизне місцеположення MS вказує, що MS 10, найвірогідніше, має повну видимість неба, мережа 70 може спочатку надавати інформацію місцеположення супутників для ортонормованого або псевдоортонормованого набору супутників, наприклад, трьох супутників, найближчих до 45 градусів від горизонту, розділених на 120 градусів один від одного. Будь-які два з цих трьох супутників приблизно ортогонально орієнтовані відносно мобільної станції. Таким чином, перша лінія між першим супутником і мобільною станцією і друга лінія між другим супутником і мобільною станцією формує (ортонормований) прямий кут або кут від 60 до 120 градусів (приблизно ортогонально орієнтований). Якщо приблизне місцеположення MS пропонує, що MS 10 не може бачити супутники, які знаходяться в конкретній області простору (наприклад, якщо гора блокує небо зі сходу), то інформація місцеположення для цих супутників може знаходитися нижче в оптимальному списку супутників (або навіть взагалі видалятися зі списку). У доповнення до опорної інформації 410, перший сегмент допоміжних даних також може містити в собі інформацію про один або два супутники, відповідно до допустимої довжини повідомлення. Перший сегмент містить в собі інформацію місцеположення супутників, які є найбільш оптимальними 440 для MS 10. Другий сегмент допоміжних даних містить в собі інформацію місцеположення супутників для наступних двох, трьох або найбільш оптимальних супутників 450. Кожний подальший сегмент допоміжних даних містить в собі інформацію місцеположення супутників для однакової або меншої кількості оптимальних супутників доти, поки набір найменше оптимальних 460 супутників не досягнутий. Фіг. 12 показує блок-схему послідовності операцій способу для упорядкування і відправки сегментів допоміжних даних. На етапі 500, мережа 70 упорядковує список супутників від найбільш оптимального до найменш оптимального в MS 10, щоб формувати впорядкований список, обидва списки, які також можуть зберігатися в запам'ятовуючому пристрої в рамках 13 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 мережі 70. Порядок може бути конкретним для кожної MS 10. Наприклад, порядок може залежати від приблизного місцеположення MS. На етапі 510, мережа 70 відправляє перше сегментоване повідомлення 110 допоміжних даних RRLP, що містить в собі опорну інформацію (тобто початок відліку часу і приблизне місцеположення MS) і інформацію місцеположення супутників для найбільш оптимальних супутників. На етапі 520, мережа 70, наприклад, за допомогою логіки контролера або контролера в рамках мережі 70, визначає те, настав чи ні час відправляти повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Мережа 70 може визначати те, що настав час відправляти повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, якщо достатні допоміжні дані вже відправлені в MS 10. Якщо MS 10 має інформацію місцеположення супутників щонайменше для попередньо визначеного числа супутників (наприклад, 4-14 супутників), то мережа 70 може визначати те, що MS 10 має достатній об'єм допоміжних даних. Альтернативно, якщо попередньо визначене число супутників не досягнуте, але більше немає доступної інформації по супутниках для того, щоб передавати повідомлення допоміжних даних, мережа може або передавати повідомлення запиту на вимірювання місцеположення по протоколу RRLP (з або без кінцевого фрагмента допоміжних даних), або може задавати таймер так, що повідомлення запиту на вимірювання місцеположення по протоколу RRLP відправляється, щоб приймати повідомлення відповіді по вимірюванню місцеположення по протоколу RRLP своєчасно. Альтернативно, мережа 70 може визначати те, що MS 10 має достатній об'єм допоміжних даних, якщо час, що залишився до того, як визначення місцеположення необхідне за допомогою мережі 70, менший попередньо визначеної кількості часу. У цьому випадку, мережа 70 визначає те, що настав час відправляти повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, якщо виник тайм-аут. Альтернативно, мережа 70 може визначати те, що настав час відправляти повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, якщо всі допоміжні дані раніше відправлені. Якщо не час відправляти повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, мережа 70 може перейти до етапу 530. Якщо настав час відправляти повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, мережа 70 може перейти до етапу 540. На етапі 530, мережа 70 відправляє наступне сегментоване повідомлення 110 допоміжних даних RRLP, що містить в собі інформацію місцеположення для групи наступних найбільш оптимальних супутників, потім повертається до етапу 520. Цей цикл між етапами 520 і 530 може повторюватися велику кількість разів. На етапі 540, мережа 70 відправляє повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP може містити кінцевий сегмент допоміжних даних. Альтернативно, в повідомленні 120 запиту на вимірювання місцеположення по протоколу RRLP взагалі можуть бути відсутні допоміжні дані, як детально пояснюється нижче. Фіг. 13 і 14 показують спосіб відправки своєчасних запитів місцеположення, відповідно до варіантів здійснення даного винаходу. На фіг. 13, у час а, мережа 70 починає RRLP-сеанс за допомогою відправки RRLPповідомлення, такого як повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Цей сценарій передбачає, що мережа 70 успішно відправила одне або більше повідомлень 110 допоміжних даних RRLP в MS 10, або що MS 10 вже має допоміжні дані в запам'ятовуючому пристрої. У показаному прикладі, мережа 70 вимагає визначення місцеположення від MS 10 приблизно через 35 секунд. У час b, RRLP-сеанс припиняється внаслідок деякого іншого RR-повідомлення 131. У деяких випадках, RRLP-повідомлення 120, показане у час а, як і раніше може бути у вихідній черзі мережі 70, таким чином MS 10 не приймала RRLP-повідомлення і не запускала RRLP-сеанс. У цьому випадку, інше RR-повідомлення 131 перериває по пріоритету RRLPповідомлення 120 за допомогою його видалення з черги до того, як воно може бути успішне і повністю передане з черги. Внаслідок попереднього прийому за допомогою MS 10 ініціюючої події, такої як перше повідомлення допоміжних даних RRLP (не показано), GPS-механізм вже виконується. Під час кожного подальшого повідомлення GPS-механізм продовжує необривний процес визначення місцеположення. Мережа 70 у час с визначає те, що тільки мінімум часу залишається доти, поки визначення місцеположення не буде необхідним (наприклад, приблизно 4 секунди залишається). Мережа 70 відправляє повідомлення 120В запиту на вимірювання місцеположення по протоколу RRLP в MS 10. Це повідомлення 120В відправляється у час (час с) так, що відповідь приймається своєчасно (у час d). У деяких варіантах здійснення, повідомлення 120В запиту на вимірювання 14 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 місцеположення по протоколу RRLP відправляється з параметрами часу відгуку мережі і точності мережі, але без допоміжних даних. Повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP може містити в собі короткий тайм-аут (наприклад, час відгуку мережі представляє 2 або 4 секунди), протягом якого MS 10 повинна повертати визначення місцеположення, і може містити низьке значення для невизначеності (точність мережі вказує високу точність, наприклад, приблизно 10 метрів). Альтернативно, повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP може містити в собі набір параметрів точності місцеположення, щоб дозволяти велику невизначеність місцеположення (точність мережі вказує низьку точність, наприклад, приблизно 250 метрів). У час d, мережа 70 приймає повідомлення 122 відповіді по вимірюванню місцеположення по протоколу RRLP від MS 10 своєчасно, коли залишається приблизно 0 секунд або майже 0 секунд. Ця своєчасна процедура може бути задіяна, оскільки необхідна повторна відправка внаслідок раніше обірваного RRLP-сеансу. У деяких випадках, обірваний RRLP-сеанс повинен бути сеансом, запущеним за допомогою більш раннього повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP (як показано). У деяких випадках, обірваний RRLP-сеанс повинен бути сеансом, запущеним за допомогою повідомлення 110 допоміжних даних RRLP. У деяких випадках, обірваний RRLP-сеанс може бути сеансом, запущеним або за допомогою більш раннього повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, або за допомогою повідомлення 110 допоміжних даних RRLP. Фіг. 14 показує процес в мережі 70 для своєчасних запитів і відповідей по місцеположенню. На етапі 600, мережа 70 визначає майбутній час, коли повідомлення 122 відповіді по вимірюванню місцеположення по протоколу RRLP необхідне. На етапі 610, мережа 70 встановлюється таймер, розклад і т. п. і чекає до моменту безпосередньо перед тим, як дані про місцеположення необхідні (наприклад, за 4 секунди до цього). Протягом цього часу очікування після останнього RRLP-повідомлення і перед своєчасним повідомленням 120 запиту на вимірювання місцеположення по протоколу RRLP, мережа може відправляти інші RRповідомлення і не обривати процес визначення місцеположення мобільної станції. На етапі 620, мережа 70 відправляє повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Це повідомлення 120 відправляється без допоміжних даних у час, надаючи MS 10 достатню кількість часу для того, щоб реагувати. На етапі 630, мережа 70 приймає повідомлення 122 відповіді по вимірюванню місцеположення по протоколу RRLP безпосередньо перед тим, як місцеположення необхідне. Як згадано вище, цей своєчасний процес може реалізовуватися для всіх повідомлень 120 запиту на вимірювання місцеположення по протоколу RRLP, що передаються за допомогою мережі 70. Очікування, щоб відправляти повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, до моменту безпосередньо перед тим, як визначення місцеположення необхідне (наприклад, при здійсненні повторних запитів), допомагає зменшувати число припинених сеансів і економить смугу пропускання каналу. Альтернативно, цей процес може реалізовуватися, якщо одне або більше припинень і/або переривань по пріоритету сталося в межах поточного обміну даними з цієї MS 10. Альтернативно, цей процес може реалізовуватися, якщо одне або більше припинень або переривань сталося при здійсненні зв'язку з іншими мобільними станціями в цьому стільнику, наприклад, для мобільних станцій, що мають аналогічні приблизні місцеположення MS. Фіг. 15 і 16 показують спосіб затримки (або відкидання) нових RR-повідомлень, щоб ухилятися від припинених сеансів, відповідно до варіантів здійснення даного винаходу. Фіг. 15 показує спосіб мінімізації повторних відправок між мережею 70 і MS 10 в бездротовій мережі. У час а, мережа 10 відправляє повідомлення 100 RRLP-запиту, тим самим відкриваючи сеанс. Повідомлення 100 RRLP-запиту може бути або повідомленням 110 допоміжних даних RRLP, або повідомленням 120 запиту на вимірювання місцеположення по протоколу RRLP. У час b, до того як мережа 10 прийняла відповідь від MS 10, мережа 70 визначає, в той час коли RRLP-сеанс є як і раніше відкритим, що нове RR-повідомлення готове до відправки з мережі 70 в MS 10. У відомих системах мережа 70 відразу відправляє це нове RR-повідомлення, тим самим припиняючи поточний RRLP-сеанс. Згідно з варіантами здійснення даного винаходу, мережа 70 чекає, якщо допустимо, щоб відправляти нові RR-повідомлення, щоб ухилятися від припинення поточного RRLP-сеансу. Таким чином, щоб ухилятися від припинення RRLP-сеансу, мережа 70 втримує нове RR-повідомлення до моменту, поки повідомлення 102 відповіді/підтвердження прийому RRLP не прийняте, тим самим нормально закриваючи RRLPсеанс. На основі конкретного нового RR-повідомлення, мережа 70 може або чекати, щоб відправляти нове RR-повідомлення, або повністю відкидати нове RR-повідомлення. У час с, мережа 70 приймає і розпізнає повідомлення 102 відповіді/підтвердження прийому RRLP. 15 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 Незабаром після цього, у час d, якщо нове RR-повідомлення не відкинуте, мережа 70 відправляє нове RR-повідомлення після того, як RRLP-сеанс закритий, тим самим ухиляючись від припинення RRLP-сеансу. На фіг. 16 на етапі 650, мережа 70 відправляє повідомлення RRLP-запиту. На етапі 660, до того як RRLP-сеанс закритий, мережа 70 визначає те, що вона має нове RR-повідомлення, готове до відправки в MS 10. На етапі 670, мережа 70 визначає те, дозволено чи ні затримувати (або відкидати) відправку нового RR-повідомлення. Якщо не дозволено, мережа 70 відправляє нове RR-повідомлення на етапі 690, тим самим неминуче припиняючи поточний RRLP-сеанс. На етапі 680, мережа 70 чекає і потім приймає повідомлення 102 відповіді/підтвердження прийому RRLP. Якщо нове RR-повідомлення затримане, обробка переходить до етапу 690 перед завершенням обробки. Якщо нове RR-повідомлення відкинуте, немає нового RRповідомлення, що залишається для відправки, і обробка закінчується. Фіг. 17, 18, 19, 20 і 21 ілюструють спосіб зміни параметра точності, щоб балансувати час відгуку і точність при виклику служб екстреної допомоги (ES), відповідно до варіантів здійснення даного винаходу. Фіг. 17 показує приклад обробки послідовності операцій виклику для виклику служб екстреної допомоги (ES), щоб використати підвищену точність, коли час доступний. У час a (t=0), MS 10 ідентифікує виклик ES. У відповідь на ідентифікацію виклику ES, MS 10 запускає GPS-механізм. MS 10 може задавати таймер активності таким, що дорівнює більшому значенню (наприклад, Act_timer = 40 секунд). Одне призначення часу активності полягає в тому, щоб відстежувати активність (або неактивність) з'єднань між мережею 70 і MS 10. Якщо немає активності протягом певного часу, то таймер активності закінчиться, і GPS-механізм вимкнеться. У час b, мережа 70 відправляє перше повідомлення 140 допоміжних даних RRLP. Це перше повідомлення 140 містить опорну інформацію 410 (супутниковий час і приблизне місцеположення 420 MS з фіг. 11). Воно також містить інформацію місцеположення супутників по супутниках, найбільш оптимальних для MS 10. У час с, MS 10 відповідає з повідомленням 142 підтвердження прийому допоміжних даних RRLP. У час d і час e, процес обміну повідомленнями допоміжних даних 144 і повідомленнями підтвердження прийому 146 може повторюватися один або більше разів, щоб відправляти додаткові допоміжні дані (інформацію місцеположення супутників) по супутниках, наступних по оптимальності для MS 10. Потім мережа 70 готує повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP може містити значення для параметра часу відгуку мережі (час відгуку мережі). Цей параметр часу відгуку мережі може бути заданий таким чином, щоб вказувати проміжний час відгуку (наприклад, значення 4 відповідає 16 секундам). Повідомлення 120 також може містити параметр точності мережі. Цей параметр точності мережі може бути заданий так, щоб вказувати проміжну точність або невизначеність (наприклад, значення 19 відповідає 51,2 метрам). Цей параметр і інші параметри відстані або невизначеності або дальностей, описаний в даному документі з конкретними значеннями, і надаються тільки як приклади. Інші значення можуть використовуватися. Значення 51,2 метра або 245,5 метри, наприклад, можуть бути значеннями в рамках 40-60 метрів, 30-70 метрів, 40-100 метрів, 40-400 метрів, 100-150 метрів, 100-250 метрів, 100-300 метрів, 100-400 метрів і т. п., як повинні розуміти фахівці в даній галузі техніки. У час f, мережа 70 відправляє повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. У деяких випадках, останній набір допоміжних даних включають в це повідомлення 120. У інших випадках останній набір допоміжних даних включають в попереднє повідомлення, яке є повідомленням 144 допоміжних даних RRLP. Щоб підвищувати точність, MS 10 може використовувати значення точності, яке представляє невелику або взагалі не представляє невизначеність. Наприклад, параметр Act_Accuracy може задаватися таким, що дорівнює значенню 0, яке представляє 0 метрів невизначеності (найбільше значення точності). Альтернативно, параметр Act_Accuracy може задаватися таким, що дорівнює значенню 1, 2, 3 або 4, щоб представляти невизначеність 1,0, 2,1, 3,3 або 4,6 метри, відповідно. Інші значення, що взагалі не представляють або що представляють невелику невизначеність, також можуть використовуватися. У деяких випадках, де MS 10 активує цей процес підвищеної точності, MS 10 переважно задає параметри Act_Accuracy незалежно від параметра точності мережі, що відправляється за допомогою мережі 70. У інших випадках, де мережа 70 активує процес підвищеної точності, мережа 70 переважно і тимчасово перевизначає свою стандартну точність мережі (наприклад, 51,2 м) і задає параметри, які вона пізніше передає в повідомленні 120 запиту на вимірювання місцеположення по протоколу RRLP рівними значенню точності, яке не представляє невизначеність або представляє невелику невизначеність. 16 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 Також показано, після часу f, що MS 10 скидає свій таймер активності з поточного часу зворотного відліку (наприклад, 20 секунд) до значення, яке співпадає з часом відгуку мережі (Act_timer = час відгуку мережі), наприклад, якщо час, що залишився в поточному таймері активності менший часу відгуку мережі. Таким чином, MS 10 не вимикає передчасно GPSмеханізм до того, як визначення місцеположення на основі вимірювання визначене і передано в мережу 70. MS 10 аналогічно може задавати другий таймер зворотного відліку таким, що дорівнює часу відгуку (Act_timer = час відгуку мережі). Цей таймер може використовуватися за допомогою MS 10 для того, щоб задавати, коли MS 10 відправляє визначене місцеположення. У час g, час, що вийшов, в прикладі становить 36 секунд. MS 10 використала весь виділений час відгуку мережі при визначенні місцеположення. Таким чином, навіть коли точність визначення місцеположення не досягнута, знайдене місцеположення підвищеної точності, що потенційно має більшу точність (або аналогічно, меншу невизначеність), ніж запитано за допомогою стандартної точності мережі (наприклад, 51,2 м). За допомогою зменшення цього параметра невизначеності до 0, MS 10 повинна використати весь допустимий час відгуку мережі при обчисленні місцеположення. За допомогою зменшення параметра невизначеності до невеликого значення (наприклад, 1, 2, 3 або 4), MS 10, найбільш ймовірно, повинна використати весь допустимий час відгуку мережі, якщо тільки місцеположення не може бути визначене з низькою оціненою невизначеністю. Додатковий час, що використовується за допомогою GPS-механізму в спробі отримувати визначення місцеположення із зниженою необхідною невизначеністю, дає можливість MS 10 формувати визначення місцеположення підвищеної точності. У час g, MS 10 відправляє повідомлення 122 відповіді по вимірюванню місцеположення по протоколу RRLP з одним з наступних компонентів: Locationlnfo; GSP-Measurelnfo; або LocationError. Як правило, MS 10 повинна відповідати за допомогою компонента Locationlnfo, коли MS 10 визначає допустиме визначення місцеположення або вичерпує ліміт часу. Альтернативно, MS 10 повинна відповідати за допомогою компонента GSP-Measurelnfo, коли MS 10 інструктується надавати вимірювання в мережу 70, що дає можливість мережі 70 визначати місцеположення на основі цих необроблених даних. Фіг. 18 показує інший варіант здійснення обробки послідовності операцій виклику для виклику служб екстреної допомоги (ES). У цьому сценарії, повідомлення запиту місцеположення передаються своєчасно для MS 10, щоб відповідати з відповіддю по місцеположенню у увімкненому стані. Послідовність операцій починається, як описано вище з посиланням на фіг. 17. У час a (t=0), MS 10 ідентифікує виклик ES, потім у відповідь запускає GPS-механізм. З іншого боку, таймер зворотного відліку активності задається (Act_timer=40 секунд). У час b, мережа 70 відправляє перше повідомлення 140 допоміжних даних RRLP. У час с, MS 10 відповідає з повідомленням 142 допоміжних даних RRLP. Процес може продовжуватися, щоб передавати декілька наборів 140/142 повідомлень. У час d, цей сценарій відступає від раніше описаного сценарію. У час d, мережа 70 має інформацію, що вона повинна відправляти повідомлення запиту місцеположення (повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP), проте, мережа 70 чекає, щоб відправляти повідомлення, до попередньо визначеного часу до того, як мережа 70 повинна виконувати визначення місцеположення. Стандартна точність мережі може бути задана так, щоб надавати достатню точність (точність мережі=19, що представляє 51,2 метри), проте, час відгуку мережі радикально скорочується. Наприклад, час відгуку мережі може бути заданий таким, що дорівнює 2 (представляючи 4 секунди) або 1 (представляючи 2 секунди) замість надання для MS 10 десятків секунд. Це радикально скорочений час звичайно не дає можливості мобільній станції визначати місцеположення. Звичайно, мобільна станція вимагає від десятків секунд до декількох хвилин. Тут, оскільки MS 10 почала свій процес визначення місцеположення рано (наприклад, у час а), вона вже працювала над своїм місцеположенням протягом десятків секунд. Так само, мережа 70 готує повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. Повідомлення 120 містить радикально скорочений час відгуку мережі (наприклад, час відгуку мережі = 4 секунди) і точність мережі (наприклад, точність мережі = 51,2 метра). У час є, час, який вийшов, в прикладі становить 32 секунди, і мережа 70 відправляє повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. У цьому випадку, останній набір допоміжних даних включається в попереднє повідомлення (тобто останнє повідомлення 140 допоміжних даних RRLP), отже, ці повідомлення 120 відправляють без допоміжних даних. У деяких випадках, точність, що використовується за допомогою MS 10, задається рівною значенню, що представляє низьку точність або, еквівалентно, високу невизначеність 17 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 (наприклад, значення 34 представляє 245,5 метрів), яке може бути попередньо визначеним значенням або попередньо визначеним конфігурованим значенням. Це значення точності, що представляє низьку точність, може бути задане одним з двох способів: за допомогою мережі 70, або за допомогою MS 10. Якщо значення точності задається за допомогою мережі 70, мережа 70 відправляє повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP з точністю мережі, заданою таким чином, щоб представляти це низьке значення точності (точність мережі). Наприклад, мережа 70 може тимчасово перезаписувати стандартну точність мережі за допомогою низького значення точності для цієї MS 10. З іншого боку, якщо точність задається за допомогою MS 10, мережа 70 може відправляти повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP з точністю мережі, заданою так, щоб представляти стандартну точність мережі. MS 10 перезаписує або ігнорує точність мережі, що приймається, і використовує замість цього значення, що представляє низьку точність. MS 10 використовує час відгуку мережі як для свого внутрішнього таймера зворотного відліку, так і для свого таймера часу відгуку (тобто Act_timer = час відгуку мережі і Act_RT = час відгуку мережі, відповідно). У час f, як тільки таймер часу відгуку дорівнює нулю (час, який вийшов, в прикладі становить 36 секунд), MS 10 готує і відправляє повідомлення 122 відповіді по вимірюванню місцеположення по протоколу RRLP. Цей сценарій має декілька переваг. Оскільки MS 10 запустила GPS-механізм рано (у час а), то використала максимальну можливу тривалість часу при визначенні місцеположення при одночасній мінімізації втрати енергії акумулятора і сформувала вдосконалене визначення місцеположення. Оскільки повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP є коротким (оскільки воно не містить допоміжних даних), імовірність того, що повідомлення 120 може уриватися по пріоритету, знижується. Оскільки час відгуку мережі є низьким (наприклад, 4 секунди), імовірність припинення кінцевого RRLP-сеансу іншими RRповідомленнями знижується. Якщо знижене значення точності (наприклад, Act_Accuracy = 245,5 метрів) підставлене замість стандартної точності мережі (наприклад, точність мережі = 51,2 метра), імовірність припинення кінцевого RRLP-сеансу іншими RR-повідомленнями додатково знижується. Фіг. 19 показує ще один варіант здійснення обробки послідовності операцій виклику для виклику служб екстреної допомоги (ES). У цьому сценарії, перше повідомлення 120 запиту місцеположення (з або без допоміжних даних) передається тільки після кінцевого повідомлення 142 допоміжних даних RRLP. Якщо цей RRLP-сеанс обривається, мережа 70 затримує відправку повторного повідомлення 120А запиту місцеположення (повідомлення без допоміжних даних) до попередньо визначеного часу на основі того, коли визначення місцеположення необхідне. Інакше, події і послідовність повідомлень від часу а до часу f є ідентичними описаним вище з посиланням на фіг. 17, і їх опис не повторюється. Послідовність відхиляється від фіг. 17, у час g, де додаткове RR-повідомлення 130 примушує поточний RRLP-сеанс припинитися. Еквівалентно, повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, можливо, перерване по пріоритету внутрішньо у вихідній черзі мережі (наприклад, оскільки повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP є довгим, оскільки воно містить допоміжні дані). У будь-якому випадку, MS 10 не має в даний момент відкритого RRLP-сеансу або інструкції, щоб відповідати з місцеположенням. Мережа 70 затримує відправку повторного повідомлення 120А до часу, обчисленого, щоб давати MS 10 достатньо часу для того, щоб відповідати з визначенням місцеположення, так що визначення місцеположення приймається своєчасно для мережі 70 так, щоб повідомляти звіт про нього. На основі більш раннього припинення або переривання по пріоритету сеансу RRLP, мережа 70 може визначати перемикатися з першого режиму на другий режим. У першому режимі мережа 70 виконує повторну відправку на основі передчасно зупиненого RRLP-сеансу і відправляє повторне повідомлення запиту місцеположення, відразу як воно стає відомим. Таким чином, мережа 70 базує час відправки наступного повідомлення запиту місцеположення на минулій події, а саме, виконанні додаткового RR-повідомлення і необхідності повторно відправляти повідомлення запиту місцеположення максимально швидко. У цьому другому режимі мережа 70 відразу не відправляє повторне повідомлення запиту місцеположення. Замість цього, мережа 70 переважно чекає протягом певного часу на основі того, коли відповідь по місцеположенню необхідна. Таким чином, замість базування часу відправки повторного повідомлення запиту місцеположення на минулій події, передача базується на майбутній події. Наприклад, час відправки наступного запиту місцеположення 18 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 60 базується на тому, коли визначення місцеположення необхідне (наприклад, на основі часу відгуку мережі, що залишився). Час, коли повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP передається, може бути основане на попередньо визначеному часі до того часу, коли визначення місцеположення необхідне в мережі 70. У показаному прикладі, попередньо визначений час задається таким, що дорівнює 8 секундам (час відгуку мережі = 3) до того, як інформація місцеположення необхідне за допомогою мережі 70. Інші попередньо визначені часи можуть використовуватися, наприклад, на основі емпіричних даних різних мобільних станцій, інші попередньо визначені часи можуть використовуватися (наприклад, час відгуку мережі може бути заданий таким, що дорівнює 1, 2, 4, 8 або 16 секунд). Мережа 70 може встановлювати таймер або диспетчеризувати повідомлення запиту вимірювання так, що повідомлення передається в цей майбутній час. У час h (t=32), мережа 70 закінчує затримку і передає повторне повідомлення 120А запиту на вимірювання місцеположення по протоколу RRLP. Як указано, повідомлення не містить допоміжних даних. Альтернативно, затримка у відправці повторного повідомлення 120А запиту на вимірювання місцеположення по протоколу RRLP може бути трохи скорочена, час відгуку (час відгуку мережі) може бути трохи збільшений, і повідомлення 120А може містити деякі допоміжні дані. Крім того, параметр точності, що використовується за допомогою MS 10, може бути заданий таким, що дорівнює більшому значенню невизначеності (наприклад, 245,5 метри) або за допомогою перезапису за допомогою MS 10 стандартного значення мережі, або за допомогою мережі 70 як тимчасове значення невизначеності. MS 10 скидає свій таймер активності до часу відгуку мережі (Act_timer = час відгуку мережі). У цьому прикладі, таймер активності мобільного абонента задається так, щоб закінчуватися через 4 секунди (Act_timer=4 секунди), але цей таймер скидається на основі часу, що приймається (зміна Act_timer = часвідгуку мережі = 8 секунд). MS 10 може задавати свій час відгуку таким, що дорівнює часу відгуку мережі (Act_RT = час відгуку мережі = 8 секунд). У час і (t=36), MS 10 повідомляє звіт про визначеного місцеположення з повідомленням 122 відповіді по вимірюванню місцеположення по протоколу RRLP, потім вимикає GPS-механізм. Фіг. 20 показує сценарій, де мережа 70 передає своєчасне повідомлення запиту вимірювання, але більш раннє повторне повідомлення допоміжних даних інструктує MS 10 використати точність мережі. Події і повідомлення у час від а до d ідентичні повідомленням по фіг. 19. У час e, сеанс припиняється з додатковим RR-повідомленням 144. Аналогічно, мережа може мати перерваний по пріоритету перехід повідомлень 144. У час f і g, допоміжні дані відправляються як повторне повідомлення 144А допоміжних даних RRLP, і їх прийом підтверджується за допомогою повідомлення 146 підтвердження прийому допоміжних даних RRLP. Повторне повідомлення може бути повторною відправкою першого повідомлення допоміжних даних (не показано), другим повідомленням допоміжних даних (як показано) або будь-яким іншим з сегментованої послідовності повідомлень допоміжних даних (не показані). У час h (t=20), мережа 70 відправляє повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP для своєчасного прийому повідомлення звіту про вимірювання, як описано вище. MS 10 може задавати свій таймер активності таким, що дорівнює часу відгуку мережі (Act_timer = час відгуку мережі = 16 секунд), може задавати свій таймер відгуку таким, що дорівнює часу відгуку мережі (Act_RT = час відгуку мережі = 16 секунд) і може задавати свою точність рівною точності мережі (Act_Accuracy = точність мережі = 51,2 метра). У попередніх прикладах, MS 10 звичайно використовує значення точності, яке є тимчасовим значенням. Це тимчасове значення є іншим значенням, яке більше або менше стандартної точності мережі. У цьому прикладі, стандартна точність мережі використовується як виключення використанню іншого значення. На завершення, у час і (t=36), MS 10 повідомляє звіт про певне вимірювання в повідомленнях 122 відповіді по вимірюванню місцеположення по протоколу RRLP. У деяких випадках, мережа 70 може виявляти подію повторної відправки (внаслідок припинення або переривання по пріоритету). У цьому випадку, мережа 70 модифікує точність мережі від тимчасового значення до стандартної точності мережі. Альтернативно, MS 10 може виявляти подію повторного повідомлення допоміжних даних (внаслідок припинення), і на основі цієї події MS модифікує свою точність із значення. Альтернативно, MS може визначати те, що повідомлення запиту вимірювання, що приймається, затримується на основі виміряної тривалості часу від попереднього RRLP-повідомлення. Фіг. 21 показує блок-схему послідовності операцій способу, що стосується модифікації параметра точності від стандартної точності мережі, як описано з посиланням на попередні 19 UA 97857 C2 5 10 15 20 25 30 35 40 45 50 55 чотири креслення. На етапі 700, після того як MS 10 прийняла повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP, виконується визначення відносно того, відправлено і прийнято повідомлення 120 вчасно чи ні. Це визначення може здійснюватися за допомогою MS 10 або мережі 70 на основі часу (наприклад, деякого очікуваного часу зв'язку), на основі припинень або на основі переривань по пріоритету, як описано вище. Якщо повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP відправлене вчасно, обробка продовжується на етапі 710. На етапі 710, MS 10 використовує точність, що перевищує звичайну точність (наприклад, 0 метрів), для максимальної точності або вибране невелике значення, менше стандартної точності мережі (наприклад, значення 1-10 метрів або значення від 0 метрів до стандартного значення точності мережі), для більш точної відповіді. Якщо повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP затримується, точність може бути задана рівною стандартній точності мережі (не показана). Альтернативно, якщо повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP затримується, обробка продовжується на етапі 720. Інший тест може виконуватися на етапі 720, щоб визначати те, затримане повідомлення 120 трохи або дуже значно. Наприклад, повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP може бути визначене як трохи затримане, якщо повторна відправка повідомлення допоміжних даних виконана. Повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP може бути визначене як значно затримане, якщо повторна відправка попереднього повідомлення запиту на вимірювання місцеположення по протоколу RRLP виконана. Альтернативно, повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP може бути визначене як трохи затримане, якщо воно передається пізніше, ніж в перший попередньо визначений час (наприклад, 24 секунди), але перед другим попередньо визначеним часом (наприклад, 36 секунд). Повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP може бути визначене як значно затримане, якщо передається пізніше, ніж у другий попередньо визначений час. На етапі 730, MS 10 використовує стандартну точність мережі (тобто точність мережі). На етапі 740, MS 10 використовує більш низьке значення точності (наприклад, 100, 200 або 250 метрів), щоб прискорювати свою відповідь по місцеположенню. Фіг. 22 показує блок-схему послідовності повідомлень для послуги доданого значення (VAS), відповідно до варіантів здійснення даного винаходу. Для VAS, MS 10 не обов'язково повинна використати весь час відгуку мережі. У час a (t=0), мережа 70 визначає те, що VAS ініційована. У відповідь, вона відправляє повідомлення 140 допоміжних даних RRLP. MS 10, при прийомі повідомлення 140 допоміжних даних RRLP, запускає свій GPS-механізм і задає свій таймер активності таким, що дорівнює попередньо визначеному значенню (більшому значенню, ніж використовується у разі виклику ES, наприклад, Act_timer = 45 секунд). Також у відповідь на прийом повідомлення 140 допоміжних даних RRLP, MS 10 відправляє, у час b, повідомлення 142 підтвердження прийому допоміжних даних RRLP. У час с і d, додаткові сегменти допоміжних даних можуть передаватися, а їх прийом підтверджуватися з додатковими парами повідомлень 144 допоміжних даних RRLP і повідомлень 146 підтвердження прийому допоміжних даних RRLP. У час e (t=20, Act_timer = 25), мережа 70 готує повідомлення запиту на вимірювання місцеположення по протоколу RRLP зі стандартним часом мережі (наприклад, час відгуку мережі = 16 секунд) і стандартним значенням точності мережі (наприклад, точність мережі = 51,2 метра). Мережа 70 відправляє, і MS 10 приймає повідомлення 120 запиту на вимірювання місцеположення по протоколу RRLP. На відміну від виклику ES, MS 10 не відкидає мережеві параметри. MS 10 задає свій таймер активності, активний таймер відгуку і параметри точності активності рівними значенням мережі (тобто Act_timer = час відгуку мережі, Act_RT = час відгуку мережі, і Act_Accuracy = точність мережі, відповідно). У час f (t=34, Act_timer = 2), MS 10 відправляє своє визначене місцеположення в повідомленні 122 відповіді по вимірюванню місцеположення по протоколу RRLP в мережу 70. У цьому випадку, MS відправляє визначене місцеположення до закінчення часу відгуку мережі, внаслідок того, що невизначеність місцеположення менша необхідної точності мережі. На завершення, у відповідь на повідомлення звіту про визначене місцеположення, MS 10 вимикає GPS-механізм. Потрібно розуміти, що винахід може здійснюватися на практиці з модифікаціями і змінами в рамках суті і об'єму прикладеної формули винаходу. Опис не має намір бути вичерпним або обмежувати винахід точною розкритою формою. Потрібно розуміти, що винахід може здійснюватися на практиці з модифікаціями і змінами. 60 20 UA 97857 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 50 55 1. Спосіб зменшення числа повторних повідомлень запиту на визначення місцеположення між мережею і мобільною станцією в бездротовій мережі, спосіб містить: - очікування до попередньо визначеного часу, причому попередньо визначений час оснований на часі, коли дані про місцеположення необхідно використовувати; - передачу, в попередньо визначений час, повідомлення запиту на визначення місцеположення, що містить час відгуку мережі і точність мережі; і - прийом, у час до того, як дані про місцеположення необхідно використовувати, повідомлення відповіді по визначенню місцеположення, що містить дані про місцеположення. 2. Спосіб за п. 1, в якому час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд. 3. Спосіб за п. 1, в якому точність мережі містить значення, що представляє низьку точність не менше 100 метрів. 4. Спосіб за п. 1, в якому запит на визначення місцеположення не містить допоміжних даних. 5. Спосіб за п. 1, який додатково включає: - передачу повідомлення допоміжних даних; і - прийом повідомлення підтвердження прийому допоміжних даних. 6. Спосіб за п. 1, в якому повідомлення запиту на визначення місцеположення містить повідомлення запиту на визначення місцеположення по протоколу визначення місцеположення. 7. Спосіб за п. 1, в якому повідомлення відповіді по визначенню місцеположення містить повідомлення відповіді по визначенню місцеположення по протоколу визначення місцеположення. 8. Спосіб зменшення числа повторних повідомлень запиту на визначення місцеположення між мережею і мобільною станцією в бездротовій мережі, спосіб включає етапи, на яких: - передають повідомлення допоміжних даних протоколу визначення місцеположення; - приймають повідомлення підтвердження прийому допоміжних даних протоколу визначення місцеположення; - очікують до попередньо визначеного часу, причому попередньо визначений час оснований на часі, коли необхідно використовувати дані про місцеположення; - передають, в попередньо визначений час, повідомлення запиту на визначення місцеположення по протоколу визначення місцеположення, що містить час відгуку мережі і точність мережі, причому час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд, причому точність мережі містить значення, що представляє низьку точність не менше 100 метрів, і причому повідомлення запиту на визначення місцеположення по протоколу визначення місцеположення не містить допоміжних даних; і - приймають, у час до того, як дані місцеположення необхідно використовувати, повідомлення відповіді по визначенню місцеположення по протоколу визначення місцеположення, що містить дані про місцеположення. 9. Мережа для зменшення числа повторних повідомлень запиту на визначення місцеположення між мережею і мобільною станцією в бездротовій мережі, мережа містить: - таймер, щоб очікувати до попередньо визначеного часу, причому попередньо визначений час оснований на часі, коли необхідно використовувати дані про місцеположення; - передавальний пристрій, щоб передавати, в попередньо визначений час, повідомлення запиту на визначення місцеположення, що містить час відгуку мережі і точність мережі; і - приймальний пристрій, щоб приймати, у час до того, як дані про місцеположення необхідно використовувати, повідомлення відповіді по визначенню місцеположення, що містить дані про місцеположення. 10. Мережа за п. 9, в якій час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд. 11. Мережа за п. 9, в якій точність мережі містить значення, що представляє низьку точність не менше 100 метрів. 12. Мережа за п. 9, в якій запит на визначення місцеположення не містить допоміжних даних. 13. Мережа за п. 9, в якій повідомлення запиту на визначення місцеположення містить повідомлення запиту на визначення місцеположення по протоколу визначення місцеположення. 14. Мережа за п. 9, в якій повідомлення відповіді по визначенню місцеположення містить повідомлення відповіді по визначенню місцеположення по протоколу визначення місцеположення. 15. Машиночитаний продукт, який містить машиночитаний носій, що містить: 21 UA 97857 C2 5 10 15 20 25 - код, щоб примусити щонайменше один комп'ютер чекати до попередньо визначеного часу, причому попередньо визначений час оснований на часі, коли необхідно використовувати дані про місцеположення; - код, щоб примусити щонайменше один комп'ютер передавати, в попередньо визначений час, повідомлення запиту на визначення місцеположення, що містить час відгуку мережі і точність мережі; і - код, щоб примусити щонайменше один комп'ютер приймати, у час до того, як дані про місцеположення необхідно використовувати, повідомлення відповіді по визначенню місцеположення, що містить дані про місцеположення. 16. Машиночитаний продукт за п. 15, в якому час відгуку мережі містить значення, що представляє скорочений час відгуку не більше 4 секунд. 17. Машиночитаний продукт за п. 15, в якому точність мережі містить значення, що представляє низьку точність не менше 100 метрів. 18. Машиночитаний продукт за п. 15, в якому запит на визначення місцеположення не містить допоміжних даних. 19. Машиночитаний продукт за п. 15, в якому машиночитаний носій додатково містить: - код, щоб примусити щонайменше один комп'ютер передавати повідомлення допоміжних даних; і - код, щоб примусити щонайменше один комп'ютер приймати повідомлення підтвердження прийому допоміжних даних. 20. Машиночитаний продукт за п. 15, в якому повідомлення запиту на визначення місцеположення містить повідомлення запиту на визначення місцеположення по протоколу визначення місцеположення. 21. Машиночитаний продукт за п. 15, в якому повідомлення відповіді по визначенню місцеположення містить повідомлення відповіді по визначенню місцеположення по протоколу визначення місцеположення. 22 UA 97857 C2 23 UA 97857 C2 24 UA 97857 C2 25 UA 97857 C2 26 UA 97857 C2 27 UA 97857 C2 28
ДивитисяДодаткова інформація
Назва патенту англійськоюDelayed radio resource signaling in a mobile radio network
Автори англійськоюBurroughs, Kirk, Allan, Rowland, Thomas K., Deloach JR., James Douglass
Назва патенту російськоюЗадержанная сигнализация радиоресурсов в мобильной радиосети
Автори російськоюБарроз Кирк Аллан, Роуланд Томас К., Делоч мл., Джеймс Дуглас
МПК / Мітки
МПК: G01S 5/14
Мітки: мобільній, радіомережі, радіоресурсів, затримана, сигналізація
Код посилання
<a href="https://ua.patents.su/38-97857-zatrimana-signalizaciya-radioresursiv-v-mobilnijj-radiomerezhi.html" target="_blank" rel="follow" title="База патентів України">Затримана сигналізація радіоресурсів в мобільній радіомережі</a>
Спосіб пакетної передачі даних в мобільній радіомережі
Номер патенту: 41979
Опубліковано: 15.10.2001
Автори: Бергманн Ансгар, Перніце Фріедер
МПК: H04L 12/56, H04Q 7/00, H04J 3/00
Мітки: пакетної, мобільній, спосіб, даних, передачі, радіомережі
Формула / Реферат:
1. Способ пакетной передачи данных в мобильной радиосети, выполненной в виде переключающейся сети, содержащей мобильные станции и базовые станции. отличающийся тем, что при установлении, радиосвязи для пакетной передачи данных участвующей в сеансе связи мобильной станции выделяют канал связи и идентификационный номер, обозначающий пакетный вид данных, а также тем, что передачу отдельных пакетов данных осуществляют в выделенных каналах связи,...
Спосіб прийняття рішення про перемикання мобільних абонентів в мобільній радіомережі
Номер патенту: 32413
Опубліковано: 15.12.2000
Автори: Іванов Коля, Шульц Егон
Мітки: абонентів, рішення, перемикання, радіомережі, прийняття, спосіб, мобільній, мобільних
Текст:
...Способ по одному из пп. 1-Э, отличающийся тем, что устанавливаемый временной интервал образует меру для ожидаемого в соответствии со скоростью транспортного средства времени пребывания мобильной станции в микроячейке. Изобретение относится к способу принятия решения о переключении (Handover) мобильных абонентов в мобильной радиосети с множеством базовых станций в пространственном расположении по типу ячеистой системы в иерархической ячеистой...
Спосіб прийняття рішення про перемикання мобільних абонентів в мобільній радіомережі
Номер патенту: 32414
Опубліковано: 15.12.2000
Автори: Іванов Коля, Шульц Егон
Мітки: спосіб, прийняття, радіомережі, рішення, мобільних, абонентів, перемикання, мобільній
Текст:
...несущественно , как знак медленного движения мобильной станции 2 Способ по п 1 о тлича ющий ся тем , что зап рет дпя предстояще го переключения в микроя чейку соо тве тствующей мобильной станции о т меня ют и таймер устана вли вают в и схо дное положение,.если процесс ре шения переключе ния устано ви т, что мобильная стан ция покин у ла область радиоо бслужи вания микроячейки 3 Способ по п 2 . о тли ча ющий ся тем, что тай мер зап ускают...
Спосіб надання радіоресурсів радіостанціям
Номер патенту: 88291
Опубліковано: 12.10.2009
Автор: Лі Хуі
МПК: H04W 72/00, H04L 12/28
Мітки: спосіб, надання, радіостанціям, радіоресурсів
Формула / Реферат:
1. Спосіб надання радіоресурсів радіостанціям (АР, N1, N2, MS1, MS2) системи радіозв’язку, причому у системі радіозв’язку передачу повідомлень між радіостанціями (АР, MS2) здійснюють шляхом ретрансляції цих повідомлень через інші радіостанції (N1, N2), радіостанціям (АР, N1, N2, MS1, MS2) присвоюють класи з точки зору їх функції при передачі повідомлень, радіоустановкою (BS) здійснюють прийом від радіостанцій (АР, N1, N2, MS1, MS2)...
Спосіб голосового управління відеотелефоном радіомережі
Номер патенту: 50009
Опубліковано: 25.05.2010
Автори: Гриценко Володимир Ілліч, Рябов Олексій Петрович, Тертичний Григорій Миколайович, Стасевич Петро Анатолійович, Павлов Олег Ігоревич, Вінцюк Тарас Климович
МПК: G10L 15/00
Мітки: відеотелефоном, спосіб, голосового, управління, радіомережі
Формула / Реферат:
Спосіб голосового управління відеотелефоном радіомережі, що включає обробку радіосигналів, який відрізняється тим, що звуковий сигнал, перетворений до цифрової форми, розпізнають за алгоритмом автоматичного розпізнавання звукових сигналів, порівнюють з еталонними сигналами команд і в залежності від результату розпізнавання відмовляють від розпізнавання або генерують сигнал керування функціями та режимами.
Попередній патент: Полюсний блок перемикального пристрою середньої напруги
Наступний патент: Пристрій і спосіб підвищення місткості для бездротового зв’язку (варіанти)
Випадковий патент: Вітроелектричний агрегат кударевків