Рульове керування по положенню з постійною чутливістю до керуючого впливу
Номер патенту: 102573
Опубліковано: 10.11.2015
Автори: Бондар Андрій Миколайович, Петров Віктор Олексійович, Кашкарьов Антон Олександрович

Формула / Реферат
Рульове керування по положенню з постійною чутливістюдо керуючого впливу, що містить рульовий вал, безконтактний багатополюсний високомоментний двигун, датчик моменту, електронний контролер та датчик положення ротора, яке відрізняється тим, що воно додатково оснащене датчиком положення транспортного засобу (гіроскопом), сигнал з якого подається на формувач керуючого впливу.
Текст
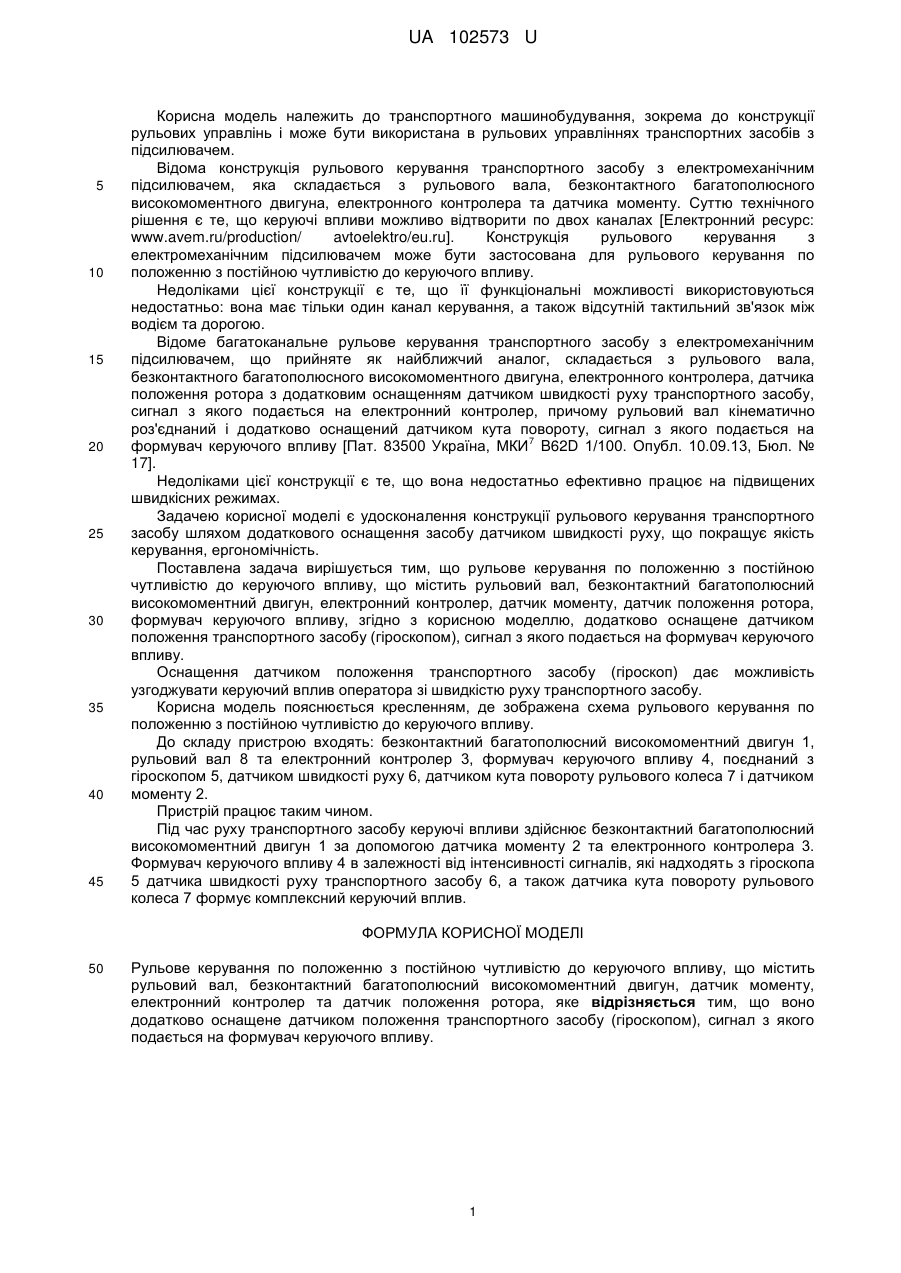
Реферат: Рульове керування по положенню з постійною чутливістю до керуючого впливу містить рульовий вал, безконтактний багатополюсний високомоментний двигун, датчик моменту, електронний контролер та датчик положення ротора. Рульове керування додатково оснащене датчиком положення транспортного засобу (гіроскопом), сигнал з якого подається на формувач керуючого впливу. UA 102573 U (54) РУЛЬОВЕ КЕРУВАННЯ ПО ПОЛОЖЕННЮ З ПОСТІЙНОЮ ЧУТЛИВІСТЮ ДО КЕРУЮЧОГО ВПЛИВУ UA 102573 U UA 102573 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до транспортного машинобудування, зокрема до конструкції рульових управлінь і може бути використана в рульових управліннях транспортних засобів з підсилювачем. Відома конструкція рульового керування транспортного засобу з електромеханічним підсилювачем, яка складається з рульового вала, безконтактного багатополюсного високомоментного двигуна, електронного контролера та датчика моменту. Суттю технічного рішення є те, що керуючі впливи можливо відтворити по двох каналах [Електронний ресурс: www.avem.ru/production/ avtoelektro/eu.ru]. Конструкція рульового керування з електромеханічним підсилювачем може бути застосована для рульового керування по положенню з постійною чутливістю до керуючого впливу. Недоліками цієї конструкції є те, що її функціональні можливості використовуються недостатньо: вона має тільки один канал керування, а також відсутній тактильний зв'язок між водієм та дорогою. Відоме багатоканальне рульове керування транспортного засобу з електромеханічним підсилювачем, що прийняте як найближчий аналог, складається з рульового вала, безконтактного багатополюсного високомоментного двигуна, електронного контролера, датчика положення ротора з додатковим оснащенням датчиком швидкості руху транспортного засобу, сигнал з якого подається на електронний контролер, причому рульовий вал кінематично роз'єднаний і додатково оснащений датчиком кута повороту, сигнал з якого подається на 7 формувач керуючого впливу [Пат. 83500 Україна, МКИ B62D 1/100. Опубл. 10.09.13, Бюл. № 17]. Недоліками цієї конструкції є те, що вона недостатньо ефективно працює на підвищених швидкісних режимах. Задачею корисної моделі є удосконалення конструкції рульового керування транспортного засобу шляхом додаткового оснащення засобу датчиком швидкості руху, що покращує якість керування, ергономічність. Поставлена задача вирішується тим, що рульове керування по положенню з постійною чутливістю до керуючого впливу, що містить рульовий вал, безконтактний багатополюсний високомоментний двигун, електронний контролер, датчик моменту, датчик положення ротора, формувач керуючого впливу, згідно з корисною моделлю, додатково оснащене датчиком положення транспортного засобу (гіроскопом), сигнал з якого подається на формувач керуючого впливу. Оснащення датчиком положення транспортного засобу (гіроскоп) дає можливість узгоджувати керуючий вплив оператора зі швидкістю руху транспортного засобу. Корисна модель пояснюється кресленням, де зображена схема рульового керування по положенню з постійною чутливістю до керуючого впливу. До складу пристрою входять: безконтактний багатополюсний високомоментний двигун 1, рульовий вал 8 та електронний контролер 3, формувач керуючого впливу 4, поєднаний з гіроскопом 5, датчиком швидкості руху 6, датчиком кута повороту рульового колеса 7 і датчиком моменту 2. Пристрій працює таким чином. Під час руху транспортного засобу керуючі впливи здійснює безконтактний багатополюсний високомоментний двигун 1 за допомогою датчика моменту 2 та електронного контролера 3. Формувач керуючого впливу 4 в залежності від інтенсивності сигналів, які надходять з гіроскопа 5 датчика швидкості руху транспортного засобу 6, а також датчика кута повороту рульового колеса 7 формує комплексний керуючий вплив. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Рульове керування по положенню з постійною чутливістю до керуючого впливу, що містить рульовий вал, безконтактний багатополюсний високомоментний двигун, датчик моменту, електронний контролер та датчик положення ротора, яке відрізняється тим, що воно додатково оснащене датчиком положення транспортного засобу (гіроскопом), сигнал з якого подається на формувач керуючого впливу. 1 UA 102573 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSteering by position with constant sensibility to control action
Автори англійськоюBondar Andrii Mykolaiovych, Petrov Viktor Oleksiiovych, Kashkariov Anton Oleksandrovych
Назва патенту російськоюРулевое управление по положению с постоянной чувствительностью к управляющему воздействию
Автори російськоюБондарь Андрей Николаевич, Петров Виктор Алексеевич, Кашкарев Антон Александрович
МПК / Мітки
Мітки: чутливістю, керуючого, керування, постійною, рульове, впливу, положенню
Код посилання
<a href="https://ua.patents.su/4-102573-rulove-keruvannya-po-polozhennyu-z-postijjnoyu-chutlivistyu-do-keruyuchogo-vplivu.html" target="_blank" rel="follow" title="База патентів України">Рульове керування по положенню з постійною чутливістю до керуючого впливу</a>
Багатоканальне рульове керування транспортного засобу по положенню з елетромеханічним підсилювачем руля з тактильними властивостями
Номер патенту: 93858
Опубліковано: 27.10.2014
Автори: Петров Андрій Вікторович, Бондар Андрій Миколайович, Петров Віктор Олексійович, Дідур Володимир Аксентійович
МПК: B62D 1/00
Мітки: тактильними, елетромеханічним, руля, рульове, властивостями, підсилювачем, багатоканальне, транспортного, засобу, керування, положенню
Формула / Реферат:
Багатоканальне рульове керування транспортного засобу по положенню з електромеханічним підсилювачем руля з тактильними властивостями, що містить рульовий вал, поєднаний з багатополюсним високомоментний двигуном, електронний контролер, датчик моменту та датчик положення ротора, яке відрізняється тим, що воно додатково оснащене датчиком положення транспортного засобу (гіроскопом).
Багатоканальне рульове керування транспортного засобу по положенню з електромеханічним підсилювачем руля
Номер патенту: 83500
Опубліковано: 10.09.2013
Автори: Петров Віктор Олексійович, Новік Олексій Юрійович, Петров Андрій Вікторович, Дідур Володимир Аксентійович, Бондар Андрій Миколайович
МПК: B62D 1/00
Мітки: руля, багатоканальне, електромеханічним, підсилювачем, рульове, положенню, керування, засобу, транспортного
Формула / Реферат:
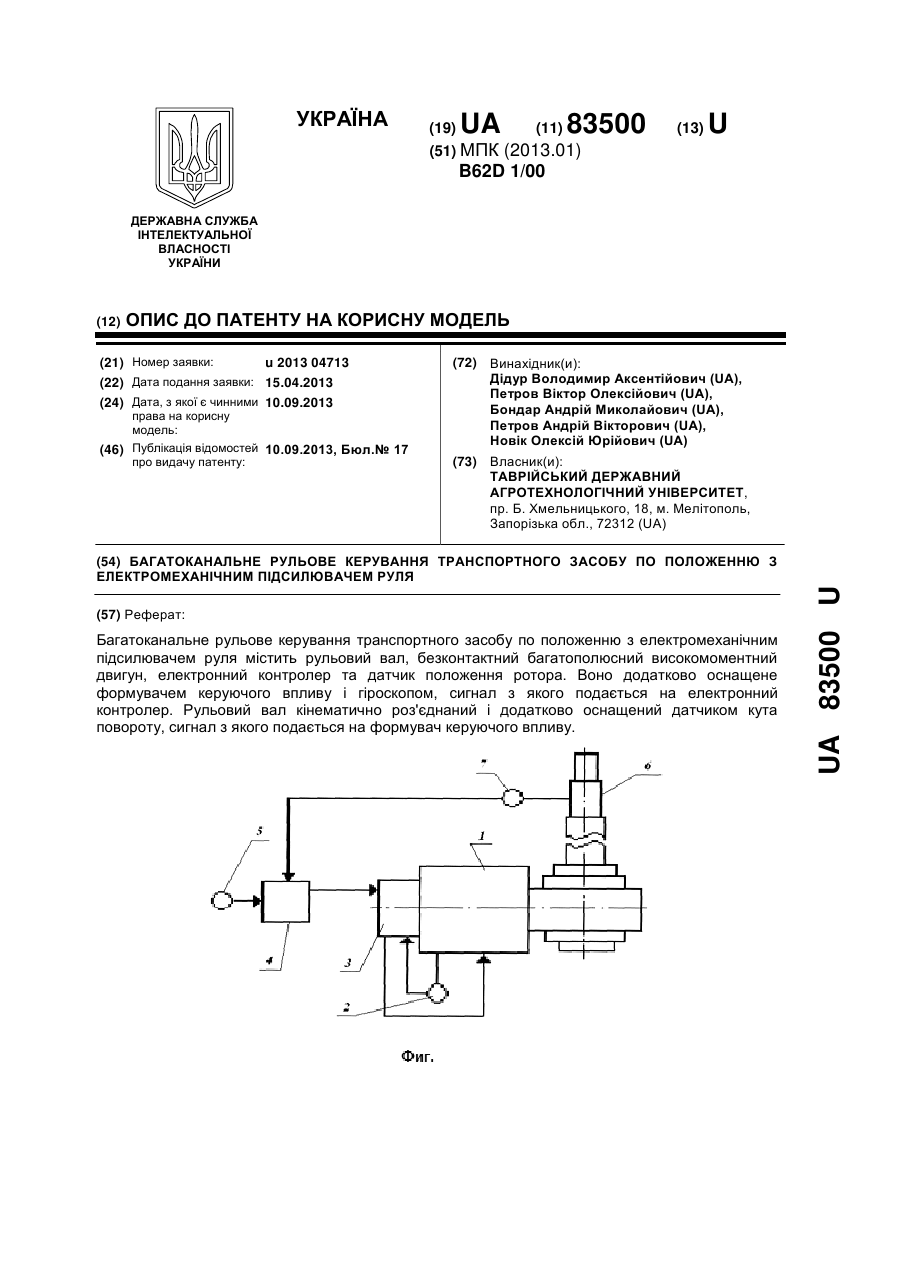
Багатоканальне рульове керування транспортного засобу по положенню з електромеханічним підсилювачем руля, що містить рульовий вал, безконтактний багатополюсний високомоментний двигун, електронний контролер та датчик положення ротора, яке відрізняється тим, що воно додатково оснащене формувачем керуючого впливу і гіроскопом, сигнал з якого подається на електронний контролер, причому рульовий вал кінематично роз'єднаний і додатково оснащений...
Багатоканальне рульове керування транспортного засобу постійної чутливості з електромеханічним підсилювачем руля

Номер патенту: 83501
Опубліковано: 10.09.2013
Автори: Дідур Володимир Аксентійович, Петров Андрій Вікторович, Петров Віктор Олексійович, Бондар Андрій Миколайович
МПК: B62D 1/00
Мітки: транспортного, чутливості, постійної, керування, засобу, руля, багатоканальне, підсилювачем, електромеханічним, рульове
Формула / Реферат:
Багатоканальне рульове керування транспортного засобу постійної чутливості з електромеханічним підсилювачем руля, що містить рульовий вал, безконтактний багатополюсний високомоментний двигун, електронний контролер та датчик положення ротора, яке відрізняється тим, що воно додатково оснащене формувачем керуючого впливу і датчиком швидкості руху транспортного засобу, сигнал з якого подається на електронний контролер, причому рульовий вал...
Багатоканальне рульове керування з електромеханічним підсилювачем руля
Номер патенту: 75948
Опубліковано: 25.12.2012
Автори: Петров Віктор Олексійович, Дідур Володимир Аксентійович, Петров Андрій Вікторович, Бондар Анатолій Миколайович
МПК: B62D 1/00
Мітки: керування, підсилювачем, електромеханічним, руля, багатоканальне, рульове
Формула / Реферат:
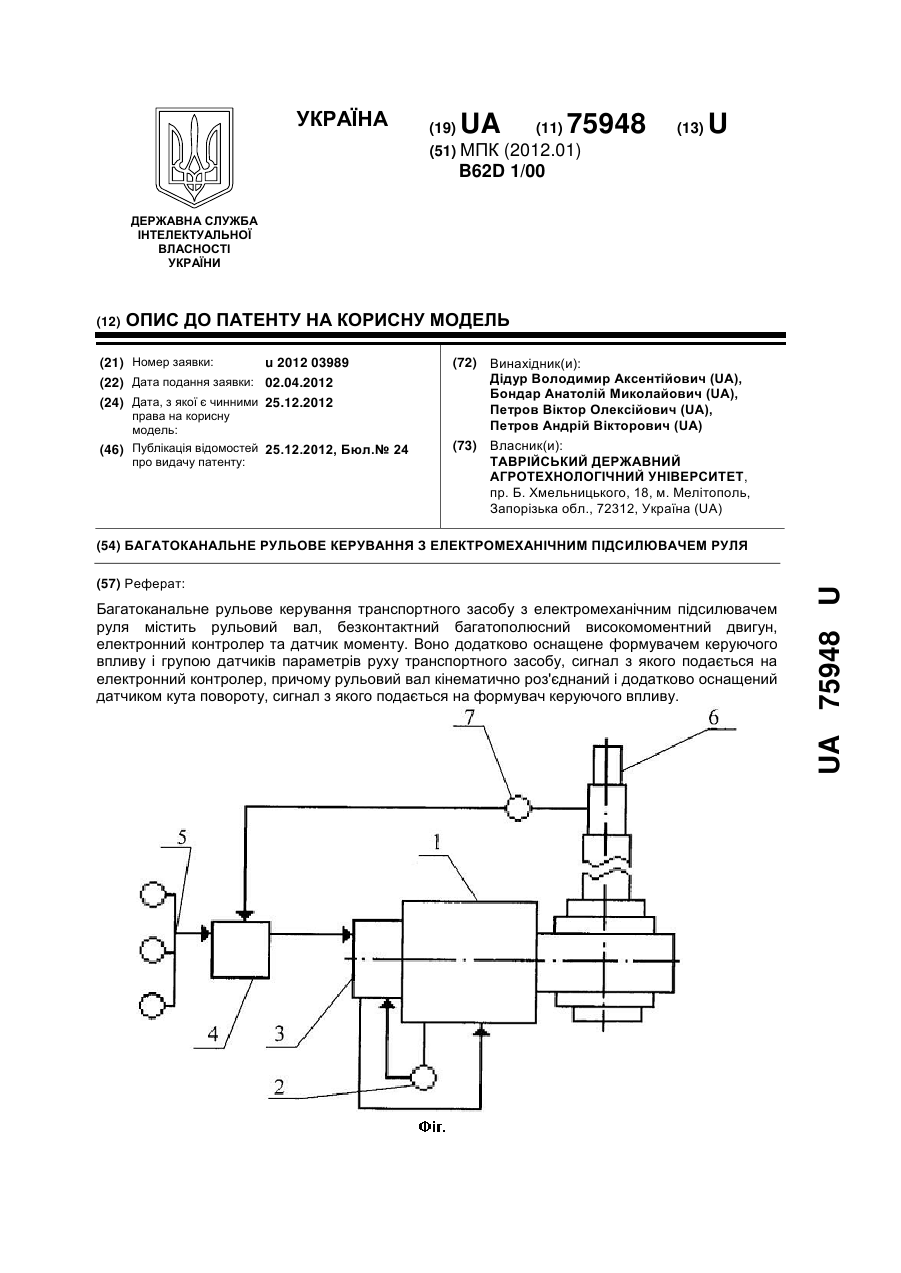
Багатоканальне рульове керування транспортного засобу з електромеханічним підсилювачем руля, що містить рульовий вал, безконтактний багатополюсний високомоментний двигун, електронний контролер та датчик моменту, яке відрізняється тим, що воно додатково оснащене формувачем керуючого впливу і групою датчиків параметрів руху транспортного засобу, сигнал з якого подається на електронний контролер, причому рульовий вал кінематично роз'єднаний і...
Багатоканальне рульове керування транспортного засобу постійної чутливості з елетромеханічним підсилювачем руля з тактильними властивостями

Номер патенту: 90807
Опубліковано: 10.06.2014
Автори: Бондар Андрій Миколайович, Петров Віктор Олексійович, Петров Андрій Вікторович, Дідур Володимир Аксентійович
МПК: B62D 1/00
Мітки: постійної, підсилювачем, транспортного, багатоканальне, властивостями, руля, чутливості, елетромеханічним, засобу, тактильними, керування, рульове
Формула / Реферат:
Багатоканальне рульове керування транспортного засобу постійної чутливості з електромеханічним підсилювачем руля з тактильними властивостями, що містить безконтактний багатополюсний високомоментний двигун, електронний контролер, датчик моменту та датчик положення ротору, яке відрізняється тим, що воно додатково оснащене датчиком швидкості руху транспортного засобу, сигнал з якого подається на електронний контролер.
Попередній патент: Спосіб визначення концентрації емульсійного розчину
Наступний патент: Тактильне рульове керування по положенню з постійною чутливістю до керуючого впливу
Випадковий патент: Котел твердопаливний водогрійний