Система вимірювання деформацій корпусу ракетного двигуна твердого палива при вогневих стендових випробуваннях
Номер патенту: 116966
Опубліковано: 12.06.2017
Автори: Северин Сергій Семенович, Матьянов Юрій Миколайович, Козін Валерій Станіславович
Формула / Реферат
Система вимірювання деформацій корпусу ракетного двигуна твердого палива при вогневих стендових випробуваннях, що складається із охоплюючого криволінійну поверхню переднього днища і циліндричну поверхню з боків двигуна силового каркаса з розміщеними на ньому датчиками переміщення, чутливі елементи яких прикріплені до корпусу ракетного двигуна твердого палива, яка відрізняється тим, що силовий каркас розміщений на м'якому ґрунті, датчики радіальних деформацій розташовані навпроти вірогідного положення двигуна після відкату, датчики повздовжніх деформацій розташовані паралельно осі і доповнені датчиком положення після відкату, причому всі датчики групами по декілька штук підключені до блоків живлення, з телеметричних контактів яких інформація у аналоговому вигляді надходить на локальний комутатор, де перетворюється у цифровий код і далі надходить у приймальний порт програмно-обчислювального комплексу.
Текст
Реферат: Система вимірювання деформацій корпусу ракетного двигуна твердого палива при вогневих стендових випробуваннях складається із охоплюючого криволінійну поверхню переднього днища і циліндричну поверхню з боків двигуна силового каркаса з розміщеними на ньому датчиками переміщення, чутливі елементи яких прикріплені до корпусу ракетного двигуна твердого палива. Силовий каркас розміщений на м'якому ґрунті, датчики радіальних деформацій розташовані навпроти вірогідного положення двигуна після відкату, датчики повздовжніх деформацій розташовані паралельно осі і доповнені датчиком положення після відкату. Всі датчики групами по декілька штук підключені до блоків живлення, з телеметричних контактів яких інформація у аналоговому вигляді надходить на локальний комутатор, де перетворюється у цифровий код і далі надходить у приймальний порт програмнообчислювального комплексу. UA 116966 U (12) UA 116966 U UA 116966 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вогневих стендових випробувань (ВСВ) ракетних двигунів твердого палива (РДТП) і призначена для забезпечення більш якісного вимірювання деформацій корпусу РДТП під час цих випробувань. Відомі способи визначення кутового перекосу і зміщення вектора тяги РДТП за авторським свідоцтвом СРСР № 233103 від 24.02.1989 р., у якому біля соплового днища на корпусі двигуна розміщені рами із розташованими на них сенсорами переміщення потенціометричного типу з тросиками, що витягуються, одним кінцем приєднаними до поверхні сопла у контрольованих точках. Недоліком такої конструкції є коливання рами з вимірювачами відносно корпусу РДТП внаслідок різної жорсткості їх конструкцій. Крім цього при ВСВ РДТП, у яких швидкість вигоряння твердого палива відрізняється від звичайних двигунів в декілька разів, спостерігається таке явище як "відкат" разом із стапелем до упору у тяговимірювальний пристрій. Якщо розміщувати сенсори з тросиками не на рамі, приєднаній до корпусу двигуна, то деформації корпусу повинні вимірюватись відносно нового динамічного положення двигуна після "відкату" у початковий момент роботи двигуна. Найбільш близьким по своїй технічній суті (прототипом) є пристрій для вимірювання деформацій криволінійної поверхні по патенту № 74256. У цьому винаході пристрій складається з силового каркасу, що складається з ребер (жорсткості) і рівномірно розміщених вздовж них датчиків переміщення, аналоговий сигнал яких дозволяє визначити радіальну деформацію криволінійної поверхні переднього днища досліджуваного корпусу. Для цього тросики сенсорів приєднуються до поверхні переднього днища під прямим кутом. Виконання рами з сенсорами із ребер у цьому технічному рішенні є намаганням збільшити жорсткість її конструкції з метою уникнення помилкових вимірювань сенсорами внаслідок їх коливань. При цьому деформації корпусу РДТП в районі переднього днища в повздовжньому напрямку становлять більше 10 мм і можуть біти виділені на фоні похибок вимірювань у той час, як деформації в радіальному напрямку становлять декілька міліметрів і можуть не бути виділені на фоні похибок сенсорів. Використання аналогового сигналу цих сенсорів унеможливлює застосування сучасного математичного апарату для відокремлення помилкових сигналів від дійсних. В основу заявленої корисної моделі поставлена задача зменшення похибок вимірювання деформацій корпусу РДТП під час його вогневих стендових випробувань. Поставлена задача вирішується тим, що рама з сенсорами розміщується окремо від корпусу двигуна на м'якому ґрунті. При цьому сенсори радіальних деформацій розташовуються напроти вірогідного положення корпусу РДТП, яке він займе після "відкату", і в якому він буде перебувати внаслідок дії підтискаючих пристроїв, що заважають корпусу двигуна робити коливальні переміщення на тяговимірювальному пристрої, в напрямку повздовжньої осі РДТП. Сенсори повздовжньої деформації переднього днища розташовані на згаданій рамі паралельно осі каналу заряду і доповнені датчиком переміщення, який вимірює положення днища РДТП після "відкату". Вимірювання повздовжніх деформацій переднього днища повинно відбуватися відносно цього динамічного положення. Усі сенсори групами (наприклад - по 6 штук) електрично зв'язані з блоками живлення, з телеметричних контактів яких надходить інформація про переміщення в аналоговому вигляді - наприклад у вигляді напруги постійного току. Ця інформація з усіх блоків живлення надходить на локальний комутатор, який ставить кожному рівню сигналу постійного току відповідну комбінацію цифр, зашифровану при передачі імпульсами двохпозиційного або чотирьохпозиційного коду. Інформація з локального комутатору подається по кабелям у приймальний порт програмно-обчислювального комплексу. Згаданий комплекс, наприклад - на базі ПЕОМ, розраховує похибку вимірювань і дійсне значення сигналу кожного датчика деформації. Суть запропонованої корисної моделі пояснюється схемою, на якій позначені: 1 - РДТП, 2 стапель для ВСВ, 3 - каркас на м'якому ґрунті, 4 - сенсор положення двигуна після відкату, 5 датчик повздовжньої деформації, 6 - чутливі елементи датчиків, 7 - блок живлення, 8 локальний комутатор, 9 - програмно-обчислювальний комплекс, 10 - кабелі. Датчики радіальних деформацій, тяговимірювальний пристрій та упорна плита умовно не показані. Запропонована корисна модель працює наступним чином. Попередньо стапель, на якому випробується РДТП, підгальмовується гальмами. У перший момент часу, коли з'являється імпульс тяги, стапель з працюючим на ньому двигуном долає тертя гальм і спирається на тяговимірювальний пристрій. Ці ж гальма не дозволяють стапелю разом з двигуном повернутися у первинне положення після випорожнення двигуна внаслідок вигоряння палива і зменшення його тяги. Навпроти положення двигуна після "відкату" на рамі, що встановлена на м'якому ґрунті, розміщені сенсори радіальних переміщень корпусу РДТП, який за рахунок внутрішнього тиску може роздуватися. Рама з вимірювачами охоплює двигун з боку переднього днища. Сенсори осьової деформації також знаходяться на цій рамі разом з сенсором, за 1 UA 116966 U 5 10 15 20 25 допомогою якого вимірюється положення переднього днища РДТПП після "відкату". Схема, по якій обчислюється вимірювана інформація наведена вище. Перевагою корисної моделі є зменшення похибок вимірювань за рахунок: 1 - зменшення амплітуди коливань сенсорів; 2 - математичної обробки результатів вимірювань на ПЕОМ завдяки перетворення сигналу у цифровий код. Крім цього, перевагою корисної моделі є зменшення кількості сенсорів, які, при застосуванні сучасного математичного забезпечення, вже не потрібно приєднувати чутливими елементами (тросиками) перпендикулярно до дотичної лінії контуру криволінійної поверхні у вибраних точках на корпусі РДТП. Таким чином досягається одержання більшого об'єму достовірної інформації про деформації корпусу РДТП і, відповідно, зменшення кількості вогневих стендових випробувань. Запропонована корисна модель дозволяє автоматизувати процес вимірювання і розрахунку похибок вимірювань і дійсного значення сигналу кожного датчика деформації, зменшити похибки вимірювань. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Система вимірювання деформацій корпусу ракетного двигуна твердого палива при вогневих стендових випробуваннях, що складається із охоплюючого криволінійну поверхню переднього днища і циліндричну поверхню з боків двигуна силового каркаса з розміщеними на ньому датчиками переміщення, чутливі елементи яких прикріплені до корпусу ракетного двигуна твердого палива, яка відрізняється тим, що силовий каркас розміщений на м'якому ґрунті, датчики радіальних деформацій розташовані навпроти вірогідного положення двигуна після відкату, датчики повздовжніх деформацій розташовані паралельно осі і доповнені датчиком положення після відкату, причому всі датчики групами по декілька штук підключені до блоків живлення, з телеметричних контактів яких інформація у аналоговому вигляді надходить на локальний комутатор, де перетворюється у цифровий код і далі надходить у приймальний порт програмно-обчислювального комплексу. Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01M 15/12, G01B 5/24
Мітки: корпусу, система, двигуна, ракетного, твердого, деформацій, палива, стендових, випробуваннях, вогневих, вимірювання
Код посилання
<a href="https://ua.patents.su/4-116966-sistema-vimiryuvannya-deformacijj-korpusu-raketnogo-dviguna-tverdogo-paliva-pri-vognevikh-stendovikh-viprobuvannyakh.html" target="_blank" rel="follow" title="База патентів України">Система вимірювання деформацій корпусу ракетного двигуна твердого палива при вогневих стендових випробуваннях</a>
Спосіб та стенд для випробування ракетного двигуна з вільно вкладеним зарядом твердого палива та з соплом, розташованим під кутом до осі корпусу двигуна
Номер патенту: 84001
Опубліковано: 10.09.2008
Автори: Кириченко Анатолій Семенович, Баліцький Іван Петрович, Безкровний Іван Борисович, Корольов Володимир Георгійович, Харченко Володимир Миколайович, Мікуляк Михайло Вікторович
МПК: F16M 11/02, F02K 9/32, F02K 9/96
Мітки: корпусу, вкладеним, соплом, палива, спосіб, випробування, зарядом, твердого, стенд, осі, двигуна, розташованим, вільної, кутом, ракетного
Формула / Реферат:
1. Спосіб випробування ракетного двигуна з вільно вкладеним в нього зарядом твердого палива та з соплом, розташованим під кутом до осі корпусу двигуна, відповідно з яким ракетний двигун встановлюють на стенді для випробування, з горизонтальним розміщенням осі сопла, закріплюють його та запускають, який відрізняється тим, що перед запуском двигун розвертають у вертикальну площину соплом вверх, струшують і повертають у вихідне положення...
Система керування ракетного двигуна твердого палива
Номер патенту: 96685
Опубліковано: 25.11.2011
Автор: Козін Валерій Станіславович
МПК: G01B 15/00, F02K 99/00, G01N 33/22
Мітки: палива, ракетного, двигуна, система, керування, твердого
Формула / Реферат:
1. Система керування ракетного двигуна твердого палива, що має антенний пристрій з вставкою із радіопрозорої термотривкої кераміки, встановлений аксіально у переднє днище ракетного двигуна твердого палива, радіометричний приймач теплового випромінювання, телеметрію у складі температурного перетворювача, локального і основного комутаторів або аналого-цифровий перетворювач і інформаційно-обчислювальний комплекс, яка відрізняється тим, що...
Спосіб утилізації заряду ракетного двигуна твердого палива
Номер патенту: 9340
Опубліковано: 15.09.2005
Автори: Убайдуллаєв Юсуфжон Нуруллайович, Гаврилюк Альберт Олексійович, Телелим Василь Максимович
МПК: F42D 5/04
Мітки: твердого, ракетного, двигуна, заряду, утилізації, спосіб, палива
Формула / Реферат:
1. Спосіб утилізації заряду твердопаливного ракетного двигуна, при якому від'єднують двигун від ракети, закріплюють двигун у камері, запалюють заряд, видаляють утворені продукти з камери, який відрізняється тим, що після запалювання заряду послідовно дроселюють утворені продукти за допомогою камери, при цьому камера складається із декількох секцій, та одночасно конденсують утворені продукти в секціях камери, розділяють по складу утворені...
Спосіб напівнатурного моделювання роботи ракетного двигуна твердого палива
Номер патенту: 99129
Опубліковано: 25.05.2015
Автор: Козін Валерій Станіславович
МПК: G01B 15/00, G01N 33/22, F02K 9/96
Мітки: двигуна, твердого, моделювання, роботи, спосіб, палива, напівнатурного, ракетного
Формула / Реферат:
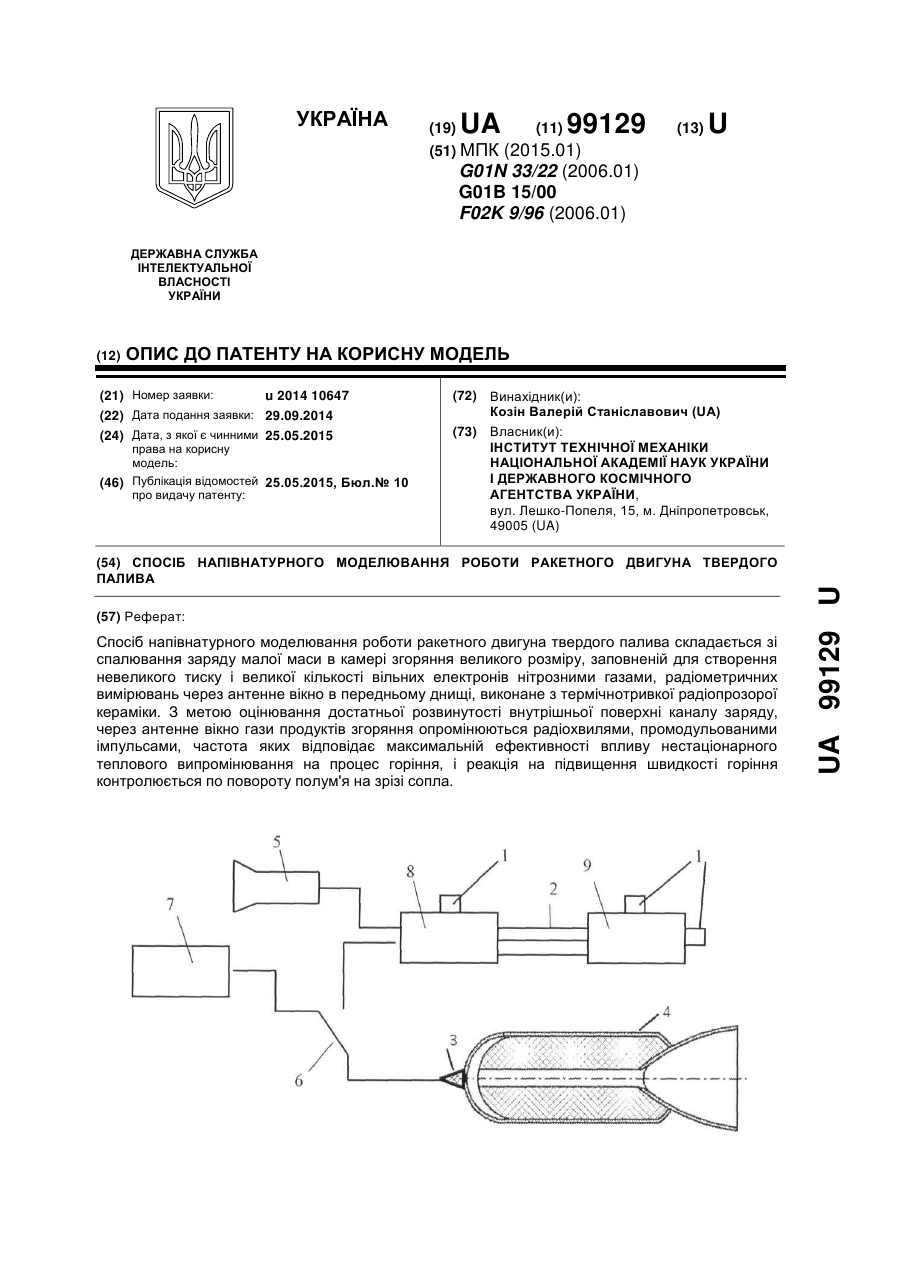
Спосіб напівнатурного моделювання роботи ракетного двигуна твердого палива, що складається зі спалювання заряду малої маси в камері згоряння великого розміру, заповненій для створення невеликого тиску і великої кількості вільних електронів нітрозними газами, радіометричних вимірювань через антенне вікно в передньому днищі, виконане з термічнотривкої радіопрозорої кераміки, який відрізняється тим, що з метою оцінювання достатньої розвинутості...
Спосіб добування твердого ракетного палива з двигуна і пристрій для його реалізації
Номер патенту: 56914
Опубліковано: 15.05.2003
Автори: Підгайний Володимир Олексійович, Гужва Владлен Олексійович, Алексеєва Любов Юріївна
МПК: F02K 9/24
Мітки: палива, ракетного, двигуна, пристрій, спосіб, твердого, реалізації, добування
Формула / Реферат:
1. Спосіб добування твердого ракетного палива з двигуна, який включає розруйнування паливного масиву, розміщеного в корпусі двигуна, шляхом поступально-поздовжнього переміщення радіально зорієнтованих гідравлічних струменів високого тиску всередині вказаного масиву, який відрізняється тим, що паливний масив розруйновують дробленням його спрямованими назустріч один одному гідравлічними струменями високого тиску при одночасному обертанні...
Попередній патент: Спосіб отримання тонкоплівкових гетероперехідних (гп) структур n-sns2/p-sns методом лазерного опромінення вихідного матеріалу sns2
Наступний патент: Пристрій для очищення та регенерації повітря
Випадковий патент: Спосіб визначення моменту зливання металу з конвертера