Вимірювальний блок для навігаційного пристрою
Номер патенту: 1674
Опубліковано: 17.03.2003
Автори: Токарев Олег Дмитрович, Чаус Леонід Михайлович, Карпачов Юрій Андрійович, Захаренко Анатолій Олександрович, Савенко Юрій Миколайович
Формула / Реферат
1. Вимірювальний блок для навігаційного пристрою, який містить корпус, дворамковий кардановий підвіс, маятник, з’єднаний із точкою перетинання його осей за допомогою нижнього вертикального стержня, і два феррозонди, який відрізняється тим, що феррозонди розміщено на горизонтальній площадці, розташованої над кардановим підвісом, центр якої з’єднаний із точкою перетинання його осей за допомогою верхнього вертикального стержня, при цьому магнітні осі феррозондів паралельні горизонтальним осям карданового підвісу, а на кожній з цих осей карданового підвісу встановлений датчик кута.
2. Вимірювальний блок за п. 1, який відрізняється тим, що маятник занурений у рідину малої в’язкості, якою заповнена нижня частина корпусу.
3. Вимірювальний блок за п. 1, який відрізняється тим, що він підключений до мікропроцесора.
Текст
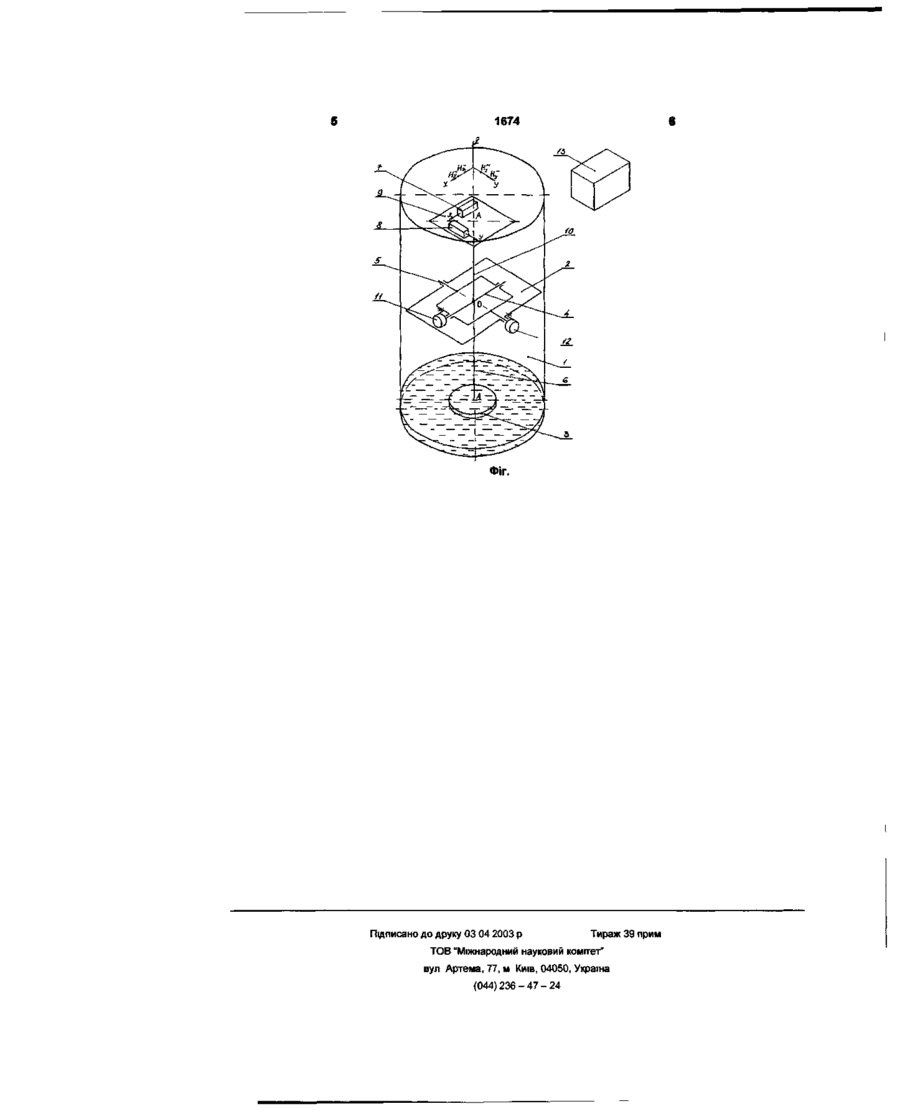
1 Вимірювальний блок для навігаційного пристрою, який містить корпус, дворамковий кардановий ПІДВІС, маятник, з'єднаний із точкою перетинання його осей за допомогою нижнього верти кального стержня, і два феррозонди, який відрізняється тим, що феррозонди розміщено на горизонтальній площадці, розташованої над кардановим ПІДВІСОМ, центр якої з'єднаний із точкою перетинання його осей за допомогою верхнього вертикального стержня, при цьому магнітні осі феррозондів паралельні горизонтальним осям карданового підвісу, а на кожній з цих осей карданового підвісу встановлений датчик кута 2 Вимірювальний блок за п 1, який відрізняється тим, що маятник занурений у рідину малої в'язкості, ЯКОЮ заповнена нижня частина корпусу 3 Вимірювальний блок за п 1, який відрізняється ллм, що він підключений до мікропроцесора Корисна модель відноситься до галузі навігаційних вимірювальних засобів і може бути використана в мобільних роботах і інших транспортних установках, зокрема, - які переміщуються по нерівній поверхні ВІДОМІ навігаційні пристрої (Д С Пельпор «Гироскопические приборы и автопилоты», «Машиностроение», М , 1964г, с 24 фиг 1 8,с 136, фиг 4 18, Л И Каргу «Гироскопические приборы и системы», «Судостроение», Л , 1988г, с 140, рис 4 1), що складаються з триступеневого маховика, встановленого в кардановому ПІДВІСІ, І датчиків кута, зв'язаних з цим ПІДВІСОМ Недоліком цих пристроїв є те, що в них маховик обертається з великою кутовою швидкістю, унаслідок чого знижується ресурс їхньої роботи і зменшується надійність Найбільш близьким по технічній сутності до корисної моделі, яка заявляється, є вимірювальний блок (Ю В Афанасьев «Феррозонды», «Энергия», Л , 1969г, с 146-147, рис53,а), утримуючий чутливу систему, до складу якої входять карданів ПІДВІС, установлені на його рамках на площадці два феррозонда перпендикулярно друг до друга і маятник, зв'язаний із площадкою за допомогою стержня Розташування магнітних осей феррозондів по осях внутрішньої і зовнішньої рамок карданова підвісу дозволяє одержати ВІДОМОСТІ про орієнтацію тіла в якій-небудь точці простору, приміром, обчислити курс тіла при його русі Однак цей пристрій має такий недолік з його допомогою неможливо визначити кути відхилення тіла від місцевої вертикалі в двох взаємно перпендикулярних площинах, одна з яких, приміром, є площиною руху тіла В основу корисної моделі покладена задача удосконалення вимірювального блоку навігаційного пристрою шляхом розміщення в одному корпусі феррозондів, а також датчиків кута, розташованих по нормалі друг до друга по горизонтальних осях карданова підвісу, що дозволить визначати курс тіла при його русі і кути його відхилення від місцевої вертикалі Поставлена задача вирішується так, що у вимірювальному блоці для навігаційного пристрою, який містить корпус, дворамковий кардановий ПІДВІС, маятник, з'єднаний із точкою перетинання його осей за допомогою нижнього вертикального стержня, і два феррозонди, новим є те, що феррозонди розміщено на горизонтальній площадці, розташованої над кардановим ПІДВІСОМ, центр якої з'єднаний із точкою перетинання його осей за допомогою верхнього вертикального стержня, при цьому магнітні осі феррозондів паралельні горизонтальним осям карданового підвісу, а на кожної з цих г CD 1674 осей карданового підвісу встановлений датчик кута, крім того, маятник занурений у рідину малої в'язкості, ЯКОЮ заповнена нижня частина корпуса, а блок підключений до мікропроцесора Запропонована конструкція вимірювального блоку дозволяє розмістити в одному корпусі чотири датчики кута, два з яких (феррозонди) використовуються для визначення курсу тіла при його русі, а два інших - для виміру кутів відхилення тіла від місцевої вертикалі в двох взаємно перпендикулярних площинах Відсутність маховика в конструкції блоку дозволить підвищити надійність його роботи і збільшити ресурс експлуатації Загальний вид вимірювального блоку наведений на кресленні До складу блоку входять корпус 1, дворамочний карданів ПІДВІС 2, маятник 3, жорстко з'єднаний із точкою перетинання О його осей 4 і 5 за допомогою вертикального стержня 6, феррозондова система, яка складається з феррозондів 7 і 8, установлених на горизонтальній площадці 9, розташованої над кардановим ПІДВІСОМ 2, центр якої жорстко з'єднаний із точкою О підвісу за допомогою верхнього вертикального стержня 10, датчики кута 11 і 12, установлені ВІДПОВІДНО на осях 4 і 5 карданова підвісу 2 Магнітні осі феррозондів 7 і 8 збігаються ВІДПОВІДНО з осями 4 і 5 підвісу 2 Феррозондова системапризначена для виміру складових перемінного і постійного магнітних полів, при цьому геометричне підсумовування векторів цих складових робиться за допомогою мікропроцесора 13 Датчики кута 11 і 12 дозволяють вимірювати кути відхилення тіла від місцевої вертикалі в двох взаємно перпендикулярних площинах, одна з яких є площиною руху тіла Маятник 3 призначений для стабілізації карданова підвісу 2 і площадки 9 у горизонтальному положенні Нижню частину корпуса 1 заповнює рідина малої в'язкості, яка використовується з метою розвантаження опор карданова підвісу 2, що зменшує втрати на тертя в опорах Щоб уникнути впливу маси маятника 3 на роботу феррозондової системи феррозонди 7 і 8 віднесені від нього на визначену відстань Робота запропонованого блоку здійснюється наступним чином На горизонтальній площадці 9, яка стабілізується маятником 3, феррозонди 7 і 8 розміщені так, що їхні магнітні осі виявляються взаємно перпендикулярними з можливістю визначення кутового положення тіла щодо напрямку магнітного меридіана До феррозондової системи підводиться перемінний струм низької частоти, що створює перемінне поле з вектором Н~, спрямованим уздовж осі А-А корпуса 1 При відхиленні цієї осі від вертикалі на деякий кут а на феррозондову систему буде діяти не тільки постійне геомагнітне поле Н", але і перемінне поле Н~, значення складових яких Нх~,Нх~,Ну",Ну~ передаються по кабелю на мікропроцесор 13, де відбувається їх геометричне підсумовування, що дозволяє визначати кут відхилення тіла від напрямку магнітного меридіана при орієнтації тіла в просторі Датчики кута 11 і 12 можуть бути представлені, наприклад, індукційними датчиками кута рамкового типу При вертикальному положенні осі А-А корпуса 1 ВИХІДНІ обмотки датчиків 11 і 12 будуть знаходитися в нульовому положенні, тобто вихідний сигнал датчика буде дорівнювати нулю Відхилення осі А-А від вертикалі призведе до кутового переміщення вихідної обмотки в магнітному полі, створюваному обмоткою збудження датчика, унаслідок чого на його виході виникає електричний сигнал, пропорційний куту переміщення а вихідної обмотки, який передається по кабелю в мікропроцесор 13 Таким чином, датчики 11 і 12, установлені ВІДПОВІДНО на осях 4 і 5, дозволяють визначати кути відхилення тіла від місцевої вертикалі в двох взаємно перпендикулярних площинах, одна з яких є площиною його руху 1674 Фіг. Підписано до друку 03 04 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044) 236 - 47 - 24
ДивитисяДодаткова інформація
Автори англійськоюKarpachov Yurii Andriiovych, Savenko Yurii Mykolaiovych, Chaus Leonid Mykhailovych, Zakharenko Anatolii Oleksandrovych
Автори російськоюКарпачев Юрий Андреевич, Савенко Юрий Николаевич, Чаус Леонид Михайлович, Захаренко Анатолий Александрович
МПК / Мітки
МПК: G01C 21/04
Мітки: навігаційного, блок, вимірювальний, пристрою
Код посилання
<a href="https://ua.patents.su/4-1674-vimiryuvalnijj-blok-dlya-navigacijjnogo-pristroyu.html" target="_blank" rel="follow" title="База патентів України">Вимірювальний блок для навігаційного пристрою</a>
Блок управління комплектного пристрою
Номер патенту: 766
Опубліковано: 15.03.2001
Автори: Ісаков Станіслав Васильович, Бобровніков Олександр Леонідович
МПК: H05K 5/00
Мітки: комплектного, управління, пристрою, блок
Формула / Реферат:
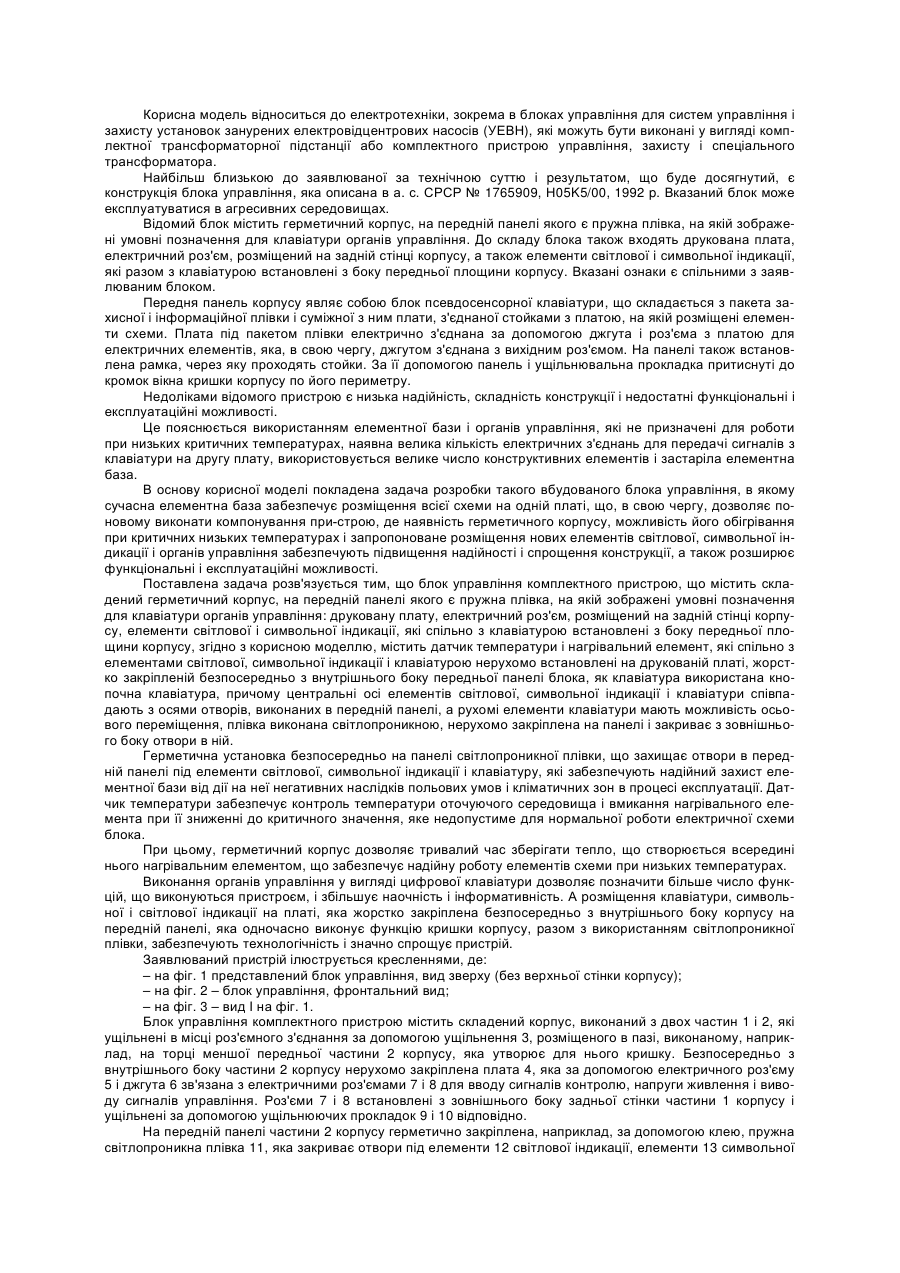
Блок управління комплектного пристрою, що містить складений герметичний корпус, на передній панелі якого є пружна плівка, на якій зображені умовні позначення для клавіатури органів управління, друковану плату, електричний роз’їм, розміщений на задній стінці корпусу, елементи світлової і символьної Індикації, які спільно з клавіатурою встановлені з боку передньої площини корпусу, який відрізняється тим, що він містить датчик температури і...
Герметична гальванічна батарея, переважно для навігаційного обладнання, і спосіб її збирання
Номер патенту: 48637
Опубліковано: 15.08.2002
Автори: Пуговкін Михайло Олексійович, Пуговкін Андрій Олексійович
Мітки: переважно, навігаційного, збирання, батарея, обладнання, спосіб, герметична, гальванічна
Формула / Реферат:
1. Герметична гальванічна батарея, переважно для навігаційного обладнання, яка містить блок первинних гальванічних елементів, контейнер, який має стягнені гвинтовими стяжками днище та кришку з відводами блока, яка відрізняється тим, що контейнер виконаний з прокладками, пошарово розміщеними по його внутрішньому контуру з можливістю обхоплення блока, кришка забезпечена засобом керування роботою батареї і герметичним засобом виводу відводів, а...
Пристрій для продувки металу, змінний блок для установлення в пристрій для продувки металу та затуляючий елемент для закриття каналу пристрою для продувки металу
Номер патенту: 11053
Опубліковано: 25.12.1996
Автори: Кеннет Віл'ям Бейтс, Пітер Рональд Діксон, Джозеф Вільям Кадбі
МПК: C21C 5/48
Мітки: продувки, змінній, закриття, елемент, металу, пристрою, пристрій, затуляючий, каналу, блок, установлення
Формула / Реферат:
(57) 1. Устройство для продувки металла газо-, или порошкообразными, или твердыми реагентами, содержащее сопловой блок из огнеупорного материала с по крайней мере одним соплом в виде выполненного в блоке канала для подачи реагентов, фурменную трубу, установленную с возможностью перемещения в канале, трубчатый элемент, размещенный в канале коаксиально фурменной трубе между стенкой канала и фурменной трубой, закрывающие каналы элементы в виде...
Будівельний блок

Номер патенту: 22846
Опубліковано: 21.04.1998
Автори: Винник Іван Михайлович, Тимощук Микола Станіславович, Гоголь Мирон Васильович
МПК: E04C 1/00
Мітки: будівельний, блок
Формула / Реферат:
Будівельний блок, який складається з монолітного тіла з верхньою полкою, поздовжніх! поперечних стінок змінного січення з порожнинами між ними, відкритими в основі блока, який відрізняється тим, що котангенс кута нахилу стінок Із сторони порожнин до основи блоку в поперечному, напрямку не менше 1:9, в поздовжньому - не менше 1:3.
Бетонний порожнистий блок

Номер патенту: 34358
Опубліковано: 15.02.2001
Автор: Мельник Ігор Володимирович
Мітки: блок, порожнистий, бетонний
Текст:
...частини бетонного тіла 1. Після ущільнення бетонної суміші розкладають і фіксують в проектному положенні вставки 2. Подають і ущільнюють решту бетонної суміші та встановлюють стропува льні петлі 3, за допомогою яких блок піднімають і звільняють від металоформи (опалубки) після затвердіння бетону. Фіг. 1 Фіг. 2 Фіг. 3 Фіг. 4 __________________________________________________________ ДП "Український інститут промислової власності"...
Попередній патент: Ротор подрібнювача
Наступний патент: Елемент регулярної насадки масообмінного апарата
Випадковий патент: Пристрій для виготовлення гнутих деталей із деревини