Система для вимірювання швидкості звуку
Формула / Реферат
Система для измерения скорости звука, содержащая последовательно соединенные мультивибратор, пьезоэлектрический преобразователь и находящийся на фиксированном расстоянии от него отражатель, отличающаяся тем, что, к выводу мультивибратора подключены последовательно соединенные электронно-счетный частотомер, процессор цифровой обработки сигналов и микро-ЭВМ.
Текст
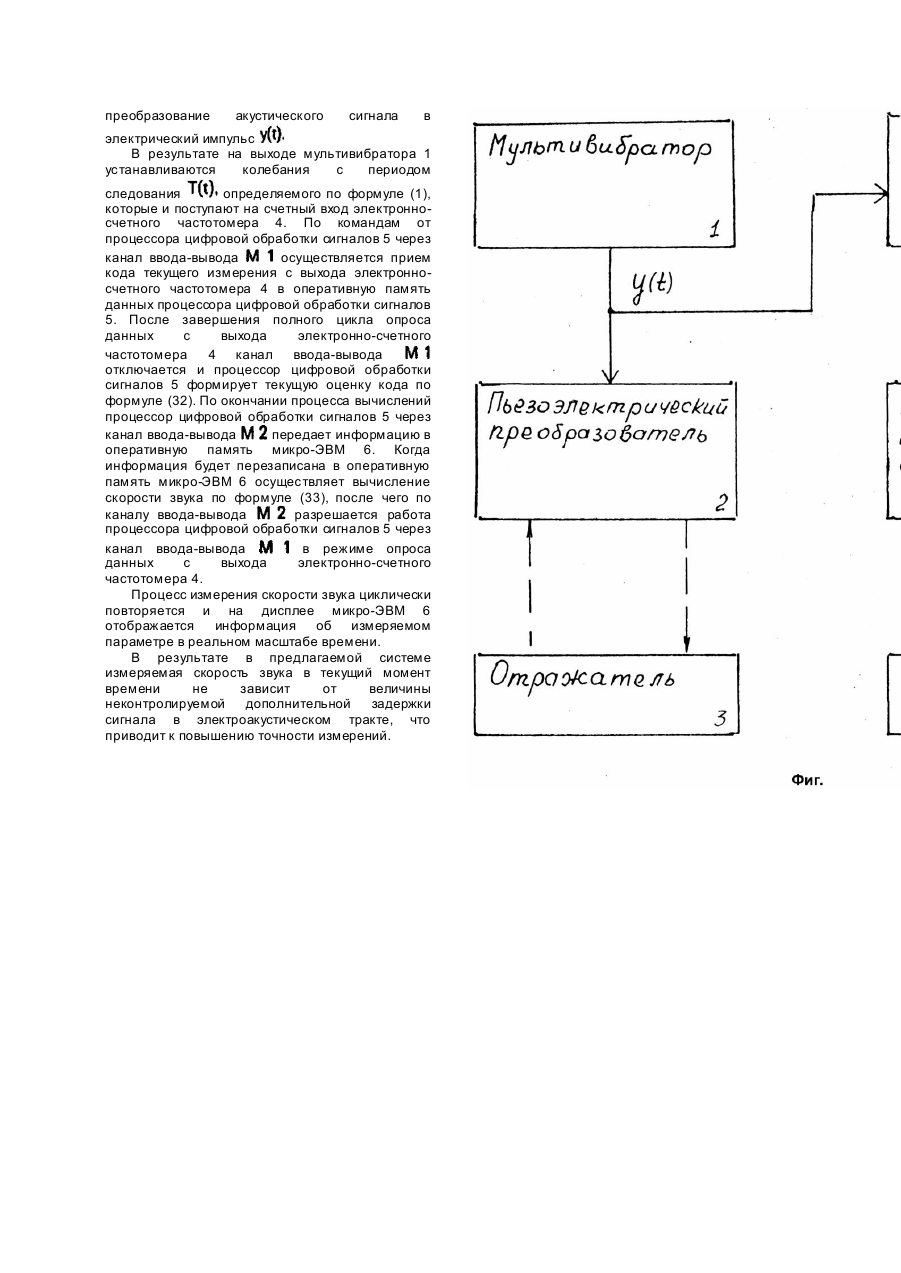
Изобретение относится к технике ультразвукового контроля и может быть использовано для измерения скорости звука в жидких средах. Известен измеритель скорости звука, содержащий последовательно соединенные генератор гармонических колебаний, излучающий и приемный электроакустические преобразователи и фазометр (Серавин Г.Н. Измерение скорости звука в океане. - Л.: Гидрометеоиздат, 1979. - С.52 - 54). Однако известный измеритель скорости звука не позволяет исключить неоднозначность показаний вследствие того, что фазометр не различает фазовых сдвигов, о тличающи хся на целое число периодов, что приводит к погрешностям измерения скорости звука и отрицательно сказывается на точности измерений. Наиболее близким к заявляемой системе по технической сущности и достигаемому результату является устройство для измерения скорости звука, содержащее последовательно соединенные генератор и усилитель импульсов, выполненные по общей схеме в виде мультивибратора, пьезоэлектрический преобразователь и находящийся на фиксированном расстоянии от него отражатель (А.с. СССР №1386853, кл. G01H5/00, 1988). В устройстве-прототипе период следования импульсов на выходе мультивибратора зависит от расстояния между пьезоэлектрическим преобразователем и отражателем, величины скорости звука в исследуемой среде и неконтролируемой дополнительной задержки сигнала в электроакустическом тракте: где - период следования импульсов на выходе мультивибратора; - расстояние между пьезоэлектрическим преобразователем и отражателем; - скорость звука в исследуемой среде; - неконтролируемая дополнительная задержка сигнала в электроакустическом тракте; - время. Учитывая, что из (1) можно получить рабочее уравнение для определения скорости звука где - скорость звука в исследуемой среде; - расстояние между пьезоэлектрическим преобразователем и отражателем; - период следования импульсов на выходе мультивибратора; - время; - неконтролируемая дополнительная задержка сигнала в электроакустическом тракте. Таким образом, наличие неконтролируемой дополнительной задержки сигнала в электроакустическом тракте приводит к появлению в уравнении измерений (2) дополнительной относительной погрешности где погрешность; дополнительная относительная - неконтролируемая дополнительная задержка сигнала в электроакустическом тракте; - период следования импульсов на выходе мультивибратора; - время. Наличие дополнительной относительной погрешности в (3) отрицательно влияет на точность измерений скорости звука, ограничивает применение данной системы. В основу настоящего изобретения поставлена задача создания системы для измерения скорости звука в жидких средах путем усовершенствования функциональной схемы устройства по а.с. СССР №1386853, в которой за счет преобразования частоты импульсов на выходе мультивибратора сформирован код, не зависящий от величины неконтролируемой дополнительной задержки сигнала в электроакустическом тракте, что приводит к уменьшению относительной дополнительной погрешности и за счет этого достигается повышение точности измерений заявляемой системы. Эта задача, решается системой для измерения скорости звука, содержащей последовательно соединенные мультивибратор, пьезоэлектрический преобразователь и находящийся на фиксированном расстоянии от него отражатель, согласно изобретению, она снабжена последовательно соединенными к выходу мультивибратора электронно-счетным частотомером, процессором цифровой обработки сигналов и микро-ЭВМ. Совокупность всех существенных признаков предлагаемой схемы устройства для измерения скорости звука, включая отличительные, а именно введение в систему для измерения скорости звука последовательно соединенных к выходу мультивибратора электронно-счетного частотомера, процессора цифровой обработки сигналов и микро-ЭВМ позволяет получить код, который не зависит от величины неконтролируемой дополнительной задержки сигнала в электроакустическом тракте, что достигается путем цифровой фильтрации, реализуя при этом алгоритм идентификации измерения скорости звука. Суть алгоритма цифровой идентификации измерения скорости звука заключается в следующем. Сигнал с вы хода мультивибратора с помощью электронно-счетного частотомера преобразуется в код где - код на выходе электронно-счетного частотомера; - коэффициент деления частоты - частота внутреннего опорного генератора электронно-счетного частотомера; - период следования импульсов на выходе мультивибратора; - время. С учетом формулы (1) выражение (4) можно представить как где - составляющая кода, отражающая физическую сущность измерений; вектор состояния кода; - операция транспонирования; код, зависящий от величины неконтролируемой дополнительной задержки сигнала в электроакустическом тракте и представляет собой шум наблюдений с математическим ожиданием дисперсией Далее представим код в виде ряда Тейлора с конечным числом членов разложения на интервале наблюдения численно равному времени осреднения электронносчетного частотомера матрица преобразования. Идентификация измерений осуществляется путем нахождения текущей оценки вектора в момент времени на основе последних наблюдений. Тогда код на выходе электронно-счетного частотомера в дискретном виде можно представить как Найдем производные от кода продифференцировав выражение (8) n раз по где - составляющая кода физической сущности измерений, а - погрешность наблюдения, определяемые в момент наблюдений по результатам последних наблюдений. Для более удобной записи совокупности наблюдений (15) введем, в рассмотрение вектор Учитывая, что реализация алгоритма идентификации измерения осуществляется цифровыми устройствами, которые оперируют с дискретными отсчетами кода представляющий собой первую строку матрицы Учитывая, что путем введения дискретного времени где - дискретность измерений, тогда дискретную модель системы (9) можно представить системой разностных уравнений для вектора Первую получаем соотношение компоненту вектора с помощью векторов можно представить в виде Результаты наблюдений запишутся в виде Для момента времени по результатам iых измерений систему (11) представим в векторной форме и (15) при этом Систему наблюдений (21) представим в виде одного вектора наблюдений звука по формуле где - константа, хранящаяся постоянной памяти микро-ЭВМ; - коэффициент деления частоты Идентификация измерений теперь заключается в нахождении такой оценки вектора норму которая будет минимизировать где невязки. вектор Тогда, дифференцируя (26) по вектору и приравнивая производную нулю имеем Из (28) получим наилучшее в среднеквадратическом смысле решение уравнения (26) Учитывая, что в (4) код в (30) можно коэффициентов С уче том (29) и (31) текущую оценку запишем в скалярном виде где - частота внутреннего опорного генератора электронно-счетного частотомера; - расстояние между пьезоэлектрическим преобразователем и отражателем; - оценка кода по формуле (32). Уравнения (32) и (33) представляют собой аппаратную реализацию алгоритма цифровой идентификации измерения скорости звука, реализация которого на основе электронносчетного частотомера, процессора цифровой обработки сигналов и микро-ЭВМ позволяет повысить точность измерений скорости звука в реальном масштабе времени за счет минимизации ошибки, вызываемой наличием неконтролируемой дополнительной задержки сигнала в электроакустическом тракте. Величина ошибки вызываемая наличием неконтролируемой дополнительной задержки сигнала в электроакустическом тракте минимизируется по формуле линейно зависит от периода (при тогда можно принять число членов ряда Тейлора в (11) равным С учетом возможности получения решения уравнений (29) и (30) в реальном масштабе времени примем число наблюдений Тогда преобразующую функцию представить в виде прямоугольной матрицы в когда -текущая оценка кода - код полного наблюдения на выходе электронного частотомера в моменты времени Система (32) реализуется непосредственно в процессоре цифровой обработки сигналов путем занесения на этапе программирования в постоянную память коэффициентов значений матрицы (31), а в оперативную память данных полную совокупность наблюдений с выхода электронно-счетного частотомера. После цифровой обработки данных по формуле (32) код вводится в оперативную память микро-ЭВМ, где вычисляется скорость где - определены в формуле (32). При этом представляет собой абсолютную погрешность цифровой идентификации измерений, которая при известных статистических параметрах шума наблюдений в (7) будет минимальной, что подтверждает эффективность предлагаемого схемотехнического решения. На чертеже (фиг.) представлена функциональная схема предлагаемой системы. Система для измерения скорости звука содержит мультивибратор 1, пьезоэлектрический преобразователь 2, находящийся на фиксированном расстоянии от него отражатель 3, электронно-счетный частотомер 4, процессор цифровой обработки сигналов 5, микро-ЭВМ 6. Выход мультивибратора 1 подключен к входу пьезоэлектрического преобразователя 2 и к счетному вход электронно-счетного частотомера 4. Электронно-счетный частотомер 4 через канал ввода-вывода соединен с процессором цифровой обработки сигналов 5. Процессор цифровой обработки сигналов 5 через канал ввода-вывода соединен с микро-ЭВМ 6. Система для измерения скорости звука работает следующим образом. При включении питания на выходе мультивибратора 1 появляется импульсный сигнал который поступает на пьезоэлектрический преобразователь 2. С помощью пьезоэлектрического преобразователя 2 электрический импульс преобразуется в ультразвуковой сигнал, который распространяется в исследуемую срезу и после отра-жения от отражателя 3 поступает на пьезоэлектрический преобразователь 2, где происходит обратное преобразование акустического сигнала в электрический импульс В результате на выходе мультивибратора 1 устанавливаются колебания с периодом следования определяемого по формуле (1), которые и поступают на счетный вход электронносчетного частотомера 4. По командам от процессора цифровой обработки сигналов 5 через канал ввода-вывода осуществляется прием кода текущего измерения с выхода электронносчетного частотомера 4 в оперативную память данных процессора цифровой обработки сигналов 5. После завершения полного цикла опроса данных с выхода электронно-счетного частотомера 4 канал ввода-вывода отключается и процессор цифровой обработки сигналов 5 формирует текущую оценку кода по формуле (32). По окончании процесса вычислений процессор цифровой обработки сигналов 5 через канал ввода-вывода передает информацию в оперативную память микро-ЭВМ 6. Когда информация будет перезаписана в оперативную память микро-ЭВМ 6 осуществляет вычисление скорости звука по формуле (33), после чего по каналу ввода-вывода разрешается работа процессора цифровой обработки сигналов 5 через канал ввода-вывода в режиме опроса данных с выхода электронно-счетного частотомера 4. Процесс измерения скорости звука циклически повторяется и на дисплее микро-ЭВМ 6 отображается информация об измеряемом параметре в реальном масштабе времени. В результате в предлагаемой системе измеряемая скорость звука в текущий момент времени не зависит от величины неконтролируемой дополнительной задержки сигнала в электроакустическом тракте, что приводит к повышению точности измерений.
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for measurement of sound velocity
Автори англійськоюPolonskyi Oleksandr Dmytrovych
Назва патенту російськоюСистема для измерения скорости звука
Автори російськоюПолонский Александр Дмитриевич
МПК / Мітки
МПК: G01F 1/66, G01H 5/00, G01N 29/07, G01N 29/00
Мітки: швидкості, система, звуку, вимірювання
Код посилання
<a href="https://ua.patents.su/4-17535-sistema-dlya-vimiryuvannya-shvidkosti-zvuku.html" target="_blank" rel="follow" title="База патентів України">Система для вимірювання швидкості звуку</a>
Пристрій для вимірювання швидкості звуку
Номер патенту: 17533
Опубліковано: 06.05.1997
Автори: Дорошков Олександр Валентинович, Полонський Олександр Дмитрович
МПК: G01N 29/07, G01H 5/00, G01F 1/66, G01N 29/00
Мітки: звуку, вимірювання, швидкості, пристрій
Формула / Реферат:
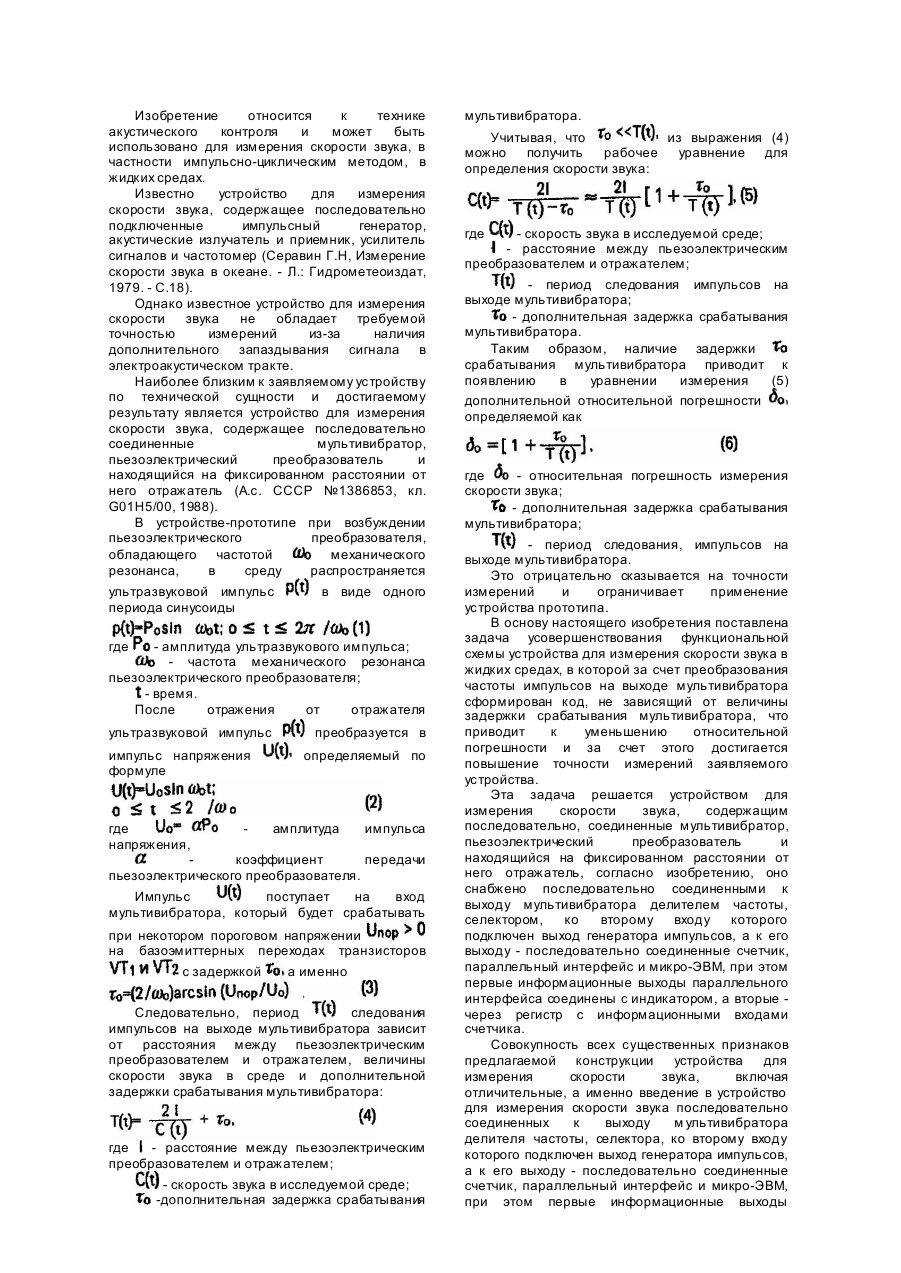
Устройство для измерения скорости звука, содержащее последовательно соединенные мультивибратор, пьезоэлектрический преобразователь и находящийся на фиксированном расстоянии от него отражатель, отличающееся тем, что оно снабжено последовательно соединенными к выходу мультивибратора делителем частоты и селектором, ко второму входу которого подключен генератор импульсов, а к его выходу последовательно соединенные счетчик, параллельный интерфейс...
Пристрій для вимірювання швидкості звуку
Номер патенту: 12449
Опубліковано: 28.02.1997
Автори: Дорошков Олександр Валентинович, Полонський Олександр Дмитрович
МПК: G01N 29/00, G01F 1/66, G01N 29/07, G01H 5/00
Мітки: звуку, пристрій, вимірювання, швидкості
Формула / Реферат:
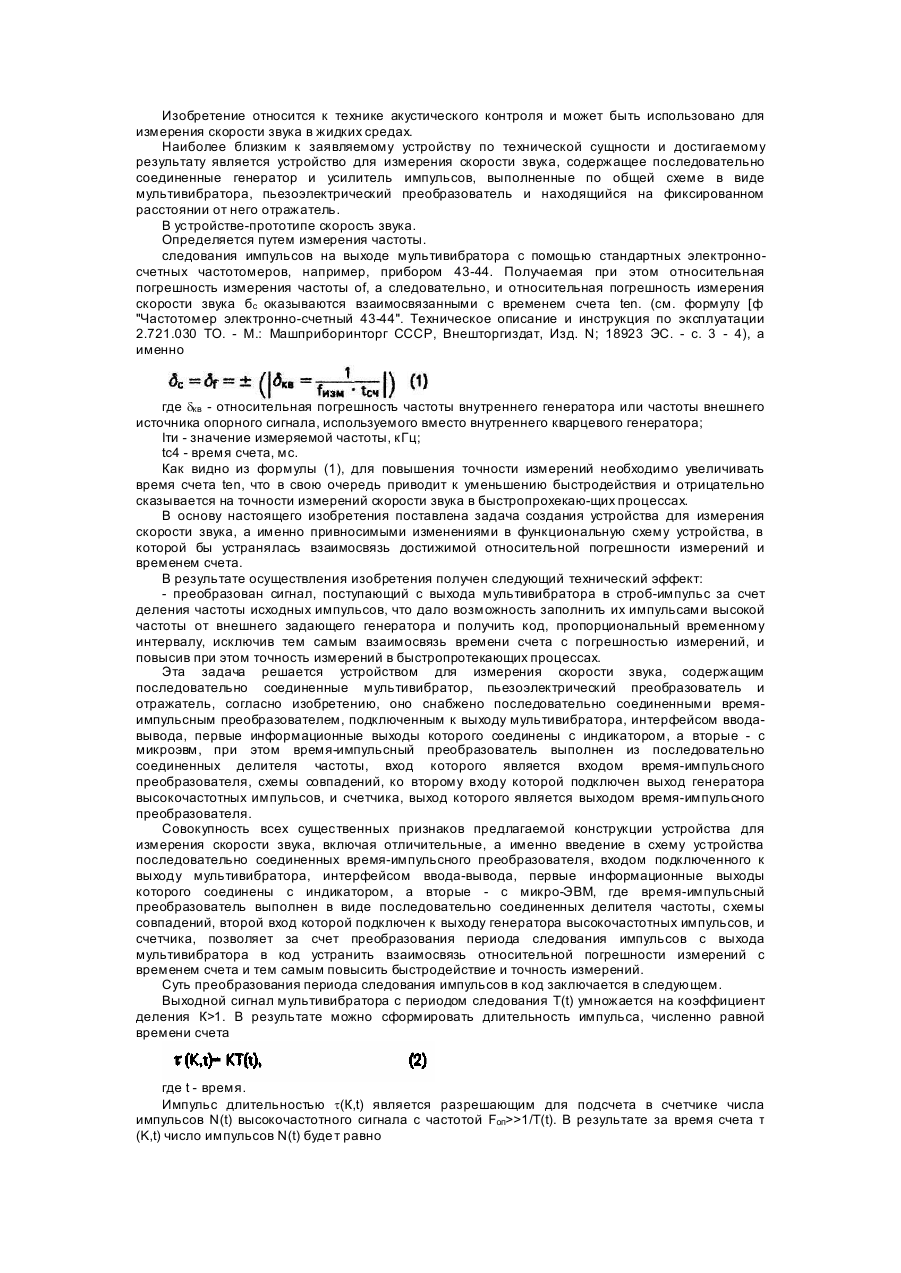
Устройство для измерения скорости звука, содержащее последовательно соединенные мультивибратор, пьезоэлектрический преобразователь и находящийся па фиксированном расстоянии от него отражатель, отличающееся тем, что оно снабжено последовательно соединенными время-импульсным преобразователем, подключенным к выходу мультивибратора, интерфейсом ввода-вывода, первые информационные выходы которого соединены с индикатором, а вторые - с микроЭВМ,...
Гідрологічний вимірювач швидкості звуку
Номер патенту: 14164
Опубліковано: 25.04.1997
Автори: Толстошеев Олексій Петрович, Холкін Володимир Васильович
МПК: G01H 5/00
Мітки: вимірювач, гідрологічний, швидкості, звуку
Формула / Реферат:
Гидрологический измеритель скорости звука по авт.св. № 1255871, отличающийся тем, что, с целью повышения достоверности результатов измерения, он снабжен имитатором эхо-сигналов, выполненным из последовательно соединенных генератора опорных импульсов, счетчика и формирователя имитирующих эхо-сигналов, одновибратором, выход которого соединен с входом "Установка" счетчика, вторым коммутатором, первый информационный вход которого...
Гідрологічний вимірювач швидкості звуку
Номер патенту: 14195
Опубліковано: 25.04.1997
Автори: Дудніков Геннадій Павлович, Толстошеев Олексій Петрович, Холкін Володимир Васильович
МПК: G01N 29/07, G01H 5/00, G01F 1/66
Мітки: швидкості, гідрологічний, звуку, вимірювач
Формула / Реферат:
1. Гидрологический измеритель скорости звука, содержащий последовательно соединенные управляемый генератор, формирователь импульсов, делитель частоты, распределитель импульсов, генератор возбуждающих импульсов, ограничитель, усилитель, компаратор и первый RS-триггер, последовательно соединенные коммутатор и интегратор, измерительную ячейку, связанную с выходом генератора возбуждающих импульсов, и подключенные к выходу управляемого...
Пристрій для виміру швидкості розходження звуку в рідині

Номер патенту: 14154
Опубліковано: 25.04.1997
Автор: Бабій Владлен Іванович
МПК: G01H 5/00, G01N 29/02
Мітки: виміру, пристрій, звуку, швидкості, рідини, розходження
Формула / Реферат:
Устройство для измерения скорости распространения звука в жидкости, содержащее обратимый электроакустический преобразователь, рабочая поверхность которого имеет форму поверхности тела вращения, а образованная этой поверхностью полость предназначена для исследуемой жидкости, и электронный измеритель скорости звука, электрически соединенный с обратимым электроакустическим преобразователем, отличающееся тем, что, с целью повышения...
Попередній патент: Спосіб одержання антиаутотоксичної сироватки
Наступний патент: Лікувально-діагностична система бугайова
Випадковий патент: Пристрій для видавлювання в'язкої речовини