Спосіб геоелектророзвідки малих глибин і пристрій для його здійснення
Номер патенту: 17769
Опубліковано: 20.05.1997

Формула / Реферат
1. Спосіб геоелектророзвідки малих глибин, при якому в досліджуваному середовищі збуджується первинне електромагнітне поле шляхом пропускання в генераторній індуктивній рамці прямокутних імпульсів струму; вимірюються в задані моменти часу в паузах між Імпульсами первинного електромагнітного поля значення електрорушійної сили, наведеної в приймальній Індуктивній рамці вторинним електромагнітним полем, збудженим протікаючими в середовищі блукаючими струмами І в результатах вимірювання визначаються його характеристики, який відрізняеться тим, що додатково, перед Збудженням первинного електромагнітного поля, визначаються моменти переходу через нуль регулярної завади від ліній електропередач; виділені моменти використовуються як початок збудження первинного електромагнітного поля тривалістю рівною 1/8 частинам періоду регулярної завади, а тривалість паузи між Імпульсами первинного поля складає -1/8 частину періода регулярної завади.
2. Пристрій для геоелектророзвідки малих глибин, що складається з задаючого генератора, формувача імпульсів управління, генераторного блока, генераторної І приймальної рамок, попереднього підсилювача І вимірювального блока, причому до першого І другого виходів формувача Імпульсів управління приєднані входи управління генераторного і вимірювального блоків, до сигнального виходу генераторного блока під'єднана генераторна рамка, до приймальної Індуктивної рамки підключені послідовно з'єднані попередній підсилювач І вимірювальний блок, до другого Інформативного входу котрого під'єднані Інформативний вихід генераторного блока, який відрізняється тим, що містить перемикач І послідовно з'єднані полосовий фільтр, диференціюючий елемент, випрямляч, піковий деректор 1 одновібратор, причому перший І другий входи перемикача під'єднані відповідно до виходу задаючого генератора І виходу одновібратора, а вхід полосового фільтра приєднаний до виходу попереднього підсилювача.
Текст
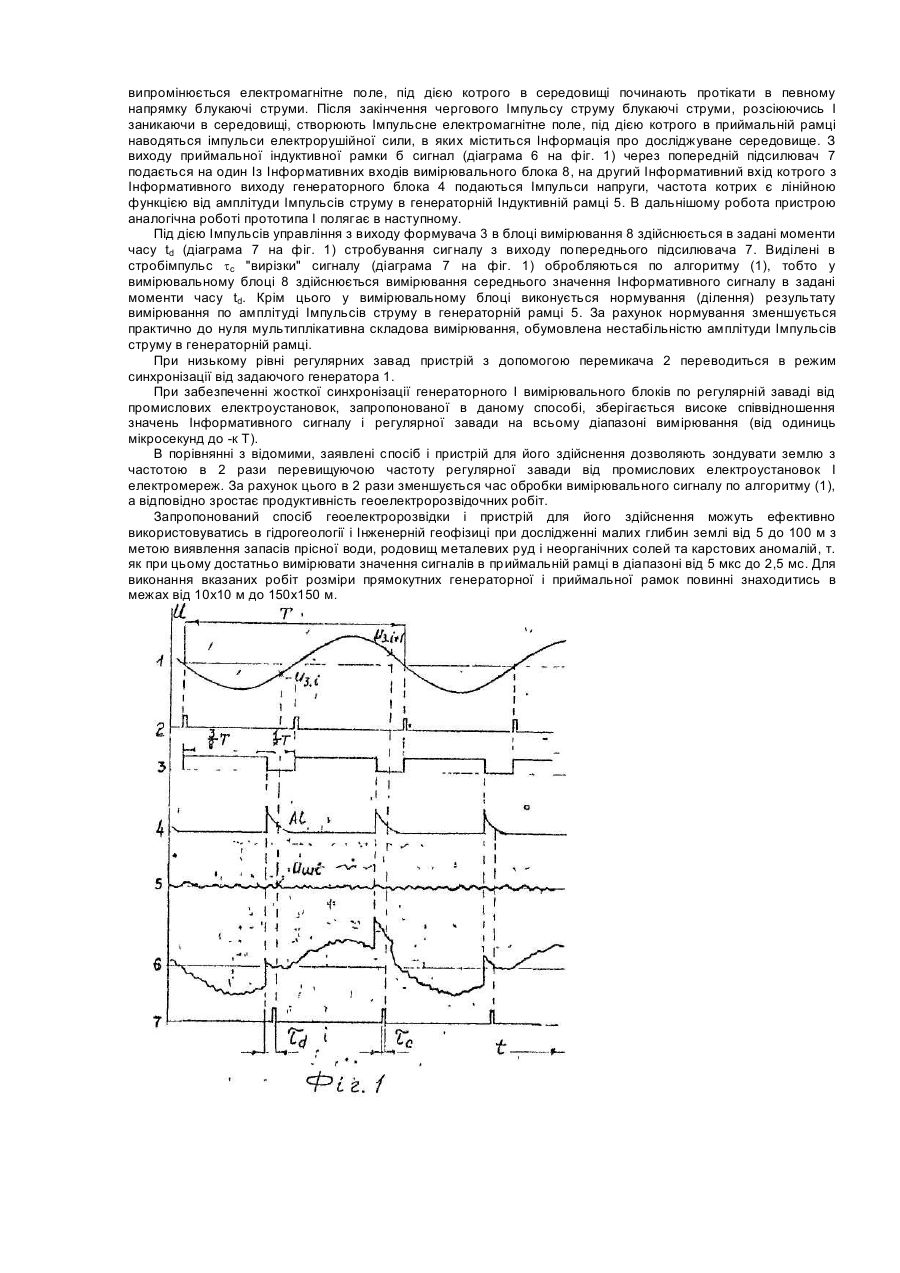
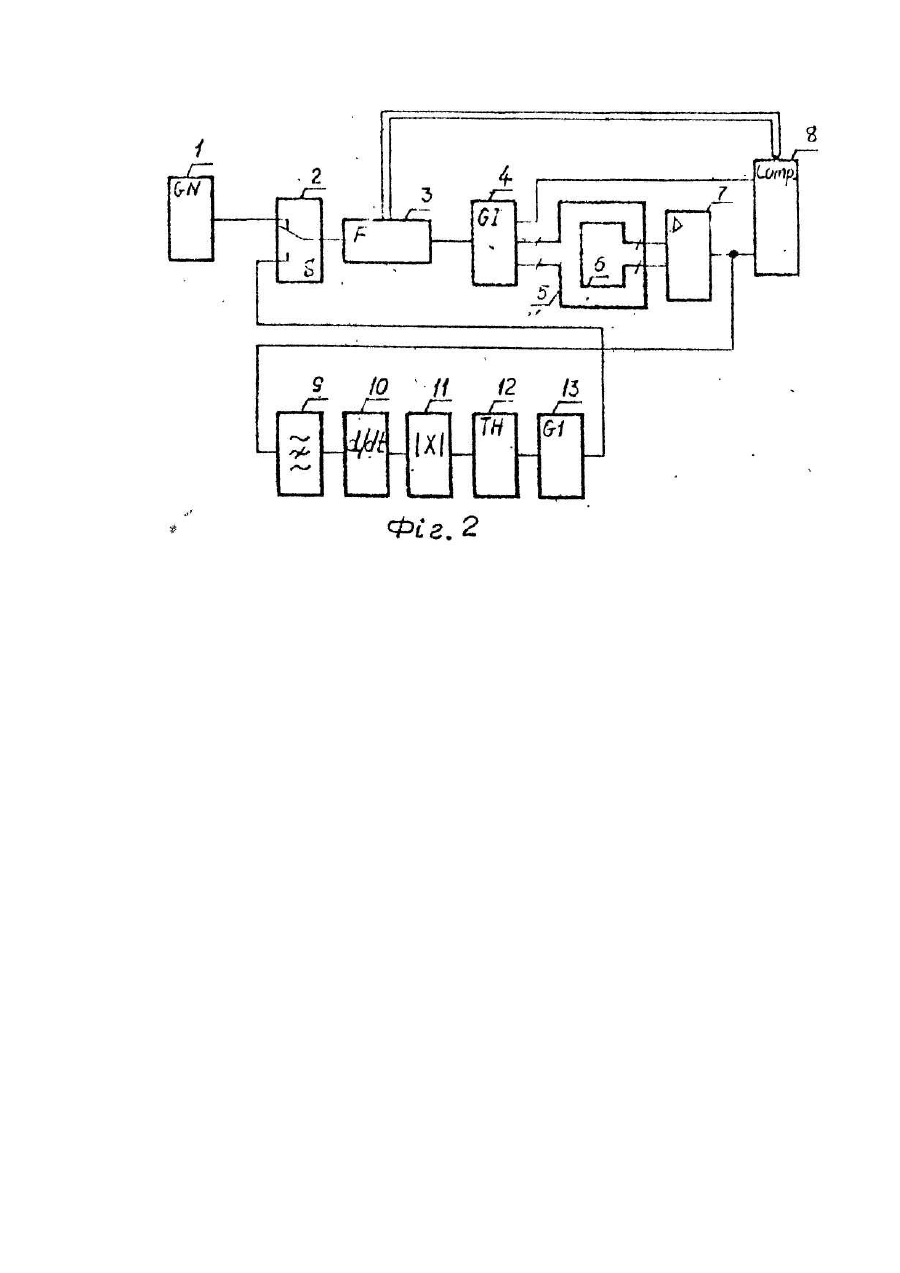
Винахід відноситься до області дослідження різноманітних середовищ, об'єктів І матеріалів з допомогою фізичних зондуючих полів, призначений для Імпульсного індуктивного зондування малих глибин Землі І може бути використаний при вирішенні задач Інженерної геофізики, пошуку ґрунтових вод і карстових пустот методом несталих полів. Відомий спосіб геоелектророзвідки, що полягає в збудженні в досліджуваному середовищі імпульсного електромагнітного поля шляхом пропускання в генераторній Індуктивній рамці біполярних прямокутних Імпульсів струму з частотою кратною частоті регулярної завади від ліній високовольтних електропередач, вимірюванні в задані моменти часу після закінчення Імпульсів струму значень заникаючих імпульсів електрорушійної сили, наведеної в приймальній індуктивній рамці при розсіюванні в середовищі зорієнтованих під дією первинного електромагнітного поля блукаючих струмів І визначенні по результатах вимірювання характеристик середовища. Для здійснення цього способу відомий пристрій, що містить генераторну І приймальну Індуктивні рамки, генератор біполярних Імпульсів струму, попередній підсилювач, стробуючий елемент, керований Імпульсний підсилювач, блок вибірки і зберігання, диференційний накопичувач, перемикач режиму роботи, подільник, формувач Імпульсів управління, перетворювач напруги в інтервали часу, і шину опорної напруги [1]. З допомогою пристрою, що реалізує вказаний спосіб, забезпечується можливість вимірювання електрорушійної сили в приймальній Індуктивній рамці та її відношення до амплітуди Імпульсів струму в генераторній рамці в часовому Інтервалі від 15 мкс до 5 мс в паузі між імпульсами струму. Недоліками відомового способу і пристрою для його здійснення є те, що в них не передбачена можливість синхронізації генераторного І вимірювального блоків по частоті І фазі промислової завади, наведеної в приймальній рамці електромагнітним полем високовольтних ліній електропередач та Інших промислових силових установок. За рахунок цього звужується діапазон підсилення малих значень інформативних сигналів на фоні регулярних завад І знижується точність вимірювання,1 а відповідно І точність визначення характеристик досліджуваного середовища. Найближчим по технічній суті 1 вирішувальній задачі є спосіб, при якому перед початком пропускання струму в генераторній Індуктивній рамці і вимірюванні значень електрорушійної сили в приймальній індуктивній рамці після його виключення, вимірюють період регулярної завади з приймальної індуктивної рамки 1 визначають моменти її переходу через нуль; по результатах вимірювань параметрів завади до включення струму методом екстрополяції визначають моменти переходу через нуль промислової періодичної завади під час пропускання струму в генераторній індуктивній рамці І після його виключення, чим забезпечується можливість вимірювання значень електрорушійної сили перехідного процесу в приймальній рамці після виключення струму в моменти переходу через нуль регулярної промислової завади [2]. Для реалізації цього способу геоелектророзвідки відомий пристрій, що містить генераторний І вимірювальний блоки, генераторну 1 приймальну індуктивні рамки, попередній підсилювач І блок управління, причому входи управління генераторного І вимірювального блоків під'єднані до виходів блоку управління, до виходу генераторного блока приєднана генераторна індуктивна рамка, приймальна індуктивна рамка приєднана до першого входу вимірювального блоку через попередній підсилювач, а другий вхід вимірювального блоку з'єднаний з Інформативним виходом генераторного блоку. Спосіб і пристрій для його реалізації забезпечують вимірювання значень інформативного сигналу в діапазоні від 0,04 до 100 мс; До недоліків прототипу слід віднести те, що методом екстрополяції практично неможливо точно визначити заздалегідь моменти переходу через нуль регулярної завади на певне значення періодів.. Крім цього при такому способі суттєво знижується вплив регулярної завади лише в одній точці вимірювань. Цей спосіб мало ефективний при побудові багатоканальної апаратури для одночасного вимірювання миттєвих значень електрорушійної сили на різних фіксованих затримках, тому що в цьому випадку будуть виникати ситуації, коли значення завади буде значно перевищувати значення сигналу. Задачею винаходу є підвищення точності і завадостійкості геоелектророзвідки малих глибин при наявності регулярних завад від ліній електропередач І Інших промислових електроустановок та створення відповідного технічного засобу для її фізичного вирішення. Суттю заявленого способу геоелектророзвідки малих глибин є те, що перед збудженням в досліджуваному середовищі первинного електромагнітного поля шляхом пропускання в генераторній Індуктивній рамці прямокутних Імпульсів струму, вимірювання в задані моменти часу в паузах між імпульсами первинного електромагнітного поля значень електрорушійної сили, наведеної в приймальній індуктивній рамці вторинним електромагнітним полем, збудженим протікаючими блукаючими струмами середовища і визначенням по результатах вимірювання його характеристик, додатково визначають моменти переходу через нуль регулярної завади від ліній електропередач, визначені моменти використовуються як початок збудження первинного електромагнітного поля тривалістю рівною 3/8 частинам періоду регулярної завади, а тривалість паузи між Імпульсами первинного поля складає 3/8 частину періода регулярної завади, суттю заявленого технічного рішення для здійснення способу геоелектророзвідки малих глибин є те, що він, складаючись з задаючого генератора, формувача імпульсів управління, генераторного блока, генераторної І приймальної індуктивних рамок попереднього підсилювача і виміровального блока, причому до першого І другого виходів формувача імпульсів управління приєднані входи управління генераторного та вимірювального блоків, до сигнального виходу генераторного блока під'єднана генераторна рамка, до приймальної Індуктивної рамки підключені послідовно з'єднані попередній підсилювач і вимірювальний блок, до другого Інформативного входу котрого під'єднаний інформативний вихід генераторного блока, додатково містить перемикач і послідовно з'єднані полосовий фільтр, диференціюючий елемент, випрямляч, піковий детектор і одновібратор, причому перший І другий входи перемикача під'єднані відповідно до виходу задаючого генератора і виходу одновібратора, а вхід полосового фільтра приєднаний до виходу попереднього підсилювача. Додатково введені в спосіб геоелектророзвідки малих глибин нові операції, а в пристрій для його здійснення елементи використовуються в різних способах І пристроях обробки інформативних сигналів, але окремо вони не володіють властивостями, які забезпечили б вирішення поставленої задачі. Такими властивостями володіє лише їх запропонована сукупність, тобто, вступаючи у взаємодію признаки сукупності надають заявленим способу і пристрою нову якість, яка відповідає критерію "суттєві відмінності". На фіг. 1 приведені епюри сигналів, що пояснюють суть заявленого способу; на фіг. 2 - структурна схема пристрою для його здійснення. Пристрій складається Із задаючого генератора 1, перемикача 2, формувача імпульсів управління 3, генераторного блока 4, генераторної Індуктивної рамки 5, приймальної Індуктивної рамки б, попереднього підсилювача 7, вимірювального блока 8, полосового фільтра 9, диференціюючого елемента 10, випрямляча 11, пікового детектора 12 І одновібратора 13. До виходу генератора 1 приєднаний перший вхід перемикача 2, другий вхід котрого з'єднаний з виходом одновібратора 13. Вихід перемикача 2 об'єднаний з входом формувача Імпульсів управління 3, до першого виходу котрого приєднаний вхід генераторного блока 4. До сигнального виходу генераторного блока 4 підключена генераторна індуктивна рамка 5. Приймальна індуктивна рамка 6 з'єднана Із входом попереднього підсилювача 7, Інформативний вихід генераторного блока 4 з'єднаний з першим входом вимірювального блока 8, другий вхід котрого приєднаний в місце з'єднання виходу попереднього підсилювача 7 з входом полосового фільтра 9. Вхід управління вимірювального блока 8 з'єднаний з другим виходом формувача імпульсів управління 3. До виходу полосового фільтра 9 під'єднані послідовно з'єднані диференціюючий елемент 10, випрямляч 11, піковий деректор 12 і одновібратор 13. Суть способу геоелектророзвідки малих глибин полягає в наступному. Нехай в приймальній Індуктивній рамці 6 наводиться електрорушійна сила регулярної завади від ліній електропередач, показана на діаграмі 1 на фіг. 1, де Τ - період завади. Із сигналу завади визначаються моменти переходу його через нулеву лінію (діаграма 2 на фіг. 1), котрі використовуються як сигнал початку випромінювання в досліджуване середовище Імпульсів електромагнітного поля тривалістю 3/8 *Τ (діаграма 3 на фіг. 1). Під дією імпульса електромагнітного поля в досліджуваному середовищі починають протікати в певному напрямку блукаючі струми. Після закінчення чергового Імпульса зондуючого поля блукаючі струми замикають, утворюючи в паузах між Імпульсами поля, рівній 1/8* T, нестале електромагнітне поле, під дією котрого в приймальній Індуктивній рамці наводяться Імпульси електрорушійної сили, показані на діаграмі 4 на фіг. 1. При геофізичних дослідженнях електромагнітними методами на приймальну Індуктивну рамку крім Інформативного сигналу і сигналу регулярної завади наводяться також високочастотні випадкові завади, обумовлені різноманітними електромагнітними полями неперервного і імпульсного характеру (діаграма 5 на фіг. 1). Приблизна форма сумарного сигналу, що наводиться в приймальній рамці з врахуванням регулярних і високочастотних випадкових завад показана на діаграмі 6 на фіг. 1. Результуючий сигнал після попереднього підсилення стробується. Виділені після стробування в задані моменти часу (на заданій затримці) "вирізки" сигналу накопичуються по алгоритму де qå - результат накопичення, N - парне число накоплюваних сигналів (N = const), As - значення інформативної складової і-го сигналу (діаграма 4 на фіг. 1), U3.i. - миттєве значення регулярної завади в і-ій "вирізці", Uш.i. - миттєве значення високочастотної завади в 1-ій "вирізці". Так як N є парне число, то при реалізації алгоритма (1) результуюче значення N å Uз.і. ® 0 регулярної завади прямує до нуля, тобто I= 1 результуюче значення високочастотної завади придушується по відношенню до входу в ÖN раз, а результуюче значення Інформативної складової зростає в N раз (без врахування коефіцієнта 1/N). Таким чином при реалізації алгоритму (1) здійснюється накопичення значень Αι інформативного сигналу І придушення регулярної 1 високочастотних завад. Робота пристрою для здійснення заявленого способу полягає в наступному. Нехай з допомогою перемикача 2 вхід формувача імпульсів управління 3 з'єднаний з виходом, одновібратора 13, а в приймальній рамці 6 - результуюча електрорушійна сила регулярної І високочастотної випадкових завад. Поступаючи на вхід полосового фільтра 9, сигнал з виходу приймальної рамки 6 фільтрується від високочастотних завад підсилюється І подається на вхід диференціюючого елемента 10. на виході котрого виникає синусоїдальний сигнал регулярної завади, зміщений по фазі сигналу на виході полосового фільтра 9 (діаграма 1 на фіг. 1) на 90°, тобто амплітудні значення сигналу на виході диференціюючого елемента відповідають моментам переходу через нулеву лінію сигналом регулярної завади на виході приймальної індуктивної рамки 6. З виходу диференціюючого елемента 10 сигнал подається через випрямляч 11 на вхід пікового детектора 12, на виході котрого формується Імпульсна послідовність, показана на діаграмі 2 на фіг. 1, причому розміщення імпульсів в часі відповідає моментам переходу сигналу регулярної завади на виході приймальної рамки 6 через нулеву лінію. Під дією імпульсної послідовності з виходу пікового деректора 12 на виході одновібратора 13 виробляється потік Імпульсів тривалістю 3/8*T паузами між ними тривалістю 1/8*Т. Імпульсна послідовність з виходу одновібратора 13 через перемикач 2 подається на вхід формувача Імпульсів управління 3. На першому виході формувача Імпульсів управління теж виникає послідовність Імпульсів тривалістю 3/8*Τ паузою рівною 1/8*Т, яка поступає на вхід генераторного блока 4. В результаті, з виходу генераторного блока 4 в генераторну Індуктивну рамку 5 подаються прямокутні імпульси струму тривалістю 3/8*Т. При протіканні в генераторній рамці 5 Імпульсів струму в досліджуване середовище випромінюється електромагнітне поле, під дією котрого в середовищі починають протікати в певному напрямку блукаючі струми. Після закінчення чергового Імпульсу струму блукаючі струми, розсіюючись І заникаючи в середовищі, створюють Імпульсне електромагнітне поле, під дією котрого в приймальній рамці наводяться імпульси електрорушійної сили, в яких міститься Інформація про досліджуване середовище. З виходу приймальної індуктивної рамки б сигнал (діаграма 6 на фіг. 1) через попередній підсилювач 7 подається на один Із Інформативних входів вимірювального блока 8, на другий Інформативний вхід котрого з Інформативного виходу генераторного блока 4 подаються Імпульси напруги, частота котрих є лінійною функцією від амплітуди Імпульсів струму в генераторній Індуктивній рамці 5. В дальнішому робота пристрою аналогічна роботі прототипа І полягає в наступному. Під дією Імпульсів управління з виходу формувача 3 в блоці вимірювання 8 здійснюється в задані моменти часу td (діаграма 7 на фіг. 1) стробування сигналу з виходу попереднього підсилювача 7. Виділені в стробімпульс tc "вирізки" сигналу (діаграма 7 на фіг. 1) обробляються по алгоритму (1), тобто у вимірювальному блоці 8 здійснюється вимірювання середнього значення Інформативного сигналу в задані моменти часу td. Крім цього у вимірювальному блоці виконується нормування (ділення) результату вимірювання по амплітуді Імпульсів струму в генераторній рамці 5. За рахунок нормування зменшується практично до нуля мультиплікативна складова вимірювання, обумовлена нестабільністю амплітуди Імпульсів струму в генераторній рамці. При низькому рівні регулярних завад пристрій з допомогою перемикача 2 переводиться в режим синхронізації від задаючого генератора 1. При забезпеченні жосткої синхронізації генераторного І вимірювального блоків по регулярній заваді від промислових електроустановок, запропонованої в даному способі, зберігається високе співвідношення значень Інформативного сигналу і регулярної завади на всьому діапазоні вимірювання (від одиниць мікросекунд до -к Т). В порівнянні з відомими, заявлені спосіб і пристрій для його здійснення дозволяють зондувати землю з частотою в 2 рази перевищуючою частоту регулярної завади від промислових електроустановок І електромереж. За рахунок цього в 2 рази зменшується час обробки вимірювального сигналу по алгоритму (1), а відповідно зростає продуктивність геоелектророзвідочних робіт. Запропонований спосіб геоелектророзвідки і пристрій для його здійснення можуть ефективно використовуватись в гідрогеології і Інженерній геофізиці при дослідженні малих глибин землі від 5 до 100 м з метою виявлення запасів прісної води, родовищ металевих руд і неорганічних солей та карстових аномалій, т. як при цьому достатньо вимірювати значення сигналів в приймальній рамці в діапазоні від 5 мкc до 2,5 мс. Для виконання вказаних робіт розміри прямокутних генераторної і приймальної рамок повинні знаходитись в межах від 10x10 м до 150x150 м.
ДивитисяДодаткова інформація
Автори англійськоюDrabych Petro Petrovych, Yavorskyi Ihor Mykolaiovych
Автори російськоюДрабич Петр Петрович, Яворский Игорь Николаевич
МПК / Мітки
МПК: G01V 3/08
Мітки: спосіб, здійснення, пристрій, геоелектророзвідки, глибин, малих
Код посилання
<a href="https://ua.patents.su/4-17769-sposib-geoelektrorozvidki-malikh-glibin-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб геоелектророзвідки малих глибин і пристрій для його здійснення</a>
Спосіб геоелектророзвідки і пристрій для його здійснення
Номер патенту: 10564
Опубліковано: 25.12.1996
Автори: Яворський Ігор Миколайович, Петровський Альберт Леонідович, Драбич Петро Петрович, Шамотко Володимир Іванович
МПК: G01V 3/02
Мітки: пристрій, здійснення, спосіб, геоелектророзвідки
Формула / Реферат:
1. Спосіб геоелектророзвідки, при якому в досліджуваному середовищі збуджують первинне електромагнітне поле шляхом пропускання в генераторній індуктивній рамці біполярних прямокутних імпульсів струму, вимірюють в задані моменти часу в паузах між імпульсами струму значення електрорушійної сили, наведеної в приймальній рамці затікаючими блукаючими струмами середовища і по результатах вимірювання визначають його властивості, який відрізняється...
Спосіб вимірювання температури термопарою і пристрій для його здійснення
Номер патенту: 12392
Опубліковано: 02.12.1996
Автори: Санніков Володимир Юрійович, Скрипник Юрій Олексійович, Кондрашов Сергій Іванович, Дубровний Віктор Опанасович
МПК: G01K 7/02
Мітки: температури, спосіб, вимірювання, пристрій, термопарою, здійснення
Формула / Реферат:
1. Спосіб вимірювання температури термопарою, суть якого у внесенні робочого кінця термопари в середовище, температуру якого вимірюють, регістрації термо-ЕРС на вільних кінцях термопари, нагріванні робочого кінця термопари пропусканням через термопару електричного струму і визначенні температури за формулою, який відрізняється тим, що пропускання електричного струму через термопару здійснюють протягом заданого часу, який вибирають в...
Пристрій для геоелектророзвідки

Номер патенту: 8419
Опубліковано: 29.03.1996
Автори: Мороз Іван Петрович, Дешиця Степан Андрійович, Сапужак Ярослав Станіславович, Білінський Анатолій Іванович
МПК: G01V 3/10
Мітки: пристрій, геоелектророзвідки
Формула / Реферат:
Устройство для геоэлектроразведки, содержащее генераторную цепь, состоящую из последовательно соединенных кварцевого генератора, делителя частоты, усилителя мощности и передающего датчика, и измерительную цепь, состоящую из последовательно соединенных кварцевого генератора, делителя частоты, амплитудно-фазового измерителя с приемным датчиком на входе, отличающееся тем, что, с целью повышения точности измерения за счет исключения ошибок,...
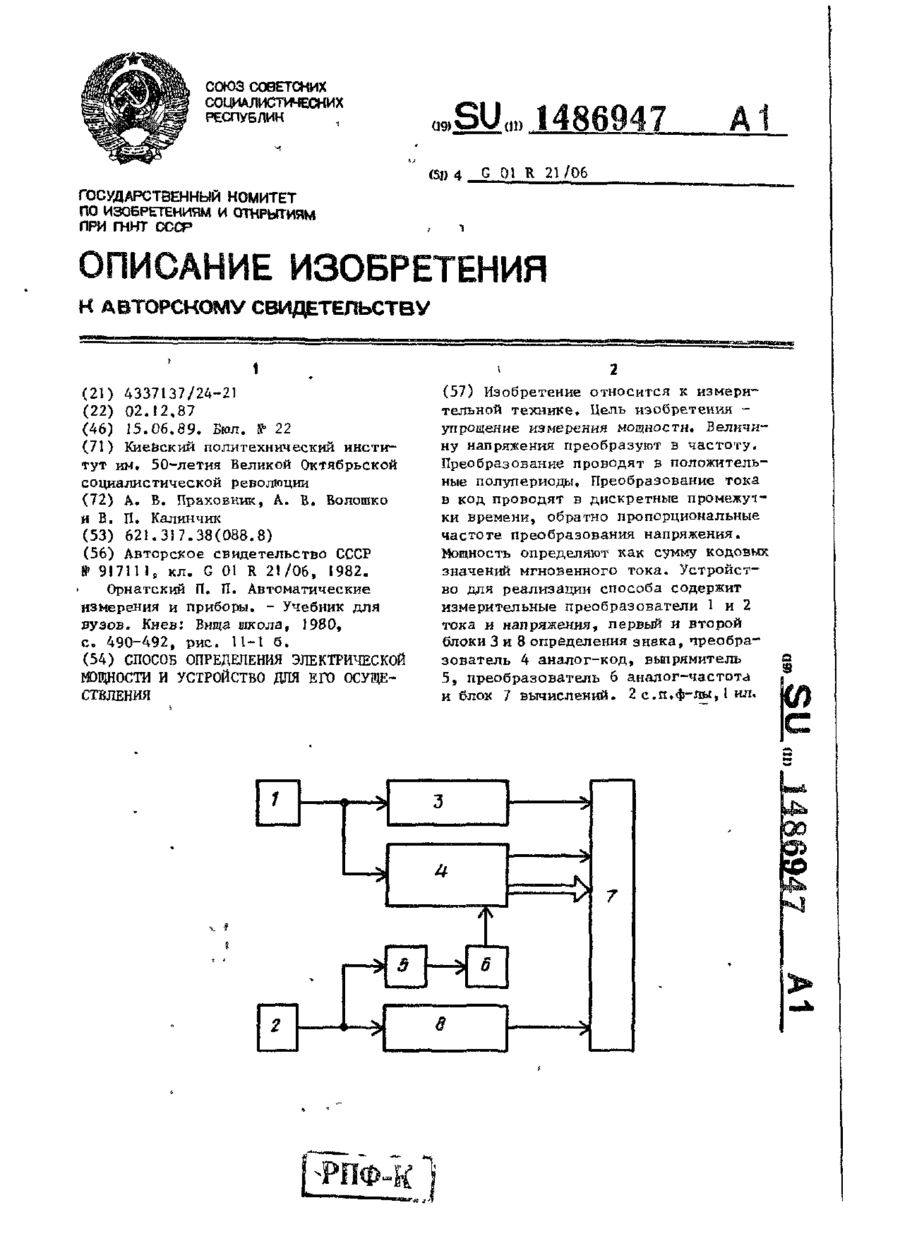
Спосіб визначення електричної потужності та пристрій для його здійснення
Номер патенту: 14063
Опубліковано: 25.04.1997
Автори: Праховник Артур Веніамінович, Волошко Анатолій Васильович, Калінчик Василь Прокопович
МПК: G01R 21/06
Мітки: здійснення, електричної, потужності, спосіб, пристрій, визначення
Формула / Реферат:
1. Способ определения электрической мощности, заключающийся в том, что измеряют мгновенные значения тока и преобразуют их в код, отличающийся тем, что, с целью упрощения измерения мощности, величину напряжения в положительные полупериоды преобразуют в частоту fi, осуществляют преобразование тока в код в дискретные промежутки времени Dti = 1/f1, a мощность определяют по формулегде К - постоянный коэффициент;Т - период...
Спосіб реєстрації температури поверхні прокату та пристрій для його здійснення
Номер патенту: 939
Опубліковано: 15.12.1993
Автори: Брежнєв Леонід Іванович, Бельский Олег Іванович
Мітки: пристрій, температури, спосіб, прокату, здійснення, реєстрації, поверхні
Формула / Реферат:
1. Способ регистрации температуры поверхности проката, заключающийся в измерении и запоминании максимального значения прерываемого сигнала температуры излучения и регистрации температуры, отличающийся тем, что, с целью улучшения качества контроля нагрева металла для станов, работающих с одного подогрева в едином потоке металла с блюмингом, осуществляют идентификацию сигнала температуры поверхности конца прокатки посредством контроля...
Попередній патент: Пристосування для захисту виступаючих елементів конструкцій при фарбуванні поверхонь
Наступний патент: Імітатор електромагнітних імпульсів
Випадковий патент: Спосіб виробництва харчових порошків