Спосіб формування сигналів одноканального керування літального апарата, що обертається за креном
Номер патенту: 19562
Опубліковано: 15.12.2006
Автори: Коростельов Олег Петрович, Косовенко Євген Вікторович, Кузьмін В'ячеслав Павлович, Смішко Григорій Павлович, Клявлін Валерій Володимирович
Формула / Реферат
1. Спосіб формування сигналів одноканального керування літального апарата, що обертається за креном, який включає вимірювання поточного кута крену (γ) літального апарата, оцінку кутової швидкості крену (![]() ), вироблення поправки на коректування фази сигналу (
), вироблення поправки на коректування фази сигналу (![]() ), що надходить на виконавчий рульовий привід, здійснення синусно-косинусного перетворення сигналу керування, викликаного відхиленням літального апарата від заданої траєкторії з урахуванням корекції фази сигналу керування, який відрізняється тим, що вимірюють величину сигналу, пропорційного величині відхилення (ΔΧ) літального апарата від заданої траєкторії, і лінійно посилюють його, одержуючи в результаті значення посиленого сигналу відхилення літального апарата від заданої траєкторії (Uo), задають значення поточного порогового рівня величини сигналу відхилення літального апарата від заданої траєкторії (Uo), одержуючи в результаті величину сигналу (Uпор), диференціюють величину сигналу відхилення (Uo), одержуючи в результаті величину сигналу, пропорційного градієнту величини відхилення літального апарата від заданої траєкторії (U1), інтегрують величину сигналу відхилення літального апарата від заданої траєкторії (Uo), одержуючи в результаті значення сигналу (U2), а величину одноканального результуючого сигналу (U) визначають шляхом додавання до величини сигналу відхилення літального апарата від заданої траєкторії (Uo) величини сигналу, пропорційного градієнту цього відхилення (U1), а також величини сигналу, пропорційного величині проінтегрованого сигналу від цього відхилення (U2), причому сигнал, пропорційний величині проінтегрованого сигналу відхилення літального апарата від заданої траєкторії (U2), не враховують, якщо поточне абсолютне значення сигналу відхилення літального апарата від заданої траєкторії (Uo) не перевищує значення
), що надходить на виконавчий рульовий привід, здійснення синусно-косинусного перетворення сигналу керування, викликаного відхиленням літального апарата від заданої траєкторії з урахуванням корекції фази сигналу керування, який відрізняється тим, що вимірюють величину сигналу, пропорційного величині відхилення (ΔΧ) літального апарата від заданої траєкторії, і лінійно посилюють його, одержуючи в результаті значення посиленого сигналу відхилення літального апарата від заданої траєкторії (Uo), задають значення поточного порогового рівня величини сигналу відхилення літального апарата від заданої траєкторії (Uo), одержуючи в результаті величину сигналу (Uпор), диференціюють величину сигналу відхилення (Uo), одержуючи в результаті величину сигналу, пропорційного градієнту величини відхилення літального апарата від заданої траєкторії (U1), інтегрують величину сигналу відхилення літального апарата від заданої траєкторії (Uo), одержуючи в результаті значення сигналу (U2), а величину одноканального результуючого сигналу (U) визначають шляхом додавання до величини сигналу відхилення літального апарата від заданої траєкторії (Uo) величини сигналу, пропорційного градієнту цього відхилення (U1), а також величини сигналу, пропорційного величині проінтегрованого сигналу від цього відхилення (U2), причому сигнал, пропорційний величині проінтегрованого сигналу відхилення літального апарата від заданої траєкторії (U2), не враховують, якщо поточне абсолютне значення сигналу відхилення літального апарата від заданої траєкторії (Uo) не перевищує значення
![]() ,
,
де ε - безрозмірний коефіцієнт, що характеризує допустиме відхилення літального апарата від заданої траєкторії.
2. Спосіб за п. 1, який відрізняється тим, що сигнал, пропорційний величині проінтегрованого сигналу відхилення (U2), не враховують при визначенні величини одноканального результуючого сигналу (U) при одночасному виконанні співвідношень
![]() ,
,
де ![]() – абсолютне значення величини сигналу, пропорційного величині відхилення літального апарата від заданої траєкторії, В.
– абсолютне значення величини сигналу, пропорційного величині відхилення літального апарата від заданої траєкторії, В.
3. Спосіб за пп. 1, 2, який відрізняється тим, що величину коефіцієнта, що характеризує допустиме відхилення літального апарата від заданої траєкторії (ε), приймають рівною 0,1.
Текст
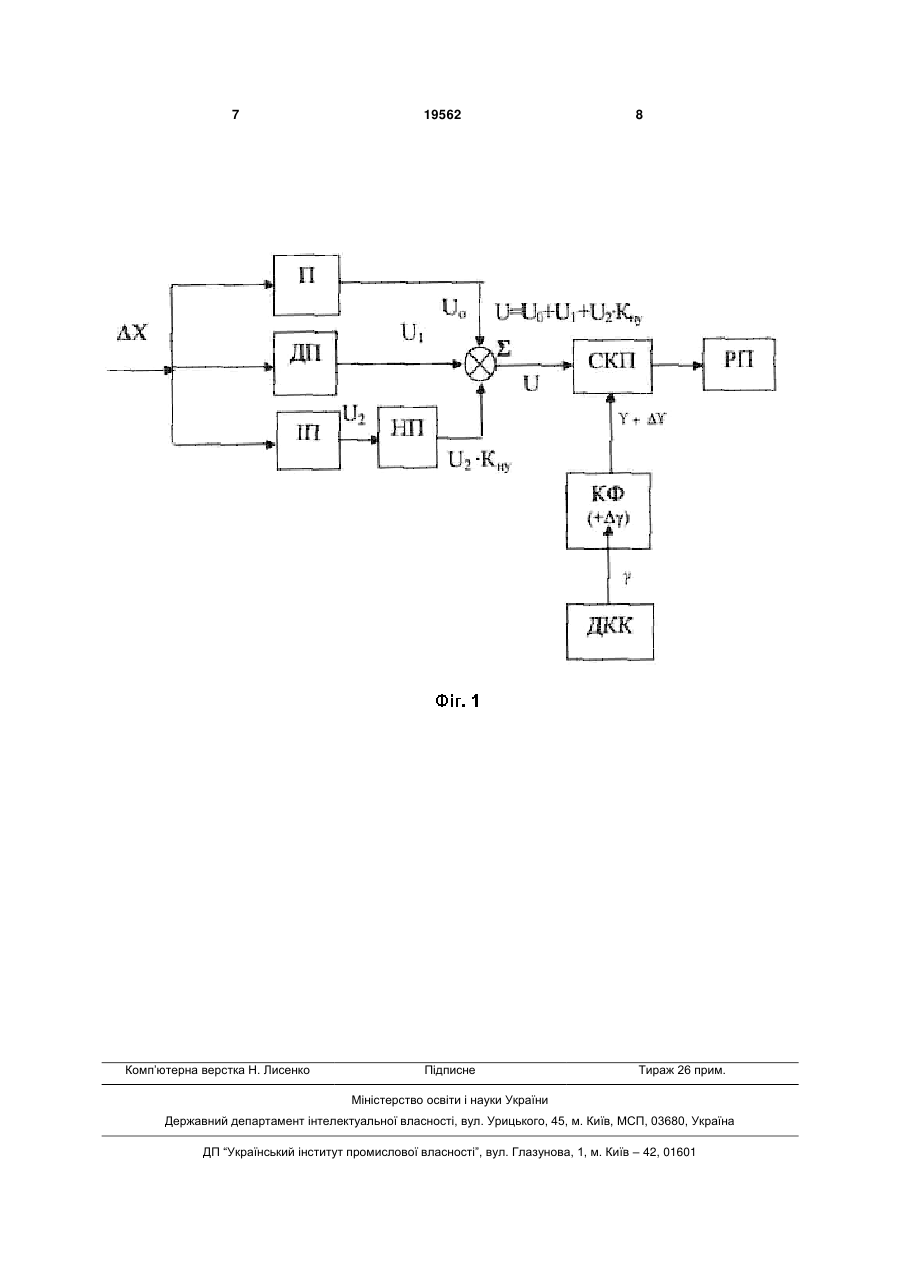
1. Спосіб формування сигналів одноканального керування літального апарата, що обертається за креном, який включає вимірювання поточного кута крену (γ) літального апарата, оцінку кутової швидкості крену ( o ), вироблення поправки на коректування фази сигналу ( ), що надходить на виконавчий рульовий привід, здійснення синуснокосинусного перетворення сигналу керування, викликаного відхиленням літального апарата від заданої траєкторії з урахуванням корекції фази сигналу керування, який відрізняється тим, що вимірюють величину сигналу, пропорційного величині відхилення (ΔΧ) літального апарата від заданої траєкторії, і лінійно посилюють його, одержуючи в результаті значення посиленого сигналу відхилення літального апарата від заданої траєкторії (Uo), задають значення поточного порогового рівня величини сигналу відхилення літального апарата від заданої траєкторії (Uo), одержуючи в результаті величину сигналу (Uпор), диференціюють величину сигналу відхилення (Uo), одержуючи в результаті величину сигналу, пропорційного градієнту величини відхилення літального апарата від заданої траєкторії (U1), інтегрують величину сигналу відхилення літального апарата від заданої 3 19562 4 кої якості процесу регулювання, необхідної швидкрену (ωо), вироблення поправки на коректування кодія, а, отже, і високої точності наведення. фази сигналу (Δγ), що поступає на виконавчий У способі [2] підвищення якості стабілізації рарульовий привод, здійснення синусно-косинусного кети при наведенні на ціль забезпечують двоканаперетворення сигналу керування, викликаного льним самоналагоджувальним автопілотом шлявідхиленням літального апарату від заданої траєкхом введення у керувальний сигнал, що поступає торії з урахуванням корекції фази сигналу керуна привод, фазового випередження. вання, новим є те, що, вимірюють величину сигнаПроте при цьому способі не оцінюється такий лу, пропорційного величині відхилення (ΔΧ) важливий параметр ракети, як швидкість її наблилітального апарату від заданої траєкторії, і лінійно ження до заданої траєкторії, який, поза сумнівом, посилюють його, одержуючи в результаті значення здійснює вплив на фазу і амплітуду відхилення посиленого сигналу відхилення літального апарату руля. Внаслідок цього неможливо забезпечити від заданої траєкторії (Uo), задають значення повисоку динаміку процесу керування і якість перехіточного порогового рівня величини сигналу відхидних процесів. Крім того, спосіб [2] не припускає лення літального апарату від заданої траєкторії його реалізацію при одноканальному автопілоті. (Uo), одержуючи в результаті величину сигналу У способі аналога [3] запропонована система (Uпор), диференціюють величину сигналу відхикерування літальним апаратом, що обертається, лення (Uo), одержуючи в результаті величину сигна основі регулятора змінної структури. Дійсно, налу, пропорційного градієнту величини відхиленвикористання регулятора змінної структури, на ня літального апарату від заданої траєкторії (U1), вхід якого поступає сигнал, пропорційний відхиінтегрують величину сигналу відхилення літальноленню ракети від заданої траєкторії, дозволяє го апарату від заданої траєкторії (Uo), одержуючи в більш точно оцінювати фазовий стан процесу ререзультаті значення сигналу (U2), а величину одгулювання, а також враховувати не тільки значенноканального результуючого сигналу (U) визначаня відхилення, але і непрямим чином швидкість ють шляхом додавання до величини сигналу відйого зміни. хилення літального апарату від заданої траєкторії Недоліком системи керування за способом (Uo) величини сигналу, пропорційного градієнту аналога [3] є підвищена складність її реалізації цього відхилення (U1), а також величини сигналу, унаслідок великої кількості функціональних елепропорційного величині проінтегрованого сигналу ментів, що використовуються. Крім того, в системі від цього відхилення (U2), причому сигнал, пропокерування відсутній пристрій корекції фази, що рційний величині проінтегрованого сигналу відхипідвищує вимоги до швидкодії приводу. лення літального апарату від заданої траєкторії Як найближчий аналог (прототип) вибраний (U2), не враховують, якщо поточне абсолютне знаспосіб формування сигналів керування боєприпачення сигналу відхилення літального апарату від су, що обертається за креном [4]. Спосіб прототизаданої траєкторії (Uo) не перевищує значення пу [4] дозволяє уводити необхідне фазове випереε.Uпор, де ε – безрозмірний коефіцієнт, що характедження (Δγ), залежне від частоти обертання ризує допустиме відхилення літального апарату безпілотних літальних апаратів за креном, у виковід заданої траєкторії. навчий елемент системи керування - рульовий Сигнал, пропорційний величині проінтегровапривод - як при двоканальному, так і при одноканого сигналу відхилення (U2), не враховують при нальному керуванні. визначенні величини одноканального результуюПроте структура сигналів керування по тангачого сигналу (U) при одночасному виконанні співжу і рисканню способу прототипу [4] аналогічна відношень структурі сигналів, що використовуються у спосоUo Uпор, Uo U1 0, Uo U2 0 , бах [1, 2]. Це, у свою чергу, не дозволяє забезпеде Uo – абсолютне значення величини сигчити високі динамічні характеристики і якість перехідних процесів в замкнутому контурі керування, і, налу, пропорційного величині відхилення літальотже, не дозволяє отримати високу точність навеного апарату від заданої траєкторії, В. дення. Величину коефіцієнта, що характеризує допуВ основу корисної моделі поставлена задача стиме відхилення літального апарату від заданої підвищення точності наведення безпілотного літатраєкторії (ε), приймають рівною 0,1. льного апарату (ракети), що обертається за креПерераховані ознаки способу складають сутном, і який наводиться у лазерному промені, шляність корисної моделі. хом підвищення якості функціонування і Наявність причинно-наслідкового зв'язку між поліпшення швидкодії контура керування безпілосукупністю істотних ознак корисної моделі і технічтного літального апарату, що досягається за рахуним результатом, що досягається, полягає у нанок врахування у структурі керувального сигналу ступному. спектру сигналів (величин сигналів), які додатково Уведення сигналу, пропорційного градієнту вводяться, а саме сигналу, пропорційного відхивеличини сигналу відхилення (ΔΧ) літального апаленню літального апарату від заданої траєкторії, рату від заданої траєкторії (розузгодження), у кесигналу, пропорційного його градієнту, а також рувальний сигнал системи керування істотно підсигналу, пропорційного інтегралу від нього. вищує її швидкодію, а також забезпечує необхідні Вказана задача досягається тим, що у способі запаси стійкості як по амплітуді, так і по фазі. формування сигналів одноканального керування У свою чергу, використання сигналу, пропорлітального апарату, що обертається за креном, ційного інтегралу від величини сигналу відхилення який включає вимірювання поточного кута крену (ΔΧ) літального апарату від заданої траєкторії, (γ) літального апарату, оцінку кутової швидкості зменшує статичну помилку при відробітку поточно 5 19562 6 го розузгодження (ΔΧ) шляхом внесення астатизналу, пропорційного величині відхилення літальма в систему керування. ного апарату від заданої траєкторії (ΔΧ), В. Для збільшення швидкодії при малих розузгоТаким чином, сигнал, пропорційний величині дженнях (ΔΧ), сумірних з амплітудою виникаючих проінтегрованого сигналу від розузгодження (U2), шумів, і при русі центру мас ракети у бік подальне враховують, коли абсолютне значення величишого зменшення розузгодження, інтегратор відкни сигналу розузгодження Uo не перевищує 10% лючають. Це перешкоджає "затягуванню" (збільвід максимальної величини сигналу розузгодження шенню тривалості) перехідних процесів при (Uпор), а знак величини сигналу розузгодження (Uo) відпрацюванні управляючих сигналів, підвищує є протилежним знаку його градієнта розузгоджендемпфування і швидкодію, а також знижує коливаня (U1), але співпадає із знаком величини проінтельність перехідних процесів у системах керування. груваного сигналу розузгодження (U2). Структурна схема системи керування літальПісля цього сформований керувальний сигнал ним апаратом, за допомогою якої реалізується (U) подають на синусно-косинусний перетворювач пропонований спосіб, показана на Фіг.1. Вона (СКП), за допомогою якого виробляють команди включає розташовані паралельно підсилювач (П), керування на рульовий привод (РП) з урахуванням диференціюючий пристрій (ДП) і інтегруючий притого, що вводиться у процесі польоту в коректорі стрій (ІП), а також нелінійний підсилювач (НП), фази (КФ) змінного значення фазового випересуматор (Σ), синусно-косинусний перетворювач дження Δγ, яке залежить від частоти обертання (СКП), коректор фази (КФ) датчик кута крену (ДКК) безпілотного літального апарату за креном (γ – і рульовий привод (РП). поточний кут крену). Спосіб реалізують за допомогою вищеописаПринцип роботи коректора фази (КФ) полягає ної схеми таким чином. в наступному. У польоті при обертанні ракети датВимірюють величину сигналу, пропорційного чик кута крену (ДКК) видає поточне значення кута величині відхилення (ΔΧ) літального апарату від крену o t , де ωо – кутова швидкість крену, t – заданої траєкторії (тобто розузгодженню), і лінійно час. Аналізатор кутової швидкості (на Фіг.1 не попосилюють його, набуваючи в результаті значення казано) по сигналу γ визначає кутову швидкість ωо посиленого сигналу розузгодження (Uo). й у відповідності з таблицею виправлень (не покаЗадають значення поточного порогового рівня зано) видає сигнал з корекції фази у синусно(Uпор) величини сигналу розузгодження (Uo), тобто косинусний перетворювач (СКП). значення Uпор пропорційно максимальному знаПри малих помилках величини розузгодження ченню величини сигналу розузгодження ΔΧ на синусно-косинусний перетворювач (СКП) (ΔΧmax=2,5м). подають керувальний сигнал, рівний U=U0+U1 Після цього диференціюють величину сигналу (тобто U2=0). розузгодження (Uo), одержуючи в результаті велиТаким чином, структура керувального сигналу чину сигналу, пропорційного градієнту величини (U), що змінюється, дозволяє забезпечити високу розузгодження (U1), а також інтегрують величину швидкодію і задану якість керування, а отже, і висигналу розузгодження (Uo), набуваючи в резульсоку точність наведення. таті значення сигналу (U2). Пропонованій спосіб формування сигналів одОдноканальний результуючий (керувальний) ноканального керування безпілотного літального сигнал (U) визначають шляхом додавання до веапарату, що обертається за креном, був апроболичини сигналу розузгодження (Uo) величини сигваний на макетних зразках на стенді при виконанні налу, пропорційного градієнту цього відхилення ДКР у державному підприємстві "ДержККБ "Луч" (U1), а також величини сигналу, пропорційного протягом 2005-2006р.р., і показав високу ефективвеличині проінтегрованого сигналу від цього відність і надійність, а також дозволив забезпечити хилення (U2). високу точність наведення безпілотних літальних Причому сигнал, пропорційний величині проінапаратів. тегрованого сигналу розузгодження (U2), не врахоДжерела інформації: вують, якщо поточне значення сигналу відхилення 1. Способ формирования команд управления літального аппарату від заданної траєкторії (Uo) вращающейся ракетой, наводящейся по лучу, и при визначеному полярностей сигналів Uo, U1 і U2 устройство для его осуществления. RU не перевующує значення №97103073, 1999. МПК8 F41G7/00, F41G7/24. Uпор , 2. Двухканальный самонастраивающийся авде ε – коефіцієнт, що характеризує допустиме топилот для вращающейся по крену ракеты RU відхилення літального апарату від заданої траєк№2177170, 2001. МПК8 G05D1/00, В64С13/02. торії (приймають ε=0,1). 3. Система керування обертовим літальним тобто керувальний сигнал (U) формують по аппаратом. UA №64669А, 2004. МПК8 F42B15/01. слідуючій залежності: 4. Способ формирования сигналов управлеU Uo U2 K ну U2 , ния вращающегося по крену боеприпаса и способ де Кну – коефіцієнт посилення сигналу нелінійего изготовления. RU №2235284, 2004. МПК8 ного підсилювача (НП), який формують згідно із F42B15/00. законом: 5. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування і систе0, якщо Uo Uпор,Uo U1 0, Uo U2 0 Kну , ма керування. UA №49095, 2005. МПК8 F42B15/01. 1 в іншому випадку , де Uo – абсолютне значення величини сиг 7 Комп’ютерна верстка Н. Лисенко 19562 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for formation of signals of single-channel control of aircraft rotating by roll
Автори англійськоюKorosteliov Oleh Petrovych, Kuzmin Viacheslav Pavlovych, Clyavlin Valeriy Volodymyrovich, Kosovenko Yevhen Viktorovych, Smishko Hryhorii Pavlovych
Назва патенту російськоюСпособ формирования сигналов одноканального управления летательного аппарата, который вращается по крену
Автори російськоюКоростелев Олег Петрович, Кузьмин Вячеслав Павлович, Клявлин Валерий Владимирович, Косовенко Евгений Викторович, Смишко Григорий Павлович
МПК / Мітки
МПК: F42B 15/00, F42B 15/01
Мітки: одноканального, апарата, спосіб, формування, сигналів, літального, керування, обертається, креном
Код посилання
<a href="https://ua.patents.su/4-19562-sposib-formuvannya-signaliv-odnokanalnogo-keruvannya-litalnogo-aparata-shho-obertaehtsya-za-krenom.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування сигналів одноканального керування літального апарата, що обертається за креном</a>
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Бандура Іван Миколайович, Цехмейстер Олена Олексіївна, Лазоркін Юрій Юрійович, Дигало Оксана Миколаївна, Кулік Анатолій Степанович
МПК: B64D 31/00
Мітки: керування, установкою, літального, система, двигуновою, апарата
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Спосіб управління технічним станом літального апарата
Номер патенту: 69740
Опубліковано: 15.09.2004
Автори: Волошин Ігор Іванович, Семон Богдан Йосипович, Петренко Всеволод Григорович, Щербина Володимир Миколайович
МПК: G05B 13/00
Мітки: літального, спосіб, апарата, управління, станом, технічним
Формула / Реферат:
Спосіб управління технічним станом літального апарата, при якому отримують параметри технічного стану літального апарата, параметри процесу технічної експлуатації, параметри зовнішніх факторів та параметри мети технічної експлуатації, формують оператор корегування параметрів управління процесу технічної експлуатації відповідного каналу, формують команду управління виконавчим пристроєм відповідного каналу, корегують параметри процесу технічної...
Гідравлічна система керування приводами люків протипожежного літального апарата
Номер патенту: 17926
Опубліковано: 16.10.2006
Автори: Карпухіна Лариса Леонідівна, Бандура Іван Миколайович, Фірсов Сергій Миколайович
МПК: B64C 13/00
Мітки: апарата, система, літального, протипожежного, гідравлічна, керування, приводами, люків
Формула / Реферат:
Гідравлічна система керування приводами люків протипожежного літального апарата, що містить блок керування, яка відрізняється тим, що в неї введено n підсилювачів потужності і n електрогідравлічних рульових машинок, крім того, до складу кожної електрогідравлічної машинки входять вузол керування, шестеренний насос, електродвигун, кривошипно-шатунний механізм, захисні клапани.
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата
Номер патенту: 74847
Опубліковано: 15.02.2006
Автор: Єрмоленко Іван Миколайович
Мітки: апарата, двигуна, подачі, спосіб, компонентів, згоряння, літального, палива, камеру
Формула / Реферат:
Спосіб подачі компонентів палива в камеру згоряння двигуна літального апарата, що включає витіснення компонентів палива з паливних баків під дією газів, що подаються в паливні баки, який відрізняється тим, що гази подають у напрямку, тангенціальному до циліндричної бокової поверхні паливних баків.
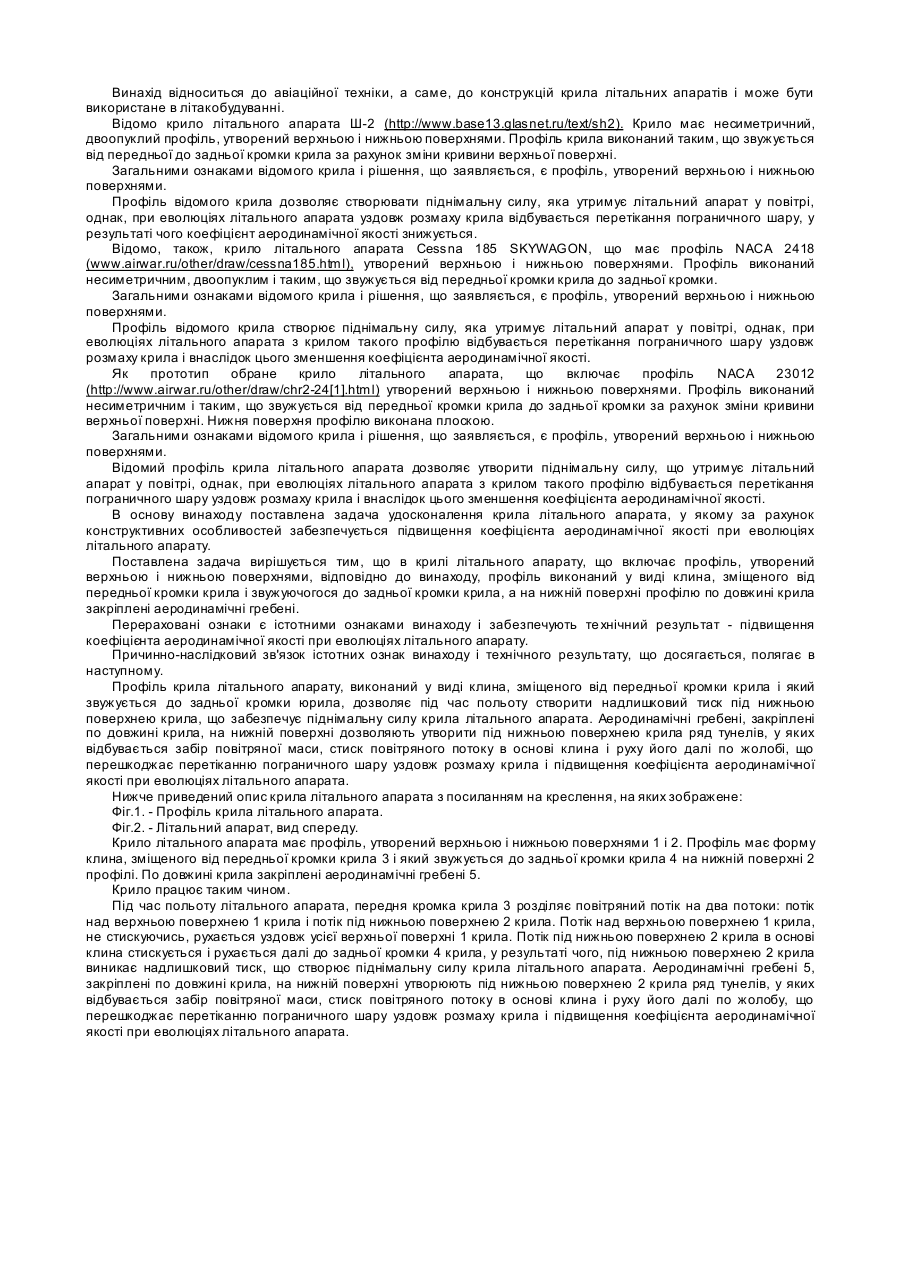
Крило літального апарата
Номер патенту: 64342
Опубліковано: 16.02.2004
Автор: Руднєв Юрій Миколайович
Мітки: літального, апарата, крило
Формула / Реферат:
Крило літального апарата, що включає профіль, утворений верхньою і нижньою поверхнями, яке відрізняється тим, що профіль виконаний у вигляді клина, зміщеного від передньої кромки крила і який звужується до задньої кромки крила, а на нижній поверхні профілю по довжині крила закріплені аеродинамічні гребені.
Попередній патент: Мазь протизапальна знеболювальна
Наступний патент: Спосіб керування і зміни аеродинамічного компонування безпілотного літального апарата
Випадковий патент: Спосіб прискорення репаративних процесів у виразкових дефектах шлунково-кишкового тракту