Екранний чотирипараметровий спосіб сумісного контролю параметрів феромагнітних трубчастих виробів
Формула / Реферат
Екранний чотирипараметровий спосіб контролю параметрів феромагнітних трубчастих виробів, який передбачає проникнення змінного збуджуючого магнітного потоку у феромагнітний трубчастий провідний виріб, а також наведення вихрової ЕРС в стінці труби, під дією якої виникають вихрові струми, що створюють магнітний потік, який складається геометрично зі збуджуючим магнітним потоком, створюючи результуючий магнітний потік Ф3t, за допомогою якого визначають магнітну індукцію B3t, що наводить ЕРС Е3t датчика, який знаходиться у внутрішній порожнині труби, при цьому результуючий магнітний потік зменшується по величині і зсувається по фазі, по відношенню до збуджуючого магнітного потоку, а все це в свою чергу приводить до згасання поля всередині труби, який відрізняється тим, що екранний ефект феромагнітної труби дає можливість визначити, за сигналами датчика всередині труби, відносну магнітну проникність ![]() , питомий електричний опір
, питомий електричний опір ![]() , коефіцієнт згасання магнітного поля ht у трубчастому виробі, з урахуванням температури t феромагнітної труби, яка теж вимірюється:
, коефіцієнт згасання магнітного поля ht у трубчастому виробі, з урахуванням температури t феромагнітної труби, яка теж вимірюється:
![]()
![]()
![]()
 ,
,
де E3t - ЕРС датчика в порожнині труби; а - зовнішній радіус трубчастого виробу; 4,44 - числовий коефіцієнт, який вказує на те, що вимірюється ефективне значення ЕРС E3t; ft - частота змінення магнітного поля з урахуванням температури; ![]() - магнітна константа,
- магнітна константа, ![]() ; Н0 - напруженість магнітного поля; Sд - площа поперечного перерізу електромагнітного датчика; Wд - число витків електромагнітного датчика; d - товщина стінки труби; b - внутрішній радіус трубчастого виробу;
; Н0 - напруженість магнітного поля; Sд - площа поперечного перерізу електромагнітного датчика; Wд - число витків електромагнітного датчика; d - товщина стінки труби; b - внутрішній радіус трубчастого виробу; ![]() - математична константа;
- математична константа; ![]() - тангенс фазового кута зсуву магнітного потоку, який проходить всередині труби, а - температурний коефіцієнт опору матеріалу трубчастого виробу; t1 - початкова температура труби, t1 = 20°С;
- тангенс фазового кута зсуву магнітного потоку, який проходить всередині труби, а - температурний коефіцієнт опору матеріалу трубчастого виробу; t1 - початкова температура труби, t1 = 20°С; ![]() - питомий електричний опір при початковій температурі;
- питомий електричний опір при початковій температурі; ![]() - відносна магнітна проникність труби з урахуванням температури.
- відносна магнітна проникність труби з урахуванням температури.
Текст
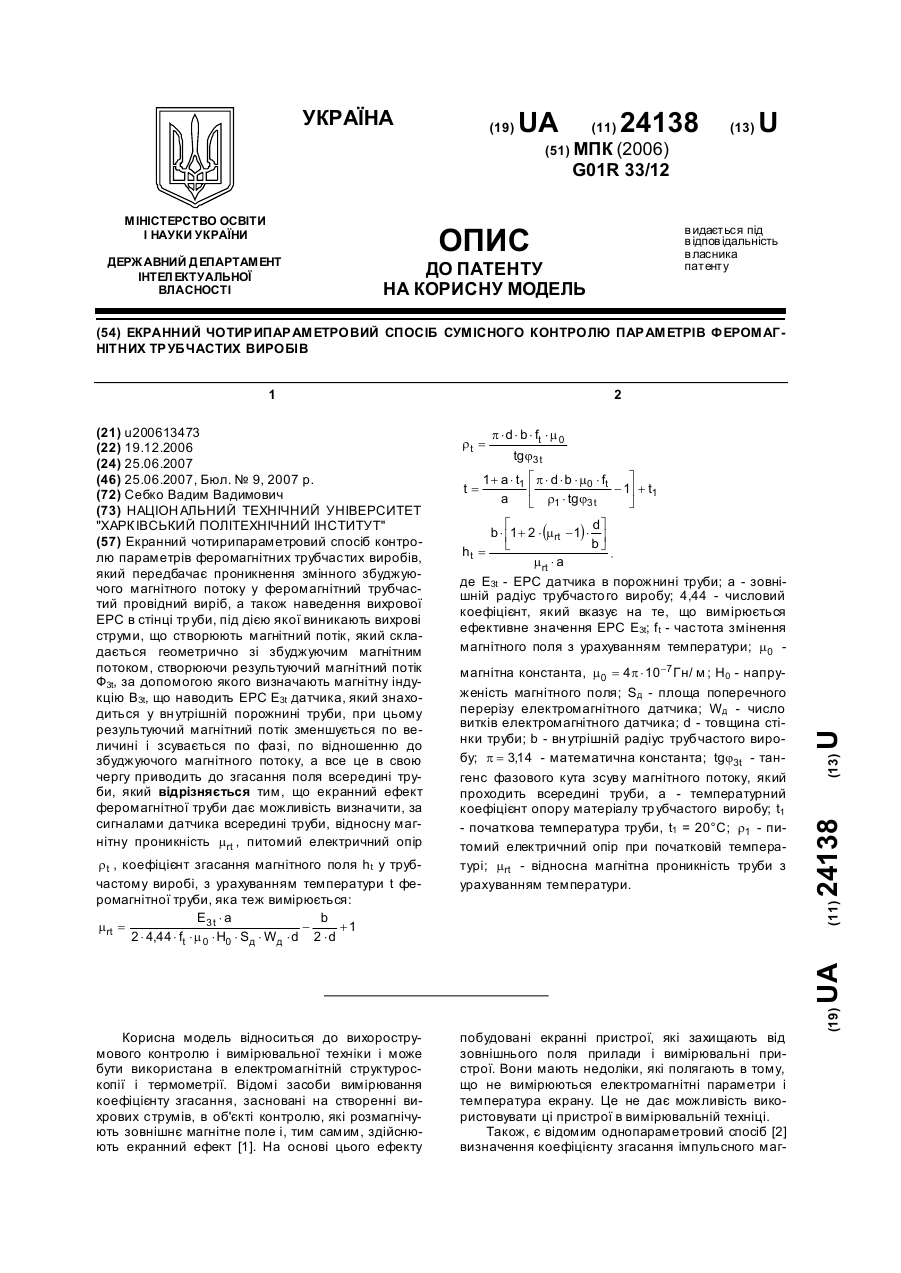
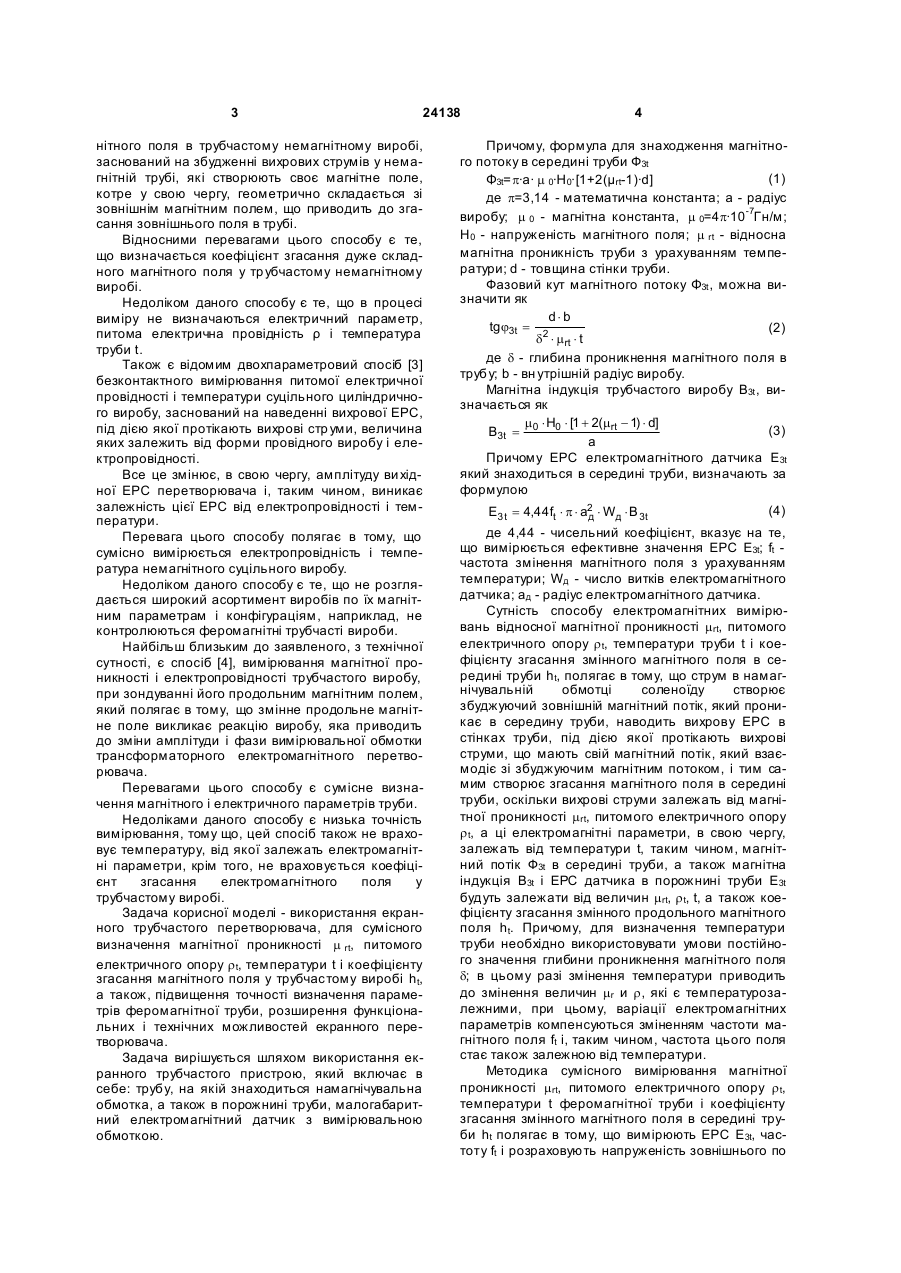
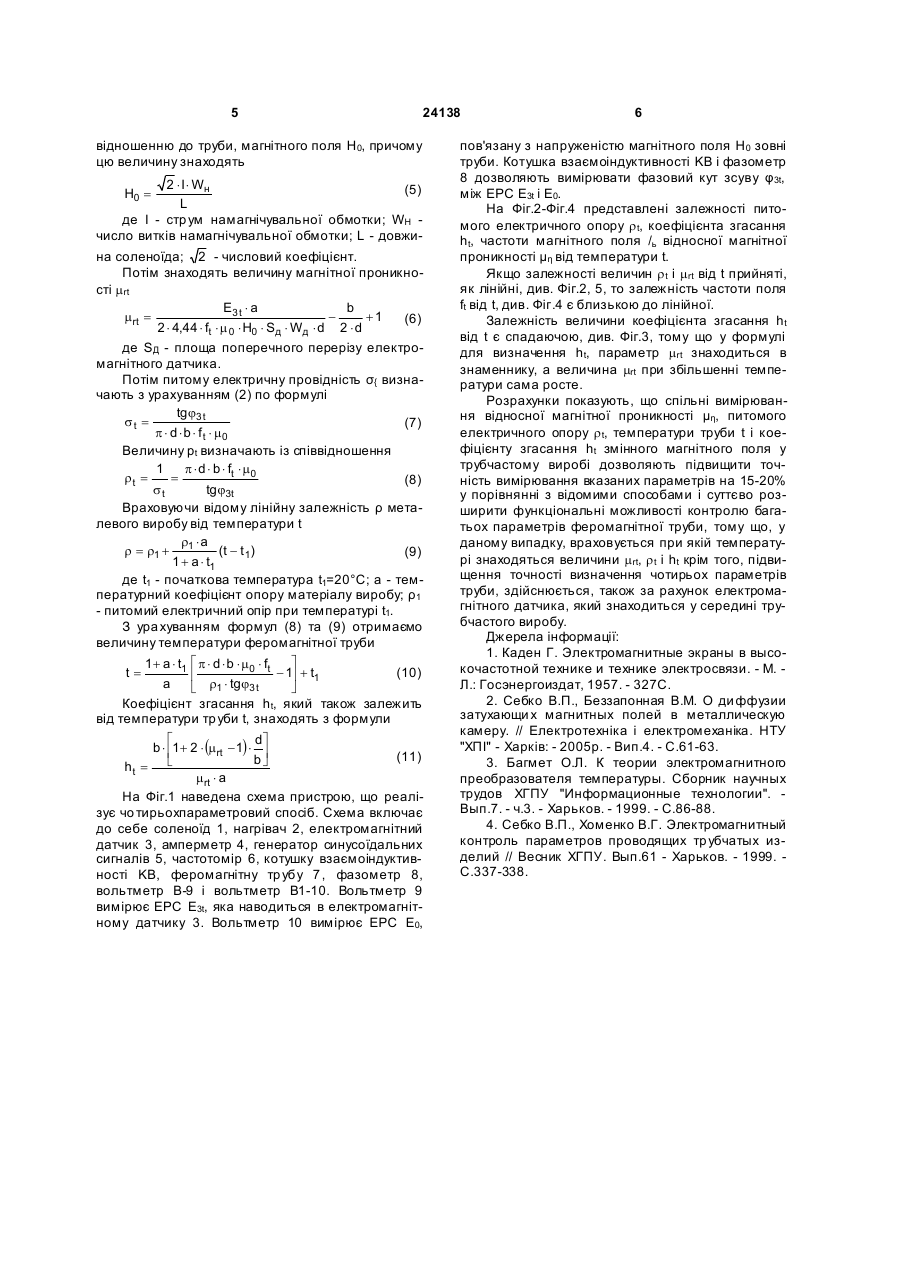
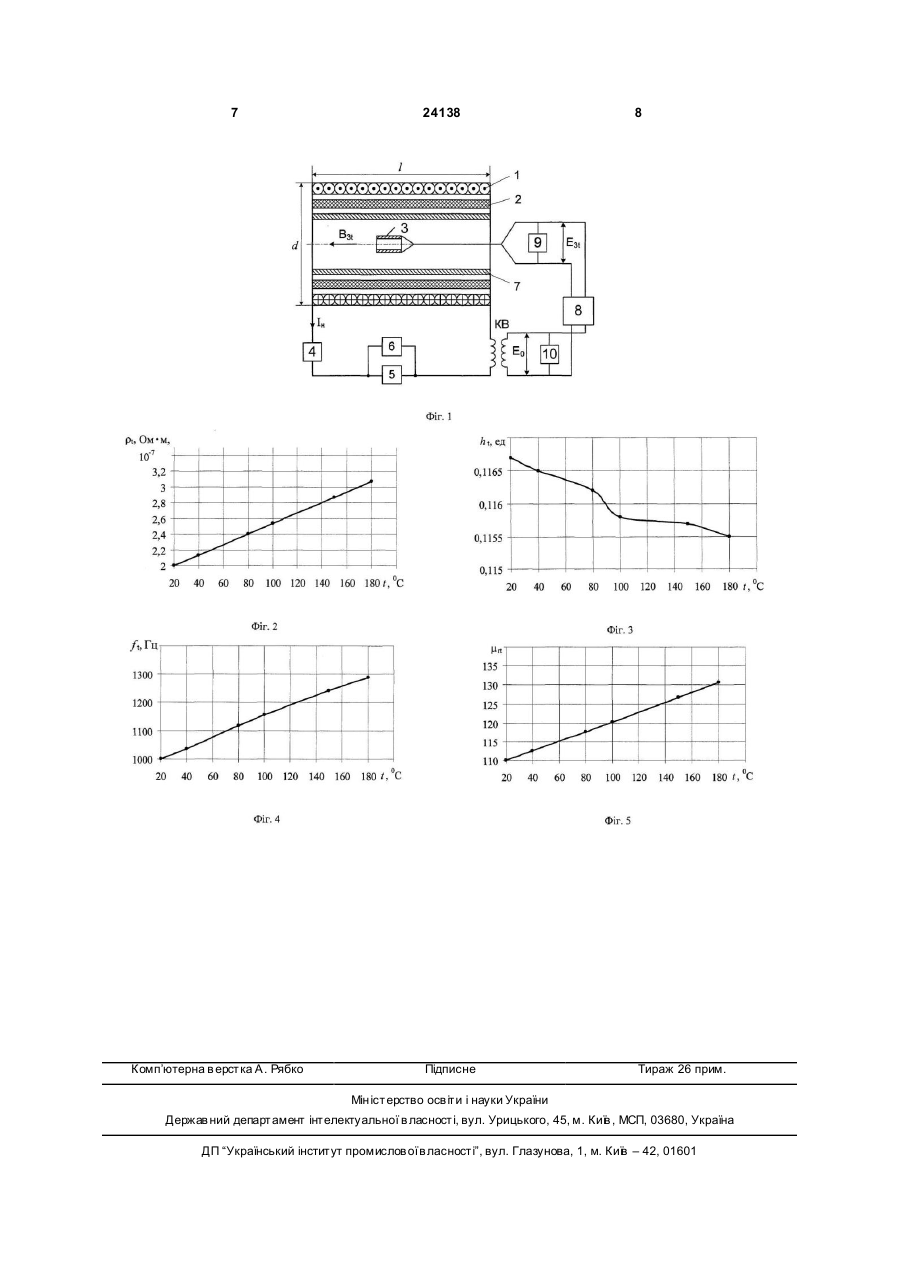
Екранний чотирипараметровий спосіб контролю параметрів феромагнітних трубчастих виробів, який передбачає проникнення змінного збуджуючого магнітного потоку у феромагнітний трубчастий провідний виріб, а також наведення вихрової ЕРС в стінці труби, під дією якої виникають вихрові струми, що створюють магнітний потік, який складається геометрично зі збуджуючим магнітним потоком, створюючи результуючий магнітний потік Ф3t, за допомогою якого визначають магнітну індукцію B3t, що наводить ЕРС Е3t датчика, який знаходиться у вн утрішній порожнині труби, при цьому результуючий магнітний потік зменшується по величині і зсувається по фазі, по відношенню до збуджуючого магнітного потоку, а все це в свою чергу приводить до згасання поля всередині труби, який відрізняється тим, що екранний ефект феромагнітної труби дає можливість визначити, за сигналами датчика всередині труби, відносну магнітну проникність mrt , питомий електричний опір 2 3 24138 нітного поля в трубчастому немагнітному виробі, заснований на збудженні вихрових струмів у немагнітній трубі, які створюють своє магнітне поле, котре у свою чергу, геометрично складається зі зовнішнім магнітним полем, що приводить до згасання зовнішнього поля в трубі. Відносними перевагами цього способу є те, що визначається коефіцієнт згасання дуже складного магнітного поля у тр убчастому немагнітному виробі. Недоліком даного способу є те, що в процесі виміру не визначаються електричний параметр, питома електрична провідність ρ і температура труби t. Також є відомим двохпараметровий спосіб [3] безконтактного вимірювання питомої електричної провідності і температури суцільного циліндричного виробу, заснований на наведенні вихрової ЕРС, під дією якої протікають вихрові стр уми, величина яких залежить від форми провідного виробу і електропровідності. Все це змінює, в свою чергу, амплітуду ви хідної ЕРС перетворювача і, таким чином, виникає залежність цієї ЕРС від електропровідності і температури. Перевага цього способу полягає в тому, що сумісно вимірюється електропровідність і температура немагнітного суцільного виробу. Недоліком даного способу є те, що не розглядається широкий асортимент виробів по їх магнітним параметрам і конфігураціям, наприклад, не контролюються феромагнітні трубчасті вироби. Найбільш близьким до заявленого, з технічної сутності, є спосіб [4], вимірювання магнітної проникності і електропровідності трубчастого виробу, при зондуванні його продольним магнітним полем, який полягає в тому, що змінне продольне магнітне поле викликає реакцію виробу, яка приводить до зміни амплітуди і фази вимірювальної обмотки трансформаторного електромагнітного перетворювача. Перевагами цього способу є сумісне визначення магнітного і електричного параметрів труби. Недоліками даного способу є низька точність вимірювання, тому що, цей спосіб також не враховує температуру, від якої залежать електромагнітні параметри, крім того, не враховується коефіцієнт згасання електромагнітного поля у трубчастому виробі. Задача корисної моделі - використання екранного трубчастого перетворювача, для сумісного визначення магнітної проникності m rt, питомого електричного опору r t, температури t і коефіцієнту згасання магнітного поля у трубчастому виробі ht, а також, підвищення точності визначення параметрів феромагнітної труби, розширення функціональних і технічних можливостей екранного перетворювача. Задача вирішується шляхом використання екранного трубчастого пристрою, який включає в себе: трубу, на якій знаходиться намагнічувальна обмотка, а також в порожнині труби, малогабаритний електромагнітний датчик з вимірювальною обмоткою. 4 Причому, формула для знаходження магнітного потоку в середині труби Ф3t (1) Φ3t=p·a· m 0·Η0·[1+2(μrt-1)·d] де p=3,14 - математична константа; a - радіус виробу; m 0 - магнітна константа, m 0=4p·10-7Гн/м; H0 - напруженість магнітного поля; m rt - відносна магнітна проникність труби з урахуванням температури; d - товщина стінки труби. Фазовий кут магнітного потоку Φ3t , можна визначити як d× b tg j3t = (2) d2 × mrt × t де d - глибина проникнення магнітного поля в трубу; b - вн утрішній радіус виробу. Магнітна індукція трубчастого виробу B3t , визначається як m × H × [1 + 2(mrt - 1) × d] (3) B3t = 0 0 a Причому ЕРС електромагнітного датчика Е3t який знаходиться в середині труби, визначають за формулою (4) E3 t = 4,44ft × p × a2 × Wд × B 3t д де 4,44 - чисельний коефіцієнт, вказує на те, що вимірюється ефективне значення ЕРС Е3t; ft частота змінення магнітного поля з урахуванням температури; Wд - число витків електромагнітного датчика; aд - радіус електромагнітного датчика. Сутність способу електромагнітних вимірювань відносної магнітної проникності mrt, питомого електричного опору r t, температури труби t і коефіцієнту згасання змінного магнітного поля в середині труби ht, полягає в тому, що струм в намагнічувальній обмотці соленоїду створює збуджуючий зовнішній магнітний потік, який проникає в середину труби, наводить вихрову ЕРС в стінках труби, під дією якої протікають вихрові струми, що мають свій магнітний потік, який взаємодіє зі збуджуючим магнітним потоком, і тим самим створює згасання магнітного поля в середині труби, оскільки вихрові струми залежать від магнітної проникності mrt, питомого електричного опору r t, а ці електромагнітні параметри, в свою чергу, залежать від температури t, таким чином, магнітний потік Ф3t в середині труби, а також магнітна індукція В3t і ЕРС датчика в порожнині труби Ε3t будуть залежати від величин mrt, r t, t, а також коефіцієнту згасання змінного продольного магнітного поля ht. Причому, для визначення температури труби необхідно використовувати умови постійного значення глибини проникнення магнітного поля d; в цьому разі змінення температури приводить до змінення величин mr и r, які є температурозалежними, при цьому, варіації електромагнітних параметрів компенсуються зміненням частоти магнітного поля ft і, таким чином, частота цього поля стає також залежною від температури. Методика сумісного вимірювання магнітної проникності mrt, питомого електричного опору r t, температури t феромагнітної труби і коефіцієнту згасання змінного магнітного поля в середині труби ht полягає в тому, що вимірюють ЕРС Е3t, частоту ft і розраховують напруженість зовнішнього по 5 24138 відношенню до труби, магнітного поля Н0, причому цю величину знаходять 2 × I × Wн (5) L де I - стр ум намагнічувальної обмотки; WH число витків намагнічувальної обмотки; L - довжиH0 = на соленоїда; 2 - числовий коефіцієнт. Потім знаходять величину магнітної проникності mrt E3 t × a b mrt = +1 (6) 2 × 4,44 × ft × m 0 × H0 × Sд × Wд × d 2 × d де SД - площа поперечного перерізу електромагнітного датчика. Потім питому електричну провідність σ{ визначають з урахуванням (2) по формулі tgj3 t st = (7) p × d × b × f t × m0 Величину pt визначають із співвідношення 1 p × d × b × ft × m0 rt = = (8) st tgj3t Враховуючи відому лінійну залежність ρ металевого виробу від температури t r ×a r = r1 + 1 (t - t 1) (9) 1 + a × t1 де t1 - початкова температура t1=20°С; a - температурний коефіцієнт опору матеріалу виробу; ρ1 - питомий електричний опір при температурі t1. З ура хуванням формул (8) та (9) отримаємо величину температури феромагнітної труби ù 1+ a × t1 é p × d × b × m0 × ft t= - 1ú + t1 (10) ê a r1 × tgj3 t ë û Коефіцієнт згасання ht, який також залежить від температури тр уби t, знаходять з формули é dù b × ê1+ 2 × (mrt - 1) × ú (11) bû ë ht = mrt × a На Фіг.1 наведена схема пристрою, що реалізує чо тирьохпараметровий спосіб. Схема включає до себе соленоїд 1, нагрівач 2, електромагнітний датчик 3, амперметр 4, генератор синусоїдальних сигналів 5, частотомір 6, котушку взаємоіндуктивності KB, феромагнітну тр убу 7 , фазометр 8, вольтметр В-9 і вольтметр В1-10. Вольтметр 9 вимірює ЕРС Е3t, яка наводиться в електромагнітному датчику 3. Вольтметр 10 вимірює ЕРС Е0, 6 пов'язану з напруженістю магнітного поля Н 0 зовні труби. Котушка взаємоіндуктивності KB і фазометр 8 дозволяють вимірювати фазовий кут зсуву φ3t, між ЕРС E3t і Е0. На Фіг.2-Фіг.4 представлені залежності питомого електричного опору r t, коефіцієнта згасання ht, частоти магнітного поля /ь відносної магнітної проникності μη від температури t. Якщо залежності величин r t і mrt від t прийняті, як лінійні, див. Фіг.2, 5, то залежність частоти поля ft від t, див. Фіг.4 є близькою до лінійної. Залежність величини коефіцієнта згасання ht від t є спадаючою, див. Фіг.3, тому що у формулі для визначення ht, параметр mrt знаходиться в знаменнику, а величина mrt при збільшенні температури сама росте. Розрахунки показують, що спільні вимірювання відносної магнітної проникності μη, питомого електричного опору r t, температури труби t і коефіцієнту згасання ht змінного магнітного поля у трубчастому виробі дозволяють підвищити точність вимірювання вказаних параметрів на 15-20% у порівнянні з відомими способами і суттєво розширити функціональні можливості контролю багатьох параметрів феромагнітної труби, тому що, у даному випадку, враховується при якій температурі знаходяться величини mrt, r t і ht крім того, підвищення точності визначення чотирьох параметрів труби, здійснюється, також за рахунок електромагнітного датчика, який знаходиться у середині трубчастого виробу. Джерела інформації: 1. Каден Г. Электромагнитные экраны в высокочастотной технике и технике электросвязи. - М. Л.: Госэнергоиздат, 1957. - 327С. 2. Себко В.П., Беззапонная В.М. О ди ффузии затухающи х магнитных полей в металлическую камеру. // Електротехніка і електромеханіка. НТУ "ХПІ" - Харків: - 2005p. - Вип.4. - С.61-63. 3. Багмет О.Л. К теории электромагнитного преобразователя температуры. Сборник научных трудов ХГПУ "Информационные технологии". Вып.7. - ч.3. - Харьков. - 1999. - С.86-88. 4. Себко В.П., Хоменко В.Г. Электромагнитный контроль параметров проводящих тр убчатых изделий // Весник ХГПУ. Вып.61 - Харьков. - 1999. С.337-338. 7 Комп’ютерна в ерстка А. Рябко 24138 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining four parameters of a screening ferromagnetic tubular article
Назва патенту російськоюСпособ контроля четырех параметров экранирующего ферромагнитного трубчатого изделия
МПК / Мітки
МПК: G01R 33/12
Мітки: параметрів, виробів, чотирипараметровий, екранний, феромагнітних, спосіб, сумісного, трубчастих, контролю
Код посилання
<a href="https://ua.patents.su/4-24138-ekrannijj-chotiriparametrovijj-sposib-sumisnogo-kontrolyu-parametriv-feromagnitnikh-trubchastikh-virobiv.html" target="_blank" rel="follow" title="База патентів України">Екранний чотирипараметровий спосіб сумісного контролю параметрів феромагнітних трубчастих виробів</a>
Спосіб сумісного неруйнівного контролю електромагнітних параметрів і температури циліндричних виробів
Номер патенту: 14958
Опубліковано: 15.06.2006
Автор: Себко Вадим Вадимович
МПК: G01R 33/12, G01K 11/00
Мітки: циліндричних, контролю, неруйнівного, електромагнітних, виробів, температури, параметрів, сумісного, спосіб
Формула / Реферат:
Спосіб сумісного неруйнівного контролю електромагнітних параметрів і температури циліндричних виробів, що включає пропускання вздовж об'єкта контролю електричних струмів, які наводять вихрові струми, що викликають свої магнітні потоки, які змінюють амплітуду і фазу напруги між контактами циліндричного об'єкта, причому по амплітуді і фазі напруги визначають відносну магнітну проникність
Спосіб електромагнітного контролю феромагнітних виробів, що рухаються
Номер патенту: 54919
Опубліковано: 17.03.2003
Автори: Іванов Дмитро Олексійович, Куваєв Володимир Миколайович, Чигринський Володимир Олександрович, Карпинський Юрій Пантелеймонович
МПК: G01N 27/90
Мітки: спосіб, виробів, рухаються, електромагнітного, контролю, феромагнітних
Формула / Реферат:
Спосіб електромагнітного контролю феромагнітних виробів, що рухаються, який включає попереднє намагнічування контрольованого виробу, перетворення зміни індукції, викликане рухом виробу поза полем, що його намагнічує, в електричний сигнал, виділення з отриманого сигналу імпульсів, інтегрування їх і оцінку контрольованих параметрів за результатами інтегрування, який відрізняється тим, що намагнічування виробу здійснюють в імпульсному...
Безконтактний модифікований спосіб контролю параметрів немагнітних виробів сумісно з температурою
Номер патенту: 18632
Опубліковано: 15.11.2006
Автор: Себко Вадим Вадимович
МПК: G01R 33/12
Мітки: виробів, модифікований, температурою, безконтактний, спосіб, параметрів, сумісної, немагнітних, контролю
Формула / Реферат:
Безконтактний модифікований спосіб контролю параметрів немагнітних виробів сумісно з температурою, який передбачає, що повздовж зразка створюють збуджуюче змінне магнітне поле, яке при проникненні його в зразок наводить вихрову ЕРС, під дією якої в зразку протікають вихрові струми, що створюють своє магнітне поле, яке геометрично додається до збуджуючого, і таким чином сумарне магнітне поле або магнітний потік викликає зміну сигналів...
Спосіб неруйнівного електричного контролю фізико-механічних параметрів слабоелектропровідних матеріалів і виробів
Номер патенту: 22814
Опубліковано: 21.04.1998
Автори: Яцун Андрій Михайлович, Яцун Михайло Андрійович, Шикиринець Ігор Михайлович, Соколовський Ярослав Іванович, Поберейко Богдан Петрович, Ільницький Іван Миколайович
МПК: G01N 27/00
Мітки: електричного, виробів, неруйнівного, слабоелектропровідних, контролю, спосіб, параметрів, матеріалів, фізико-механічних
Формула / Реферат:
Спосіб неруйнівного електричного контролю фізико-механічних параметрів слабо-електропровідних матеріалів і виробів, який заснований на тому, що крізь об'єкт контролю пропускають електричний струм і за його величиною та формою визначають параметри об'єкта контролю, який відрізняється тим, що в об'єкті контролю збуджуються власні згасаючі коливання струму, амплітуда, частота і коефіцієнт згасання яких залежать одночасно від питомої електричної...
Вихорострумовий дефектоскоп для контролю феромагнітних виробів
Номер патенту: 34934
Опубліковано: 15.03.2001
Автори: Трушаков Дмитро Володимирович, Ващенко Борис Іванович
МПК: G01N 27/00, G01N 1/00
Мітки: контролю, дефектоскоп, виробів, феромагнітних, вихорострумовий
Формула / Реферат:
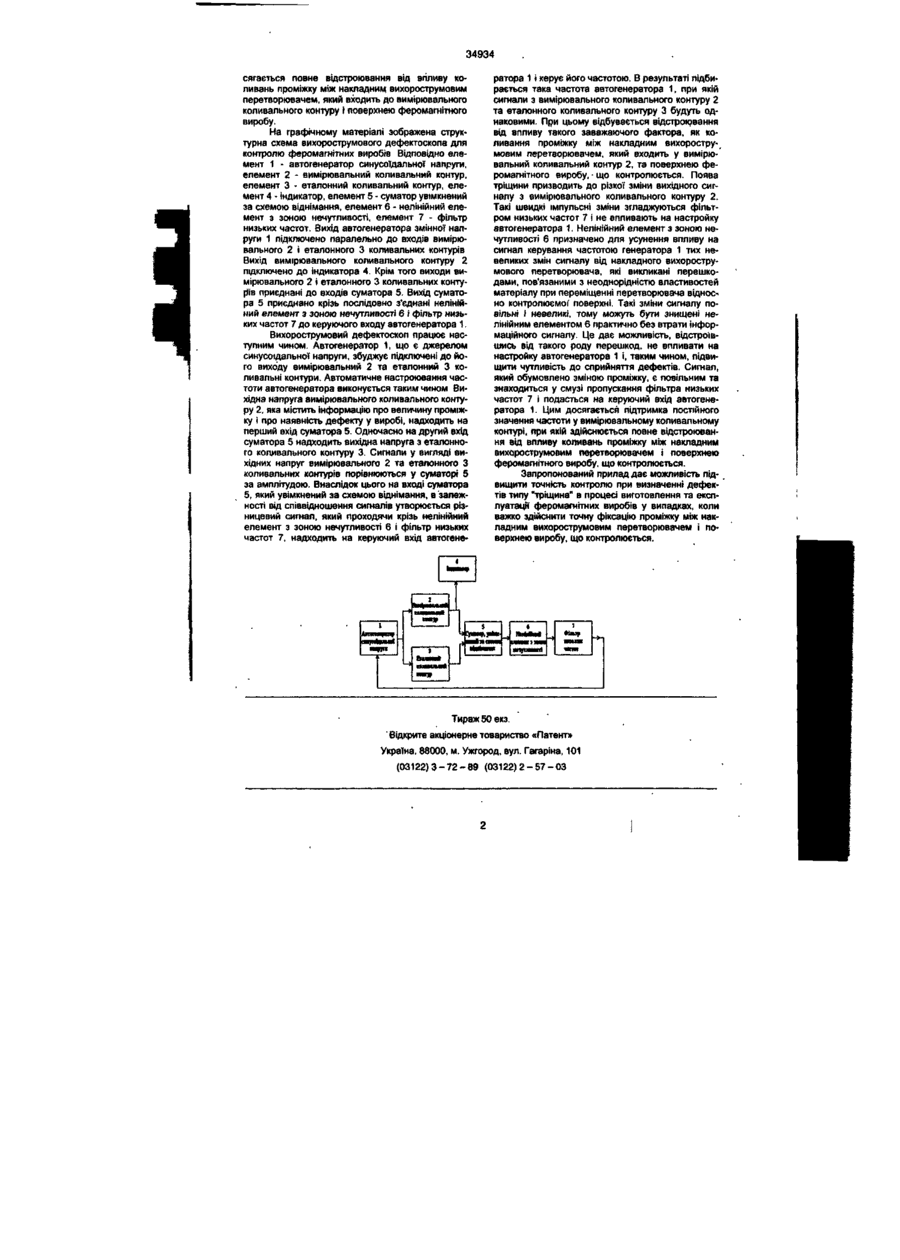
Вихорострумовий дефектоскоп для контролю феромагнітних виробів, що містить послідовно з'єднані автогенератор синусоїдальної напруги, два паралельні коливальні контури, один з яких вимірювальний і містить накладний вихорострумовий перетворювач, другий є компенсаційним і виконаний ідентичним вимірювальному, розташований поза поверхнею виробу, і індикатор, відрізняється тим, що автогенератор виконаний за схемою з електронним керуванням частотою,...
Попередній патент: Комбінований різець
Наступний патент: Багаторізцевий тримач
Випадковий патент: Спосіб визначення температури розупорядкування кластерів металевого розплаву (спосіб скребцова о.м.)