Спосіб електромагнітного контролю феромагнітних виробів, що рухаються
Номер патенту: 54919
Опубліковано: 17.03.2003
Автори: Іванов Дмитро Олексійович, Карпинський Юрій Пантелеймонович, Чигринський Володимир Олександрович, Куваєв Володимир Миколайович
Формула / Реферат
Спосіб електромагнітного контролю феромагнітних виробів, що рухаються, який включає попереднє намагнічування контрольованого виробу, перетворення зміни індукції, викликане рухом виробу поза полем, що його намагнічує, в електричний сигнал, виділення з отриманого сигналу імпульсів, інтегрування їх і оцінку контрольованих параметрів за результатами інтегрування, який відрізняється тим, що намагнічування виробу здійснюють в імпульсному подовжньому магнітному полі до його магнітного насичення, визначають тривалість імпульсів електричного сигналу зміни індукції позитивної і негативної полярності, а тривалість імпульсу і паузи намагнічування встановлюють з урахуванням тривалості імпульсів електричного сигналу зміни індукції.
Текст
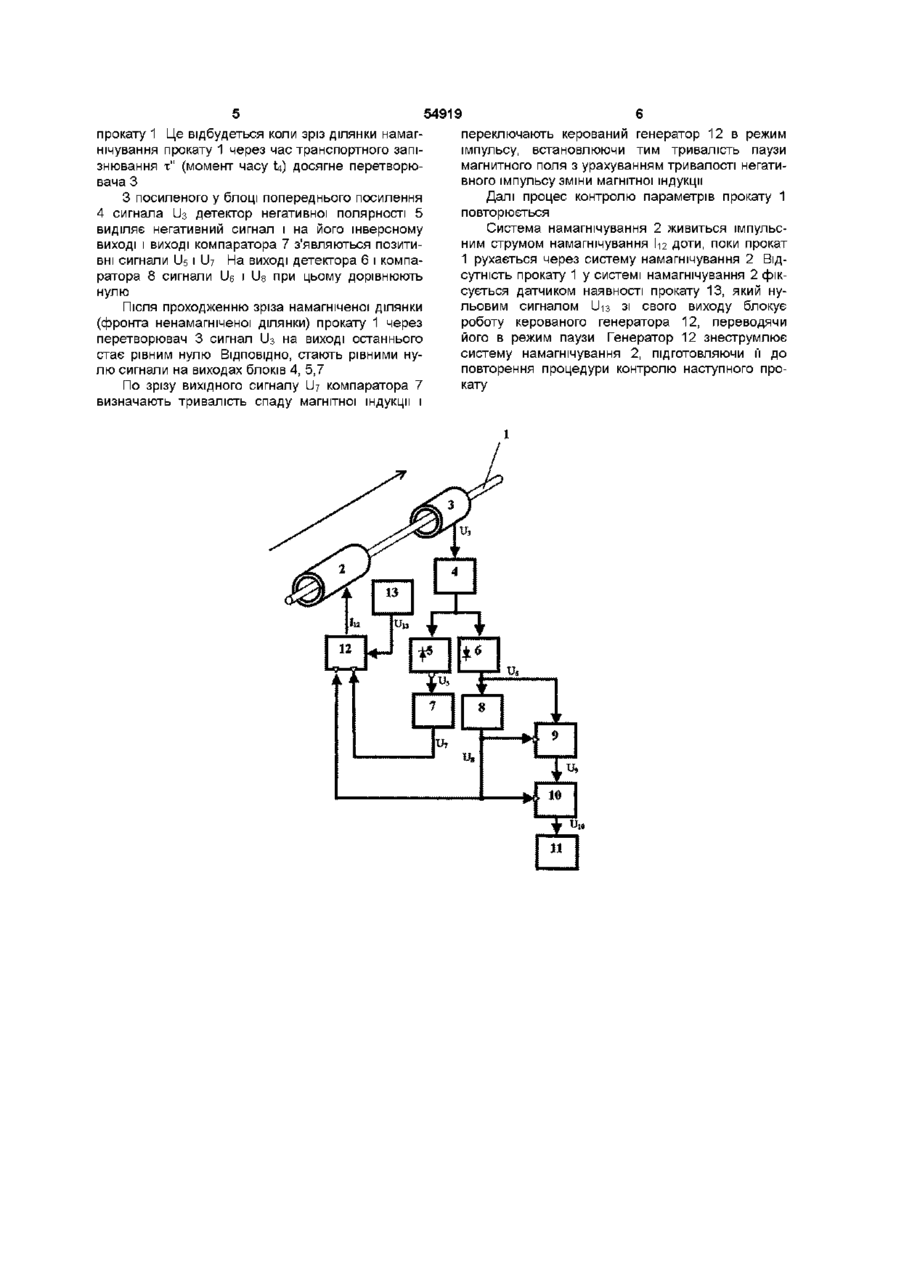
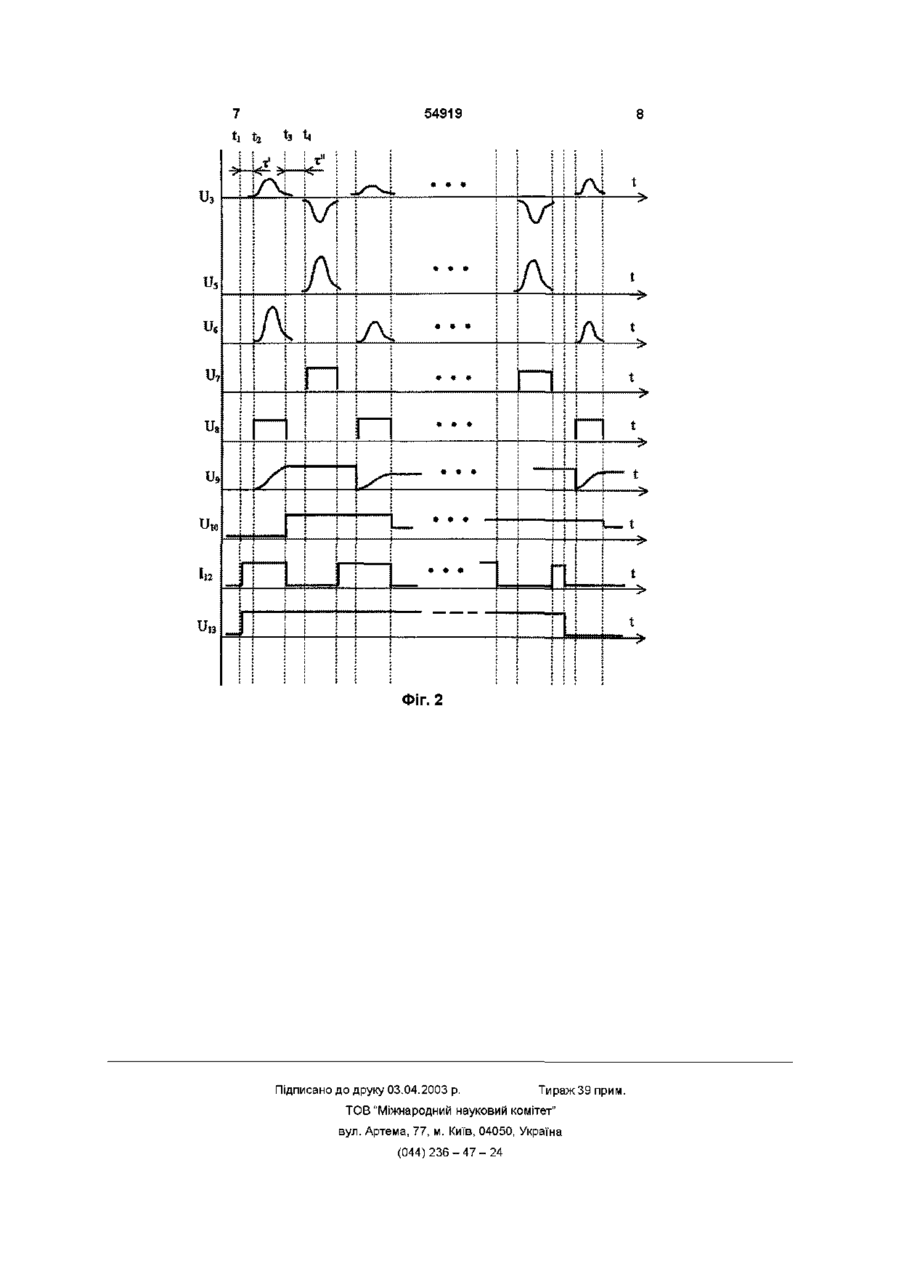
Спосіб електромагнітного контролю феромагнітних виробів, що рухаються, який включає попереднє намагнічування контрольованого виро бу, перетворення зміни індукції, викликане рухом виробу поза полем, що його намагнічує, в електричний сигнал, виділення з отриманого сигналу імпульсів, інтегрування їх і оцінку контрольованих параметрів за результатами інтегрування, який відрізняється тим, що намагнічування виробу здійснюють в імпульсному подовжньому магнітному полі до його магнітного насичення, визначають тривалість імпульсів електричного сигналу зміни індукції позитивної і негативної полярності, а тривалість імпульсу і паузи намагнічування встановлюють з урахуванням тривалості імпульсів електричного сигналу зміни індукції Винахід відноситься до способів контролю властивостей феромагнітних тіл, зокрема охолодженого прокату, і може бути використаний для визначення КІЛЬКОСТІ структурних магнітних фаз, наприклад мартенситу, що утворюється в прокаті в процесі його термомеханічного зміцнення з прокатного нагрівання в потоці прокатного стану Відомий спосіб електромагнітного контролю довгомірних феромагнітних тіл, що рухаються, зокрема прокату, полягає в створенні перемінного магнітного поля в контрольованому виробі, достатнього для його насичення, і точно такого ж магнітного поля поза контрольованого виробу, перетворенні зміни індукції в даних магнітних полях в електричний сигнал, визначенні амплітуди сигналів і судженні про контрольовані параметри за результатами порівняння амплітуд сигналів (с 7074, Управляемое термическое упрочнение проката / И Г Узлов, В В Парусов, Р В Гвоздев, О В Филонов - К Тэхника,1989-118 с ) спосіб електромагнітного контролю феромагнітних виробів, що рухаються, який полягає в тому, що контрольований вироб намагнічують у постійному магнітному полі, а при відсутності магнітного поля перетворюють зміну індукції, викликану рухом виробу поза намагнічуючого поля, в електричний сигнал, виділяють з отриманого сигналу імпульси однієї полярності, інтегрують їх, і за результатами інтегрування судять про контрольовані параметри (Ас 1078310 G 01 №27/90 Способ электромагнитного контроля движущихся ферромагнитных изделий Авторы М А Мильгуй, С Г Сандомирский-1984,БИ №9,с143) Недолік даного способу полягає в тім, що в контрольованому виробі створюються вихрьові струми, які розмагнічують вироб та витісняють основне поле на поверхню виробу (скін-ефект), приводячи до додаткових погрішностей контролю, нагріванню контрольованого виробу і збільшенню потужності, необхідної для створення у виробі магнітного поля насичення Найбільш близьким по технічній сутності є Недоліком даного способу є те, що він не дозволяє оцінити зміну контрольованих параметрів по довжині довгомірного виробу, а якщо зміна параметрів по довжині довгомірного виробу, що рухається, така, що зміна індукції поза поля, що намагнічує, носить знакозмінний характер, то інтегрування імпульсів однієї полярності приводить до появи помилки виміру В основу винаходу поставлена задача удосконалення способу електромагнітного контролю феромагнітних виробів, що рухаються, у якому шляхом намагнічування виробу імпульсним подовжнім магнітним полем до його магнітного насичення з тривалістю імпульсів і пауз намагнічування, установлених з урахуванням тривалості імпульсів електричного сигналу зміни індукції поза поля, що ю 54919 намагнічує, забезпечується можливість контролю зміни індукції поза поля, що намагнічує, по довжині довгомірного виробу з усуненням похибки, зв'язаної зі зміною контрольованих параметрів вздовж виробу, за рахунок чого підвищується точність контролю Поставлена задача досягається тим, що в способі електромагнітного контролю феромагнітних виробів, що рухаються, який містить попереднє намагнічування контрольованого виробу, перетворення зміни індукції, викликане рухом виробу поза поля, що намагнічує, в електричний сигнал, виділення з отриманого сигналу імпульсів, інтегрування їх і оцінку контрольованих параметрів за результатами інтегрування, ВІДПОВІДНО ДО винаходу намагнічування виробу роблять імпульсним подовжнім магнітним полем до його магнітного насичення, визначають тривалості імпульсів електричного сигналу зміни індукції позитивної і негативної полярності, а тривалість імпульсу і паузи намагнічування встановлюють з урахуванням тривалості імпульсів електричного сигналу зміни індукції Сукупність істотних ознак дозволяє одержати технічний результат завдяки іншому процесу намагнічування контрольованого виробу Характерною рисою даного способу електромагнітного контролю довгомірних феромагнітних виробів, що рухаються, є те, що намагнічування здійснюється подовжнім імпульсним магнітним полем до магнітного насичення виробу, і тим самим забезпечується дискретно-безперервний контроль параметрів по довжині довгомірного феромагнітного виробу з малою чутливістю до поперечного зсуву виробу в пристрої, що намагнічує, і пристрої, що перетворює зміну індукції в електричний сигнал Крім того, вибір тривалості імпульсу і паузи поля, що намагнічує, по вимірюваній тривалості імпульсів електричного сигналу зміни індукції, викликаних рухом контрольованого виробу поза магнітним полем, дозволяє, з одного боку, врахувати тривалість перехідних процесів у вимірювальній системі, зв'язаних з індуктивністю ланцюгів намагнічування і швидкістю руху виробу, виключивши помилки оцінки контрольованих параметрів, зв'язаних з перехідними процесами, а, з іншого боку, одержати максимально можливе число вимірів по довжині виробу На фіг 1 представлена одна з можливих схем пристрою для здійснення запропонованого способу, а на фіг 2 - діаграма сигналів, що пояснює роботу схеми На фіг 1 позначені 1 - прокат, 2 - система намагнічування прокату, наприклад, прохідний соленоїд з магнітною системою, 3 - перетворювач зміни індукції в електричний сигнал, наприклад, прохідна магнітна котушка, 4 - блок попереднього посилення, 5,6 - детектори полярності сигналу, 7,8 -компаратори, 9 - інтегратор, 10 - блок пам'яті, 11 показуючий (реєструючий) прилад, 12 - керований генератор імпульсів струму намагнічування, 13 датчик наявності прокату Спосіб реалізується таким чином У початковий момент часу, при відсутності прокату 1, сигнал низького рівня U-із з датчика наявності прокату 13, надходячи на вхід дозволу роботи генератора 12, блокує його, забороняючи живлення системи намагнічування 2 струмом намагнічування І12 Параметри системи намагнічування 2 і амплітуду імпульсу струму намагнічування І12 генератора 12 вибирають таким чином, щоб в імпульсі забезпечити магнітне насичення ділянки прокату 1 Після ПОЯВИ прокату 1 у системі намагнічування 2 і фіксації його датчиком наявності прокату 13 в момент часу ti на виході останнього з'являється сигнал U-із високого рівня, що дозволяє роботу керованого генератора 12 і переводить його в режим імпульсу Струм намагнічування \и надходить 3 керованого генератора 12 у систему намагнічування 2, яка забезпечує намагнічування в імпульсному прдовжному магнитному полі охоплювану нею ділянку прокату 1, що рухається, до магнітного насичення останнього Далі, перетворювач зміни індукції 3 перетворює зміну індукції поза поля, що намагнічує, в електричний сигнал ІІз позитивної полярності пропорційний швидкості наростання залишкової індукції прокату 1 Це відбудеться коли фронт ділянки намагнічування прокату 1 через час транспортного запізнювання х' (момент часу Ь) досягне перетворювача З З посиленого у блоці попереднього посилення 4 сигнала ІІз детектор позитивної полярності 6 виділяє позитивний сигнал ІІє і на виході компаратора 8 з'явиться позитивний сигнал Us На виході детектора негативної полярності 5 і, ВІДПОВІДНО, ВИХОДІ компаратора 7 сигнали Us і U7 будуть дорівнюють нулю Фронтом сигналу Us вміст інтегратора 9 скидається в нуль, після чого здійснюється інтегрування імпульса сигнала U6 Після проходження (момент часу t3) фронту намагніченої ділянки прокату 1 через перетворювач 3, зміна індукції в останньому не відбувається, і сигнал U3 на його виході стає рівним нулю ВІДПОВІДНО, стають рівним нулю сигнали на виході блоку попереднього посилення 4, детектора позитивної полярності сигналу 6 (\JQ) І компаратора 8 (Us) По переходу сигналу компаратора 8 в нуль визначають тривалість імпульса магнітної індукції і зрізом сигналу компаратора 8 Us здійснюють запис сигналу Ug з виходу інтегратора 9 в блок пам'яті 10, а генератор 12 переводиться в режим паузи, що встановлює тривалість імпульсу намагнічування з урахуванням визначеної тривалості імпульса магнітної індукції Таким чином, в момент часу t3 на виході блоку пам'яті 10 з'являється сигнал, пропорційний величині залишкової індукції в прокаті, по якому, за допомогою показуючого (реєструючого) приладу 11, судять про контрольований параметр, наприклад про КІЛЬКІСТЬ магнітних структурних складових в охолоджуваному прокаті 1, а керований генератор 12 знеструмлює систему намагнічування 2, установлюючи на своєму виході струм намагнічування І12 що дорівнює нулю Система намагнічування 2 припиняє намагнічування ділянки прокату 1, що знаходиться в ній Далі, перетворювач зміни індукції 3 перетворює зміну індукції поза поля, що намагнічує, в електричний сигнал U3 негативної полярності пропорційний швидкості зменшення залишкової індукції 54919 прокату 1 Це відбудеться коли зріз ділянки намагнічування прокату 1 через час транспортного запізнювання х" (момент часу U) досягне перетворювача З З посиленого у блоці попереднього посилення 4 сигнала ІІз детектор негативної полярності 5 виділяє негативний сигнал і на його інверсному виході і виході компаратора 7 з'являються позитивні сигнали Us і ІІ7 На виході детектора 6 і компаратора 8 сигнали ІІ6 і Us при цьому дорівнюють нулю Після проходженню зріза намагніченої ділянки (фронта ненамагніченої ділянки) прокату 1 через перетворювач 3 сигнал ІІз на виході останнього стає рівним нулю ВІДПОВІДНО, стають рівними нулю сигнали на виходах блоків 4, 5,7 По зрізу вихідного сигналу ІІ7 компаратора 7 визначають тривалість спаду магнітної індукції і переключають керований генератор 12 в режим імпульсу, встановлюючи тим тривалість паузи магнитного поля з урахуванням тривалості негативного імпульсу зміни магнітної індукції Далі процес контролю параметрів прокату 1 повторюється Система намагнічування 2 живиться імпульсним струмом намагнічування \и доти, поки прокат 1 рухається через систему намагнічування 2 Відсутність прокату 1 у системі намагнічування 2 фіксується датчиком наявності прокату 13, який нульовим сигналом U-із зі свого виходу блокує роботу керованого генератора 12, переводячи його в режим паузи Генератор 12 знеструмлює систему намагнічування 2, підготовляючи її до повторення процедури контролю наступного прокату 54919 v Ґ1 ua u U Фіг. 2 Підписано до друку 03.04.2003 p. Тираж 39 прим. ТОВ "Міжнародний науковий комітет" вул. Артема, 77, м. Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for electromagnetic monitoring of movable ferromagnetic articles
Назва патенту російськоюСпособ электромагнитного контроля движущихся ферромагнитных изделий
МПК / Мітки
МПК: G01N 27/90
Мітки: контролю, спосіб, рухаються, феромагнітних, електромагнітного, виробів
Код посилання
<a href="https://ua.patents.su/4-54919-sposib-elektromagnitnogo-kontrolyu-feromagnitnikh-virobiv-shho-rukhayutsya.html" target="_blank" rel="follow" title="База патентів України">Спосіб електромагнітного контролю феромагнітних виробів, що рухаються</a>
Вихорострумовий дефектоскоп для контролю феромагнітних виробів
Номер патенту: 34934
Опубліковано: 15.03.2001
Автори: Ващенко Борис Іванович, Трушаков Дмитро Володимирович
МПК: G01N 1/00, G01N 27/00
Мітки: вихорострумовий, феромагнітних, контролю, виробів, дефектоскоп
Формула / Реферат:
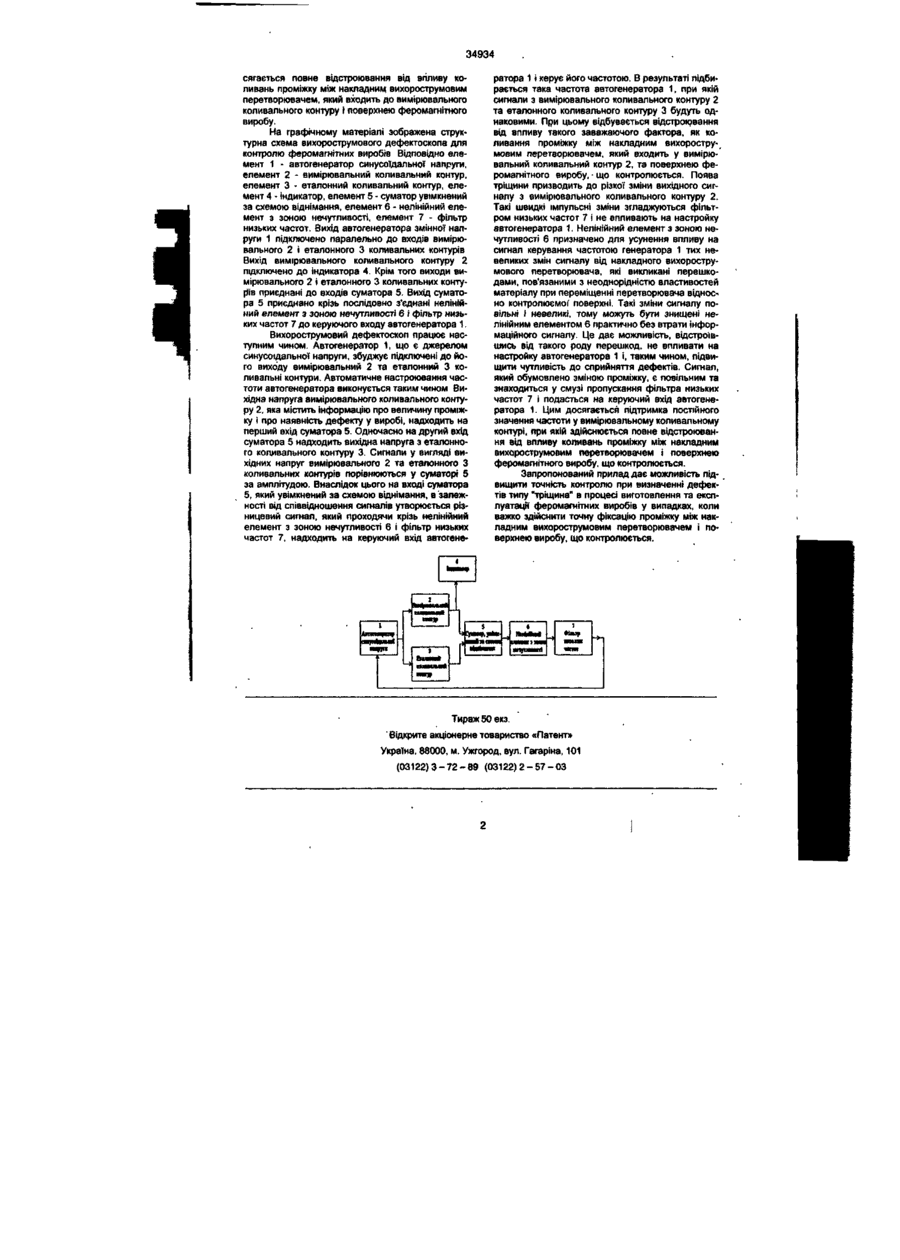
Вихорострумовий дефектоскоп для контролю феромагнітних виробів, що містить послідовно з'єднані автогенератор синусоїдальної напруги, два паралельні коливальні контури, один з яких вимірювальний і містить накладний вихорострумовий перетворювач, другий є компенсаційним і виконаний ідентичним вимірювальному, розташований поза поверхнею виробу, і індикатор, відрізняється тим, що автогенератор виконаний за схемою з електронним керуванням частотою,...
Спосіб повного відстроювання від впливу проміжку у вихорострумовій дефектоскопії феромагнітних виробів
Номер патенту: 34933
Опубліковано: 15.03.2001
Автори: Ващенко Борис Іванович, Трушаков Дмитро Володимирович
МПК: G01N 27/90
Мітки: спосіб, дефектоскопії, феромагнітних, повного, вихорострумовий, проміжку, виробів, впливу, відстроювання
Формула / Реферат:
Спосіб повного відстроювання від впливу проміжку у вихорострумовій дефектоскопії феромагнітних виробів, полягаючий у тому, що вимірюють сигнал, отриманий від увімкненого в вимірювальний коливальний контур накладного вихорострумового перетворювача, який збуджується сигналом автогенератора синусоїдальної напруги і встановлений на поверхню феромагнітного виробу з деяким заважаючим проміжком, відрізняється тим, що з метою підвищення точності...
Пристрій для вимірювання та контролю фізико-механічних властивостей феромагнітних виробів
Номер патенту: 20922
Опубліковано: 07.10.1997
Автори: Фролов Валентин Олексійович, Бредіхін Володимир Михайлович, Себко Вадим Пантелейович
МПК: G01B 7/00, G01N 27/00
Мітки: виробів, вимірювання, контролю, пристрій, фізико-механічних, феромагнітних, властивостей
Формула / Реферат:
Устройство для измерения и контроля физико-механических свойств ферромагнитных изделий, содержащее генератор, выход которого соединен с каналом, состоящим из последовательно соединенных датчика вносимой ЭДС и нормирующего усилителя, и датчика опорного напряжения, выход которого соединен со входом нормирующего усилителями опорного напряжения, соответственно, отличающееся тем, что устройство выполнено многоканальным, каждый канал которого...
Спосіб ультразвукового контролю виробів у вигляді тіл обертання і пристрій для його реалізації
Номер патенту: 39453
Опубліковано: 15.06.2001
Автори: Погребенник Володимир Дмитрович, Крайківський Ростислав Степанович
МПК: G01N 29/34
Мітки: реалізації, ультразвукового, вигляді, пристрій, виробів, спосіб, обертання, контролю, тіл
Формула / Реферат:
1. Спосіб ультразвукового контролю виробів у вигляді тіл обертання, який полягає у тому, що у виріб випромінюють імпульси ультразвукових коливань у процесі його сканування похилим променем перетворювача, приймають відбиті від дефекта ехо-сигнали і вимірюють їх час надходження ti відносно сигналу зондування, а наявність дефекту визначають при досягненні встановленого значення різницею часів надходження відбитого сигналу у двох послідовних...
Спосіб контролю гарантованої якості виробів радіоелектронної техніки
Номер патенту: 29358
Опубліковано: 16.10.2000
Автори: Лучко Ігор Миколайович, Жердєв Микола Костянтинович
МПК: G01R 35/00
Мітки: техніки, якості, спосіб, виробів, радіоелектронної, контролю, гарантованої
Формула / Реферат:
Спосіб контролю гарантованої якості виробів радіоелектронної техніки, що включає вимірювання параметрів вузлів та блоків і порівняння вимірених параметрів з допустимими, який відрізняється тим, що з числа N елементів виробу випадковим образом формують вибірку в обсязі з n елементів , причому n << Ν, вимірюють значення параметрів у визначені проміжки часу та отримують апріорну інформацію для поділу елементів на класи, після чого...
Попередній патент: Установка для формування дисперсних сумішей
Наступний патент: Спосіб моніторингу поточної адаптованості оператора до роботи за змінним графіком
Випадковий патент: Спосіб виробництва м'ясо-кісткового борошна