Комплексна навігаційна система
Формула / Реферат
Комплексна навігаційна система, що включає інерційну навігаційну систему з використанням як коригований вимірювач, перший і другий відраховувальні пристрої і високоточну кореляційно - екстремальну навігаційну систему з використанням як коригувальний вимірювач, яка відрізняється тим, що у пристрій додатково введені електронний ключ, запам'ятовувальний пристрій і блок керування, причому послідовно з'єднані електронний ключ і запам'ятовувальний пристрій включені між виходом другого відраховувального пристрою і другим входом першого відраховувального пристрою, керувальний вхід електронного ключа з'єднаний з виходом коригувального вимірювача, а вихід блока керування з'єднаний з керувальним входом коригувального вимірювача.
Текст
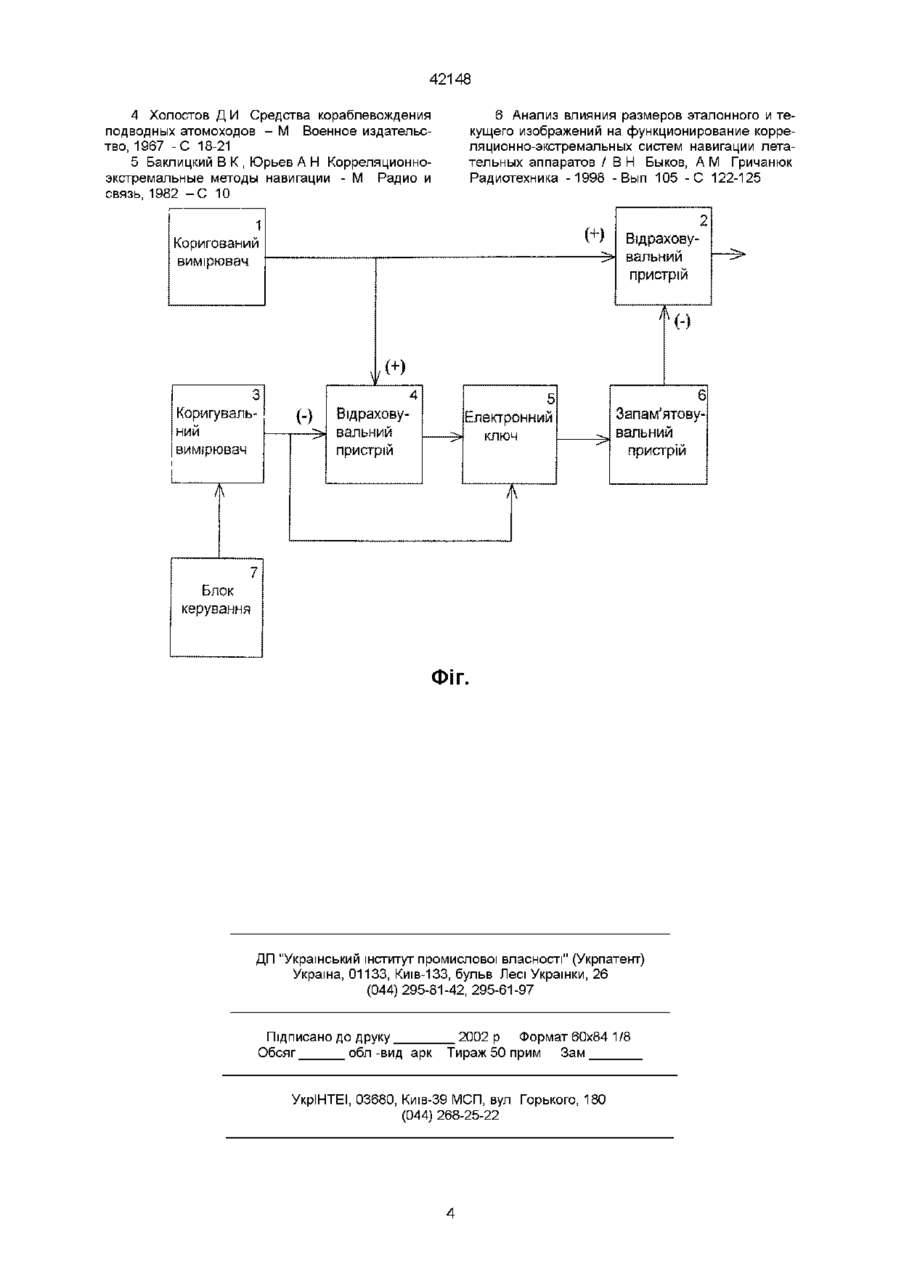
Комплексна навігаційна система, що включає інерційну навігаційну систему з використанням як коригований вимірювач, перший і другий відраховувальні пристрої і високоточну кореляційно екстремальну навігаційну систему з використанням як коригувальний вимірювач, яка відрізняється тим, що у пристрій додатково введені електронний ключ, запам'ятовувальний пристрій і блок керування, причому послідовно з'єднані електронний ключ і запам'ятовувальний пристрій включені між виходом другого відраховувального пристрою і другим входом першого відраховувального пристрою, керувальний вхід електронного ключа з'єднаний з виходом коригувального вимірювача, а вихід блока керування з'єднаний з керувальним входом коригувального вимірювача Пропонований винахід належить до галузі навігаційних приладів і може бути використаний, зокрема, у бортових навігаційних комплексах літальних апаратів різноманітного призначення для безперервного визначення поточних навігаційних параметрів із заданою точністю Відома «Комплексна навігаційна система з замкнутою схемою компенсації похибок», що включає коригувальний вимірював, коригований вимірювач, відраховувальний пристрій, фільтр і пристрій корекції У пристрої забезпечується безперервна корекція похибок одного вимірювача іншим, чим підвищується точність вимірів Для комплексування потрібна одночасна безперервна робота обох вимірювачів [1] Недоліком цього пристрою є те, що при використанні коригувальним вимірювачем пристроїв дискретного принципу дії, через відсутність можливості запам'ятовування значення коригувального сигналу в проміжках часу між надходженням вихідних сигналів від коригувального вимірювача, не забезпечується безперервність корекції, що знижує точність вимірів пристрою в цілому Відома також «Комплексна навігаційна система з комплексуванням відстежу-вального радіотехнічного вимірювача, з нерадютехнічним вимірювачем», що включає коригувальний радіотехнічний вимірювач, коригований нерадютехнічний вимірювач, відраховувальний пристрій, фільтр, суматор і дві інерційні ланки У пристрої забезпечується безперервна корекція похибок нерадютехнічного вимірювача відстежувальним радіотехнічним вимірювачем, чим підвищується точність вимірів Для комплексування потрібна одночасна безперервна робота обох вимірювачів [1] До недоліків даного пристрою відноситься те, що при використанні коригувальним вимірювачем пристроїв дискретного принципу дії, через відсутність можливості запам'ятовування значення коригувального сигналу в проміжках часу між надходженням вихідних сигналів від коригувального вимірювача, не забезпечується безперервність корекції, що знижує точність вимірів пристрою в цілому Найближчим до пропонованого технічнім рішенням, обраним як прототип, є «Комплексна навігаційна система з компенсацією похибок першого вимірювача», яка включає нерадютехнічний вимірювач використаний як коригований вимірювач, перший і другий відраховувальні пристрої, радіотехнічний вимірювач використаний як коригувальний вимірювач і фільтр У цій системі вихід коригованого вимірювача з'єднаний із першим входом першого відраховувального пристрою і першим входом другого відраховувального пристрою, а до другого входу другого відраховувального пристрою підключений коригувальний вимірювач, причому фільтр включений між виходом другого відраховувального пристрою і другим входом першого відраховувального пристрою [1] Робота даного пристрою полягає в наступному При комплексуванні радіотехнічного і нерадютехнічного вимірювачів різниця їхнього принципу дії відбивається на спектрах перешкод на виходах цих вимірювачів Обидва вимірювачі визначають той самий навігаційний параметр W(t) різноманітними методами ВИХІДНІ сигнали обох вимірювачів надходять на входи другого відраховувального 00 42148 пристрою, де відбувається взаємна компенсація навігаційного параметра W(t), вимірюваного обома вимірювачами У результаті на виході другого відраховувального пристрою виділяється сигнал, що містить перешкоди обох вимірювачів Далі цей сигнал надходить на вхід фільтра, що цілком пропускає сигнал перешкоди коригованого вимірювача і загрими сигнал перешкоди корегувального вимірювача У результаті на виході фільтра формується оцінка перешкоди коригованого вимірювача, що далі надходить на другий вхід першого відраховувального пристрою і використовується як коригувальний сигнал Одночасно з цим на перший вхід першого відраховувального пристрою надходить вихідний сигнал коригованого вимірювача, що містить у своєму складі як точне значення вимірюваного навігаційного параметра, так і сигнал перешкоди У першому відраховувальному пристрої відбувається процес відрахування значення оцінки перешкоди з вихідного сигналу коригованого вимірювача Це дозволяє скомпенсувати перешкоду коригованого вимірювача и оцінкою і тим самим підвищити точність вимірів Повна компенсація перешкоди коригованого вимірювача, сигналом із фільтра, досягається, коли спектри перешкод обох вимірювачів не перекриваються Для комплексування потрібна одночасна безперервна робота обох вимірювачів Проте в пристрої, при використанні коригувальним вимірювачем пристроїв дискретного принципу дії, через відсутність можливості запам'ятовування значення коригувального сигналу в проміжках часу між надходженням вихідних сигналів від коригувального вимірювача, не забезпечується безперервність корекції, що знижує точність вимірів пристрою в цілому Таким чином, недоліком пристрою-прототипу є відсутність можливості безперервної корекції одного вимірювача іншим при використанні коригувальними навігаційними вимірювачами, вимірювальних пристроїв дискретного принципу дії, що знижує точність вимірів пристрою в цілому В основу винаходу поставлено завдання створити таку комплексну навігаційну систему, яка за рахунок уведення електронного ключа, запам'ятовувального пристрою і блока керування, забезпечувала б можливість безперервної корекції одного вимірювача іншим, шляхом запам'ятовування в запам'ятовувальному пристрої останнього значення коригувального сигналу у проміжках часу між надходженням сигналів віл коригувального вимірювача, що дозволило б підвищити точність вимірів комплексною навігаційною системою в цілому Технічний результат, який може бути отриманий при здійсненні винаходу, полягає в реалізації можливості безперервної корекції одного вимірювача іншим, при використанні для корекції показань навігаційних вимірювачів безперервної дії (наприклад, інерційних навігаційних систем), високоточних вимірювачів дискретного принцип) дії (наприклад, кореляційно-екстремальних навігаційних систем), що дозволило б підвищити точність вимірів комплексною навігаційною системою в цілому Поставлене завдання вирішується за рахунок того, що в пристрій, який включає коригований вимірювач, перший і другий відраховувальні пристрої і коригувальний вимірювач, у якому вихід кориго ваного вимірювача з єднаний з першим входом першого відраховувального пристрою і першим входом другого відраховувального пристрою, а до другого входу другого відраховувального пристрою підключений коригувальний вимірювач, додатково введені електронний ключ, запам'ятовувальний пристрій і блок керування, причому послідовно з'єднані електронний ключ і запам'ятовувальний пристрій включені між виходом другого відраховувального пристрою і другим входом першого відраховувального пристрою, керувальний вхід електронного ключа з'єднаний з виходом коригувального вимірювача, а вихід блока керування з'єднаний з керувальним входом коригувального вимірювача Структурна схема пропонованого пристрою наведена на фіг Пропонований пристрій включає інерційну навігаційну систему використану як коригований вимірювач 1, відраховувальний пристрій 2, високоточну кореляційно-екстремальну навігаційну систему використану як коригувальний вимірювач 3 відраховувальний пристрій 4, електронний ключ 5, запам'ятовувальний пристрій 6 і блок керування 7 При цьому вихід коригованого вимірювача 1 з'єднаний із першим входом відраховувального пристрою 2 і першим входом відраховувального пристрою 4, а до другого входу відраховувального пристрою 4 підключений коригувальний вимірювач З, причому послідовно з'єднані електронний ключ 5 і запам'ятовувальний пристрій 6 включені між виходом відраховувального пристрою 4 і другим входом відраховувального пристрою 2, керувальний вхід електронного ключа 5 з'єднаний з виходом коригувального вимірювача 3, а вихід блока керування 7 з'єднаний з керувальним входом коригувального вимірювача З У пропонованому пристрої електронний ключ 5 виконаний по ВІДОМІЙ схемі [2], [3] у вигляді електронного пристрою, у якого при подачі на керувальний вхід керувального сигналу опір між входом і виходом нищівно малий (в ідеальному випадку він дорівнює нулю), а при відсутності керувального сигналу великий (в ідеальному випадку він дорівнює нескінченності) Як запам'ятовувальнийпристрій 6 може бути використана, наприклад, інтегрувальна ланка [3] При малих значеннях постійної часу x=RC (тобто малих значеннях ємності С і опору R) і великому вхідному опорі відраховувального пристрою 2, інтегрувальна ланка відіграє роль осередку пам'яті, зберігаючи, після розімкнення електронного ключа 5, на своєму виході останнє значення коригувального сигналу Будова блока керування 7 залежить від виконуваних комплексною навігаційною системою завдань, це може бути, наприклад, таймер, що включає коригувальний вимірювач 3 у точно задані проміжки часу Робота пропонованого пристрою полягає в наступному Обидва вимірювачі визначають той самий навігаційний параметр W(t) різноманітними методами Відомо [4], що інерційна навігаційна система, використовувана в даному випадку як коригований вимірювача характеризується повільно наростаючою 3, часом роботи помилкою вимірів AX(t), наві 42148 гаційного параметра W(t) Ця помилка обумовлена дрейфом гіроскопів і є наростаючою функцією часу Тому, сигнал на виході коригованого вимірювача 1 можна представити в загальному вигляді як Ui(t)=X(t)+AX(t) Десь X(t) - точне значення вимірюваного навігаційного параметра W(t), AX(t) - помилка вимірів Також відомо [5], [6], що кореляційно-екстремальна навігаційна система, використовувана в даному випадку як високоточний коригувальний вимірювач, є пристроєм дискретного и принципу дії Сигнал на виході кореляційно-екстремальної навігаційної системи формується після збігу поточного зображення земної поверхні з еталонним, що зберігається в бортовому спецобчислювачі Цьому передує цикл роботи, який складається з побудови поточного зображення шляхом сканування земної поверхні, його масштабування і порівняння з еталонним, що займає певний час Таким чином, у силу свого фізичного принципу дії, кореляційно-екстремальні навігаційні системи не можуть забезпечити безперервної видачі поточних значень вимірюваного навігаційного параметра Перед початком роботи комплексної навігаційної системи запам'ятовувальний пристрій 6 обнуляється У перші моменти часу після вмикання коригованого вимірювача 1, помилка вимірів мала і нею можна знехтувати Тоді сигнал на його виході має вигляд Ui(t)=X(t)+O=X(t) При цьому, коригувальний вимірювач 3 виключений, сигнал на його виході відсутній, електронний ключ 5 розімкнутий і коригувальний сигнал AU(t), на виході запам'ятовувального пристрою 6, дорівнює нулю Тому сигнал LlBHxft) на виході відраховувального пристрою 2, дорівнює сигналу на виході коригованого вимірювача 1 UBHx(t)=Ui(t)-AU(t)=Ui(t)-O=Ui(t)=X(t) Тобто, точному значенню вимірюваного навігаційного параметра W(t) Враховуючи повільний характер наростання помилки вимірів AX(t), за короткі проміжки часу роботи коригованого вимірювача 1, и можна вважати постійною Тоді ДХфиДХ, Ui(t)=X(t)+AX При тривалій роботі коригованого вимірювача 1, коли помилка вимірів AX(t) досягає значного розміру що перевершує припустимі значення, виникає необхідність корекції його показань високоточним коригувальним вимірювачем 3, з метою «списання» помилок вимірів Для цього блок керування 7 у заданий момент часу включає коригувальний вимірювач 3, який зробивши виміри, видає точне значення вимірюваного навігаційного параметра W(t) Вважаючи, що точність кореляційноекстремальної навігаційної системи, використаної як коригувальний вимірювач, на один - два порядки вище, ніж у коригованого, можна вважати поми лку на його виході рівної нулю, а його вихідний сигнал представити у вигляді U3(t)=X(t) У відраховувальнму пристрої 4 відбувається процес Ui(t)-U3(t)=X(t)+ AX-X(t)=AX, у результаті чого на його виході виділяється сигнал помилки вимірів AU(t)=AX, використовуваний як коригувальний Одночасно з цим, вихідний сигнал йзО) подається на керувальний вхід електронного ключа 5, в результаті чого останній відчиняється і пропускає коригувальний сигнал через запам'ятовувальний пристрій 6 на вхід відраховувального пристрою 2 У відраховувальному пристрої 2 відбувається процес Ui(t)-AU(t)=X(t)+AX-AX=X(t), у результаті чого на його виході виділяється сигнал L)BHx(t)=X(t) Таким чином, у результаті корекції, сигнал на виході відраховувального пристрою 2, як і раніше, дорівнює точному значенню виміряного навігаційного параметра W(t) Після видачі виміряного значення коригувальний вимірювач 3 відключається до наступного сеансу роботи При цьому, сигнал на керувальному вході електронного ключа 5, зникає, у результаті чого він закривається, відключая вхід запам'ятовувального пристрою 6 від виходу відраховувального пристрою 4 Проте, запам'ятоване в запам'ятовувальному пристрої 6, останнє значення коригувального сигналу AU(t) і далі продовжує надходити на відраховувального пристрій 2, тому процес корекції продовжується Так буде продовжуватися до наступного сеансу роботи коригувального вимірювача 3, по закінченні якого значення коригувального сигналу AU(t) на виході запам'ятовувального пристрою 6 поновиться Таким чином, за рахунок запам'ятовування в запам'ятовувальному пристрої останнього значення коригувального сигналу AU(t) у проміжках часу між надходженням сигналів від коригувального вимірювача, процес корекції буде здійснюватися безперервно, починаючи з моменту першого вмикання коригувального вимірювача, що дозволить підвищити точність вимірів комплексною навігаційною системою в цілому Джерела інформації 1 Сосновский А А , Хаймович И А Радиоэлектронное оборудование летательных аппаратов Справочник - М Транспорт, 1987 - С 166-168, (прототип) 2 Справочник по схемотехнике для радиолюбителя / В П Боровский, В И Костенко, В М Михайленко, О Н Партала / Под ред В П Боровского -К Техника, 1987 -С 306-307 3 Криштафович А К , Трифонюк В В Основы промышленной электроники Учебник для электрорадиотехнических и электроприборостроительных специальностей техникумов - М Высшая шк, 1985 -С 159-164 42148 4 Холостов Д И Средства кораблевождения подводных атомоходов - М Военное издательство, 1967 -С 18-21 5 Баклицкий В К , Юрьев А Н Корреляционноэкстремальные методы навигации - М Радио и связь, 1982 - С 10 6 Анализ влияния размеров эталонного и текущего изображений на функционирование корреляционно-экстремальных систем навигации летательных аппаратов / В Н Быков, А М Гричанюк Радиотехника -1998 - Вып 105 -С 122-125 Вщраховувальний пристрій Коригований вимірювач Л Коригувальний вимірювач Вщраховувальний пристрій :лектроннии ключ 6 Запам'ятовувальний пристрій А 7 Блок керування ФІГ. ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Киів-133, бульв Лесі Українки, 26 (044)295-81-42, 295-61-97 Підписано до друку 2002 р Формат 60x84 1/8 Обсяг обл -вид арк Тираж 50 прим Зам УкрІНТЕІ, 03680, Киів-39 МСП, вул Горького, 180 (044) 268-25-22
ДивитисяДодаткова інформація
Назва патенту англійськоюComplex navigation system
Автори англійськоюBakulin Ihor Yevhenovych
Назва патенту російськоюКомплексная навигационная система
Автори російськоюБакулин Игорь Евгеньевич
МПК / Мітки
МПК: G01C 23/00
Мітки: комплексна, система, навігаційна
Код посилання
<a href="https://ua.patents.su/4-42148-kompleksna-navigacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Комплексна навігаційна система</a>
Навігаційна система з охоронними функціями для мобільного об’єкта
Номер патенту: 41818
Опубліковано: 17.09.2001
Автори: Барладін Олександр Володимирович, Барладін Петро Олександрович
МПК: G09B 29/10
Мітки: мобільного, функціями, навігаційна, охоронними, система, об'єкта
Формула / Реферат:
1. Навігаційна система з охоронними функціями для мобільного об'єкта, що містить з'єднані між собою модуль управління, дисплей, картографічний модуль, модуль визначення координат і модуль прийому-передачі радіосигналу, яка відрізняється тим, що обладнана додатково автономним джерелом живлення і модулем стану, з'єднаним із модулем визначення координат, модуль управління обладнаний контролером для мобільного телефону, при цьому блок управління,...
Комплексна система водопостачання теплової електростанції
Номер патенту: 8525
Опубліковано: 30.09.1996
Автори: Сухоруков Георгій Олександрович, Ільєвський Альберт Вікторович, Лозанський Володимир Романович, Васенко Олександр Георгієвич, Фарберов Володимир Генадієвич
МПК: E03B 7/00
Мітки: електростанції, теплової, водопостачання, система, комплексна
Формула / Реферат:
Комплексная система водоснабжения тепловой электростанции, содержащая объединенные в контур охлаждения водохранилище-охладитель, водозаборное сооружение, насосную станцию, напорные трубопроводы, теплообменник, отводящий канал нагретой воды и водоотделитель, к которому присоединены канал продувки и канал сброса тепловых вод в водохранилище-охладитель, отличающаяся тем, что, с целью повышения экономичности системы путем утилизации тепла...
Комплексна система водного господарства енергобіологічного комплексу

Номер патенту: 8526
Опубліковано: 30.09.1996
Автори: Фалалєєва Ганна Миколаївна, Ільєвський Альберт Вікторович, Сухоруков Георгій Олександрович, Васенко Олександр Георгієвич
МПК: C02F 9/00
Мітки: господарства, система, комплексу, водного, комплексна, енергобіологічного
Система автоматичного управління
Номер патенту: 29261
Опубліковано: 16.10.2000
Автор: Самедов Юсіф Фахрат огли
МПК: G05B 11/42
Мітки: система, автоматичного, управління
Формула / Реферат:
Система автоматичного управління, яка містить елемент порівняння, перший вхід якого є входом системи, а другий вхід є з'єднаний з виходом об'єкта управління, вхід якого підключений до виходу суматору, два підсилювача, де вихід першого підсилювача з'єднаний з першим входом суматора, інтегратор, диференціатор, до виходу якого першим входом підключений підсумуючий підсилювач, а його другий вхід зв'язаний з виходом елемента порівняння і входом...
Пристрій вимірювання незворотних деформацій матеріалу
Номер патенту: 10781
Опубліковано: 25.12.1996
Автори: Лонкевич Євген Сергійович, Винницький Володимир Миколайович, Бойко Сергій Ростиславович, Піцан Роман Михайлович
МПК: G01N 27/00, G01B 7/00
Мітки: матеріалу, незворотних, деформацій, вимірювання, пристрій
Формула / Реферат:
Пристрій вимірювання незворотних деформацій матеріалу, що складається з ряду послідовно розташованих секцій, кожна з яких вміщує приводний пристрій з електродвигуном, систему керування, вимірювач швидкості і вимірювач натягу матеріалу, які з'єднані з входами системи керування, сигналізатор лінійної швидкості, до входу якого підімкнений вимірювач швидкості, блок вимірювання модуля пружності, перший вхід якого підімкнений до...
Попередній патент: Дозатор-розподільник палива для двигунів внутрішнього згоряння з розвантажуючим пристроєм
Наступний патент: Спосіб одержання тетраборату літію
Випадковий патент: Плуг