Радіолокатор
Номер патенту: 42178
Опубліковано: 15.08.2003
Автори: Піза Дмитро Макарович, Мокеєв Юрій Геннадійович, Немчин Олександр Федорович
Формула / Реферат
1. Радіолокатор, що містить послідовно з’єднані дуально-поляризовану антену, перемикач прийом/передача, перший канал приймання, пристрій компенсації завад, індикатор та передавач, а також другий канал приймання, підключений до другого виходу антени, який відрізняється тим, що він додатково має когерентний приймач, синхронізатор та послідовно з’єднані перший логарифмічний підсилювач, перший детектор, перший інтегратор, суматор, компаратор, тригер і регульований підсилювач, а також послідовно з’єднані другий логарифмічний підсилювач, другий детектор, другий інтегратор, підключений до другого входу компаратора.
2. Радіолокатор за п. 1, який відрізняється тим, що сигнальний вхід регульованого підсилювача з’єднаний з виходом другого каналу, а вихід підключений до допоміжного входу автокомпенсатора.
3. Радіолокатор за пп. 1,2, який відрізняється тим, що входи першого і другого логарифмічних підсилювачів підключені, відповідно, до виходів першого і другого каналів прийому.
Текст
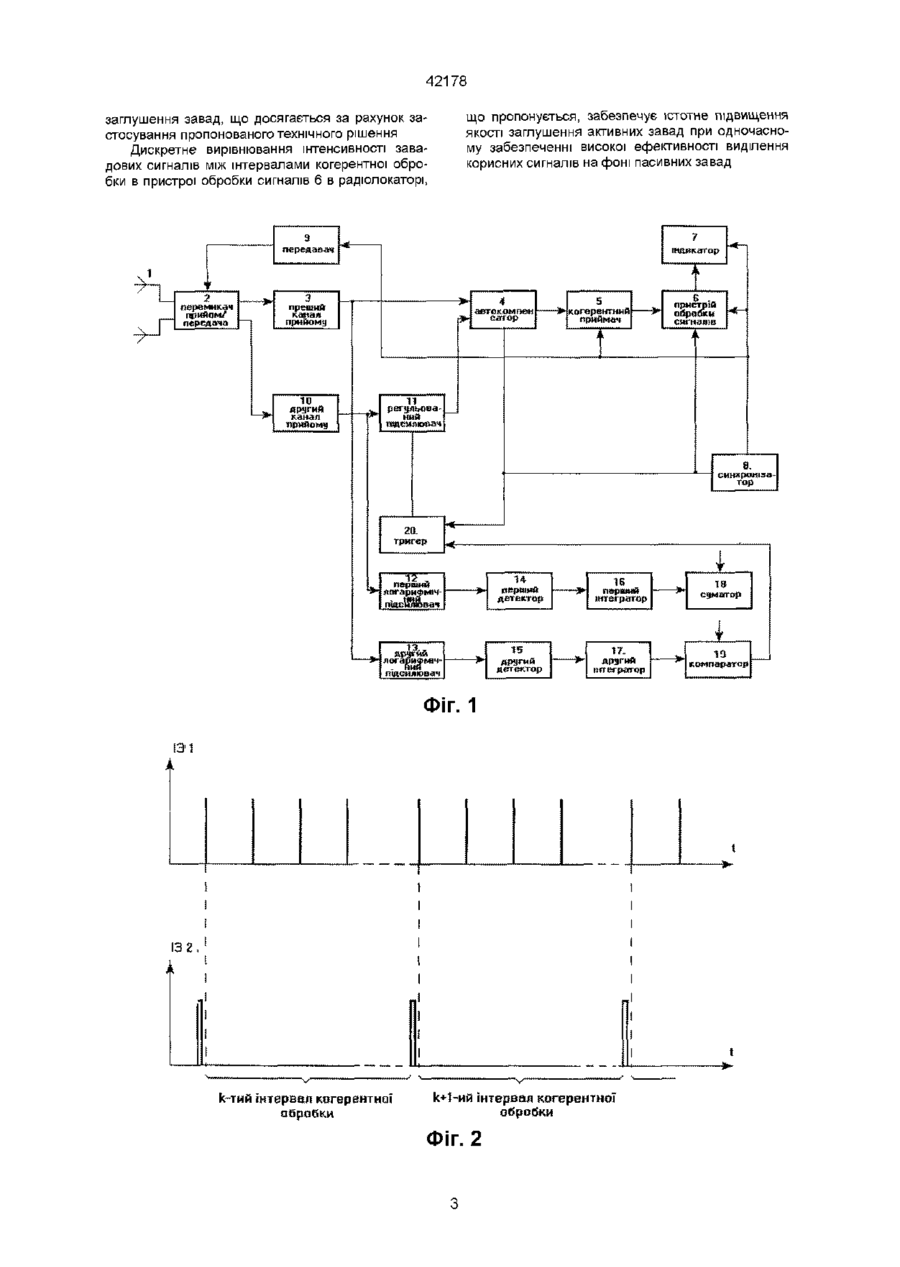
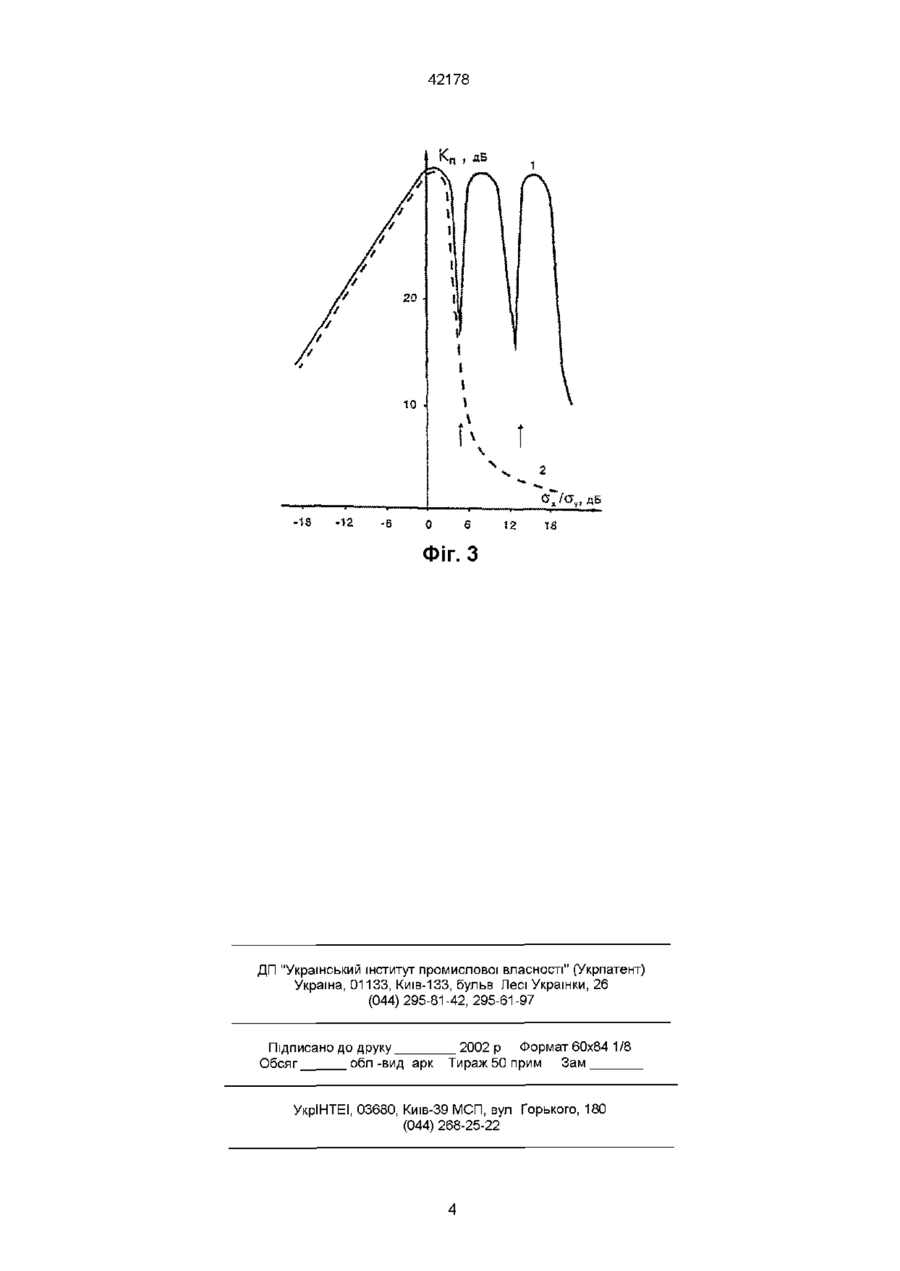
1 Радіолокатор, який містить послідовно сполучені дуально-поляризовану антену, перемикач прийом/передача, перший канал приймання, пристрій компенсації завад, індикатор та передавач, а також другий канал приймання, підключений до другого виходу антени, який відрізняється тим, що він додатково має в своєму складі когерентний приймач, синхронізатор та послідовно сполучені перший логарифмічний підсилювач, перший детектор, перший інтегратор, суматор, компаратор, тригер і регульований підсилювач, а також послідовно сполучені другий логарифмічний підсилювач, другий детектор, другий інтегратор, підключений до другого входу компаратора 2 Радіолокатор за п 1, який відрізняється тим, що сигнальний вхід регульованого підсилювача сполучений з виходом другого каналу, а вихід підключений до допоміжного входу автокомпенсатора 3 Радіолокатор за пп 1 та 2, який відрізняється тим, що входи першого і другого логарифмічних Винахід відноситься до радіотехніки, зокрема, до радіолокації Відомий адаптивний компенсатор активних завад в складі радіолокатора, за патентом США № 4544926, кл G01S7/36, 1985 Приймач цього при Недоліки відомого рішення частково переборені в найбільш близькому за технічною сутністю радіолокаторі в складі завадозахищеної радіолокаційної станції виявлення цілей, за пат РФ № 2040006, кл G01S13/02, 7/36, 1995, що містить дві рознесені по висоті симетричні горизонтальні дуально поляризовані антени, кожна з яких з'єднана зі входом ВІДПОВІДНОГО каналу приймання, пристрій компенсації завад, послідовно поєднані суматор, детектор, відеопідсилювач та індикатор, де до виходу кожного з каналів приймання послідовно підключені амплітудний обмежувач та вузькосмуговий підсилювач проміжної частоти, виходи останніх з'єднані зі входами суматора Недоліком відомого радіолокатора є недостатня ефективність заглушення активних завад в області тих взаємних поляризаційних базисів, коли інтенсивність завадових сигналів в каналах прийому істотно розрізнюється В основу винаходу поставлено задачу підвищення ефективності заглушення активних завад при одночасному забезпеченні ефективного виділення корисного сигналу на фоні пасивних завад Зокрема, задачею, що вирішується винаходом, є розробка пристрою, призначеного для захисту радіолокаційних станцій від активних шумових завад, що діють як по головному, так і по бічних пелюстках діаграми спрямованості антени, і перевершуючого ВІДОМІ технічні рішення по ефективності заглушення завад Крім того, в радіолокаторі, що строю приймає віддзеркалені сигнали ЦІЛІ СПІЛЬНО з сигналами активних перешкод Прийом сигналів здійснюється двома антенами, що мають взаємно ортогональну лінійну поляризацію Ці антени пов'язані з двома приймальними каналами, в кожному з яких є компенсатор із зворотним зв'язком, що заглушує перешкоду і виділяє віддзеркалені-сигнали ЦІЛІ Для виявлення ЦІЛІ вибирають канал, в якому інтенсивність сигналу вища Істотним недоліком цього пристрою є те, що він не може заглушити прицільні радюзавади, тривалість яких рівна або менша тривалості імпульсу зондувального сигналу РЛС Це пояснюється тим, що для автоматичного настроювання в режим подавления перешкоди в процесі роботи адаптивний компенсатор затрачує час, що перевищує тривалість імпульсу віддзеркаленого сигналу ЦІЛІ У результаті цей сигнал не буде подавлений компенсатором, а тривала в часі завада ефективно подавлюється Активні перешкоди у вигляді радіоімпульсів короткої тривалості такий компенсатор заглушити не встигає, так само, як і короткі віддзеркалені сигнали ЦІЛІ І, навпаки, корисні сигнали великої протяжності такий компенсатор буде подавлювати, як завади підсилювачів підключені, ВІДПОВІДНО, ДО ВИХОДІВ першого і другого каналу прийому 00 42178 пропонується, забезпечується ефеїсгивне виділення корисних сигналів при одночасному з активними впливі пасивних завад Зазначена задача вирішується тим, що радіолокатор, який містить послідовно сполучені дуально-поляризовану антену, перемикач прийом/передача, перший канал приймання, пристрій компенсації завад, індикатор та передавач, а також другий канал приймання, підключений до другого виходу антени, згідно з винаходом, додатково має в своєму складі когерентний приймач, синхронізатор та послідовно сполучені перший логарифмічний підсилювач, перший детектор, перший інтегратор, суматор, компаратор, тригер і регульований підсилювач, а також послідовно сполучені другий логарифмічний підсилювач, другий детектор, другий інтегратор, підключений до другого входу компаратора Сигнальний вхід регульованого підсилювача сполучений з виходом другого каналу, а вихід підключений до допоміжного входу автокомпенсатора Входи першого і другого логарифмічних підсилювачів підключені, ВІДПОВІДНО, до виходів першого і другого каналу прийому Керуючий вхід тригера сполучений з керуючим входом автокомпенсатора, другим керуючим входом пристрою обробки сигналів і підключений до другого виходу синхронізатора Суть винаходу пояснюється кресленнями На фіг 1 представлена структурна електрична схема радіолокатора, на фіг 2 наведені часові діаграми роботи синхронізатора, на фіг 3 показані результати оцінок ефективності заглушення активних завад в радіолокаторі, що пропонується Радіолокатор (фіг 1) містить дуально-поляризовану антену 1, перемикач прийом/передача 2, перший канал прийому 3, автокомпенсатор 4, когерентний приймач 5, пристрій обробки сигналів 6 індикатор 7, синхронізатор 8 і передавач 9 До складу радіолокатора також входять другий канал прийому 10, регульований підсилювач 11, перший 12 і другий 13 логарифмічні підсилювачі, перший 14 і другий 15 детектори, перший 16 і другий 17 інтегратори, суматор 18, компаратор 19 та тригер 20 Доцільно розглянути роботу радіолокатора, що пропонується, при дії активної шумової завади по головній пелюстці діаграми спрямованості антени 1 Після випромінювання зондувального сигналу передавачем 9 перемикач прийом/передача 2 підключає антену 1 до першого 3 і другого 10 каналу прийому Прийняті і посилені ортогональнополяризовані складові завади надходять, ВІДПОВІДНО, на основний вхід автокомпенсатора 4 і на вхід регульованого підсилювача 11 При рівності інтенсивності завадових сигналів иу=иу в каналах прийому 3 і 10 регульований підсилювач 11 має деякий номінальний коефіцієнт передачі, при якому забезпечується ефективна компенсація завад в автокомпенсаторі завад 4 Імпульсні корисні сигнали, що мають в загальному випадку ВІДМІННІ від завад поляризаційні параметри, що містяться переважно в першому каналі прийому 3, з виходу автокомпенсатора завад 4 через когерентний приймач 5 надходять на пристрій обробки сигналів 6 В пристрої обробки сигналів 6 і відбувається когерентне накопичення і виявлення сигналів на фоні пасивних завад 3 виходів першого 3 і другого 10 каналів прийому завадові сигнали також надходять на входи логарифмічних підсилювачів 12 і 13 Надалі сигнали детектуються детекторами 14 і 15, інтегруються інтеграторами 16 і 17 3 виходу інтегратора 16 сигнал надходить на суматор 18, де він складається з порогом ІІПОР і надходить на опорний вхід компаратора 19, на другий вхід якого надходить сигнал з інтегратора 17 Якщо сигнали з виходів інтеграторів 16 і 17 однакові, або якщо сигнал з виходу інтегратора 17 трохи (на величину меншу, ніж ІІПОР) перевищує вихідний сигнал інтегратора 16, то на виході компаратора 19 формується сигнал з рівнем логічного 0 Вихідний сигнал компаратора 19 надходить на інформаційний вхід тригера 20 У момент виникнення імпульсу ІЗ 2 (фіг 1 і фіг 2), що надходить на рахувальний вхід тригера 20, його стан не змінюється, і коефіцієнт посилення регульованого підсилювача 11 також залишається незмінним При істотному перевищенні інтенсивності завадового сигналу на виході першого каналу а х »а у внаслідок обмеженого динамічного діапазону вагових коефіцієнтів, що формуються в автокомпенсаторі 4, ефективність заглушення завад знижується При цьому, величина сигналу на виході інтегратора 17 перевищує рівень сигналу, що надходить на опорний вхід компаратора 19 з виходу суматора 18 На виході компаратора 19 формується рівень логічної 1, який в момент виникнення керуючого імпульсу ІЗ 2, що надходить на рахувальний вхід тригера 20, переводить його в одиничний стан При цьому, відбувається дискретне збільшення коефіцієнта передачі регульованого підсилювача 11 На інтервалі існування імпульсу ІЗ 2, що надходить також на керуючий вхід автокомпенсатора завад 4 (див фіг 1), відбувається підстроювання вагових коефіцієнтів останнього При цьому, внаслідок вирівнювання інтенсивності, завадових сигналів, необхідний динамічний діапазон вагових коефіцієнтів, що формуються, автокомпенсатора 4 стає меншим, і ефективність компенсації завадових сигналів істотно зростає 3 фіг 2 витікає, що і вирівнювання сигналів регульованим підсилювачем 11 і підстроювання вагових коефіцієнтів автокомпенсатора 4 проводиться між інтервалами когерентної обробки сигналів в пристрої обробки сигналів 6 Це дозволяє зберегти когерентність сигналів і, як наслідок, забезпечити ефективне виділення сигналів на фоні пасивних завад в радіолокаторі На фіг 3 наведена експериментально отримані залежності коефіцієнта заглушення завад К3 від відношення їх інтенсивності аж/иу, в каналах прийому 3 та 10 ВІДПОВІДНІ залежності отримані шляхом збільшення загасання завадового сигналу в першому (основному) каналі 3 (ЛІВІ ГІЛКИ залежності), або у другому (допоміжному) каналі (праві гілки) Кривою 1 представлена залежність коефіцієнта заглушення завад від відношення інтенсивностей иж/иу пристрою, що пропонується, а кривою 2 - для прототипу Вертикальними стрілками показані відношення аж/иу при яких підсилення регульованого підсилювача 11 дискретно змінювалося на величину, рівну 6 дБ Різниця ординат кривих 1 і 2, поданих на фіг 3, характеризує виграш в коефіцієнті 42178 що пропонується, забезпечує істотне підвищення якості заглушення активних завад при одночасному забезпеченні високої ефективності виділення корисних сигналів на фоні пасивних завад заглушення завад, що досягається за рахунок застосування пропонованого технічного рішення Дискретне вирівнювання інтенсивності завадових сигналів між інтервалами когерентної обробки в пристрої обробки сигналів 6 в радіолокаторі, гндикатор перемикач прийом/ передача З прешнй канал прийомі) 10 другий канал прийому пристрій обробки сигналів 11 регульований підсилювач синирані за тор 20. тригер перший яогариФміч. ний підсилювач дру логариФМіч. ний підсилювач 18 суматор 15 другий детектор 17. другий інтегратор ФІГ. 1 131 ІЗ 2 k-тий інтервал когерентної обробки k+1-ий Інтервал когерентної обробки Фіг. 2 13 компаратор 42178 г г H /і /і 1 I /f ft /t A 1 1 1 M 20 • f/ I \\ l] \ 1 I і \ І* Ї' 1 I I t 10 • \ V \ !\ Ч •18 -Т2 -6 0 6 ] ^ _ _ 12 2 U Фіг. З ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Киів-133, бульв Лесі Українки, 26 (044)295-81-42, 295-61-97 Підписано до друку Обсяг обл -вид арк 2002 р Формат 60x84 1/8 Тираж 50 прим Зам УкрІНТЕІ, 03680, Киів-39 МСП, вул Горького, 180 (044) 268-25-22
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar
Автори англійськоюNemchyn Oleksandr Fedorovych, Mokeiev Yurii Hennadiiovych, Piza Dmytro Makarovych
Назва патенту російськоюРадиолокатор
Автори російськоюНемчин Александр Федорович, Мокеев Юрий Геннадьевич, Пиза Дмитрий Макарович
МПК / Мітки
МПК: G01S 13/42, G01S 7/36, G01S 13/00
Мітки: радіолокатор
Код посилання
<a href="https://ua.patents.su/4-42178-radiolokator.html" target="_blank" rel="follow" title="База патентів України">Радіолокатор</a>
Радіолокатор з пристроєм компенсації завад відніманням
Номер патенту: 32194
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Кудрик Андрій Миколайович, Пророшин Сергій Михайлович
МПК: G01S 7/36
Мітки: пристроєм, компенсації, завад, відніманням, радіолокатор
Текст:
...(в тому числі і кругової) поляризації навіть за відсутністю просторових і часових відмінностей завади і сигналу. Поставлена задача вирішується тим, що в радіолокаторі з пристроєм компенсації завад відніманням, що містить антенну систему, антенний перемикач і пов'язаний з ним передавач імпульсного сигналу, приймач сигналу, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана у вигляді рупорно-параболічної антени з...
Радіолокатор
Номер патенту: 31345
Опубліковано: 15.12.2000
Автори: Побережний Андрій Анатолійович, Кудряшов Валерій Євгенович, Наконечний Володимир Сергійович, Петров Ігор Валерійович
МПК: G01S 13/34
Мітки: радіолокатор
Текст:
...вкодом першого перемно жувача 14 та Б другим входом другого перемножувача 15, а другий вихід ШП 18 їфізь мультиплексор 21 з'єднай Б третій входом першого перемножувала 14 та s входом інвертора 17, вихід останнього а'бднан а третім входом другого перемножувача15. Перший вихід 08П 26 крізь мультиплексор 19 підключен до багатоканального ка релятора 12, а другий вихід ШП 26 з'єднується а входом блока керування £4. Запропонований радіолокатор...
Радіолокатор з компенсатором завад по бокових пелюстках діаграми спрямування антени
Номер патенту: 32192
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
МПК: G01S 7/36
Мітки: пелюстках, бокових, спрямування, діаграми, антени, завад, радіолокатор, компенсатором
Текст:
...з компенсатором завад по бокових пелюстках діаграми спрямування антени, що містить антенну систему з основної приймально-передавальної антени з антенним перемикачем і компенсаційну приймальну антену, передавач імпульсного сигналу, приймачі, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана з однакових рознесених вздовж осі системи антен, перша з яких є основною, а друга - компенсаційною; до складу...
Радіолокатор з пристроєм компенсації завад
Номер патенту: 32193
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Кудрик Андрій Миколайович, Пророшин Сергій Михайлович
МПК: G01S 7/36
Мітки: компенсації, пристроєм, завад, радіолокатор
Текст:
...пристрої використовуються поляризаційні відмінності завади і луна-сигналу цілі. Випромінюється зондуючий сигнал горизонтальної поляризації і луна-сигнал цілі також має в основному горизонтальну поляризацію. Припускається, що завада має лінійну поляризацію і містить як горизонтальну, так і вертикальну складові поля. Фази цих складових однакові, а амплітуди можуть відрізнятися, але не дуже сильно. Запропонований пристрій призначений для...
Радіолокатор з пристроєм захисту від прицільних завад
Номер патенту: 32190
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Кудрик Андрій Миколайович, Пророшин Сергій Михайлович
МПК: G01S 7/36
Мітки: завад, прицільних, радіолокатор, пристроєм, захисту
Текст:
...засновано на управлінні поляризацією випромінюваних і приймальних сигналів таким чином, щоб поляризаційні параметри сигналу суттєво відрізнялися від виміряних поляризаційних характеристик завад, що ускладнює попадання завад в основний канал прийому. Технічна сутність і принцип дії запропонованого пристрою пояснюються фіг. 1,2. На фіг. 1 дана спрощена структурна схема запропонованого радіолокатора. На фіг.2 показаний спрощений ескіз...
Попередній патент: Спосіб і пристрій для встановлення зв’язку через телекомунікаційну мережу між певною групою телеглядачів та визначеною гральною програмою
Наступний патент: Похідні 1,3,4-оксадіазолону та фармацевтична композиція на їх основі
Випадковий патент: Пристрій для катетеризації клиноподібної пазухи