Спосіб визначення електромагнітних параметрів машин змінного струму
Номер патенту: 43931
Опубліковано: 10.09.2009
Автори: Рєзнік Дмитро Володимирович, Калінов Андрій Петрович, Воробейчик Олег Станіславович, Рєзнік Олена Анатоліївна, Родькін Дмитро Йосипович
Формула / Реферат
Спосіб визначення електромагнітних параметрів машин змінного струму, який полягає в тому, що до статорних обмоток нерухомого асинхронного двигуна підключають датчики струму та напруги, а обмотки до джерела зі змінною частотою напруги живлення, задають ряд значень напруги та частоти на виході джерела живлення, знімають показання напруги та струму, визначають повний та еквівалентні активний і реактивний опір схеми заміщення асинхронного двигуна, який відрізняється тим, що при нерухомому роторі асинхронного двигуна на обмотки статора подають напругу Umin=sHUC (sH - номінальне сковзання, UC - напруга мережі живлення) з відносною частотою від 0 до nmin=sHfH (fH - промислова частота мережі живлення), крок зміни відносної частоти 0,001, вимірюють масив значень напруги та струму, визначають залежність повного опору Т-подібної схеми заміщення від відносної частоти, визначають еквівалентний активний та реактивний опори з повного опору, визначають значення активного опору статора R1 відповідно виразу:
![]() ,
,
визначають суму індуктивних опорів контурів намагнічування та статора, як похідну від еквівалентного реактивного опору:
![]()
при частоті n1=sHfH визначають значення XS(n1) та RS(n1), підвищивши напругу живлення до Umax=sKUC (sK - критичне сковзання) та частоту до fmax=50 Гц, визначають активний опір ротора:
![]() ,
,
індуктивні опори статора X1, ротора Х2 та контуру намагнічування Хm визначають з системи рівнянь, що складається з виразів для залежностей еквівалентних активного та реактивного опору та похідної реактивного опору від частоти:
Текст
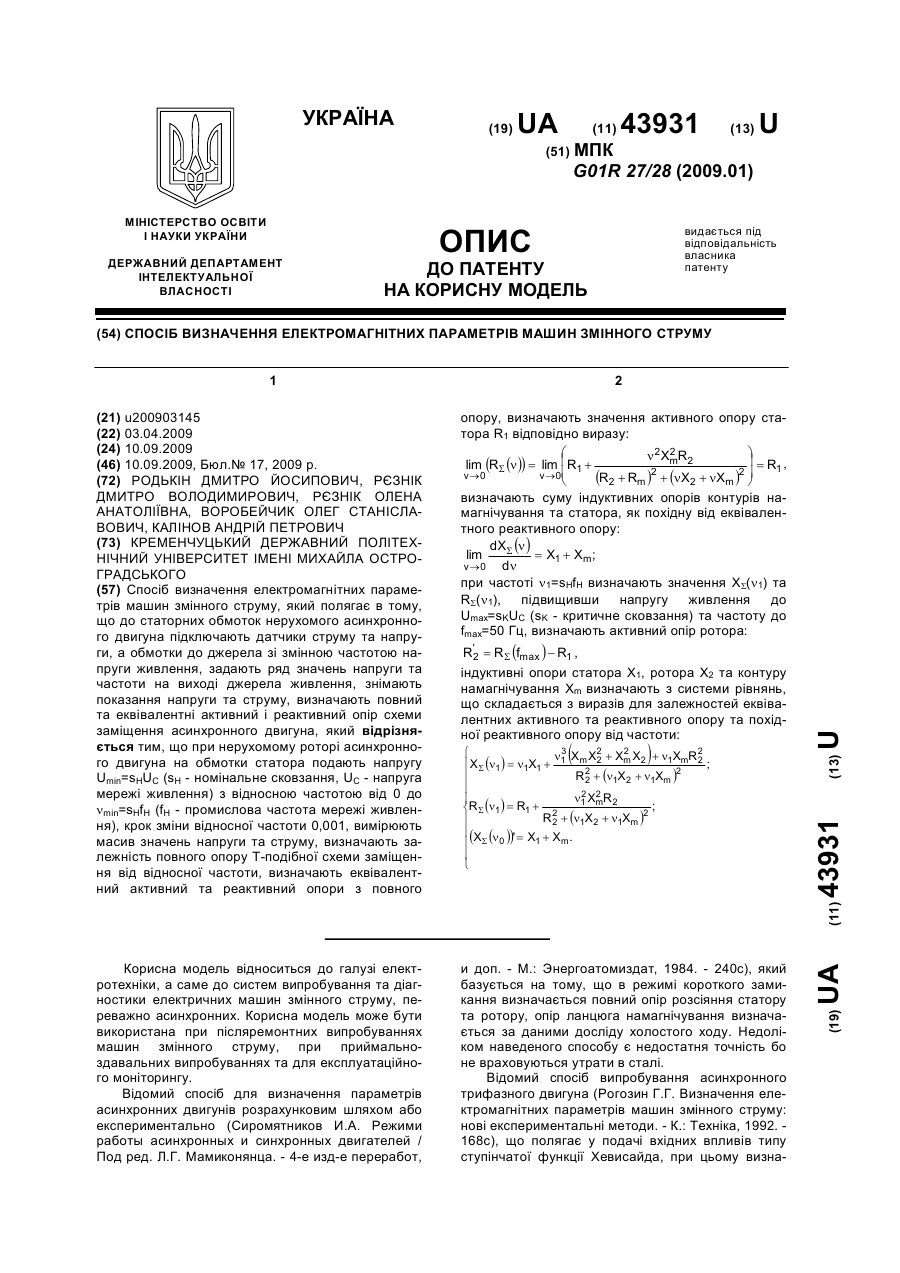
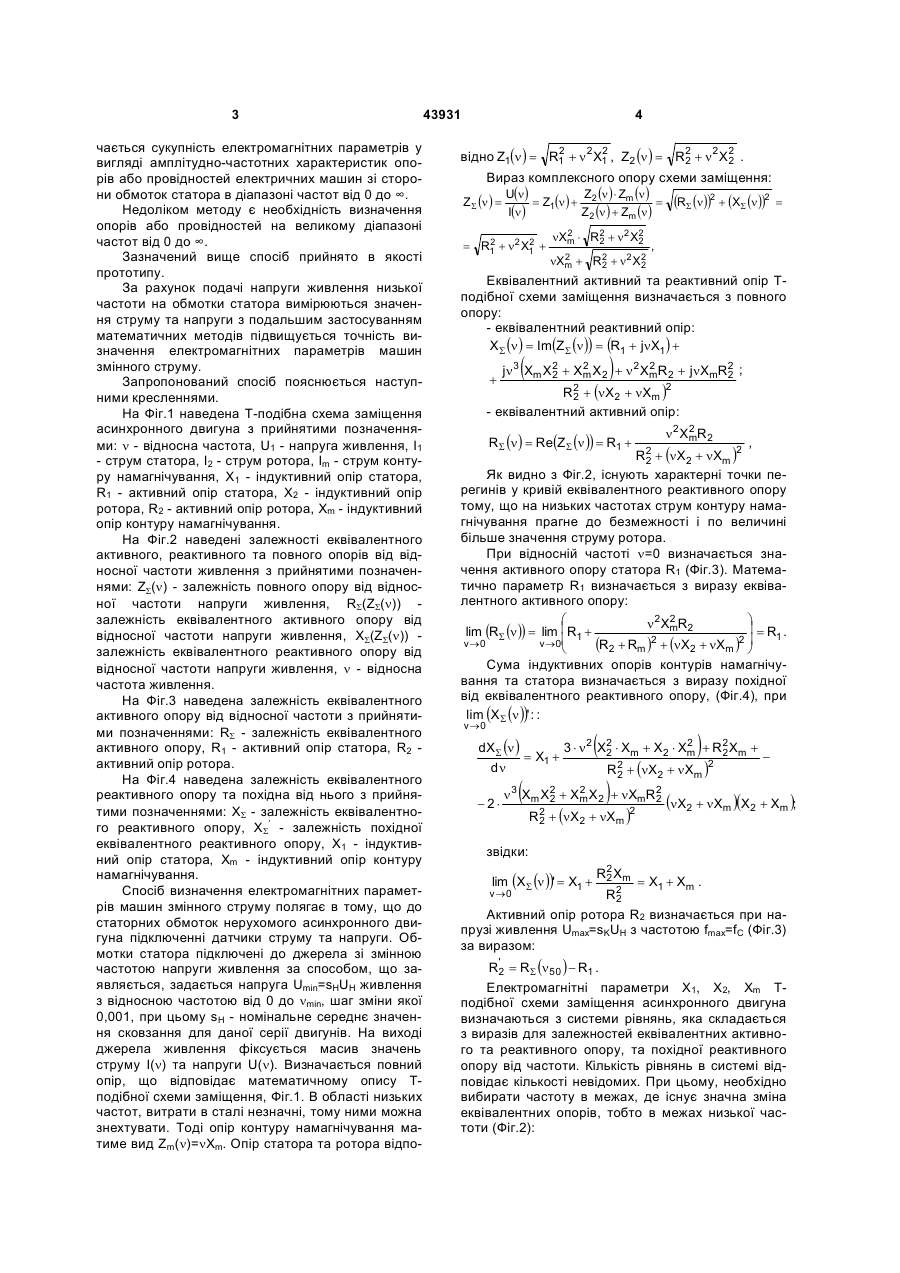
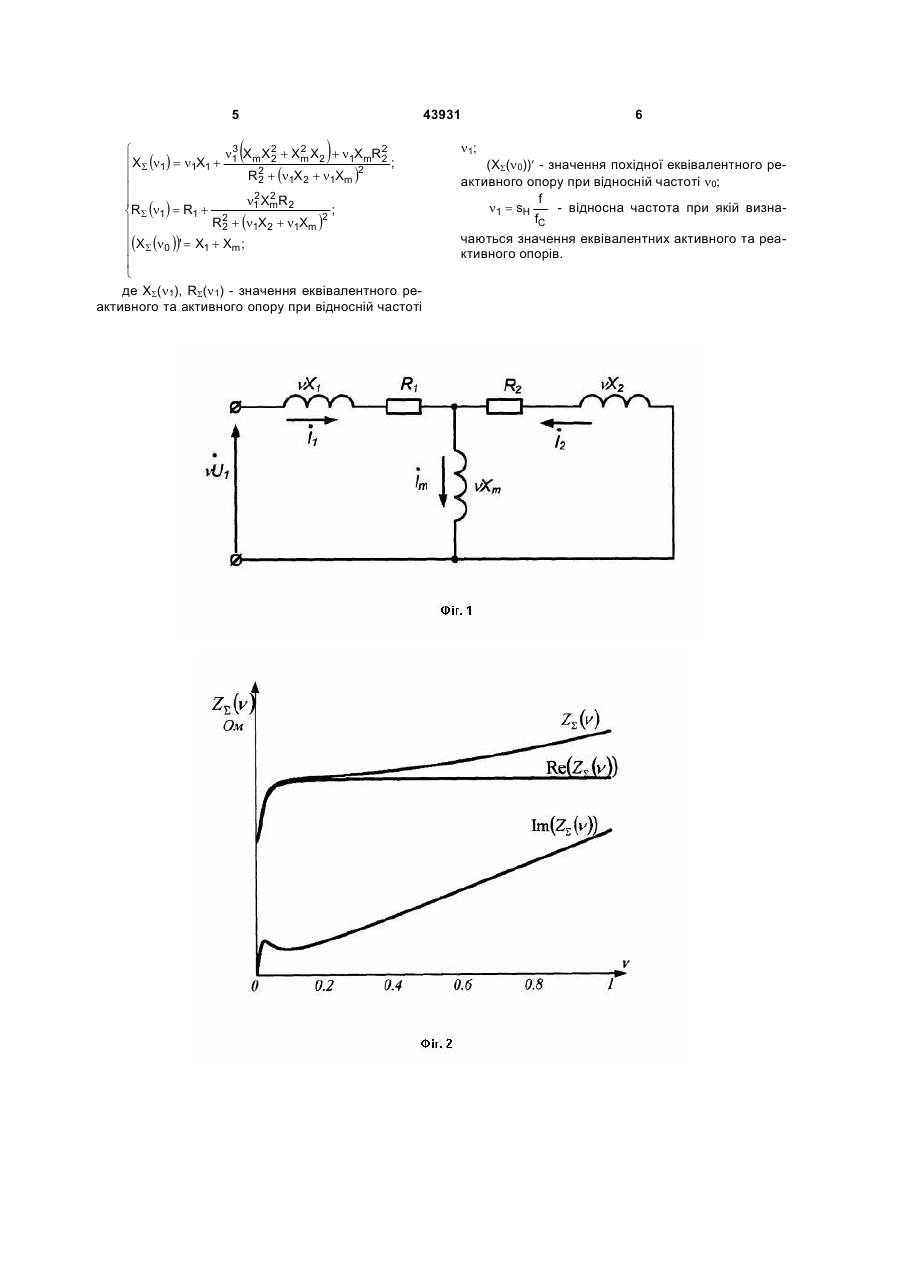
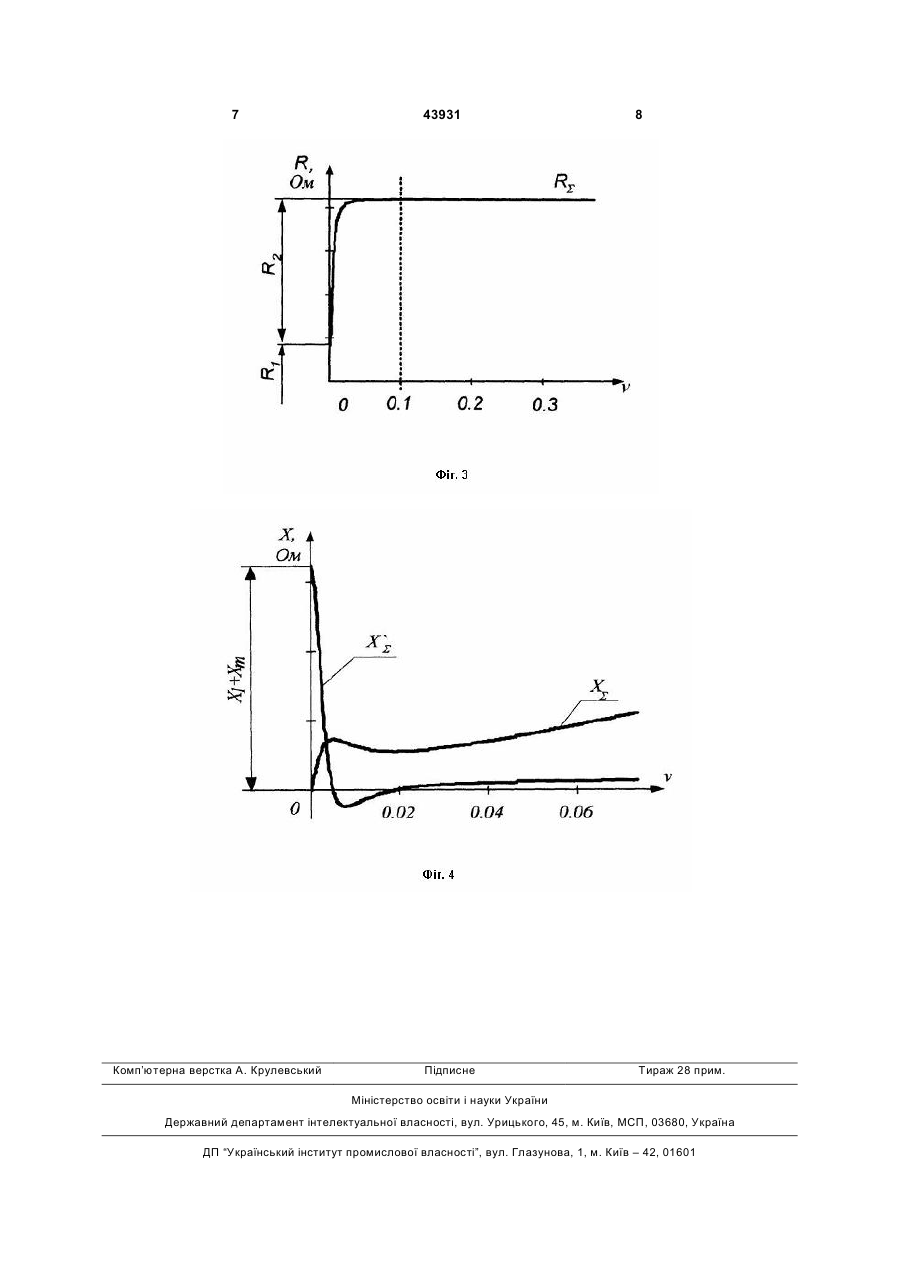
Спосіб визначення електромагнітних параметрів машин змінного струму, який полягає в тому, що до статорних обмоток нерухомого асинхронного двигуна підключають датчики струму та напруги, а обмотки до джерела зі змінною частотою напруги живлення, задають ряд значень напруги та частоти на виході джерела живлення, знімають показання напруги та струму, визначають повний та еквівалентні активний і реактивний опір схеми заміщення асинхронного двигуна, який відрізняється тим, що при нерухомому роторі асинхронного двигуна на обмотки статора подають напругу Umin=sHUC (sH - номінальне сковзання, UC - напруга мережі живлення) з відносною частотою від 0 до nmin=sHfH (fH - промислова частота мережі живлення), крок зміни відносної частоти 0,001, вимірюють масив значень напруги та струму, визначають залежність повного опору Т-подібної схеми заміщення від відносної частоти, визначають еквівалентний активний та реактивний опори з повного 3 чається сукупність електромагнітних параметрів у вигляді амплітудно-частотних характеристик опорів або провідностей електричних машин зі сторони обмоток статора в діапазоні частот від 0 до ∞. Недоліком методу є необхідність визначення опорів або провідностей на великому діапазоні частот від 0 до ∞. Зазначений вище спосіб прийнято в якості прототипу. За рахунок подачі напруги живлення низької частоти на обмотки статора вимірюються значення струму та напруги з подальшим застосуванням математичних методів підвищується точність визначення електромагнітних параметрів машин змінного струму. Запропонований спосіб пояснюється наступними кресленнями. На Фіг.1 наведена Т-подібна схема заміщення асинхронного двигуна з прийнятими позначеннями: n - відносна частота, U1 - напруга живлення, І1 - струм статора, І2 - струм ротора, Іm - струм контуру намагнічування, X1 - індуктивний опір статора, R1 - активний опір статора, Х2 - індуктивний опір ротора, R2 - активний опір ротора, Хm - індуктивний опір контуру намагнічування. На Фіг.2 наведені залежності еквівалентного активного, реактивного та повного опорів від відносної частоти живлення з прийнятими позначеннями: ZS(n) - залежність повного опору від відносної частоти напруги живлення, RS(ZS(n)) залежність еквівалентного активного опору від відносної частоти напруги живлення, XS(ZS(n)) залежність еквівалентного реактивного опору від відносної частоти напруги живлення, n - відносна частота живлення. На Фіг.3 наведена залежність еквівалентного активного опору від відносної частоти з прийнятими позначеннями: RS - залежність еквівалентного активного опору, R1 - активний опір статора, R2 активний опір ротора. На Фіг.4 наведена залежність еквівалентного реактивного опору та похідна від нього з прийнятими позначеннями: ХS - залежність еквівалентного реактивного опору, ХS¢ - залежність похідної еквівалентного реактивного опору, X1 - індуктивний опір статора, Хm - індуктивний опір контуру намагнічування. Спосіб визначення електромагнітних параметрів машин змінного струму полягає в тому, що до статорних обмоток нерухомого асинхронного двигуна підключенні датчики струму та напруги. Обмотки статора підключені до джерела зі змінною частотою напруги живлення за способом, що заявляється, задається напруга Umin=sHUH живлення з відносною частотою від 0 до nmin, шаг зміни якої 0,001, при цьому sH - номінальне середнє значення сковзання для даної серії двигунів. На виході джерела живлення фіксується масив значень струму I(n) та напруги U(n). Визначається повний опір, що відповідає математичному опису Тподібної схеми заміщення, Фіг.1. В області низьких частот, витрати в сталі незначні, тому ними можна знехтувати. Тоді опір контуру намагнічування матиме вид Zm (n)=nXm. Опір статора та ротора відпо 43931 4 2 2 відно Z1(n ) = R1 + n 2 X1 , Z2 (n ) = R2 + n 2 X2 . 2 2 Вираз комплексного опору схеми заміщення: Z S (n ) = Z (n ) × Zm (n ) U(n ) = = Z1(n ) + 2 Z2 (n ) + Zm (n ) I(n ) 2 2 = R1 + n 2 X1 + 2 nX m × R 2 + n 2 X 2 2 2 2 nXm + R2 + n 2 X 2 2 2 (RS (n))2 + (XS (n))2 = , Еквівалентний активний та реактивний опір Тподібної схеми заміщення визначається з повного опору: - еквівалентний реактивний опір: XS (n ) = Im(ZS (n )) = (R1 + jnX1) + + ( ) 2 2 jn 3 Xm X2 + Xm X2 + n 2 XmR2 + jnXmR2 ; 2 2 R2 + (nX2 + nXm ) 2 - еквівалентний активний опір: RS (n ) = Re(ZS (n )) = R1 + 2 2 n 2 XmR2 , R2 + (nX2 + nXm )2 2 Як видно з Фіг.2, існують характерні точки перегинів у кривій еквівалентного реактивного опору тому, що на низьких частотах струм контуру намагнічування прагне до безмежності і по величині більше значення струму ротора. При відносній частоті n=0 визначається значення активного опору статора R1 (Фіг.3). Математично параметр R1 визначається з виразу еквівалентного активного опору: 2 æ ö n 2 XmR2 ÷=R . lim (RS (n )) = lim ç R1 + 1 2 2÷ v ®0 v ®0 ç (R2 + Rm ) + (nX2 + nXm ) ø è Сума індуктивних опорів контурів намагнічування та статора визначається з виразу похідної від еквівалентного реактивного опору, (Фіг.4), при lim (XS (n ))' : : v ®0 ( ) 2 dXS (n ) 3 × n 2 X2 × Xm + X2 × Xm + R2 Xm + 2 2 = X1 + 2 dn R2 + (nX2 + nXm ) 2 -2× ( ) 2 n 3 Xm X2 + Xm X2 + nXmR2 2 2 R2 + (nX2 + nXm )2 2 (nX2 + nXm )(X2 + Xm ); звідки: lim (X S (n ))' = X1 + R 2 Xm 2 = X1 + Xm . R2 2 Активний опір ротора R2 визначається при напрузі живлення Umax=sKUH з частотою fmax=fC (Фіг.3) за виразом: v ®0 R'2 = RS (n 50 ) - R1 . Електромагнітні параметри Х1, Х2, Хm Тподібної схеми заміщення асинхронного двигуна визначаються з системи рівнянь, яка складається з виразів для залежностей еквівалентних активного та реактивного опору, та похідної реактивного опору від частоти. Кількість рівнянь в системі відповідає кількості невідомих. При цьому, необхідно вибирати частоту в межах, де існує значна зміна еквівалентних опорів, тобто в межах низької частоти (Фіг.2): 5 43931 ( ) 2 ì n 3 X X2 + Xm X2 + n1XmR2 2; ï XS (n1) = n1X1 + 1 m2 2 2 R2 + (n1X2 + n1Xm ) ï ï 2 2 n1 XmR2 ï ; íRS (n1) = R1 + 2 R2 + (n1X2 + n1Xm )2 ï ï(X (n ))' = X + X ; 1 m ï S 0 ï î де XS(n1), RS(n1) - значення еквівалентного реактивного та активного опору при відносній частоті 6 n 1; (XS(n0))¢ - значення похідної еквівалентного реактивного опору при відносній частоті n0; f n1 = sH - відносна частота при якій визнаfC чаються значення еквівалентних активного та реактивного опорів. 7 Комп’ютерна верстка А. Крулевський 43931 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of electromagnetic parameters of alternating current machines
Автори англійськоюRodkin Dmytro Yosypovych, Reznik Dmytro Volodymyrovych, Reznik Olena Anatoliivna, Vorobeichyk Oleh Stanislavovych, Kalinov Andrii Petrovych
Назва патенту російськоюСпособ определения электромагнитных параметров машин переменного тока
Автори російськоюРодькин Дмитрий Иосифович, Резник Дмитрий Владимирович, Резник Елена Анатольевна, Воробейчик Олег Станиславович, Калинов Андрей Петрович
МПК / Мітки
МПК: G01R 27/28
Мітки: параметрів, змінного, струму, електромагнітних, спосіб, машин, визначення
Код посилання
<a href="https://ua.patents.su/4-43931-sposib-viznachennya-elektromagnitnikh-parametriv-mashin-zminnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення електромагнітних параметрів машин змінного струму</a>
Спосіб електричного живлення однофазних контактних машин змінного струму
Номер патенту: 86279
Опубліковано: 10.04.2009
Автори: Руденко Петро Михайлович, Кривенко Валерій Георгійович, Кривонос Вадим Петрович, Кучук-Яценко Сергій Іванович, Сидоренко Валерій Михайлович, Микитин Ярослав Іванович, Гавриш Валерій Семенович
МПК: B23K 11/24
Мітки: живлення, струму, змінного, машин, контактних, електричного, спосіб, однофазних
Формула / Реферат:
Спосіб електричного живлення однофазних контактних машин змінного струму, при якому для живлення зварювального трансформатора, розрахованого на частоту F, за допомогою двох трифазних двопівперіодних керованих випрямлячів, які включені зустрічно-паралельно, формують напругу частотою 3F/4, який відрізняється тим, що кожну півхвилю напруги формують послідовною комутацією двох лінійних напруг, при цьому півхвилю однієї полярності починають...
Спосіб визначення споживання енергії у колах змінного струму і пристрій для його здійснення
Номер патенту: 28106
Опубліковано: 16.10.2000
Автори: Лісняк Олександр Григорович, Кліменко Володимир Миколайович, Войцешко Юрій Васильович, Ружніков Євген Володимирович, Заславський Олександр Михайлович, Ганопольський Михайло Ісакович, Клісенко Сергій Володимирович
МПК: G01R 21/06
Мітки: визначення, струму, спосіб, споживання, колах, пристрій, енергії, здійснення, змінного
Формула / Реферат:
1. Спосіб визначення споживання енергії у колах змінного струму, який включає почергову вибірку через задані інтервали часу миттєвих значень струму і напруги у колі, перетворення вибірок у цифрові сигнали, пропорційні вибраним значенням, запам'ятовування отриманих цифрових сигналів, обчислення миттєвих значень потужності з наступним усередненням протягом заданого інтервалу часу, який відрізняється тим, що послідовність вибірки миттєвих...
Комбінований спосіб пуску електричної машини змінного струму

Номер патенту: 75192
Опубліковано: 15.03.2006
Автори: Ленська Олена Олександрівна, ГАЛИНОВСЬКИЙ ОЛЕКСАНДР МИХАЙЛОВИЧ
МПК: H02P 27/04
Мітки: спосіб, пуску, машини, струму, комбінований, електричної, змінного
Формула / Реферат:
1. Комбінований спосіб пуску електричної машини змінного струму, при якому обмотку статора електричної машини закорочують, на обмотку ротора подають напругу змінної частоти, яку збільшують від нуля, ротор розганяють, обмотку статора електричної машини розмикають, на обмотку ротора подають напругу частоти ковзання електричної машини змінного струму, а після досягнення електрорушійною силою, індукованою в обмотці статора полем ротора, величини,...
Трифазна двошарова обмотка статорів електричних машин змінного струму
Номер патенту: 35957
Опубліковано: 10.10.2008
Автори: Невзлін Борис Ісакович, Єрошин Сергій Сергійович, Кривошеєв Євген Ігорович
МПК: H02K 3/12
Мітки: змінного, статорів, машин, двошарова, струму, електричних, трифазна, обмотка
Формула / Реферат:
Трифазна двошарова обмотка статорів електричних машин змінного струму, що складається із секцій, а статор має число пазів, кратне дванадцяти, яка відрізняється тим, що сім дванадцятих загальної кількості секцій обмотки укорочено на одну шосту полюсного розподілу та п'ять дванадцятих загальної кількості секцій обмотки подовжено на одну шосту полюсного розподілу.
Спосіб вмикання електричних машин змінного струму в мережу
Номер патенту: 9908
Опубліковано: 30.09.1996
Автор: Конюхов Олександр Іванович
МПК: H02J 3/00
Мітки: мережу, машин, струму, електричних, вмикання, спосіб, змінного
Формула / Реферат:
(57) 1. Способ включения электрических машин переменного тока в сеть, согласно которому статорные обмотки двух электрических машин включают пофазнопоследовательно, подают на пофазнолоследовательно соединенные электрические машины напряжение сети, результирующий вектор которого меньше суммы номинальных напряжений двух электрических машин, а после разворота электрических машин на каждую из них подают номинальное напряжение путем образования...
Попередній патент: Спосіб діагностики асинхронного двигуна
Наступний патент: Мінеральна кормова добавка для вирощування дубового шовкопряда
Випадковий патент: Спосіб діагностики розвитку остеопорозу