Ультразвукова головка для неруйнівного контролю
Номер патенту: 44984
Опубліковано: 26.10.2009
Автори: Найда Володимир Львович, Мозжухін Анатолій Олександрович, Костенко Олександр Володимирович, Мироненко Володимир Іванович, Гогуля Олександр Миколайович
Формула / Реферат
1. Ультразвукова головка для неруйнівного контролю, що містить корпус для закріплення п'єзоелектричного перетворювача (ПЕП), а також порожнину для подачі контактної рідини, яка відрізняється тим, що головка кінематично зв'язана з двома електромеханічними приводами, один з яких пересуває головку уздовж контрольованого об'єкта, а другий повертає її відносно поверхні контрольованого об'єкта, автоматично утримуючи ПЕП відносно неї завжди в перпендикулярному положенні, при цьому обидва приводи з'єднані між собою через координатні пристрої прямолінійного і кутового руху, а також програмно-координуючий пристрій, синхронізуючий їх дію.
2. Ультразвукова головка за п. 1, яка відрізняється тим, що корпус змонтовано з можливістю його кутового повороту відносно контрольованої поверхні на осі, яка закріплена на кронштейні, жорстко з'єднаному з приводом повороту, а поміж корпусом і приводом розміщений кінематично зв'язуючий їх елемент, наприклад зубчатий сектор або інше.
3. Ультразвукова головка за п. 1, яка відрізняється тим, що привід прямолінійного руху має штангу, на якій закріплений кронштейн приводу кутового повороту таким чином, що забезпечена можливість пересічного пересування кронштейна відносно штанги, а також розміщений пружинний пристрій, з можливістю притискування кронштейна відносно штанги в напрямку контрольованого виробу.
Текст
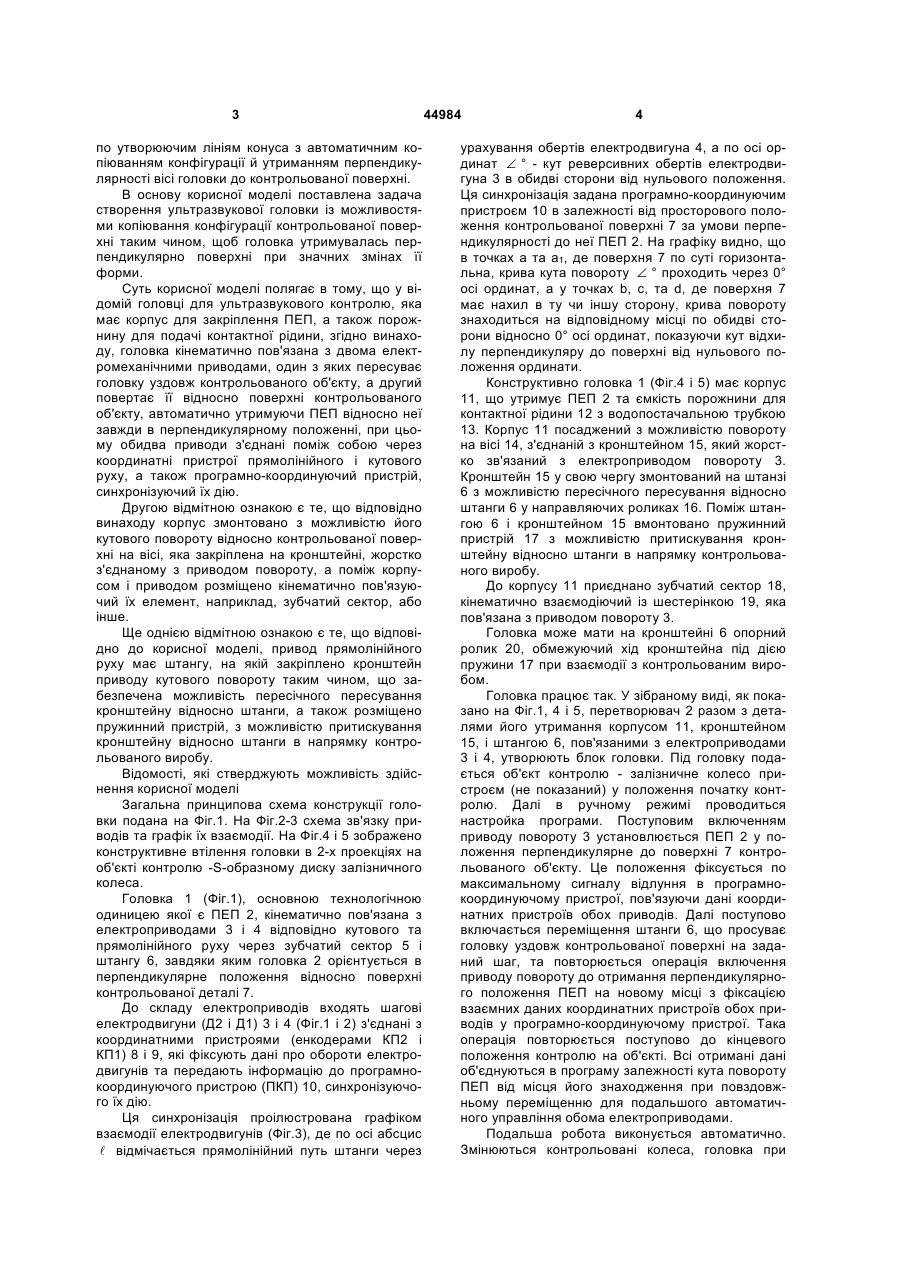
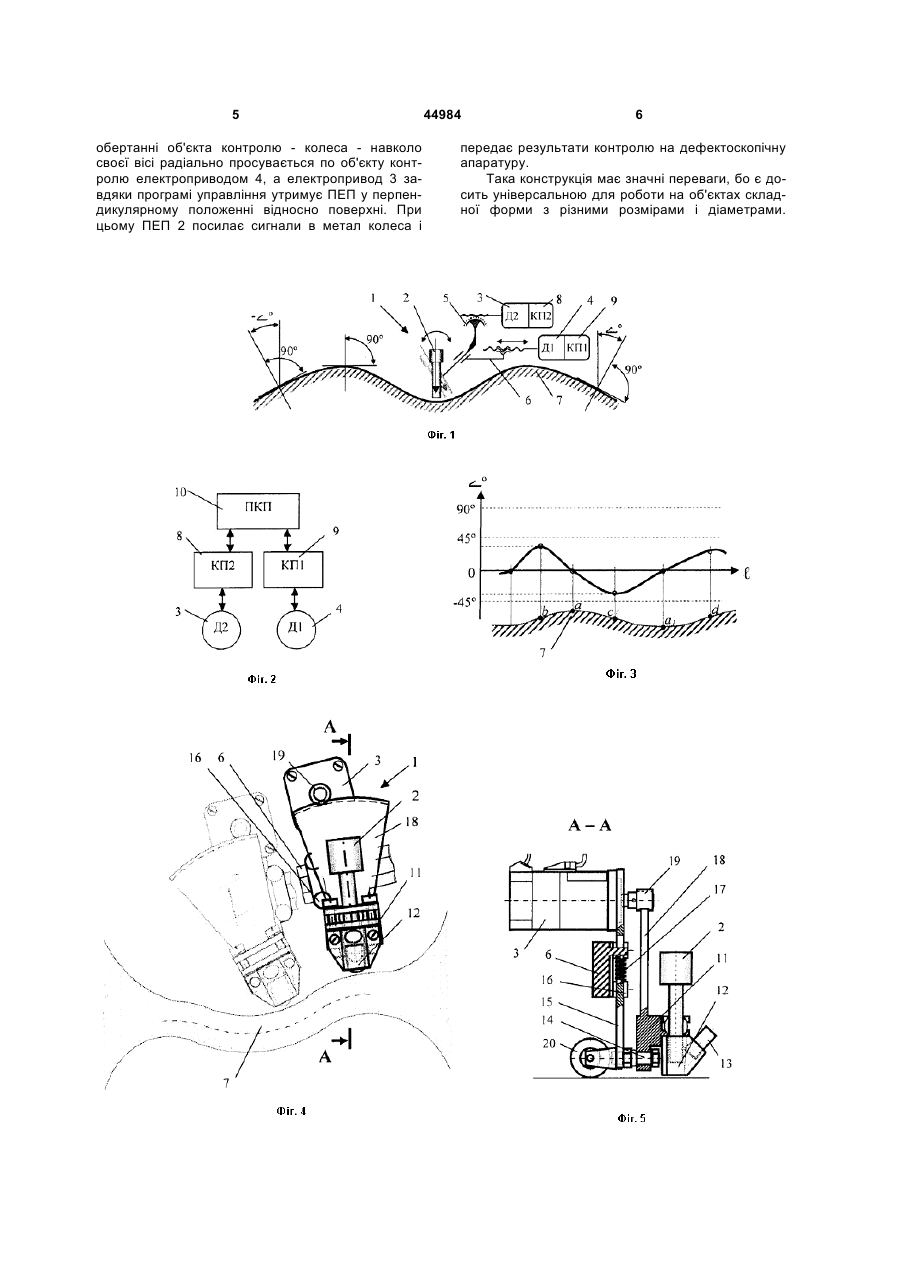
1. Ультразвукова головка для неруйнівного контролю, що містить корпус для закріплення п'єзоелектричного перетворювача (ПЕП), а також порожнину для подачі контактної рідини, яка відрізняється тим, що головка кінематично зв'язана з двома електромеханічними приводами, один з яких пересуває головку уздовж контрольованого об'єкта, а другий повертає її відносно поверхні контрольованого об'єкта, автоматично утримуючи U 2 (19) 1 3 по утворюючим лініям конуса з автоматичним копіюванням конфігурації й утриманням перпендикулярності вісі головки до контрольованої поверхні. В основу корисної моделі поставлена задача створення ультразвукової головки із можливостями копіювання конфігурації контрольованої поверхні таким чином, щоб головка утримувалась перпендикулярно поверхні при значних змінах її форми. Суть корисної моделі полягає в тому, що у відомій головці для ультразвукового контролю, яка має корпус для закріплення ПЕП, а також порожнину для подачі контактної рідини, згідно винаходу, головка кінематично пов'язана з двома електромеханічними приводами, один з яких пересуває головку уздовж контрольованого об'єкту, а другий повертає її відносно поверхні контрольованого об'єкту, автоматично утримуючи ПЕП відносно неї завжди в перпендикулярному положенні, при цьому обидва приводи з'єднані поміж собою через координатні пристрої прямолінійного і кутового руху, а також програмно-координуючий пристрій, синхронізуючий їх дію. Другою відмітною ознакою є те, що відповідно винаходу корпус змонтовано з можливістю його кутового повороту відносно контрольованої поверхні на вісі, яка закріплена на кронштейні, жорстко з'єднаному з приводом повороту, а поміж корпусом і приводом розміщено кінематично пов'язуючий їх елемент, наприклад, зубчатий сектор, або інше. Ще однією відмітною ознакою є те, що відповідно до корисної моделі, привод прямолінійного руху має штангу, на якій закріплено кронштейн приводу кутового повороту таким чином, що забезпечена можливість пересічного пересування кронштейну відносно штанги, а також розміщено пружинний пристрій, з можливістю притискування кронштейну відносно штанги в напрямку контрольованого виробу. Відомості, які стверджують можливість здійснення корисної моделі Загальна принципова схема конструкції головки подана на Фіг.1. На Фіг.2-3 схема зв'язку приводів та графік їх взаємодії. На Фіг.4 і 5 зображено конструктивне втілення головки в 2-х проекціях на об'єкті контролю -S-образному диску залізничного колеса. Головка 1 (Фіг.1), основною технологічною одиницею якої є ПЕП 2, кінематично пов'язана з електроприводами 3 і 4 відповідно кутового та прямолінійного руху через зубчатий сектор 5 і штангу 6, завдяки яким головка 2 орієнтується в перпендикулярне положення відносно поверхні контрольованої деталі 7. До складу електроприводів входять шагові електродвигуни (Д2 і Д1) 3 і 4 (Фіг.1 і 2) з'єднані з координатними пристроями (енкодерами КП2 і КП1) 8 і 9, які фіксують дані про обороти електродвигунів та передають інформацію до програмнокоординуючого пристрою (ПКП) 10, синхронізуючого їх дію. Ця синхронізація проілюстрована графіком взаємодії електродвигунів (Фіг.3), де по осі абсцис l відмічається прямолінійний путь штанги через 44984 4 урахування обертів електродвигуна 4, а по осі ординат ∠ ° - кут реверсивних обертів електродвигуна 3 в обидві сторони від нульового положення. Ця синхронізація задана програмно-координуючим пристроєм 10 в залежності від просторового положення контрольованої поверхні 7 за умови перпендикулярності до неї ПЕП 2. На графіку видно, що в точках а та а1, де поверхня 7 по суті горизонтальна, крива кута повороту ∠ ° проходить через 0° осі ординат, а у точках b, с, та d, де поверхня 7 має нахил в ту чи іншу сторону, крива повороту знаходиться на відповідному місці по обидві сторони відносно 0° осі ординат, показуючи кут відхилу перпендикуляру до поверхні від нульового положення ординати. Конструктивно головка 1 (Фіг.4 і 5) має корпус 11, що утримує ПЕП 2 та ємкість порожнини для контактної рідини 12 з водопостачальною трубкою 13. Корпус 11 посаджений з можливістю повороту на вісі 14, з'єднаній з кронштейном 15, який жорстко зв'язаний з електроприводом повороту 3. Кронштейн 15 у свою чергу змонтований на штанзі 6 з можливістю пересічного пересування відносно штанги 6 у направляючих роликах 16. Поміж штангою 6 і кронштейном 15 вмонтовано пружинний пристрій 17 з можливістю притискування кронштейну відносно штанги в напрямку контрольованого виробу. До корпусу 11 приєднано зубчатий сектор 18, кінематично взаємодіючий із шестерінкою 19, яка пов'язана з приводом повороту 3. Головка може мати на кронштейні 6 опорний ролик 20, обмежуючий хід кронштейна під дією пружини 17 при взаємодії з контрольованим виробом. Головка працює так. У зібраному виді, як показано на Фіг.1, 4 і 5, перетворювач 2 разом з деталями його утримання корпусом 11, кронштейном 15, і штангою 6, пов'язаними з електроприводами 3 і 4, утворюють блок головки. Під головку подається об'єкт контролю - залізничне колесо пристроєм (не показаний) у положення початку контролю. Далі в ручному режимі проводиться настройка програми. Поступовим включенням приводу повороту 3 установлюється ПЕП 2 у положення перпендикулярне до поверхні 7 контрольованого об'єкту. Це положення фіксується по максимальному сигналу відлуння в програмнокоординуючому пристрої, пов'язуючи дані координатних пристроїв обох приводів. Далі поступово включається переміщення штанги 6, що просуває головку уздовж контрольованої поверхні на заданий шаг, та повторюється операція включення приводу повороту до отримання перпендикулярного положення ПЕП на новому місці з фіксацією взаємних даних координатних пристроїв обох приводів у програмно-координуючому пристрої. Така операція повторюється поступово до кінцевого положення контролю на об'єкті. Всі отримані дані об'єднуються в програму залежності кута повороту ПЕП від місця його знаходження при повздовжньому переміщенню для подальшого автоматичного управління обома електроприводами. Подальша робота виконується автоматично. Змінюються контрольовані колеса, головка при 5 обертанні об'єкта контролю - колеса - навколо своєї вісі радіально просувається по об'єкту контролю електроприводом 4, а електропривод 3 завдяки програмі управління утримує ПЕП у перпендикулярному положенні відносно поверхні. При цьому ПЕП 2 посилає сигнали в метал колеса і 44984 6 передає результати контролю на дефектоскопічну апаратуру. Така конструкція має значні переваги, бо є досить універсальною для роботи на об'єктах складної форми з різними розмірами і діаметрами. 7 Комп’ютерна верстка М. Ломалова 44984 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUltra-sonic head for non-destructive control
Автори англійськоюMozhukhin Anatolii Oleksandrovych, Naida Volodymyr Lvovych, Hohulia Oleksandr Mykolaiovych, Kostenko Oleksandr Volodymyrovych, Myronenko Volodymyr Ivanovych
Назва патенту російськоюУльтразвуковая головка для неразрушающего контроля
Автори російськоюМозжухин Анатолий Александрович, Найда Владимир Львович, Гогуля Александр Николаевич, Костенко Александр Владимирович, Мироненко Владимир Иванович
МПК / Мітки
МПК: G01N 29/24
Мітки: неруйнівного, контролю, головка, ультразвукова
Код посилання
<a href="https://ua.patents.su/4-44984-ultrazvukova-golovka-dlya-nerujjnivnogo-kontrolyu.html" target="_blank" rel="follow" title="База патентів України">Ультразвукова головка для неруйнівного контролю</a>
Ультразвукова пошукова головка для контролю матеріалів і зварних швів виробів
Номер патенту: 15168
Опубліковано: 30.06.1997
Автори: Луференко Євген Дмитрович, Довженко Володимир Миколайович, Горський Михайло Миколайович
МПК: G01B 17/02, G01N 29/04, G01B 7/02
Мітки: швів, пошукова, матеріалів, виробів, головка, зварних, ультразвукова, контролю
Формула / Реферат:
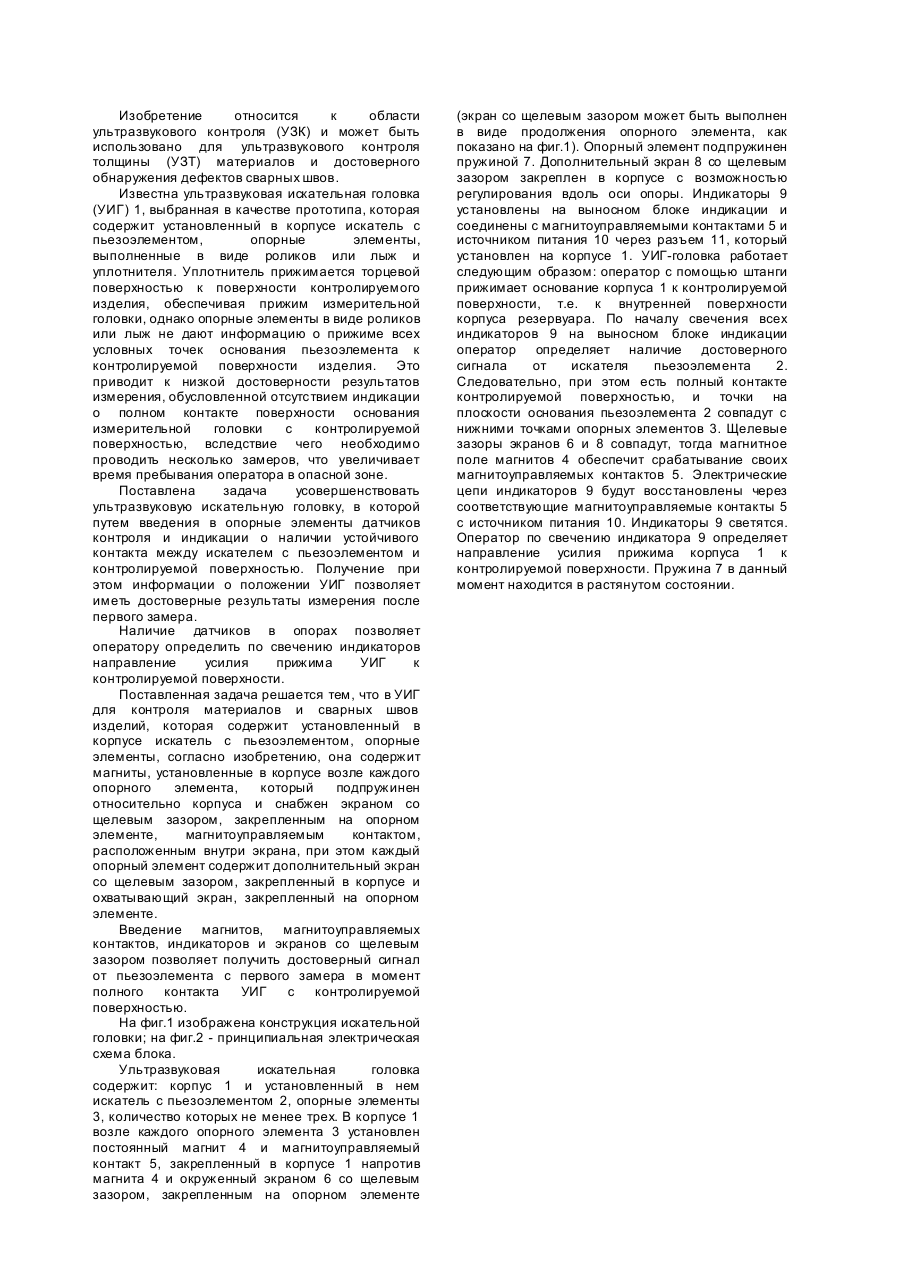
Ультразвуковая искательная головка для контроля материалов и сварных швов изделий, содержащая установленный в корпусе искатель с пьезоэлементом и опорные элементы, отличающаяся тем, что она содержит магниты, установленные в корпусе возле каждого опорного элемента, который подпружинен относительно корпуса и снабжен экраном со щелевым зазором, закрепленным на опорном элементе, магнитоуправляемым контактом, расположенным внутри экрана, при этом...
Ультразвукова головка для деформаційного зміцнення металевих поверхонь
Номер патенту: 13936
Опубліковано: 25.04.1997
Автори: Козлов Олександр Вікторович, Прокопенко Георгій Іванович
МПК: B24B 39/00
Мітки: деформаційного, ультразвукова, металевих, поверхонь, зміцнення, головка
Формула / Реферат:
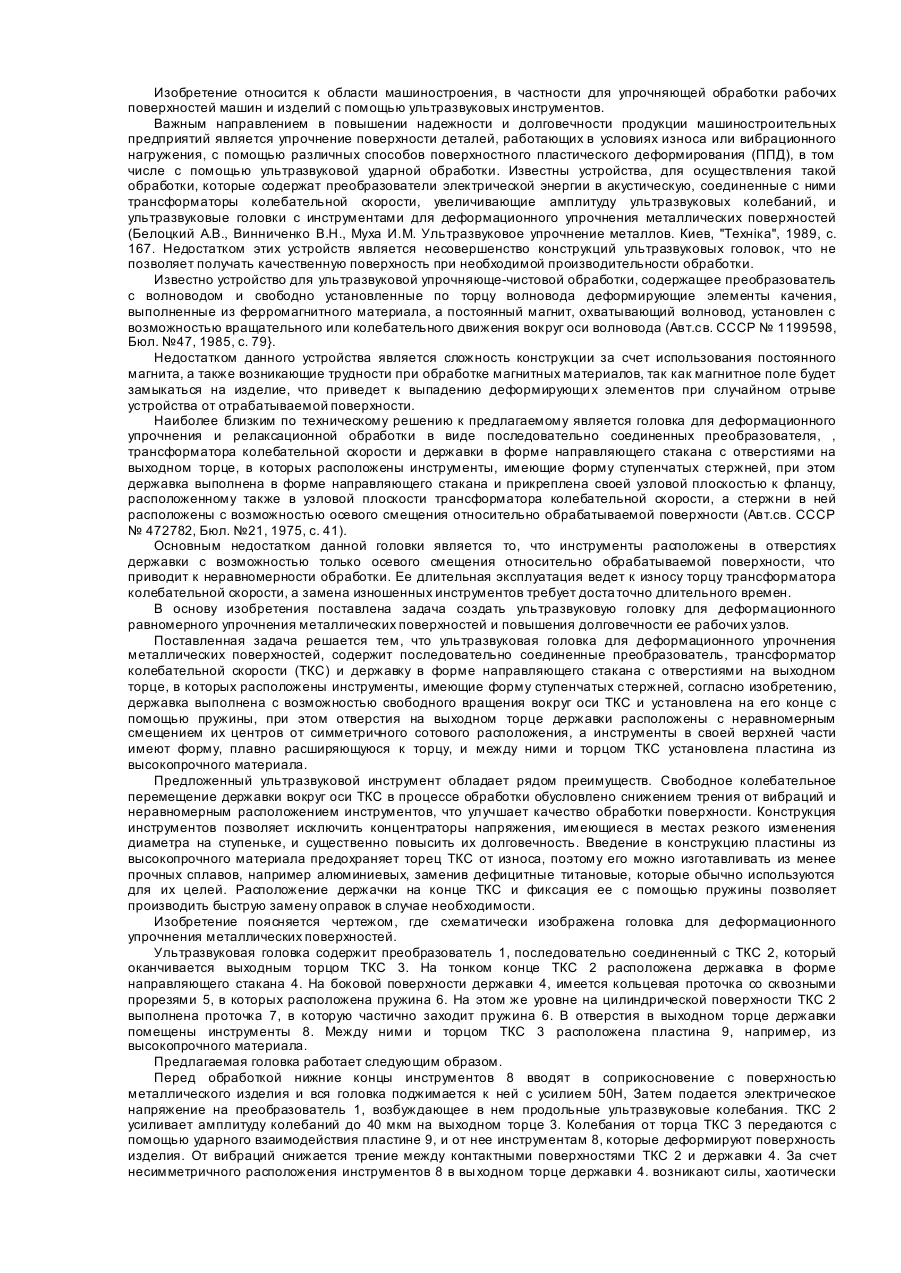
Ультразвуковая головка для деформационного упрочнения металлических поверхностей, содержащая последовательно соединенные преобразователь, трансформатор колебательной скорости и державку в форме направляющего стакана с отверстиями на выходном торце, в которых расположены инструменты, имеющие форму ступенчатых стержней, отличающаяся тем, что державка выполнена с возможностью свободного вращения вокруг оси трансформатора колебательной...
Спосіб неруйнівного контролю сталевих канатів
Номер патенту: 66006
Опубліковано: 15.04.2004
Автори: Грядущий Борис Абрамович, Мялковський Валентин Йосипович, Пушкарьов Вадим Юрійович, Пасюта Валентина Ілларіонівна, Чехлатий Микола Олександрович
МПК: G01B 7/12, G01N 27/82, G01B 7/00
Мітки: сталевих, спосіб, контролю, неруйнівного, канатів
Формула / Реферат:
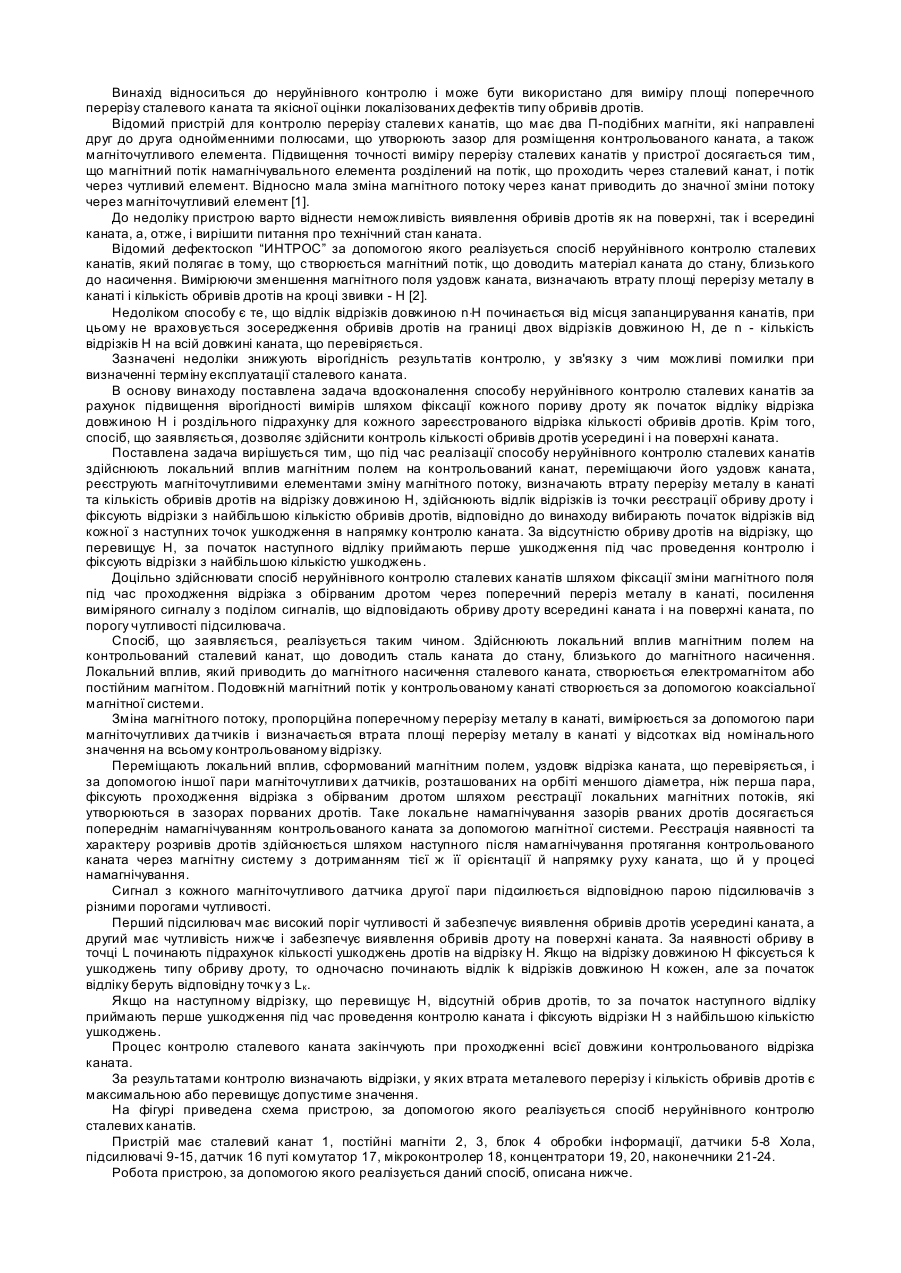
1. Спосіб неруйнівного контролю сталевих канатів, за допомогою якого здійснюють локальний вплив магнітним полем на контрольований канат, переміщаючи його уздовж каната, реєструють магніточутливими датчиками зміну магнітного потоку, визначають втрату поперечного перерізу металу в канаті і кількість обривів дротів на кроці звивки каната Н, здійснюють відлік відрізків Н із точки реєстрації обриву дроту і фіксують відрізки Н з найбільшою...
Спосіб для неруйнівного контролю вимірювання та контролю напруженого стану гігроскопічних матеріалів у процесі гідротермічної обробки
Номер патенту: 15188
Опубліковано: 15.06.2006
Автори: Соколовський Ярослав Іванович, Дендюк Михайло Володимирович, Поберейко Богдан Петрович
МПК: B27K 1/00
Мітки: неруйнівного, гігроскопічних, спосіб, контролю, напруженого, стану, вимірювання, процесі, обробки, матеріалів, гідротермічної
Формула / Реферат:
Спосіб для неруйнівного вимірювання та контролю напруженого стану гігроскопічних матеріалів у процесі гідротермічної обробки, який відрізняється тим, що визначення напружено-деформівного стану здійснюється прямим методом шляхом компенсації різниці деформацій на поверхні гігроскопічного матеріалу з мінімальним миттєвим модулем пружності та еталоні при підведенні зовнішнього механічного навантаження до еталона з метою компенсації різниці...
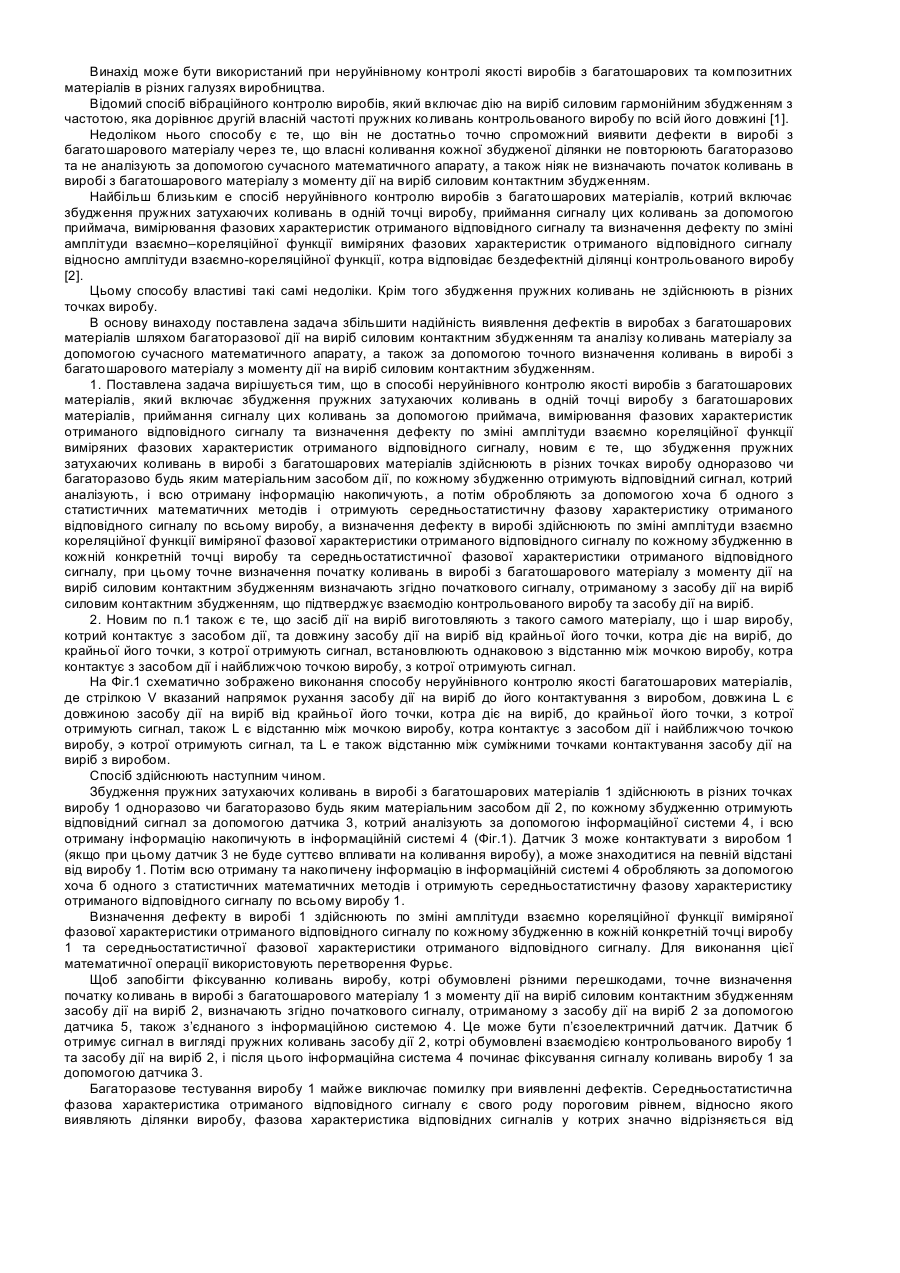
Спосіб неруйнівного контролю якості виробів з багатошарових матеріалів
Номер патенту: 79224
Опубліковано: 25.05.2007
Автор: Мозговой Олександр Всеволодович
МПК: G01N 29/04
Мітки: якості, неруйнівного, контролю, спосіб, виробів, багатошарових, матеріалів
Формула / Реферат:
1. Спосіб неруйнівного контролю якості виробів з багатошарових матеріалів, котрий включаєзбудження пружних затухаючих коливань в одній точці виробу з багатошарових матеріалів, приймання сигналу цих коливань за допомогою приймача, вимірювання фазових характеристик отриманого відповідного сигналу та визначення дефекту по зміні амплітуди взаємно кореляційної функції виміряних фазових характеристик отриманого відповідного сигналу, який...
Попередній патент: Спосіб улаштування перекриття
Наступний патент: Вертикальний кожухотрубний теплообмінник
Випадковий патент: Пристосування для виймання плодів з банки