Пристрій безконтактного вимірювання крутильних коливань обертового вала
Номер патенту: 48201
Опубліковано: 10.03.2010
Автори: Шульженко Микола Григорович, Мєтєльов Леонід Дмитрович, Чугрєєв Анатолій Іванович, Цибулько Вадим Йосипович, Депарма Олександр Вадимович, Єфремов Юрій Геннадійович

Формула / Реферат
Пристрій для безконтактного виміру крутильних коливань обертового вала, що містить безконтактні вимірювальні перетворювачі, установлені в першій і ортогонально в другій площинах радіального перерізу уздовж осі обертання вала на фіксованій відстані від його поверхні, перший і другий помножувачі й суматор, входи суматора з'єднано відповідно з виходами першого й другого помножувачів, а вихід з'єднано із блоком обробки сигналу, який відрізняється тим, що в пристрій уведено формувачі синусоїдального й косинусоїдального сигналів і фазовий детектор, причому вхід формувача синусоїдального сигналу підключено до виходу першого безконтактного вимірювального перетворювача, вихід - до першого входу першого помножувача, другий вхід якого з'єднано з виходом другого безконтактного вимірювального перетворювача, вхід формувача косинусоїдального сигналу підключено до виходу першого безконтактного вимірювального перетворювача, а вихід - до першого входу другого помножувача, другий вхід якого з'єднано з виходом третього безконтактного вимірювального перетворювача, виходи першого й другого помножувачів підключено до першого і другого, відповідно, входів суматора, вихід суматора підключено до першого входу блока обробки сигналу, другий вхід якого з'єднано з виходом фазового детектора, перший вхід фазового детектора з'єднано з виходом першого безконтактного вимірювального перетворювача, а другий вхід - з виходом другого безконтактного вимірювального перетворювача, при цьому перший вимірювальний перетворювач установлено навпроти мітки, нанесеної на вал у площині першого перерізу, а другий і третій у радіальній площині другого перерізу в районі наявного на валу контактного кільця із гвинтовою однозахідною канавкою.
Текст
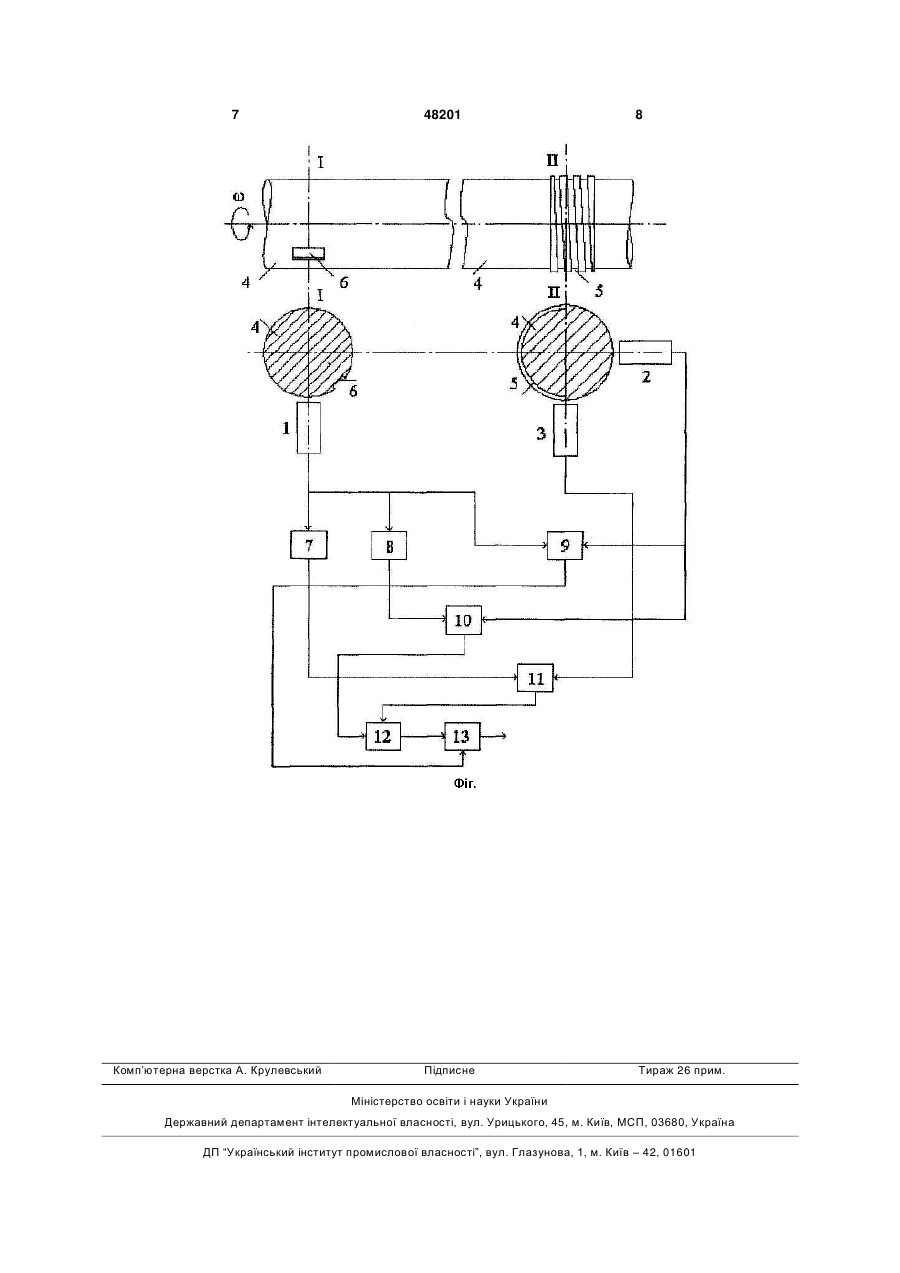
Пристрій для безконтактного виміру крутильних коливань обертового вала, що містить безконтактні вимірювальні перетворювачі, установлені в першій і ортогонально в другій площинах радіального перерізу уздовж осі обертання вала на фіксованій відстані від його поверхні, перший і другий помножувачі й суматор, входи суматора з'єднано відповідно з виходами першого й другого помножувачів, а вихід з'єднано із блоком обробки сигналу, який відрізняється тим, що в пристрій уведено формувачі синусоїдального й косинусоїдального сигналів і фазовий детектор, причому вхід формувача синусоїдального сигналу підключено до виходу першого безконтактного U 2 (19) 1 3 31), що містить по два безконтактних вимірювальних перетворювача, встановлених в ортогональних напрямках у двох площинах радіального перерізу, рознесених уздовж осі обертання вала. З яких, два перетворювачі встановлені по горизонталі кожного перерізу, підключені до входів першого помножувача. Два інші перетворювачі установлені по вертикалі, підключені до входів другого помножувача. Виходи помножувачів підключені до відповідних входів суматора. Вихід суматора підключений до блока обробки сигналу. Отриманий сигнал, пропорційний величині крутильних коливань, після обробки передається для реєстрації й індикації. Недоліком цього пристрою є те, що точність виміру крутильних коливань обертового вала істотно залежить від рівня й гармонійного складу сигналів вібропереміщення в контрольованих перерізах і при слабкому й полігармонійному сигналі фаза оборотної складової (при дисбалансах ротора припустимих значень, що перебувають у межах), відображається з великою похибкою. Відповідно, крутильні коливання виділяються теж з великою похибкою. В основу корисної моделі поставлено задачу розробки пристрою для безконтактного виміру крутильних коливань обертового вала, у якому за рахунок використання додаткових структурних елементів розширюються функціональні можливості пристрою і поліпшується точність виміру. Задача вирішується за рахунок того, що в пристрої для безконтактного виміру крутильних коливань обертового вала, що містить безконтактні вимірювальні перетворювачі, установлено в першій і ортогонально в другій площинах радіального перерізу уздовж осі обертання вала на фіксованій відстані від його поверхні, перший й другий помножувачі й суматор, входи суматора з'єднано відповідно з виходами першого й другого помножувачів, а вихід з'єднано із блоком обробки сигналу, відповідно до корисної моделі, у пристрій уведено формувачі синусоїдального й косинусоїдального сигналів і фазовий детектор, причому вхід формувача синусоїдального сигналу підключено до виходу першого безконтактного вимірювального перетворювача, вихід до першого входу першого помножувача, другий вхід якого з'єднано з виходом другого безконтактного вимірювального перетворювача, вхід формувача косинусоїдального сигналу підключено до виходу першого безконтактного вимірювального перетворювача, а вихід до першого входу другого помножувача, другий вхід якого з'єднано з виходом третього безконтактного вимірювального перетворювача, виходи першого й другого помножувача підключено до першого і другого, відповідно, входів суматора, вихід суматора підключено до першого входу блока обробки сигналу, другий вхід якого з'єднано з виходом фазового детектора, перший вхід фазового детектора з'єднано з виходом першого безконтактного вимірювального перетворювача, а другий вхід з виходом другого безконтактного вимірювального перетворювача, при цьому перший вимірювальний перетворювач установлено навпроти мітки, нанесеної на вал у площині першого перерізу, а другий 48201 4 і третій у радіальній площині другого перерізу в районі наявного на валу контактного кільця з гвинтовою однозахідною канавкою. Введення формувачів синусоїдального й косинусоїдального сигналів дозволяє одержати більш достовірну інформацію про крутильні коливання вала, що підвищує точність виміру пристрою. Введення фазового детектора дозволяє по сигналах першого й другого вимірювальних перетворювачів виділити й нормувати сигнал, що несе інформацію про величину кута скручування і його зміну під дією навантаження (потужності) на валу, й оцінити залишкову деформацію після зняття навантаження. Діагностична оцінка стану вала і його з'єднань здійснюється за зміною відносного кута скручування, величина якого для справного стану вала залишається незмінної при зміні навантаження, а при знятті навантаження повинна відповідати початковому значенню на холостому ходу. При цьому неповернення до початкового значення буде свідчити про наявність непружних і залишкових утомних деформацій вала й зсувів у з'єднаннях. Таке діагностування розширює функціональні можливості пристрою. Для контролю кута скручування всього вала й окремо кожного з валів циліндрів турбоагрегату і їхньої крутильної деформації досить на вал кожного циліндра біля з'єднань нанести мітку й над нею встановити безконтактний вимірювальний перетворювач і підключити його вихід на вхід свого фазового детектора, що розширює функціональні можливості пристрою. Формування від мітки, нанесеної на вал під першим вимірювальним перетворювачем, опорних сигналів синусоїдальної й косинусоїдальної форми із частотою обертання вала й нормованих амплітуд, використання гвинтової однозахідної канавки контактного кільця вала під другим й третім безконтактними вимірювальними перетворювачами, установленими ортогонально один до одного, із сигналами на виходах з нормованими амплітудами, що практично не залежать від величини неврівноваженості, дозволяє підвищити точність і надійність виділення й виміру крутильних коливань вала й, тим самим, підвищити вірогідність діагностування крутильних коливань. При обертанні вала на номінальних оборотах з виходів безконтактних вимірювальних перетворювачів, установлених у другій площині ортогонально над одним із двох контактних кілець вала (ротора генератора) із гвинтовою однозахідною канавкою, одержують сигнали одиничної амплітуди синусоїдальної й косинусоїдальної форми, що майже не залежить від неврівноваженості вала, такі сигнали несуть більш достовірну інформацію про крутильні коливання вала, що поліпшує точність виміру пристрою. На фігурі подано структурну схему запропонованого пристрою. Пристрій містить безконтактні вимірювальні перетворювачі 1, 2, 3 відносних переміщень, установлені 1 у першій і 2, 3 у другій площинах (позначені І-І й ІІ-ІІ) радіального перерізу, обертовий вал 4 з наявними на ньому контактними кільцями й гвинтовою однозахідною канавкою 5, мітку 6, на 5 несену на вал 4 у площині І-І, формувач косинусоїдального сигналу 7, формувач синусоїдального сигналу 8, фазовий детектор 9, помножувачі 10 і 11, суматор 12, блок 13 обробки сигналу. Пристрій працює в такий спосіб. При обертанні вала 4 і проходженні мітки 6 вимірювальний перетворювач 1 формує керуючі імпульси із частотою ω, що дорівнює частоті обертання вала 4, при цьому формувач 7 косинусоїдального сигналу формує по імпульсах опорний нормований сигнал Sy1(t)=A1cosωt, a формувач 8 синусоїдального сигналу формує опорний нормований сигнал Sx1(t)=A1sinωt із частотою ω, що дорівнює частоті обертання вала 4 з нормованою амплітудою сигналу А1. Від гвинтової однозахідної канавки 5, у другому радіальному перерізу вала 4 вимірювальний перетворювач 2 формує нормований сигнал Sx2(t)=А2sin(ωt+θ(t)+φо) на виході, а вимірювальний перетворювач 3 формує нормований сигнал Sy2(t)=А2cos(ωt+θ(t)+φо) на виході із частотою ω, що дорівнює частоті обертання вала 4, і нормованою амплітудою сигналу А2. Сигнали, сформовані від гвинтової канавки 5, містять складову зміни фазового кута θ(t), що несе інформацію про крутильні коливання й кут скручування вала 4 між площинами І-І, ІІ-ІІ й φо - початковий фазовий зсув щодо опорного сигналу сформованого від мітки. Для виділення інформації про крутильні коливання й деформації нормовані й синхронізовані сигнали Sx1(t) і Sx2(t) подаються на входи помножувача 10, а нормовані й синхронізовані сигнали Sy1(t) і Sy2(t) подаються на входи помножувача 11. Після перемножування цих сигналів на виході помножувача 10 одержимо сигнал: Sx(t)=1/2 А1 А2 (cos(θ(t)+φо)-cos(2ωt+θ(t)+φо)), а на виході помножувача 11 одержимо сигнал: Sy(t)=1/2 А1 А2 (cos(θ(t)+φо)+cos(2ωt+θ(t)+φо)). Отримані сигнали Sx(t) і Sy(t) з виходів помножувачів 10 і 11 подаються на входи суматора 12 і в результаті їхнього підсумовування одержимо сигнал: Sxy(t)=А1 А2 cos(θ(t)+φо), функціонально залежний від фазових змін між сигналами, отриманими в другому радіальному перерізу й першому, що несе інформацію про крутильні коливання, а, отже, й деформаціях скручування вала 4. Якщо фазові зміни між сигналами θ(t) під дією зусиль на скручування носять полігармонійний характер із частотами Ωі, то їх можна подати у вигляді θ(t)=φ+ΣФmі sinΩit, де φ=φ(р)+φо - результуючий фазовий зсув при дії зусиль на скручування; Фmі - амплітуда крутильних коливань і-порядку, φ(р) - кут скручування вала, а φо - початкова фаза. При відсутності навантаження на валу, при холостому ходу, фазовий зсув між контрольова 48201 6 ними площинами І-I, ІІ-ІІ вала 4 постійний і буде відповідати початковому зсуву фази φо. Відповідно при навантаженні вала кут φ буде змінюватися, а його складова φ(р)=φ-φо пропорційна потужності на валу. При різких стрибкоподібних змінах навантаження на валу 4 будуть збуджуватися крутильні коливання, інформація про які буде відображатися сигналом з складовими ΣФmі sinΩit. Сформований сигнал Sxy(t) з виходу суматора 12 подається на блок 13 обробки сигналу, у якому по зміні його фази виробляється інформація про крутильні коливання й деформації скручування та видається для індикації й реєстрації. Вона в необхідних випадках може бути використана для діагностування й сигналізації про перевищення припустимих крутильних коливань між площинами І-І, ІІІІ вала 4. При цьому через те, що крутильні коливання не стаціонарні й виникають при порушеннях у роботі генератора й електричних мереж, то для їхнього своєчасного виявлення й визначення богатоциклових динамічних скручувань вала 4 необхідне безперервне формування й обробка сигналу Sxy(t) по запропонованому вище алгоритму. Такий контроль доцільний при контролі й діагностуванні вала і його складових як єдиного цілого. Паралельно для контролю статичних і повільно мінливих кутів скручування роторів вала турбоагрегату імпульсний сигнал вимірювального перетворювача 1 від мітки 6 подається на перший вхід фазового детектора 9, на другий вхід якого подається синусоїдальний сигнал від вимірювального перетворювача 2. Сформований фазовим детектором 9 і нормований сигнал, пропорційний зміні фази між міткою 6 і синусоїдальним сигналом від вимірювального перетворювача 2, подається на другий вхід блока 13 обробки сигналів. При пуску турбоагрегату й досягненні номінальних оборотів на холостому ходу виміряється й фіксується початковий фазовий зсув φо. Надалі при зміні навантаження турбоагрегату це фазовий зсув враховується при визначенні кута скручування. Фазовий зсув в цьому випадку пропорційний потужності на валу. При знятті навантаження, якщо відсутня залишкова утомна деформація й зсув у муфтових з'єднаннях роторів валів, фазний кут повинен дорівнювати φо. Якщо ж фазний кут між сигналами відмінний від φо, то мають місце непружні деформації вала або зсуву в з'єднанні муфт. Це є одним з діагностичних ознак стану вала. Використання пристрою безконтактного виміру крутильних коливань обертового вала сприяє безпечній та надійній експлуатації турбоагрегатів. 7 Комп’ютерна верстка А. Крулевський 48201 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for contact-less measurement of torsion vibrations of rotary shaft
Автори англійськоюShulzhenko Mykola Hryhorovych, Tsybulko Vadym Yosypovych, Meteliov Leonid Dmytrovych, Deparma Oleksandr Vadymovych, Yefremov Yurii Hennadiiovych, Chuhreiev Anatolii Ivanovych
Назва патенту російськоюУстройство бесконтактного измерения крутильных колебаний вращающегося вала
Автори російськоюШульженко Николай Григорьевич, Цибулько Вадим Иосифович, Метелев Леонид Дмитриевич, Депарма Александр Вадимович, Ефремов Юрий Геннадиевич, Чугреев Анатолий Иванович
МПК / Мітки
МПК: G01H 17/00
Мітки: пристрій, обертового, коливань, вимірювання, крутильних, вала, безконтактного
Код посилання
<a href="https://ua.patents.su/4-48201-pristrijj-bezkontaktnogo-vimiryuvannya-krutilnikh-kolivan-obertovogo-vala.html" target="_blank" rel="follow" title="База патентів України">Пристрій безконтактного вимірювання крутильних коливань обертового вала</a>
Пристрій для безконтактного вимірювання параметрів механічних коливань
Номер патенту: 35110
Опубліковано: 15.03.2001
Автор: Хлопов Григорій Іванович
МПК: G01H 9/00, G01N 22/00
Мітки: параметрів, механічних, безконтактного, вимірювання, коливань, пристрій
Формула / Реферат:
1. Пристрій для безконтактного вимірювання параметрів механічних коливань, який містить генератор НВЧ, передавальну та приймальну антени і аналого-цифровий перетворювач, вихід якого з'єднаний з входом, обчислювального пристрою, який відрізняється тим, що введені задавальний генератор, фазовий модулятор, міст НВЧ, перетворювач НВЧ. підсилювач, вимірювач рівня відбитого сигналу та індикатор, вихід генератора НВЧ і вихід приймальної антени...
Пристрій для вимірювання параметрів обертового вала
Номер патенту: 27374
Опубліковано: 15.09.2000
Автор: Панченко Віктор Іванович
Мітки: параметрів, вимірювання, обертового, вала, пристрій
Текст:
...к измерительной схеме, также не обеспечивают требуемой точности ЇА. с. СССР, № 337669, G 01 L 3/24, 1972] Известно устройство для измерения вращающего момента и мощности судовой силовой установки, содержащее накладной магнитоупругий преобразователь, выполненный в виде магнитопровода с четырьмя вертикальными стержнями, причем на двух противоположных стержнях расположена обмотка намагничивания, а на полюсах остальных стержней в воздушном...
Пристрій для вимірювання частотних характеристик коливань обертаємого вала
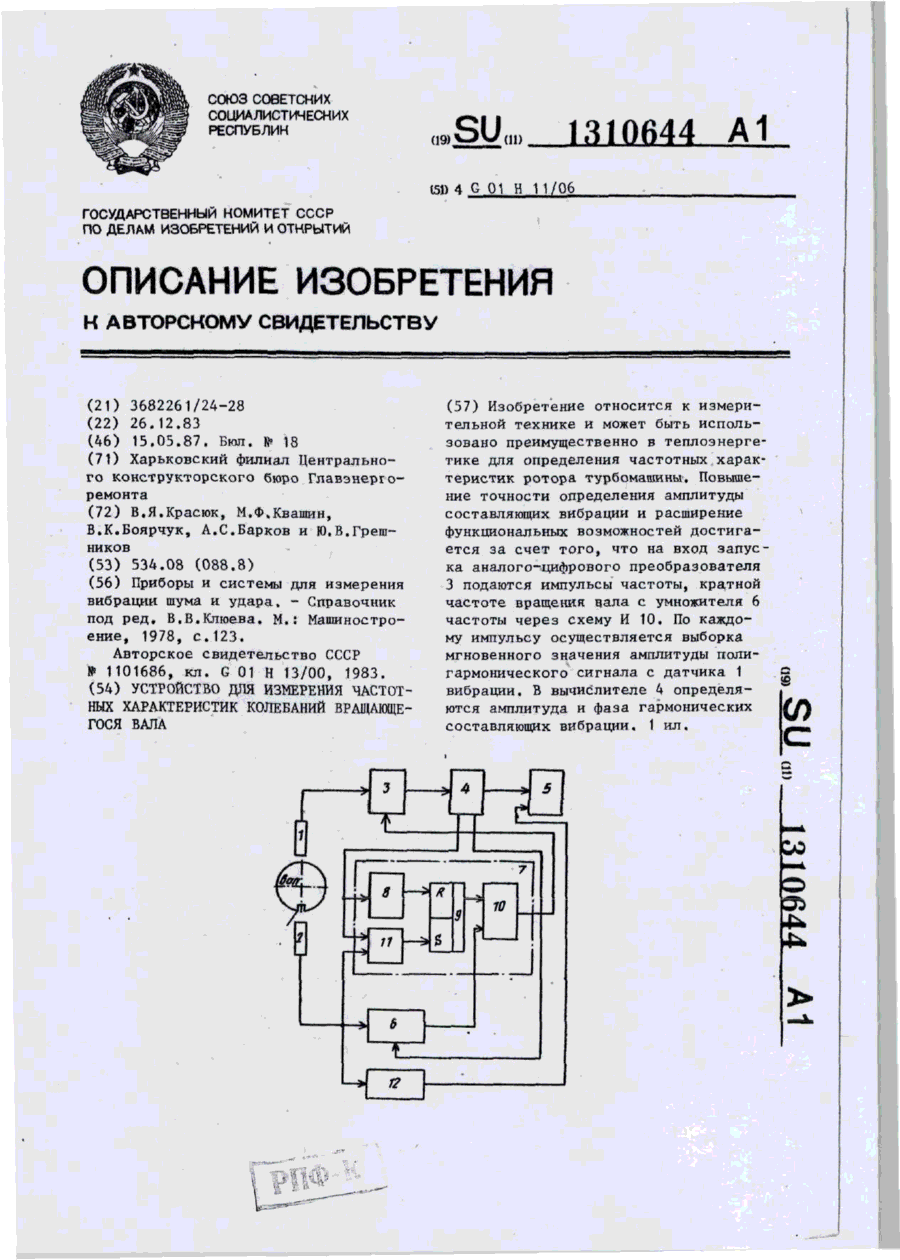
Номер патенту: 1163
Опубліковано: 30.12.1993
Автори: Квашин Михайло Федорович, Грєшников Юрій Валентинович, Красюк Володимир Якович, Боярчук Володимир Кирилович, Барков Олександр Степанович
МПК: H03M 1/00, G01M 7/02, H03K 23/00, G01H 1/00
Мітки: вала, частотних, пристрій, характеристик, обертаємого, вимірювання, коливань
Формула / Реферат:
Формула изобретенияУстройство для измерения частотных характеристик колебаний вращающегося вала, содержащее датчик вибрации вала, аналого-цифровой преобразователь, последовательно соединенные датчик частоты вращения вала, преобразователь частота-код и блок цифровой индикации и регистрации, отличающееся тем, что, с целью повышения точности и расширения функциональных возможностей устройства, в него введены цифровой вычислитель,...
Спосіб безконтактного вимірювання параметрів вібрацій та визначення форм коливань об’єктів
Номер патенту: 48774
Опубліковано: 15.08.2002
Автори: Чоловський Роман Геннадійович, Ройзман Вілен Петрович, Нікітін Олександр Олексійович
МПК: G01H 17/00, G01M 11/00, G01H 9/00, G01M 7/02
Мітки: визначення, спосіб, об'єктів, коливань, вібрацій, безконтактного, параметрів, форм, вимірювання
Формула / Реферат:
Спосіб безконтактного вимірювання параметрів вібрацій та визначення форм коливань об'єктів, який включає реєстрацію оптичними системами електромагнітних хвиль, які відбиті від коливального об'єкта, та визначення параметрів вібрацій об'єкта та його форми коливань, який відрізняється тим, що реєстрацію коливань об'єкта проводять швидкісною відеокамерою, а амплітуду, частоту та форму коливань, як обертових так і необертових об'єктів, визначають...
Пристрій для безконтактного вимірювання температури

Номер патенту: 19737
Опубліковано: 15.12.2006
Автори: Грабко Володимир Віталійович, Грабко Валентин Володимирович
МПК: G01K 13/00
Мітки: вимірювання, пристрій, температури, безконтактного
Формула / Реферат:
Пристрій для безконтактного вимірювання температури, що містить об’єктив, діафрагму, отвір в якій являє собою сектор, доповнений круглим отвором, центр якого співпадає з вершиною сектора та головною оптичною віссю, n дзеркал, закріплених на оптичній лінійці таким чином, що їх площини утворюють кут 45° з головною оптичною віссю, діафрагмуючі отвори дзеркал являють собою еліпси, на одній оптичній осі з якими встановлені n лінз та лінійка n...
Попередній патент: Вібраційний глибокорозпушувач
Наступний патент: Грохот для класифікації шламу
Випадковий патент: Плита залізобетонна підрейкової основи