Спосіб ідентифікації сигналів

Формула / Реферат
Спосіб ідентифікації сигналів, який полягає у вимірюванні сигналів об'єкта і моделі, перетворенні їх у сигнали, пропорційні обмірюваним, який відрізняється тим, що вимірювані сигнали синхронно переводяться в фазочастотну область і визначається кореляційний взаємозв'язок між ними за допомогою керованого коливального контуру, реалізованого на основі ємності, керованої індуктивності і підсилювача, при цьому перший сигнал перетворюється у частотно-модульований за допомогою керованого генератора синусоїдальних коливань і подається безпосередньо у керований коливальний контур, змінюється індуктивність керованого коливального контуру другим сигналом, а підсилений сигнал, що знімається з виходу керованого коливального контуру і характеризує неузгодженість між об'єктом та моделлю, детектується, і виділяється плинне значення квадратичної похибки, яка відраховується від резонансного значення вихідного сигналу керованого коливального контуру, використовуючи як опорний один з вимірюваних сигналів.
Текст
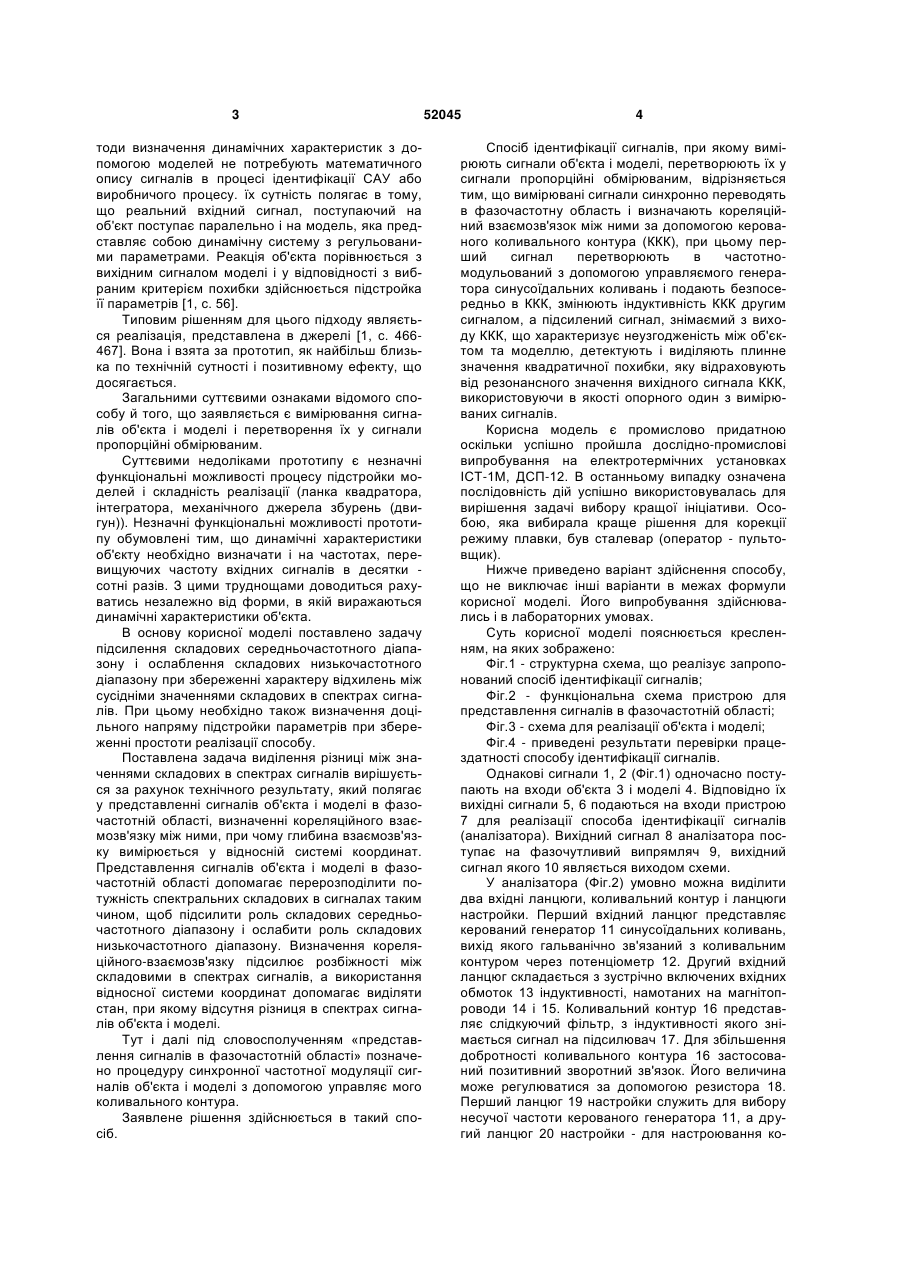
Спосіб ідентифікації сигналів, який полягає у вимірюванні сигналів об'єкта і моделі, перетворенні їх у сигнали, пропорційні обмірюваним, який відрізняється тим, що вимірювані сигнали синхронно переводяться в фазочастотну область і визначається кореляційний взаємозв'язок між ними за допомогою керованого коливального контуру, реалізованого на основі ємності, керованої індук 3 тоди визначення динамічних характеристик з допомогою моделей не потребують математичного опису сигналів в процесі ідентифікації САУ або виробничого процесу. їх сутність полягає в тому, що реальний вхідний сигнал, поступаючий на об'єкт поступає паралельно і на модель, яка представляє собою динамічну систему з регульованими параметрами. Реакція об'єкта порівнюється з вихідним сигналом моделі і у відповідності з вибраним критерієм похибки здійснюється підстройка її параметрів [1, с. 56]. Типовим рішенням для цього підходу являється реалізація, представлена в джерелі [1, с. 466467]. Вона і взята за прототип, як найбільш близька по технічній сутності і позитивному ефекту, що досягається. Загальними суттєвими ознаками відомого способу й того, що заявляється є вимірювання сигналів об'єкта і моделі і перетворення їх у сигнали пропорційні обмірюваним. Суттєвими недоліками прототипу є незначні функціональні можливості процесу підстройки моделей і складність реалізації (ланка квадратора, інтегратора, механічного джерела збурень (двигун)). Незначні функціональні можливості прототипу обумовлені тим, що динамічні характеристики об'єкту необхідно визначати і на частотах, перевищуючих частоту вхідних сигналів в десятки сотні разів. З цими труднощами доводиться рахуватись незалежно від форми, в якій виражаються динамічні характеристики об'єкта. В основу корисної моделі поставлено задачу підсилення складових середньочастотного діапазону і ослаблення складових низькочастотного діапазону при збереженні характеру відхилень між сусідніми значеннями складових в спектрах сигналів. При цьому необхідно також визначення доцільного напряму підстройки параметрів при збереженні простоти реалізації способу. Поставлена задача виділення різниці між значеннями складових в спектрах сигналів вирішується за рахунок технічного результату, який полягає у представленні сигналів об'єкта і моделі в фазочастотній області, визначенні кореляційного взаємозв'язку між ними, при чому глибина взаємозв'язку вимірюється у відносній системі координат. Представлення сигналів об'єкта і моделі в фазочастотній області допомагає перерозподілити потужність спектральних складових в сигналах таким чином, щоб підсилити роль складових середньочастотного діапазону і ослабити роль складових низькочастотного діапазону. Визначення кореляційного-взаємозв'язку підсилює розбіжності між складовими в спектрах сигналів, а використання відносної системи координат допомагає виділяти стан, при якому відсутня різниця в спектрах сигналів об'єкта і моделі. Тут і далі під словосполученням «представлення сигналів в фазочастотній області» позначено процедуру синхронної частотної модуляції сигналів об'єкта і моделі з допомогою управляє мого коливального контура. Заявлене рішення здійснюється в такий спосіб. 52045 4 Спосіб ідентифікації сигналів, при якому вимірюють сигнали об'єкта і моделі, перетворюють їх у сигнали пропорційні обмірюваним, відрізняється тим, що вимірювані сигнали синхронно переводять в фазочастотну область і визначають кореляційний взаємозв'язок між ними за допомогою керованого коливального контура (ККК), при цьому перший сигнал перетворюють в частотномодульований з допомогою управляємого генератора синусоїдальних коливань і подають безпосередньо в ККК, змінюють індуктивність ККК другим сигналом, а підсилений сигнал, знімаємий з виходу ККК, що характеризує неузгодженість між об'єктом та моделлю, детектують і виділяють плинне значення квадратичної похибки, яку відраховують від резонансного значення вихідного сигнала ККК, використовуючи в якості опорного один з вимірюваних сигналів. Корисна модель є промислово придатною оскільки успішно пройшла дослідно-промислові випробування на електротермічних установках ІСТ-1М, ДСП-12. В останньому випадку означена послідовність дій успішно використовувалась для вирішення задачі вибору кращої ініціативи. Особою, яка вибирала краще рішення для корекції режиму плавки, був сталевар (оператор - пультовщик). Нижче приведено варіант здійснення способу, що не виключає інші варіанти в межах формули корисної моделі. Його випробування здійснювались і в лабораторних умовах. Суть корисної моделі пояснюється кресленням, на яких зображено: Фіг.1 - структурна схема, що реалізує запропонований спосіб ідентифікації сигналів; Фіг.2 - функціональна схема пристрою для представлення сигналів в фазочастотній області; Фіг.3 - схема для реалізації об'єкта і моделі; Фіг.4 - приведені результати перевірки працездатності способу ідентифікації сигналів. Однакові сигнали 1, 2 (Фіг.1) одночасно поступають на входи об'єкта 3 і моделі 4. Відповідно їх вихідні сигнали 5, 6 подаються на входи пристрою 7 для реалізації способа ідентифікації сигналів (аналізатора). Вихідний сигнал 8 аналізатора поступає на фазочутливий випрямляч 9, вихідний сигнал якого 10 являється виходом схеми. У аналізатора (Фіг.2) умовно можна виділити два вхідні ланцюги, коливальний контур і ланцюги настройки. Перший вхідний ланцюг представляє керований генератор 11 синусоїдальних коливань, вихід якого гальванічно зв'язаний з коливальним контуром через потенціометр 12. Другий вхідний ланцюг складається з зустрічно включених вхідних обмоток 13 індуктивності, намотаних на магнітопроводи 14 і 15. Коливальний контур 16 представляє слідкуючий фільтр, з індуктивності якого знімається сигнал на підсилювач 17. Для збільшення добротності коливального контура 16 застосований позитивний зворотний зв'язок. Його величина може регулюватися за допомогою резистора 18. Перший ланцюг 19 настройки служить для вибору несучої частоти керованого генератора 11, а другий ланцюг 20 настройки - для настроювання ко 5 ливального контура 16 в резонанс із цією частотою. Вихід підсилювача 17 с виходом аналізатора. Пропоноване технічне рішення можна охарактеризувати наступною послідовністю дій. Розглянемо спочатку механізм одержання сигналів, які мають розбіжності в динаміці. На Фіг.3а представлена схема для одержання таких сигналів. Об'єктом являються ланки, набрані на операційних підсилювачах 21, 22. Вони реалізують передаточну функцію: 1 k W0 p p 1 p k Модель цього об'єкта - ланки 21, 23. Її передаточна функція: 1 Wм p p 1 . На вхід моделі і об'єкта подаються коливання прямокутної форми частотою 1/2 Гц. Амплітуда коливань може змінюватись по мірі необхідності. З виходів Вих 1 і Вих 2, знімаються сигнали, які мають розбіжності в динаміці в області середніх частот. Ця розбіжність регулюється значенням К, яке може задаватись в діапазоні від 10 до 100. Таким чином динамічні відхилення δ можуть знаходитись в діапазоні від 10% до 1%. Сигнали з виходів моделі і об'єкта поступають одночасно на входи 11 і 13 аналізатора (Фіг.2). Дія першого з них змінює частоту генеруємих коливань генератора. В свою чергу, дія другого сигналу на індуктивність коливального контуру 16 призводить до зміни його резонансної частоти. Оскільки зміна частоти генерації і резонансної частоти контура відбувається синфазно, а глибина частотної модуляції по обох входах підібрана однаковою, то при повній ідентичності (однаковості) спектральних складів сигналів в коливальному контурі будуть спостерігатись зміни його резонансної частоти і частоти генерації. Але якщо контур 16 до подачі вхідних сигналів був настроєним в резонанс, то і в процесі цих змін він останеться в резонансному стані із-за повної взаємної компенсації всіх спектральних складових, введених в контур 16. При цьому сигнал, що знімається з виходу аналізатора містить тільки несучу частоту і не містить низькочастотних складових вхідних сигналів. Його амплітуда максимальна. Тому на виході детектора 9 після фільтрації сигнал, що моделює відхилення від резонансного режиму ∆Pp(t), рівний нулю. Це обумовлено відсутністю зрушень фази в коливальному контурі 16 від її значення при резонансному режимі контура. Оскільки вихідний сигнал аналізатора U(t) знімається на підсилювач 17 з індуктивності L коливального контура 16, то для нього в самому простому випадку (при коефіцієнті підсилення рівному одиниці) справедливо: 52045 6 d di dL L i L i i L dt dt dt , де Ψ - потокозчеплення котушки контура 16; i струм в контурі 16; d, ∆ - оператор диференціювання і символ приросту величини. Таким чином при повній ідентичності (однаковості) спектральних складів вхідних сигналів в коливальному контурі можливий резонансний режим, при якому U(t) → max, a низькочастотні складові відсутні L∆i + i∆L = ∆Pp(t) = 0. Це відкриває можливість виявлення навіть незначних неузгодженостей в спектральних складах вхідних сигналів, отже дозволяє вирішувати задачу підстройки моделі в режимі реального часу. Для спрощення відліків одержаної неузгодженості в сигналах моделі і об'єкта виділяється плинне значення середньоквадратичної похибки. Тому вихідний сигнал аналізатора пропускається через фазочутливий випрямляч 9 використовуючи в якості опорного один з вимірюваних сигналів (наприклад 5) (Фіг.1). Для спрощеної перевірки в лабораторних умовах цього положення розглянемо подачу сигналів з моделі і об'єкта (Фіг.3) на аналізатор (Фіг.2). Результати перевірки представлені на Фіг.3б. Верхні залежності (1, 2, 3, 4) (Фіг.3б) представляють залежності амплітудних відхилень вихідного сигнала аналізатора ∆U(B) від амплітуд аналізуємих сигналів U(B) при постійному їх ступені неідентичності 5. Відповідні їм нижні залежності (1', 2', 3', 4') знімались при відключеній ємності С2(0,1 мксФ) (Фіг.3а) коли передаточні функції об'єкта і моделі були однаковими і рівними 1 Wp p 1 . Вони характеризують шум при вимірюванні верхніх залежностей, обумовлений неідентичністю вхідних каналів аналізатора і ланок 22, 23 при відключеній ємності С2. З цих залежностей можна зробити висновок, що величина вихідного сигнала аналізатора, який характеризує ступінь неідентичності аналізуємих сигналів росте з ростом неідентичності аналізуємих сигналів і з ростом величини самих вхідних сигналів. При цьому величина динамічного відхилення, яке припадає на середньочастотні складові по відношенню до всієї амплітуди сигнала виростає при проходженні останнього через аналізатор. Особливо це стає помітним якщо і далі збільшувати амплітуду вхідних сигналів. Джерела інформації: 1. П. Эйкхофф. Основы идентификации систем управления. Оценивание параметров и состояния. - М: Мир. 1975 - 684с. Ut 7 Комп’ютерна верстка Л.Купенко 52045 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethof for signal identification
Автори англійськоюTsyhanash Viktor Yevhrafovych
Назва патенту російськоюСпособ идентификации сигналов
Автори російськоюЦыганаш Виктор Евграфович
МПК / Мітки
МПК: H05B 6/06
Мітки: ідентифікації, спосіб, сигналів
Код посилання
<a href="https://ua.patents.su/4-52045-sposib-identifikaci-signaliv.html" target="_blank" rel="follow" title="База патентів України">Спосіб ідентифікації сигналів</a>
Спосіб вимірювання потужності електромагнітних сигналів та ідентифікації стоматологічних матеріалів
Номер патенту: 34419
Опубліковано: 11.08.2008
Автори: Перегудов Сергій Миколайович, Яненко Олексій Пилипович, Головчанська Олександра Дмитрівна
МПК: A61K 6/02, G01R 29/08
Мітки: стоматологічних, потужності, матеріалів, вимірювання, сигналів, ідентифікації, електромагнітних, спосіб
Формула / Реферат:
Спосіб вимірювання потужності електромагнітних сигналів та ідентифікації стоматологічних матеріалів, який полягає в тому, що електромагнітний сигнал від першої антени та робочого зразка матеріалу надходить через модулятор на радіометричний канал модуляційного радіометра, а сигнал від другої антени та опорного зразка матеріалу відбивається від закритого входу модулятора та подається на радіометричний канал модуляційного радіометра, в якому...
Спосіб ідентифікації сигналів в системах цифрового спектрального аналізу

Номер патенту: 80916
Опубліковано: 12.11.2007
Автор: Селетков Віктор Леонідович
МПК: G10L 11/00, G01R 23/16
Мітки: системах, спосіб, аналізу, ідентифікації, сигналів, цифрового, спектрального
Формула / Реферат:
Спосіб ідентифікації сигналів в системах цифрового спектрального аналізу, що включає низькочастотну фільтрацію на блоках стаціонарності, розділення блоків стаціонарності на сегменти аналізу, формування на кожному сегменті аналізу значення відліків сигналу, формування для кожного сегмента аналізу значення поточних амплітудних спектрів сигналу, формування для кожного блока стаціонарності значення спектральної кореляційної функції за...
Спосіб кепстральної ідентифікації сигналів
Номер патенту: 88208
Опубліковано: 25.09.2009
Автори: Кузнецов Максим Володимирович, Селетков Віктор Леонідович
МПК: G10L 11/00, G01V 1/00, G01H 11/00
Мітки: кепстральної, ідентифікації, сигналів, спосіб
Формула / Реферат:
Спосіб кепстральної ідентифікації сигналів, за яким проводять низькочастотну фільтрацію сигналу в смузі частот аналізу, розділяють сигнал на сегменти аналізу однакової тривалості, узгодженої з інтервалом кореляції сигналу, формують на кожному сегменті аналізу значення дискретних часових відліків сигналу шляхом застосування стандартного аналого-цифрового перетворення з частотою дискретизації за часом, узгодженою зі смугою частот аналізу...
Спосіб ідентифікації цифрової апаратури запису аналогових сигналів та перевірки автентичності цифрових сигналограм
Номер патенту: 54627
Опубліковано: 17.03.2003
Автори: Писаренко Леонід Дмитрович, Орлов Юрій Юрійович, Жаріков Юрій Федорович, Мовчан Тетяна Вікторівна, Рибальський Олег Володимирович, Кирюша Богдан Анатолійович, Геранін Всеволод Олександрович
МПК: G11B 27/36, G11B 27/00
Мітки: перевірки, запису, сигналів, спосіб, цифрової, ідентифікації, сигналограм, аналогових, автентичності, апаратури, цифрових
Формула / Реферат:
1. Спосіб ідентифікації апаратури цифрового запису аналогових сигналів та перевірки автентичності цифрових сигналограм, заснований на порівнянні параметрів сигналів, що відтворюють в аналоговій формі з зразкової та досліджуваної цифрових сигналограм при їх попередньому підсиленні лінійним підсилювачем до максимального рівня, при якому не виникає амплітудних обмежень у сигналах, що підсилюються, та пропусканні підсилених сигналів через фільтр...
Спосіб гомоморфної ідентифікації сигналів
Номер патенту: 87924
Опубліковано: 25.08.2009
Автори: Кузнецов Максим Володимирович, Селетков Віктор Леонідович
МПК: G10L 11/00, G01H 17/00, H04B 11/00
Мітки: гомоморфної, ідентифікації, спосіб, сигналів
Формула / Реферат:
Спосіб гомоморфної ідентифікації сигналів в заданій послідовності взаємозв'язаних операцій перетворення сигналу, за яким проводять низькочастотну фільтрацію сигналу в смузі частот аналізу, розділяють сигнал на сегменти аналізу однакової тривалості, узгодженої з інтервалом кореляції сигналу, формують на кожному сегменті аналізу значення дискретних часових відліків миттєвої щільності потужності сигналу шляхом застосування аналого-цифрового...
Попередній патент: Спосіб видалення окалини з гарячих заготівок валків прокатних станів
Наступний патент: Пристрій для остеосинтезу міжгомілкового синдесмозу
Випадковий патент: Пристрій для лікування гемангіом у дітей