Модульний магніторідинний герметизатор
Формула / Реферат
Модульний магніторідинний герметизатор, який містить нерухомий щодо корпусу приводу магнітний модуль, що складається з кільцевого постійного магніту, полюсних наконечників, внутрішнього і зовнішнього немагнітних кілець, рухомий в осьовому і кутовому напрямках щодо магнітного модуля магнітокеруючий модуль, який виконано у вигляді кільцевого шунтуючого магнітопроводу, на внутрішній бічній поверхні якого виконано гвинтову різь, і магнітну рідину в робочому зазорі між полюсними наконечниками й обхопленим ними валом, який відрізняється тим, що магнітокеруючий модуль встановлено щодо магнітного модуля з утворенням торцевого регульованого зазору між щонайменше одним з полюсних наконечників та кільцевим шунтуючим магнітопроводом, причому один з полюсних наконечників виконано у вигляді обичайки з внутрішнім кільцевим виступом, на внутрішній торцевій поверхні якого з зазором щодо внутрішньої поверхні обичайки встановлено кільцевий постійний магніт, на зовнішній торцевій поверхні другого полюсного наконечника виконано кільцевий бурт, а на зовнішній циліндричній поверхні останнього виконано гвинтову різь, яка відповідна гвинтовій різі, що наявна на внутрішній бічній поверхні кільцевого шунтуючого магнітопроводу.
Текст
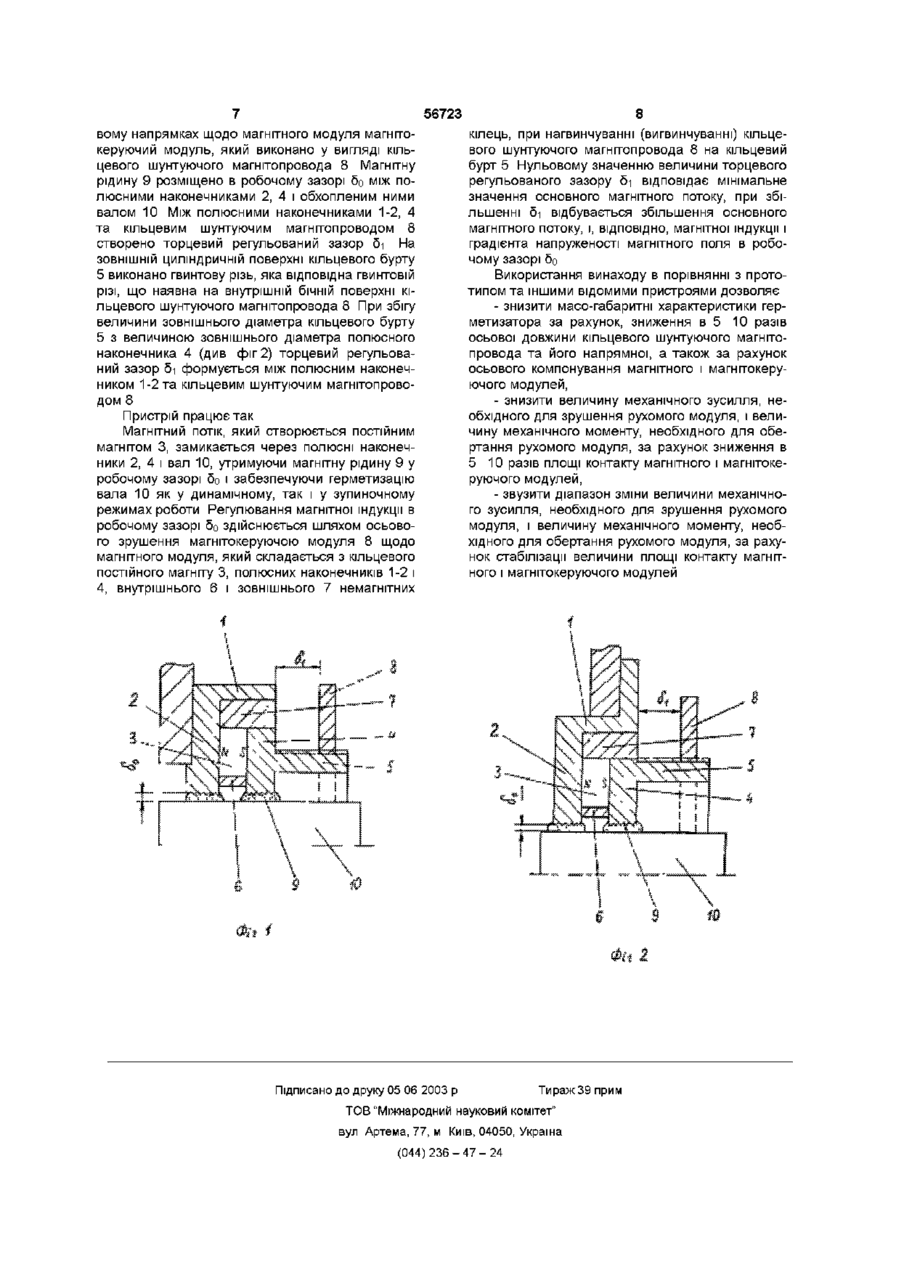
Модульний магніторідиннии герметизатор, який містить нерухомий щодо корпусу приводу магнітний модуль, що складається з кільцевого постійного магніту, полюсних наконечників, внутрішнього і зовнішнього немагнітних кілець, рухомий в осьовому і кутовому напрямках щодо магнітного модуля магнітокеруючий модуль, який виконано у вигляді кільцевого шунтуючого магнітопроводу, на внутрішній бічній поверхні якого виконано гвинтову різь, і магнітну рідину в робо Винахід відноситься до ущільнювальної техніки і може бути використаний для герметизації обертових валів машин і устаткування Відомо про регульовані магніторідинні герметизатори (ас СРСР №773350, МПК F16J15/40, 1979, ас СРСР №1278531, МПК F16J15/40, 1985, ас СРСР №1343157, МПК F16J15/40, 1986), які містять корпус, постійний магніт з полюсними наконечниками і магнітну рідину в робочому зазорі між полюсними наконечниками й обхопленим ними валом, а регулювання магнітної індукції в робочому зазорі забезпечується за допомогою рухомого в осьовому напрямку щодо постійних магнітів полюсного наконечника, зв'язаного пружним елементом з нерухомим полюсним наконечником або з корпусом Проте даним герметизаторам притаманні наступні негативні властивості - недостатня надійність, яка обумовлена переривчастістю руху, перекосом та заклинюванням рухомого полюсного наконечника при його осьовому переміщенні щодо напрямної, наявністю додаткових конструкційних деталей (пружних елементів) між рухомими і нерухомими елементами магнітної системи, значною величиною екс чому зазорі між полюсними наконечниками й обхопленим ними валом, який відрізняється тим, що магнітокеруючий модуль встановлено щодо магнітного модуля з утворенням торцевого регульованого зазору між щонайменше одним з полюсних наконечників та кільцевим шунтуючим магнітопроводом, причому один з полюсних наконечників виконано у вигляді обичайки з внутрішнім кільцевим виступом, на внутрішній торцевій поверхні якого з зазором щодо внутрішньої поверхні обичайки встановлено кільцевий постійний магніт, на ЗОВНІШНІЙ торцевій поверхні другого полюсного наконечника виконано кільцевий бурт, а на ЗОВНІШНІЙ циліндричній поверхні останнього виконано гвинтову різь, яка відповідна гвинтовій різі, що наявна на внутрішній бічній поверхні кільцевого шунтуючого магнітопроводу центриситету (є=1), - підвищені масо-габаритні характеристики, які обумовлені наявністю немагнітного корпуса і значною осьовою довжиною рухомого полюсного наконечника і/або його напрямної, - підвищені вимога до точності виготовлення рухомого елемента та його напрямної Відомо про регульований матніторідинний герметизатор (ас СРСР №1168759, МПК F16J15/40, 1984), що містить постійний магніт з полюсними наконечниками, які обхоплені шунтуючим магнітопроводом, рухомим у радіальному напрямку Регулювання магнітної індукції в робочому зазорі забезпечується шляхом зміщення шунтуючого магнітопровода в радіальному напрямку при цьому на відміну від розглянутих вище герметизаторів з осьовим зміщенням виключаються переривчатість руху, перекіс та заклинювання рухомого магнітопровода Проте даному герметизатору також притаманні негативні властивості - складність конструкції, яка обумовлена наявністю складеного шунтуючого магнітопровода складної геометричної форми, а також регульованого зазору складної геометричної форми та СО 1 (О Ю 56723 елементів його регулювання, - підвищені вимоги до точності виготовлення і підгонки складеного шунтуючого магнітопровода та сполучених з ним елементів магнітної системи, - недостатня надійність, яка обумовлена значною величиною механічного зусилля для відриву шунтуючого магнітопровода від полюсних наконечників при його зміщенні в радіальному напрямку Відомо також про регульовані магаїторідинні герметизатори (ас СРСР №1537941, МПК F16J15/40, 1988, ас СРСР №1622687, МПК F16J15/40, 1990, пат РФ №2027929, МПК F16J15/00, F16J15/40, 1991), що містять корпус і магнітний вузол у вигляді постійного магніту з полюсними наконечниками, який обхоплений шунтуючим магнітопроводом Регулювання магнітної індукції в робочому зазорі забезпечується за допомогою шунтуючого магнітопровода, рухомого в осьовому напрямку щодо полюсних наконечників На відміну від герметизаторів з рухомі їм полюсним наконечником у даних герметизаторах немає пружного елемента між рухомими і нерухомими частинами Магнітної системи, а також знижена величина ексцентриситету (вона складає звичайну для магніторідинних герметизаторів величину (є=0,1 0,3), що підвищує їхню надійність у роботі) На відміну від герметизатора за а с СРСР №1168759 в даних герметизаторах немає регульованого зазору - складної геометричної форми та елементів його регулювання, а шунтуючий магнітопровод складається з однієї деталі, що спрощує конструкцію герметизаторів Проте даним герметизаторам також притаманні негативні властивості - недостатня надійність, яка обумовлена переривчастістю руху, перекосом і заклинюванням рухомого шунтуючого магнітопровода при його осьовому переміщенні щодо полюсних наконечників, - підвищені масо-габаритні характеристики, які обумовлені наявністю немагнітного корпусу та значною осьовою довжиною рухомого шунтуючого магнітопровода, - підвищені вимоги до точності виготовлення і підгонки рухомого шунтуючого магнітопровода та сполучених з ним елементів магнітної системи Відомо про регульований магніторідинний герметизатор (пат України №38664 A, F16J15/40, 2000), що містить корпус, два радіальнонамагнічених пояси, які набрані з окремих призматичних постійних магнітів, ЗОВНІШНІ ПОЛЮСИ яких з'єднані між собою за допомогою магнітопроводного елемента, полюсні наконечники, що примикають до внутрішніх полюсів постійних магнітів, і магнітну рідину в робочих зазорах Магнітопроводний елемент, який з'єднує ЗОВНІШНІ полюси постійних магнітів, виконано у вигляді окремих магнітопровод них пластин, рухомих в осьовому напрямку щодо постійних магнітів, причому кожна пластина з'єднує постійний магніт з одного магнітного пояса з протилежним постійним магнітом іншого магнітного пояса У порівнянні з розглянутими вийде герметизаторами даний герметизатор відрізняється простотою конструкції, не вимагає підвищеної точності виго товлення рухомого магнітопроводного елемента, який складається з магнітопровод них пластин простої геометричної форми, відсутні переривчатість руку, перекос та заклинювання рухомого елемента, тому що поверхня тертя є плоскою, а механічне зусилля, необхідне для зміщення магнітопроводного елемента, розподілено між багатьма пластинами Проте і даному герметизатору притаманні деякі негативні властивості - підвищені масо-габаритні характеристики, які обумовлені наявністю немагнітного корпусу і значною осьовою довжиною рухомого замикаючого магнітопровода (яка приблизно дорівнює осьовій довжині корпусу), - підвищені вимоги до точності виготовлення зовнішньої бічної поверхні полюсних наконечників, яка має форму правильного багатогранника, і до точності встановлення полюсних наконечників ОДИН ЩОДО ІНШОГО Як прототип обрано модульний магніторідинний герметизатор (див Кирей ПС , Кельина С Ю , Шевченко Н Д "Анализ путей усовершенствования магнитожидкостных герметизаторов для вакуумной техники" - Сборник докладов 5-й Международной конференции "Вакуумные технологии и оборудование" - Харьков ННЦ ХФТИ, 2002 - С 311, рис 10), що містить нерухомий щодо корпусу привода магнітний модуль, який складається з кільцевого постійного магніту, полюсних наконечників, внутрішнього і зовнішнього немагнітних кілець, і рухомий в осьовому і кутовому напрямках щодо магнітного модуля магнітокеруючий модуль, який виконаний у вигляді кільцевого шунтуючого магнітопровода, причому магнітний модуль обхоплений магнітокеруючим модулем На внутрішній бічній поверхні магнітокеруючого модуля (кільцевого шунтуючого магнітопровода) виконано гвинтову різь, а на ЗОВНІШНІЙ бічній поверхні магнітного модуля, яка складається із ЗОВНІШНІХ бічних поверхонь полюсних наконечників та зовнішньої бічної поверхні зовнішнього немагнітного кільця, виконано відповідну гвинтову різь, що забезпечує плавність регулювання магнітної індукції і зниження величини необхідного для зрушення механічного зусилля у порівнянні з розглянутими вище герметизаторами Крім того, забезпечується зниження масогабаритних характеристик за рахунок реалізації безкорпусного варіанта виконання герметизатора Проте прототип також має деякі негативні властивості - підвищені масо-габаритні характеристики внаслідок значної осьової довжини рухомого шунтуючого магнітопровода (яка дорівнює осьовій довжині магнітного модуля) і радіальним компонуванням магнітного і магнітокеруючого модулей, - підвищене значення площі контакту магнітного і м а гніто керуючого модулей, що обумовлює підвищені значення величини механічного зусилля, необхідного для зрушення рухомого модуля, і величини механічного моменту, необхідного для обертання рухомого модуля, - широкий діапазон зміни площі контакту магнітного і магаїтокеруючого модулей у процесі роботи, що обумовлює широкий діапазон зміни величини механічного зусилля, необхідного для 56723 зрушення рухомого модуля, і величини механічного моменту, необхідного для обертання рухомого модуля В основу винаходу поставлено задачу удосконалення модульного магаїторідинного герметизатора, зміна конструкції якого забезпечує зниження його масо-габаритіх характеристик та величини механічного зусилля і механічного моменту, необхідних для зрушення й обертання рухомого модуля Поставлена задача віршується тим, що в магніторідинному герметизаторі, який містить нерухомий щодо корпусу привода магнітний модуль, що складається з кільцевого постійного магніту, полюсних наконечників, внутрішнього і зовнішнього немагнітних кілець, рухомий в осьовому і кутовому напрямках щодо магнітного модуля магнітокеруючий модуль, який виконано у вигляді кільцевого шунтуючого магнітопровода, на внутрішній бічній поверхні якого виконано гвинтову різь, і магнітну рідину в робочому зазорі між полюсними наконечниками й обхопленим ними валом, ВІДПОВІДНО до винаходу магнітокеруючий модуль встановлено щодо магнітного модуля з утворенням торцевого регульованого зазору між, щонайменше, одним з полюсних наконечників і кільцевим шунтуючим магнітопроводом причому один з полюсних наконечників виконано у вигляді обичайки з внутрішнім кільцевим виступом, на внутрішній торцевій поверхні якого з зазором щодо внутрішньої поверхні обичайки встановлено кільцевий постійний магніт, на ЗОВНІШНІЙ торцевій поверхні другого полюсного наконечника виконано кільцевий бурт, а на ЗОВНІШНІЙ циліндричній поверхні останнього виконано гвинтову різь, яка відповідна гвинтовій різі, наявній на внутрішній бічній поверхні кільцевого шунтуючого магнітопровода Встановлення рухомого магнітокеруючого модуля щодо нерухомого магнітного модуля з утворенням торцевого регульованого зазору між, щонайменше, одним з полюсних наконечників і кільцевим шунтуючим магнітопроводом забезпечує можливість регулювання магнітної індукції за рахунок осьового переміщення рухомого магнітокеруючого модуля При цьому забезпечується зниження масо-габаритних характеристик герметизатора в порівнянні з герметизаторами, які мають радіальне компонування магнітного і м а гніто керуючого модулей, тому що значно зменшуються осьова довжина рухомого модуля та осьова довжина напрямної рухомого модуля Зменшення осьової довжини рухомого модуля призводить до зменшення площі контакту магнітного і манітокеруючого модулей, що обумовлює зниження величини механічного зусилля, необхідного для зрушення рухомого модуля, і величини механічного моменту, необхідного для обертання рухомого модуля При цьому площа контакту магнітного і м а гніто керуючого модулей залишається постійною, що обумовлює звуження діапазону зміни величини механічного зусилля, необхідного для зрушення рухомого модуля, і величини механічного моменту, необхідного для обертання рухомого модуля Звуження діапазону зміни величини механічного зусилля, необхідного для зрушення рухомого модуля, і величини ме ханічного моменту, необхідного для обертання рухомого модуля, дозволяє оптимізувати режим роботи приводу примусового обертання рухомого модуля, якщо герметизатор обладнаний таким приводом Виконання одного з полюсних наконечників у вигляді обичайки з внутрішнім кільцевим виступом, на внутрішній торцевій поверхні якого з зазором щодо внутрішньої поверхні обичайки встановлено кільцевий постійний магніт, забезпечує можливість осьового компонування магнітного і м а гніто керуючого модулей і можливість формування торцевого регульованого зазору між, щонайменше, одним з полюсних наконечників і кільцевим шунтуючим магнітопроводом Виконання кільцевого бурту на ЗОВНІШНІЙ торцевій поверхні другого полюсного наконечника забезпечує можливість приєднання м а гніто керуючого модуля до магнітного модуля Виконання гвинтової різі на ЗОВНІШНІЙ циліндричній поверхні кільцевого бурту, яка відповідна гвинтовій різі, що наявна на внутрішній бічній поверхні кільцевого шунтуючого магнітопровода, забезпечує плавність переміщення м а гніто керуючого модуля в осьовому і кутовому напрямках щодо магнітного модуля і, як наслідок, плавність регулювання магнітної індукції в робочому зазорі Таким чином, зміна конструкції модульного магніторідинного герметизатора забезпечує - зниження масо-габарюних характеристик герметизатора за рахунок зниження в 5 10 разів осьової довжини кільцевого шунтуючого магнітопровода та його напрямної, а також за рахунок осьового компонування магнітного і магнітокеруючого модулей, - зниження величини механічного зусилля, необхідного для зрушення рухомого модуля, і величини механічного моменту, необхідного для обертання рухомого модуля, за рахунок зниження в 5 10 разів площі контакту магнітного і магнітокеруючого модулей, - звуження діапазону зміни величини механічного зусилля, необхідного для зрушення рухомого модуля, і величини механічного моменту, необхідного для обертання рухомого модуля, за рахунок стабілізації величини площі контакту магнітного і м а гніто керуючого модулей На фіг 1 схематично зображено модульний магніторідинний герметизатор з торцевим регульованим зазором між кожним з полюсних наконечників та кільцевим шунтуючим магнітопроводом, поздовжній розріз, на фіг 2 - модульний магнітний герметизатор з торцевим ре гульовим зазором між одним з полюсних наконечників і кільцевим шунтуючим магнітопроводом, поздовжній розріз Модульний магніторідинний герметизатор містить нерухомий щодо корпусу привода магнітний модуль, який складається з полюсного наконечника, що виконаний у вигляді обичайки 1 з внутрішнім кільцевим виступом 2, на внутрішній торцевій поверхні якого з зазором щодо внутрішньої поверхні обичайки 1 встановлено кільцевий постійний магніт 3, полюсного наконечника 4, на ЗОВНІШНІЙ торцевій поверхні якого виконано кільцевий бурт 5, внутрішнього 6 і зовнішнього 7 немагнітних кілець, і рухомий в осьовому і куто 56723 вому напрямках щодо магнітного модуля магнітокеруючий модуль, який виконано у вигляді кільцевого шунтуючого магнітопровода 8 Магнітну рідину 9 розміщено в робочому зазорі бо між полюсними наконечниками 2, 4 і обхопленим ними валом 10 Між ПОЛЮСНИМИ наконечниками 1-2, 4 та кільцевим шунтуючим магнітопроводом 8 створено торцевий регульований зазор 5і На ЗОВНІШНІЙ циліндричній поверхні кільцевого бурту 5 виконано гвинтову різь, яка відповідна гвинтовій різі, що наявна на внутрішній бічній поверхні кільцевого шунтуючого магнітопровода 8 При збігу величини зовнішнього діаметра кільцевого бурту 5 з величиною зовнішнього діаметра полюсного наконечника 4 (див фіг 2) торцевий регульований зазор 5і формується між полюсним наконечником 1-2 та кільцевим шунтуючим магнітопроводом 8 Пристрій працює так Магнітний потік, який створюється постійним магнітом 3, замикається через полюсні наконечники 2, 4 і вал 10, утримуючи магнітну рідину 9 у робочому зазорі бо і забезпечуючи герметизацію вала 10 як у динамічному, так і у зупиночному режимах роботи Регулювання магнітної індукції в робочому зазорі бо здійснюється шляхом осьового зрушення магнітокеруючою модуля 8 щодо магнітного модуля, який складається з кільцевого постійного магніту 3, полюсних наконечників 1-2 і 4, внутрішнього 6 і зовнішнього 7 немагнітних 8 кілець, при нагвинчуванні (вигвинчуванні) кільцевого шунтуючого магнітопровода 8 на кільцевий бурт 5 Нульовому значенню величини торцевого регульованого зазору 5і відповідає мінімальне значення основного магнітного потоку, при збільшенні 5і відбувається збільшення основного магнітного потоку, і, ВІДПОВІДНО, магнітної індукції і градієнта напруженості магнітного поля в робочому зазорі бо Використання винаходу в порівнянні з прототипом та іншими відомими пристроями дозволяє - знизити масо-габаритні характеристики герметизатора за рахунок, зниження в 5 10 разів осьової довжини кільцевого шунтуючого магнітопровода та його напрямної, а також за рахунок осьового компонування магнітного і магнітокеруючого модулей, - знизити величину механічного зусилля, необхідного для зрушення рухомого модуля, і величину механічного моменту, необхідного для обертання рухомого модуля, за рахунок зниження в 5 10 разів площі контакту магнітного і магнітокеруючого модулей, - звузити діапазон зміни величини механічного зусилля, необхідного для зрушення рухомого модуля, і величину механічного моменту, необхідного для обертання рухомого модуля, за рахунок стабілізації величини площі контакту магнітного і магнітокеруючого модулей Підписано до друку 05 06 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюModule magneto-liquid sealer
Автори англійськоюKirei Petro Serafymovych
Назва патенту російськоюМодульный магнитожидкостный герметизатор
Автори російськоюКирей Петр Серафимович
МПК / Мітки
МПК: F16J 15/40
Мітки: герметизатор, модульний, магніторідинний
Код посилання
<a href="https://ua.patents.su/4-56723-modulnijj-magnitoridinnijj-germetizator.html" target="_blank" rel="follow" title="База патентів України">Модульний магніторідинний герметизатор</a>
Модульний магніторідинний герметизатор
Номер патенту: 56684
Опубліковано: 15.05.2003
Автор: Кірей Петро Серафимович
МПК: F16J 15/40
Мітки: герметизатор, модульний, магніторідинний
Формула / Реферат:
Модульний магніторідинний герметизатор, що містить нерухомий щодо корпусу приводу магнітний модуль, що складається з кільцевого постійного магніту, полюсних наконечників, внутрішнього і зовнішнього немагнітних кілець, рухомий в осьовому і кутовому напрямках щодо магнітного модуля магнітокеруючий модуль, який виконано у вигляді шунтувального магнітопроводу, на внутрішній бічній поверхні якого виконано гвинтову різь, і магнітну рідину в...
Модульний магніторідинний герметизатор
Номер патенту: 55174
Опубліковано: 17.03.2003
Автор: Кірей Петро Серафимович
МПК: F16J 15/40
Мітки: магніторідинний, модульний, герметизатор
Формула / Реферат:
Модульний магніторідинний герметизатор, що містить нерухомий щодо корпусу приводу полюсний модуль, що складається з герметично з'єднаних у порядку чергування полюсних наконечників і немагнітного кільцевого елемента; рухомий в осьовому і кутовому напрямках щодо полюсного модуля магнітний модуль, який складається з полюсних наконечників і кільцевого постійного магніту у порядку чергування, і магнітну рідину в робочому зазорі між полюсними...
Магніторідинний герметизатор
Номер патенту: 48676
Опубліковано: 15.08.2002
Автор: Кірей Петро Серафимович
МПК: F16J 15/40
Мітки: магніторідинний, герметизатор
Формула / Реферат:
1. Магніторідинний герметизатор, який містить кільцевий постійний магніт з полюсними наконечниками, один із яких виконано у вигляді приєднувального фланця, внутрішнє і зовнішнє немагнітні кільця, які встановлені між полюсними наконечниками і співвісно з ними, і магнітну рідину в робочому зазорі між полюсними наконечниками й обхопленим ними валом, який відрізняється тим, що полюсні наконечники виконані з однаковим зовнішнім діаметром і...
Магніторідинний герметизатор
Номер патенту: 47834
Опубліковано: 15.07.2002
Автор: Кірей Петро Серафимович
МПК: F16J 15/40
Мітки: магніторідинний, герметизатор
Формула / Реферат:
1. Магніторідинний герметизатор, який містить приєднувальний фланець, полюсні наконечники, що обхоплені магнітною системою, немагнітні кільцеві елементи, що чергуються з полюсними наконечниками і герметично з'єднані з ними, і магнітну рідину в робочому зазорі між полюсними наконечниками й обхопленим ними валом, який відрізняється тим, що магнітну систему виконано у вигляді окремого вузла, рухливого в осьовому напрямку щодо полюсних...
Магніторідинний герметизатор
Номер патенту: 47792
Опубліковано: 15.07.2002
Автор: Кірей Петро Серафимович
МПК: F16J 15/40
Мітки: герметизатор, магніторідинний
Формула / Реферат:
1. Магніторідинний герметизатор, який містить приєднувальний фланець, полюсні наконечники, що обхоплені радіально-намагніченими постійними магнітами, зовнішні полюси яких з'єднані між собою магнітопровідними елементами, немагнітні кільцеві елементи, що чергуються з полюсними наконечниками і герметично з'єднані з ними, і магнітну рідину в робочому зазорі між полюсними наконечниками й обхопленим ними валом, який відрізняється тим, що зовнішню...
Попередній патент: Пристрій для вимірювання кутової швидкості та прискорення
Наступний патент: Спосіб виробництва агломерату